3.1. Effects of Geometric and Personal Factors on Speed
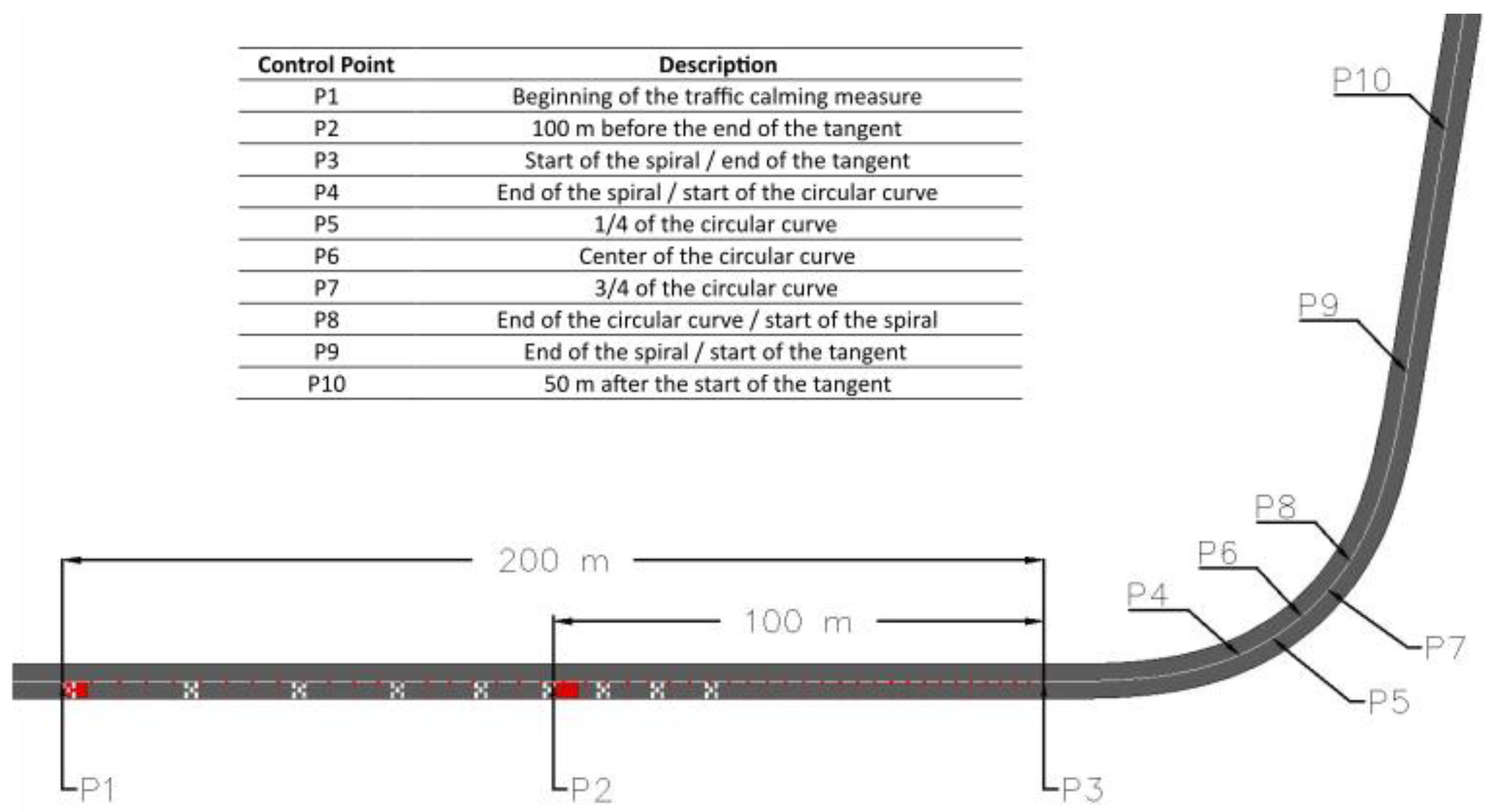
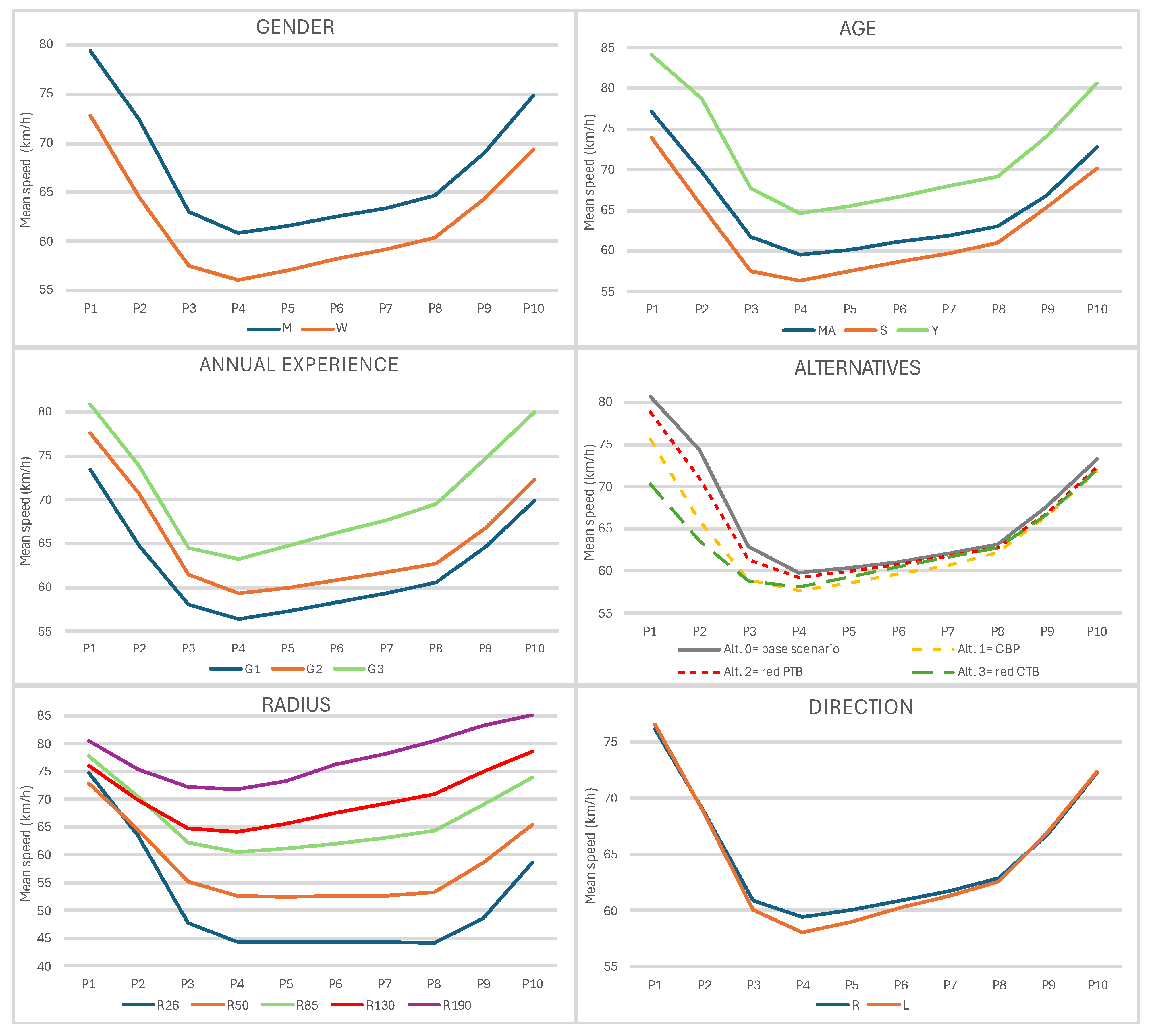
Figure 8 presents the mean speed profiles (km/h) across ten homologous points (P1–P10), representing different phases of the curve, for six analysed factors. These plots allow for a comparative analysis of how each factor influences speed variation along the trajectory. The results indicated that gender, age, annual experience, and radius exhibited notable differences between groups, while direction showed minimal variation. The shape of the speed curves suggested a common deceleration and acceleration pattern across all factors, with the lowest mean speed occurring at P4, which corresponded to the end of the spiral and the beginning of the circular curve. The greatest overall speed reduction took place in the approach phase.
