Abstract
This paper proposes a Takagi–Sugeno (TS) fuzzy sliding mode observer (SMO) for simultaneous actuator and sensor fault reconstruction in a class of nonlinear systems subjected to unknown disturbances. First, the nonlinear system is represented by a TS fuzzy model with immeasurable premise variables. By filtering the output of the TS fuzzy model, an augmented system whose actuator fault is a combination of the original actuator and sensor faults is constructed. An performance criteria is considered to minimize the effect of the disturbance on the state estimations. Then, by using two further transformation matrices, a non-quadratic Lyapunov function (NQLF), and fmincon in MATLAB as a nonlinear optimization tool, the gains of the SMO are designed through the stability analysis of the observer. The main advantages of the proposed approach in comparison to the existing methods are using nonlinear optimization tools instead of linear matrix inequalities (LMIs), utilizing NQLF instead of simple quadratic Lyapunov functions (QLF), choosing SMO as the observer, which is robust to the uncertainties, and assuming that the premise variables are immeasurable. Finally, a practical continuous stirred tank reactor (CSTR) is considered as a nonlinear dynamic, and the numerical simulation results illustrate the superiority of the proposed approach compared to the existing methods.
1. Introduction
Over the past few decades, the reliability and safety of industrial systems has attracted considerable attention. As a consequence, fault-tolerant control (FTC) has received considerable attention in different fields [1,2]. There are different classifications for FTCs. In general, FTCs are classified into passive and active classifications. Active fault-tolerant controllers compensate for the effects of the occurred faults by using early information obtained from fault detection and isolation (FDI) schemes, which leads to a more flexible dynamic [3]. Consequently, FDI is becoming an attractive topic in different research fields. Observer-based methods are one of the most popular model-based FDIs. The main idea of observer-based FDIs is to construct a residual based on the measured output of the systems or to reconstruct the fault directly. Sliding mode observer (SMO) works based on the second approach, which detects the faults while determining the dynamic behavior [4,5]. SMOs are more insensitive to the unknown uncertainties occurring in the system compared to other observers like unknown input observers (UIOs) [6].
First, SMO observers were developed for linear dynamic systems; however, most actual physical systems are often nonlinear. Currently, lots of SMO-based fault reconstruction methods have been developed for uncertain nonlinear systems. In ref. [7], by considering a filter of the measured output vector, the original system with sensor and actuator faults is transformed into an augmented system with just the actuator fault and unknown inputs. Nevertheless, the classes of nonlinear systems considered in most of the papers are limited and cannot represent a general model for real systems [8,9].
Takagi–Sugeno (TS) fuzzy models can represent the behavior of nonlinear systems while keeping the simplicity of the linear models. A TS fuzzy representation is a convex nonlinear aggregation of several linear systems. Because the parameters of a TS fuzzy representation satisfy the convex sum, it is interesting to investigate the properties of the TS system based on its local linear vertices. With the advent of TS fuzzy systems, TS-based FDI techniques emerged to tackle a broader range of nonlinear systems [10]. By changing a nonlinear system to a TS system, some local linear systems are created, representing the behavior of the nonlinear system in a specific operating area. These local linear systems can be aggregated by using an interpolation mechanism. Thus, TS fuzzy models can represent the actual nonlinear behavior while maintaining the simplicity of linear models. Thus, an efficient FDI can be obtained by combining the SMO, which is robust to the uncertainties, and the TS fuzzy model, which causes simplicity in the design process. Recently, several researchers have utilized TS-based SMOs for fault detection and isolation in continuous-time and discrete-time systems [11,12]. However, in the methods developed in these articles, it is assumed that the premise variables are measurable, which reduces the applicability of these approaches. To deal with this problem, an FDI approach for stability analysis of the TS fuzzy systems with immeasurable premise variables was proposed in [13,14].
In [15], simultaneous actuator and sensor faults in a nonlinear system represented by a TS fuzzy model are reconstructed by using an SMO and considering performance criteria to reduce the effect of disturbance, whereas [16] does the same procedure for the fault reconstructions and both of the exogenous disturbance and the system faults are reconstructed. However, in refs. [15,16] quadratic Lyapunov functions (QLFs) are used to design the observers. By using the QLF for TS fuzzy systems with a large number of fuzzy rules can cause undesired performance or unfeasible solutions. Consequently, refs. [17,18] offered to use a non-quadratic Lyapunov function (NQLF) to design the TS-based SMO for the FDI purposes. In all these papers, a linear optimization approach based on linear matrix inequalities (LMIs) is utilized, making the stability analysis more complex and using some approximations and lemmas to prove the stability conditions.
