
Dangerous Overtaking of Cyclists in Montréal



Abstract
:1. Introduction
1.1. Factors Associated with Characteristics of the Road Network
1.2. Factors Associated with Traffic
1.3. Factors Associated to Cyclists
1.4. Research Objectives
2. Materials and Methods
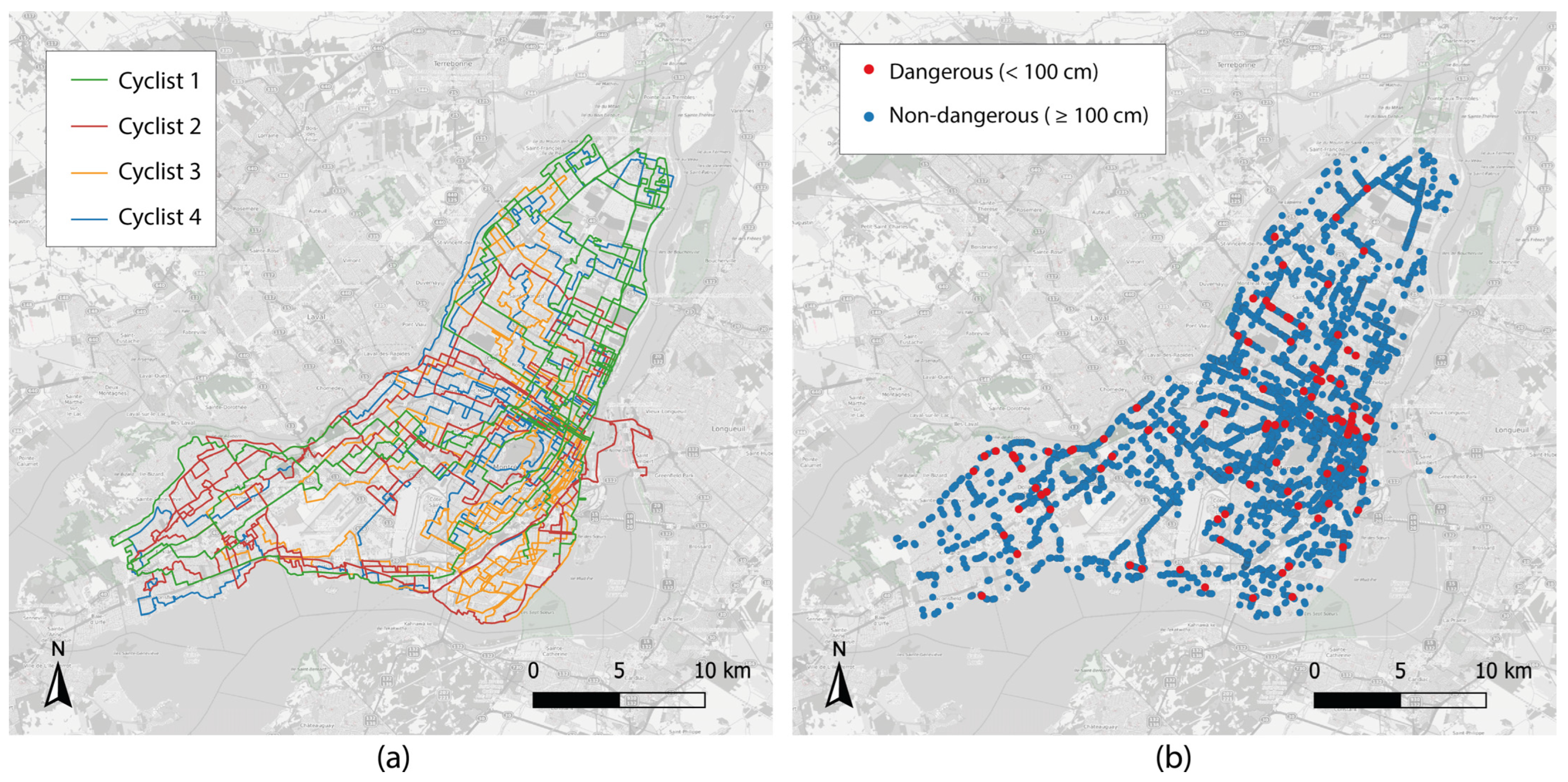
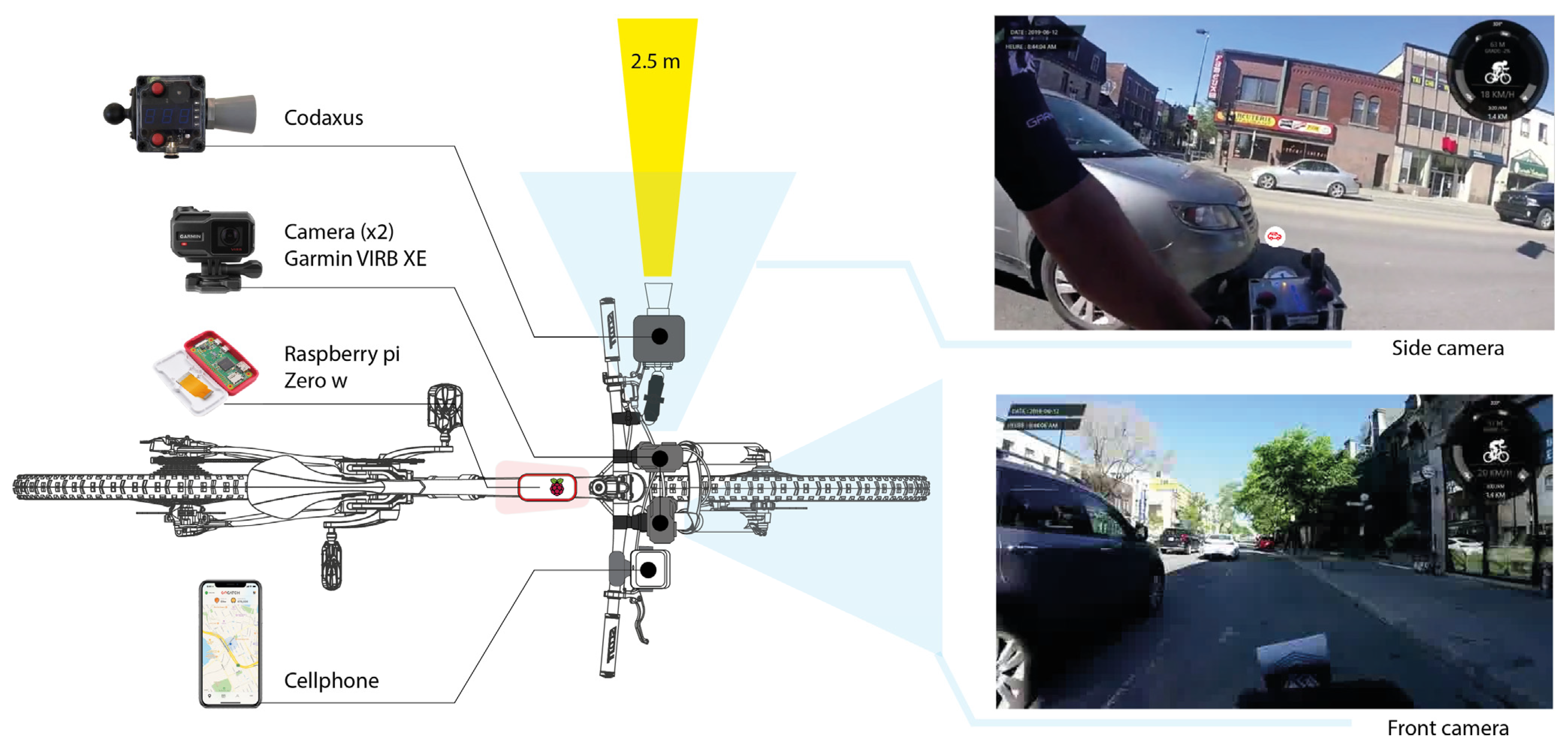
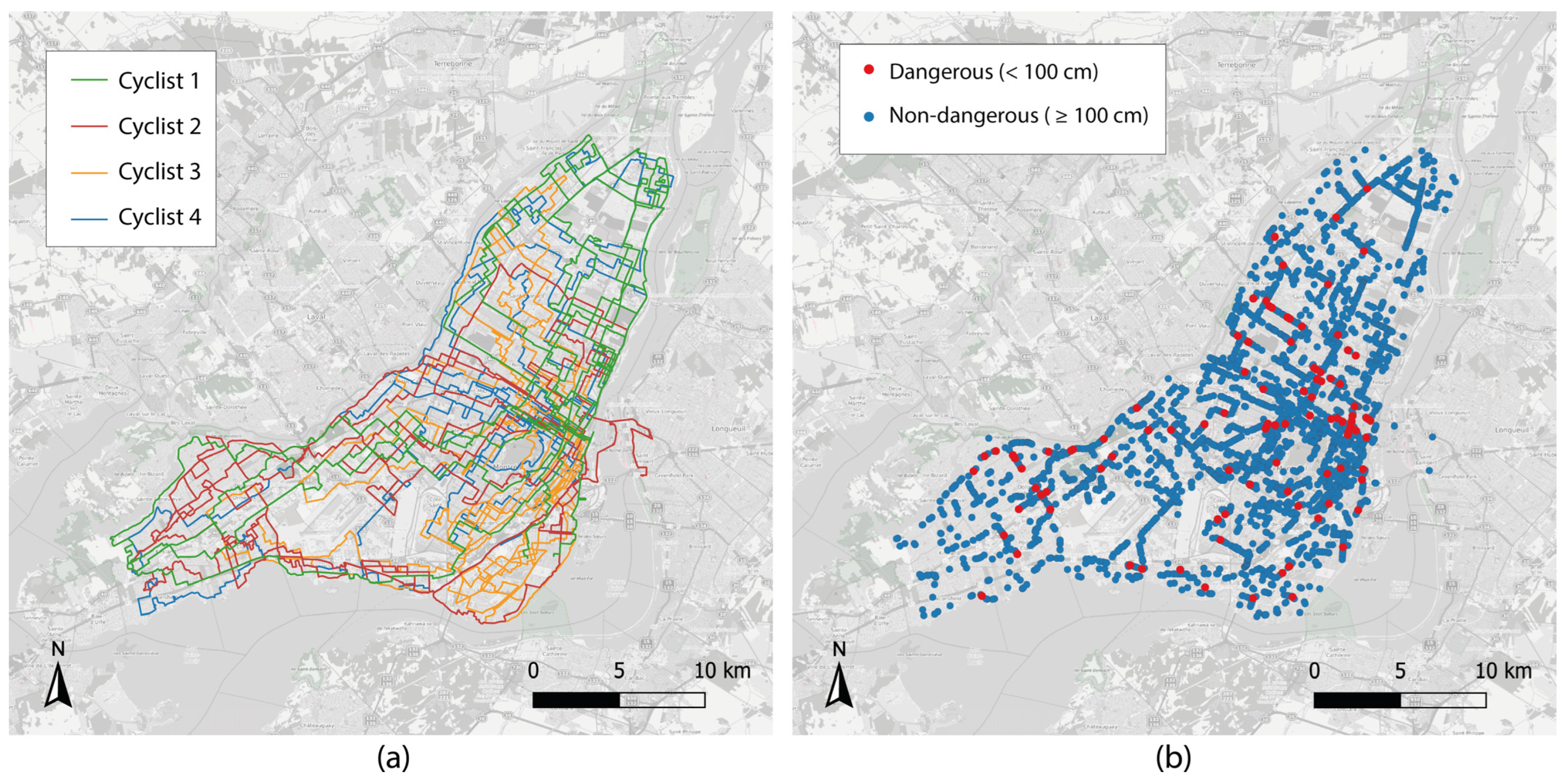
2.1. Study Area and Primary Data Collection