Table 4 shows the ANOVA results for the six factors along the ten homologous points. Notably, while some factors, such as gender, age, and annual experience, consistently yielded highly significant results (
p = <0.01 across all points), others, such as alternative and direction, exhibited more variability, suggesting differential effects along the curve. To complement these results,
Table 5 presents the effect sizes (η
2) in percentage form, providing insight into the practical significance of these differences. While statistical significance indicates whether an effect exists, the η
2 values help assess its magnitude. Radius is the dominant factor influencing speed variation, with consistently high effect sizes across the curve.
The ANOVA analysis of the gender factor showed statistically significant differences at all homologous points (P1–P10,
p < 0.01,
Table 4), indicating that gender consistently influenced speed. Male drivers maintained higher speeds than female drivers across all phases of the trajectory. The greatest difference between both genders occurred at P2, where male drivers were 7.97 km/h faster than female drivers (
Figure 8). This point was located 100 metres before the end of the straight section, where traffic calming measures were implemented.
Speed was significantly influenced by the driver’s age, with statistically significant differences at all homologous points (P1–P10,
p < 0.01,
Table 4). The Fisher LSD post hoc test confirmed these differences across all age groups (Y: 18–24 years, M: 25–49 years, S: ≥50 years) at every point, except at P9 (start of the second tangent), where no significant difference was found between M and S drivers (
Appendix A). Younger drivers (Y) maintained the highest speeds, older drivers (S) exhibited the lowest, and the middle-aged group (M) fell in between, with average speed differences of 6.55 km/h between Y and M, 9.37 km/h between Y and S, and 2.83 km/h between M and S. The greatest difference between age groups occurred at P2, where Y drivers exceeded S drivers by 13.31 km/h (
Figure 8).
Annual driving experience influenced speed, with statistically significant differences at all homologous points (P1–P10,
p < 0.01,
Table 4). The Fisher LSD post hoc test confirmed significant differences between all experience levels (
