
Comparison of Low-Cost Commercial Unpiloted Digital Aerial Photogrammetry to Airborne Laser Scanning across Multiple Forest Types in California, USA


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Field Data
2.3. Lidar Data
2.4. UAS DAP Data
2.5. Lidar and DAP Point Cloud Processing
2.6. Statistical Analyses
3. Results
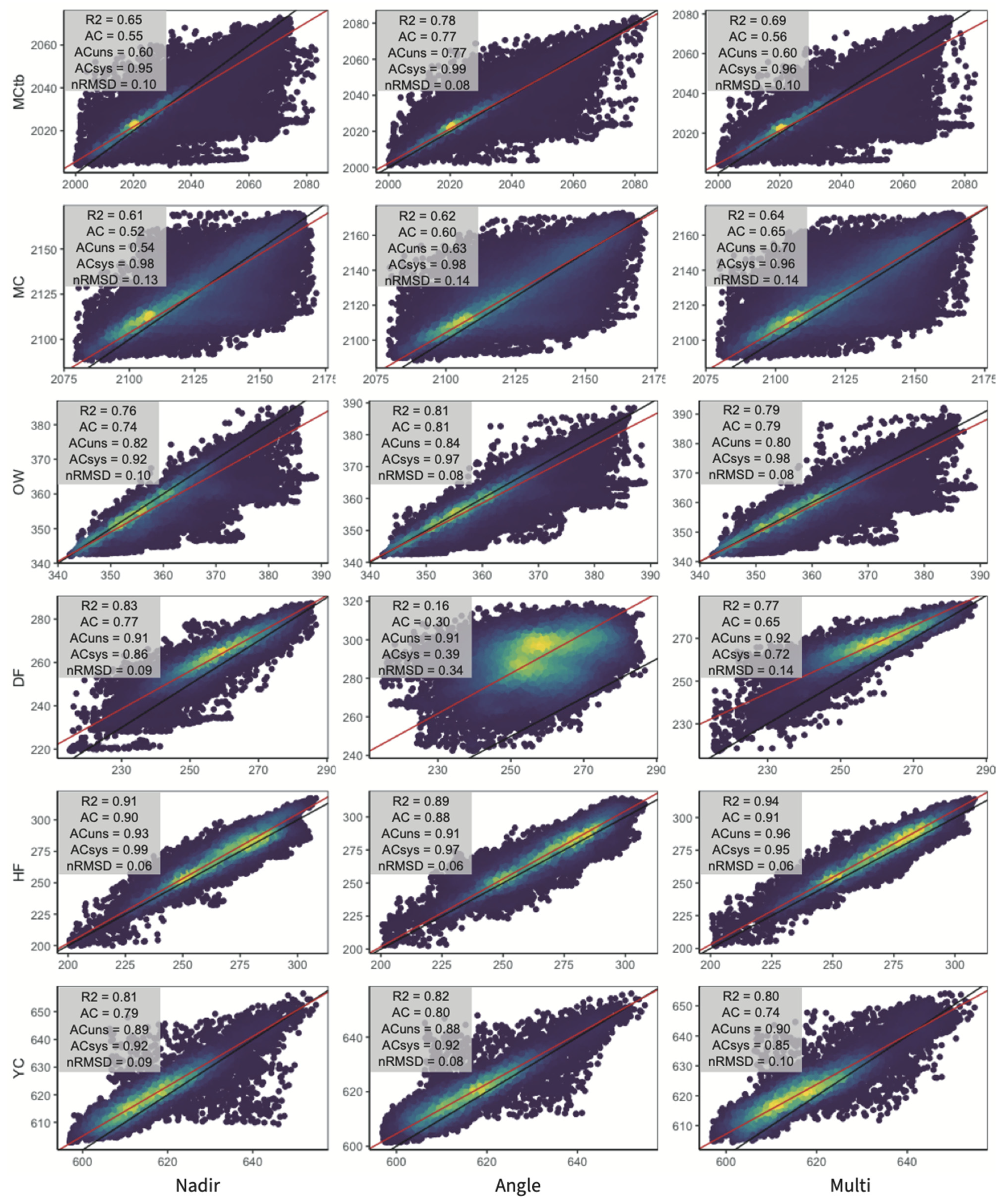
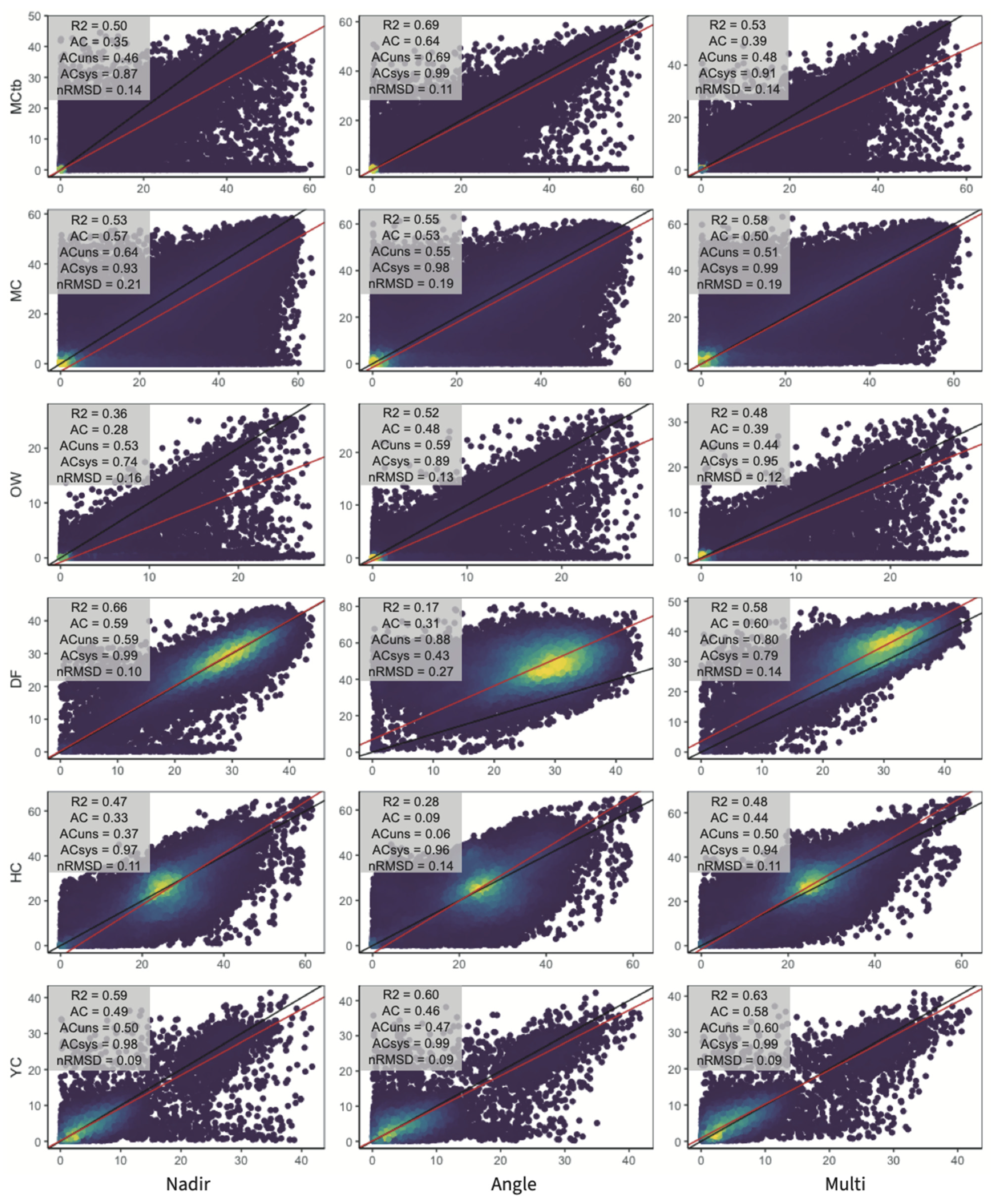
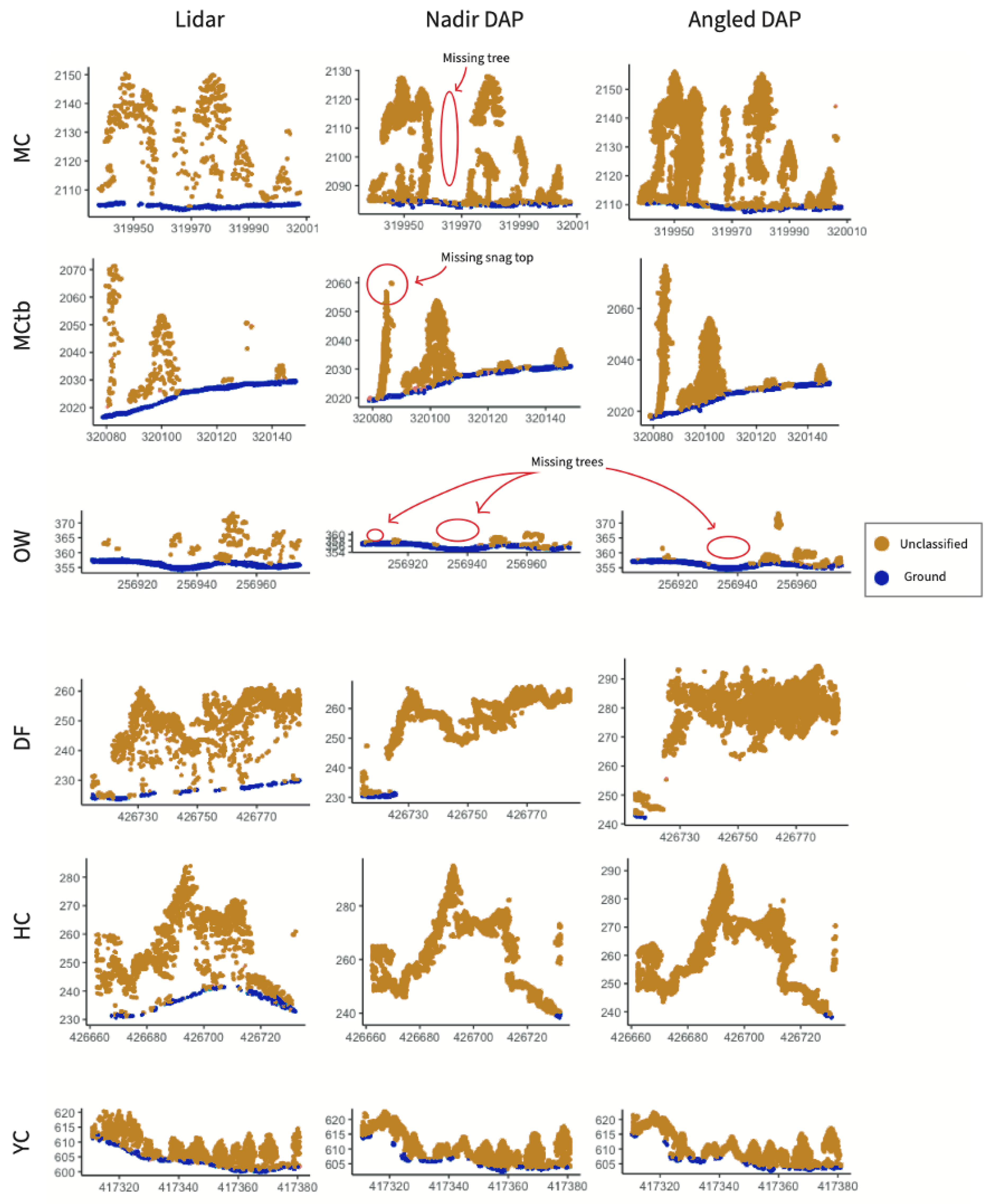
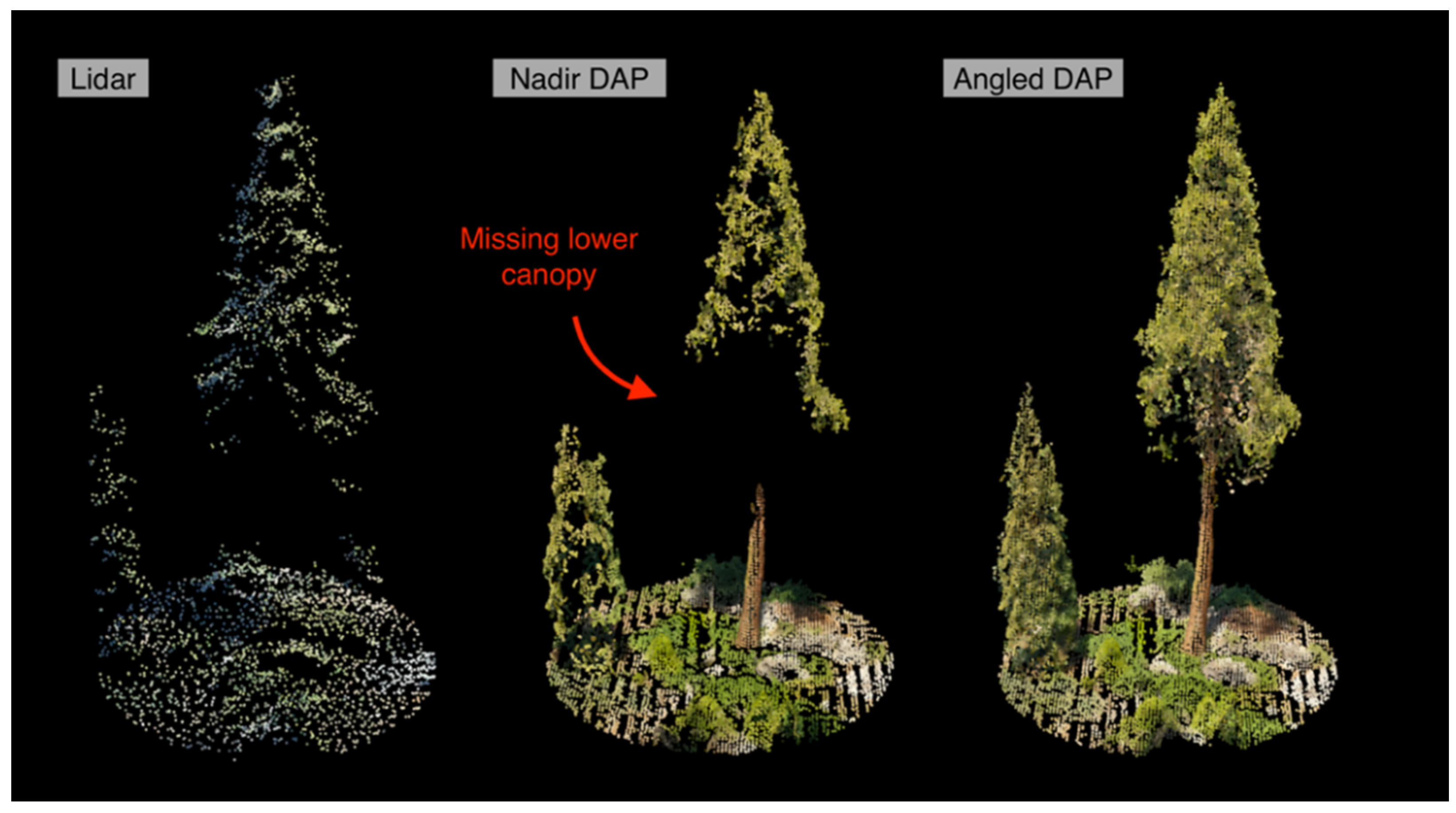
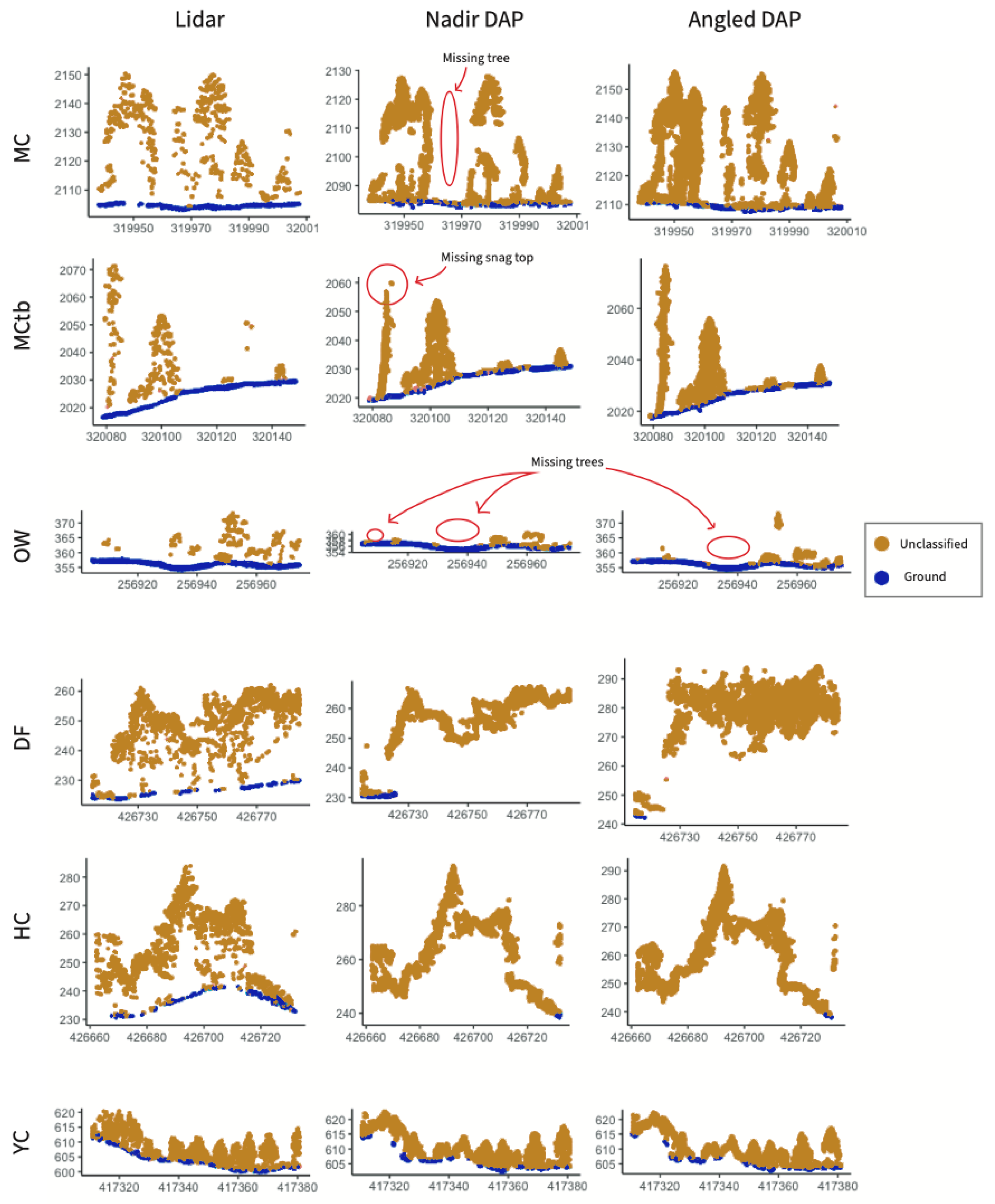
3.1. Accuracy of UAS DAP Surface Models
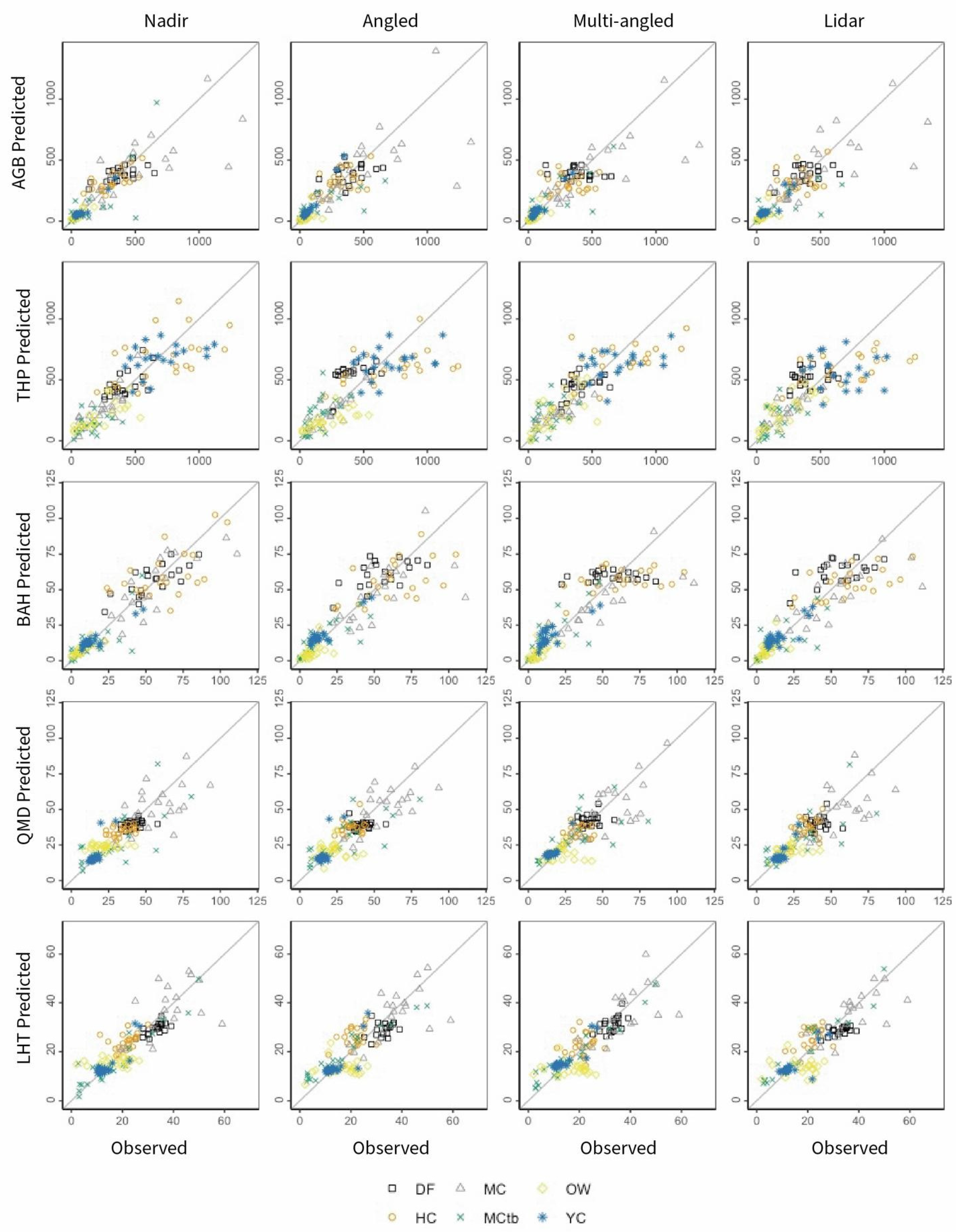
