Star Type Wireless Sensor Network for Future Distributed Structural Health Monitoring Applications


Abstract
:1. Introduction
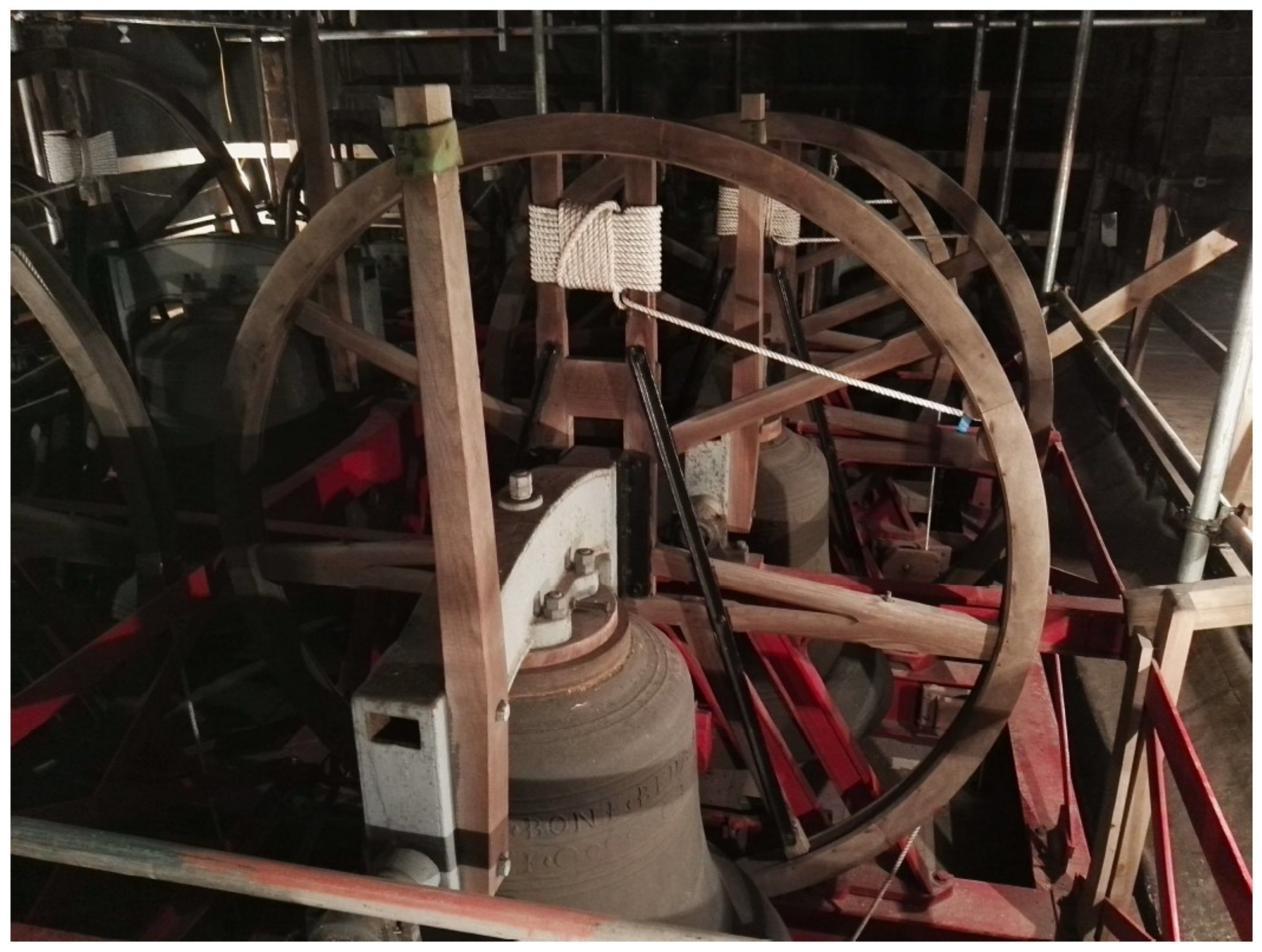
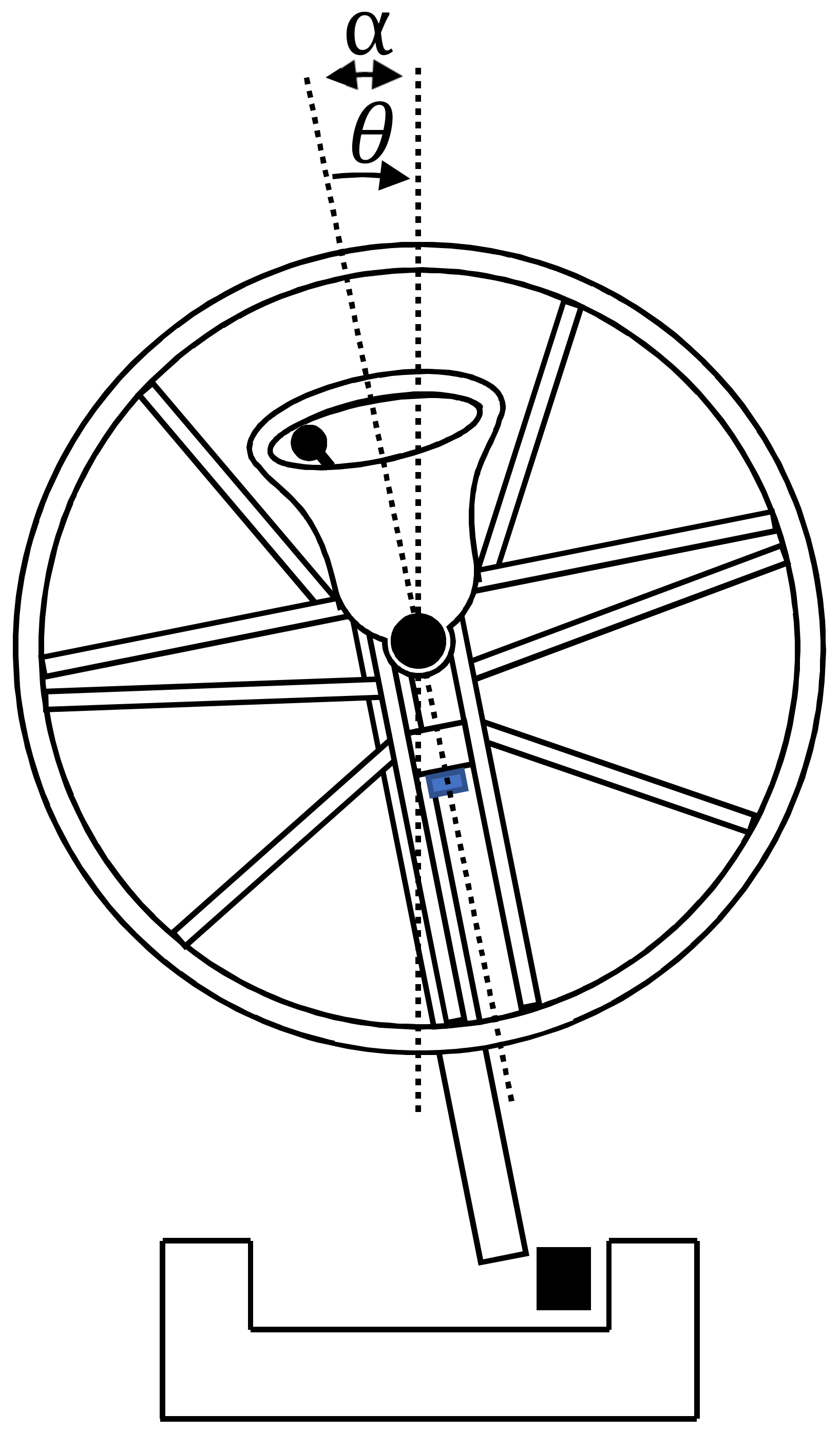
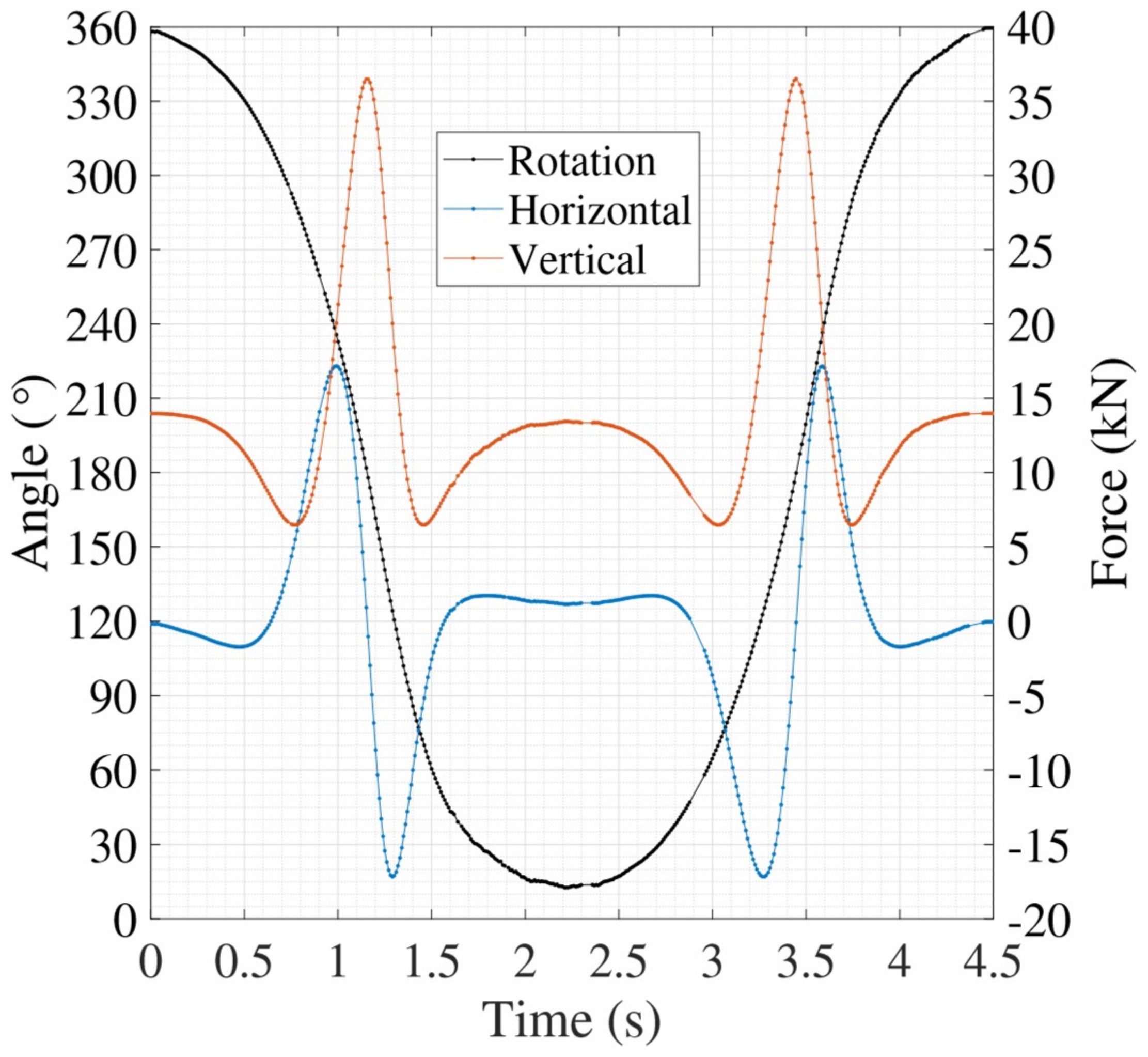
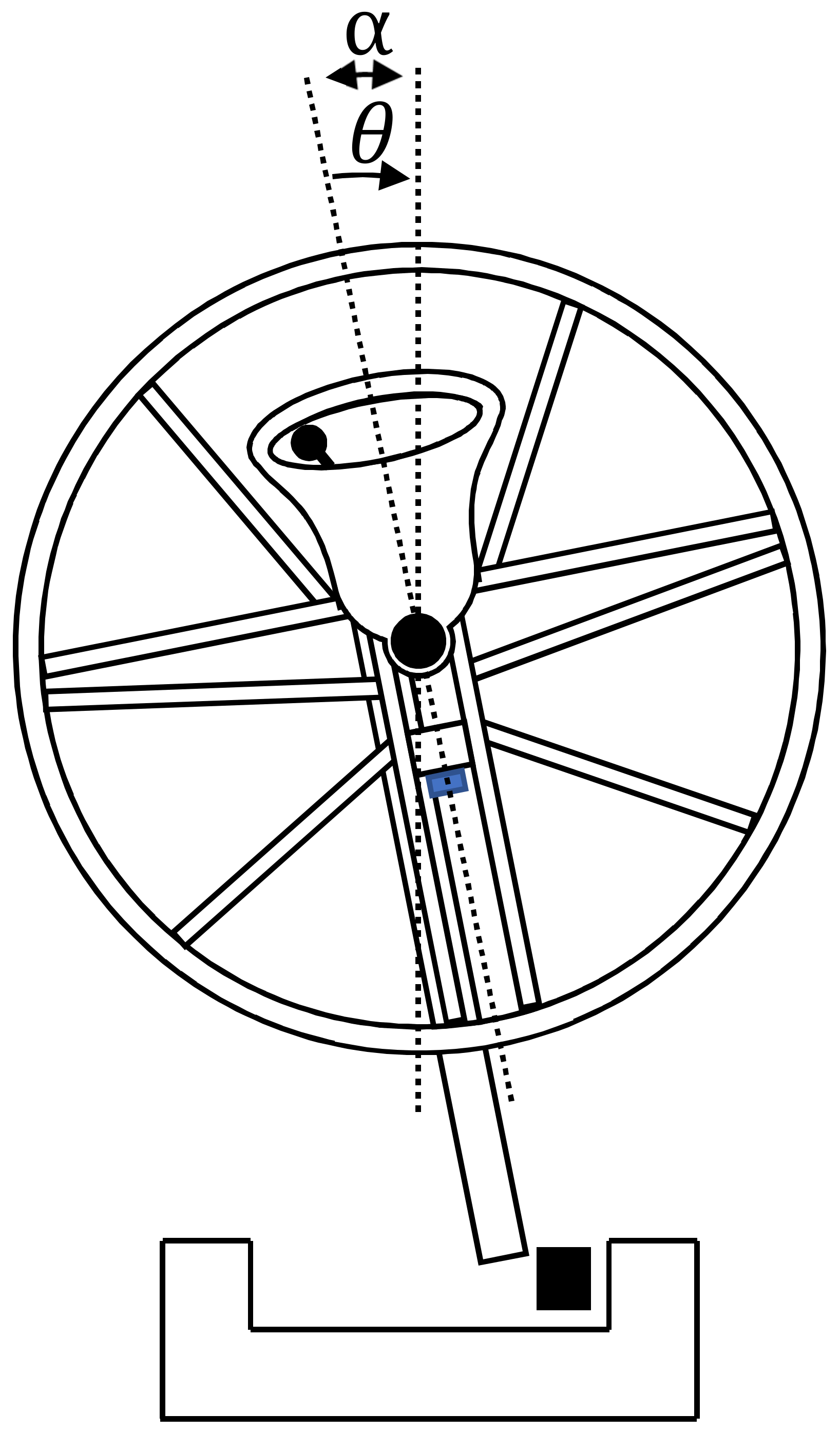
1.1. Bell Theory
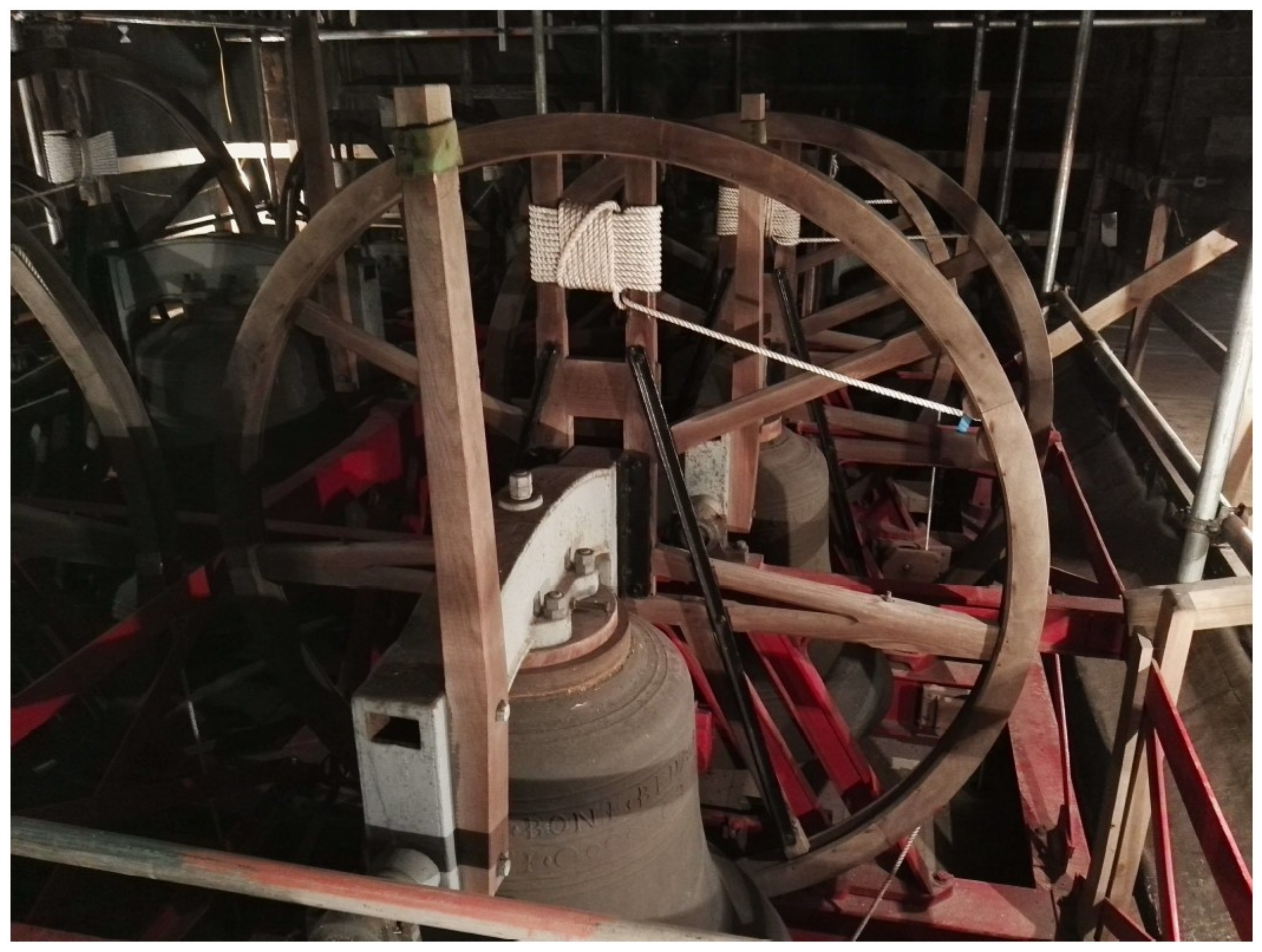
1.2. Durham Cathedral
1.3. Motivation for Experimental Work
2. Materials and Methods
