
An Efficient Self-Organized Detection System for Algae


Abstract
1. Introduction
- An algal self-organized detection system is established, which not only guarantees the good detection results, but also realizes the rapid detection of algae;
- An interactive method for generating an algal detection dataset is proposed;
- The detection performance of 10 different versions of state-of-the-art object detection algorithms is compared on the algal detection dataset.
2. Related Works
3. Material and Methods
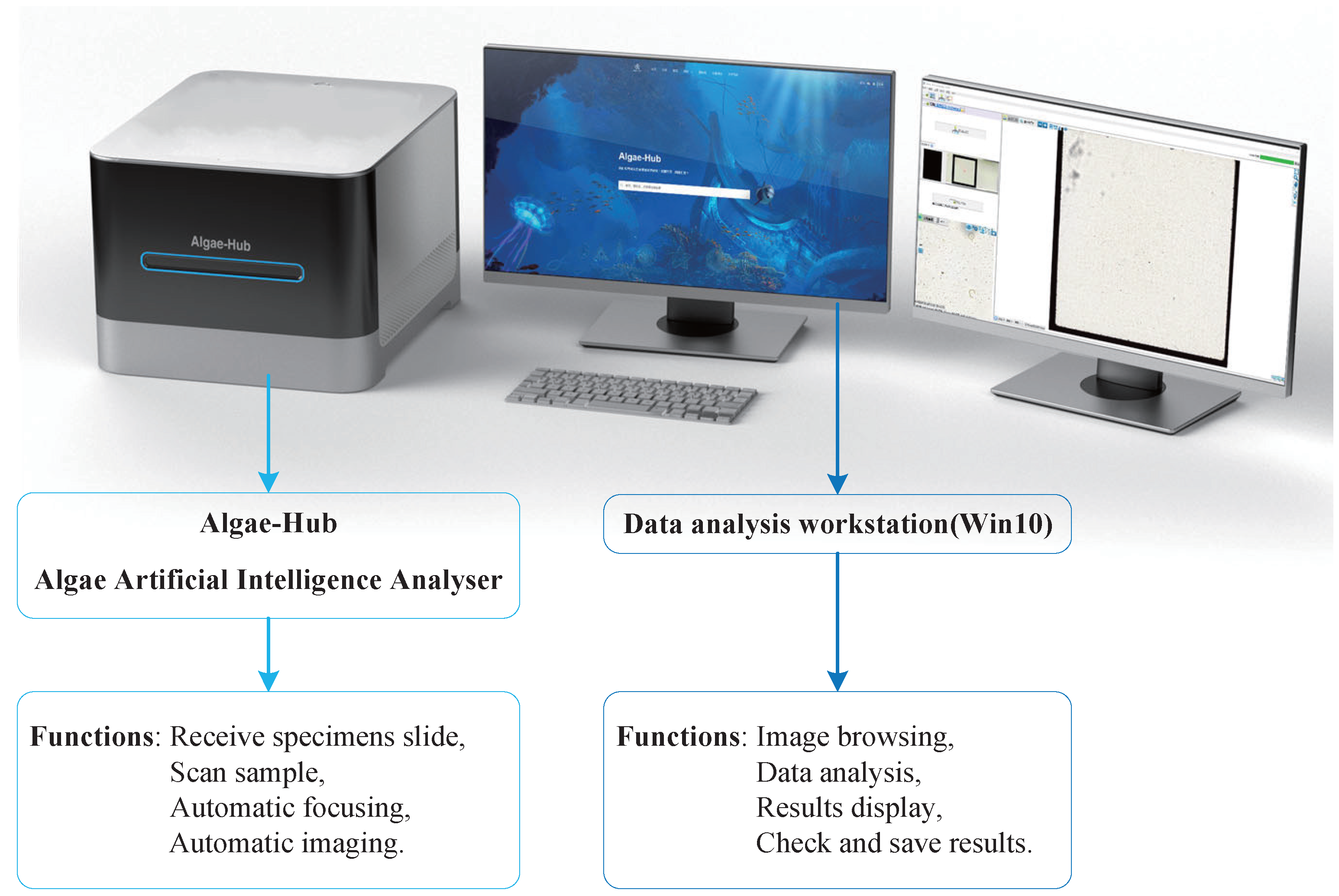
3.1. Algal Self-Organized Detection System
3.2. Dataset Acquisition and Pre-Processing
- (i)
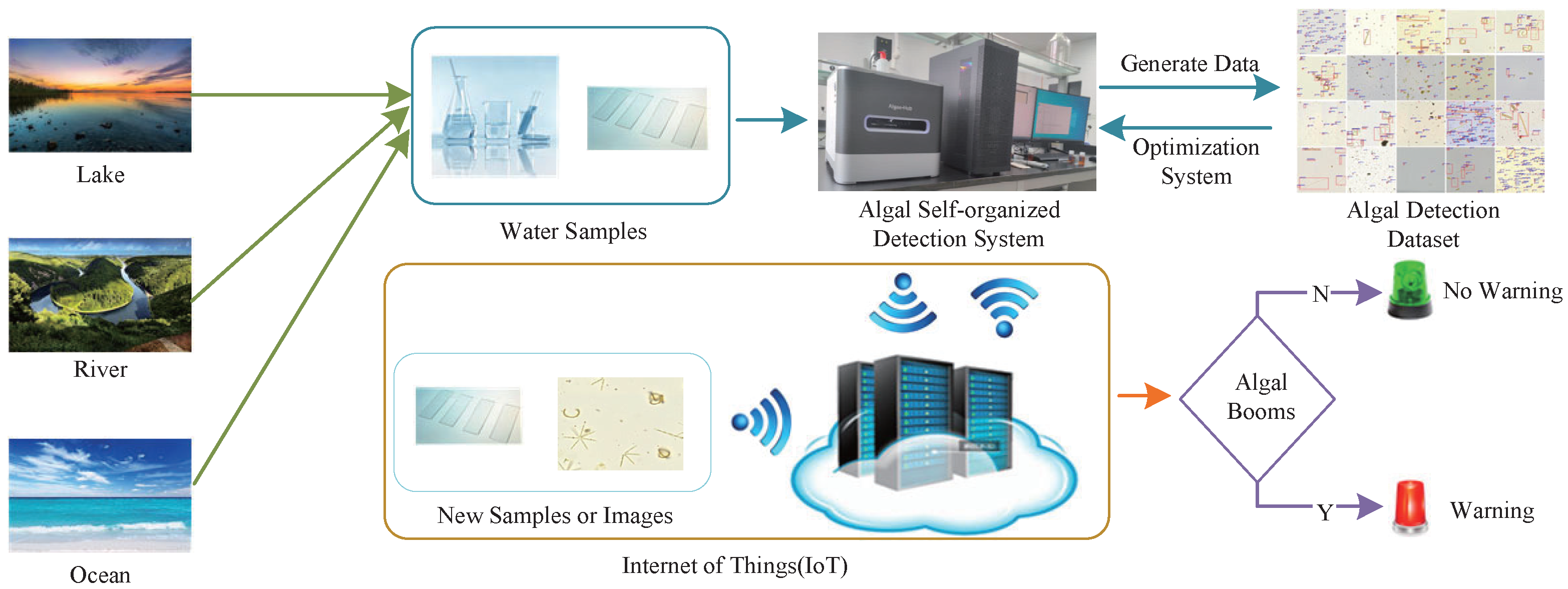
- For the slide specimens, the algal self-organized detection system automatically scans to obtain algal images.
