
Study on Multi-Heterogeneous Sensor Data Fusion Method Based on Millimeter-Wave Radar and Camera

Abstract
1. Introduction
- To improve the reliability of the system and the robustness of the perception module, it is necessary to consider the limitations of perception sensors in complex and dynamic road traffic environments. In such conditions, certain sources of perception may be unusable or have high levels of uncertainty, or they may be outside the sensing range of a particular sensor while another perception sensor can still provide useful information. Information fusion can mitigate these challenges and enable the system to continue working without interruptions, further enhancing the reliability of the perception module.
- To improve measurement accuracy and enhance target detection capabilities, it is essential to utilize the complementary characteristics of different sensors in a fused system. This approach can effectively improve the accuracy of target recognition and measurement precision.
- To increase perception reliability and reduce uncertainty, it is necessary to use joint perception information from multiple sensors. This approach can enhance the credibility of detecting targets, increase the redundancy of the perception component, expand the perception coverage, and improve the spatial resolution of perception.
- For intelligent collision avoidance systems, the key to improving system reliability is how to fully utilize and explore multi-source heterogeneous perception data to reduce the uncertainty of perception and cognition in complex environments.
2. Background and Previous Work
3. Data Fusion Framework
4. Interacting Multiple Model Adaptive Cubature Kalman Filter
4.1. Adaptive Cubature Kalman Filter
- (1)
- Assume that and are known. By Cholesky decomposition, is decomposed as
- (2)
- Estimate the cubature points
- (3)
- Estimate the propagated cubature points and the predicted state
- (4)
- Estimate the posterior state covariance
- (5)
- Estimate the cubature points
- (6)
- Estimate the predicted measurement and the square root of the corresponding error covariance
- (7)
- Estimate the cross-covariance matrix
- (8)
- Estimate the Kalman gain
- (9)
- Estimate the updated state and the square root of the corresponding error covariance
4.2. The Noise Statistics Estimation
- (1)
- Expectation calculation
- (2)
- Maximum likelihood estimation
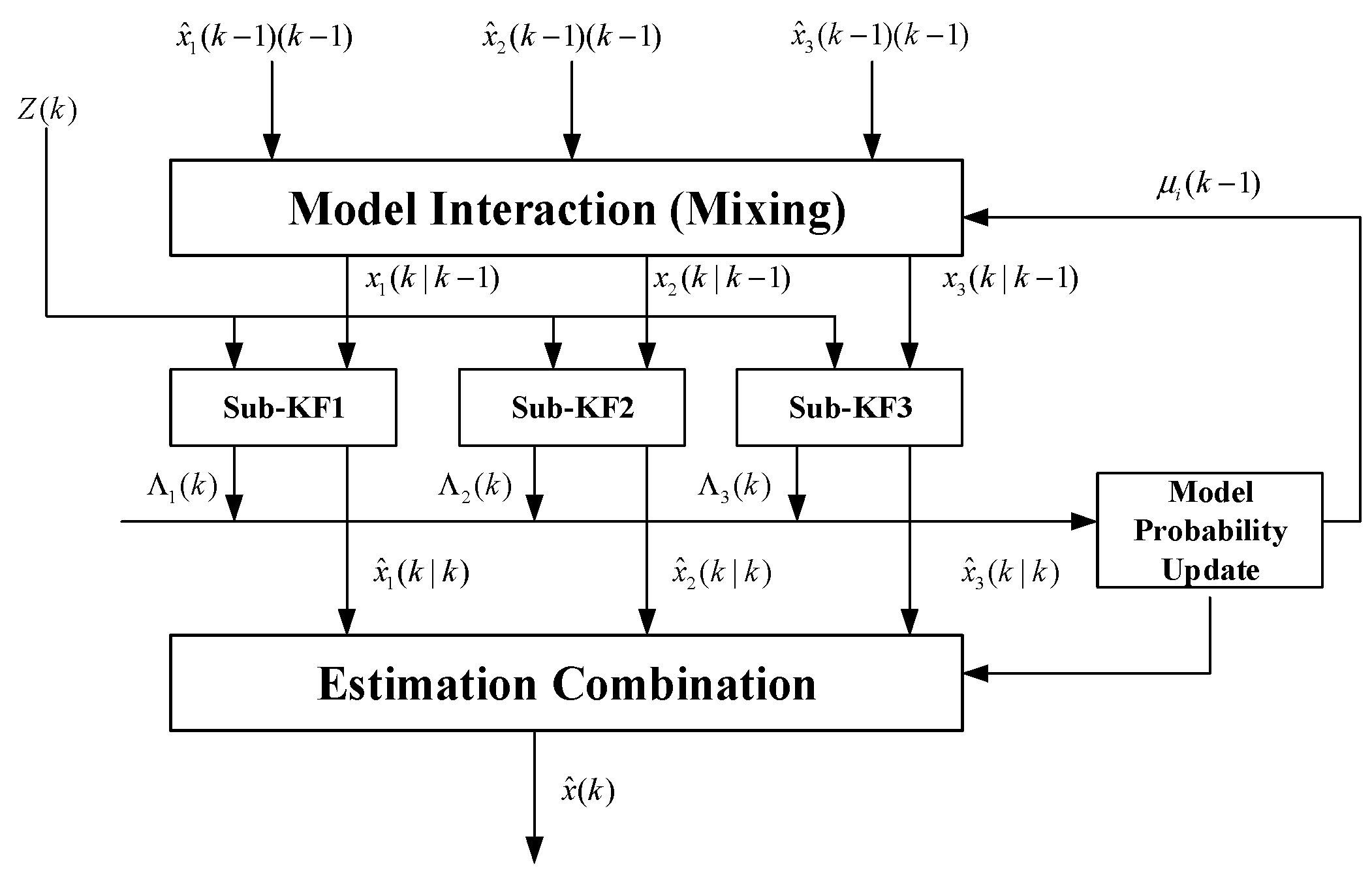
4.3. Adaptive Interactive Multiple Model Motion Prediction
- Model interaction: the model conditions such as system state and covariance can be obtained from all filters at the previous time k−1.
