1. Introduction
Wind turbines, having mechanical and electrical components, are known to operate in at least two time-scales: the slow time scale in which mechanical state variables evolve and the fast time scale in which electrical and electronic state variables evolve. The result is the “stiff” numerical problem that happens naturally in power systems due to the presence of “parasitic” parameters such as small time constants, masses, resistances, inductances, capacitances, moments of inertia, etc. Singular perturbation methods eliminate the stiffness problem and decouple the original system into slow and fast reduced-order subsystems. A reduced-order system can be obtained through ignoring the fast subsystem and compensating for its effect by introducing a “boundary layer” correction to the slow subsystem towards a better approximation for the original system. Various methods have been proposed [
1,
2] to obtain the exact slow and fast subsystems. The Chang transformation [
3] has been widely used to get the exact pure-slow and pure-fast subsystems, even when the perturbation parameter
is not very small. Moreover, a number of recursive algorithms [
4,
5,
6] have been developed to avoid the problems involving ill-conditioned systems and to obtain an approximate solution to the algebraic Riccati equation (ARE), which can be decomposed after that into slow and fast parts.
Double-Fed Induction Generators (DFIGs) are characterized by consuming less reactive power, inflicting less mechanical stress on turbines, and allowing the control of the active and reactive power to be decoupled. As such, DFIGs are commonly used in variable-speed wind energy systems [
7]. However, due to their poorly damped eigenvalues, modeling and control of DFIG-based wind systems is more complicated than that of other induction generators. This is further exacerbated by the sensitivity of DFIGs to grid disturbances, which may, under certain operating conditions, render the system unstable [
8].
Time scale analysis and optimal control of wind energy systems have been widely explored [
9,
10,
11,
12,
13,
14]. Using time scale analysis, in [
9] the linear quadratic regulator (LQR) and LQG controllers were designed for deterministic and stochastic wind energy systems with permanent magnet synchronous generators (PMSG). In [
10], the LQR controller was designed for a DFIG wind turbine and compared to current-mode control under different types of disturbances affecting the wind turbine system. The LQR controller is used in [
11] for the pitch angle control, and in [
12] to control the oscillatory behavior towards improving the stability, of the DFIG connected to the grid. In comparison to the balanced reduction methods in [
13], time scale and singular perturbation analysis provide better results in reducing the order of the DFIG-based WT system. A LQG-based power oscillation damping controller is designed in [
14] to provide the supplementary reference signals for the active and reactive power of the DFIG wind generator and to enhance the damping of poorly damped modes.
In this paper, the method of singular perturbation will be used to design LQR, Kalman filter, and LQG optimal controllers in two independent time scales for a fifth-order single-cage DFIG wind turbine. Here, the ARE of the singularly perturbed wind turbine system is decomposed into two reduced-order AREs that correspond to the slow and fast time scales. Using this method allows designing linear controllers for the slow and fast subsystems independently, thus, achieving complete separation and parallelism in the design process. The advantages of such an approach are alleviating stiffness difficulties and reducing computational complexities and dimensionality burdens resulting from the increased penetration of wind turbines to the power grid.
The rest of this paper is organized as follows. In the next section, the wind turbine and DFIG dynamics are reviewed and the state space model of the fifth-order single-cage DFIG wind turbine is presented.
Section 3 reviews the exact decomposition method of the ARE. The optimal performance-invariance of the LQR under similarity transformation is considered in
Section 3.1. In
Section 3.2, the slow and fast decomposition of the optimal performance criteria is provided. The Kalman filtering time scale analysis is reviewed in
Section 4. The effect of similarity transformation on the optimal performance of the Kalman filter is derived in
Section 4. In
Section 5, Optimal LQG Control is discussed. The performance index of the LQG under the similarity transformation and LQG slow and fast optimal performance criteria are derived in
Section 5.1 and
Section 5.2, respectively. Simulation results are presented in
Section 6. The paper is concluded in
Section 7.