- (ii)
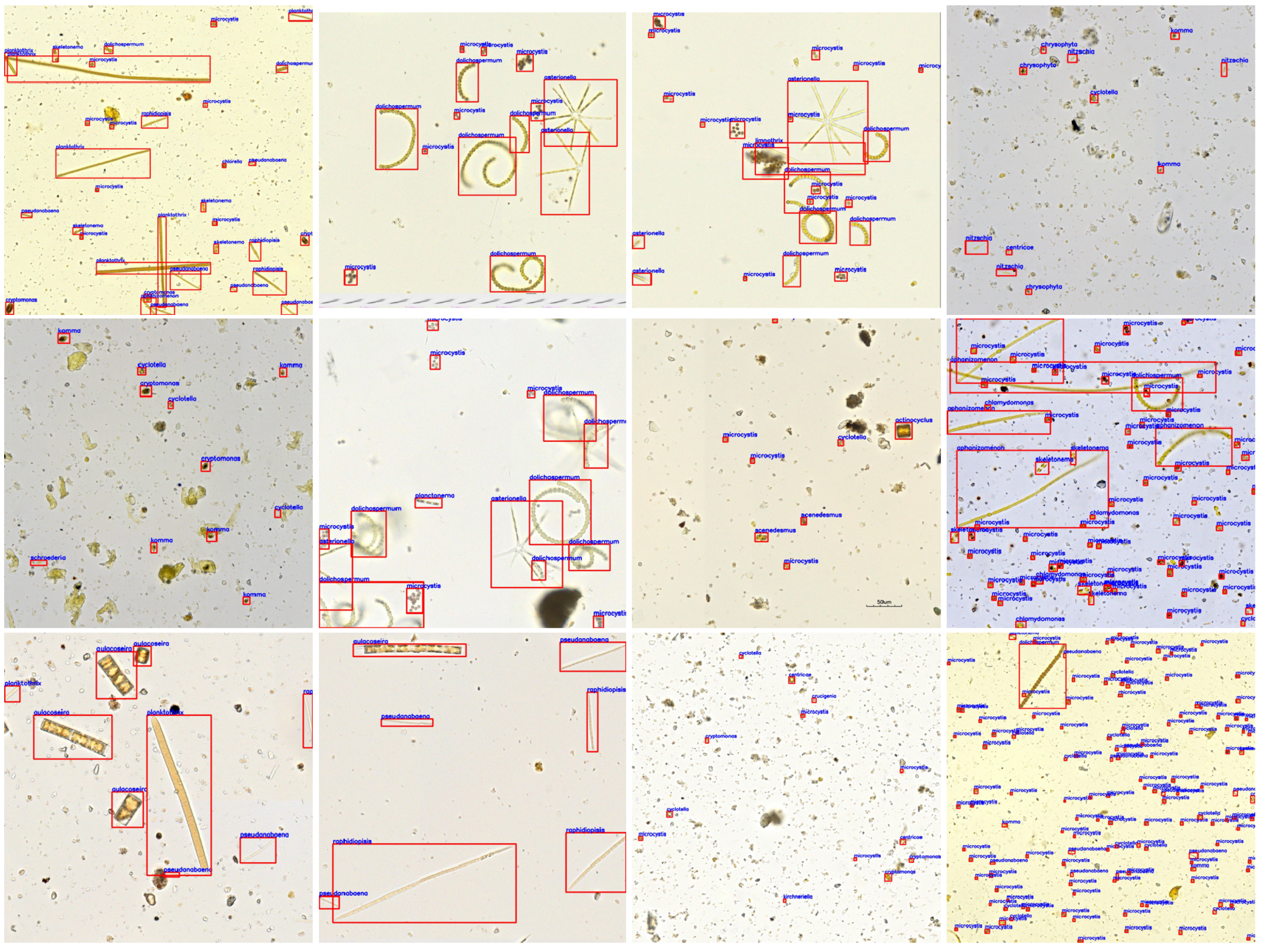
- The algal images acquired in (i) are cross-labeled by 15 algal experts using labelImg annotation software with reference to the VOC dataset format and the annotation files are saved. Then, the initial algal detection dataset is generated.
- (iii)
- The algal detection dataset generated in (ii) is trained by the object detection algorithm to obtain the optimal weight and the optimal weight is imported into the algal self-organized detection system.
- (iv)
- For the new slide specimens or images, the algal self-organized detection system implements automatic scanning, analysis and export of the analysis result images.
- (v)
- The algal images analyzed in (iv) are manually checked and combine with the algal detection data produced in (ii) to generate a new algal detection dataset.
- (vi)
- Repeat (iii)–(v) to finally obtain the algal detection dataset used in this paper.