In this paper, a TS fuzzy-based SMO with immeasurable premise variables is designed to reconstruct simultaneous actuator and sensor faults in a nonlinear system exposed to an unknown disturbance. Then, the states and faults are estimated. The stability of the proposed observer is guaranteed by using the NQLF and fmincon as a nonlinear optimization tool in MATLAB. In addition, performance criteria are considered to minimize the effect of disturbances and uncertainties on the estimation error and the fault estimations. By using the NQLF, a generalized eigenvalue problem is proposed, which maximizes the admissible Lipschitz constant and minimizes the disturbance effects on the estimation error through a nonlinear optimization problem.
The main advantages of the proposed approach over the existing methods can be summarized as follows:
- Using nonlinear optimization tools instead of LMIs, which results in better accuracy.
- Utilizing NQLF, which leads to less conservative optimization conditions than simple quadratic Lyapunov functions.
- Assuming that the premise variables are immeasurable, which makes the proposed method applicable to a broader class of TS fuzzy systems.
This paper is organized as follows. Section 2 presents a TS fuzzy model with simultaneous actuator and sensor faults and disturbance and how to construct a fictitious system with just an actuator fault. In Section 3, the main results of this paper, including the sliding mode observer design and the sufficient conditions of stability of the estimation errors, are proposed and guarantee the performance simultaneously. Section 4 discusses the procedure of the actuator and sensor fault reconstructions. In Section 5, simulation results are given, and comparisons are discussed. Finally, in Section 6, the concluding remarks are given.
2. Preliminaries
Assume that a continuous-time nonlinear system affected by actuator and sensor faults and disturbance is given as
where , , , , and are the state, input, output, unknown actuator, and sensor faults, and the system uncertainty vectors, respectively. and are nonlinear smooth functions. By using sector nonlinearity transformation, the nonlinear model (1) can be replaced by the following TS fuzzy model
Where and are known full rank matrices with appropriate dimensions. , , , and are real known matrices, represents the number of fuzzy rules and are the fuzzy membership functions depending on the unmeasurable variable vector and satisfy the following so-called convex sum property
In the rest of the paper, is dropped from the equations, , and denote , , and and the mark denotes the transposed element in a symmetric matrix.
To build a system with just an actuator fault and then use the actuator fault reconstruction concepts, the output is passed through an orthogonal matrix and an augmented TS system of order can be obtained as
where , , and
is an arbitrary stable matrix, and . can be obtained by QR reduction of the matrix .
By defining
where is the estimation of the , the TS system (4) can be derived as
Moreover, the nonlinear term is assumed to satisfy the Lipschitz condition as
To design a sliding mode observer, some assumptions and lemmas are needed as follows.
Assumption 1.
Assumption 2.
Assumption 3.
for allsatisfyingholds.
Lemma 1.
- (a)
- If Assumptions 1 and 2 are satisfied, then there exist changes of coordinatessuch thatwhere,,, andis an orthogonal matrix. Matrices,can have the following structure:With,are nonsingular.
- (b)
- The pairs () are detectable if and only if the invariant zeros of {} lie inand it happens if and only if Assumption 3 is satisfied.
Assumption 4.
The unknown vectorsandand the derivatives of theforare assumed to be norm bounded by some known constants. Therefore,
Lemma 2.
Ref. [19] parameterized linear matrix inequality (PLMI) is fulfilled if the following conditions hold:
3. TS Fuzzy-Based Sliding Mode Observer Design
The proposed TS sliding mode observer for the nonlinear system (2) in the new coordinate (10) is as follows:
where and are design matrices of the observer that will be derived through Theorem 1. represents the output error estimation, and are the equivalent output error injections that are used to compensate the errors due to the actuator fault and sensor fault, respectively, and have the following structure:
where and are two positive scalars such that
and are two arbitrary positive constants.