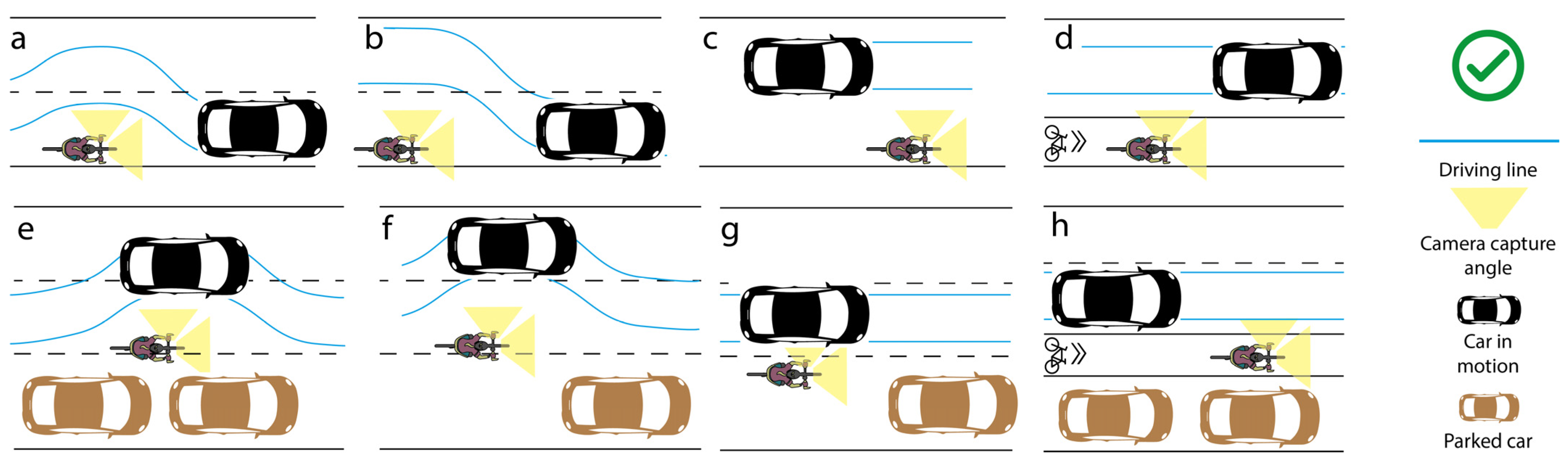
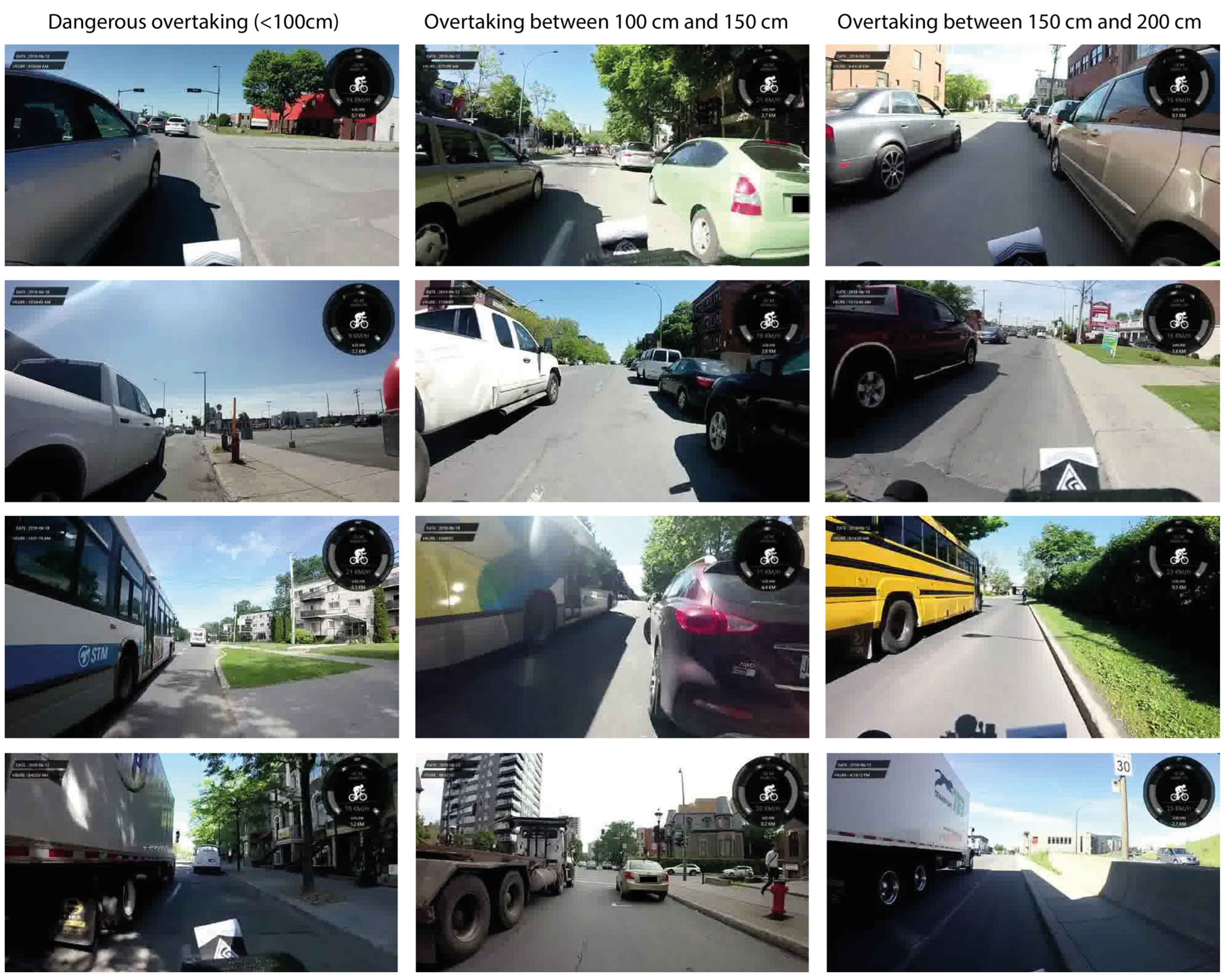
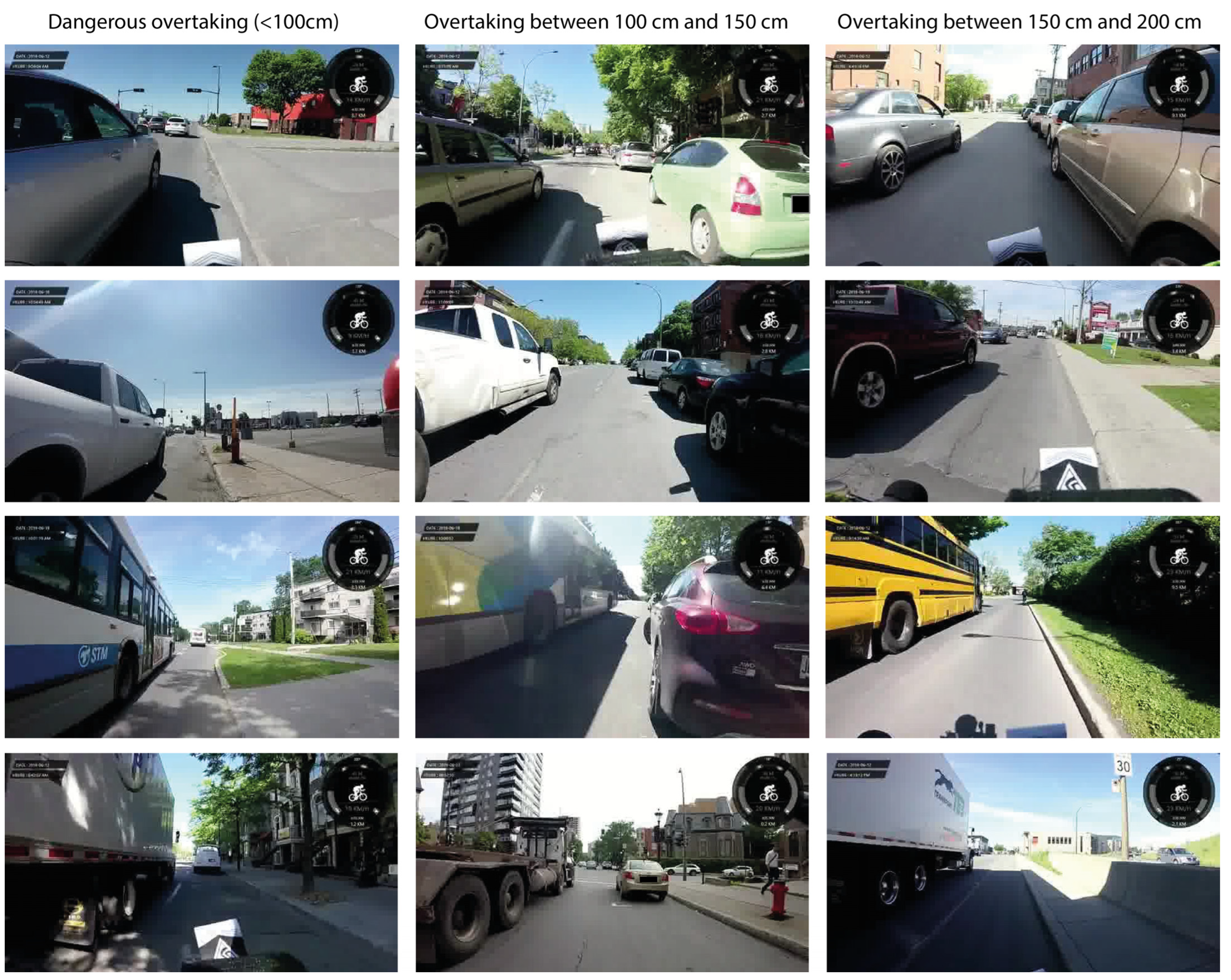
2.2. Operational Definition of Overtaking
2.3. Structuring of Data
2.4. Modelling
3. Results
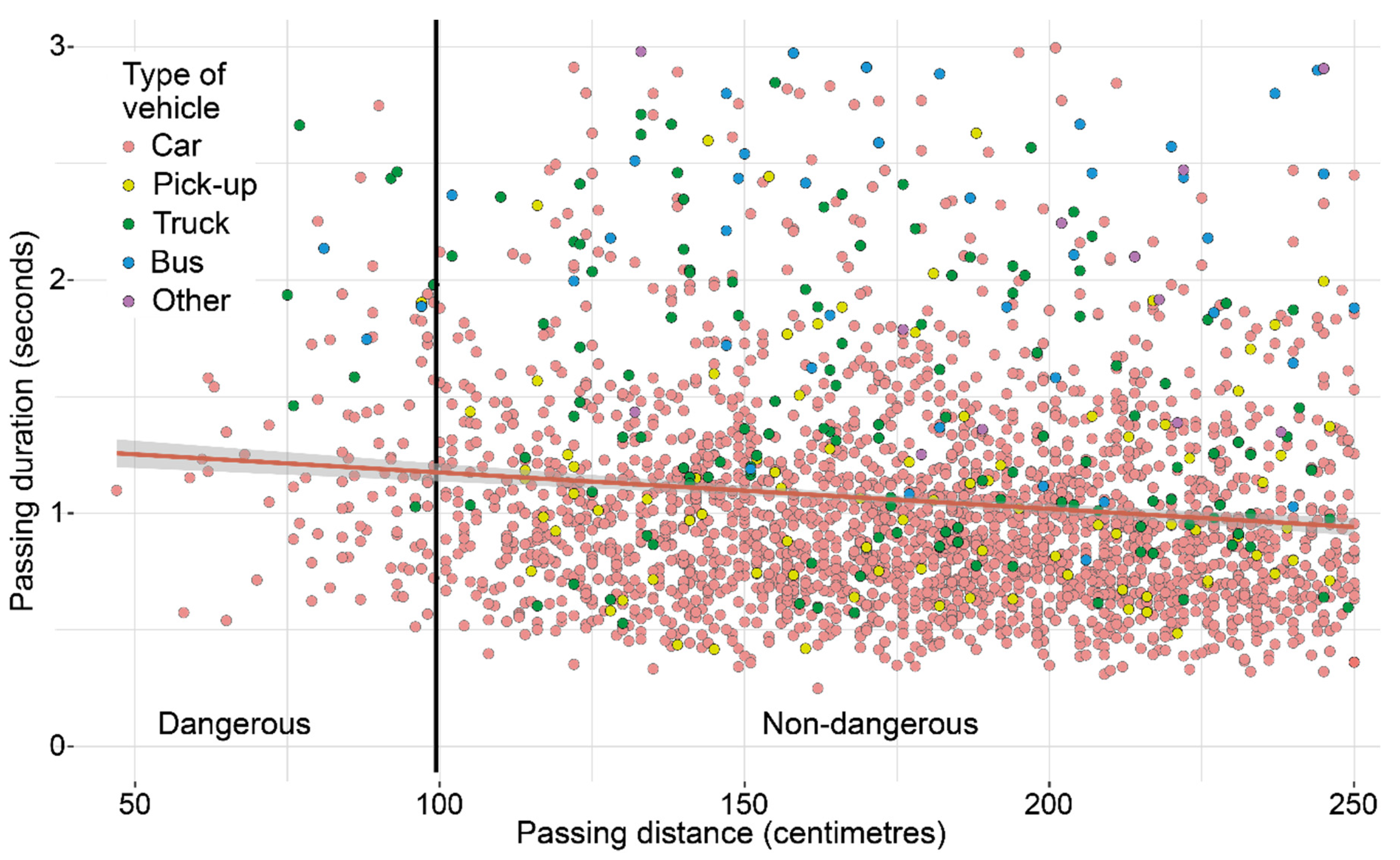
3.1. Descriptive Statistics
3.2. Results of the Generalized Additive Logit Regression
3.2.1. Control Variables Effects
3.2.2. Effects off Factors Associated to Characteristics of the Road Network