Appendix A), with higher-annual distance drivers maintaining consistently higher speeds, while those with lower annual distance adopted a more cautious approach, showing average speed differences of 3.01 km/h (G2–G1), 8.25 km/h (G3–G1), and 5.16 km/h (G3–G2) (
Figure 8). The greatest difference occurred between G1 and G3 drivers at P10 (50 m after the start of the tangent), where G3 drivers exceeded G1 by 10.12 km/h.
Speed was significantly influenced by the tested alternative, with differences observed at the initial segments of the trajectory. Statistically significant variations were found from P1 to P3 (
p = <0.01) and at P4 (
p = <0.05) (
Table 4), confirming that the road markings affected driver behaviour before the curve but lost relevance beyond this point. The Fisher LSD post hoc analysis confirmed that the impact varied across alternatives (
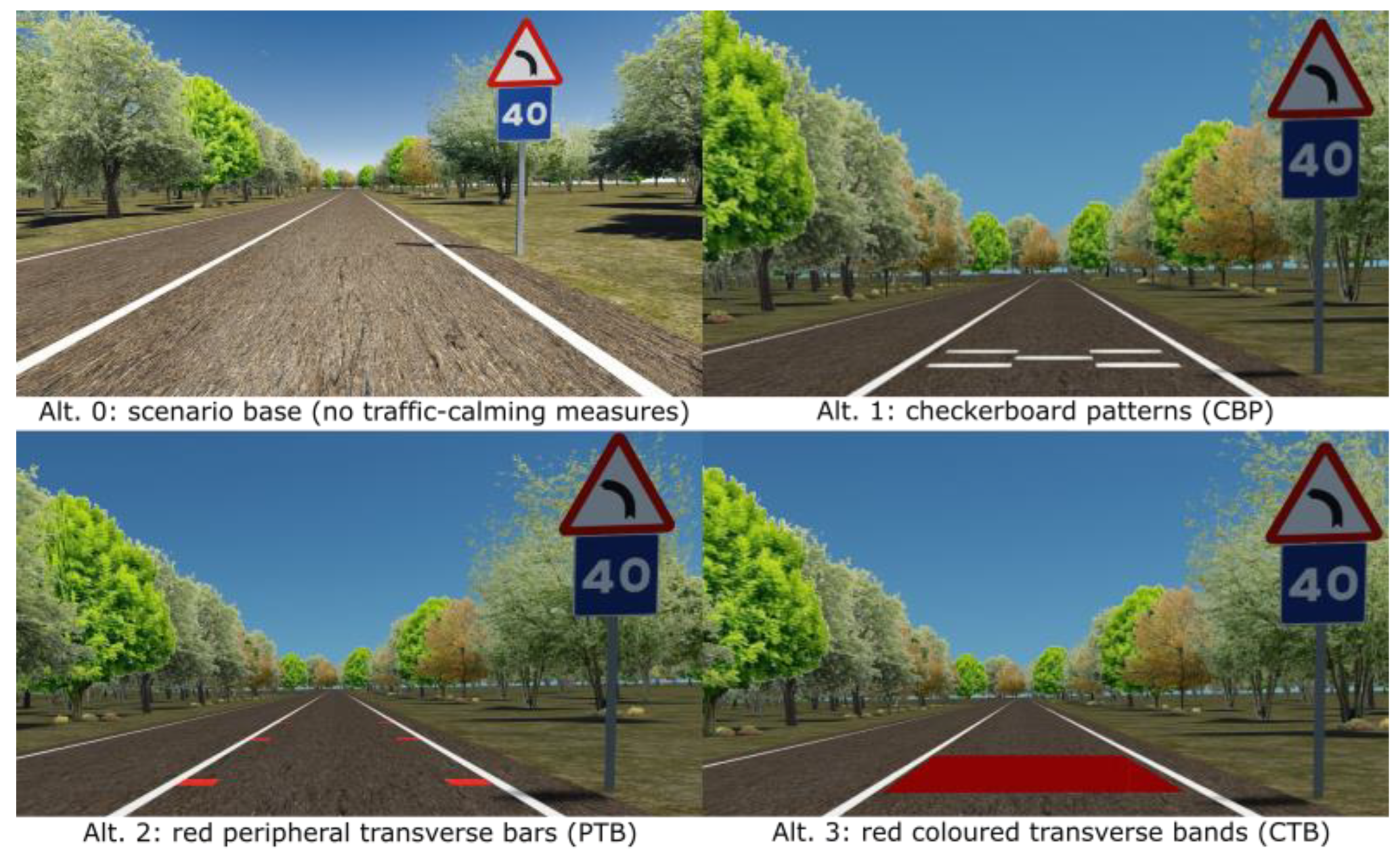
Appendix A). The CBPs (Alt. 1) consistently reduced speed from P1 to P5 compared to the base scenario, with the greatest reduction at P2, where drivers lowered their speed by 8.4 km/h (
Figure 8). On average, this alternative resulted in a 2.75 km/h lower speed than the base scenario. The red PTBs (Alt. 2) exhibited significant differences only at P1 and P2, indicating an early but limited effect, with their maximum reduction also at P2 (3.36 km/h) and an overall average reduction of 1.08 km/h. The red CTBs (Alt. 3) produced the strongest impact on speed reduction, with significant effects extending from P1 to P4, reaching a peak at P2, where the speed decrease was 10.83 km/h. This alternative maintained an average reduction of 3.18 km/h.
Speed was significantly influenced by curve radius, the dominant factor in speed variation (
Table 5), with
p-values of <0.01 at all homologous points (
Table 4). Smaller radii were associated with lower vehicle speeds, as sharper curves imposed greater constraints on driving dynamics. However, the differences in speed due to radius were less pronounced at the initial points closer to the straight section (
Figure 8), indicating that the effect of curve geometry on speed became more evident as drivers progressed further into the curve. The post hoc analysis confirmed significant differences in speed across all radius comparisons at nearly every homologous point (
Appendix A).
