
Influence of Agisoft Metashape Parameters on UAS Structure from Motion Individual Tree Detection from Canopy Height Models



Abstract
1. Introduction
2. Materials and Methods
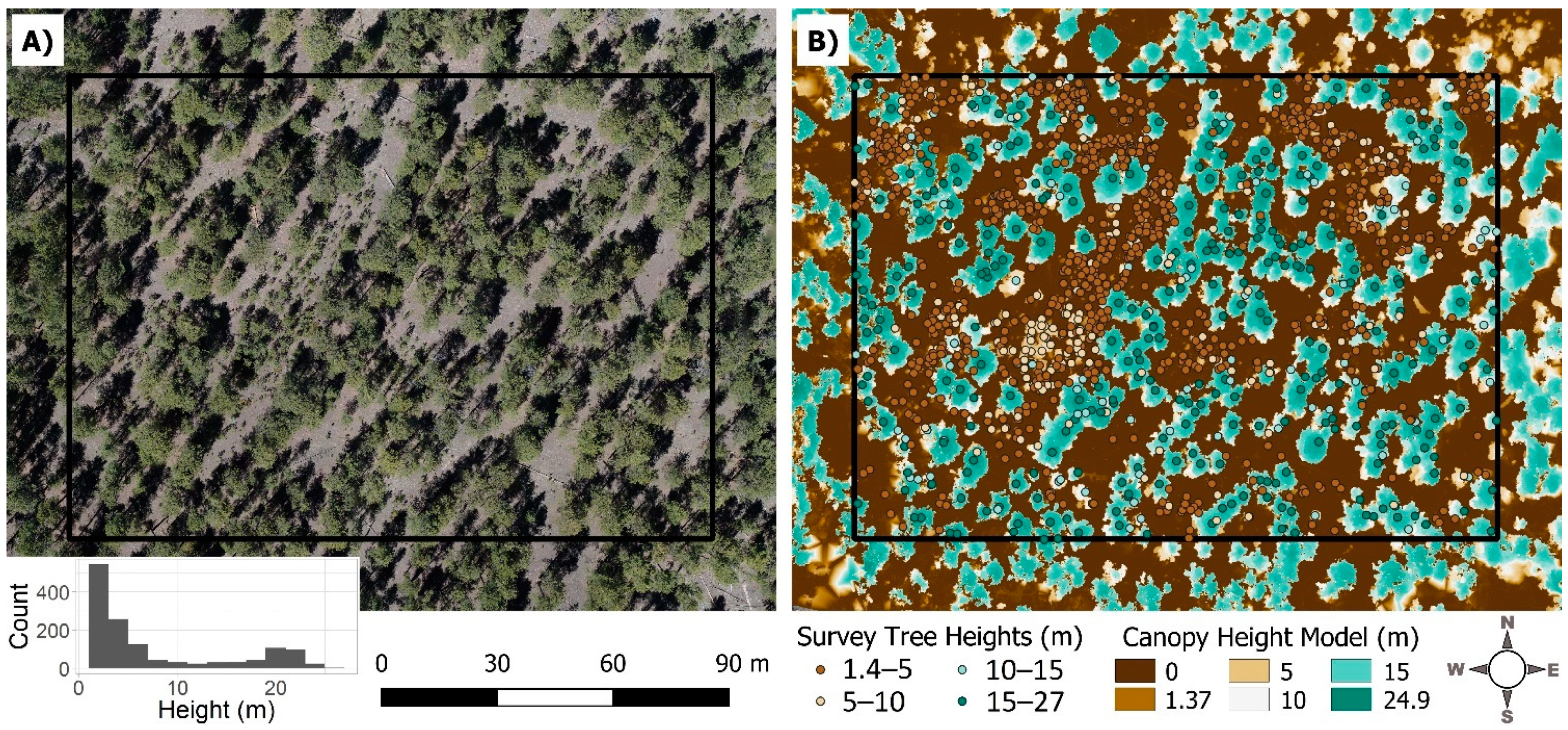
2.1. Study Area
2.2. UAS Data Collection
2.3. UAS Data Processing
2.4. Data Comparison
3. Results
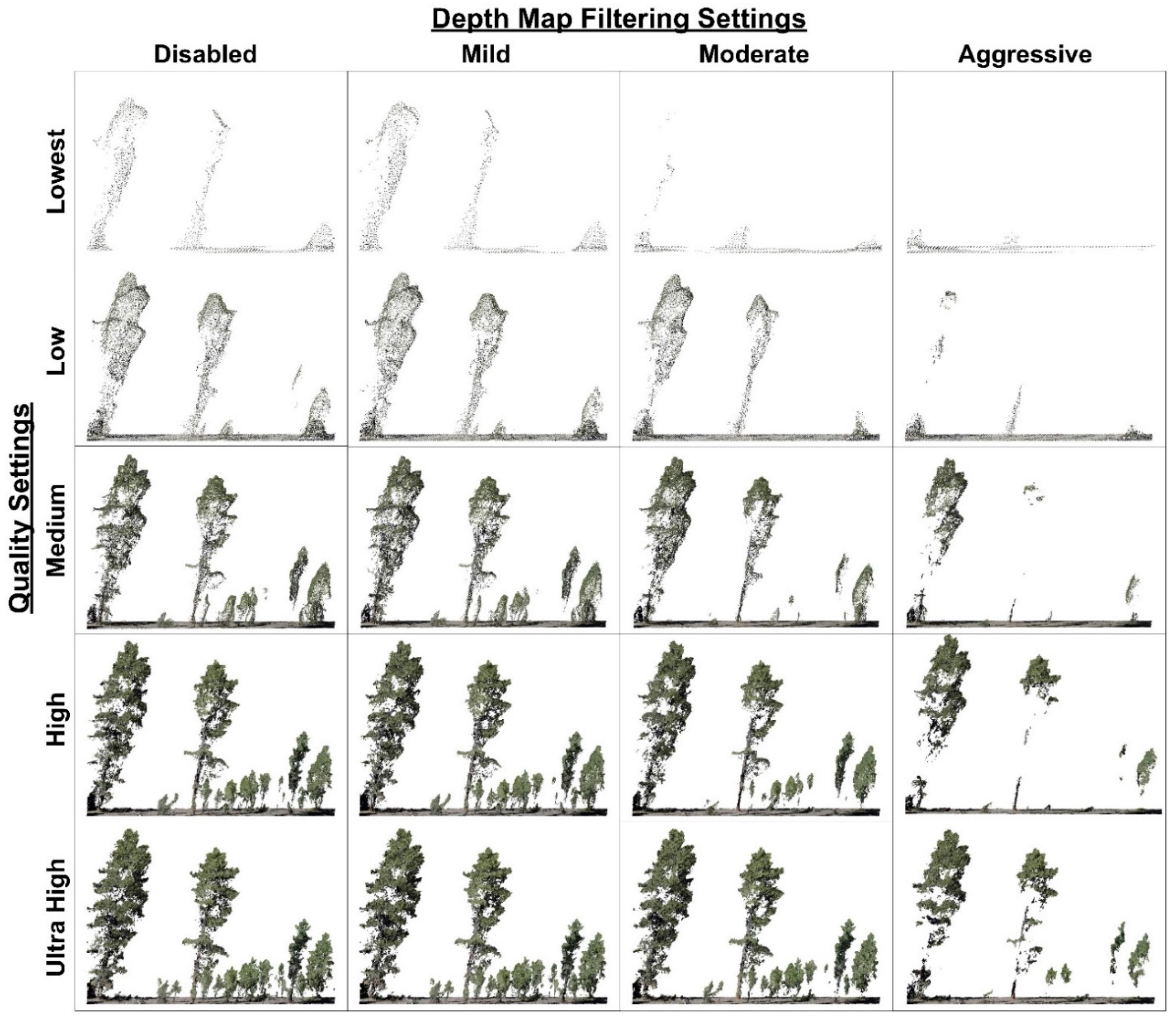
3.1. Point Cloud Comparison
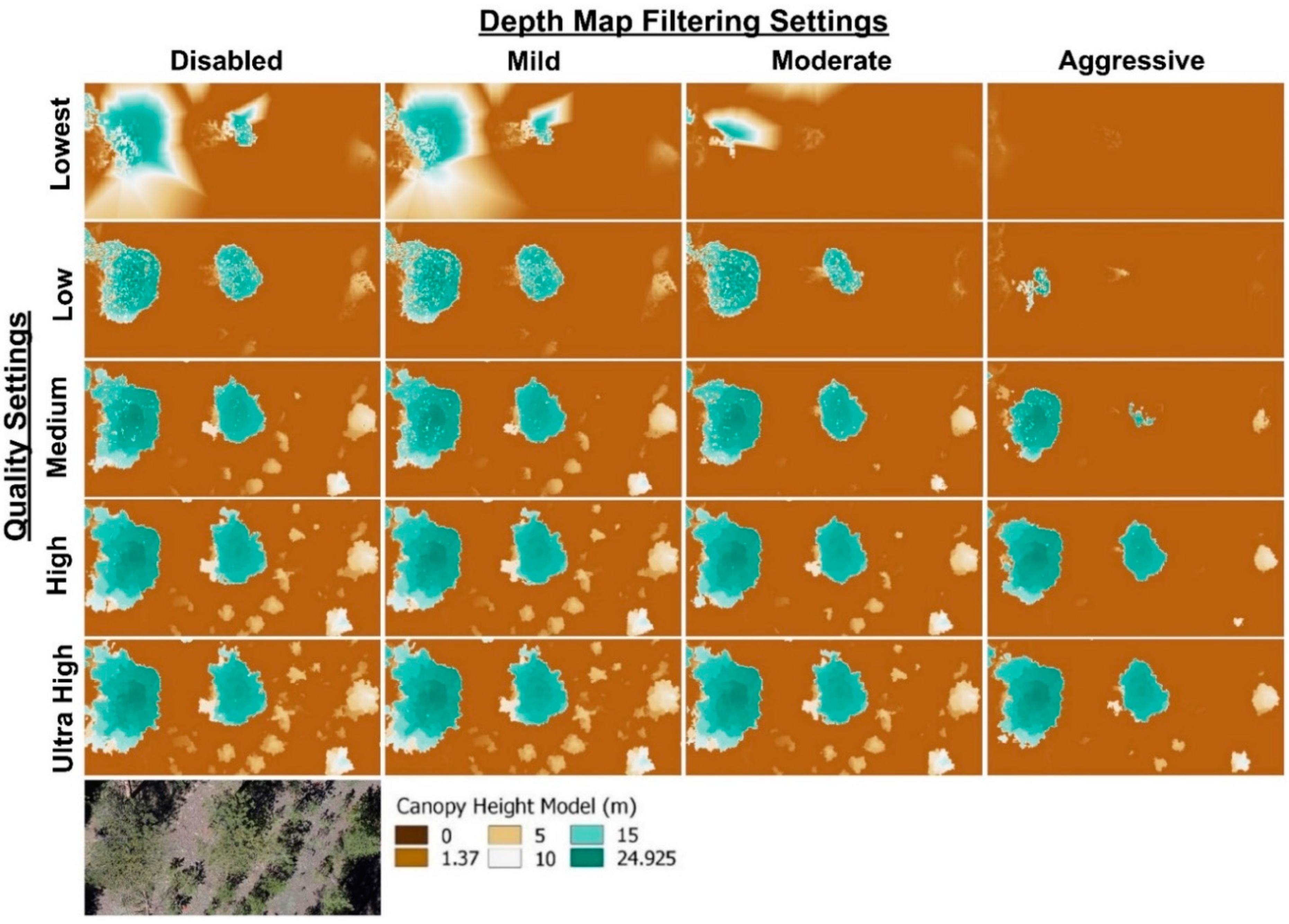
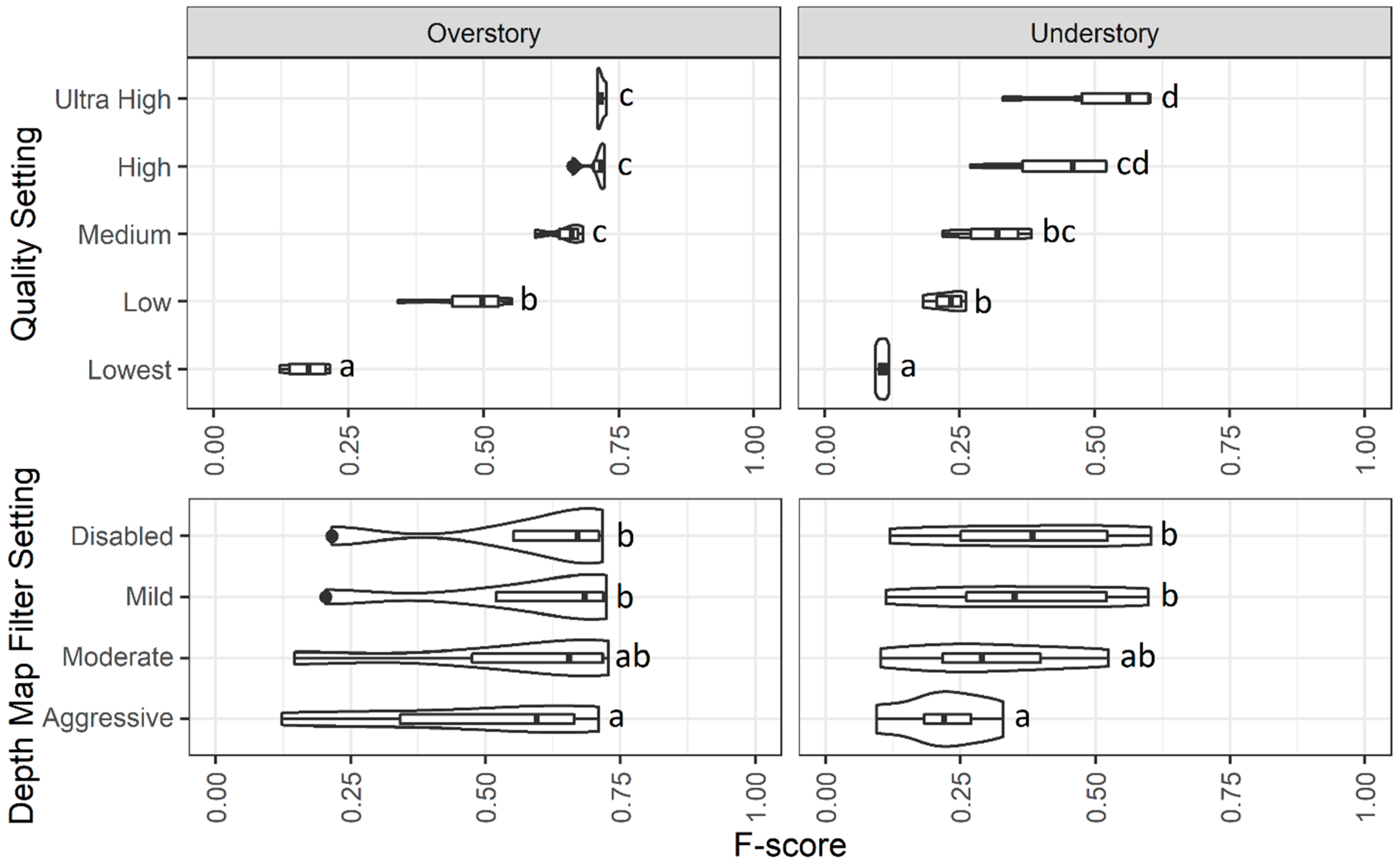
3.2. CHM, Tree Detection, and Height Accuracy Comparison
4. Discussion
4.1. Influence of Processing Parameters
4.2. Implications on Forest Monitoring
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, J.M.; et al. Imputation of Individual Longleaf Pine (Pinus palustris Mill.) Tree Attributes from Field and LiDAR Data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Tinkham, W.T.; Smith, A.M.S.; Hoffman, C.M.; Hudak, A.T.; Falkowski, M.J.; Swanson, M.E.; Gessler, P.E. Investigating the influence of LiDAR ground surface errors on the utility of derived forest inventories. Can. J. For. Res. 2012, 42, 413–422. [Google Scholar] [CrossRef]