2.1. Networking Protocol and Hardware Selection
2.1.1. Wireless Networking Protocol
2.1.2. Communication Protocol
2.1.3. System on Chip and Supporting Hardware
2.1.4. Inertial Measurement Unit (IMU)
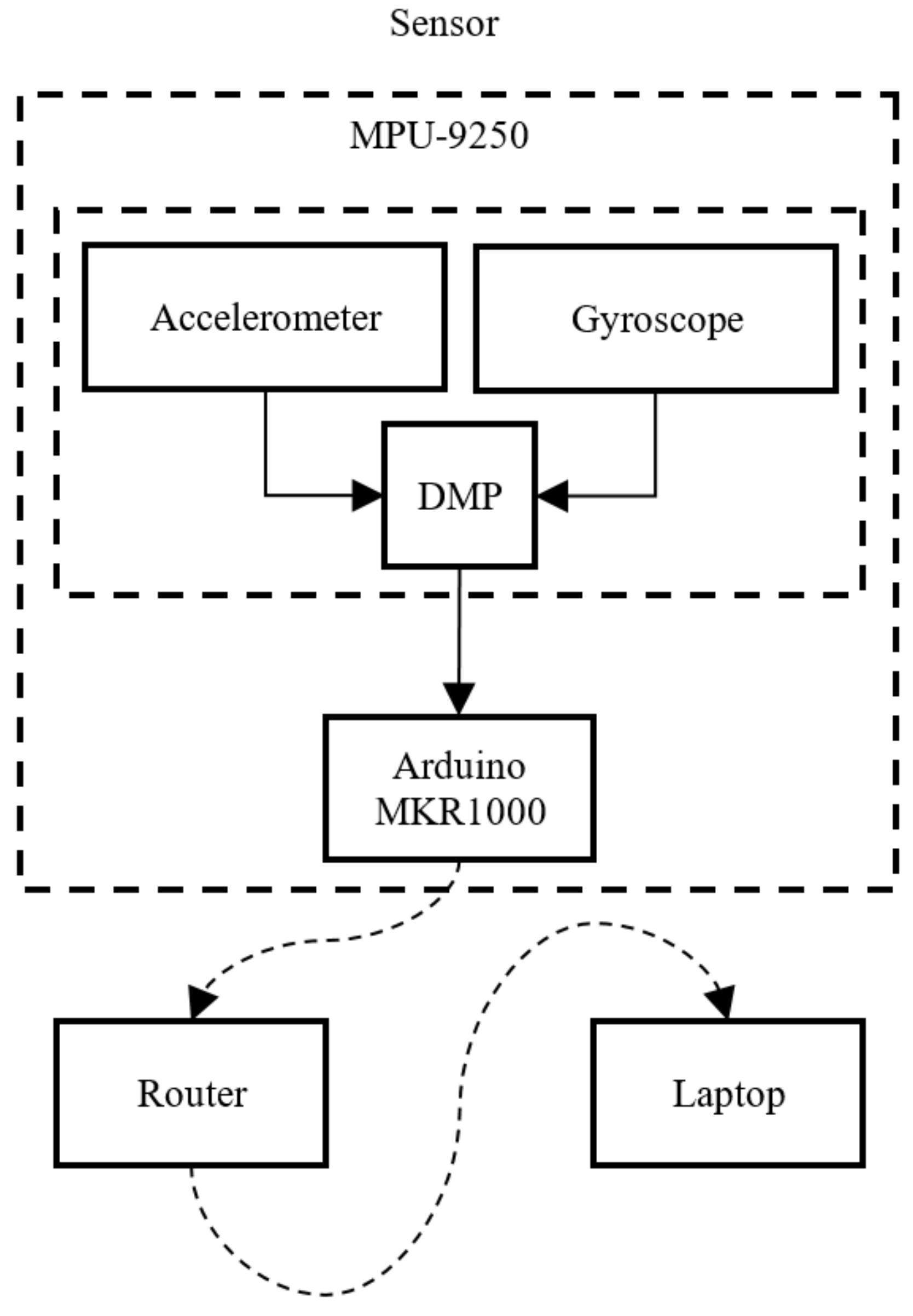
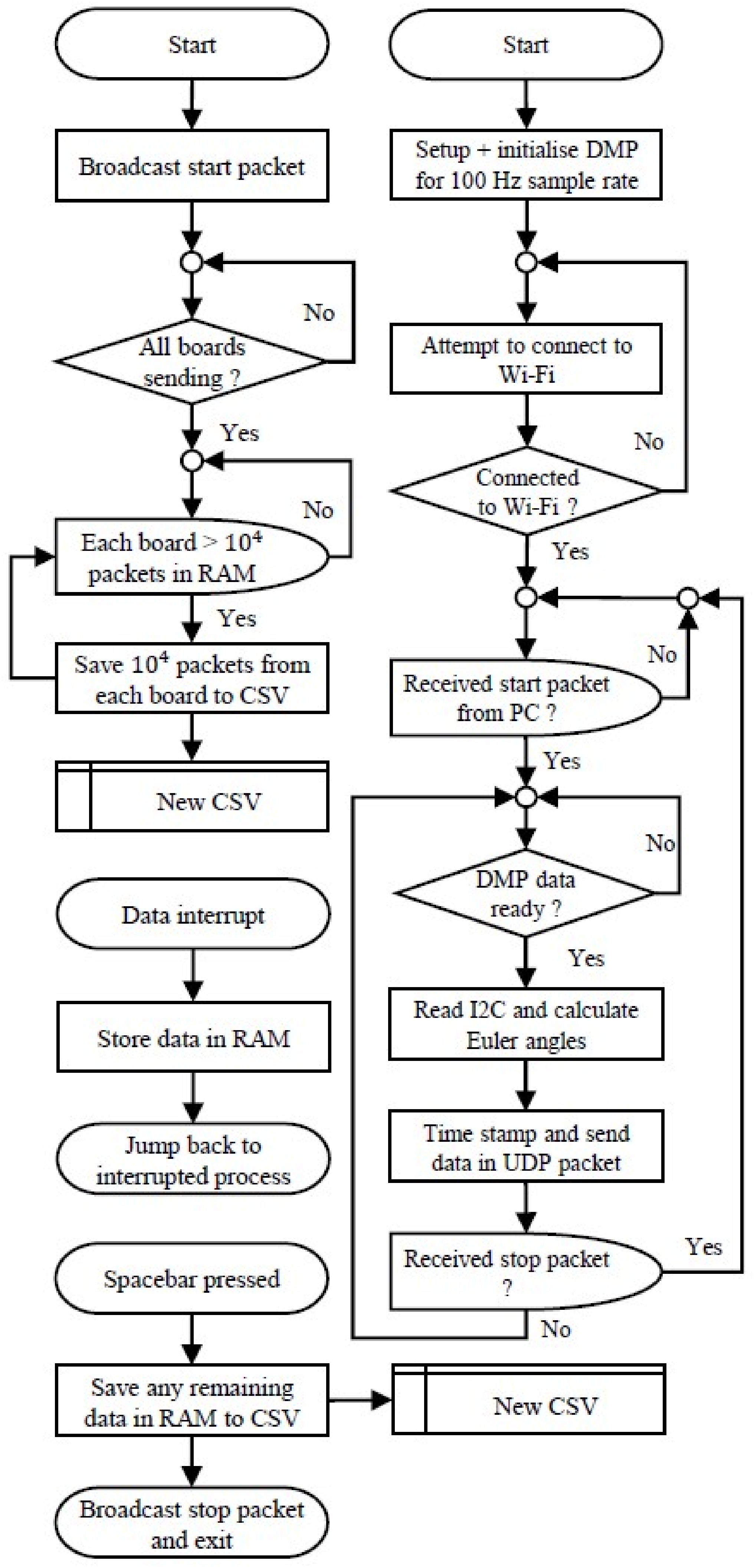
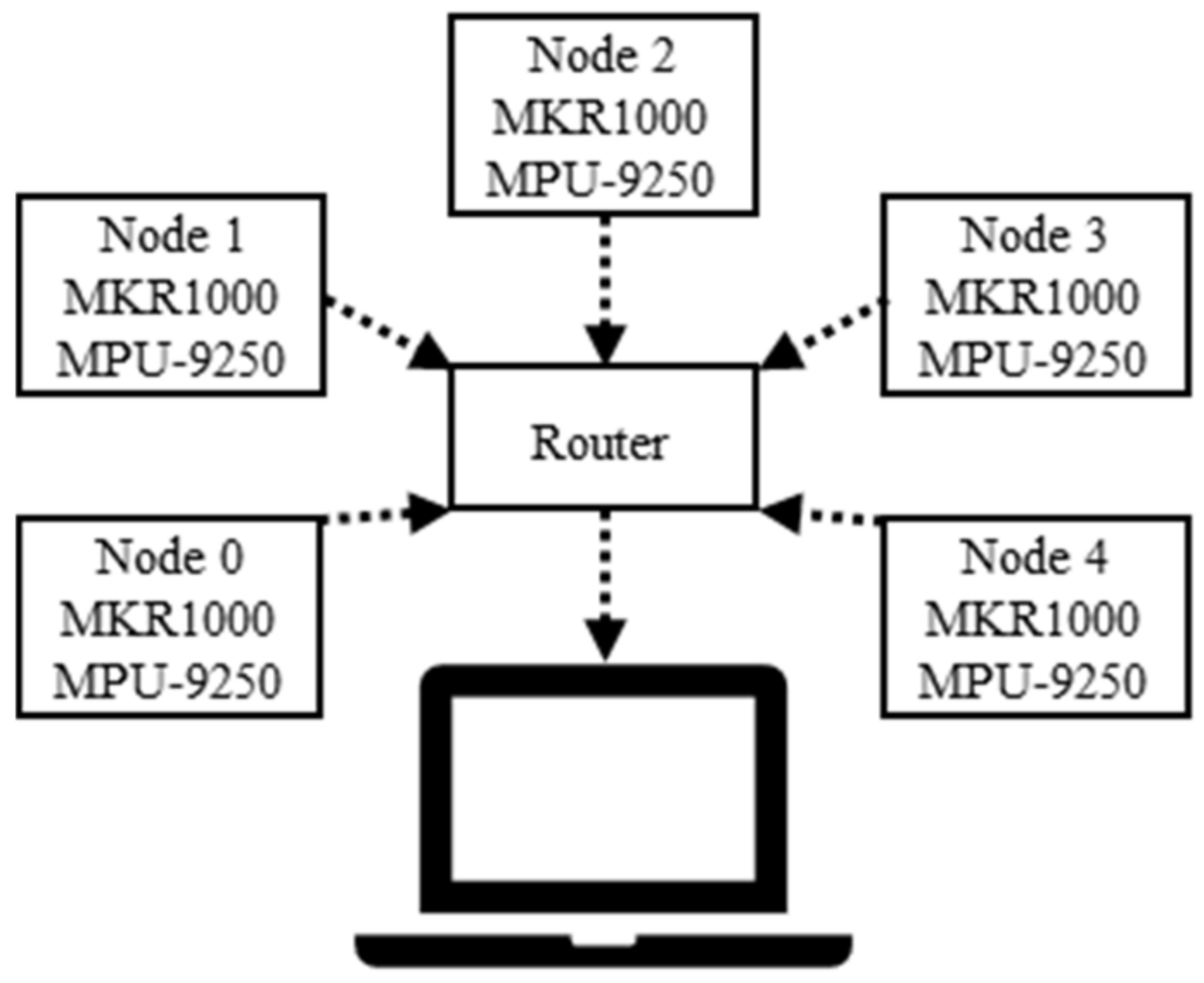
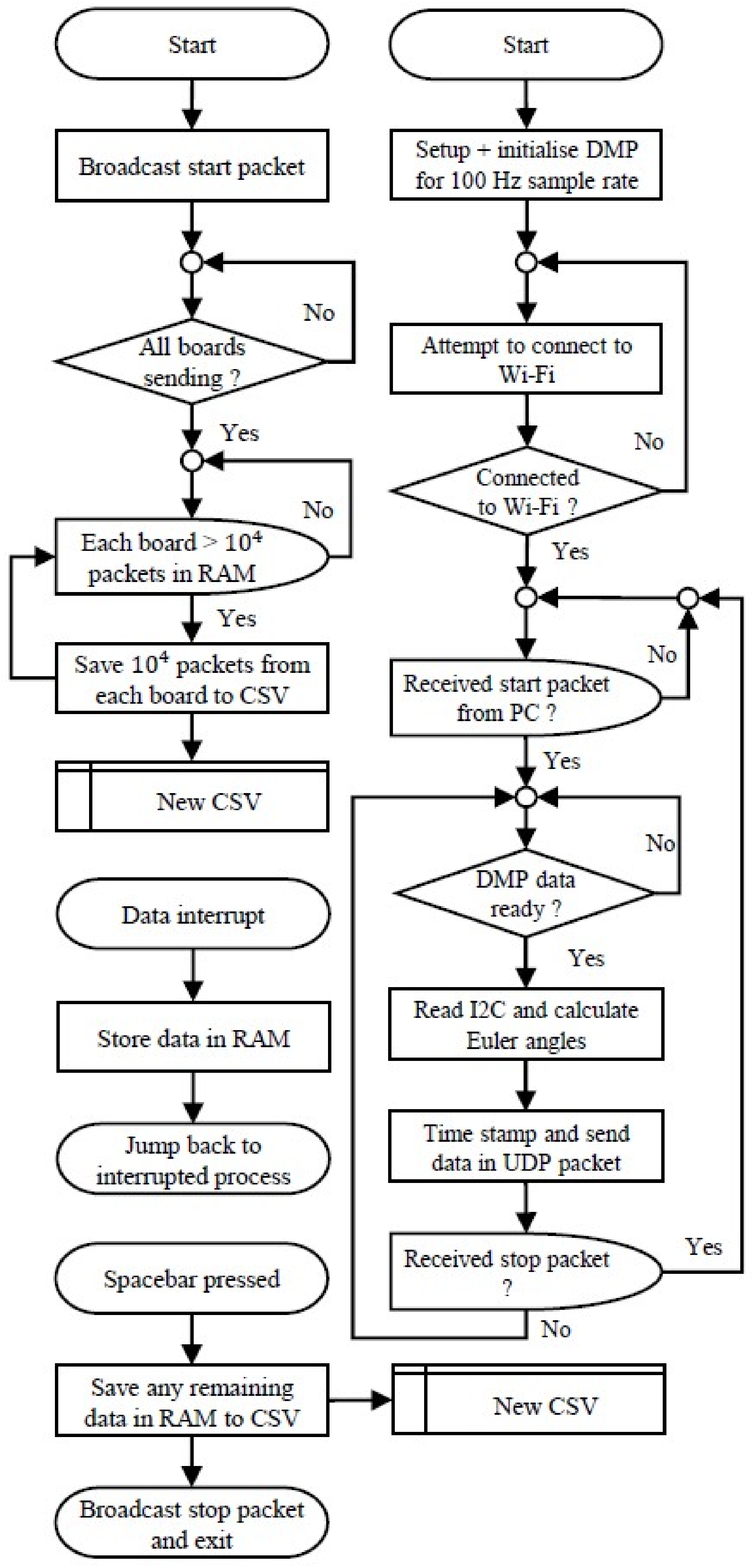
2.2. System Description
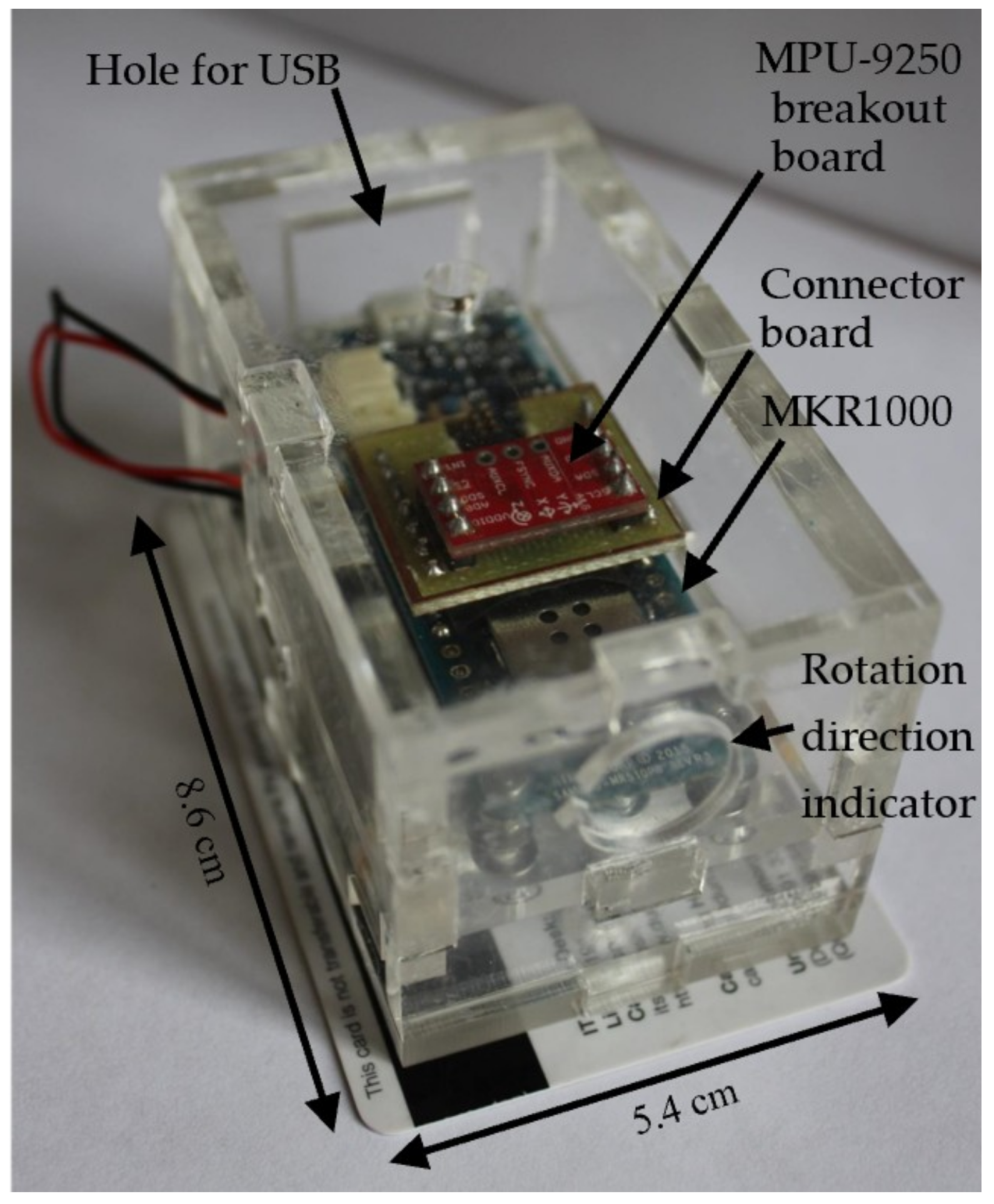