3.2.3. Effects of Factors Associated to Traffic
3.2.4. Effects of Factors Associated to Cyclists
4. Discussion
4.1. Limits of the Study
4.1.1. Accuracy of the Passing Duration Measurement
4.1.2. Real-Time Traffic Indicators
4.2. Contribution to Academic Knowledge
4.3. Implications for Decision-Makers
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Garrard, J.; Rissel, C.; Bauman, A. City Cycling; MIT Press: Cambridge, MA, USA, 2012; pp. 31–56. [Google Scholar]
- Buehler, R.; Pucher, J. Trends in Walking and Cycling Safety: Recent Evidence from High-Income Countries, with a Focus on the United States and Germany. Am. J. Public Health 2017, 107, 281–287. [Google Scholar] [CrossRef] [PubMed]
- Pucher, J.; Dijkstra, L. Promoting Safe Walking and Cycling to Improve Public Health: Lessons from the Netherlands and Germany. Am. J. Public Health 2003, 93, 1509–1516. [Google Scholar] [CrossRef]
- Furth, P.G. Bicycling infrastructure for mass cycling: A transatlantic comparison. In City Cycling; MIT Press: Cambridge, MA, USA, 2012; pp. 105–140. [Google Scholar]
- Vélo Québec L’état du vélo à Montréal en 2020. Available online: https://www.velo.qc.ca/wp-content/uploads/2021/06/vq-edv2020-fr.pdf (accessed on 26 February 2021).