Travel direction showed minimal influence on speed, with no statistically significant differences at most homologous points, except at P4 (end of the spiral/start of the curve), where a
p-value of 0.02 indicated slightly higher speeds in the rightward direction (
Table 4). Despite this isolated difference of 1.33 km/h (
Figure 8), the overall impact of travel direction appeared negligible compared to the other factors analysed.
3.2. Effects of Road Markings by Curve Radius
Table 6 presents the results of the ANOVA analysis for the alternative factor, comparing homologous speed points (P1–P10) between pairs of curves grouped by radius. Given that the direction factor did not show significant effects (
Table 4), curves were analysed in pairs based on their radius to better assess the impact of alternatives on speed variation. Statistically significant differences (
p < 0.05) were observed mainly in the initial phases (P1–P3), where all curve pairs exhibited notable differences (
Table 6). However, as drivers progressed through the curve, significance decreased, and from P5 onwards, differences became largely non-significant.
Figure 9 presents the analysis of speed behaviour across the five studied curve radii grouped in pairs. The left column displays the mean speed profiles (km/h) for each alternative at the homologous points (P1–P10), allowing for direct comparisons of how the different traffic calming measures influenced speed reduction along the trajectory in each curve. The right column illustrates the variation in speed per metre travelled (m/s/m) at the stations where the previous ANOVA results identified statistically significant differences (P1–P4,
Table 4). This visualization enabled a more detailed assessment of the rate of speed variation per metre travelled and how it varied between alternatives in the early phases of the curve approach.
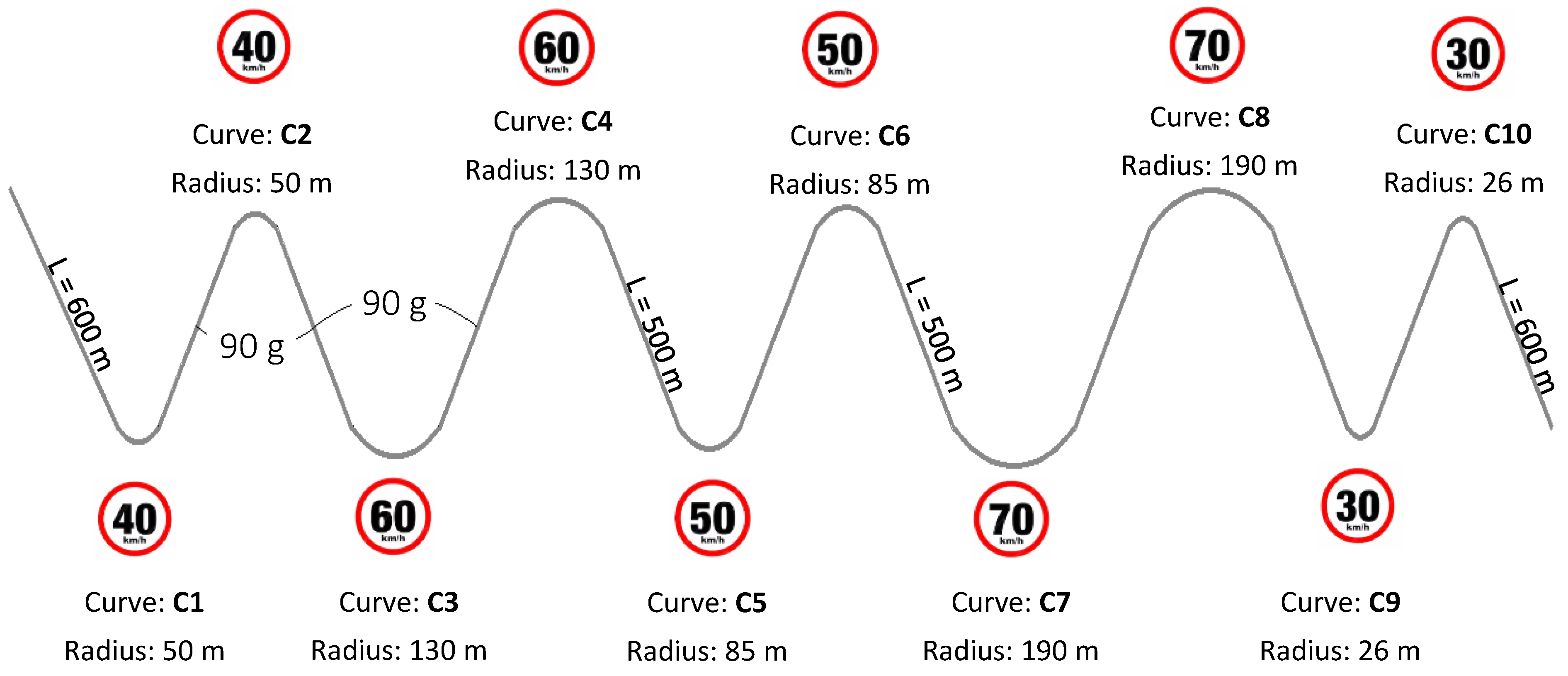
C9 and C10, the smallest curves in the study with radii of 26 metres, showed significant differences in the early segments according to the ANOVA results, with low
p-values at P1 and P2 (
p < 0.01,
Table 6). These differences decreased from P3 onward. The speed profile (
Figure 9, left) revealed that red CTBs resulted in the greatest speed reductions at the first two points. At these points, both red CTBs and CBPs showed statistically significant differences according to the Fisher LSD test (