3.3. Detection Evaluation
4. Experiments
4.1. Implementation
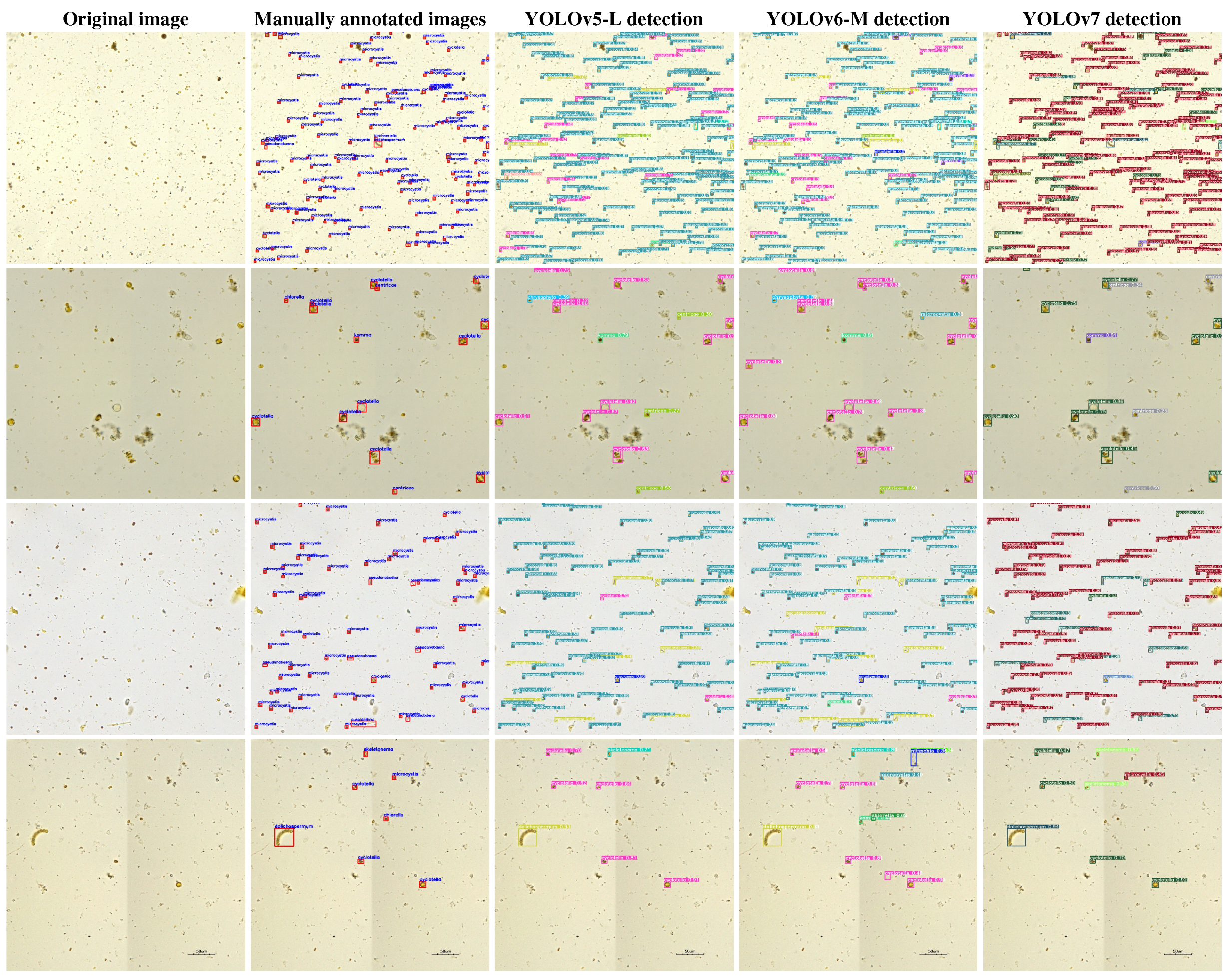
4.2. Detection Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Harvell, C.D.; Kim, K.; Burkholder, J.; Colwell, R.R.; Epstein, P.R.; Grimes, D.J.; Hofmann, E.E.; Lipp, E.; Osterhaus, A.; Overstreet, R.M.; et al. Emerging marine diseases–climate links and anthropogenic factors. Science 1999, 285, 1505–1510. [Google Scholar] [CrossRef] [PubMed]
- Van Dolah, F.M. Marine algal toxins: Origins, health effects and their increased occurrence. Environ. Health Perspect. 2000, 108, 133–141. [Google Scholar] [CrossRef] [PubMed]
- Landsberg, J.H. The effects of harmful algal blooms on aquatic organisms. Rev. Fish. Sci. 2002, 10, 113–390. [Google Scholar] [CrossRef]
- Davis, C.C. Gymnodinium brevis sp. nov., a cause of discolored water and animal mortality in the Gulf of Mexico. Bot. Gaz. 1948, 109, 358–360. [Google Scholar] [CrossRef]
- Heil, C.A.; Steidinger, K.A. Monitoring, management and mitigation of Karenia blooms in the eastern Gulf of Mexico. Harmful Algae 2009, 8, 611–617. [Google Scholar] [CrossRef]
- Qin, B.; Zhu, G.; Gao, G.; Zhang, Y.; Li, W.; Paerl, H.W.; Carmichael, W.W. A drinking water crisis in Lake Taihu, China: Linkage to climatic variability and lake management. Environ. Manag. 2010, 45, 105–112. [Google Scholar] [CrossRef]
- Paerl, H.W.; Gardner, W.S.; McCarthy, M.J.; Peierls, B.L.; Wilhelm, S.W. Algal blooms: Noteworthy nitrogen. Science 2014, 346, 175. [Google Scholar] [CrossRef]
- Sun, Y.; Liang, D.; Wang, X.; Tang, X. Deepid3: Face recognition with very deep neural networks. arXiv 2015, arXiv:1502.00873. [Google Scholar]
- Li, B.; Ouyang, W.; Sheng, L.; Zeng, X.; Wang, X. Gs3d: An efficient 3d object detection framework for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1019–1028. [Google Scholar]
- Feng, D.; Haase-Schütz, C.; Rosenbaum, L.; Hertlein, H.; Glaeser, C.; Timm, F.; Wiesbeck, W.; Dietmayer, K. Deep multi-modal object detection and semantic segmentation for autonomous driving: Datasets, methods and challenges. IEEE Trans. Intell. Transp. Syst. 2020, 22, 1341–1360. [Google Scholar] [CrossRef]
- Pedraza, A.; Bueno, G.; Deniz, O.; Cristóbal, G.; Blanco, S.; Borrego-Ramos, M. Automated diatom classification (Part B): A deep learning approach. Appl. Sci. 2017, 7, 460. [Google Scholar] [CrossRef]
- Park, J.; Lee, H.; Park, C.Y.; Hasan, S.; Heo, T.Y.; Lee, W.H. Algal morphological identification in watersheds for drinking water supply using neural architecture search for convolutional neural network. Water 2019, 11, 1338. [Google Scholar] [CrossRef]