- Houde, M.; Apparicio, P.; Séguin, A.-M. A Ride for Whom: Has Cycling Network Expansion Reduced Inequities in Accessibility in Montreal, Canada? J. Transp. Geogr. 2018, 68, 9–21. [Google Scholar] [CrossRef]
- Montréal Collisions Routières—Jeu de Données. Available online: https://donnees.montreal.ca/ville-de-montreal/collisions-routieres (accessed on 2 February 2021).
- Beck, B.; Stevenson, M.; Newstead, S.; Cameron, P.; Judson, R.; Edwards, E.R.; Bucknill, A.; Johnson, M.; Gabbe, B. Bicycling Crash Characteristics: An in-Depth Crash Investigation Study. Accid. Anal. Prev. 2016, 96, 219–227. [Google Scholar] [CrossRef] [PubMed]
- SAAQ Partage de la Route. Available online: https://saaq.gouv.qc.ca/securite-routiere/moyens-deplacement/auto/partage-de-la-route/ (accessed on 2 February 2021).
- Apasnore, P.; Ismail, K.; Kassim, A. Bicycle-Vehicle Interactions at Mid-Sections of Mixed Traffic Streets: Examining Passing Distance and Bicycle Comfort Perception. Accid. Anal. Prev. 2017, 106, 141–148. [Google Scholar] [CrossRef] [PubMed]
- Beck, B.; Chong, D.; Olivier, J.; Perkins, M.; Tsay, A.; Rushford, A.; Li, L.; Cameron, P.; Fry, R.; Johnson, M. How Much Space Do Drivers Provide When Passing Cyclists? Understanding the Impact of Motor Vehicle and Infrastructure Characteristics on Passing Distance. Accid. Anal. Prev. 2019, 128, 253–260. [Google Scholar] [CrossRef] [PubMed]
- Chuang, K.-H.; Hsu, C.-C.; Lai, C.-H.; Doong, J.-L.; Jeng, M.-C. The Use of a Quasi-Naturalistic Riding Method to Investigate Bicyclists’ Behaviors When Motorists Pass. Accid. Anal. Prev. 2013, 56, 32–41. [Google Scholar] [CrossRef] [PubMed]
- Debnath, A.K.; Haworth, N.; Schramm, A.; Heesch, K.C.; Somoray, K. Factors Influencing Noncompliance with Bicycle Passing Distance Laws. Accid. Anal. Prev. 2018, 115, 137–142. [Google Scholar] [CrossRef] [PubMed]
- Dozza, M.; Schindler, R.; Bianchi-Piccinini, G.; Karlsson, J. How Do Drivers Overtake Cyclists? Accid. Anal. Prev. 2016, 88, 29–36. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feng, F.; Bao, S.; Hampshire, R.C.; Delp, M. Drivers Overtaking Bicyclists—An Examination Using Naturalistic Driving Data. Accid. Anal. Prev. 2018, 115, 98–109. [Google Scholar] [CrossRef] [PubMed]
- Llorca, C.; Angel-Domenech, A.; Agustin-Gomez, F.; Garcia, A. Motor Vehicles Overtaking Cyclists on Two-Lane Rural Roads: Analysis on Speed and Lateral Clearance. Saf. Sci. 2017, 92, 302–310. [Google Scholar] [CrossRef]
- Mehta, K.; Mehran, B.; Hellinga, B. Evaluation of the Passing Behavior of Motorized Vehicles When Overtaking Bicycles on Urban Arterial Roadways. Transp. Res. Rec. 2015, 2520, 8–17. [Google Scholar] [CrossRef]
- Parkin, J.; Meyers, C. The Effect of Cycle Lanes on the Proximity between Motor Traffic and Cycle Traffic. Accid. Anal. Prev. 2010, 42, 159–165. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shackel, S.C.; Parkin, J. Influence of Road Markings, Lane Widths and Driver Behaviour on Proximity and Speed of Vehicles Overtaking Cyclists. Accid. Anal. Prev. 2014, 73, 100–108. [Google Scholar] [CrossRef] [PubMed]
- Walker, I. Drivers Overtaking Bicyclists: Objective Data on the Effects of Riding Position, Helmet Use, Vehicle Type and Apparent Gender. Accid. Anal. Prev. 2007, 39, 417–425. [Google Scholar] [CrossRef] [PubMed]
- Walker, I.; Garrard, I.; Jowitt, F. The Influence of a Bicycle Commuter’s Appearance on Drivers’ Overtaking Proximities: An on-Road Test of Bicyclist Stereotypes, High-Visibility Clothing and Safety Aids in the United Kingdom. Accid. Anal. Prev. 2014, 64, 69–77. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Apparicio, P.; Maignan, D.; Gelb, J. VIFECO: An Open-Source Software for Counting Features on a Video. J. Open Res. Softw. 2021, 9, 1–9. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for statistical computing: Vienna, Austria, 2021. [Google Scholar]