2. Modeling Wind Turbine with Double-Fed Induction Generator
The mechanical power collected from the wind can be formulated as:
where
is the air density [Kg/m
],
R is the radius of the turbine in [m],
v is the wind speed [m/s],
is the power coefficient of the wind turbine that describes the efficiency of power extraction.
is a nonlinear function that depends on the blade pitch angle
and the tip speed ratio
, which is given by
where
is the rotor angular velocity.
is a measure for power performance of the wind turbine. Using the turbine characteristics, the latter can be approximated as:
where
can be calculated approximately as follows
The coefficients
, depend on the turbine design characteristics and are given in
Appendix A.2. The maximum mechanical power
collected by the wind turbine is
which requires maintaining
at its optimum value
and the pitch angle at
.
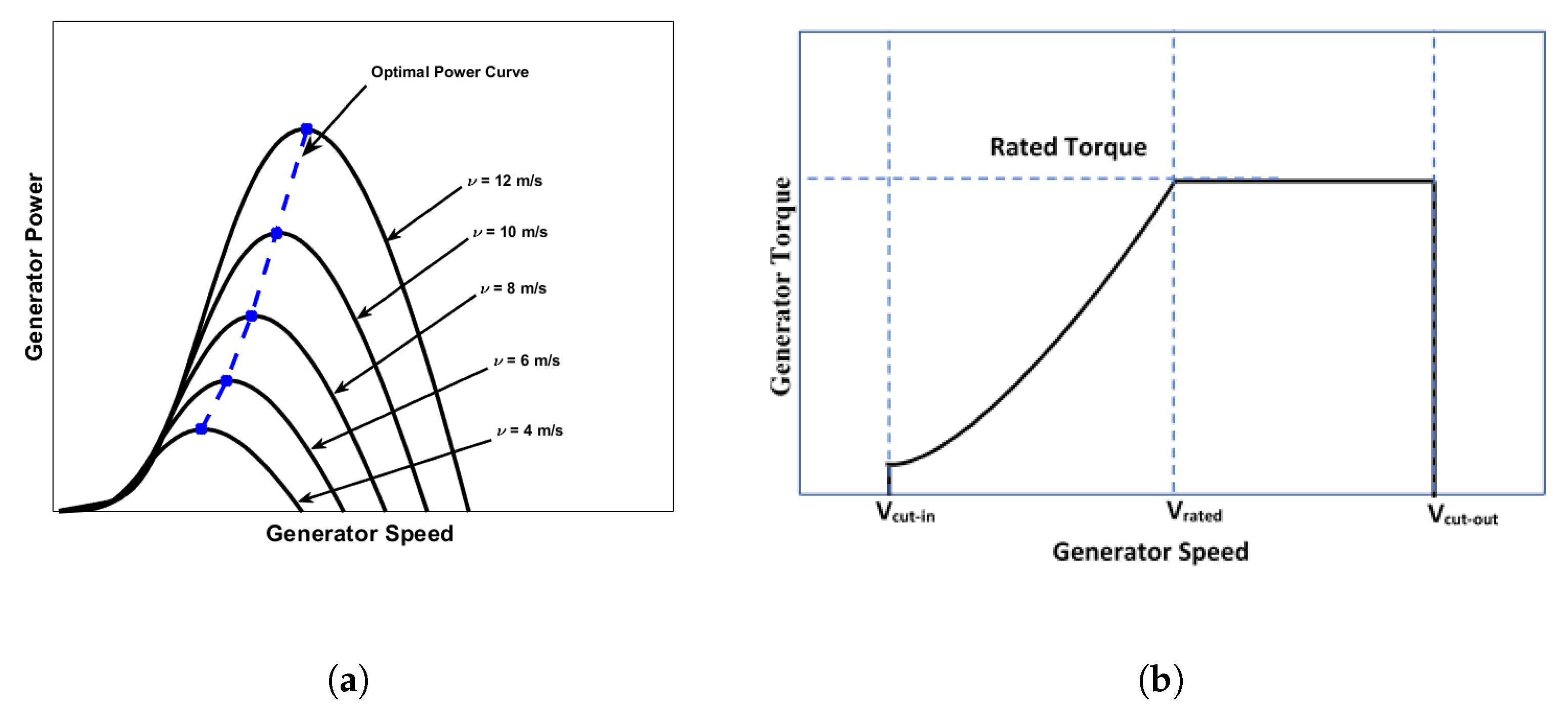
Figure 1 shows a typical wind turbine characteristics with the optimal power extraction
. As the wind speed varies, the controller plays the role of ensuring that the wind turbine follows the optimal power curve in
Figure 1a.
