
Inverse Dynamics-Based Motion Planning for Autonomous Vehicles: Simultaneous Trajectory and Speed Optimization with Kinematic Continuity



Abstract
1. Introduction
1.1. Literature Review
1.2. Scope and Objectives
2. Mathematical Modeling
2.1. Representing Sought-For Functions with Piecewise Polynomials
2.2. Vehicle Kinematics
3. Motion Planning Models
3.1. Planning Concept
3.2. Trajectory Numerical Modeling
3.3. Speed Distribution Modeling
3.4. Full Set of Parameters
4. Optimization Model
4.1. Nonlinear Optimization and Numerical Integration
4.2. Optimization Criteria
4.3. Constraints
5. Simulation
6. Conclusions
- Employing an inverse approach to predict AV motion references has demonstrated several advantages, including high efficiency, relatively low computational costs, and a reduced number of varying unknowns. This method is expected to yield better quality and performance compared with directly modeling trajectories using polynomials. The inverse approach achieves a better alignment between trajectory and speed models, offering greater flexibility in curvature than the polynomial model approach.
- Several key findings should be noted. First, because the method utilizes the derivatives of modeling parameters, followed by numerical integration, rather than simulating trajectories and speeds directly, it produces simple and smooth reference curves. All kinematic parameters, including jerks, ensure smoothness, clarity, and continuity between road segments. Second, the proposed technique requires a minimal number of varying parameters. While the cost function encompasses multiple optimization criteria, priority should be given to the accuracy of lateral displacement D and to ensuring motion safety in relation to other traffic participants. Finally, using nonlinear equality constraints, represented by integral numerical techniques, enhances prediction reliability compared with linear equality constraints, with minimal impact on optimization performance.
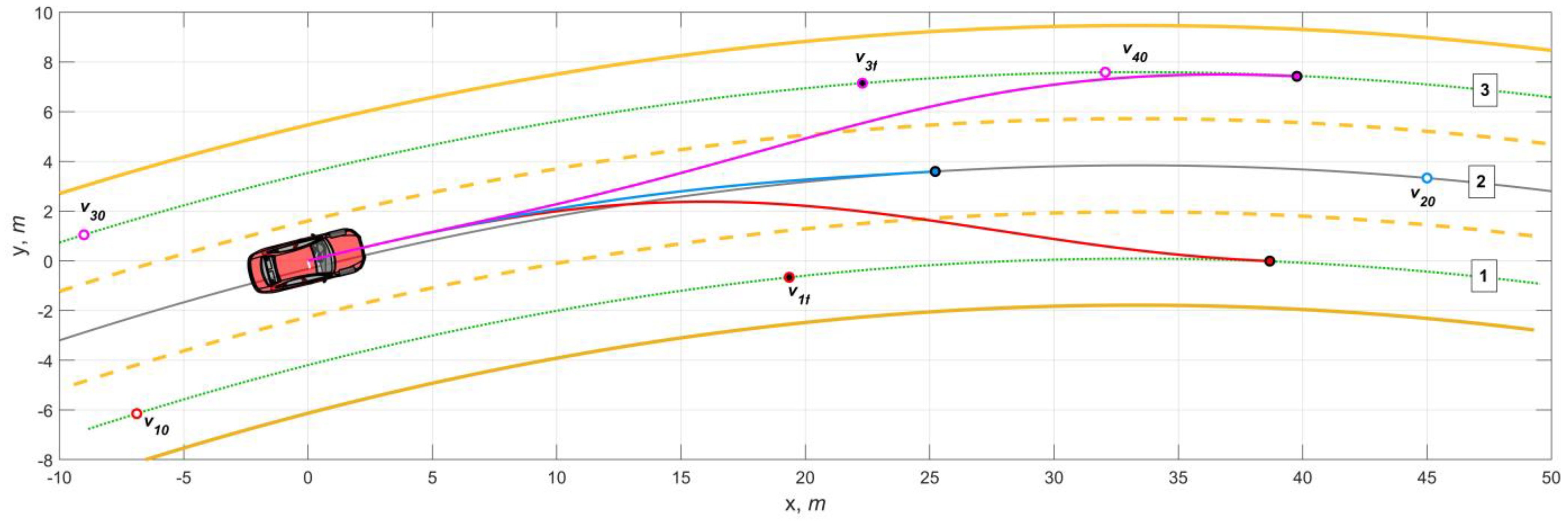
- The vehicle’s position and lane width were established prior to planning the motion, allowing for the generation of several trajectory variants with different lateral displacements (D). In this study, we focused on a minor deviation from the lane’s midline, resulting in the modeling of three maneuver variants. The criteria for selecting the best trajectory may include factors such as minimum transition time, maximum final speed, longest trajectory, minimum control cost, or a combination of these. However, this study did not address the selection of the most effective maneuver, as that topic is reserved for future research.