- 2.
- Model matched prediction update: based on the mixed initial state estimation and measurements, motion prediction state and covariance are calculated for each motion model.
- 3.
- Model probability update: the likelihood for each model can be calculated using the error covariance and the mean error. Assuming it follows the Gaussian distribution, then the likelihood function of model j is shown as follows.
- 4.
- Posterior state estimation
4.4. Improved JPDA Algorithm considering Uncertainty Fusion
- (1)
- Each measurement can only originate from a unique true target or is not associated with any existing track.
- (2)
- Each target can correspond to at most one measurement. Thus, a large number of association events occur during the process of associating measurements with true targets. As the number of measurements and true targets increases, calculating the conditional probability of association events exponentially grows. The proposed algorithm addresses this issue by using an adaptive gating technique to filter out unlikely association events, thereby ensuring real-time processing.
- (1)
- Create the association event confirmation matrix based on the current measurement information and the key matching pairs of the previous measurement.
- (2)
- Calculate the conditional probability of association events, assuming there are N targets within the tracking field of view, where the target tracking gate can be established at the predicted positions of N targets at time k. Among them, m measurement results fall within the target tracking gate field.
- (3)
- Correction of associated event probabilities
- (4)
- Normalization processing
- (5)
- Object state estimation
5. Experimental Test and Validation
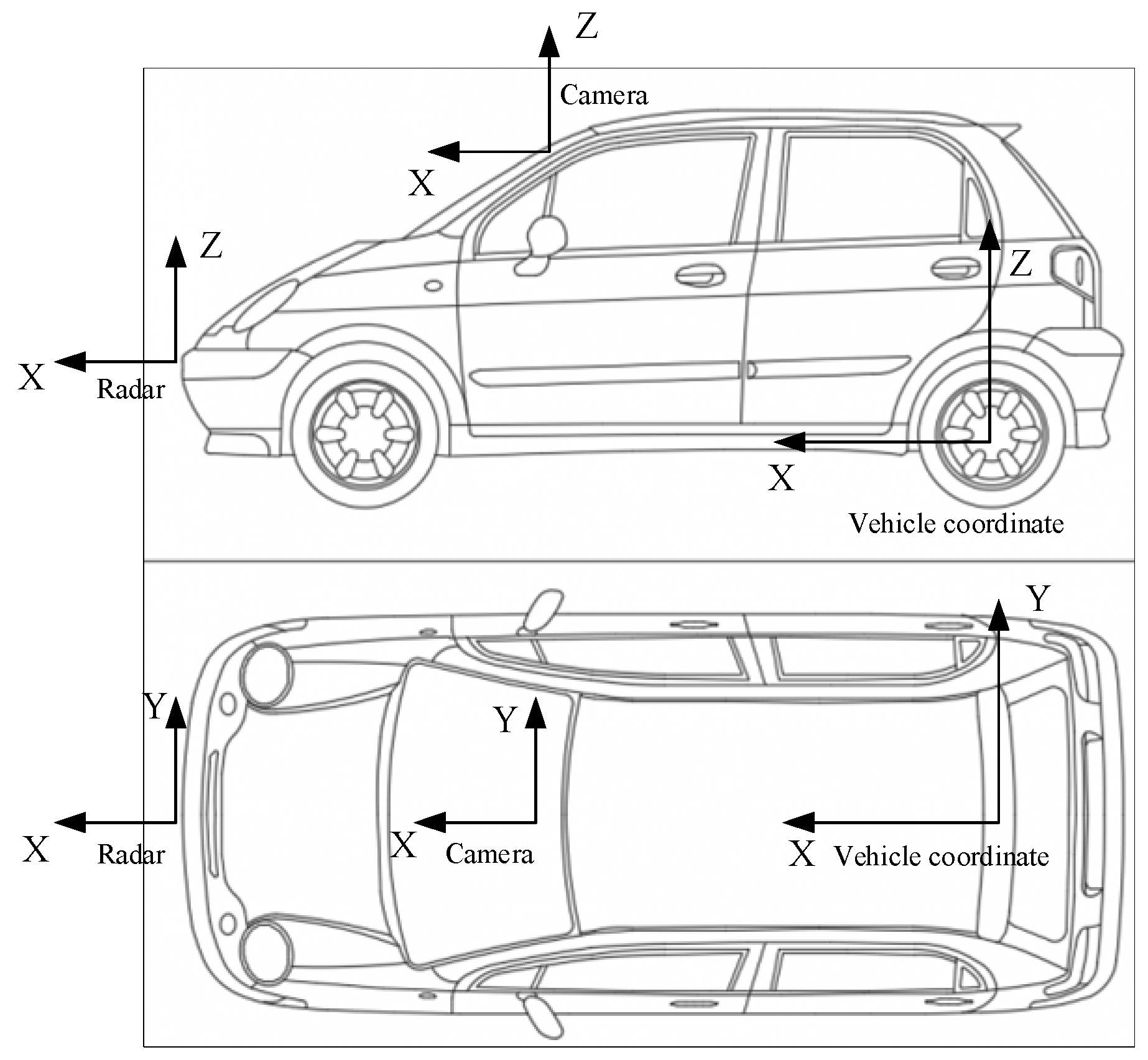
5.1. Heterogeneous Sensor Spatio-Temporal Synchronization
5.2. Optimal Estimation of Object-Level Information Fusion
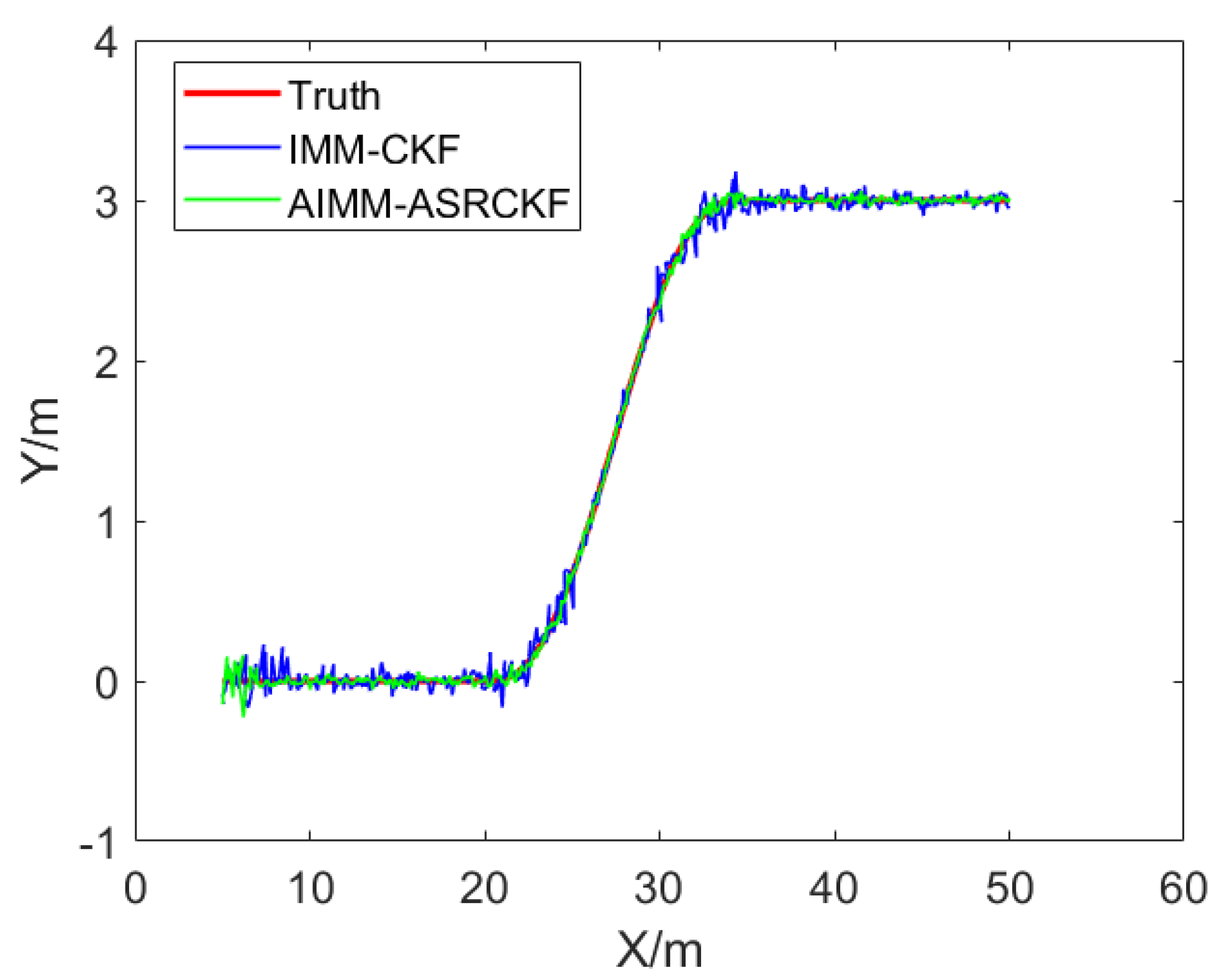
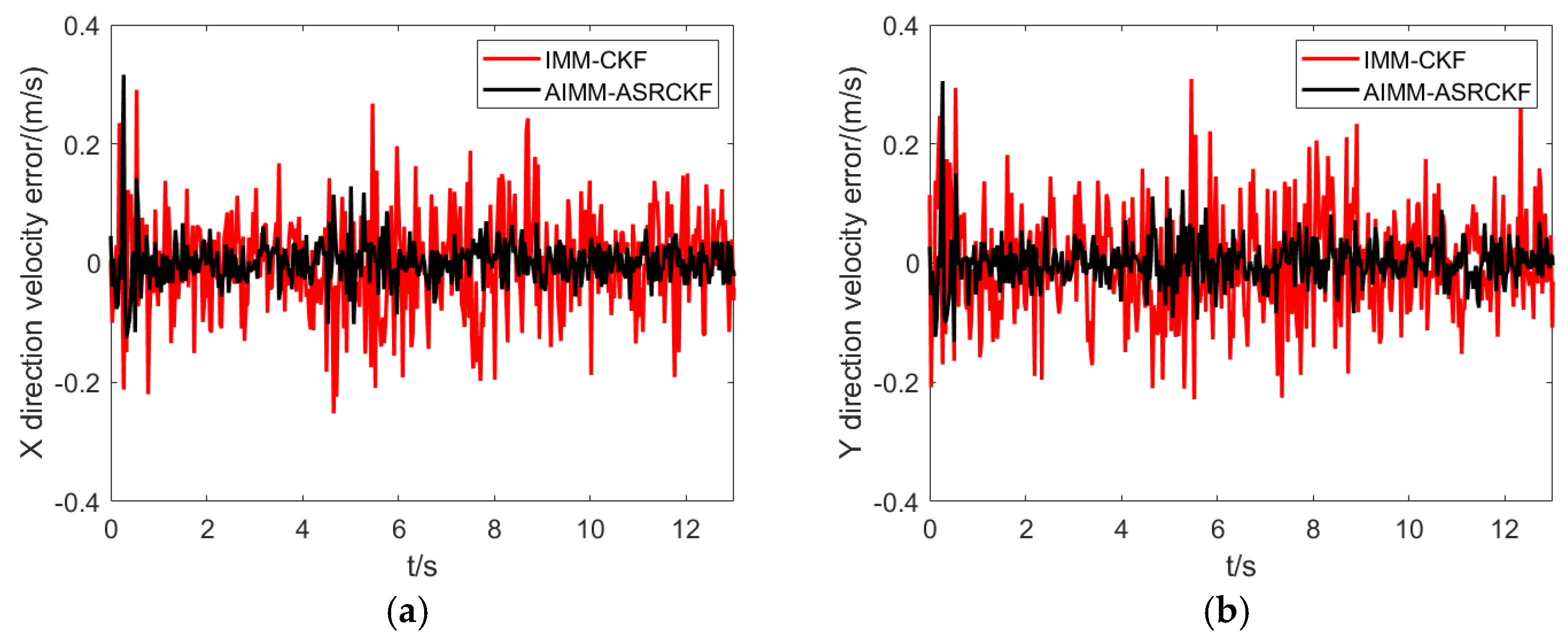
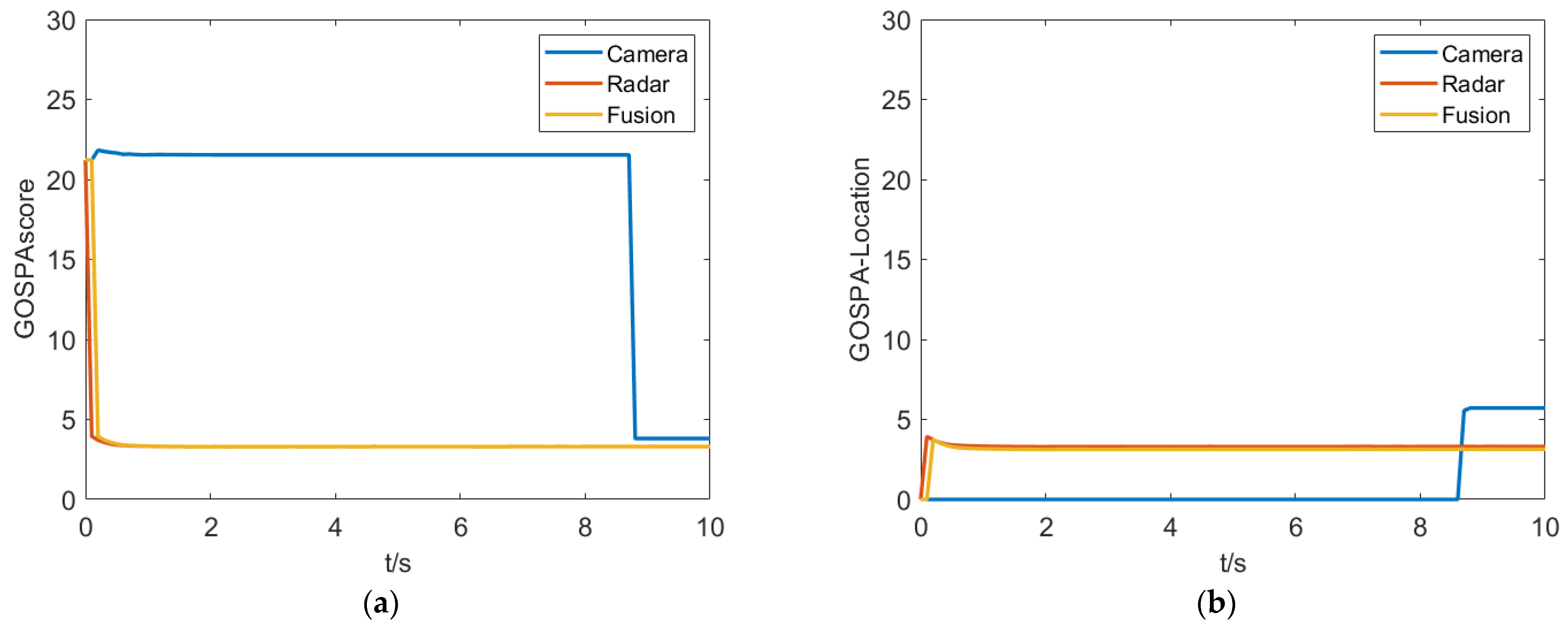
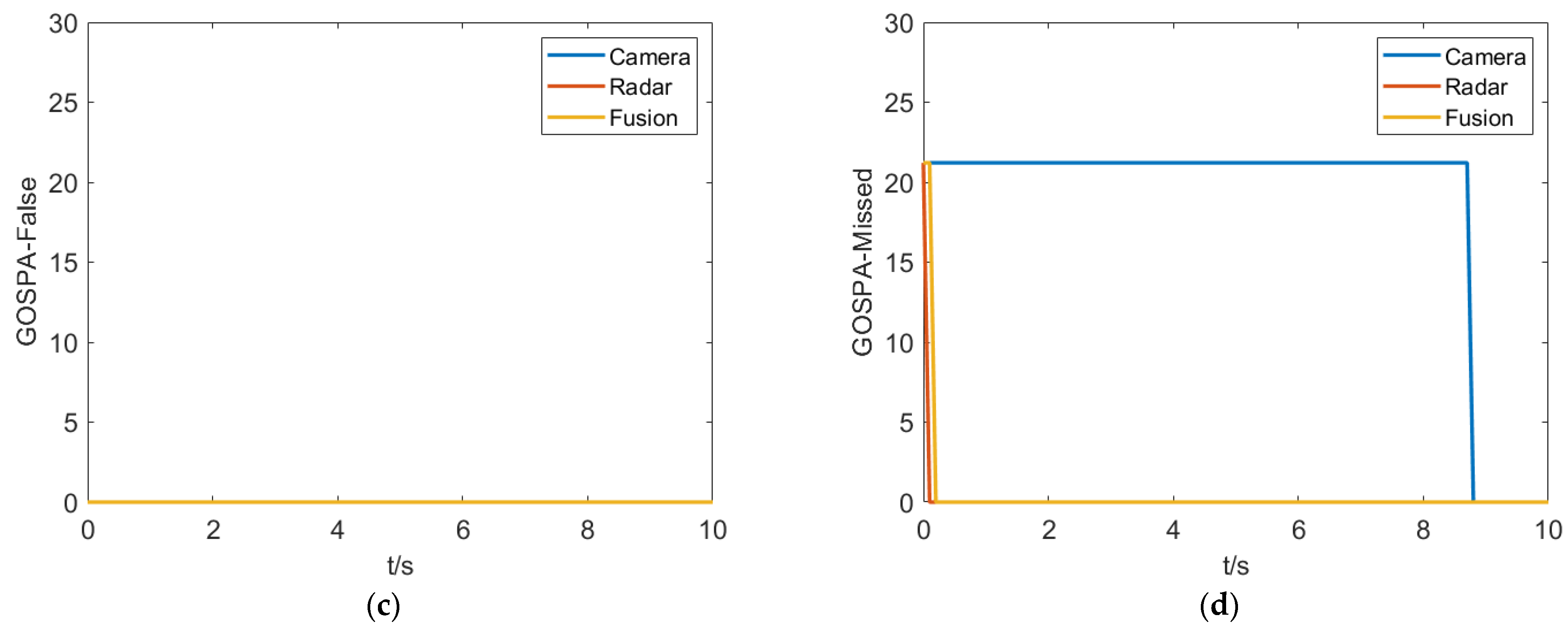
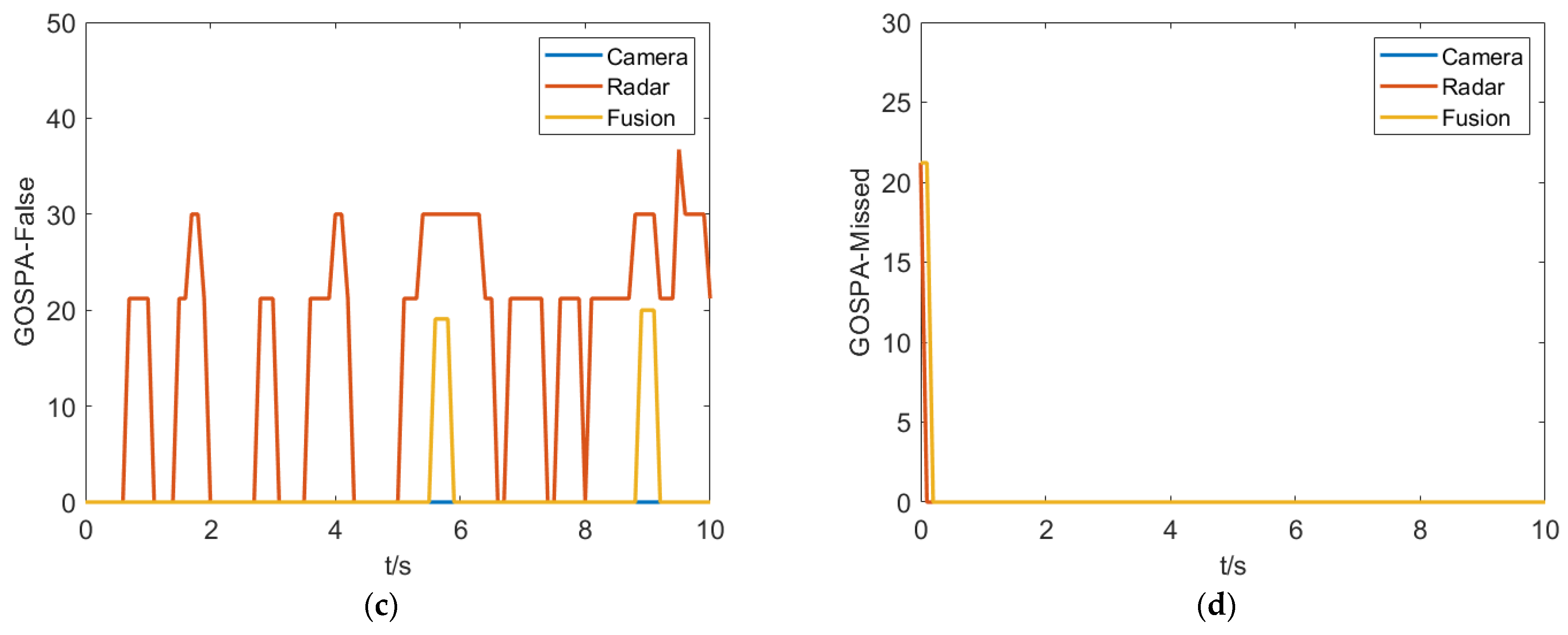
5.3. Experiments and Results Analysis
- (1)
- The crossroad scenario
- (2)
- Pedestrian crossing scenario
- (3)
- Nighttime scenario
- (4)
- Underground parking scenario
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schmidt, S.; Schlager, B.; Muckenhuber, S.; Stark, R. Configurable Sensor Model Architecture for the Development of Auto-mated Driving Systems. Sensors 2021, 21, 4687. [Google Scholar] [CrossRef]
- Wei, Z.; Zhang, F.; Chang, S.; Liu, Y.; Wu, H.; Feng, Z. MmWave Radar and Vision Fusion for Object Detection in Autonomous Driving: A Review. Sensors 2022, 22, 2542. [Google Scholar] [CrossRef] [PubMed]
- Ogle, T.L.; Blair, W.D.; Slocumb, B.J.; Dunham, D.T. Assessment of Hierarchical Multi-Sensor Multi-Target Track Fusion in the Presence of Large Sensor Biases. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; Volume 12, pp. 1–7. [Google Scholar]