A wind turbine converts the mechanical power of the wind rotating the blades of the turbine into electrical power. In this paper, the one-mass derive train model is considered in which the total inertia
is the sum of the turbine rotor and generator inertias. The dynamics of this model can be formulated as the differential equation:
where
is the mechanical torque and
is the electromechanical torques.
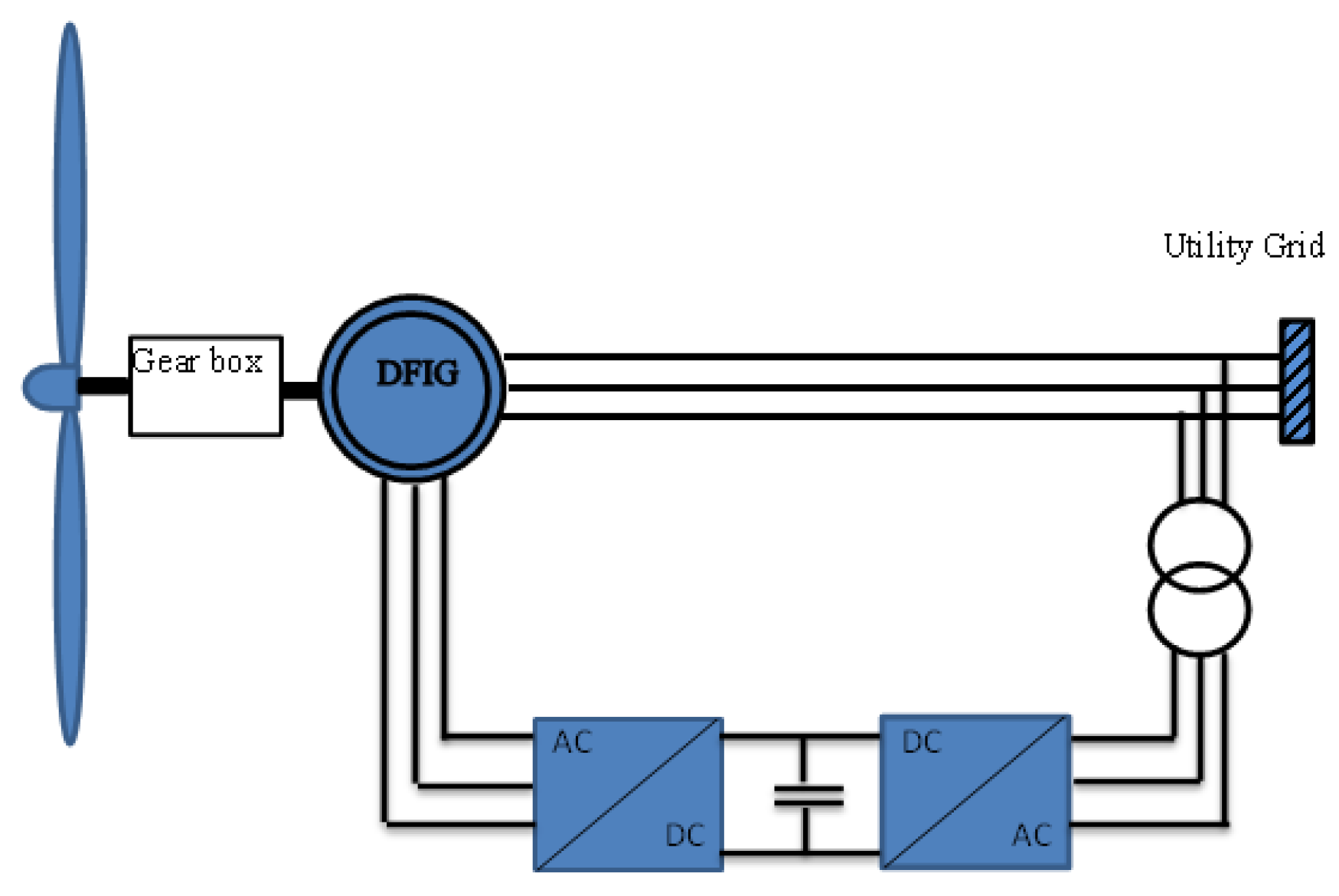
A typical configuration of a utility grid involving a DFIG is shown in
Figure 2. For a simplified mathematical model, all equations of the induction generator are derived using the direct-quadrature (
d-q) transformation. The stator and rotor voltage equations in
d-q synchronous reference frame are given, respectively by:
where the subscripts
s and
r denote the stator and rotor quantities while subscripts
q and
d denote the components aligned with the
q-axis and
d-axis reference frames, respectively. In (
7) and (
8),
and
are the stator and rotor resistances, respectively, and
and
are synchronous and base angular frequencies, respectively.