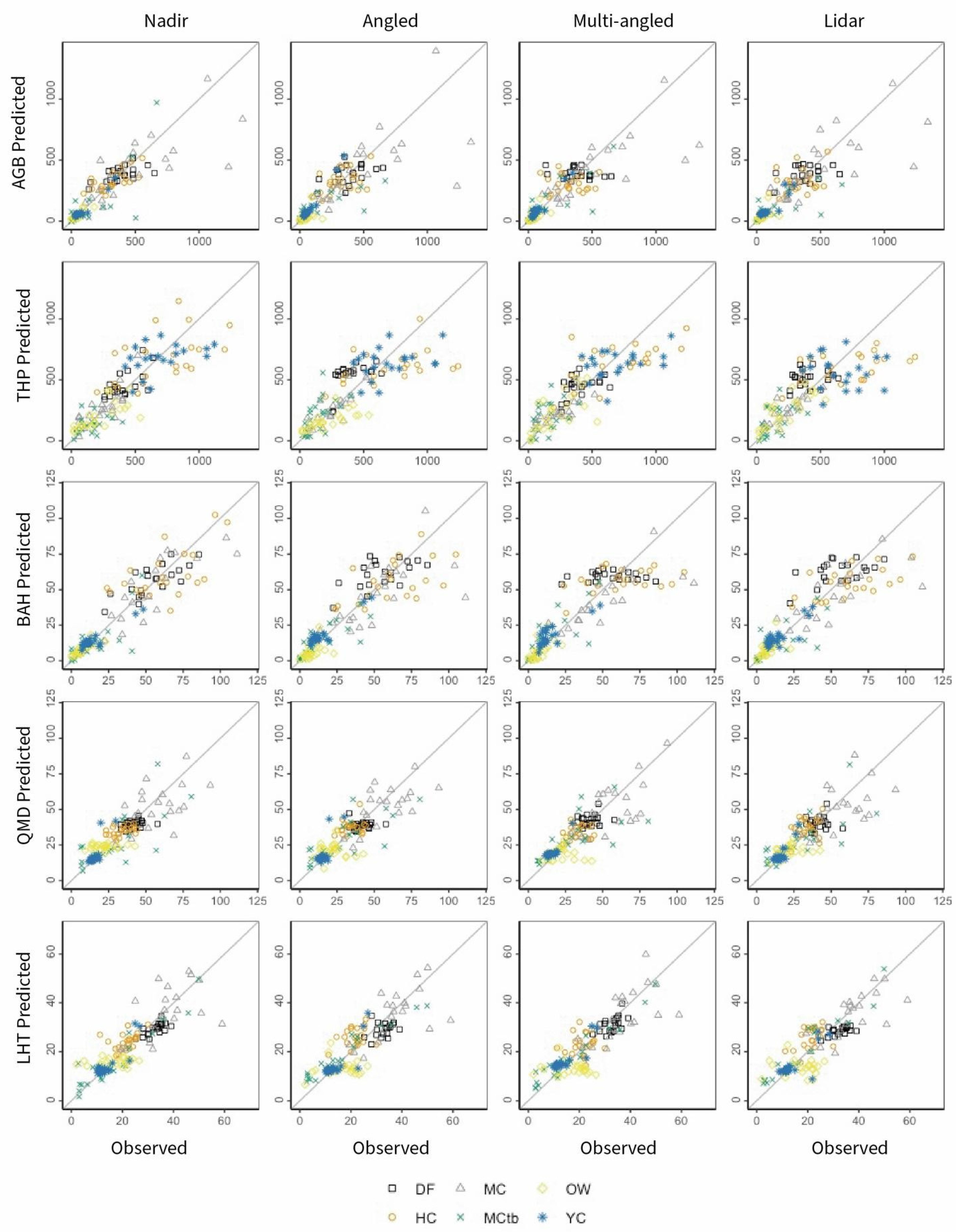
3.2. Accuracy of UAS Forest Attribute Predictions
4. Discussion
4.1. UAS Surface Models
4.2. Accuracy of UAS Forest Metric Predictions
4.3. Value of Off-Nadir Imagery in DAP Surface Models and Forest Attribute Predictions
4.4. Limitations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bechtold, W.A.; Patterson, P.L. The Enhanced Forest Inventory and Analysis Program-National Sampling Design and Estimation Procedures; Bechtold, W.A., Patterson, P.L., Eds.; USDA Forest Service, Southern Research Station: Asheville, NC, USA, 2015; Volume 80, pp. 27–42.