The observer (16) guarantees that the state estimation error converges to a pre-designed sliding surface in finite time and then, asymptotically to zero. Define state estimation error as . By subtracting the observer dynamics from the system dynamic (7) in the new coordinate (12), the state estimation error dynamic can be given as
By partitioning as and applying a further change of coordinates
where is a stabilizing gain matrix, it is straightforward to see that
where are arbitrary stable design matrices. Through the new coordinate, the error dynamic (19) can be re-written as
where
The goal is to design the matrices such that the asymptotic stability of (22) is assured while the following specified performance is guaranteed:
The following theorem provides sufficient conditions to ensure asymptotic stability of the state estimation error (22) with maximized admissible Lipschitz constant in (8) and minimized performance gain in (24).
Theorem 1.
If there exist feasible solutions for the following optimization problem with a fixed scalar
where
andrepresents eigenvalues of a matrix, then, the estimation error (22) is asymptotically stable with the maximized admissible Lipschitz constant and the derived matrices can be used for the purpose of simultaneous fault reconstruction.
Proof.
The proof of this theorem is done by using a positive NQLF as follows
where with and are symmetric positive definite matrices. The time derivative of the candidate Lyapunov function along the trajectory (22) is given by
From (14), (17), (18) and (21), one has:
From (14), one has
By considering the fact that with and using (8), one obtains
where . By Substituting (29)–(31) into (28), one has
By defining parameter and the cost function as , one has
where . By placing (23)in (33) and considering the diagonal structure of , the inequality (33) is continued as
where
Based on the Congruence [20], the inequality (35) is satisfied by
By utilizing Lemma 2, the summations and the fuzzy membership functions will be omitted from inequalities (36). Finally, the results are going to be used for fmincon function which is a nonlinear optimization tool in MATLAB software and finds the minimum of a problem specified by
The matrix inequalities (36) should be changed to some one-dimensional inequalities, and the optimization problem can be defined as (25) and (26). In addition, from the and found by the optimization problem, the maximum admissible Lipschitz constant and the minimum can be calculated as
□
4. Simultaneous Fault Reconstruction
In Section 3, an sliding mode observer is designed in which two discontinuous terms (19) are considered to reconstruct simultaneous faults in the presence of an unknown disturbance based on the measured signals and . Along the sliding surface . Consequently, (22) on the sliding surface changes to
where and are approximations of the equivalent output error injection terms (17) required to maintain the sliding motion and can be defined as
where and are small positive constants. Consequently, (40) leads to
On the other hand, using (8) and (24) can show that the term is bounded as
where . Therefore, for small values of , the actuator and sensor faults can be estimated as
where shows the pseudo-inverse of a matrix.
Remark 1.
The numerical solution of Theorem 1 can be summarized as follows:
- Find theorthogonal transfer matrix by using the QR reduction of matrix and obtain the augmented TS system(4).
- Find the changes of coordinatesand obtain the system matrices in the format(12) and(13).
- Compute the scalars,, andand also the matricesusing the fmincon function in MATLAB software and solving the nonlinear optimization problem(25).
- Compute the maximized admissible Lipschitz constant as.
- Reconstruct the sensor and actuator faults using Equations(43) and(44).
5. Numerical Example
In this section, a three-state variable continuous stirred tank reactor (CSTR) system is utilized to show the effectiveness of the proposed sliding mode observer in both actuator and sensor faults reconstruction in the presence of an unknown disturbance. To show the performance improvement of the proposed approach, the obtained results are compared to the LMI approach presented in ref. [17].
Consider a well-mixed variable CSTR in which a multi-component chemical reaction A ⇌ B → C is being carried out. The nonlinear dynamics of the CSTR is given by the following model [21],
where and the states represent the concentrations of the species , and , respectively. To check the advantage of the proposed method, two faults and a disturbance are added to the dynamic (45) as
It is supposed that the concentration of is dimensionless, which means that . Consequently, by using TS rules, two membership functions can be defined as
Therefore, the local linear TS matrices can be determined as
The TS fuzzy system matrices satisfy all the assumptions; therefore, the TS fuzzy sliding observer (16) can be designed.
For simulation, the parameters and input signal are chosen as , , , , , and . and the initial conditions are chosen as and . Moreover, the disturbance is chosen as and the shape is shown in Figure 1.
