

Cascade Control for Two-Axis Position Mechatronic Systems





Abstract
1. Introduction
1.1. Literature Review
1.2. Contributions
- (i)
- To include the parametric uncertainties of a two-axis mechatronic positional system into the LMI-based control problem in order to impose a -region where the poles are real and under a prescribed value, by converting the linear differential inclusion (LDI) into a polytopic LDI (PLDI), against the initial method proposed in [25], where the problem has been formulated for the nominal model of a single axis positional system;
- (ii)
- To reduce the size of the resulting LMI-based control problem by converting the PLDI into a diagonal norm-bound LDI (DNLDI), and to include the constraints given by the saturation phenomenon which appears on the command signal, which has not been considered in the previous paper even for the case of nominal system;
- (iii)
- To impose a specific structure on the LMI variables such that the resulting state-feedback can be converted into a cascade control structure for both axes, using a similar idea as in [25] for a single axis;
- (iv)
- To present an autotuning-type design procedure for a fractional-order integral-derivative controller by considering a relay-type nonlinearity to force a limit cycle to obtain the value of the gain-crossover frequency, and then to impose the desired phase margin, by extending the idea from [17];
- (v)
- To perform a set of numerical simulations to compare the performance obtained with the proposed methods in terms of quantifiable metrics, such as settling time, rise time and overshoot, robustness and implementability.
1.3. Paper Structure
2. State Feedback Controller
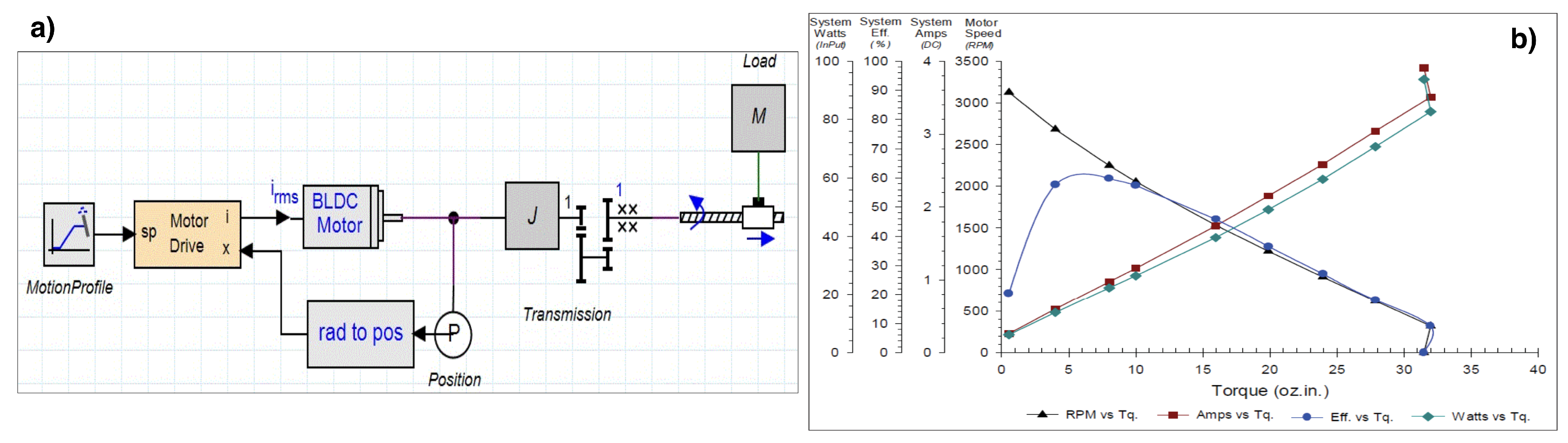
3. Position-Based Mechatronic System
3.1. Plant Model
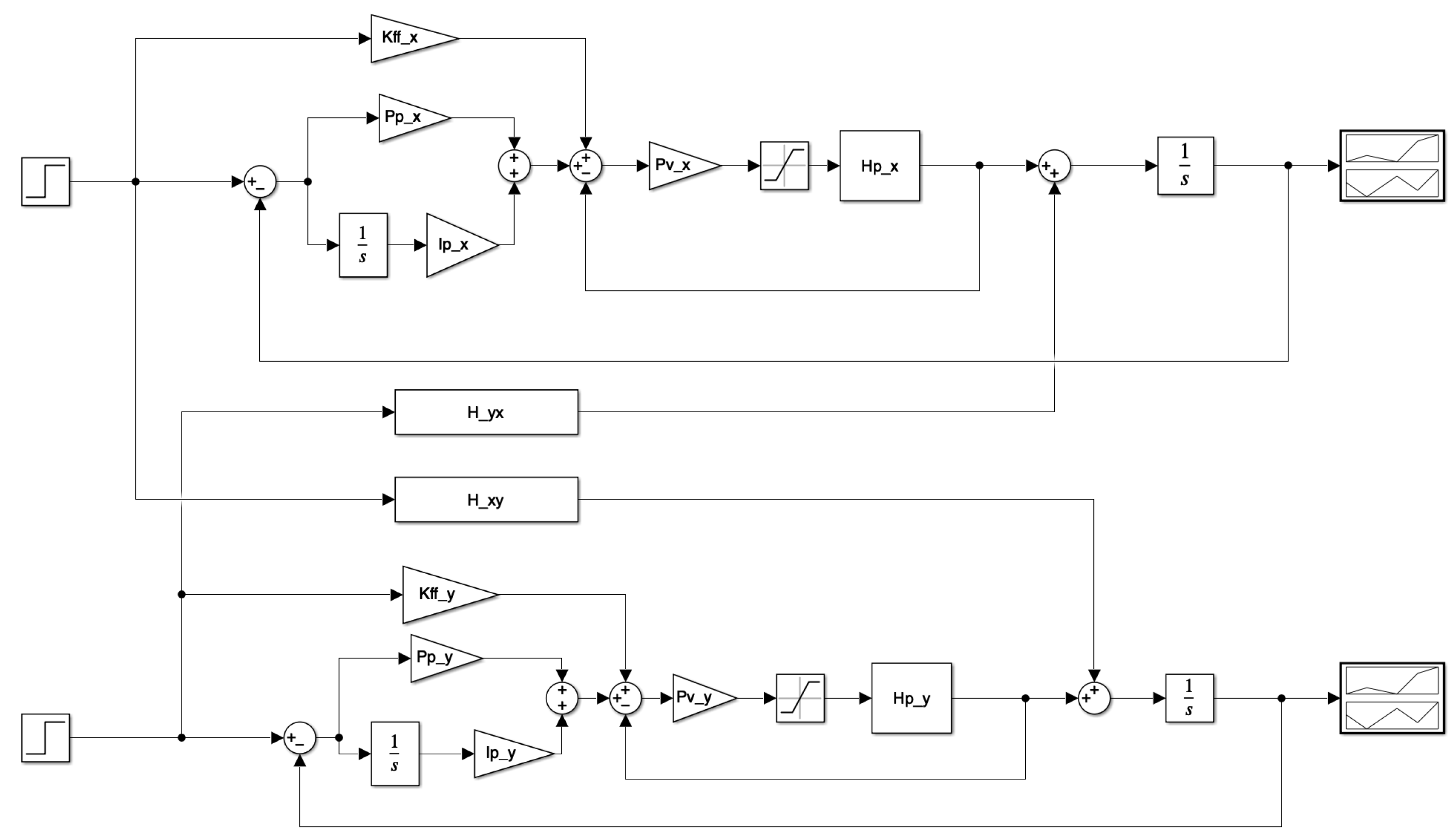
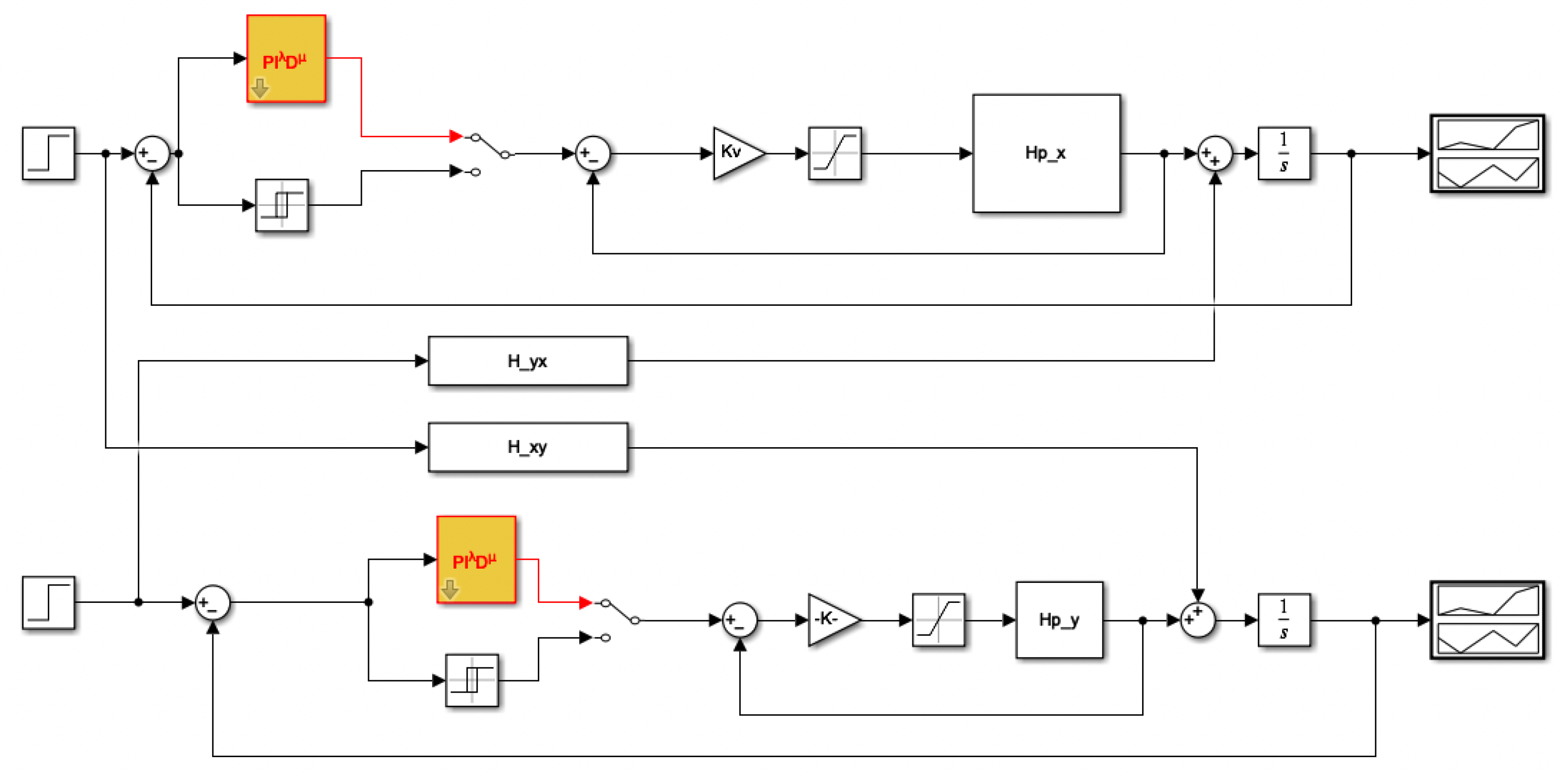
3.2. From State Feedback to Cascade Control
3.3. Feedforward Component
4. 4DOF Fractional-Order Controller
- For the inner loop, a simple P controller is used;
- For the outer loop, a particular structure of fractional-order PID controller is proposed:
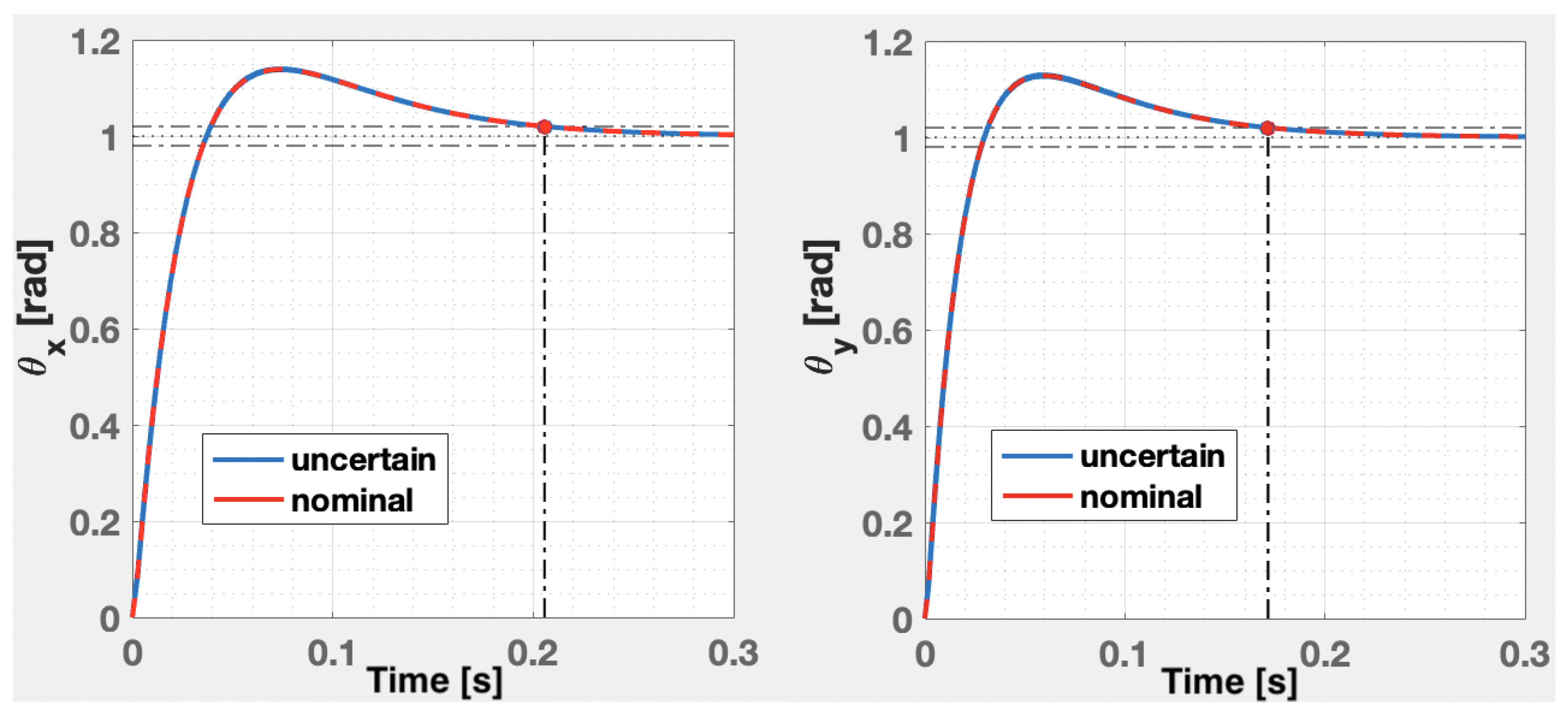
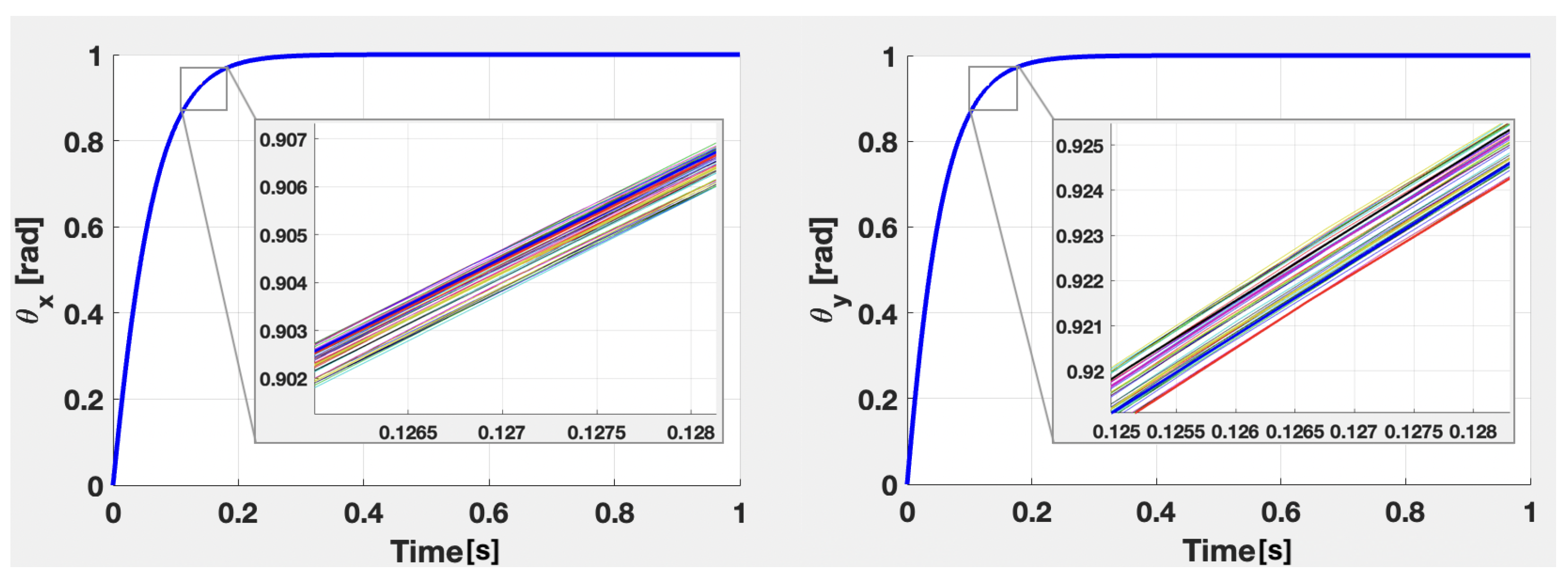
5. Numerical Results
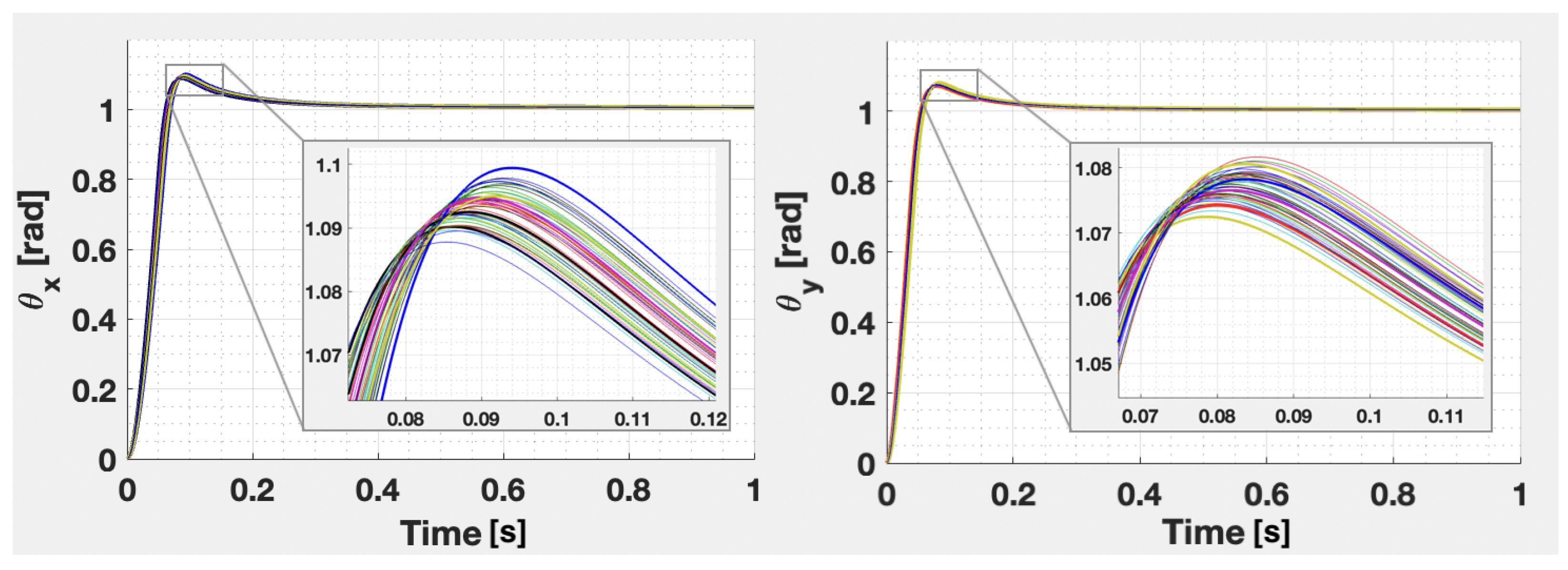
Cascade Control from State-Feedback Structure
- A settling time , imposed using the corresponding vertical strip parameter .
- A very small overshoot, tending to zero, imposed by the conic region corresponding parameter .
- The command signal allowed values , imposed by the corresponding LMI, having the initial conditions in the ellipsoid described using .
6. Discussions
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ABC | Artificial Bee Colony |
| CNC | Computer Numerical Control |
| DNLDI | Diagonal Norm-Bound Linear Differential Inclusion |
| FO-ID | Fractional-Order Integral-Derivative |
| FO-PID | Fractional-Order Proportional-Integral-Derivative |