- Gillis, M.D.; Omule, A.Y.; Brierley, T. Monitoring Canada’s forests: The national forest inventory. For. Chron. 2005, 81, 214–221. [Google Scholar] [CrossRef]
- Tomppo, E.; Gschwantner, T.; Lawrence, M.; McRoberts, R.E. National Forest Inventories: Pathways for Common Reporting; Springer: Amsterdam, The Netherlands, 2010; ISBN 9789048132324. [Google Scholar]
- Wulder, M.A.; Kurz, W.A.; Gillis, M. National level forest monitoring and modeling in Canada. Prog. Plann. 2004, 61, 365–381. [Google Scholar] [CrossRef]
- Rao, J.N.K. Small-Area Estimation. In Wiley StatsRef: Statistics Reference Online; John Wiley & Sons, Ltd.: Chichester, UK, 2017; pp. 1–8. [Google Scholar]
- Ohmann, J.L.; Gregory, M.J. Predictive mapping of forest composition and structure with direct gradient analysis and nearest-neighbor imputation in coastal Oregon, U.S.A. Can. J. For. Res. 2002, 32, 725–741. [Google Scholar] [CrossRef]
- Tomppo, E.; Olsson, H.; Ståhl, G.; Nilsson, M.; Hagner, O.; Katila, M. Combining national forest inventory field plots and remote sensing data for forest databases. Remote Sens. Environ. 2008, 112, 1982–1999. [Google Scholar] [CrossRef]
- Wilson, B.T.; Woodall, C.W.; Griffith, D.M. Imputing forest carbon stock estimates from inventory plots to a nationally continuous coverage. Carbon Balance Manag. 2013, 8, 1. [Google Scholar] [CrossRef] [Green Version]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Andréfouët, S.; Cohen, W.B.; Gómez, C.; Griffiths, P.; Hais, M.; Healey, S.P.; Helmer, E.H.; Hostert, P.; Lyons, M.B.; et al. Bringing an ecological view of change to landsat-based remote sensing. Front. Ecol. Environ. 2014, 12, 339–346. [Google Scholar] [CrossRef]
- Wu, Z.; Dye, D.; Vogel, J.; Middleton, B. Estimating Forest and Woodland Aboveground Biomass Using Active and Passive Remote Sensing. Photogramm. Eng. Remote Sens. 2016, 82, 271–281. [Google Scholar] [CrossRef]
- Turner, D.P.; Cohen, W.B.; Kennedy, R.E.; Fassnacht, K.S.; Briggs, J.M. Relationships between Leaf Area Index and Landsat TM Spectral Vegetation Indices across Three Temperate Zone Sites. Remote Sens. Environ. 1999, 70, 52–68. [Google Scholar] [CrossRef]
- Lu, D. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Pierce, K.B.; Ohmann, J.L.; Wimberly, M.C.; Gregory, M.J.; Fried, J.S. Mapping wildland fuels and forest structure for land management: A comparison of nearest neighbor imputation and other methods. Can. J. For. Res. 2009, 39, 1901–1916. [Google Scholar] [CrossRef]
- Zald, H.S.J.; Ohmann, J.L.; Roberts, H.M.; Gregory, M.J.; Henderson, E.B.; McGaughey, R.J.; Braaten, J. Influence of lidar, Landsat imagery, disturbance history, plot location accuracy, and plot size on accuracy of imputation maps of forest composition and structure. Remote Sens. Environ. 2014, 143, 26–38. [Google Scholar] [CrossRef]
- Eskelson, B.N.I.; Temesgen, H.; Hagar, J.C. A comparison of selected parametric and imputation methods for estimating snag density and snag quality attributes. For. Ecol. Manage. 2012, 272, 26–34. [Google Scholar] [CrossRef]
- Dubayah, R.O.; Drake, J.B. Lidar Remote Sensing for Forestry Applications. J. For. 2000, 98, 44–46. [Google Scholar]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. Lidar Remote Sensing for Ecosystem Studies: Lidar, an emerging remote sensing technology that directly measures the three-dimensional distribution of plant canopies, can accurately estimate vegetation structural attributes and should be of particular inte. Bioscience 2002, 52, 19–30. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; Andersen, H.; Mcgaughey, R.J. Light Detection and Ranging (LIDAR): An Emerging Tool for Multiple Resource Inventory. J. For. 2005, 103, 286–292. [Google Scholar] [CrossRef]
- Andersen, H.E.; Strunk, J.; Temesgen, H.; Atwood, D.; Winterberger, K. Using multilevel remote sensing and ground data to estimate forest biomass resources in remote regions: A case study in the boreal forests of interior Alaska. Can. J. Remote Sens. 2012, 37, 596–611. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef] [Green Version]
- Butler, B.J. Family Forest Owners of the United States, 2006; General Technical Report NRS-27; U.S. Department of Agriculture, Forest Service, Northern Research Station: Newtown Square, PA, USA, 2008; Volume 27, p. 72. [CrossRef]
- Ota, T.; Ogawa, M.; Shimizu, K.; Kajisa, T.; Mizoue, N.; Yoshida, S.; Takao, G.; Hirata, Y.; Furuya, N.; Sano, T.; et al. Aboveground biomass estimation using structure from motion approach with aerial photographs in a seasonal tropical forest. Forests 2015, 6, 3882–3898. [Google Scholar] [CrossRef] [Green Version]
- Shin, P.; Sankey, T.; Moore, M.M.; Thode, A.E. Evaluating unmanned aerial vehicle images for estimating forest canopy fuels in a ponderosa pine stand. Remote Sens. 2018, 10, 1266. [Google Scholar] [CrossRef] [Green Version]
- Swetnam, T.L.; Gillan, J.K.; Sankey, T.T.; McClaran, M.P.; Nichols, M.H.; Heilman, P.; McVay, J. Considerations for Achieving Cross-Platform Point Cloud Data Fusion across Different Dryland Ecosystem Structural States. Front. Plant Sci. 2018, 8, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Strunk, J.; Packalen, P.; Gould, P.; Gatziolis, D.; Maki, C.; Andersen, H.-E.; McGaughey, R.J. Large Area Forest Yield Estimation with Pushbroom Digital Aerial Photogrammetry. Forests 2019, 10, 397. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Iizuka, K.; Yonehara, T.; Itoh, M.; Kosugi, Y. Estimating Tree Height and Diameter at Breast Height (DBH) from Digital surface models and orthophotos obtained with an unmanned aerial system for a Japanese Cypress (Chamaecyparis obtusa) Forest. Remote Sens. 2018, 10, 13. [Google Scholar] [CrossRef] [Green Version]