- All simulations were conducted on a laptop equipped with an 11th Gen Intel® Core™ i7-1185G7 processor (Santa Clara, CA, USA) running at 3.00 GHz (base frequency: 1.80 GHz) and 16.0 GB of RAM, using a 64-bit version of Windows 10 Pro. The software environment utilized was MATLAB R2023b (The MathWorks, Natick, MA, USA), which provided the basic optimization function fmincon. On average, the computation time for one maneuver prognosis ranged from approximately 0.5 to 2.4 s, depending on the optimization settings, desired accuracy, and initial conditions.
- This study addresses a significant gap between theoretical models, such as action-based planners, and practical applications, making it applicable to both urban and highway AV systems. By bridging the integration gap between trajectory planning and speed management, the approach promotes more predictable, comfortable, and physically feasible autonomous motion. As AVs transition from controlled highway environments to complex urban settings, the proposed method—aligning dynamic constraints with real-time performance—is crucial in ensuring safe and passenger-friendly deployment. The inverse technique presented in this paper could establish a foundational tool for the next generation of motion planners.
- While this study advances motion planning with its inverse derivative-based approach, several limitations remain. The method assumes idealized conditions—perfect state estimation, all-wheel-drive dynamics, and simplified circular obstacles—which may degrade performance in real-world noisy environments or with heterogeneous vehicle platforms. Computational efficiency, though improved, could struggle with ultra-long horizons or dense urban scenarios, and the lack of hardware validation leaves open questions about real-world robustness. Future research should prioritize real-time enhancements (e.g., GPU acceleration), robust perception integration (e.g., sensor fusion for dynamic obstacle prediction), and experimental validation (e.g., on-road testing). Extending the framework to multi-agent coordination (e.g., V2X-enabled planning) could further broaden its impact. Addressing these gaps would bridge the divide between theoretical smoothness and deployable autonomy, making the method viable for safety-critical applications. Furthermore, future research should compare the proposed approach with other approaches in the literature using various criteria, including computation speed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xia, T.; Chen, H. A Survey of Autonomous Vehicle Behaviors: Trajectory Planning Algorithms, Sensed Collision Risks, and User Expectations. Sensors 2024, 24, 4808. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, H.; Waslander, S.; Gong, J.; Xiong, G.; Yang, T.; Liu, K. Hybrid Trajectory Planning for Autonomous Driving in Highly Constrained Environments. IEEE Access 2018, 6, 32800–32819. [Google Scholar] [CrossRef]
- Jiang, Y.; Jin, X.; Xiong, Y.; Liu, Z. A Dynamic Motion Planning Framework for Autonomous Driving in Urban Environments. In Proceedings of the 2020 39th Chinese Control Conference, Shenyang, China, 27–29 July 2020; pp. 5429–5435. [Google Scholar] [CrossRef]
- Dang, D.; Gao, F.; Hu, Q. Motion Planning for Autonomous Vehicles Considering Longitudinal and Lateral Dynamics Coupling. Appl. Sci. 2020, 10, 3180. [Google Scholar] [CrossRef]
- Li, G.; Zhang, X.; Guo, H.; Lenzo, B.; Guo, N. Real-Time Optimal Trajectory Planning for Autonomous Driving with Collision Avoidance Using Convex Optimization. Automot. Innov. 2023, 6, 481–491. [Google Scholar] [CrossRef]
- Tang, X.; Li, B.; Du, H. A Study on Dynamic Motion Planning for Autonomous Vehicles Based on Nonlinear Vehicle Model. Sensors 2023, 23, 443. [Google Scholar] [CrossRef]