- Wood, S.N. Fast Stable Restricted Maximum Likelihood and Marginal Likelihood Estimation of Semiparametric Generalized Linear Models. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2011, 73, 3–36. [Google Scholar] [CrossRef] [Green Version]
- Włodarek, P.; Olszewski, P. Traffic Safety on Cycle Track Crossings—Traffic Conflict Technique. J. Transp. Saf. Secur. 2020, 12, 194–209. [Google Scholar] [CrossRef]
- Carvajal, G.A.; Sarmiento, O.L.; Medaglia, A.L.; Cabrales, S.; Rodríguez, D.A.; Quistberg, D.A.; López, S. Bicycle Safety in Bogotá: A Seven-Year Analysis of Bicyclists’ Collisions and Fatalities. Accid. Anal. Prev. 2020, 144, 105596. [Google Scholar] [CrossRef]
- Rahman, Z.; Mattingly, S.; Kawadgave, R.; Nostikasari, D.; Roeglin, N.; Casey, C.; Johnson, T. Using Crowd Sourcing to Locate and Characterize Conflicts for Vulnerable Modes. Accid. Anal. Prev. 2019, 128, 32–39. [Google Scholar] [CrossRef] [PubMed]
- Schleinitz, K.; Petzoldt, T.; Franke-Bartholdt, L.; Krems, J.; Gehlert, T. Conflict Partners and Infrastructure Use in Safety Critical Events in Cycling—Results from a Naturalistic Cycling Study. Transp. Res. Part F Traffic Psychol. Behav. 2015, 31, 99–111. [Google Scholar] [CrossRef]
- Apparicio, P.; Gelb, J. Cyclists’ Exposure to Road Traffic Noise: A Comparison of Three North American and European Cities. In Acoustics; Multidisciplinary Digital Publishing Institute: Basel, Switzerland, 2020; Volume 2, pp. 73–86. [Google Scholar]
- Gelb, J.; Apparicio, P. Modelling Cyclists’ Multi-Exposure to Air and Noise Pollution with Low-Cost Sensors—The Case of Paris. Atmosphere 2020, 11, 422. [Google Scholar] [CrossRef] [Green Version]
- Gelb, J.; Apparicio, P. Noise Exposure of Cyclists in Ho Chi Minh City: A Spatio-Temporal Analysis Using Non-Linear Models. Appl. Acoust. 2019, 148, 332–343. [Google Scholar] [CrossRef]
- Gelb, J.; Apparicio, P. Cyclists’ Exposure to Atmospheric and Noise Pollution: A Systematic Literature Review. Transp. Rev. 2021, 41, 742–765. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Li, G.; Song, Z.; Fu, Q. A New Method of Image Detection for Small Datasets under the Framework of YOLO Network. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1031–1035. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Name | Modality | Dimension | Family |
|---|---|---|---|---|
| Outcome | Type of overtaking | Dangerous (<100 cm), Non-dangerous (≥100 cm) | - | Binomial |
| Control | Participant | Cyclist ID | FC | Categorical |
| Day of collection | 12, 17, 18, 19, 21 (June 2019) | FT | Categorical | |
| Time of the day | Number of minutes since 08:00 | FT | Continuous | |
| Geographical position | Geographic coordinates (x,y) | FT | Continuous | |
| Predictor | Type of road | Primary road, secondary road, tertiary road, residential street and unclassified street | FR | Categorical |
| Bike lane | Presence. Absence | FR | Binomial | |
| On-street parked vehicles | Presence. Absence | FR | Binomial | |
| Type of vehicle | Car, truck, bus, pick-up and other | FT | Categorical | |
| Passing duration | Logarithm of time between the end and the beginning of the lateral passing (in seconds) | FT | Continuous | |
| Cyclist speed | Speed at the moment of lateral passing (km/h) | FC | Continuous |
| Variable | Lateral Passing | Passing Distance Less than 250 cm | Passing Distance 250 and Over | ||||||
|---|---|---|---|---|---|---|---|---|---|
| All | <100 cm | Ratio | n | % | Mean | SD | n | % | |
| Primary road | 372 | 24 | 16 | 256 | 4 | 158 | 46 | 116 | 31.2 |
| Secondary road | 1454 | 48 | 30 | 1066 | 16.5 | 173 | 42 | 388 | 26.7 |
| Tertiary road | 1174 | 27 | 43 | 837 | 12.9 | 180 | 40 | 337 | 28.7 |