- Creasy, M.B.; Tinkham, W.T.; Hoffman, C.M.; Vogeler, J.C. Potential of individual tree monitoring in ponderosa pine-dominated forests using unmanned aerial system structure from motion point clouds. Can. J. For. Res. 2021. [Google Scholar] [CrossRef]
- Belmonte, A.; Sankey, T.; Biederman, J.A.; Bradford, J.; Goetz, S.J.; Kolb, T.; Woolley, T. UAV-derived estimates of forest structure to inform ponderosa pine forest restoration. Remote Sens. Ecol. Conserv. 2020, 6, 181–197. [Google Scholar] [CrossRef]
- Jeronimo, S.M.A.; Kane, V.; Churchill, D.J.; McGaughey, R.; Franklin, J.F. Applying LiDAR Individual Tree Detection to Management of Structurally Diverse Forest Landscapes. J. For. 2018, 116, 336–346. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Smith, A.M.S.; Hudak, A.T.; Gessler, P.E.; Vierling, L.A.; Crookston, N.L. Automated estimation of individual conifer tree height and crown diameter via two-dimensional spatial wavelet analysis of lidar data. Can. J. Remote Sens. 2006, 32, 153–161. [Google Scholar] [CrossRef]
- Sačkov, I.; Kulla, L.; Bucha, T. A Comparison of Two Tree Detection Methods for Estimation of Forest Stand and Ecological Variables from Airborne LiDAR Data in Central European Forests. Remote Sens. 2019, 11, 1431. [Google Scholar] [CrossRef]
- Nilsson, M. Estimation of tree heights and stand volume using an airborne lidar system. Remote Sens. Environ. 1996, 56, 1–7. [Google Scholar] [CrossRef]
- Tinkham, W.T.; Smith, A.M.S.; Affleck, D.L.R.; Saralecos, J.D.; Falkowski, M.J.; Hoffman, C.M.; Hudak, A.T.; Wulder, M.A. Development of height-volume relationships in second growth Abies grandis for use with aerial LiDAR. Can. J. Remote Sens. 2016, 42, 400–410. [Google Scholar] [CrossRef]
- Ziegler, J.P.; Hoffman, C.; Battaglia, M.; Mell, W. Spatially explicit measurements of forest structure and fire behavior following restoration treatments in dry forests. For. Ecol. Manag. 2017, 386, 1–12. [Google Scholar] [CrossRef]
- Dandois, J.; Olano, M.; Ellis, E. Optimal Altitude, Overlap, and Weather Conditions for Computer Vision UAV Estimates of Forest Structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Frey, J.; Kovach, K.; Stemmler, S.; Koch, B. UAV