s is defined as the slip of the generator and given by
. The corresponding magnetic flux equations are given by:
where
,
, and
are stator, rotor, and self magnetizing reactances, respectively.
and
are defined by the following equations:
In [
15,
16] a synchronous reference frame was considered to derive the mathematical model. The following assumptions were imposed: (a) The stator current is assumed to be negative when flowing toward the machine; (b)
q-axis is
ahead of the
d-axis with respect to the direction of rotation. In this paper, the current model of a single-cage DFIG wind turbine reported in [
15,
16] is considered. The general linearized state-space current model is given by:
where
and
D represent the system state, input, output, and feed forward matrices, respectively. The state-space variables, inputs and outputs of the fifth-order single-cage DFIG wind turbine can be described by the following vectors:
where the state variables
x are the rotor and stator currents, the control signals
u are the input voltages and the outputs of the system
y are the rotor currents in the d-axis and q-axis, respectively. In terms of state variables, the electromechanical torque can be formulated as:
using (
6) and (
14) we get
The state-space model of the fifth-order single-cage DFIG wind turbine is obtained by integrating Equations (
12)–(
15). The new state variables, control signal and outputs are given as follows:
The linearized system, control and output matrices
A,
B, and
C, evaluated at the system’s operating points, are characterized by [
10,
15,
16]:
where
,
,
,
,
,
,
,
,
,
,
.
3. Exact Decomposition of the Algebraic Riccati Equation
Consider the linear singularly perturbed control system:
where
,
,
are the state variables and control variables, respectively.
is a small positive singular perturbation parameter that indicates system separation into slow and fast time scales. We assume that the singularly perturbed system (
19) has the standard singular perturbation form [
1]. Hence, the fast subsystem matrix
is nonsingular, which is a standard assumption in the singular perturbation theory [
1]. The corresponding linear-quadratic optimal control problem of (
19) is defined by:
where the control vector
, has to be chosen such that the following performance criterion,
J, is minimized
where
and
are the weighting matrices. The optimizing performance criterion (
21) of the closed-loop optimal control problem, subject to the singularly perturbed system differential Equation (
20), has the solution
where
is the positive semidefinite solution of the regulator algebraic Riccati equation given by [
17]
with
The optimal regulator gains
and
are given by
The solution of the algebraic Riccati Equation (
23) will be found in term of solutions of the reduced-order, pure-slow and pure-fast algebraic Riccati equation. For this purpose, a nonsingular transformation
[
18,
19] is applied for the state-costate equations such that they become completely decoupled as independent slow and fast subsystems in the form
where
and
are the unique solutions of the exact pure-slow and exact pure-fast completely decoupled algebraic regulator Riccati equations
Matrices
, can be found in [
18,
19]. The nonsingular transformation
is given by:
The slow and fast subsystems in the new coordinate are related by:
Even more, the global solution
can be obtained from the reduced-order exact pure-slow and pure-fast algebraic Riccati equations, that is
Known matrices
,
, and
,
are given in terms of solutions of the Chang decoupling equations [
18,
19].