- Liniger, A.; Gool, L. Safe Motion Planning for Autonomous Driving using an Adversarial Road Model. arXiv 2020. [Google Scholar] [CrossRef]
- Yang, W.; Li, C.; Zhou, Y. A Path Planning Method for Autonomous Vehicles Based on Risk Assessment. World Electr. Veh. J. 2022, 13, 234. [Google Scholar] [CrossRef]
- Hu, Z.; Yang, Z.; Liu, X.; Zhang, W. Radar-based path planning of autonomous surface vehicle with static and dynamic obstacles in a Frenet Frame. J. Navig. 2023, 76, 487–505. [Google Scholar] [CrossRef]
- Jin, X.; Li, Z.; Ikiela, N.V.O.; He, X.; Wang, Z.; Tao, Y.; Lv, H. An Efficient Trajectory Planning Approach for Autonomous Ground Vehicles Using Improved Artificial Potential Field. Symmetry 2024, 16, 106. [Google Scholar] [CrossRef]
- Dong, D.; Ye, H.; Luo, W.; Wen, J.; Huang, D. Collision Avoidance Path Planning and Tracking Control for Autonomous Vehicles Based on Model Predictive Control. Sensors 2024, 24, 5211. [Google Scholar] [CrossRef]
- Jeng, S.-L.; Chieng, W.-H.; Wang, Y.-C. Real-Time Heuristic Motion Planning for Autonomous Vehicle Driving. J. Soc. Mech. Eng. 2021, 42, 187–196. [Google Scholar] [CrossRef]
- Lu, Y.; He, S.; Li, Y.; Wu, Y.; Zhong, W. A real-time decoupling trajectory planning method for on-road autonomous driving. IET Control. Theory Appl. 2022, 17, 1800–1812. [Google Scholar] [CrossRef]
- Cheng, J.; Chen, Y.; Zhang, Q.; Gan, L.; Liu, M. Real-Time Trajectory Planning for Autonomous Driving with Gaussian Process and Incremental Refinement. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 8999–9005. [Google Scholar]
- Jiang, Y.; Liu, Z.; Qian, D.; Zuo, H.; He, W.; Wang, J. Robust Online Path Planning for Autonomous Vehicle Using Sequential Quadratic Programming. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 5–9 June 2022; pp. 175–182. [Google Scholar] [CrossRef]
- Li, B.; Ouyang, Y.; Li, L.; Zhang, Y. Autonomous Driving on Curvy Roads Without Reliance on Frenet Frame: A Cartesian-Based Trajectory Planning Method. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15729–15741. [Google Scholar] [CrossRef]
- Scheffe, P.; Henneken, T.M.; Kloock, M.; Alrifaee, B. Sequential Convex Programming Methods for Real-Time Optimal Trajectory Planning in Autonomous Vehicle Racing. IEEE Trans. Intell. Veh. 2022, 8, 661–672. [Google Scholar] [CrossRef]
- Diachuk, M.; Easa, S.M. Path and control planning for autonomous vehicles in restricted space and low speed. J. Infrastruct. 2020, 5, 42. [Google Scholar] [CrossRef]
- Pérez-Dattari, R.; Brito, B.; de Groot, O.; Kober, J.; Alonso-Mora, J. Visually-guided motion planning for autonomous driving from interactive demonstrations. Eng. Appl. Artif. Intell. 2022, 116, 105277. [Google Scholar] [CrossRef]
- Diachuk, M.; Easa, S.M. Improved mathematical approach for modeling sport differential mechanism. Vehicles 2022, 4, 1122–1157. [Google Scholar] [CrossRef]
- Diachuk, M.; Easa, S.M. Modeling combined operation of engine and torque converter for improved vehicle powertrain’s complex. Vehicles 2022, 4, 433–444. [Google Scholar] [CrossRef]
- Diachuk, M.; Easa, S.M. Improved models of vehicle differential mechanisms using various approaches. Int. J. Veh. Syst. Model. Test. 2023, 17, 210–230. [Google Scholar] [CrossRef]
- Diachuk, M.; Easa, S.M. Motion planning for autonomous vehicles using sequential optimization. Vehicles 2022, 4, 808–824. [Google Scholar] [CrossRef]
- Diachuk, M.; Easa, S.M. Using inverse dynamics technique in planning autonomous vehicle speed mode considering physical constraints. Highlights Veh. 2023, 1, 29–53. [Google Scholar] [CrossRef]