Appendix A). From the third point onwards, the reduction was comparable across the three alternatives. While red PTBs followed an intermediate pattern, they resulted in a speed reduction of only 1.5 km/h before the start of the curve. Regarding speed variations per metre travelled (
Figure 9, right), CBPs started at 0.034 m/s/m in P1–P2, reached a maximum of 0.038 m/s/m in P2–P3, and declined to 0.024 m/s/m in P3–P4. Red PTBs followed a similar pattern but with higher values, beginning at 0.035 m/s/m, rising to 0.050 m/s/m, and reducing to 0.032 m/s/m in the final section. Finally, red CTBs showed the least variation, with values of 0.025 m/s/m in P1–P2, a slight increase to 0.032 m/s/m in P2–P3, and a decrease to 0.025 m/s/m in P3–P4, indicating a more stable speed transition.
For curves with a 50 m radius (C1 and C2), the ANOVA revealed statistically significant differences in the early segments of the trajectory (
p-values < 0.05 at points P1, P2, and P3,
Table 6). From P4 onwards,
p-values increased, suggesting that the effect of the alternatives diminished as vehicles progressed through the curve. The speed profile showed a progressive reduction at the initial sampling points, reaching a minimum at P4, where the average speed became similar across all alternatives (
Figure 9, left). However, differences were notable before entering the curve. Red CTBs produced the greatest speed reduction at P2 (9.73 km/h), while CBPs also led to a significant decrease compared to the base scenario, though to a lesser extent (8.8 km/h at P2). Red PTBs had an intermediate effect, with moderate reductions at P2. On average, across all homologous points, compared to the base scenario, CBPs reduced speed by 2.97 km/h, red PTBs by 1.00 km/h, and red CTBs by 2.62 km/h. Notably, CBPs showed statistically significant differences at P2 and P3 according to the Fisher LSD test, while red CTBs exhibited significant differences at P1, P2, and P3 (
Appendix A). The speed variation per metre travelled (
Figure 9, right) supported these findings. CBPs exhibited progressively smaller variations in speed as the hazard was approached, with values of 0.03 m/s/m in P1–P2, 0.023 m/s/m in P2–P3, and decreasing to 0.014 m/s/m in P3–P4. Red PTBs started at 0.022 m/s/m in P1–P2, increased to 0.027 m/s/m in P2–P3, and then decreased to 0.023 m/s/m in P3–P4. Red CTBs showed the least variation among the three, with values of 0.026 m/s/m in P1–P2, a reduction to 0.016 m/s/m in P2–P3, and a further gradual decrease to 0.013 m/s/m in P3–P4, reflecting uniform behaviour and less fluctuation in speed, like CBPs.