3.1. Optimal Performance Invariance to Similarity Transformation
It has been shown in [
20] that similarity transformation preserves the optimal performance criteria for the linear quadratic regulator LQR, such that its optimal values in the two coordinate systems are equivalent. This results can be derived briefly as follows:
The similarity transformation for the linear quadratic optimal control problem can be derived as follows:
Multiplying by
from the left and by
T from the right we get
define
,
, then
3.2. Slow and Fast Decomposition of the Optimal Performance Criteria
In this section, we calculate the minimized optimal performance
for the slow and fast subsystems of the LQR problem. As stated in the previous section, using the nonsingular transformation defined in (
28) does not change the value of the optimal performance. Therefore, by adding the slow and fast performance indices, we get the total optimal performance
obtained in the original coordinates. The quadratic performance criterion to be minimized, calculated in the new coordinates, is given by:
Formula (
47) constitutes an exact decomposition for the optimal performance criterion into slow and fast components. It can be concluded from (
47) that the contribution the slow subsystem makes to the performance criterion is
, whereas that the fast subsystem makes is only
. Note also that
can be negative since
is generally not a square matrix, and in the case it is, it would still be indefinite.
4. Kalman Filtering Time Scale Analysis
In this section, an optimal Kalman filter is designed to estimate the state variables of the wind energy systems with DFIG. Using the duality property between the optimal filter and regulator, the same decomposition method presented in previous section can be applied here so that the optimal Kalman filter is completely decoupled into the pure-slow and pure-fast local filters both driven by the system measurements [
17]. Consider the linear continuous-time invariant singularly perturbed stochastic system
with the performance criterion
where
, and
, are slow and fast state variables, respectively.
is the control input,
are system measurements.
and
are zero-mean stationary, white Gaussian noise stochastic process with intensities
and
, respectively.
, is the controlled system output given by:
All matrices are of appropriate dimensions and assumed to be constant. The optimal control law for (
52) with the performance criterion (
53) is given by:
where
and
are the optimal estimates of the state vectors
and
obtained from the Kalman filter
The optimal global Kalman filter (
56) can be put in the form in which the filter is driven by the system measurements and optimal control inputs, that is
where the optimal filter gains
and
are obtained from
matrices
,
and
define the positive semidefinite stabilizing solution of the filter algebraic Riccati equation