| LDI | Linear Differential Inclusion |
| LMI | Linear Matrix Inequality |
| LQG | Linear-Quadratic-Gaussian |
| LQR | Linear-Quadratic-Regulator |
| MIMO | Multiple-Inputs and Multiple-Outputs |
| PID | Proportional Integral Derivative |
| PLDI | Polytopic Linear Differential Inclusion |
| PWM | Pulse Width Modulation |
| List of Symbols | |
| The set of symmetric and positive definite matrices of order n | |
| , | Angular speed for X and Y axes, respectively |
| , | Angular position for X and Y axes, respectively |
| , | Command signal for X and Y axes, respectively |
| , | Angular position’s reference for X and Y axes, respectively |
| , | Command signal for X and Y axes, respectively |
| , | Additional states resulting after augmentation |
| , | Time constant of the subsystem for X and Y axes, respectively |
| , | Gain factor of the subsystem for X and Y axes, respectively |
| , | Gain factor representing the interconnection between X and Y axes |
| The nominal value of an uncertain parameter c | |
| The disturbance input corresponding to an uncertain parameter c | |
| The disturbance output corresponding to an uncertain parameter c | |
| Lower and upper bound of an uncertain parameter c | |
| , | The resulting inner loop controllers’ parameters for both X and Y axes, respectively |
| , , , | The resulting outer loop controllers’ parameters for both X and Y axes, respectively |