- Dorpmüller, P.; Schmitz, T.; Bejagam, N.; Bertram, T. Time-Optimal Trajectory Planning in Highway Scenarios Using Basis-Spline Parameterization. In Proceedings of the IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bilbao, Spain, 24–28 September 2023; pp. 596–601. [Google Scholar] [CrossRef]
- Wang, Y.; Lin, Z. Research on path planning for autonomous vehicle based on Frenet system. J. Eng. Res. 2023, 11, 100080. [Google Scholar] [CrossRef]
- Trauth, R.; Moller, K.; Würsching, G.; Betz, J. FRENETIX: A High-Performance and Modular Motion Planning Framework for Autonomous Driving. IEEE Access 2024, 12, 127426–127439. [Google Scholar] [CrossRef]
- Huang, H.; Liu, Y.; Liu, J.; Yang, Q.; Wang, J.; Abbink, D.; Zgonnikov, A. General Optimal Trajectory Planning: Enabling Autonomous Vehicles with the Principle of Least Action. Engineering 2023, 33, 63–76. [Google Scholar] [CrossRef]
- Diachuk, M.; Easa, S.M. Planning speed mode of all-wheel drive autonomous vehicles considering complete constraint set. Vehicles 2024, 6, 191–230. [Google Scholar] [CrossRef]
- Diachuk, M.; Easa, S.M. Simultaneous trajectory and speed planning for autonomous vehicles considering maneuver variants. Appl. Sci. 2024, 14, 1579. [Google Scholar] [CrossRef]
- MATLAB R2022b. 2023. Available online: https://www.mathworks.com/ (accessed on 22 January 2023).
- Audi A4 Quatro Characteristics. 2023. Available online: http://www.automobile-catalog.com/car/2011/1187660/audi_a4_3_2_fsi_quattro_attraction_tiptronic.html (accessed on 19 January 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Reference (Date) | Study Focus | Methodology | Context | Strengths | Limitations |
|---|---|---|---|---|---|---|
| Dynamic Motion Planning | Jiang et al. [3] (2020) | Urban motion planning framework | Dynamic optimization | Intersections, urban | Effective in complex environments | Limited to low-speed scenarios |
| Dang et al. [4] (2020) | Motion planning with coupled dynamics | Nonlinear MPC with coupled lateral–longitudinal model | High-speed highways | Better normal driving performance | High computational complexity. Simplified obstacle avoidance | |
| Li et al. [5] (2022) | Cartesian-based planning (non-Frenet) | CC, dynamic constraints | Rural winding roads | Avoids Frenet frame distortions | Less efficient in structured roads | |
| Tang et al. [6] (2023) | Nonlinear vehicle dynamics for motion planning | Nonlinear MPC, dynamic constraints, T-S fuzzy model | Urban highways | High-fidelity vehicle dynamics modeling | Computationally intensive | |
| Obstacle Avoidance | Liniger and Gool [7] (2020) | Adversarial road model for safety | Game theory and H-J = reachability | Highways, multi-vehicles | Enables cooperative planning | Requires V2V infrastructure |
| Yang et al. [8] (2022) | Risk-based path planning | Risk model, graph search, APF | Mixed traffic (urban) | Explicit risk quantification | Conservative dynamic scenarios | |
| Hu et al. [9] (2023) | Radar-based path planning | Frenet frame optimization | Maritime (harbors) | Effective marine navigation | Limited to aquatic environments | |
| Jin et al. [10] (2024) | Improved artificial potential field | APF with local minima avoidance | Off-road, restricted space | Smooth collision avoidance | Prone to local minima | |
| Dong et al. [11] (2024) | MPC-based collision avoidance | Nonlinear MPC, safety constraints | Intersections, urban | Robust collision avoidance | High computational load | |
| Real-Time Planning | Jeng et al. [12] (2021) | Heuristic motion planning | Rule-based heuristic approach | Campuses | Fast computation | Less optimal |
| Lu et al. [13] (2022) | Real-time decoupled trajectory planning | Decoupling method, MPC | Highways (trucks) | Fast computation, handles uncertainty | Simplified dynamics | |
| Cheng et al. [14] (2022) | Real-time planning | GP, incremental refinement | Pedestrian zones | Balances accuracy and efficiency | Sensitive to sensor noise | |