| Residential street | 519 | 12 | 43 | 421 | 6.5 | 180 | 39 | 98 | 18.9 |
| Unclassified street | 72 | 0 | 52 | 0.8 | 195 | 35 | 20 | 27.8 | |
| Cycle lane | 439 | 5 | 88 | 340 | 5.2 | 181 | 36 | 99 | 22.6 |
| Shared lane | 28 | 1 | 28 | 24 | 0.4 | 177 | 35 | 4 | 14.3 |
| On-street parked vehicles | 988 | 37 | 27 | 851 | 13.1 | 168 | 168 | 137 | 13.9 |
| Car | 3154 | 94 | 34 | 2315 | 35.7 | 176 | 42 | 839 | 26.6 |
| Pick-up | 131 | 3 | 44 | 95 | 1.5 | 176 | 43 | 36 | 27.5 |
| Truck | 223 | 9 | 25 | 156 | 2.4 | 171 | 43 | 67 | 30 |
| Bus | 62 | 5 | 12 | 50 | 0.8 | 172 | 49 | 12 | 19.4 |
| Other | 21 | 0 | 16 | 0.2 | 189 | 39 | 5 | 23.8 | |
| Total | 3591 | 111 | 32 | 2632 | 73.3 | 176 | 42 | 959 | 26.7 |
| All Passings | Dangerous Passing Less than 100 cm | Non-Dangerous Passing 100 cm and Over | Diff. | ||||
|---|---|---|---|---|---|---|---|
| Variable | Mean | Median | Mean | Median | Mean | Median | Mean |
| Primary road | 1.018 | 0.867 | 1.512 | 1.515 | 0.984 | 0.849 | 0.528 |
| Secondary road | 1.099 | 0.924 | 1.548 | 1.238 | 1.084 | 0.916 | 0.464 |
| Tertiary road | 1.014 | 0.856 | 1.693 | 1.161 | 0.998 | 0.850 | 0.695 |
| Residential street | 1.240 | 1.080 | 1.624 | 1.290 | 1.231 | 1.075 | 0.393 |
| Unclassified street | 1.045 | 0.821 | -- | -- | 1.045 | 0.821 | -- |
| Bicycle lane | 1.132 | 0.970 | 2.538 | 2.136 | 1.116 | 0.968 | 1.422 |
| Shared lane | 1.350 | 1.144 | 3.892 | 3.892 | 1.256 | 1.136 | 2.636 |
| On-street parked vehicles | 1.136 | 0.969 | 1.788 | 1.488 | 1.110 | 0.954 | 0.678 |
| Car | 0.993 | 0.876 | 1.384 | 1.157 | 0.981 | 0.868 | 0.403 |
| Pick-up | 1.201 | 0.972 | 3.249 | 3.858 | 1.153 | 0.967 | 2.096 |
| Truck | 1.756 | 1.344 | 2.142 | 1.980 | 1.739 | 1.329 | 0.403 |
| Bus | 2.318 | 2.180 | 3.336 | 2.136 | 2.228 | 2.180 | 1.108 |
| Other | 2.954 | 1.916 | -- | -- | 2.954 | 1.916 | -- |
| Total | 1.082 | 0.908 | 1.583 | 1.236 | 1.066 | 0.900 | 0.517 |
| Variables | OR 1 | OR CI (95%) 2 | |
|---|---|---|---|
| Intercept | 0.025 | 0.008 | 0.078 |
| Control variables | |||
| Wednesday, June 12 (ref.) | Ref. | ||
| Monday, June 17 | 0.606 | 0.293 | 1.251 |
| Tuesday, June 18 | 0.823 | 0.435 | 1.556 |
| Wednesday, June 19 | 0.714 | 0.386 | 1.321 |
| Friday, June 21 | 0.711 | 0.344 | 1.471 |
| Cyclist 1 (male) | Ref. | ||
| Cyclist 2 (male) | 1.330 | 0.639 | 2.770 |
| Cyclist 3 (female) | 1.653 | 0.860 | 3.179 |
| Cyclist 4 (male) | 1.735 | 0.911 | 3.305 |
| Splines | Edf 3 | P | |
| Time of the day | 1.000 | 0.616 | |
| Geographical position | 11.002 | 0.004 | |
| Predictor variables | OR 1 | OR CI (95%) 2 | |
| Residential or unclassified street Unclassified | Ref. | ||
| Primary road | 5.608 | 2.518 | 12.491 |
| Secondary road | 2.430 | 1.223 | 4.827 |
| Tertiary road | 1.424 | 0.687 | 2.951 |
| Bicycle lane | 0.423 | 0.166 | 1.078 |
| On-street parked vehicle | 1.954 | 1.220 | 3.129 |
| Car | Ref. | ||
| Pick-up | 0.555 | 0.169 | 1.827 |
| Truck + Other | 0.472 | 0.215 | 1.036 |
| Bus | 1.117 | 0.383 | 3.258 |
| Log(passing duration) | 4.660 | 3.197 | 6.793 |
| Cyclist speed (km/h) | 0.945 | 0.902 | 0.991 |
| Fit statistics | |||
| n | 3591 | ||
| R 2 Nagelkerke | 0.159 | ||
| Deviance explained | 0.142 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Henao, A.; Apparicio, P. Dangerous Overtaking of Cyclists in Montréal. Safety 2022, 8, 16. https://doi.org/10.3390/safety8010016
Henao A, Apparicio P. Dangerous Overtaking of Cyclists in Montréal. Safety. 2022; 8(1):16. https://doi.org/10.3390/safety8010016
Chicago/Turabian StyleHenao, Andres, and Philippe Apparicio. 2022. "Dangerous Overtaking of Cyclists in Montréal" Safety 8, no. 1: 16. https://doi.org/10.3390/safety8010016
APA StyleHenao, A., & Apparicio, P. (2022). Dangerous Overtaking of Cyclists in Montréal. Safety, 8(1), 16. https://doi.org/10.3390/safety8010016