1. Introduction
When studying water waves, the consideration of a motion that consists of individual waves of the same frequency and height might provide significant results but is quite idealistic and of limited practical utility. Ocean wave patterns tend to continuously change with time and space in an unrepeatable and non-deterministic manner; therefore, the investigation of real sea states is proven to be highly complex. Considering the complexities, the focus on irregular breaking waves is one of the most challenging tasks. In particular, wave breaking is one of the most interesting phenomena that occurs in shallow waters and also presents very complicated dynamics regarding the fluid’s motion.
Experiments have been widely used for the study of irregular breaking waves; however, during recent years, numerical models of different origins have emerged and gained profound popularity. Reynolds-Averaged Navier–Stokes equations (RANS) constitute a good numerical approach for the modelling of the wave transformation over sloping seabeds [
1]. Classical potential flow theory formulations disregard the influence of viscosity and turbulence production, which plays a significant role in the investigation of surf zone dynamics. Thus, they require a coupling with semi-empirical viscosity models [
2]. In addition, Computational Fluid Dynamics (CFD) has become widely popular due to its cost-effectiveness and relative accuracy in comparison with experiments, as well as its ability to surpass scale effects.
In RANS simulations of regular breaking waves, the problem of turbulence modelling was addressed and highlighted from the beginning. Especially the difficulty of capturing the adverse transformations of the free-surface upon breaking. In particular, Lin and Liu [
1] simulated spilling breakers using a single-phase algebraic
turbulence model and the VOF method. One of their major findings was the sensitivity of the simulated wave profile and the respective turbulent kinetic energy for different turbulence closure approaches. Moreover, Bradford [
3] used
and Re-Normalization Group (RNG)
models to simulate spilling and plunging waves and identified the limitations of VOF in capturing the overturning of a plunging breaker, which according to the author’s opinion, might also be due to the nonphysically large dissipation of the turbulence models. Additionally, Mayer and Madsen [
4] used an ad hoc modification of the TKE production term for the
model by using the mean flow vorticity instead of the mean velocity gradient. Under this scope, the overproduction of TKE and the excessive wave damping in the potential flow pre-breaking regions were eliminated, and the agreement with the experimental results was significantly ameliorated. More recently, Chella [
5] has implemented the Level Set Method (LSM) with a
turbulence model to investigate the wave breaking over a seabed. Brown et al. [
6] conducted an evaluation of different RANS turbulence closure models and compared their accuracy and efficiency regarding the capturing of wave breaking. They showed that the most suitable are the nonlinear
, the
SST and the Reynolds Stress Model. Furthermore, Devolder et al. [
7] identified the issue of the inherent damping of non-breaking waves in the vicinity of the free-surface and developed a Buoyancy Modified
and
SST model to address this issue. The essence of this approach is the transition to a laminar regime in the region where the wave propagates without deforming and the recovery of the turbulence model in the surf zone, where large horizontal density gradients are present. Although results showed an improved agreement with experiments, the author highlighted that the problem of turbulent kinetic energy over-prediction remains unresolved. Larsen and Fuhrman [
8] showed that all the turbulence models in the literature were subject to irrepressible growth of the turbulent kinetic energy, as well as the eddy viscosity, and thus were unconditionally unstable. For this reason, they introduced the Stabilized
SST model, which further limits the eddy viscosity in regions where the flow is nearly potential. Liu et al. [
9] have implemented the modified VOF method with free-surface jump conditions to study wave breaking in order to address the issue of spurious air velocities described by Vukcevic et al. [
10].
Regarding the generation of irregular waves in CFD-based numerical wave tanks, Lara et al. [
11] have presented the application of a method for generating irregular waves through the use of internal wavemakers with a mass-source function. This approach, first introduced by Lin and Liu [
12] proved to be quite precise for the generation of irregular patterns from a given spectrum. More recently, Paulsen et al. [
13] carried out numerical simulations in order to study the irregular wave loads on monopiles. Gatin et al. [
14] developed a framework for simulation of irregular waves using a RANS model coupled with a Higher-Order Spectral (HOS) method, which led to increased computational efficiency.
Even though both of the aforementioned topics have been addressed individually, the literature pertaining to irregular breaking waves that combines these two areas is rather limited. Aggarwal et al. [
15] have developed a method for the numerical simulation of irregular waves and used it for the investigation of breaking wave properties [
16] and the breaking-wave–structure interaction [
17]. However, throughout the described work, the influence of turbulence is not the prime concern and the standard
model is used, despite its known shortcomings. In the present work, an investigation of irregular breaking waves is made using the stabilized
SST model. Initially, the wave generation, the method described in [
12] for producing irregular waves from a given spectrum is slightly modified to fit the in-house solver
MaPFlow. Afterward, the capacity of the solver in the simple propagation of irregular waves is studied, and then two test cases of propagation over a submerged bar and a piecewise sloped seabed are considered, where computational results are compared with available experimental data.