| , | The feedforward gains for both X and Y axes, respectively |
| , | Time constant of the outer – controller for both X and Y axes, respectively |
| , | Fractional order of the outer – controller for both X and Y axes, respectively |
| , | The gain of the outer – controller for both X and Y axes, respectively |
References
- Lee, T.H.; Liang, W.; de Silva, C.W.; Tan, K.K. Force and Position Control of Mechatronic Systems—Design and Applications in Medical Devices; Springer Nature: Cham, Switzerland, 2021. [Google Scholar]
- Chilali, M.; Gahinet, P. H∞ Design with Pole Placement Constraints: An LMI Appproach. IEEE Trans. Autom. Control 1996, 41, 358–367. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; SIAM Studies in Applied Mathematics: Philadelphia, PA, USA, 1994. [Google Scholar]
- Assawinchaichote, V.; Nguang, S.K. H∞ Fuzzy Control Design For Nonlinear Singularly Perturbed Systems with Pole Placement Constraints: An LMI Approach. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2004, 34, 579–588. [Google Scholar] [CrossRef] [PubMed]
- Tarbouriech, S.; Queinnec, I.; Calliero, T.R.; Peres, P.L.D. Control design for bilinear systems with a guaranteed region of stability: An LMI-based approach. In Proceedings of the 17th Mediterranean Conference on Control and Automation, Thessaloniki, Greece, 24–26 June 2009; pp. 809–814. [Google Scholar]