- Yadav, D.; Jalal, A.; Garlapati, D.; Hossain, K.; Goyal, A.; Pant, G. Deep learning-based ResNeXt model in phycological studies for future. Algal Res. 2020, 50, 102018. [Google Scholar] [CrossRef]
- Xu, L.; Xu, L.; Chen, Y.; Zhang, Y.; Yang, J. Accurate Classification of Algae Using Deep Convolutional Neural Network with a Small Database. ACS ES&T Water 2022, 2, 1921–1928. [Google Scholar]
- Salido, J.; Sánchez, C.; Ruiz-Santaquiteria, J.; Cristóbal, G.; Blanco, S.; Bueno, G. A low-cost automated digital microscopy platform for automatic identification of diatoms. Appl. Sci. 2020, 10, 6033. [Google Scholar] [CrossRef]
- Baek, S.S.; Pyo, J.; Pachepsky, Y.; Park, Y.; Ligaray, M.; Ahn, C.Y.; Kim, Y.H.; Chun, J.A.; Cho, K.H. Identification and enumeration of cyanobacteria species using a deep neural network. Ecol. Indic. 2020, 115, 106395. [Google Scholar] [CrossRef]
- Park, J.; Baek, J.; Kim, J.; You, K.; Kim, K. Deep Learning-Based Algal Detection Model Development Considering Field Application. Water 2022, 14, 1275. [Google Scholar] [CrossRef]
- Wu, X.; Sahoo, D.; Hoi, S.C. Recent advances in deep learning for object detection. Neurocomputing 2020, 396, 39–64. [Google Scholar] [CrossRef]
- Felzenszwalb, P.F.; Girshick, R.B.; McAllester, D.; Ramanan, D. Object detection with discriminatively trained part-based models. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1627–1645. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes (voc) challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Jocher, G.; Chaurasia, A.; Stoken, A.; Borovec, J.; Kwon, Y.; Michael, K.; Fang, J. ultralytics/yolov5: v6.2-YOLOv5 Classification Models, Apple M1, Reproducibility, ClearML and Deci.ai integrations. GitHub 2022. [Google Scholar] [CrossRef]
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Ke, Z.; Li, Q.; Cheng, M.; Nie, W.; et al. YOLOv6: A single-stage object detection framework for industrial applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Samantaray, A.; Yang, B.; Dietz, J.E.; Min, B.C. Algae detection using computer vision and deep learning. arXiv 2018, arXiv:1811.10847. [Google Scholar]
- Qian, P.; Zhao, Z.; Liu, H.; Wang, Y.; Peng, Y.; Hu, S.; Zhang, J.; Deng, Y.; Zeng, Z. Multi-target deep learning for algal detection and classification. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 1954–1957. [Google Scholar]
- Ali, S.; Khan, Z.; Hussain, A.; Athar, A.; Kim, H.C. Computer Vision Based Deep Learning Approach for the Detection and Classification of Algae Species Using Microscopic Images. Water 2022, 14, 2219. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | Train | Val | Trainval | Test | ||||