2. Governing Equations
Considering an incompressible fluid medium, the equations of the conservation of mass and momentum, respectively, will be
where
denotes the fluid density,
the velocity vector,
p the pressure,
the source terms and body forces’ density and
the stress tensor.
For the simulation of two-phase flows, the Volume-Of-Fluid (VOF) method [
18] is used, which translates the presence of the liquid or the gas phase in a certain region to the value of the volume fraction
where the index
w corresponds to the liquid phase and
a to the gas phase. It is evident that the volume fraction takes the values 1 and 0 for water and air, respectively, while at the interface of the fluids, it takes an interim value. In this area, which defines the vicinity of the free surface, the properties of the mixture fluid are redefined according to the volume fraction and follow
Moreover, the free surface is treated as a material surface, hence
The artificial compressibility method, proposed by Chorin [
19], is implemented in the present study in order to couple the equations of mass and momentum, through the addition of a fictitious time (
) derivative of pressure
where
is the artificial compressibility factor and regulates the influence of the pseudo-time derivative. In fact, it is a free numerical parameter, which corresponds to a pseudo-sound speed, similar to the sound of speed in compressible flows.
The system that is constituted by Equations (
1), (
2) and (
6) can fully describe viscous two-phase flows.
where
is the preconditioner of Kunz [
20], used in order to counteract the problem of stiff matrices that occur when high-density ratios appear in the eigenvalues of the system. Vector
is the matrix of primitive variables, whereas
are the respective conservative variables. It is worth noticing that the unsteady system of equations is expressed for the conservative variables
at each physical timestep, but at each fictitious timestep, a pseudo-steady state problem is solved for the primitive equations
. The transformation from the latter to the former is achieved through the Jacobian matrix
.
Moreover,
and
denote the inviscid and viscous fluxes, respectively, described as
where
. The velocity
corresponds to the movement of the control volume and
denotes the surface normal of the control volume.
The viscous stresses
, according to Boussinesq’ hypothesis follow,
where
is the turbulent dynamic viscosity,
k is the turbulent kinetic energy and
is the Kronecker delta.
5. Numerical Results
5.1. Submerged Trapezoid Bar
In this section, the developed numerical model is implemented to study the transformation and spectral evolution of irregular waves over a submerged breaker bar. A schematic approach of the numerical wave tank is shown in
Figure 5, which emulates the physical wave tank of the experimental work of Beji and Battjes [
38], against which the numerical results are also compared. The beach that is used in the experiment for the damping of the waves is omitted here, as it is replaced with the forcing zone.
The positions of the wave gauges are chosen to coincide with the experimental gauges for which spectral density results are provided, and they are m, m, m and m. Moreover, two different irregular waves are generated from a JONSWAP-type spectrum, with peak periods of s and s and significant wave heights of m and m, respectively. Following the terminology of the work of Beji and Battjes, the first wave pattern is characterized as long waves due to their relatively large wavelength, and the second as short waves.
Regarding the timestep, was considered adequate to thoroughly capture the wave transformations, while as for mesh selection, a grid with a uniform cell size in the flat-bottom region of m, which becomes denser and reaches m in the region of the bar was created for long waves. However, in order to maintain the philosophy that connects grid properties with the wave features, a much finer mesh was constructed in order to satisfy this condition for the short waves, with the aforementioned cell sizes to be m and m. In the vertical direction, the mesh is relatively dense in the vicinity of the free surface, and it gradually coarsens towards the upper boundary and the lower boundary, while it is also denser in the boundary layer region. The grid sizes for the two wave conditions described above were and cells, respectively.
On what concerns turbulence modelling, the Stabilized SST model discussed above was used with , as prescribed by Larsen and Fuhrman. It should also be clarified that the time history of the free surface elevation in the four gauges does not match the one in the experiment due to a lack of data for the phase angle distribution. Therefore, the soundness of the results is based on the principle that irregular waves generated from the same spectrum will contain the same amount of energy. The number of generated wave components was , with a frequency interval of s−1.