| Jiang et al. [15] (2022) | Robust online path planning | SQO | Construction sites | Handles uncertainties | High computational load | |
| Li et al. [16] (2023) | Real-time optimal planning | CO, collision avoidance | Tight spaces, urban | Guarantees safety | Requires convex constraints | |
| Scheffe et al. [17] (2023) | Real-time trajectory planning for racing | Sequential CO | Race trucks | Handles aggressive maneuvers | Specialized for racing contexts | |
| Modeling and Control | Diachuk and Easa [18] (2020) | Low-speed path planning | Constrained optimization | Parking/warehouses | Effective tight spaces | Limited to low-speed scenarios |
| Pérez-Dattari et al. [19] (2022) | Visually guided planning | Interactive learning | Parking lots | Incorporates human-like planning | Requires extensive training data | |
| Diachuk and Easa [20] (2022) | Powertrain modeling for improved vehicle dynamics | Inverse dynamics, powertrain modeling | Off-road (4 × 4 vehicles) | Integrates vehicle mechanics | Requires detailed powertrain data | |
| Diachuk and Easa [21,22,23,24] (2023) | Speed planning considering physical constraints | Inverse dynamics technique | Autonomous vehicles | Realistic speed profiles | Requires precise vehicle dynamics model | |
| Trajectory Optimization | Dorpmüller et al. [25] (2023) | Time-optimal trajectory planning | B-spline parameterization | Highway (lane change) | Time-efficient smooth trajectories | Assumes ideal vehicle dynamics |
| Wang and Lin [26] (2023) | Frenet-based path planning | Frenet coordinate system | Highway, merging | Simplifies path representation | Over-reliance on reference line | |
| Trauth et al. [27] (2024) | Modular motion planning framework | Frenet-based planning | Highways, urban | High flexibility, real-time performance | Complex implementation | |
| Huang et al. [28] (2024) | Least-action principle for optimal trajectories | Variational optimization, physics-inspired | General roads | Generalizable framework | High computational complexity | |
| Diachuk and Easa [29] (2024) | Simultaneous trajectory–speed planning | Inverse dynamics, GQ, SO | Highways (AWD) | Comprehensive constraint handling | Increased computational load | |
| Present Study (2025) | Simultaneous trajectory-speed planning, optimizing kinematic parameters for smoothness/continuity. | Inverse numerical integration with GQ, SQO with nonlinear constraints. | Highway, urban environments | Ensures jerk continuity, handles kinematic/dynamic constraints. Considers LC and moving obstacles. | Computationally heavy (0.5–2.4 s/maneuver) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Easa, S.M.; Diachuk, M. Inverse Dynamics-Based Motion Planning for Autonomous Vehicles: Simultaneous Trajectory and Speed Optimization with Kinematic Continuity. World Electr. Veh. J. 2025, 16, 272. https://doi.org/10.3390/wevj16050272
Easa SM, Diachuk M. Inverse Dynamics-Based Motion Planning for Autonomous Vehicles: Simultaneous Trajectory and Speed Optimization with Kinematic Continuity. World Electric Vehicle Journal. 2025; 16(5):272. https://doi.org/10.3390/wevj16050272
Chicago/Turabian StyleEasa, Said M., and Maksym Diachuk. 2025. "Inverse Dynamics-Based Motion Planning for Autonomous Vehicles: Simultaneous Trajectory and Speed Optimization with Kinematic Continuity" World Electric Vehicle Journal 16, no. 5: 272. https://doi.org/10.3390/wevj16050272
APA StyleEasa, S. M., & Diachuk, M. (2025). Inverse Dynamics-Based Motion Planning for Autonomous Vehicles: Simultaneous Trajectory and Speed Optimization with Kinematic Continuity. World Electric Vehicle Journal, 16(5), 272. https://doi.org/10.3390/wevj16050272