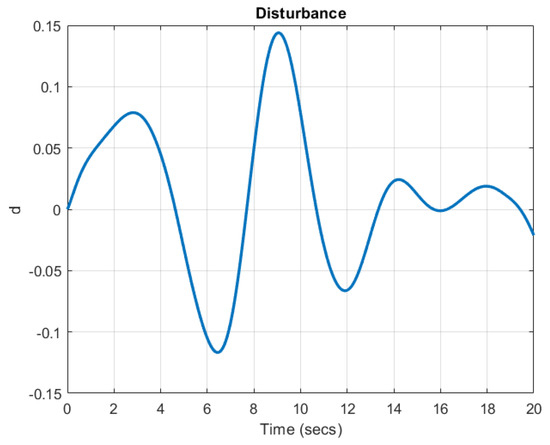
Figure 1.
Disturbance d(t).
The maximum Lipschitz constant and the minimum performance gain obtained through fmincon function in MATLAB on Theorem 1 are and . The observer matrices are derived as
It should be noted that the initial point for fmincon is chosen based on the results of the related published papers. Figure 2 shows the state estimation error which converges to a neighborhood close to zero due to the unknown disturbance.
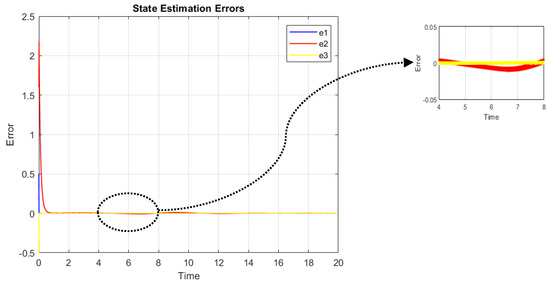
Figure 2.
State estimation error in the presence of faults and disturbance.
Figure 3 and Figure 4 show that the proposed TS-based SMO is able to reconstruct the simultaneous faults with a small error in the presence of an unknown disturbance.
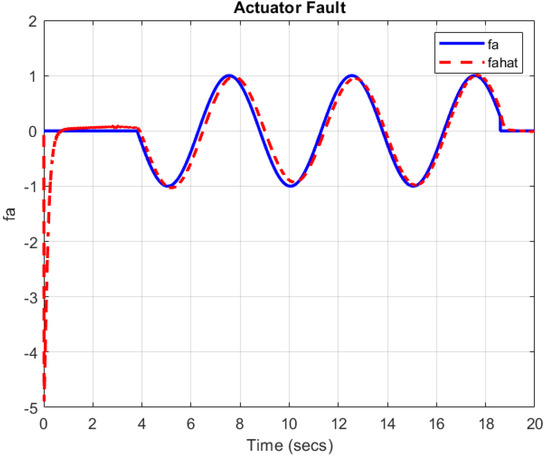
Figure 3.
Actuator fault (by blue solid line) and its estimation (by red dashed line).
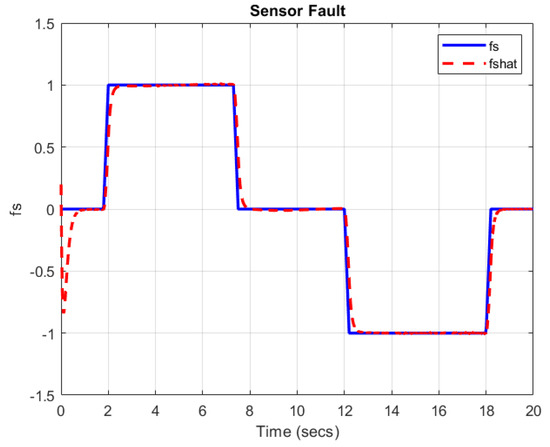
Figure 4.
Sensor fault (by blue solid line) and its estimation (by red dashed line).
The proposed approach is compared with another non-quadratic Lyapunov-based approach using linear optimization analysis based on LMIs [17]. Figure 5 describes the fault estimation errors using both approaches.