Photogrammetry of Forests as a Vulnerable Process. A Sensitivity Analysis for a Structure from Motion RGB-Image Pipeline. Remote Sens. 2018, 10, 912. [Google Scholar] [CrossRef]
- Nesbit, P.; Hugenholtz, C. Enhancing UAV–SfM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef]
- Fraser, B.T.; Congalton, R.G. Issues in Unmanned Aerial Systems (UAS) Data Collection of Complex Forest Environments. Remote Sens. 2018, 10, 908. [Google Scholar] [CrossRef]
- Przybilla, H.-J.; Lindstaedt, M.; Kersten, T. Investigations into the quality of image-based point clouds from UAV imagery. Int. Arch. Photogramm. Remote Sens. Spatial Infor. Sci. 2019, XLII-2/W13. [Google Scholar] [CrossRef]
- Jayathunga, S.; Owari, T.; Tsuyuki, S. Digital aerial photogrammetry for uneven-aged forest management: Assessing the potential to reconstruct canopy structure and estimate living biomass. Remote Sens. 2019, 11, 338. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Li, Z.; Snavely, N. MegaDepth: Learning single-view depth prediction from internet photos. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 2041–2050. [Google Scholar]
- Hu, X.; Mordohai, P. A quantitative evaluation of confidence measures for stereo vision. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2121–2133. [Google Scholar] [PubMed]
- Carrilho, A.C.; Galo, M.; dos Santos, R.C. Statistical outlier detection method for airborne lidar data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2018, 42, 87–92. [Google Scholar] [CrossRef]
- Vastaranta, M.; Melkas, T.; Holopainen, M.; Kaartinen, H.; Hyyppä, J.; Hyyppä, H. Laser-based field measurements in tree-level forest data acquisition. Photogramm. J. Finl. 2009, 21, 51–61. [Google Scholar]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is field-measured tree height as reliable as believed–a comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in boreal forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Roussel, J.R.; Auty, D. lidR: Airborne LiDAR Data Manipulation and Visualization for Forestry Applications. R Package Version 2.0.2. 2019. Available online: https://CRAN.R-project.org/package=lidR (accessed on 12 March 2020).