5.1.1. Long Waves
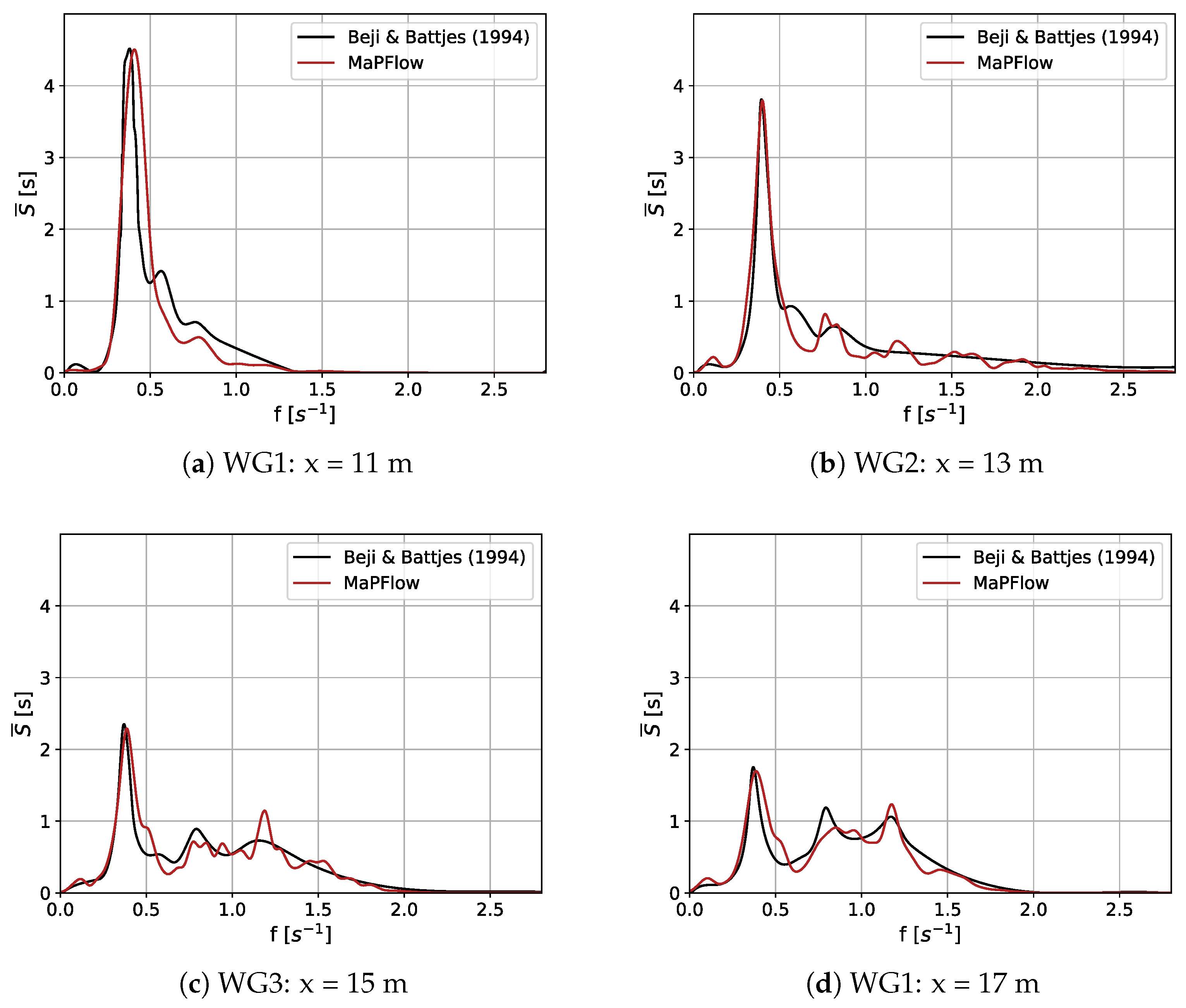
In
Figure 6, the normalized energy density spectrum of the simulated long waves in the four stations of interest is presented. The normalization is made so that the area below the spectrum is equal to unity, and it allows direct comparison between spectra for different wave conditions. In the first gauge, which is located on the upslope side of the bar, the spectral energy has increased due to shoaling, and the spectrum has started becoming broader. In the second station, which is located in the horizontal crest of the bar, a decrease in the height of the peak is noticed and higher harmonics have been generated with spectral density spreading towards them in a way that the total amount of energy is maintained. According to Beji and Battjes, that horizontal region plays a significant role in the transfer of energy to higher harmonics, as it creates a non-dispersive regime for the wave. Hence, that process further occurs in the next station, which is also at the top of the breaker bar, with a quite large portion of energy being distributed to higher frequencies. Finally, in the last gauge, which is located on the downslope side of the bar and the de-shoaling process is dominant and the formation of secondary peaks is observed, while the initial spectral peak decreases further. In that region, wave decomposition takes place, from waves of a certain amplitude into several smaller amplitude waves of similar frequencies, and the spectral shape takes its final form from a narrow-banded to a broad-banded spectrum. From a numerical point of view, this process facilitates the damping of the propagating waves before they reach the boundary of the domain.