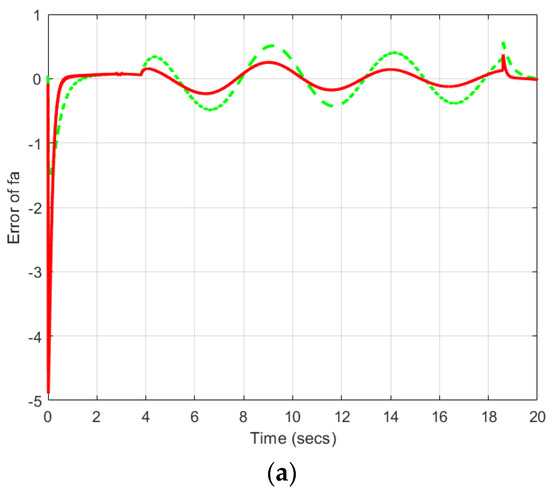
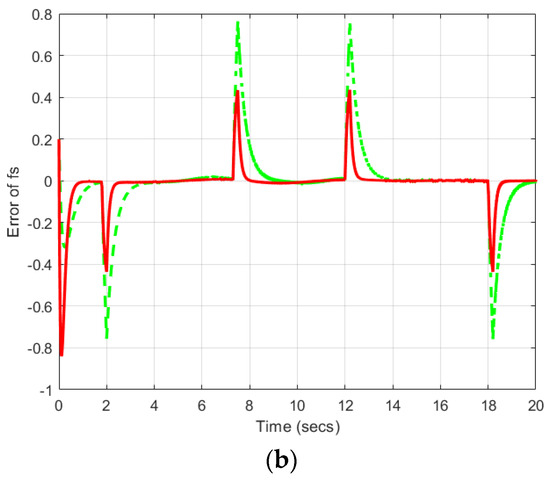
Figure 5.
Fault estimation errors (a). Actuator fault, (b). Sensor fault (the proposed approach by red solid line and ref. [17] by green dashed line).
As can be seen, the proposed nonlinear approach is less conservative and can estimate both actuator and sensor faults with smaller errors. In addition, the proposed approach has less computational burden. In Table 1, a quantitative comparison between the proposed approach and the LMI approach presented in ref. [17] is considered. In this table, the Euclidean and infinity norms of the fault error estimations are compared and the improvements are calculated as
where and represent the using the LMI approach [17] and the nonlinear proposed approach, respectively.

Table 1.
The norm specifications of the fault reconstruction errors for two different approaches.
As can be seen in Table 1, the proposed approach improves the fault estimation accuracies by more than 30%.
6. Discussion
In this paper, a nonlinear optimization approach for simultaneous actuator and sensor fault reconstruction in nonlinear systems subjected to unknown disturbances was proposed. First, an augmented system with just an actuator fault was created. Then, by using the fuzzy Lyapunov stability analysis and two changes of coordinates, the parameters of a sliding mode observer were designed through a nonlinear optimization problem while maximizing the Lipschitz constant and minimizing the performance index. The optimization problem was solved by using fmincon in MATLAB as a nonlinear optimization tool. By utilizing the optimum points, both actuator and sensor faults were reconstructed properly. Finally, the simulation results showed a considerable increase in the fault reconstruction accuracy with constraints with smaller dimensions.
Author Contributions
Conceptualization, S.A.; methodology, S.A., M.M., and G.G.W.; software, S.A.; validation, S.A., M.M.; formal analysis, S.A.; investigation, S.A.; resources, S.A.; writing—original draft preparation, S.A. and G.G.W.; writing—review and editing, S.A. and M.M.; visualization, S.A. and M.M.; supervision, M.M. and G.G.W.; project administration, M.M. and G.G.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhang, Z.; Hu, Y.; Luo, G.; Gong, C.; Liu, X.; Chen, S. An Embedded Fault-Tolerant Control Method for Single Open-Switch Faults in Standard PMSM Drives. IEEE Trans. Power Electron. 2022, 37, 8476–8487. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; Sergeant, P. An Enhanced Fault-Tolerant Control of a Five-Phase Synchronous Reluctance Motor Fed from a Three-to-Five-Phase Matrix Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 4182–4194. [Google Scholar] [CrossRef]
- Alwi, H.; Edwards, C.; Tan, C.P. Fault Detection and Fault-Tolerant Control Using Sliding Modes; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Falcon, R.; Rios, H.; Dzul, A. A Robust Fault Diagnosis for Quad-Rotors: A Sliding-Mode Observer Approach. IEEE/ASME Trans. Mechatron. 2022, 1–10. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, B.; Yan, X.-G.; Mao, Z. Incipient Fault Detection for Traction Motors of High-Speed Railways Using an Interval Sliding Mode Observer. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2703–2714. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, B.; Shi, P.; Cocquempot, V. Observer-Based Fault Estimation Techniques; Springer International Publishing: Cham, Switzerland, 2018; Volume 127. [Google Scholar] [CrossRef]