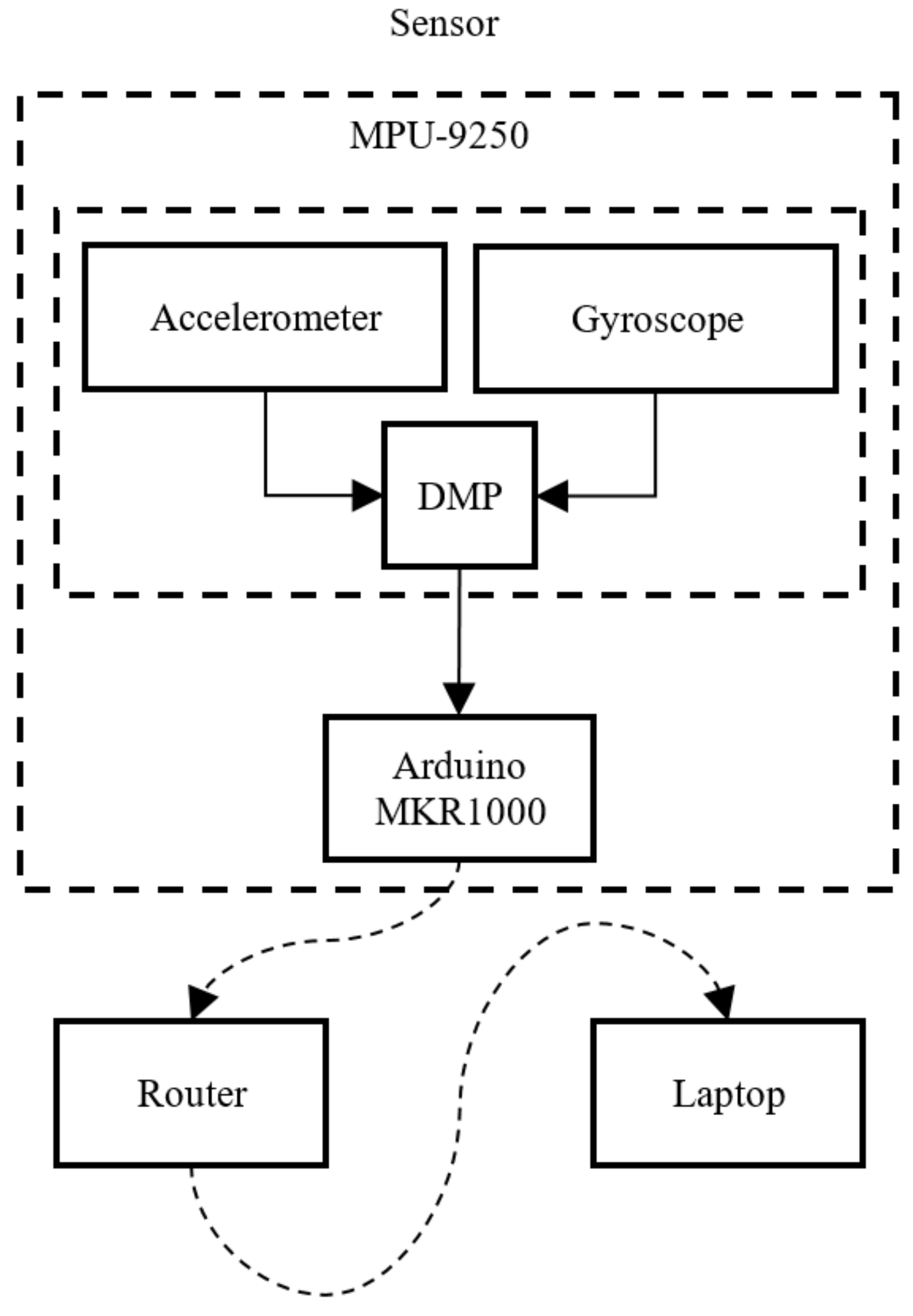
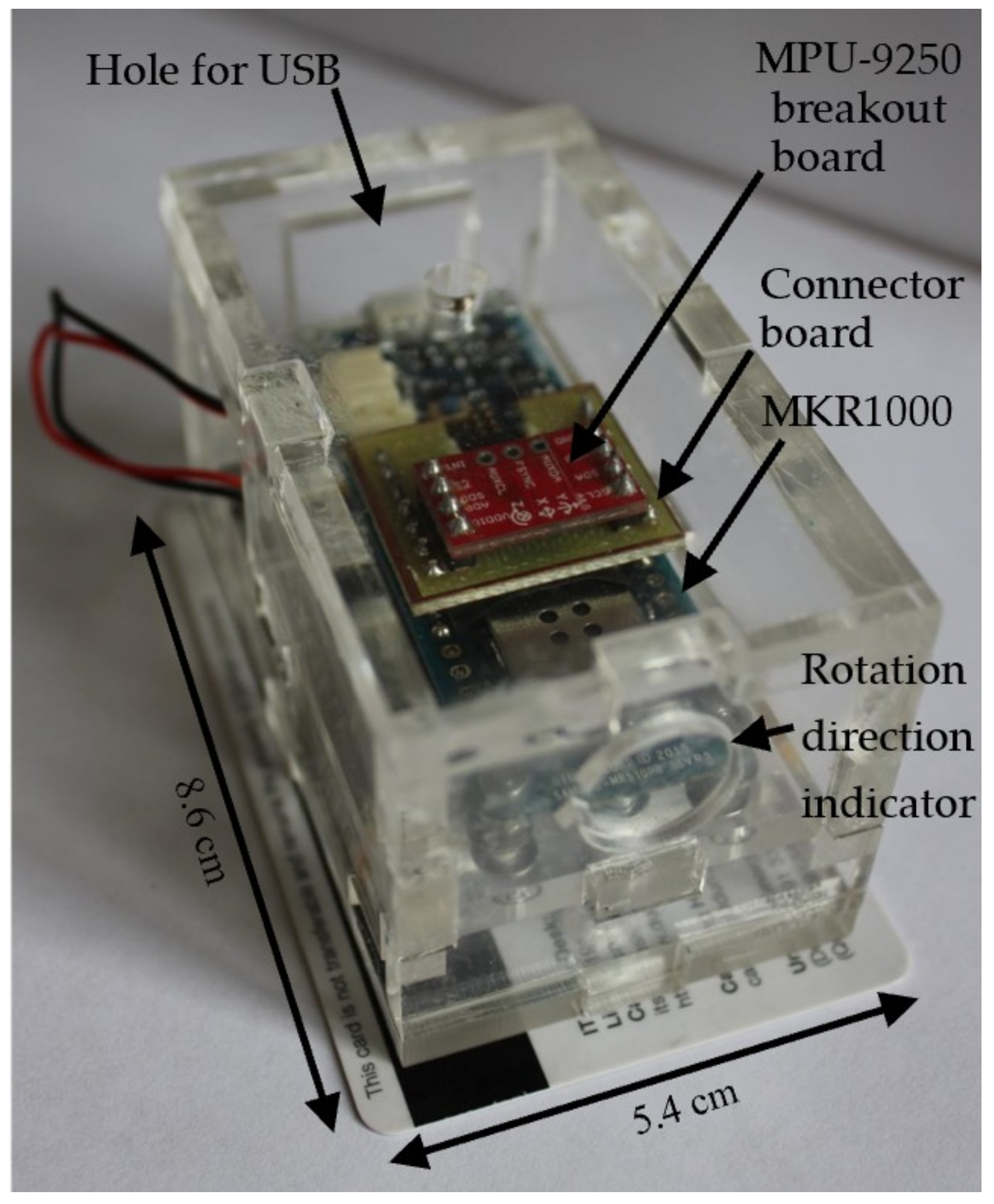
2.2.1. Sensor Description
2.3. Verification of Data Integrity
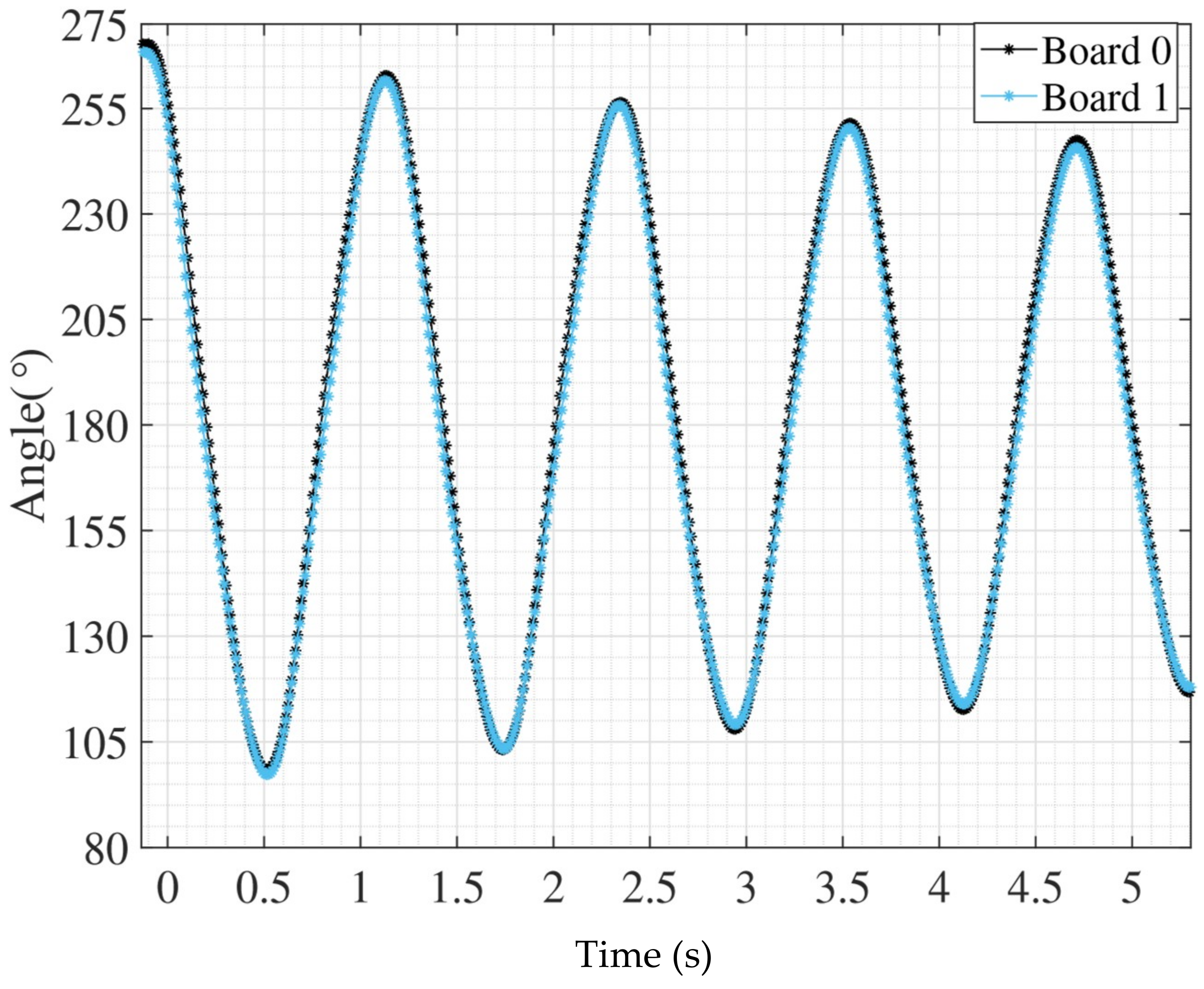
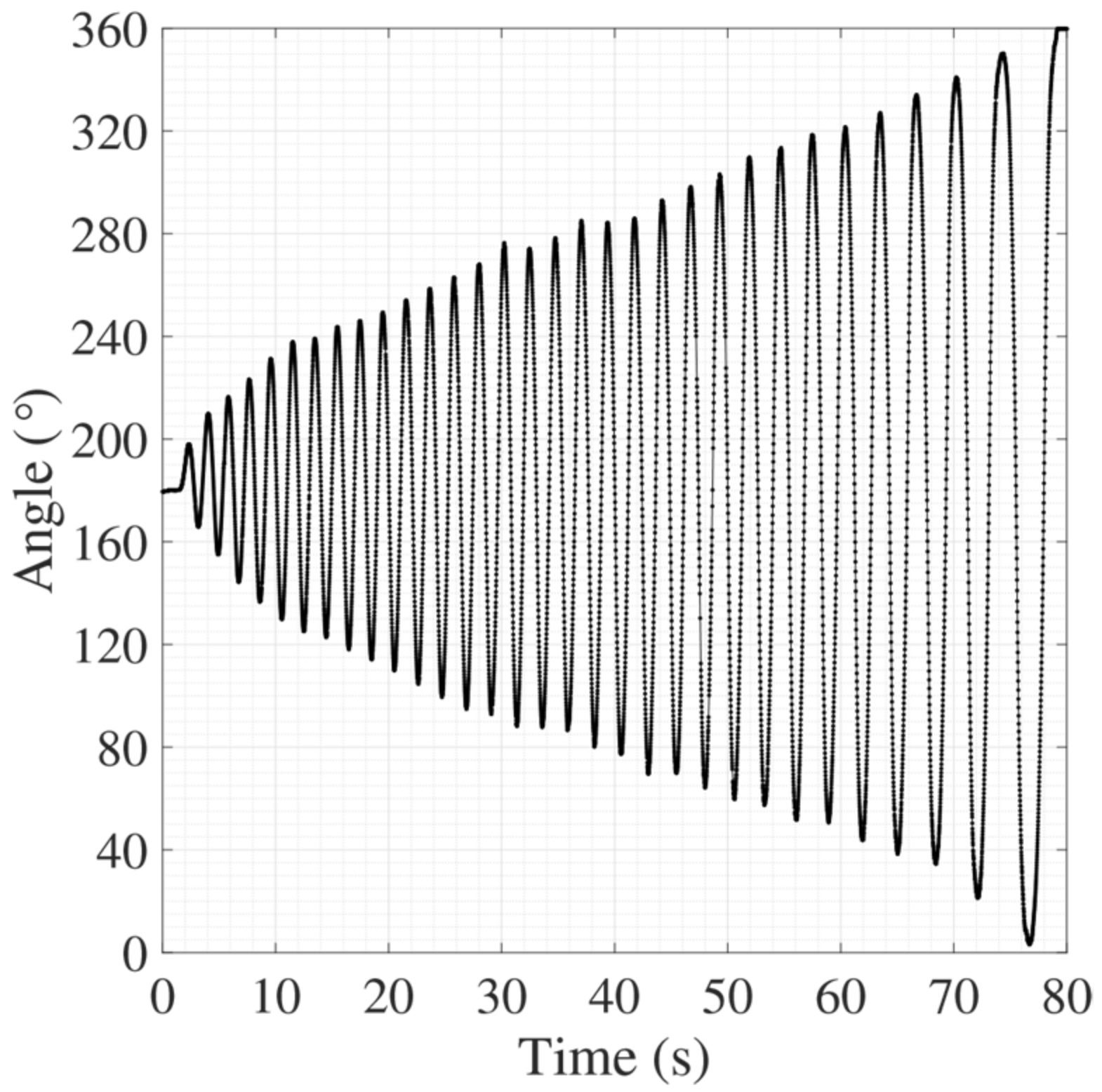
2.3.1. Angle Measurement Reliability
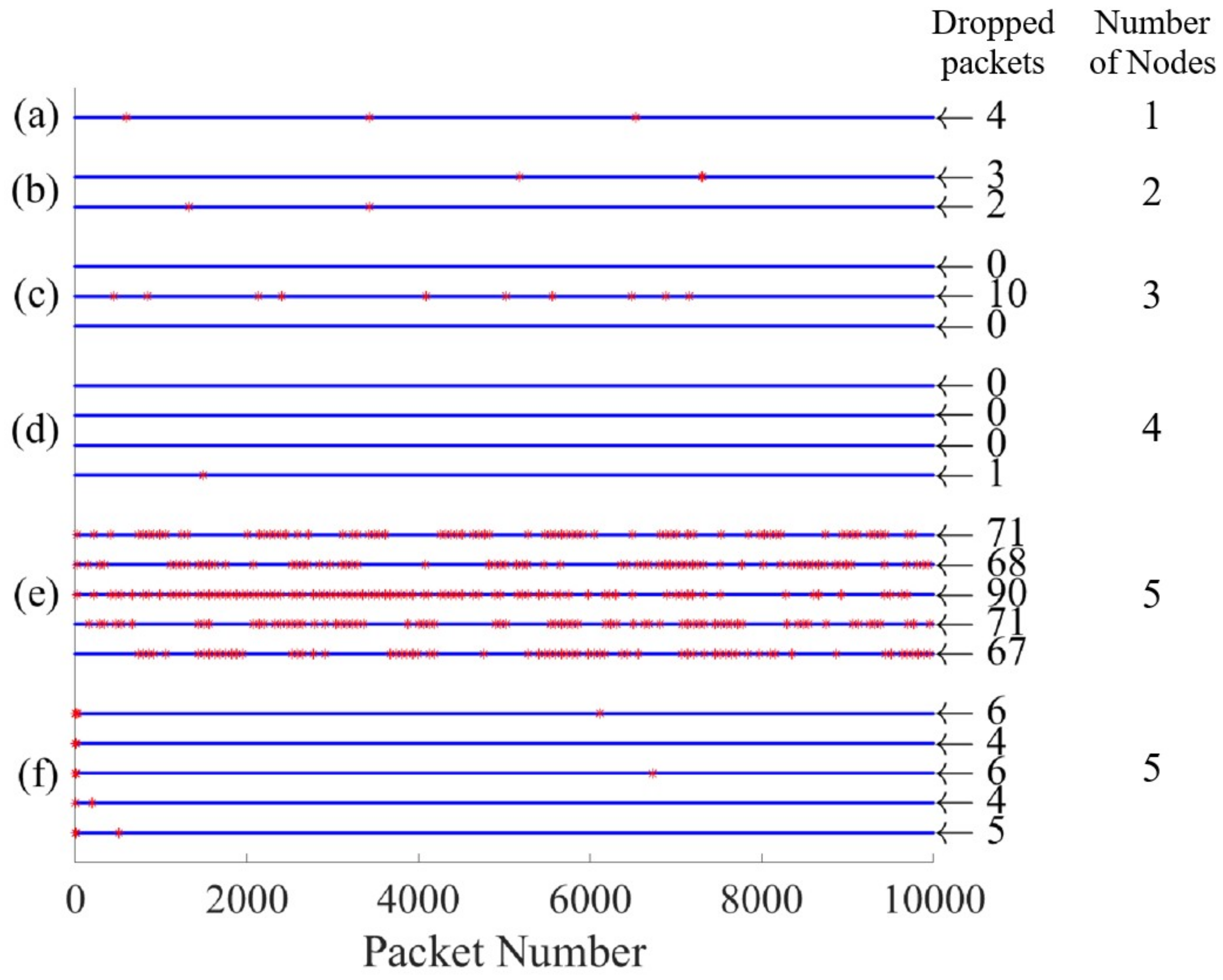
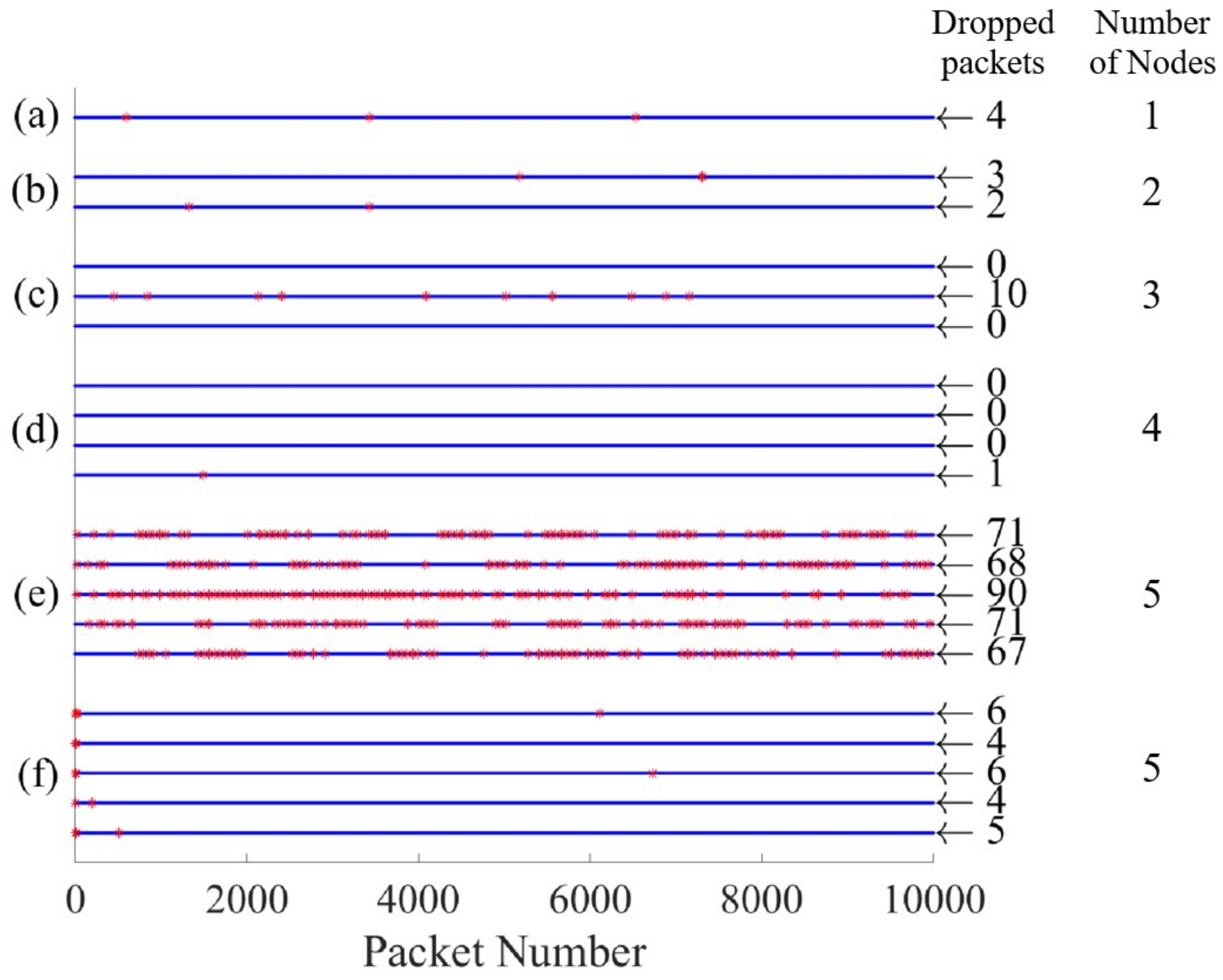
2.3.2. Dropped Packets
2.4. Field Work in Durham Cathedral
3. Results
