
Fuzzy Logic-Based Adaptive Droop Control Designed with Feasible Range of Droop Coefficients for Enhanced Power Delivery in Microgrids †

 ,
,  and
and 
Abstract
1. Introduction
2. Proposed Methodology
2.1. Identification of Feasible Range of Droop Coefficients
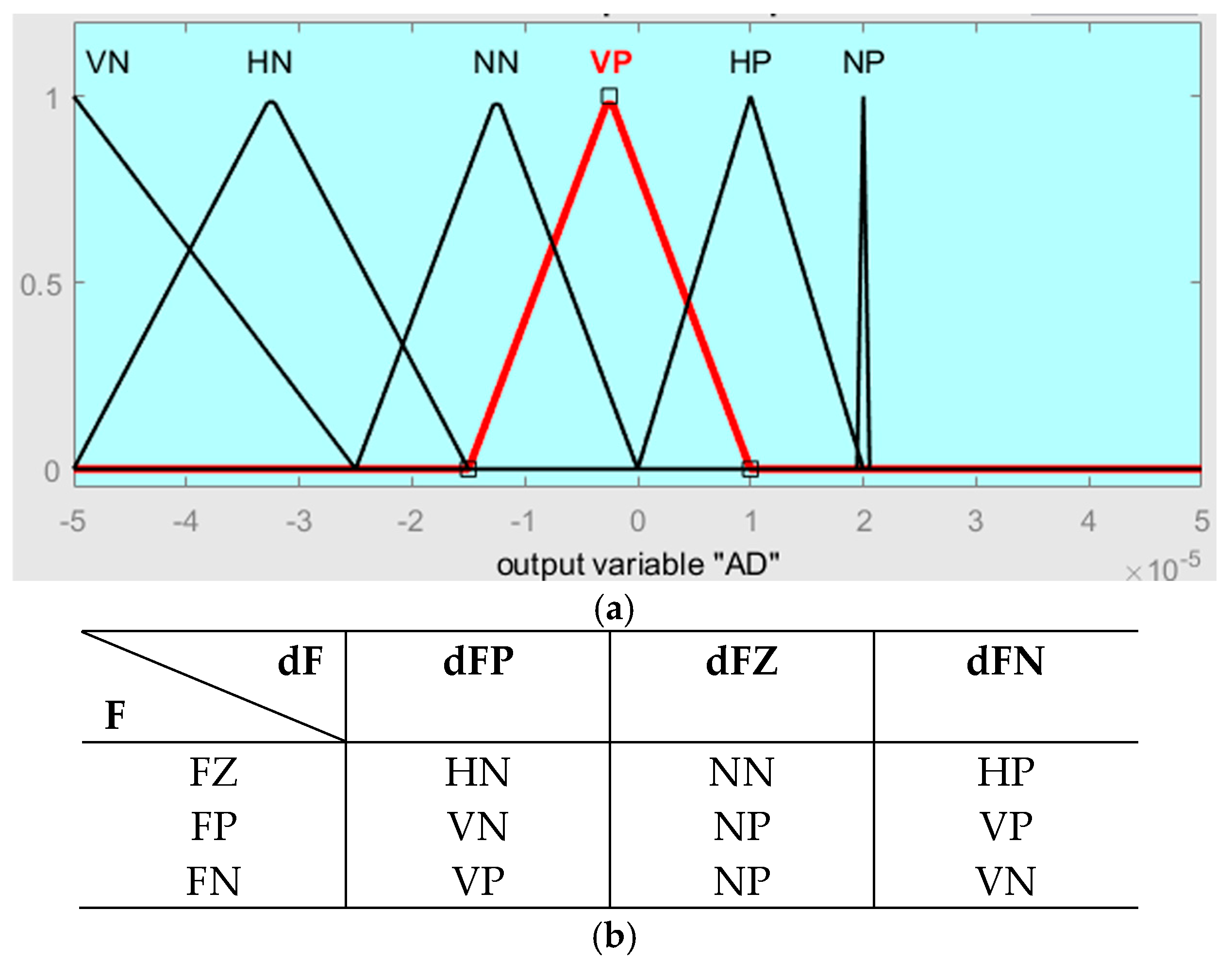
2.2. Proposed Improved Fuzzy Logic-Based Droop Control
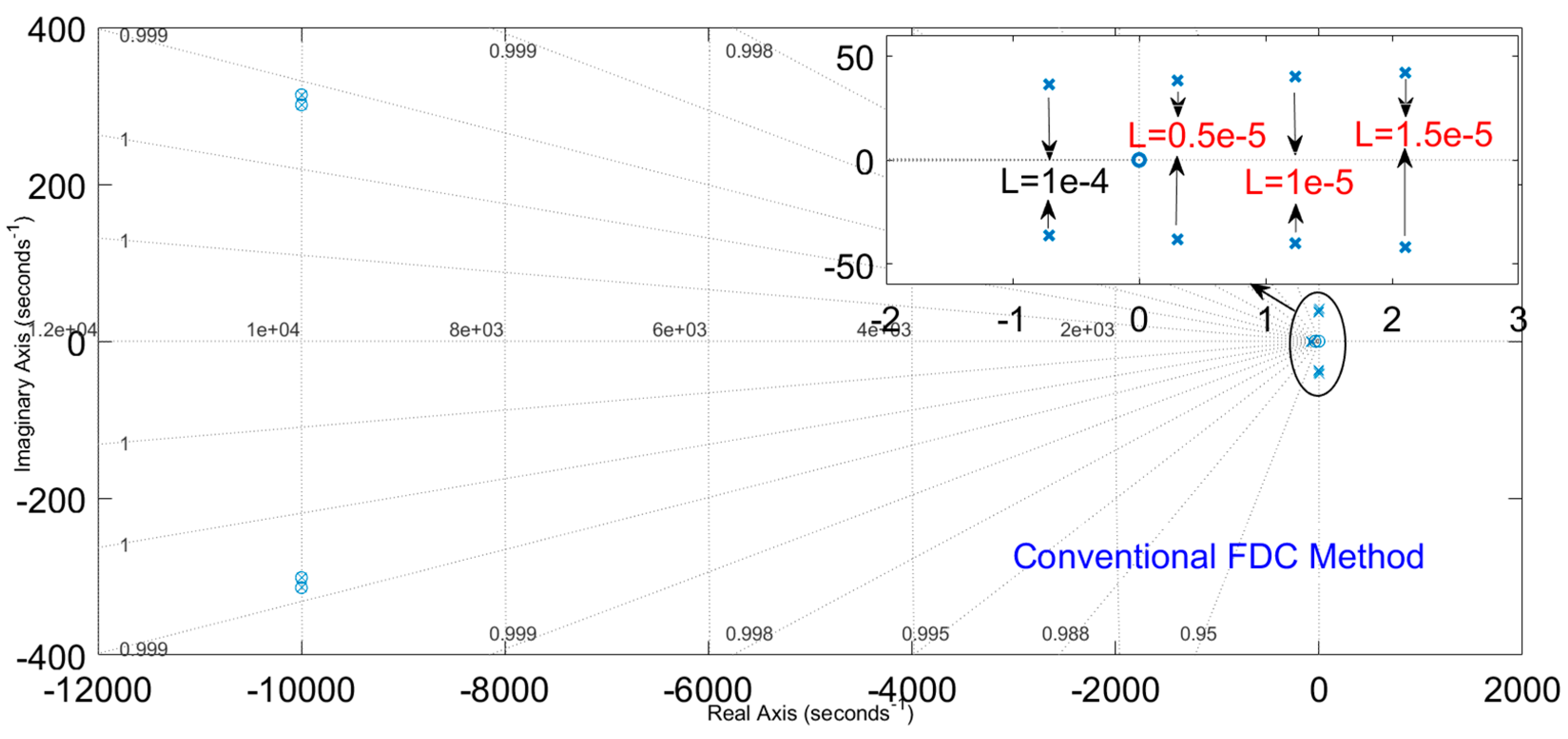
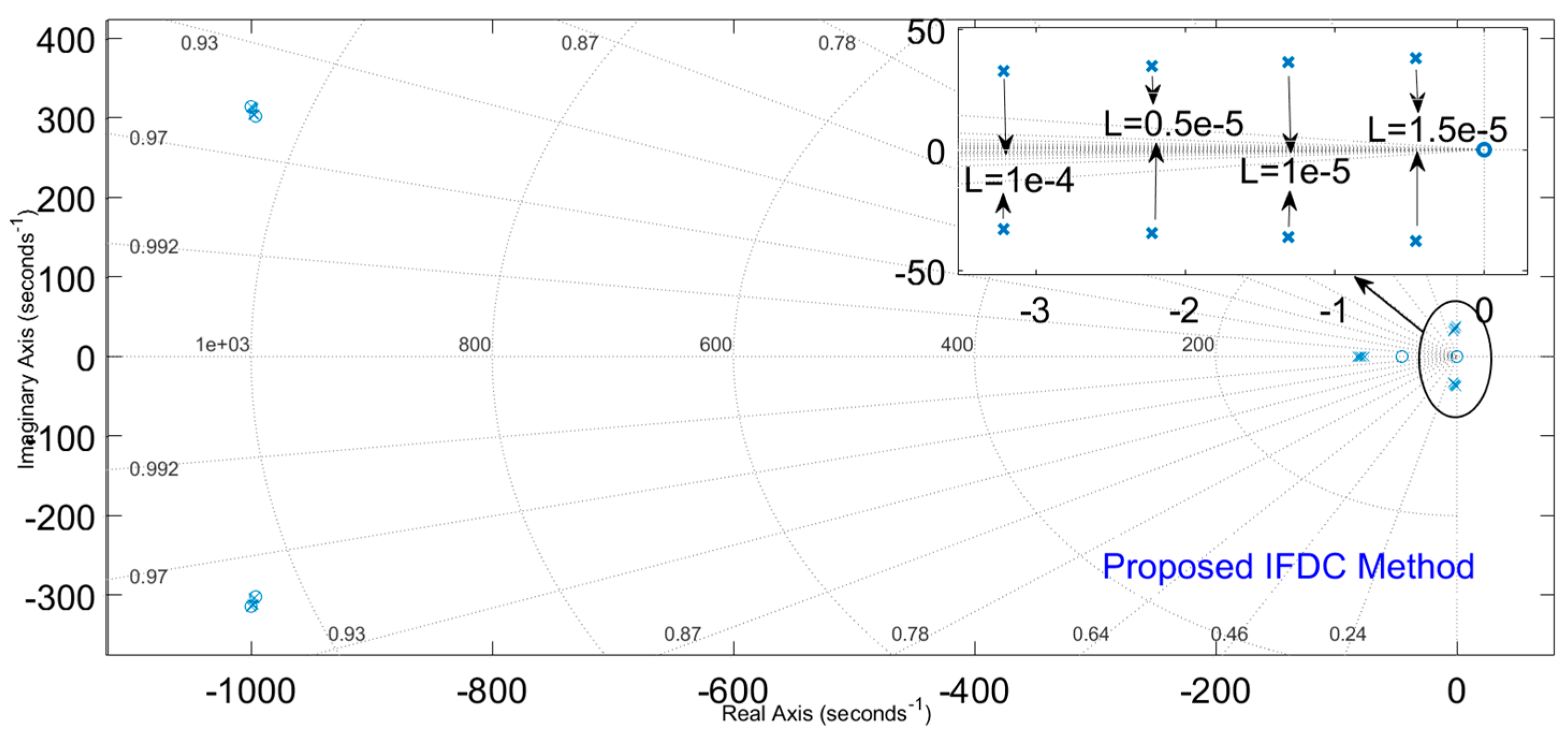
2.3. Small-Signal Stability Analysis
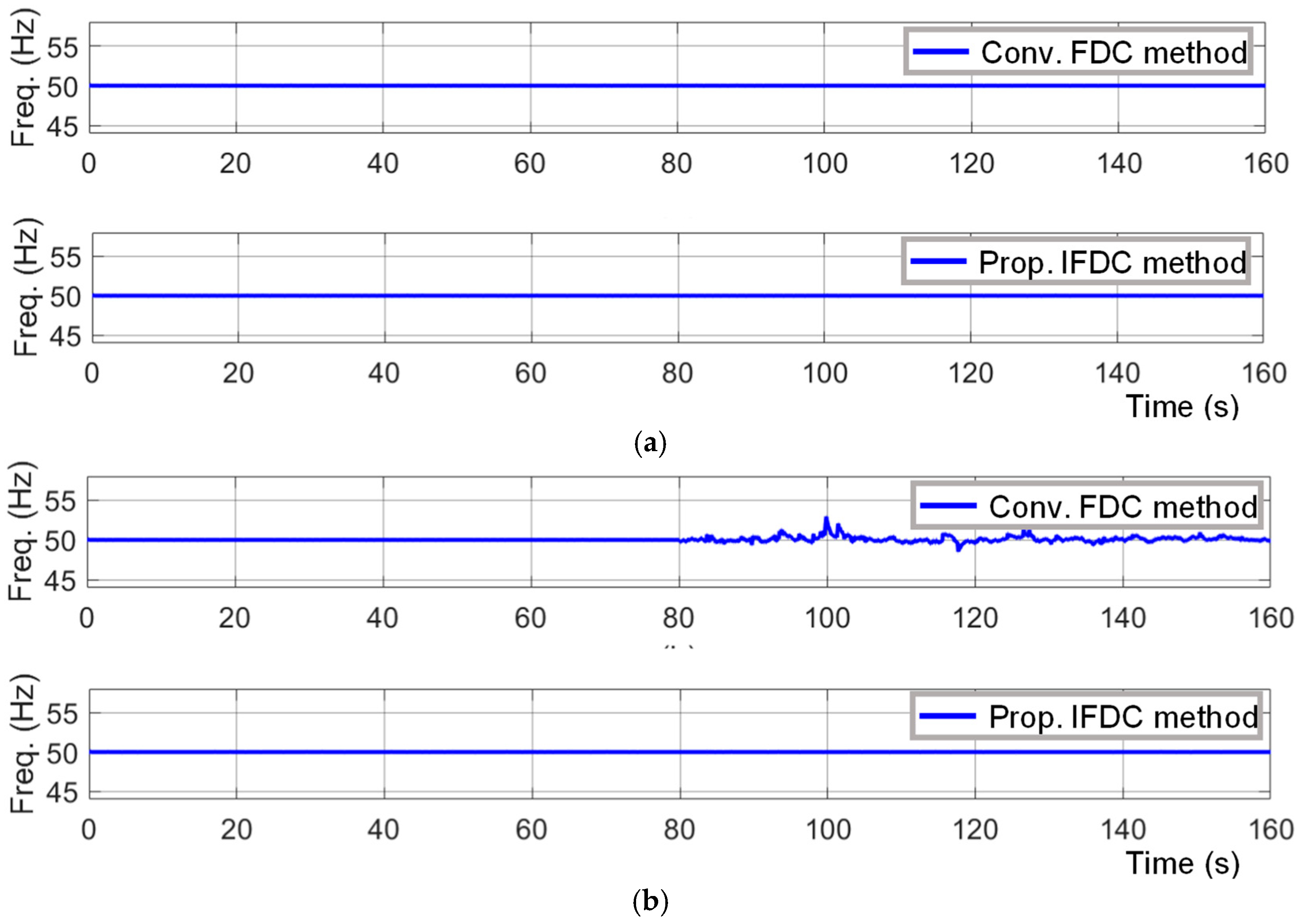
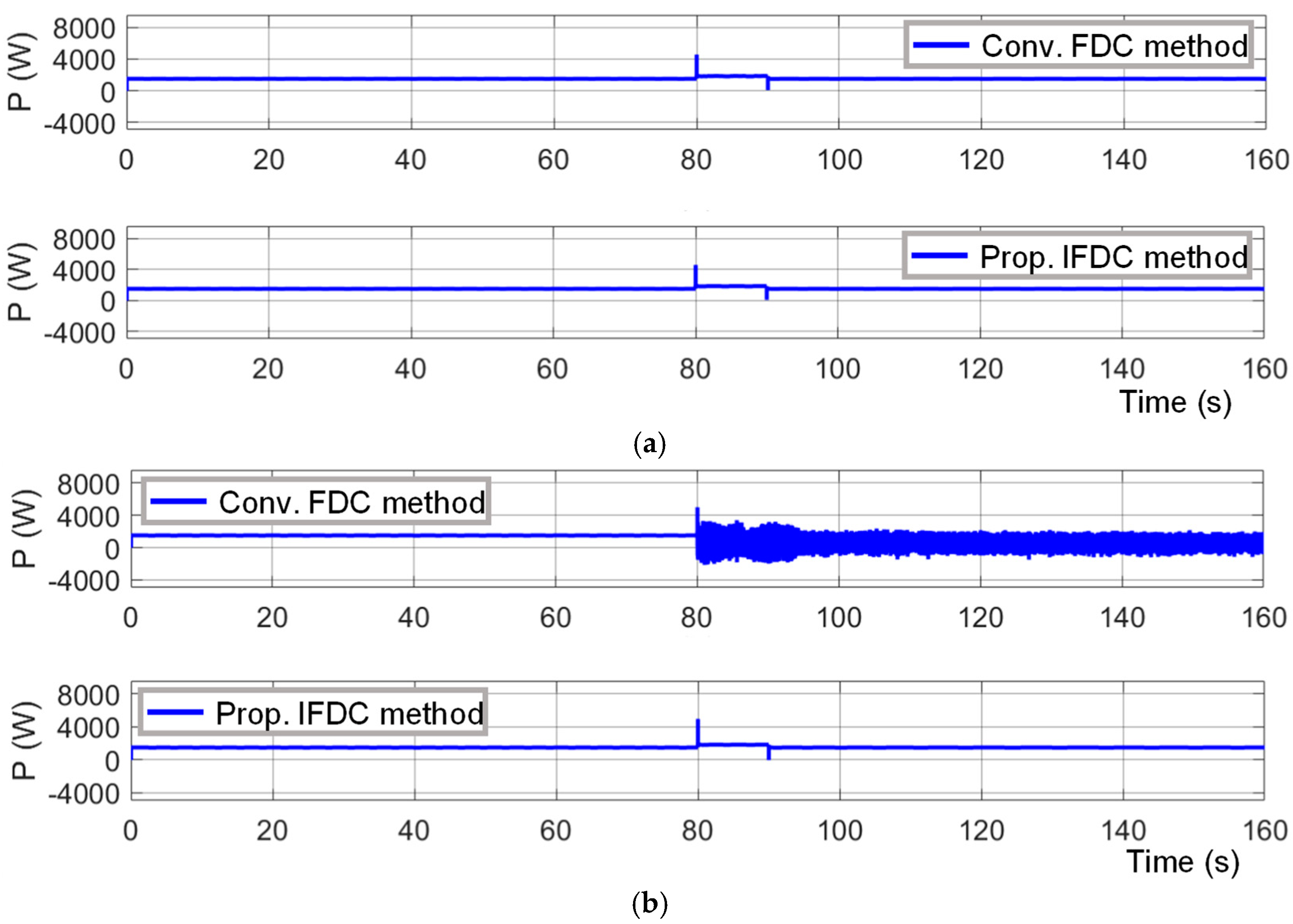
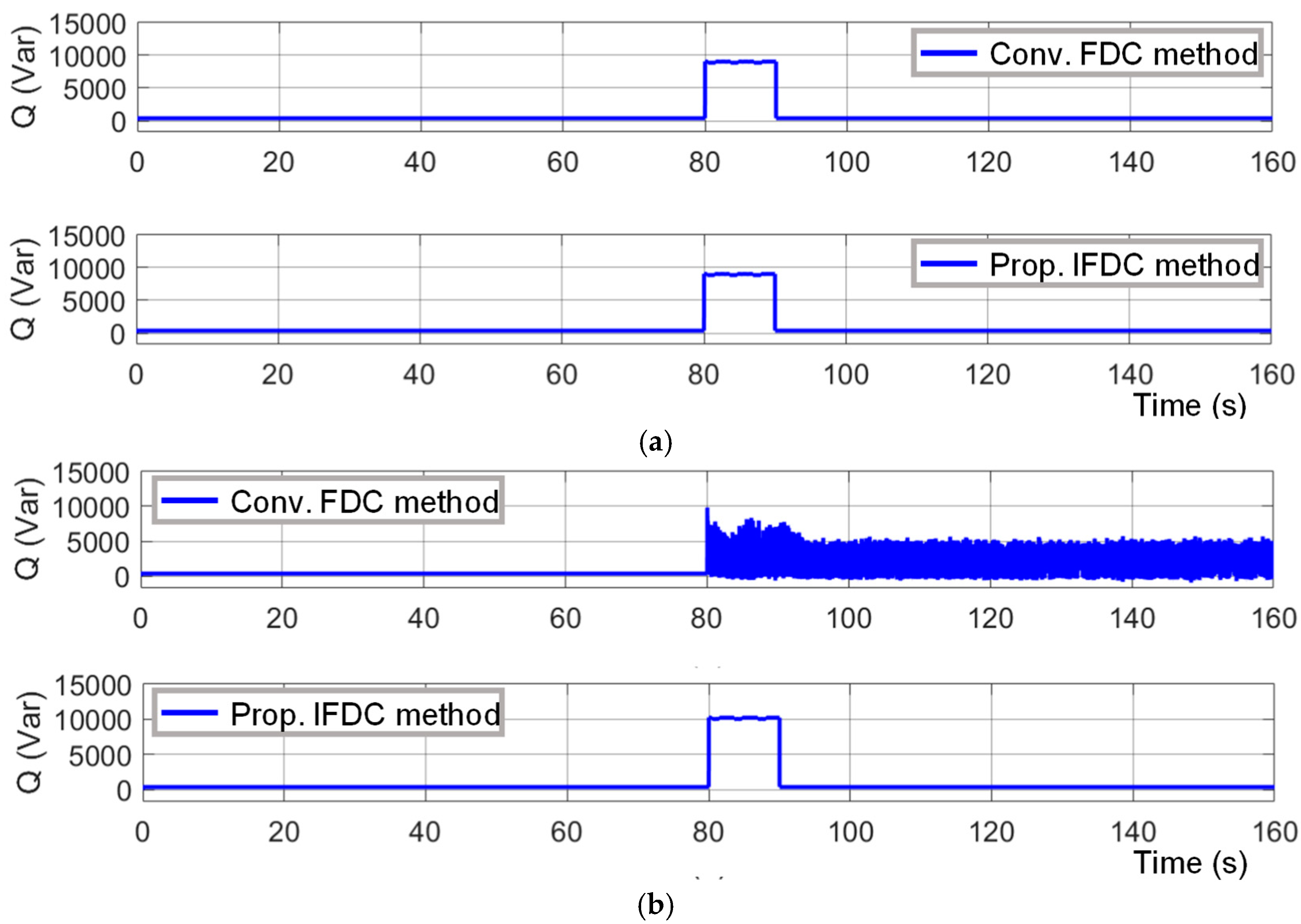
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Junior, R.S.R.; Machado, E.P.; Júnior, D.F. Development of a multivariable deadbeat controller in dq coordinates for the current loop of a grid-connected VSI. J. Control Autom. Electr. Syst. 2024, 35, 588–600. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of Dynamic Characteristics Between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Srikanth, M.; Kumar, Y.V.P. Improved Virtual Synchronous Generator-Based Control Scheme for Enhanced Transient Response in Microgrids. Eng. Proc. 2023, 56, 4. [Google Scholar] [CrossRef]
- Xiao, Z.-X.; Fang, H.-W. Impacts of P-f & Q-V Droop Control on MicroGrids Transient Stability. Phys. Procedia 2012, 24, 276–282. [Google Scholar]
- Meng, X.; Liu, J.; Liu, Z. A Generalized Droop Control for Grid-Supporting Inverter Based on Comparison Between Traditional Droop Control and Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2019, 34, 5416–5438. [Google Scholar] [CrossRef]
- Srikanth, M.; Kumar, Y.V.P.; Amir, M.; Mishra, S.; Iqbal, A. Improvement of Transient Performance in Microgrids: Comprehensive Review on Approaches and Methods for Converter Control and Route of Grid Stability. IEEE Open J. Ind. Electron. Soc. 2023, 4, 534–572. [Google Scholar] [CrossRef]
- Soni, N.; Doolla, S.; Chandorkar, M.C. Improvement of Transient Response in Microgrids Using Virtual Inertia. IEEE Trans. Power Deliv. 2013, 28, 1830–1838. [Google Scholar] [CrossRef]
- Srikanth, M.; Venkata Pavan Kumar, Y.A. State Machine-Based Droop Control Method Aided with Droop Coefficients Tuning through In-Feasible Range Detection for Improved Transient Performance of Microgrids. Symmetry 2023, 15, 1. [Google Scholar] [CrossRef]
- Yadav, M.; Jaiswal, P.; Singh, N. Fuzzy Logic-Based Droop Controller for Parallel Inverter in Autonomous Microgrid Using Vectored Controlled Feed-Forward for Unequal Impedance. J. Inst. Eng. India Ser. B 2021, 102, 691–705. [Google Scholar] [CrossRef]
- Dehkordi, N.M.; Sadati, N.; Hamzeh, M. Robust Tuning of Transient Droop Gains Based on Kharitonov’s Stability Theorem in Droop-controlled Microgrids. IET Gener. Transm. Distrib. 2018, 12, 3495–3501. [Google Scholar] [CrossRef]