where
Using duality, the following matrices have to be formed (see [
18,
19])
The partitions and scaling have to be used here,
and
. Since matrices
,
,
, and
correspond to the system matrices of a singularly perturbed linear system, the slow-fast decomposition is achieved by using the Chang decoupling equations
Using the following permutation matrices,
we can define
Then, the desired transformation is given by:
where
is the solution of the ARE (
59).
M and
N are the solution of the Chang decoupling algebraic Equations (
62). The transformation
is applied to the filter variables as:
5. Optimal Linear-Quadratic Gaussian Control
In order to obtain the solution of the linear-quadratic Gaussian LQG control problem of a singularly perturbed DFIG wind turbine system, it is necessary to obtain gain matrices of the the optimal LQR and Kalman filters. In this section, the results of
Section 3 and
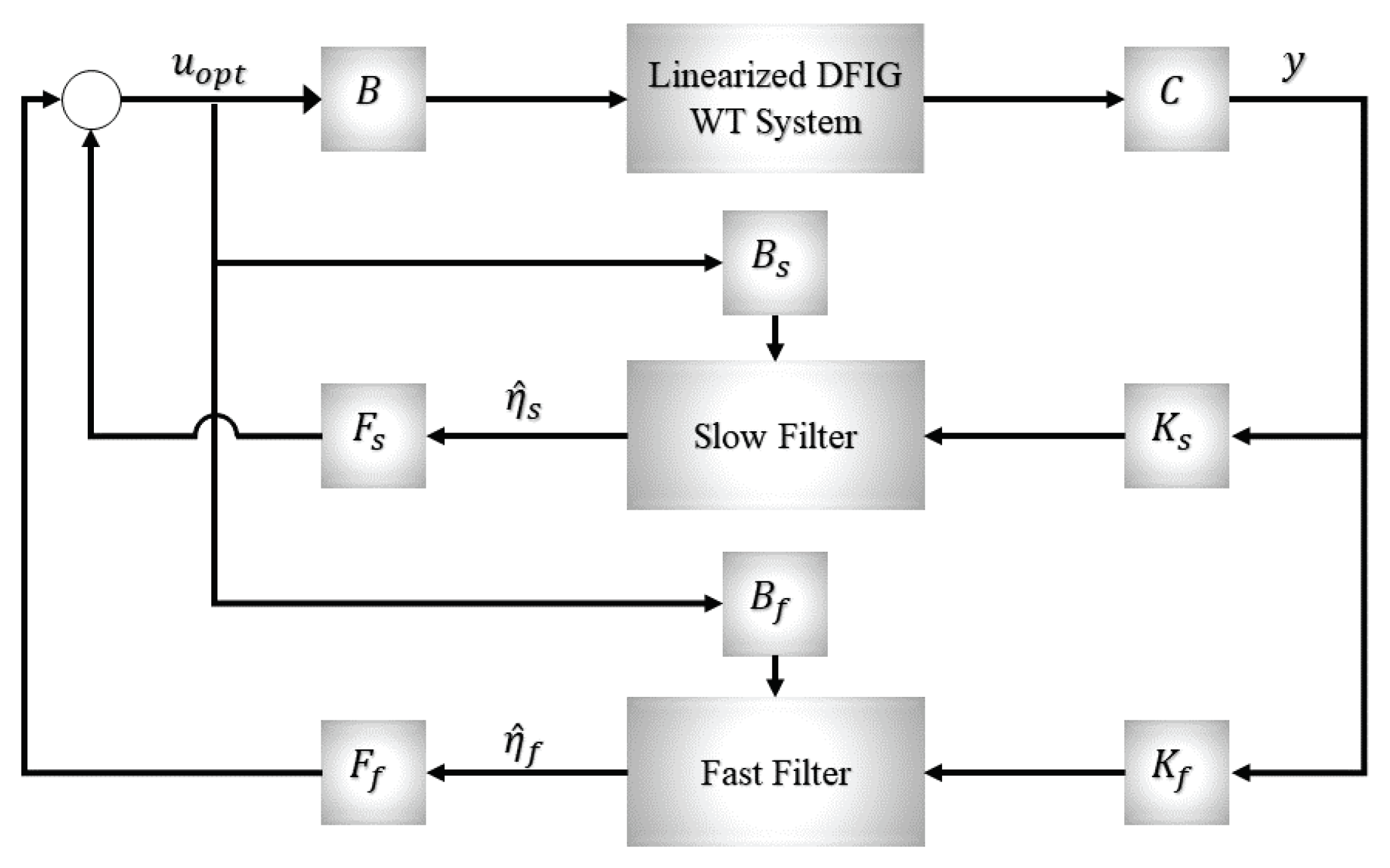
Section 4 are utilized by solving the pure-slow and pure-fast, reduced-order AREs and by implementing the pure-slow and pure-fast, reduced-order Kalman filters. Using the separation principle for linear stochastic control, an optimal LQG controller can be designed for slow and fast subsystems independently, thus, achieving complete separation and parallelism in the design process. The structure of a LQG controller with a decoupled slow and fast subsystems of the LQR and Kalman filter is shown in
Figure 3. The decoupled pure-slow and pure-fast local Kalman filters driven by system measurements and system control inputs are given by:
where
and
are the solutions of the following AREs
The pure-slow and pure-fast filter gains,
,
are defined by
and the remaining matrices are given by:
In addition, the pure-slow and pure-fast system input matrices are
The feedback control in the new coordinates is given:
where
and
are obtained from:
5.1. LQG under Similarity Transformation
The optimal performance index
of the LQG follows from the known formula
Under the similarity transformation, the performance criteria can be derived as follows. Starting with the second line of (
82)
where
,
,
Similarly, for the first line in (
82), we have
where
,
Hence, the similarity transformation does not preserve the optimal performance criteria of the LQG.
5.2. LQG Slow Fast Optimal Performance Criteria
Based on the method proposed in [
19], the optimal performance index for the slow and fast subsytems of the LQG controller can be obtained separately as follows:
where
The formula for the optimal performance criterion (
97) exactly decomposes the optimal performance criteria of the LQG controller into slow and fast components and it shows that in the optimal LQG, the performance criterion is dominated by the fast subsystem.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}