3.1. Data Transfer Rate and Quality
3.2. Angle Data Reliability
3.3. Field Work in Durham Cathedral Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Majer, J.; Niederwanger, G. Observations during stabilisation of old bell towers damaged by cracks. Eng. Fracture Mech. 1990, 35, 493–499. [Google Scholar] [CrossRef]
- Bart, A.P.H. Bell Towers and Bell Hanging an Appeal to Architects; Longmans, Green and CO.: Harlow, UK, 1914. [Google Scholar]
- Ivorra, S.; Pallares, F.J.; Adam, J.M. Dynamic behaviour of a modern bell tower—A case study. Eng. Struct. 2009, 31, 1085–1092. [Google Scholar] [CrossRef]
- Lewis, E. Calculation of the Forces Acting upon a Church Tower; Central Council of Church Bell Ringers: London, UK, 1914. [Google Scholar]
- Heyman, J.; Threlfall, B. Inertia forces due to bellringing. Int. J. Mech. Sci. 1976, 18, 161–164. [Google Scholar] [CrossRef]
- Wilson, J.; Selby, A. Durham cathedral tower vibrations during bell ringing. In Engineering A Cathedral Durham; ICE Publishing: London, UK, 1993; pp. 77–100. [Google Scholar]
- Lund, J.; Selby, A.; Wilson, J. The dynamics of bell towers—A survey in northeast England. Trans. Built Environ. 1995, 15, 45–52. [Google Scholar]
- Selby, A.; Wilson, J. The structural safety and acceptability of bell towers. Trans. Built Environ. 1997, 26, 321–331. [Google Scholar]
- Smith, R.; Hunt, H. Vibration of bell towers excited by bell ringing—A new approach to analysis. In Proceedings of the International Conference on Noise and Vibration Engineering, Leuven, Belgium, 15–17 September 2008. [Google Scholar]
- Other Ringing Styles. Available online: http://jaharrison.me.uk/BellsAreRinging/styles.html (accessed on 9 March 2018).