For curves C5 and C6 (85 m radius), the ANOVA results showed a statistically significant impact of the road marking alternatives between P1 and P3 (
Table 6). The speed profile (
Figure 9, left) revealed that all alternatives led to a reduction in speed before the curve, though with varying intensity. Red CTBs caused the greatest speed reduction at P2 (9.36 km/h), indicating an earlier and stronger driver response. CBPs followed a similar pattern but with a slightly lesser effect (9.13 km/h), while red PTBs remained closer to the base scenario, with a reduction of only 3.2 km/h 100 m before entering the curve. CBPs and red CTBs showed statistically significant differences at P1, P2, and P3 according to the Fisher LSD test (
Appendix A). The speed variations per metre travelled provided additional insights (
Figure 9, right). CBPs exhibited a speed variation of 0.026 m/s/m in P1–P2, decreasing to 0.019 m/s/m in P2–P3 and further declining to 0.006 m/s/m in P3–P4. The red PTBs started at 0.024 m/s/m in P1–P2, reached a peak of 0.027 m/s/m in P2–P3, and then decreased to 0.012 m/s/m in P3–P4. Meanwhile, the red CTBs showed the least variation, beginning at 0.012 m/s/m in P1–P2, increasing slightly to 0.015 m/s/m in P2–P3, and reducing to 0.004 m/s/m in P3–P4.
For curves with a 130 m radius (C3 and C4), the ANOVA results showed that road marking alternatives had a statistically significant impact mainly in the early trajectory segments, with
p-values remaining low until P4 with a marginal value of 0.06 (
Table 6). From P5 onwards, the effect diminished as
p-values increased. The speed profile (
Figure 9, left) highlighted a clear differentiation between alternatives before reaching the lowest speed point (P4). Red CTBs produced the greatest speed reduction on the approach, with a sharper drop at P2 compared to the base scenario (13 km/h). CBPs also caused a notable reduction, though smaller than red CTBs, while red PTBs remained closer to the base scenario. Post hoc analysis revealed statistically significant differences for the following: CBPs from P1 to P4, red PTBs at P2, and red CTBs from P1 to P3 (
Appendix A). The speed variation per metre travelled (
Figure 9, right) supported these findings. CBPs exhibited a decrease in speed variation, starting at 0.025 m/s/m in P1–P2, dropping to 0.012 m/s/m in P2–P3, and continuing to decline to 0.002 m/s/m in P3–P4. Red PTBs began at 0.016 m/s/m in P1–P2, maintained the same value in P2–P3, and decreased to 0.004 m/s/m in P3–P4. Red CTBs started at 0.014 m/s/m in P1–P2, decreased to 0.003 m/s/m in P2–P3, and further dropped to −0.004 m/s/m in P3–P4, indicating a consistent speed variation per metre travelled, like the CBPs.
Among the studied curves, C7 and C8 had the largest radius (190 m), and the ANOVA results showed statistically significant differences in speed reductions across the road marking alternatives, particularly in the approach phase (
Table 6). The speed profile (
Figure 9, left) showed that red CTBs caused the greatest speed reduction at 100 m before the curve (12.32 km/h), which is considerably less than the 22.05 km/h reduction observed by Montella [
15], followed by CBPs, which showed a noticeable decrease at the same point (P2, 7.5 km/h). Red PTBs remained closer to the base scenario, with a less pronounced effect on speed reduction. Post hoc Fisher LSD analysis revealed statistically significant differences for CBPs from P1 to P3 and for red CTBs from P1 to P4 (
Appendix A). In speed variation per metre travelled (
Figure 9, right), CBP started at 0.018 m/s/m in P1–P2, progressively declined to 0.005 m/s/m in P2–P3, and further dropped to −0.001 m/s/m in P3–P4. Red PTBs began at 0.012 m/s/m in P1–P2, maintained the same value in P2–P3, and decreased to 0.005 m/s/m in P3–P4. Red CTBs exhibited a greater reduction in speed, starting at 0.013 m/s/m in P1–P2, decreasing to 0.001 m/s/m in P2–P3, and finishing at −0.006 m/s/m in P3–P4.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}