- Hernandez, W. A Survey on Optimal Signal Processing Techniques Applied to Improve the Performance of Mechanical Sensors in Automotive Applications. Sensors 2007, 7, 84–102. [Google Scholar] [CrossRef]
- Chou, J.C.; Lin, C.Y.; Liao, Y.H.; Chen, J.T.; Tsai, Y.L.; Chen, J.L.; Chou, H.T. Data Fusion and Fault Diagnosis for Flexible Arrayed pH Sensor Measurement System Based on LabVIEW. IEEE Sens. J. 2014, 14, 1502–1518. [Google Scholar] [CrossRef]
- Tak, S.; Kim, S.; Yeo, H. Development of a Deceleration-Based Surrogate Safety Measure for Rear-End Collision Risk. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2435–2445. [Google Scholar] [CrossRef]
- Bhadoriya, A.S.; Vegamoor, V.; Rathinam, S. Vehicle Detection and Tracking Using Thermal Cameras in Adverse Visibility Conditions. Sensors 2022, 22, 4567. [Google Scholar] [CrossRef]
- Chen, K.; Liu, S.; Gao, M.; Zhou, X. Simulation and Analysis of an FMCW Radar against the UWB EMP Coupling Responses on the Wires. Sensors 2022, 22, 4641. [Google Scholar] [CrossRef]
- Aeberhard, M.; Schlichtharle, S.; Kaempchen, N.; Bertram, T. Track-to-Track Fusion With Asynchronous Sensors Using Information Matrix Fusion for Surround Environment Perception. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1717–1726. [Google Scholar] [CrossRef]