- Popescu, S.C.; Wynne, R.H. Seeing the Trees in the Forest. Photogramm. Eng. Remote Sens. 2004, 70, 589–604. [Google Scholar] [CrossRef]
- Plowright, A. ForestTools: Analyzing Remotely Sensed Forest Data. R Package Version 0.2.0. 2018. Available online: https://CRAN.R-project.org/package=ForestTools (accessed on 12 March 2020).
- Krause, S.; Sanders, T.G.; Mund, J.-P.; Greve, K. UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef]
- Swayze, N.C.; Tinkham, W.T.; Vogeler, J.C.; Hudak, A.T. Influence of flight parameters on UAS-based monitoring of tree height, diameter, and density. Remote Sens. Environ. 2021, 258, 1–23. [Google Scholar]
- Fawcett, D.; Azlan, B.; Hill, T.C.; Kho, L.K.; Bennie, J.; Anderson, K. Unmanned aerial vehicle (UAV) derived structure-from-motion photogrammetry point clouds for oil palm (Elaeis guineensis) canopy segmentation and height estimation. Int. J. Remote Sens. 2019, 40, 7538–7560. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.J.; Faias, S.P.; Tomé, M.; Díaz-Varela, R.A. Use of multi-temporal UAV-derived imagery for estimating individual tree growth in Pinus pinea stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Setting |
|---|---|
| Align Photos | |
| Accuracy | High |
| Generic Preselection | Yes |
| Reference Preselection | Source |
| Reset Current Alignment | No |
| Key Point Limit | 40,000 |
| Tie Point Limit | 4000 |
| Apply Masks To | None |
| Optimize Alignment | |
| Adaptive Camera Model Fitting | Yes |
| # of Point Clouds | Overall (Points m−2) | Ground (Points m−2) | Processing Time (h ha−1) | File Size (GB ha−1) | |
|---|---|---|---|---|---|
| Quality Setting | |||||
| Ultra High | 4 | 6041.1 (534.8) c | 10.9 (0.4) cd | 1.49 (0.04) d | 0.856 (0.087) c |
| High | 4 | 1364.6 (105.7) b | 11.1 (0.3) d | 0.37 (0.01) c | 0.201 (0.019) b |
| Medium | 4 | 327.4 (23.9) a | 10.5 (0.2) c | 0.11 (0.00) b | 0.048 (0.004) a |
| Low | 4 | 80.1 (7.6) a | 8.8 (0.1) b | 0.04 (0.00) a | 0.012 (0.001) a |
| Lowest | 4 | 18.7 (1.7) a | 1.4 (0.2) a | 0.03 (0.00) a | 0.002 (0.0002) a |
| Depth Map Filter Setting | |||||
| Aggressive | 5 | 1365.0 (2218.7) | 8.6 (4.3) | 0.41 (0.63) | 0.191 (0.307) |
| Moderate | 5 | 1634.3 (2687.9) | 8.6 (4.2) | 0.42 (0.64) | 0.233 (0.380) |
| Mild | 5 | 1.628.8 (2654.5) | 8.6 (4.1) | 0.39 (0.60) | 0.233 (0.376) |
| Disabled | 5 | 1637.4 (2376.7) | 8.3 (3.8) | 0.40 (0.62) | 0.238 (0.386) |
| # of Point Clouds | F-Score | True Positive (%) | Omission (%) | Commission (%) | Height Mean Error (m) | Height RMSE (%) | |
|---|---|---|---|---|---|---|---|
| Quality Setting | |||||||
| Ultra High | 4 | 0.717 (0.008) c | 65.8 (1.8) c | 34.2 (1.8) c | 17.8 (2.7) d | −0.49 (0.02) b | 5.0 (0.2) d |
| High | 4 | 0.706 (0.028) c | 65.2 (3.6) c | 34.8 (3.6) c | 19.4 (0.8) d | −0.60 (0.05) b | 5.6 (0.1) c |
| Medium | 4 | 0.651 (0.039) c | 61.8 (5.5) c | 38.2 (5.5) c | 27.8 (1.6) c | −0.76 (0.04) a | 6.6 (0.2) b |