|---|---|---|---|---|---|---|---|---|
| Images | Objects | Images | Objects | Images | Objects | Images | Objects | |
| achnanthidium | 556 | 915 | 137 | 220 | 693 | 1135 | 87 | 138 |
| actinocyclus | 566 | 755 | 156 | 220 | 722 | 975 | 85 | 111 |
| aphanizomenon | 756 | 1344 | 211 | 433 | 967 | 1777 | 121 | 216 |
| aphanocapsa | 264 | 308 | 68 | 73 | 332 | 381 | 40 | 48 |
| asterionella | 356 | 637 | 105 | 172 | 461 | 809 | 54 | 101 |
| aulacoseira | 3126 | 3911 | 874 | 1089 | 4000 | 5000 | 418 | 533 |
| centricae | 1951 | 4693 | 590 | 1421 | 2541 | 6114 | 256 | 608 |
| chlamydomonas | 1234 | 1667 | 373 | 487 | 1607 | 2154 | 189 | 239 |
| chlorella | 3334 | 6995 | 944 | 1910 | 4278 | 8905 | 487 | 990 |
| chlorophyta | 141 | 164 | 37 | 46 | 178 | 210 | 21 | 23 |
| chromulina | 199 | 275 | 64 | 77 | 263 | 352 | 31 | 41 |
| chrysophyta | 819 | 1285 | 241 | 419 | 1060 | 1704 | 109 | 170 |
| coelastrum | 172 | 180 | 50 | 50 | 222 | 230 | 20 | 22 |
| cosmarium | 426 | 521 | 106 | 132 | 532 | 653 | 75 | 101 |
| crucigenia | 608 | 676 | 187 | 207 | 795 | 883 | 78 | 91 |
| cryptomonas | 2932 | 4335 | 826 | 1211 | 3758 | 5546 | 405 | 598 |
| cryptophyta | 204 | 638 | 59 | 159 | 263 | 797 | 33 | 116 |
| cuspidothrix | 557 | 858 | 155 | 249 | 712 | 1107 | 103 | 147 |
| cyanophyta | 84 | 288 | 17 | 45 | 101 | 333 | 7 | 26 |
| cyclotella | 8262 | 27,625 | 2408 | 8035 | 10,670 | 35,660 | 1210 | 4052 |
| cylindrospermopsis | 369 | 2328 | 108 | 640 | 477 | 2968 | 44 | 242 |
| desmodesmus | 890 | 959 | 274 | 306 | 1164 | 1265 | 124 | 133 |
| dinobryon | 163 | 166 | 32 | 33 | 195 | 199 | 22 | 22 |
| dinophyta | 180 | 187 | 53 | 55 | 233 | 242 | 30 | 32 |
| dolichospermum | 2832 | 8783 | 789 | 2746 | 3621 | 11,529 | 367 | 776 |
| euglena | 134 | 146 | 42 | 45 | 176 | 191 | 17 | 19 |
| kirchneriella | 1086 | 1268 | 368 | 426 | 1454 | 1694 | 152 | 176 |
| komma | 4664 | 16,155 | 1429 | 4878 | 6093 | 21,033 | 667 | 2425 |
| limnothrix | 1581 | 3700 | 430 | 1021 | 2011 | 4721 | 248 | 545 |
| merismopedia | 422 | 546 | 125 | 154 | 547 | 700 | 64 | 85 |
| microcystis | 7316 | 244,604 | 2164 | 73,860 | 9480 | 318,464 | 1019 | 32,796 |
| monoraphidium | 438 | 464 | 130 | 145 | 568 | 609 | 61 | 66 |
| mougeotia | 574 | 1111 | 142 | 270 | 716 | 1381 | 90 | 201 |
| navicula | 410 | 570 | 100 | 132 | 510 | 702 | 56 | 70 |
| nitzschia | 1991 | 2682 | 560 | 759 | 2551 | 3441 | 258 | 345 |
| oocystis | 1710 | 2145 | 480 | 609 | 2190 | 2754 | 259 | 324 |
| pediastrum | 172 | 174 | 42 | 42 | 214 | 216 | 23 | 25 |