- Minea, M.; Dumitrescu, C.M.; Dima, M. Robotic Railway Multi-Sensing and Profiling Unit Based on Artificial Intelligence and Data Fusion. Sensors 2021, 21, 6876. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y.; Niu, Q. Multi-Sensor Fusion in Automated Driving: A Survey. IEEE Access 2020, 8, 2847–2868. [Google Scholar] [CrossRef]
- Deo, A.; Palade, V.; Huda, M.N. Centralised and Decentralised Sensor Fusion-Based Emergency Brake Assist. Sensors 2021, 21, 5422. [Google Scholar] [CrossRef]
- Bae, H.; Lee, G.; Yang, J.; Shin, G.; Choi, G.; Lim, Y. Estimation of the Closest In-Path Vehicle by Low-Channel LiDAR and Camera Sensor Fusion for Autonomous Vehicles. Sensors 2021, 21, 3124. [Google Scholar] [CrossRef]
- Prochowski, L.; Szwajkowski, P.; Ziubiński, M. Research Scenarios of Autonomous Vehicles, the Sensors and Measurement Systems Used in Experiments. Sensors 2022, 22, 6586. [Google Scholar] [CrossRef]
- Lee, J.S.; Park, T.H. Fast Road Detection by CNN-Based Camera–Lidar Fusion and Spherical Coordinate Transformation. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5802–5810. [Google Scholar] [CrossRef]
- Haberjahn, M.; Junghans, M. Vehicle environment detection by a combined low and mid level fusion of a laser scanner and stereo vision. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; Volume 12, pp. 1634–1639. [Google Scholar]
- Sengupta, A.; Cheng, L.; Cao, S. Robust Multiobject Tracking Using Mmwave Radar-Camera Sensor Fusion. IEEE Sens. Lett. 2022, 6, 1–4. [Google Scholar] [CrossRef]