- Kumar, Y.V.P.; Bhimasingu, R. Fuzzy Logic Based Adaptive Virtual Inertia in Droop Control Operation of the Microgrid for Improved Transient Response. In Proceedings of the 2017 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Bangalore, India, 8–10 November 2017; pp. 1–6. [Google Scholar]
- Tan, J.; Liu, W.; Zhao, X. Adaptive Sliding Mode Control Based on Fuzzy Logic for Hybrid Smart Microgrid Energy Systems under Uncertainty. Int. J. Energy Res. 2023, 47, 98–115. [Google Scholar]
- Zhang, Y.; Li, H.; Wang, S. Integral Sliding Mode Control Combined with Fuzzy Adaptive PI Control for Voltage Stability in DC Microgrids. Front. Energy Res. 2023, 11, 1278305. [Google Scholar]
- Liu, D.; Li, Q.; Zhang, L. Robust Frequency Control for Islanded Microgrids Using Sliding Mode Control with Linear Matrix Inequality (LMI) Techniques. Energy Syst. 2024, 15, 1539–1556. [Google Scholar]
- Std 1547-2018; IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces (Revision of IEEE Std 1547-2003). IEEE: Piscataway, NJ, USA, 2018; pp. 1–138. [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | MF | Description | Range | Compensation | Description | Range |
|---|---|---|---|---|---|---|
| F | FP | Positive frequency range | (50)–(50.3)–(50.6) | VP | Very positive compensation | (−1.5e−5)–(−0.25e−5)–(1) |
| FZ | Zero frequency range | (49.7)–(50)–(50.3) | HP | High positive compensation | (0)–(1e−5)–(2e−5) | |
| FN | Negative frequency range | (49.4)–(49.7)–(50) | NP | Normal positive compensation | (2e−5) | |
| dF | dFP | Positive range of frequency derivative | (0)–(0.5)–(1) | VN | Very negative compensation | (−2.5e−5)–(−1.25e−5)–(0) |