- Sloth, C.; Esbensen, T.; Niss, M.O.K.; Stoustrup, J.; Odgaard, P.F. Robust LMI-based control of wind turbines with parametric uncertainties. In Proceedings of the 2009 IEEE Control Applications (CCA) & Intelligent Control (ISIC), St. Petersburg, Russia, 8–10 July 2009; pp. 776–781. [Google Scholar]
- Redondo, J.P.; Boada, B.L.; Díaz, V. LMI-Based H∞ Controller of Vehicle Roll Stability Control Systems with Input and Output Delays. Sensors 2021, 21, 7850. [Google Scholar] [CrossRef] [PubMed]
- Guerrero-Sánchez, M.-E.; Hernández-González, O.; Lozano, R.; García-Beltrán, C.-D.; Valencia-Palomo, G.; López-Estrada, F.-R. Energy-Based Control and LMI-Based Control for a Quadrotor Transporting a Payload. Mathematics 2019, 7, 1090. [Google Scholar] [CrossRef]
- Olalla, C.; Leyva, R.; El Aroudi, A.; Queinnec, I. Robust LQR control for PWM converters: An LMI approach. IEEE Trans. Ind. Electron. 2009, 56, 2548–2558. [Google Scholar] [CrossRef]
- Daher, F.A.; Stoustrup, J. Robust structured control design via LMI optimization. IFAC Proc. 2011, 44, 7933–7938. [Google Scholar]
- Da Silva, L.R.T.; de Campos, L.A.H.; Potts, A.S. Robust Control for Helicopters Performance Improvement: An LMI Approach. J. Aerosp. Technol. Manag. 2020, 12, e3620. [Google Scholar] [CrossRef]
- Cocetti, M.; Donnarumma, S.; De Pascali, L.; Ragni, M.; Biral, F.; Panizzolo, F.; Rinaldi, P.P.; Sassaro, A.; Zaccarian, L. Hybrid nonovershooting set-point pressure regulation for a wet clutch. IEEE/ASME Trans. Mechatron. 2020, 25, 1276–1287. [Google Scholar] [CrossRef]