- McClelland, M.P.; van Aardt, J.; Hale, D. Manned aircraft versus small unmanned aerial system—forestry remote sensing comparison utilizing lidar and structure-from-motion for forest carbon modeling and disturbance detection. J. Appl. Remote Sens. 2019, 14, 22202. [Google Scholar] [CrossRef]
- Alonzo, M.; Andersen, H.-E.; Morton, D.; Cook, B. Quantifying Boreal Forest Structure and Composition Using UAV Structure from Motion. Forests 2018, 9, 119. [Google Scholar] [CrossRef] [Green Version]
- Bryson, M.; Reid, A.; Ramos, F.; Sukkarieh, S. Airborne vision-based mapping and classification of large farmland environments. J. Field Robot. 2010, 27, 632–655. [Google Scholar] [CrossRef]
- Sanz-Ablanedo, E.; Chandler, J.; Rodríguez-Pérez, J.; Ordóñez, C. Accuracy of Unmanned Aerial Vehicle (UAV) and SfM Photogrammetry Survey as a Function of the Number and Location of Ground Control Points Used. Remote Sens. 2018, 10, 1606. [Google Scholar] [CrossRef] [Green Version]
- Fankhauser, K.; Strigul, N.; Gatziolis, D. Augmentation of Traditional Forest Inventory and Airborne Laser Scanning with Unmanned Aerial Systems and Photogrammetry for Forest Monitoring. Remote Sens. 2018, 10, 1562. [Google Scholar] [CrossRef] [Green Version]
- Frey, J.; Kovach, K.; Stemmler, S.; Koch, B. UAV Photogrammetry of forests as a vulnerable process. A sensitivity analysis for a structure from motion RGB-image pipeline. Remote Sens. 2018, 10, 912. [Google Scholar] [CrossRef] [Green Version]
- Navarro, A.; Young, M.; Allan, B.; Carnell, P.; Macreadie, P.; Ierodiaconou, D. The application of Unmanned Aerial Vehicles (UAVs) to estimate above-ground biomass of mangrove ecosystems. Remote. Sens. Environ. 2020, 242, 111747. [Google Scholar] [CrossRef]
- Perroy, R.L.; Sullivan, T.; Stephenson, N. Assessing the impacts of canopy openness and flight parameters on detecting a sub-canopy tropical invasive plant using a small unmanned aerial system. ISPRS J. Photogramm. Remote Sens. 2017, 125, 174–183. [Google Scholar] [CrossRef]
- Wallace, L.; Bellman, C.; Hally, B.; Hernandez, J.; Jones, S.; Hillman, S. Assessing the ability of image-based point clouds captured from a UAV to measure the terrain in the presence of canopy cover. Forests 2019, 10, 284. [Google Scholar] [CrossRef] [Green Version]
- Moreira, B.M.; Goyanes, G.; Pina, P.; Vassilev, O.; Heleno, S. Assessment of the Influence of Survey Design and Processing Choices on the Accuracy of Tree Diameter at Breast Height (DBH) Measurements Using UAV-Based Photogrammetry. Drones 2021, 5, 43. [Google Scholar] [CrossRef]
- North, M.; Oakley, B.; Chen, J.; Erickson, H.; Gray, A.; Izzo, A.; Johnson, D.; Ma, S.; Marra, J.; Meyer, M.; et al. Vegetation and Ecological Characteristics of Mixed-Conifer and Red Fir Forests at the Teakettle Experimental Forest; United States Department of Agriculture: Washington, DC, USA, 2002.
- North, M.; Innes, J.; Zald, H. Comparison of thinning and prescribed fire restoration treatments to Sierran mixed-conifer historic conditions. Can. J. For. Res. 2007, 342, 331–342. [Google Scholar] [CrossRef]
- Emlid RTKLIB QT Apps. Available online: https://files.emlid.com/RTKLIB/rtklib-qt-win-b33.zip (accessed on 18 October 2021).
- Steel, Z.L.; Goodwin, M.J.; Meyer, M.D.; Fricker, G.A.; Zald, H.S.J.; Hurteau, M.D.; North, M.P. Do forest fuel reduction treatments confer resistance to beetle infestation and drought mortality? Ecosphere 2021, 12, e03344. [Google Scholar] [CrossRef]
- Chojnacky, D.C.; Heath, L.S.; Jenkins, J.C. Updated generalized biomass equations for North American tree species. Forestry 2014, 87, 129–151. [Google Scholar] [CrossRef] [Green Version]
- Roussel, J.R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Meador, A.S.; Bourdon, J.F.; de Boissieu, F.; Achim, A. lidR: An R package for analysis of Airborne Laser Scanning (ALS) data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Swayze, N.C.; Tinkham, W.T.; Vogeler, J.C.; Hudak, A.T. Influence of flight parameters on UAS-based monitoring of tree height, diameter, and density. Remote Sens. Environ. 2021, 263, 112540. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK Method—An Optimal Solution for Mapping Inaccessible Forested Areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef] [Green Version]
- Gerke, M.; Przybilla, H.J. Accuracy analysis of photogrammetric UAV image blocks: Influence of onboard RTK-GNSS and cross flight patterns. Photogramm. Fernerkund. Geoinf. 2016, 2016, 17–30. [Google Scholar] [CrossRef] [Green Version]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Kim, J.; Cho, J. Delaunay triangulation-based spatial clustering technique for enhanced adjacent boundary detection and segmentation of lidar 3d point clouds. Sensors 2019, 19, 3926. [Google Scholar] [CrossRef] [Green Version]
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M.; Wang, T.; Hussin, Y.A. Generating Pit-free Canopy Height Models from Airborne Lidar. Photogramm. Eng. Remote. Sens. 2014, 80, 863–872. [Google Scholar] [CrossRef]
- Pretzsch, H. Description and Analysis of Stand Structures. In Forest Dynamics, Growth and Yield; Springer: Berlin/Heidelberg, Germany, 2009; pp. 223–289. [Google Scholar]
- Riemann, R.; Wilson, B.T.; Lister, A.; Parks, S. An effective assessment protocol for continuous geospatial datasets of forest characteristics using USFS Forest Inventory and Analysis (FIA) data. Remote Sens. Environ. 2010, 114, 2337–2352. [Google Scholar] [CrossRef]
- Lumley, T.; Miller, A. Leaps: Regression Subset Selection 2020. R Package Version 3.1. Available online: https://CRAN.R-project.org/package=leaps (accessed on 1 September 2021).