| pennatae | 200 | 256 | 48 | 65 | 248 | 321 | 36 | 40 |
| peridiniopsis | 93 | 146 | 22 | 38 | 115 | 184 | 16 | 31 |
| phacotus | 127 | 168 | 36 | 55 | 163 | 223 | 19 | 32 |
| planctonema | 493 | 815 | 144 | 229 | 637 | 1044 | 57 | 95 |
| planktosphaeria | 1156 | 1923 | 331 | 499 | 1487 | 2422 | 171 | 300 |
| planktothricoides | 1042 | 2155 | 270 | 540 | 1312 | 2695 | 142 | 284 |
| planktothrix | 1597 | 3508 | 463 | 992 | 2060 | 4500 | 231 | 536 |
| pseudanabaena | 4281 | 14,506 | 1227 | 4139 | 5508 | 18,645 | 625 | 2058 |
| raphidiopisis | 1212 | 2191 | 345 | 635 | 1557 | 2826 | 169 | 311 |
| rhabdogloea | 1086 | 1358 | 278 | 358 | 1364 | 1716 | 141 | 181 |
| scenedesmus | 1706 | 1949 | 498 | 557 | 2204 | 2506 | 249 | 288 |
| schroederia | 332 | 348 | 81 | 85 | 413 | 433 | 46 | 50 |
| skeletonema | 3561 | 15,738 | 1017 | 4513 | 4578 | 20,251 | 466 | 2033 |
| tetradesmus | 150 | 171 | 43 | 50 | 193 | 221 | 24 | 25 |
| tetraedron | 739 | 834 | 194 | 221 | 933 | 1055 | 107 | 117 |
| trachelomonas | 274 | 287 | 90 | 100 | 364 | 387 | 45 | 52 |
| ulnaria | 1766 | 2215 | 511 | 612 | 2277 | 2827 | 261 | 336 |
| Total | 19831 | 392,626 | 5665 | 116,464 | 25,496 | 509,090 | 2833 | 53,422 |
| Model | Parameters | FLOPs | mAP@.5 | mAP@.5:.95 | FPS |
|---|---|---|---|---|---|
| YOLOv5-N (r6.2) [31] | 1.8M | 4.4G | 56.1% | 38.0% | 435 |
| YOLOv5-S (r6.2) [31] | 7.2M | 16.2G | 65.9% | 45.7% | 370 |
| YOLOv5-M (r6.2) [31] | 21.1M | 48.5G | 68.3% | 49.0% | 208 |
| YOLOv5-L (r6.2) [31] | 46.4M | 108.6G | 69.6% | 50.5% | 114 |
| YOLOv6-N [32] | 4.31M | 11.1G | 56.5% | 39.4% | 658 |
| YOLOv6-T [32] | 9.69M | 24.88G | 61.1% | 43.0% | 383 |
| YOLOv6-S [32] | 17.21M | 44.14G | 65.4% | 46.2% | 299 |
| YOLOv6-M [32] | 34.27M | 82.12G | 68.6% | 50.1% | 179 |
| YOLOv7-Tiny [33] | 6.2M | 13.5G | 61.7% | 42.9% | 526 |
| YOLOv7 [33] | 36.8M | 104.1G | 70.6% | 50.4% | 204 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, X.; Ma, C.; Sun, B.; Zhang, J. An Efficient Self-Organized Detection System for Algae. Sensors 2023, 23, 1609. https://doi.org/10.3390/s23031609
Gong X, Ma C, Sun B, Zhang J. An Efficient Self-Organized Detection System for Algae. Sensors. 2023; 23(3):1609. https://doi.org/10.3390/s23031609
Chicago/Turabian StyleGong, Xingrui, Chao Ma, Beili Sun, and Junyi Zhang. 2023. "An Efficient Self-Organized Detection System for Algae" Sensors 23, no. 3: 1609. https://doi.org/10.3390/s23031609
APA StyleGong, X., Ma, C., Sun, B., & Zhang, J. (2023). An Efficient Self-Organized Detection System for Algae. Sensors, 23(3), 1609. https://doi.org/10.3390/s23031609