- Lino, P.; Maione, G. Fractional-order controllers for mechatronics and automotive applications. In Handbook of Fractional Calculus with Applications—Volume 6: Applications in Control; De Gruyter: Berlin, Germany, 2019; pp. 267–292. [Google Scholar]
- Dulf, E.-H.; Șușcă, M.; Kovács, L. Novel Optimum Magnitude Based Fractional Order Controller Design Method. IFAC-PapersOnLine 2018, 51, 912–917. [Google Scholar] [CrossRef]
- Rahman, M.Z.U.; Leiva, V.; Martin-Barreiro, C.; Mahmood, I.; Usman, M.; Rizwan, M. Fractional Transformation-Based Intelligent H-Infinity Controller of a Direct Current Servo Motor. Fractal Fract. 2023, 7, 29. [Google Scholar] [CrossRef]
- Dulf, E.-H. Simplified Fractional Order Controller Design Algorithm. Mathematics 2019, 7, 1166. [Google Scholar] [CrossRef]
- Duma, R.; Dobra, P.; Trusca, M. Embedded application of fractional order control. Electron. Lett. 2012, 48, 1526–1528. [Google Scholar] [CrossRef]
- Mihaly, V.; Şuşcă, M.; Morar, D.; Stănese, M.; Dobra, P. μ-Synthesis for Fractional-Order Robust Controllers. Mathematics 2021, 9, 911. [Google Scholar] [CrossRef]
- Mihaly, V.; Şuşcă, M.; Dulf, E.H. μ-Synthesis FO-PID for Twin Rotor Aerodynamic System. Mathematics 2021, 9, 2504. [Google Scholar] [CrossRef]
- Mihaly, V.; Şuşcă, M.; Dulf, E.H.; Dobra, P. Approximating the Fractional-Order Element for the Robust Control Framework. In Proceedings of the 2022 American Control Conference, Atlanta, GA, USA, 8–10 June 2022; pp. 1151–1157. [Google Scholar]