| Low | 4 | 0.472 (0.093) b | 42.6 (10.0) b | 57.4 (10.0) b | 36.5 (2.1) b | −0.85 (0.05) a | 7.1 (0.3) ab |
| Lowest | 4 | 0.172 (0.045) a | 14.1 (04.1) a | 85.9 (4.1) a | 49.3 (2.0) a | −0.83 (0.09) a | 7.5 (0.4) a |
| Depth Map Filter Setting | |||||||
| Disabled | 5 | 0.573 (0.211) b | 53.6 (20.8) b | 46.4 (20.8) b | 31.1 (13.1) | −0.68 (0.16) | 6.2 (1.0) |
| Mild | 5 | 0.570 (0.221) b | 53.1 (21.9) b | 46.9 (21.9) b | 30.2 (12.4) | −0.71 (0.18) | 6.3 (1.1) |
| Moderate | 5 | 0.544 (0.244) ab | 49.8 (23.3) b | 50.2 (23.3) b | 29.7 (13.9) | −0.69 (0.14) | 6.5 (1.0) |
| Aggressive | 5 | 0.487 (0.248) a | 43.0 (23.1) a | 57.0 (23.1) a | 29.6 (13.2) | −0.74 (0.16) | 6.5 (1.1) |
| # of Point Clouds | F-Score | True Positive (%) | Omission (%) | Commission (%) | Height Mean Error (m) | Height RMSE (%) | |
|---|---|---|---|---|---|---|---|
| Quality Setting | |||||||
| Ultra High | 4 | 0.514 (0.128) d | 40.8 (13.1) d | 59.2 (13.1) d | 15.3 (3.7) | −0.14 (0.02) | 23.5 (1.5) b |
| High | 4 | 0.428 (0.120) cd | 31.4 (10.4) cd | 68.6 (10.4) cd | 13.7 (3.9) | −0.15 (0.06) | 24.1 (1.8) b |
| Medium | 4 | 0.310 (0.072) bc | 20.9 (5.0) bc | 79.1 (5.0) bc | 13.9 (5.5) | −0.19 (0.06) | 26.4 (1.7) b |
| Low | 4 | 0.228 (0.036) b | 15.1 (2.3) ab | 84.9 (2.3) ab | 17.7 (3.5) | −0.18 (0.05) | 28.2 (0.4) b |
| Lowest | 4 | 0.107 (0.011) a | 6.6 (0.6) a | 93.4 (0.6) a | 17.5 (2.6) | −0.03 (0.12) | 33.3 (4.4) a |
| Depth Map Filter Setting | |||||||
| Disabled | 5 | 0.376 (0.197) b | 28.6 (17.9) b | 71.4 (17.9) b | 15.8 (3.0) ab | −0.14 (0.05) | 27.3 (3.6) |
| Mild | 5 | 0.368 (0.196) b | 27.1 (16.9) b | 72.9 (16.9) b | 13.0 (2.8) b | −0.12 (0.02) | 25.8 (2.0) |
| Moderate | 5 | 0.306 (0.163) ab | 21.3 (12.7) ab | 78.7 (12.7) ab | 13.8 (3.4) b | −0.17 (0.09) | 26.7 (5.0) |
| Aggressive | 5 | 0.219 (0.089) a | 14.9 (6.4) a | 85.1 (6.4) a | 20.0 (2.8) a | −0.12 (0.15) | 28.7 (5.9) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tinkham, W.T.; Swayze, N.C. Influence of Agisoft Metashape Parameters on UAS Structure from Motion Individual Tree Detection from Canopy Height Models. Forests 2021, 12, 250. https://doi.org/10.3390/f12020250
Tinkham WT, Swayze NC. Influence of Agisoft Metashape Parameters on UAS Structure from Motion Individual Tree Detection from Canopy Height Models. Forests. 2021; 12(2):250. https://doi.org/10.3390/f12020250
Chicago/Turabian StyleTinkham, Wade T., and Neal C. Swayze. 2021. "Influence of Agisoft Metashape Parameters on UAS Structure from Motion Individual Tree Detection from Canopy Height Models" Forests 12, no. 2: 250. https://doi.org/10.3390/f12020250
APA StyleTinkham, W. T., & Swayze, N. C. (2021). Influence of Agisoft Metashape Parameters on UAS Structure from Motion Individual Tree Detection from Canopy Height Models. Forests, 12(2), 250. https://doi.org/10.3390/f12020250