- Kuhn, M. Caret: Classification and Regression Training 2020. R Paclage Version 6.0-90. Available online: https://CRAN.R-project.org/package=caret (accessed on 1 September 2021).
- Jayathunga, S.; Owari, T.; Tsuyuki, S. The use of fixed–wing UAV photogrammetry with LiDAR DTM to estimate merchantable volume and carbon stock in living biomass over a mixed conifer–broadleaf forest. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 767–777. [Google Scholar] [CrossRef]
- Dandois, J.; Olano, M.; Ellis, E. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S. Use of Photogrammetric 3D Data for Forest Inventory. Ph.D. Thesis, Norwegian University of Life Sciences, Ås, Norway, 2017. [Google Scholar]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Lucieer, A.; Malenovskỳ, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef] [Green Version]
- Dandois, J.P.; Ellis, E.C. Remote sensing of vegetation structure using computer vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef] [Green Version]
- Belmonte, A.; Sankey, T.; Biederman, J.A.; Bradford, J.; Goetz, S.J.; Kolb, T.; Woolley, T. UAV-derived estimates of forest structure to inform ponderosa pine forest restoration. Remote Sens. Ecol. Conserv. 2020, 6, 181–197. [Google Scholar] [CrossRef]
- Giannetti, F.; Chirici, G.; Gobakken, T.; Næsset, E.; Travaglini, D.; Puliti, S. A new approach with DTM-independent metrics for forest growing stock prediction using UAV photogrammetric data. Remote Sens. Environ. 2018, 213, 195–205. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q. A practical method for SRTM DEM correction over vegetated mountain areas. ISPRS J. Photogramm. Remote Sens. 2014, 87, 216–228. [Google Scholar] [CrossRef]
- Carabajal, C.C.; Harding, D.J. ICESat validation of SRTM C-band digital elevation models. Geophys. Res. Lett. 2005, 32, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Carabajal, C.C.; Harding, D.J. SRTM C-band and ICESat laser altimetry elevation comparisons as a function of tree cover and relief. Photogramm. Eng. Remote Sens. 2006, 72, 287–298. [Google Scholar] [CrossRef] [Green Version]
- Tompalski, P.; Coops, N.C.; White, J.C.; Wulder, M.A. Simulating the impacts of error in species and height upon tree volume derived from airborne laser scanning data. For. Ecol. Manage. 2014, 327, 167–177. [Google Scholar] [CrossRef]
- Lovitt, J.; Rahman, M.M.; McDermid, G.J. Assessing the Value of UAV Photogrammetry for Characterizing Terrain in Complex Peatlands. Remote Sens. 2017, 9, 715. [Google Scholar] [CrossRef] [Green Version]
- Tinkham, W.T.; Swayze, N.C. Influence of Agisoft Metashape Parameters on UAS Structure from Motion Individual Tree Detection from Canopy Height Models. Forests 2021, 12, 250. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Coomes, D.A.; Dalponte, M.; Jucker, T.; Asner, G.P.; Banin, L.F.; Burslem, D.F.R.P.; Lewis, S.L.; Nilus, R.; Phillips, O.L.; Phua, M.H.; et al. Area-based vs. tree-centric approaches to mapping forest carbon in Southeast Asian forests from airborne laser scanning data. Remote Sens. Environ. 2017, 194, 77–88. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Hyyppä, J.; Holopainen, M.; Vastaranta, M. Comparison of Area-Based and Individual Tree-Based Methods for Predicting Plot-Level Forest Attributes. Remote Sens. 2010, 2, 1481–1495. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Site | n Plots | Mean | Range | SD |
|---|---|---|---|---|---|
| AGB | MC | 20 | 536.8 | 108.9–1340.6 | 356.1 |
| (Mg/ha) | MCtb | 22 | 127.4 | 0.17–668.4 | 192.9 |
| OW | 23 | 47.8 | 0.22–178 | 40.3 | |
| DF | 20 | 385.6 | 137–650.7 | 127.5 | |
| HC | 22 | 322.3 | 95.4–556.1 | 124.4 | |
| YC | 21 | 79.0 | 30.7–345.7 | 83.0 | |
| TPH | MC | 20 | 241.0 | 60–520 | 137.0 |
| (Trees/ha) | MCtb | 22 | 144.6 | 20–400 | 98.9 |
| OW | 23 | 221.7 | 20–540 | 155.1 | |
| DF | 20 | 403.0 | 260–640 | 114.5 | |
| HC | 22 | 754.6 | 200–1620 | 342.3 | |
| YC | 21 | 741.0 | 420–1580 | 279.4 | |
| BAH | MC | 20 | 53.3 | 13.59–111.26 | 25.3 |
| (m2/ha) | MCtb | 22 | 13.1 | 0.09–47.36 | 14.9 |
| OW | 23 | 7.5 | 0.13–22.79 | 5.4 | |
| DF | 20 | 55.0 | 22.37–85.62 | 16.5 | |
| HC | 22 | 62.3 | 23.89–104.72 | 21.9 | |
| YC | 21 | 14.9 | 7.06–48.29 | 10.8 | |
| QMD | MC | 20 | 57.8 | 29.6–93.28 | 16.2 |
| (cm) | MCtb | 22 | 28.8 | 6.26–80.55 | 20.6 |
| OW | 23 | 21.9 | 9.1–42.7 | 8.1 | |
| DF | 20 | 41.8 | 33.1–57.82 | 5.9 | |
| HC | 22 | 62.3 | 23.89–104.72 | 21.9 | |
| YC | 21 | 15.6 | 11.45–29.76 | 3.9 | |