- Shin, S.G.; Ahn, D.R.; Lee, H.K. Occlusion handling and track management method of high-level sensor fusion for robust pedestrian tracking. In Proceedings of the 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Daegu, Republic of Korea, 16–18 November 2017; Volume 6, pp. 233–238. [Google Scholar]
- Du, Y.; Qin, B.; Zhao, C.; Zhu, Y.; Cao, J.; Ji, Y. A Novel Spatio-Temporal Synchronization Method of Roadside Asynchronous MMW Radar-Camera for Sensor Fusion. IEEE Trans. Intell. Transp. Syst. 2021, 23, 22278–22289. [Google Scholar] [CrossRef]
- Gonzalo, R.I.; Maldonado, C.S.; Ruiz, J.A.; Alonso, I.P.; Llorca, D.F.; Sotelo, M.A. Testing Predictive Automated Driving Systems: Lessons Learned and Future Recommendations. IEEE Intell. Transp. Syst. Mag. 2022, 14, 77–93. [Google Scholar] [CrossRef]
- Morris, P.J.B.; Hari, K.V.S. Detection and Localization of Unmanned Aircraft Systems Using Millimeter-Wave Automotive Radar Sensors. IEEE Sens. Lett. 2021, 5, 1–4. [Google Scholar] [CrossRef]
- Cai, X.; Giallorenzo, M.; Sarabandi, K. Machine Learning-Based Target Classification for MMW Radar in Autonomous Driving. IEEE Trans. Intell. Veh. 2021, 6, 678–689. [Google Scholar] [CrossRef]
- García Daza, I.; Rentero, M.; Salinas Maldonado, C.; Izquierdo Gonzalo, R.; Hernández Parra, N.; Ballardini, A.; Fernandez Llorca, D. Fail-aware lidar-based odometry for autonomous vehicles. Sensors 2020, 20, 4097. [Google Scholar] [CrossRef]