| dFZ | Zero range of frequency derivative | (−0.5)–(0)–(0.5) | HN | High negative compensation | (−5e−5)–(−3.75e−5)–(−1.5e−5) | |
| dFN | Negative range of frequency derivative | (−1)–(−0.5)–(0) | NN | Normal negative compensation | (−5e−5)–(−5e−5)–(−2.5e−5) |
| Variable | Conventional FDC Method [9,11] | Proposed IFDC Method | Superior Method | ||
|---|---|---|---|---|---|
| T1 | T2 | T1 | T2 | ||
| Frequency (Hz) | Stable | Unstable | Stable | Stable | IFDC method |
| Voltage magnitude (V) | Stable | Unstable | Stable | Stable | IFDC method |
| Active power (W) | Stable | Fail | Stable | Stable | IFDC method |
| Reactive power (VAr) | Stable | Fail | Stable | Stable | IFDC method |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Srikanth, M.; Kumar, Y.V.P.; Rao, S.N.V.B. Fuzzy Logic-Based Adaptive Droop Control Designed with Feasible Range of Droop Coefficients for Enhanced Power Delivery in Microgrids. Eng. Proc. 2025, 87, 56. https://doi.org/10.3390/engproc2025087056
Srikanth M, Kumar YVP, Rao SNVB. Fuzzy Logic-Based Adaptive Droop Control Designed with Feasible Range of Droop Coefficients for Enhanced Power Delivery in Microgrids. Engineering Proceedings. 2025; 87(1):56. https://doi.org/10.3390/engproc2025087056
Chicago/Turabian StyleSrikanth, Mandarapu, Yellapragada Venkata Pavan Kumar, and Sivakavi Naga Venkata Bramareswara Rao. 2025. "Fuzzy Logic-Based Adaptive Droop Control Designed with Feasible Range of Droop Coefficients for Enhanced Power Delivery in Microgrids" Engineering Proceedings 87, no. 1: 56. https://doi.org/10.3390/engproc2025087056
APA StyleSrikanth, M., Kumar, Y. V. P., & Rao, S. N. V. B. (2025). Fuzzy Logic-Based Adaptive Droop Control Designed with Feasible Range of Droop Coefficients for Enhanced Power Delivery in Microgrids. Engineering Proceedings, 87(1), 56. https://doi.org/10.3390/engproc2025087056