| LHT | MC | 20 | 37.6 | 19.41–59.07 | 9.9 |
| (m) | MCtb | 22 | 16.8 | 2.68–49.86 | 13.6 |
| OW | 23 | 17.0 | 2–26.55 | 6.5 | |
| DF | 20 | 33.0 | 25.23–39.1 | 3.4 | |
| HC | 22 | 21.3 | 11.19–30 | 4.1 | |
| YC | 21 | 13.9 | 10.16–26.71 | 4.9 |
| Parameter | Sites | ||
|---|---|---|---|
| MC, MCtb, OW | DF, HC | YC | |
| Vendor | NEON | Access Geographics | Quantum Spatial |
| Scanner | Optech Gemini | Leica City Mapper | Riegl VQ-1560i |
| Field of View | 0–50° | 40° | 58.5° |
| Flight Altitude | 1000 m AGL | 1500 m AGL | 1306 m AGL |
| Pulse Rate | 33–167 kHz | 2000 kHz | 2000 kHz |
| Scan Angle (Degrees) | 18.5° | 20° | 29.25° |
| Pulse Wavelength (nm) | 1064 nm | 1064 nm | 1064 nm |
| Point Density (Pre-filtered) | MC = 7.7 pts/m2 MCtb = 5.4 pts/m2 OW = 6.9 pts/m2 | DF = 57.4 pts/m2 HC = 37.2 pts/m2 | 110.8 pts/m2 |
| Point Density (Post-filtered) | MC = 7.7 pts/m2 MCtb = 5.4 pts/m2 OW = 6.9 pts/m2 | DF = 9.7 pts/m2 HC = 9.7 pts/m2 | 12.3 pts/m2 |
| Attribute | Model Type | Predictor Variables | R2 |
|---|---|---|---|
| AGB | Lidar | zmean + zskew + zq35 + zq65 + zq75 | 0.79 |
| DAP Nadir | zmax + zmean + pzabove2 + zq25 + zpcum1 | 0.80 | |
| DAP Angle | zsd + pzabove2 + zq15 + zq60 + zpcum1 | 0.81 | |
| DAP Multi | zsd + zentropy + pzabovezmean + zq25 + zq70 | 0.80 | |
| TPH | Lidar | pzabove2 + zq5 + zq85 + zpcum1 + zpcum2 | 0.72 |
| DAP Nadir | zsd + pzabove2 + zpcum2 + zpcum4 + zpcum5 | 0.61 | |
| DAP Angle | pzabove2 + zq80 + zpcum1 + zpcum3 + zpcum4 | 0.64 | |
| DAP Multi | zsd + pzabove2 + zpcum2 + zpcum7 + zpcum9 | 0.61 | |
| BAH | Lidar | zmax + zmean + zsd + zskew + zq25 | 0.86 |
| DAP Nadir | zmean + pzabove2 + zq25 + zq95 + zpcum9 | 0.83 | |
| DAP Angle | zsd + zentropy + pzabove2 + zq15 + zq60 | 0.82 | |
| DAP Multi | zsd + pzabovezmean + pzabove2 + zq25 + zq70 | 0.82 | |
| QMD | Lidar | zskew + zq35 + zq65 + zpcum1 + zpcum2 | 0.67 |
| DAP Nadir | zq20 + zq85 + zpcum1 + zpcum2 + zpcum6 | 0.68 | |
| DAP Angle | zq35 + zq40 + zq45 + zq60 + zq65 | 0.45 | |
| DAP Multi | zskew + zq50 + zq55 + zq60 + zpcum1 | 0.67 | |
| LHT | Lidar | zskew + zentropy + zq70 + zq75 + zpcum1 | 0.67 |
| DAP Nadir | zmean + zskew + pzabovezmean + zq85 + zpcum6 | 0.66 | |
| DAP Angle | zsd + zentropy + pzabovezmean + zq20 + zq60 | 0.69 | |
| DAP Multi | zmean + zq70 + zq75 + zq85 + zpcum6 | 0.62 |
| Model Type | AGB | TPH | BAH | QMD | LHT | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 | nRMSD | R2 | nRMSD | R2 | nRMSD | R2 | nRMSD | R2 | nRMSD | |
| Lidar | 0.74 | 0.10 | 0.68 | 0.11 | 0.84 | 0.10 | 0.68 | 0.12 | 0.75 | 0.10 |
| Nadir | 0.66 | 0.11 | 0.53 | 0.14 | 0.77 | 0.12 | 0.70 | 0.11 | 0.70 | 0.11 |
| Angled | 0.69 | 0.11 | 0.60 | 0.13 | 0.76 | 0.13 | 0.67 | 0.11 | 0.74 | 0.10 |
| Multi-angled | 0.69 | 0.10 | 0.53 | 0.13 | 0.77 | 0.12 | 0.67 | 0.12 | 0.74 | 0.11 |
| Model Type | AGB | TPH | BAH | QMD | LHT | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| R2 | nRMSD | R2 | nRMSD | R2 | nRMSD | R2 | nRMSD | R2 | nRMSD | |
| Nadir | 0.81 | 0.07 | 0.74 | 0.12 | 0.81 | 0.11 | 0.82 | 0.08 | 0.78 | 0.10 |
| Angled | 0.85 | 0.07 | 0.78 | 0.11 | 0.84 | 0.10 | 0.75 | 0.09 | 0.83 | 0.07 |
| Multi-angled | 0.80 | 0.08 | 0.68 | 0.13 | 0.83 | 0.11 | 0.66 | 0.11 | 0.79 | 0.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lamping, J.E.; Zald, H.S.J.; Madurapperuma, B.D.; Graham, J. Comparison of Low-Cost Commercial Unpiloted Digital Aerial Photogrammetry to Airborne Laser Scanning across Multiple Forest Types in California, USA. Remote Sens. 2021, 13, 4292. https://doi.org/10.3390/rs13214292
Lamping JE, Zald HSJ, Madurapperuma BD, Graham J. Comparison of Low-Cost Commercial Unpiloted Digital Aerial Photogrammetry to Airborne Laser Scanning across Multiple Forest Types in California, USA. Remote Sensing. 2021; 13(21):4292. https://doi.org/10.3390/rs13214292
Chicago/Turabian StyleLamping, James E., Harold S. J. Zald, Buddhika D. Madurapperuma, and Jim Graham. 2021. "Comparison of Low-Cost Commercial Unpiloted Digital Aerial Photogrammetry to Airborne Laser Scanning across Multiple Forest Types in California, USA" Remote Sensing 13, no. 21: 4292. https://doi.org/10.3390/rs13214292
APA StyleLamping, J. E., Zald, H. S. J., Madurapperuma, B. D., & Graham, J. (2021). Comparison of Low-Cost Commercial Unpiloted Digital Aerial Photogrammetry to Airborne Laser Scanning across Multiple Forest Types in California, USA. Remote Sensing, 13(21), 4292. https://doi.org/10.3390/rs13214292