- Ren, Z.; Zhang, H.; Li, Z. Improved YOLOv5 Network for Real-Time Object Detection in Vehicle-Mounted Camera Capture Scenarios. Sensors 2023, 23, 4589. [Google Scholar] [CrossRef]
- Wu, Q.; Shi, S.; Wan, Z.; Fan, Q.; Fan, P.; Zhang, C. Towards V2I Age-aware Fairness Access: A DQN Based Intelligent Vehicular Node Training and Test Method. Chin. J. Electron. 2022, 7, 1–93. [Google Scholar]
- Li, S.; Yoon, H.-S. Sensor Fusion-Based Vehicle Detection and Tracking Using a Single Camera and Radar at a Traffic Inter-section. Sensors 2023, 23, 4888. [Google Scholar] [CrossRef]
- Hernandez-Penaloza, G.; Belmonte-Hernandez, A.; Quintana, M.; Alvarez, F. A Multi-Sensor Fusion Scheme to Increase Life Autonomy of Elderly People With Cognitive Problems. IEEE Access 2018, 6, 12775–12789. [Google Scholar] [CrossRef]
- Petković, D. Adaptive neuro-fuzzy fusion of sensor data. Infrared Phys. Technol. 2014, 67, 222–228. [Google Scholar] [CrossRef]
- Ilic, V.; Marijan, M.; Mehmed, A.; Antlanger, M. Development of Sensor Fusion Based ADAS Modules in Virtual Environments. In Proceedings of the 2018 Zooming Innovation in Consumer Technologies Conference (ZINC), Novi Sad, Serbia, 30–31 May 2018; Volume 5, pp. 88–91. [Google Scholar]
- He, L.; Wang, Y.; Shi, Q.; He, Z.; Wei, Y.; Wang, M. Multi-sensor Fusion Tracking Algorithm by Square Root Cubature Kalman Filter for Intelligent Vehicle. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021; Volume 6, pp. 1–4. [Google Scholar]