- Mercier, H.; Ammann, W.J.; Deischl, F.; Eisenmann, J.; Floegl, I.; Hirsch, G.H.; Klein, G.K.; Lande, G.J.; Mahrenholtz, O.; Natke, H.G.; et al. Vibration Problems in Structures: Practical Guidelines; Springer Science & Business Media: New York, NY, USA, 1995. [Google Scholar]
- Sabato, A.; Feng, M.Q.; Fukuda, Y.; Carni, D.L.; Fortino, G. A Novel Wireless Accelerometer Board for Measuring Low-Frequency and Low-Amplitude Structural Vibration. J. IEEE Sens. J. 2016, 16, 2942–2949. [Google Scholar] [CrossRef]
- Kilic, G.; Unluturk, M.S. Testing of wind turbine towers using wireless sensor network and accelerometer. Renew. Energy 2015, 75, 318–325. [Google Scholar] [CrossRef]
- Hughes, J.; Yan, J.; Soga, K. Development of Wireless Sensor Network Using Bluetooth Low Energy (BLE) For Construction Noise Monitoring. Int. J. Smart Sens. Intell. Syst. 2015, 8, 1379–1405. [Google Scholar] [CrossRef]
- Zhao, X.; Geng, S.; Coulibaly, B.M. Path-Loss Model Including LOS-NLOS Transition Regions for Indoor Corridors at 5 GHz. IEEE Antennas Propag. Mag. 2013, 55, 217–223. [Google Scholar] [CrossRef]
- Comparing Low-Power Wireless Technologies. Available online: https://www.digikey.co.uk/en/articles/techzone/2017/oct/comparing-low-power-wireless-technologies (accessed on 9 October 2017).
- Trends in Wide Area IP Traffic Patterns. Available online: http://www.utdallas.edu/~kxs028100/Papers/ trends-in-wide-area-ip-traffic-patterns.pdf (accessed on 13 February 2018).
- Stallings, W. Data and Computer Communications; Pearson: London, UK, 2013; pp. 487–495. [Google Scholar]
- ESP8266 THING Breakout and Development Board for ESP8266 Wi-Fi Soc. Available online: https://goo.gl/ maU7NA (accessed on 13 February 2018).
- ESP8266 Thing Hookup Guide. Available online: https://learn.sparkfun.com/tutorials/esp8266-thinghookup-guide (accessed on 13 February 2018).
- Arduino MKR1000. Available online: https://bit.ly/2CCzy97 (accessed on 22 January 2019).
- Arduino MKR1000. Available online: https://goo.gl/hV1dbd (accessed on 13 February 2018).
- RASPBERRY PI HARDWARE. Available online: https://www.raspberrypi.org/documentation/hardware/ raspberrypi/README.md (accessed on 13 February 2018).
- Raspberry Pi Zero W. Available online: https://shop.pimoroni.com/products/raspberry-pi-zero-w (accessed on 13 February 2018).
- ESP8266EX Datasheet. Available online: https://cdn-shop.adafruit.com/product-files/2471/0A-ESP8266_ _Datasheet__EN_v4.3.pdf (accessed on 13 February 2018).
- ATSAMW25-MR210PB. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-42618-SmartConnect-ATSAMW25-MR210PB_Datasheet.pdf (accessed on 13 February 2018).
- CYW43438. Available online: http://www.cypress.com/file/298076/download (accessed on 13 February 2018).
- TDK InvenSense MPU-9250. Available online: https://www.digikey.co.uk/product-detail/en/tdkinvensense/MPU-9250/1428-1019-1-ND/4626450 (accessed on 23 February 2018).
- TDK InvenSense MPU-6050. Available online: https://www.digikey.co.uk/product-detail/en/tdkinvensense/MPU-6050/1428-1007-1-ND/4038010 (accessed on 23 February 2018).
- STMicroelectronics LSM9DS1TR. Available online: https://www.digikey.co.uk/product-detail/en/ stmicroelectronics/LSM9DS1TR/497-14946-1-ND/4988079 (accessed on 23 February 2018).
- 9 Degrees of Freedom IMU Breakout—MPU-9250. Available online: https://goo.gl/SPVqQi (accessed on 23 February 2018).
- Triple Axis Accelerometer + Gyro Breakout—MPU-6050. Available online: https://coolcomponents.co.uk/ products/triple-axis-accelerometer-gyro-breakout-mpu-6050 (accessed on 23 February 2018).
- SparkFun 9 Degrees of Freedom IMU Breakout—LSM9DS1. Available online: http://www.hobbytronics.co.uk/lsm9ds1-9dof (accessed on 23 February 2018).
- Fernandez-Madrigal, J.-A.; Claraco, J.L.B. Simultaneous Localization and Mapping for Mobile Robots: Introduction and Methods, Information Science Reference; IGI Publishing: Hershey, PA, USA, 2012. [Google Scholar]
- 9DoF Razor IMU M0 Hookup Guide. Available online: https://learn.sparkfun.com/tutorials/9dof-razorimu-m0-hookup-guide/introduction (accessed on 9 March 2018).
- MPU-9250. Available online: https://www.invensense.com/products/motion-tracking/9-axis/mpu-9250/ (accessed on 18 January 2018).
- Ringing Themes. Available online: https://cccbr.org.uk/services/pr/publicity/themes/ (accessed on 9 March 2018).
- Thompson, P.D.; Colebatch, J.G.; Brown, P.; Rothwell, J.C.; Day, B.L.; Obeso, J.A.; Marsden, C.D. Voluntary stimulus—Sensitive jerks and jumps mimicking myoclonus or pathological startle syndromes. Mov. Disord. 1992, 7, 257–262. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Max Nodes | Data Rate (Mb/s) | Range (m) | |
|---|---|---|---|
| Requirements | ≥10 | ≥4.064 | >10 |
| Wi-Fi | 255 | 6 | 100 |
| Zigbee | 255 | 0.244 | 50 |
| Bluetooth | 7 | 1 | 10 |
| BLE | 7 | 1 | 100 |
| Protocol | Header Size (Byte) | Speed | Flow Control | Error Checking | Error Recovery |
|---|---|---|---|---|---|
| UDP | 8 | High | No | Yes | No |
| TCP | 20 | Low | Yes | Yes | Yes |
| Ease of Manufacture | Area (cm2) | Documentation Quality * | |
|---|---|---|---|
| Requirements | Straightforward | <50 | Good |
| MKR1000 | Straightforward | 16.25 | Good |
| Pi Zero W | Difficult | 19.50 | Poor |
| ESP8266 Thing | Straightforward | 14.35 | Poor |
| Chip Price (£) | Breakout Price (£) | Quaternion Calculation | Part Status | |
|---|---|---|---|---|
| Requirements | – | – | Yes | Active |
| MPU-9250 | 7.48 | 14.95 | Yes | Active |
| MPU-6050 | 5.84 | 34.03 | Yes | Not active |
| LSM9DS1 | 4.46 | 9.20 | No | Active |
| Group | No. of Nodes | Total Packet Loss (%) |
|---|---|---|
| (a) | 1 | 0.0400 |
| (b) | 2 | 0.0250 |
| (c) | 3 | 0.0333 |
| (d) | 4 | 0.0025 |
| (e) | 5 | 0.7340 |
| (f) | 5 (Wi-Fi box) | 0.0500 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meech, J.; Crabtree, C.; Rácz, Z. Star Type Wireless Sensor Network for Future Distributed Structural Health Monitoring Applications. Inventions 2019, 4, 6. https://doi.org/10.3390/inventions4010006
Meech J, Crabtree C, Rácz Z. Star Type Wireless Sensor Network for Future Distributed Structural Health Monitoring Applications. Inventions. 2019; 4(1):6. https://doi.org/10.3390/inventions4010006
Chicago/Turabian StyleMeech, James, Christopher Crabtree, and Zoltán Rácz. 2019. "Star Type Wireless Sensor Network for Future Distributed Structural Health Monitoring Applications" Inventions 4, no. 1: 6. https://doi.org/10.3390/inventions4010006
APA StyleMeech, J., Crabtree, C., & Rácz, Z. (2019). Star Type Wireless Sensor Network for Future Distributed Structural Health Monitoring Applications. Inventions, 4(1), 6. https://doi.org/10.3390/inventions4010006