- Yang, J.; Zhu, F.; Wang, X.; Bu, X. Robust sliding-mode observer-based sensor fault estimation, actuator fault detection and isolation for uncertain nonlinear systems. Int. J. Control Autom. Syst. 2015, 13, 1037–1046. [Google Scholar] [CrossRef]
- Nguyen, V.-C.; Vo, A.-T.; Kang, H.-J. A Non-Singular Fast Terminal Sliding Mode Control Based on Third-Order Sliding Mode Observer for a Class of Second-Order Uncertain Nonlinear Systems and its Application to Robot Manipulators. IEEE Access 2020, 8, 78109–78120. [Google Scholar] [CrossRef]
- Ziyabari, H.S.; Shoorehdeli, M.A. Fuzzy robust fault estimation scheme for a class of nonlinear systems based on an unknown input sliding mode observer. J. Vib. Control 2018, 24, 1861–1873. [Google Scholar] [CrossRef]
- Gu, Z.; Yue, D.; Park, J.H.; Xie, X. Memory-Event-Triggered Fault Detection of Networked IT2 T-S Fuzzy Systems. IEEE Trans. Cybern. 2022, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Wang, H.; Aitouche, A.; Christov, N. Sliding mode observer design for fault and disturbance estimation using Takagi–Sugeno model. Eur. J. Control 2018, 44, 114–122. [Google Scholar] [CrossRef]
- Asadi, S.; Khayatian, A.; Dehghani, M.; Vafamand, N. Simultaneous fault reconstruction of TS fuzzy systems using robust sliding mode observer and non-quadratic stability analysis. In Proceedings of the 2017 Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 2–4 May 2017; pp. 823–828. [Google Scholar] [CrossRef]
- Salem, A.; Kardous, Z.; Braiek, N.B.; Ragot, J. On the state observer based stabilization of Takagi-Sugeno systems with immeasurable premise variables. Int. J. Control Autom. Syst. 2012, 10, 1153–1163. [Google Scholar] [CrossRef]
- Gómez-Peñate, S.; Valencia-Palomo, G.; López-Estrada, F.; Astorga-Zaragoza, C.; Osornio-Rios, A.R.; Ruiz, I.D.L.S. Sensor Fault Diagnosis Based on a Sliding Mode and Unknown Input Observer for Takagi-Sugeno Systems with Uncertain Premise Variables. Asian J. Control 2019, 21, 339–353. [Google Scholar] [CrossRef]
- Ben Brahim, A.; Dhahri, S.; Ben Hmida, F.; Sellami, A. An H∞ sliding mode observer for Takagi–Sugeno nonlinear systems with simultaneous actuator and sensor faults. Int. J. Appl. Math. Comput. Sci. 2015, 25, 547–559. [Google Scholar] [CrossRef]
- Ben Brahim, A.; Dhahri, S.; BEN Hmida, F.; Sellami, A. Simultaneous Actuator and Sensor Faults Reconstruction Based on Robust Sliding Mode Observer for a Class of Nonlinear Systems. Asian J. Control 2017, 19, 362–371. [Google Scholar] [CrossRef]
- Asadi, S.; Khayatian, A.; Dehghani, M.; Vafamand, N.; Khooban, M.H. Robust sliding mode observer design for simultaneous fault reconstruction in perturbed Takagi-Sugeno fuzzy systems using non-quadratic stability analysis. J. Vib. Control 2020, 26, 1092–1105. [Google Scholar] [CrossRef]
- Asadi, S.; Vafamand, N.; Moallem, M.; Dragicevic, T. Fault Reconstruction of Islanded Nonlinear DC Microgrids: An LPV-Based Sliding Mode Observer Approach. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 4606–4614. [Google Scholar] [CrossRef]
- Vafamand, N.; Asemani, M.H.; Khayatiyan, A. A robust L1 controller design for continuous-time TS systems with persistent bounded disturbance and actuator saturation. Eng. Appl. Artif. Intell. 2016, 56, 212–221. [Google Scholar] [CrossRef]
- Scherer, C.; Weiland, S. Linear matrix inequalities in control. In Lecture Notes; Dutch Institute for Systems and Control: Delft, The Netherlands, 2000; Volume 3. [Google Scholar]
- Vafamand, N.; Khayatian, A. Model predictive-based reset gain-scheduling dynamic control law for polytopic LPV systems. ISA Trans. 2018, 81, 132–140. [Google Scholar] [CrossRef] [PubMed]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).