- Ghorbani, M.; Tepljakov, A.; Petlenkov, E. Stabilizing region of fractional-order proportional integral derivative controllers for interval fractional-order plants. Trans. Inst. Meas. Control 2022, 45, 546–556. [Google Scholar] [CrossRef]
- Zheng, S.; Tang, X.; Song, B. A graphical tuning method of fractional order proportional integral derivative controllers for interval fractional order plant. J. Process. Control 2014, 24, 1691–1709. [Google Scholar] [CrossRef]
- Sławomir, M. Comparison of automatically tuned cascade control systems of servo-drives for numerically controlled machine tools. Elektron. Elektrotechnika 2014, 20, 16–23. [Google Scholar]
- Morar, D.; Dobra, P. Optimal LQR weight matrices selection for a CNC machine controller. In Proceedings of the 2021 23rd International Conference on Control Systems and Computer Science (CSCS), Bucharest, Romania, 26–28 May 2021. [Google Scholar]
- Morar, D.; Mihaly, V.; Şuşcă, M.; Dobra, M. LMI Conditions for CNC Cascade Controller Design - A State Feedback Approach. In Proceedings of the 2022 IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 19–21 May 2022; pp. 1–6. [Google Scholar]
- Shaul, G.; Jury, E. A general theory for matrix root-clustering in subregions of the complex plane. IEEE Trans. Autom. Control 1981, 26, 853–863. [Google Scholar]
- Morar, D. Advanced Control Techniques for CNC Machines. Ph.D. Thesis, Technical University of Cluj-Napoca, Cluj-Napoca, Romania, 2022. [Google Scholar]