- Zhao, S.; Huang, Y.; Wang, K.; Chen, T. Multi-source data fusion method based on nearest neighbor plot and track data association. In Proceedings of the IEEE Sensors 2021, Sydney, NSW, Australia, 31 October–4 November 2021; Volume 7, pp. 1–4. [Google Scholar]
- Liu, Y.; Wang, Z.; Peng, L.; Xu, Q.; Li, K. A Detachable and Expansible Multisensor Data Fusion Model for Perception in Level 3 Autonomous Driving System. IEEE Trans. Intell. Transp. Syst. 2023, 24, 1814–1827. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | Direction | IMM-CKF | AIMM-ASCRKF |
|---|---|---|---|
| Position | x | 0.084 | 0.021 |
| y | 0.095 | 0.026 | |
| Velocity | vx | 0.135 | 0.036 |
| vy | 0.127 | 0.078 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, J. Study on Multi-Heterogeneous Sensor Data Fusion Method Based on Millimeter-Wave Radar and Camera. Sensors 2023, 23, 6044. https://doi.org/10.3390/s23136044
Duan J. Study on Multi-Heterogeneous Sensor Data Fusion Method Based on Millimeter-Wave Radar and Camera. Sensors. 2023; 23(13):6044. https://doi.org/10.3390/s23136044
Chicago/Turabian StyleDuan, Jianyu. 2023. "Study on Multi-Heterogeneous Sensor Data Fusion Method Based on Millimeter-Wave Radar and Camera" Sensors 23, no. 13: 6044. https://doi.org/10.3390/s23136044
APA StyleDuan, J. (2023). Study on Multi-Heterogeneous Sensor Data Fusion Method Based on Millimeter-Wave Radar and Camera. Sensors, 23(13), 6044. https://doi.org/10.3390/s23136044