- Balas, G.; Chiang, R.; Packard, A.; Safonov, M. Robust Control Toolbox—User’s Guide; The MathWorks: Natick, MA, USA, 2020. [Google Scholar]
- Tepljakov, A. FOMCON Toolbox for MATLAB; GitHub: San Francisco, CA, USA, 2022; Available online: https://github.com/extall/fomcon-matlab/releases/tag/v1.50.4 (accessed on 3 December 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Nominal Value | Percentage | Parameter | Nominal Value | Percentage |
|---|---|---|---|---|---|
| 0.0245 | 25.8017 | ||||
| 0.0114 | 24.9174 | ||||
| 26.65 | 24.46 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morar, D.; Mihaly, V.; Şuşcă, M.; Dobra, P. Cascade Control for Two-Axis Position Mechatronic Systems. Fractal Fract. 2023, 7, 122. https://doi.org/10.3390/fractalfract7020122
Morar D, Mihaly V, Şuşcă M, Dobra P. Cascade Control for Two-Axis Position Mechatronic Systems. Fractal and Fractional. 2023; 7(2):122. https://doi.org/10.3390/fractalfract7020122
Chicago/Turabian StyleMorar, Dora, Vlad Mihaly, Mircea Şuşcă, and Petru Dobra. 2023. "Cascade Control for Two-Axis Position Mechatronic Systems" Fractal and Fractional 7, no. 2: 122. https://doi.org/10.3390/fractalfract7020122
APA StyleMorar, D., Mihaly, V., Şuşcă, M., & Dobra, P. (2023). Cascade Control for Two-Axis Position Mechatronic Systems. Fractal and Fractional, 7(2), 122. https://doi.org/10.3390/fractalfract7020122