The simulated results are generally in good agreement with the experimental, and thus, MaPFlow seems to capture the dispersive and shoaling phenomena of the irregular waves. A quite significant deviation is depicted in the region of shoaling (in the first subfigure), which is also observed by Aggarwal et al. [
15]. A reason for that might be the selected means of spectral density estimation as, in the present work, the Welch Method was used for spectral estimation, which differs from the method that was used in the experiment. Apart from that, the reallocation of the spectral energy to the different frequency ranges is captured accurately, and the formation of the secondary peaks is also evident.
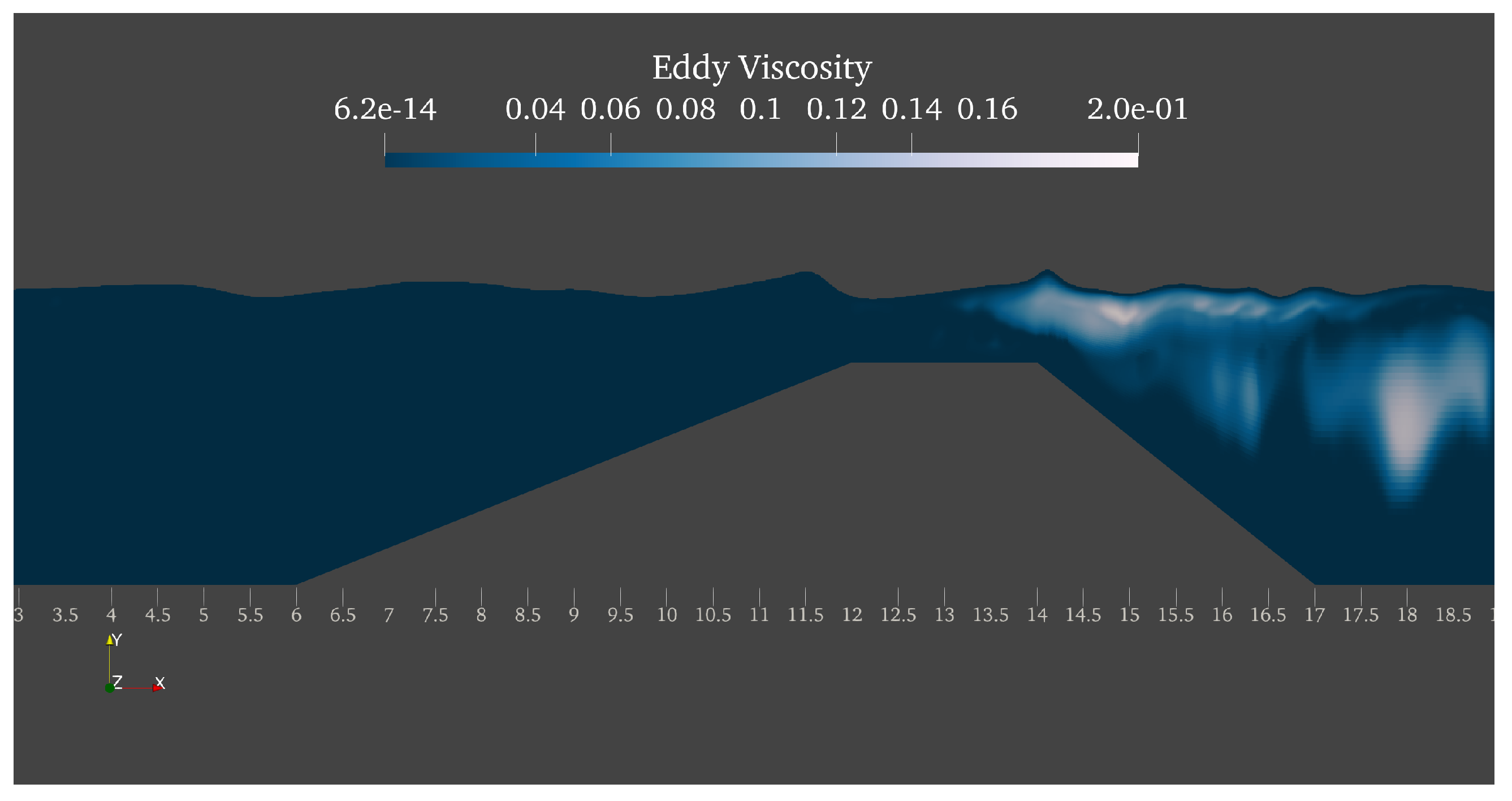
Finally, the eddy viscosity for the case of the long waves is presented in
Figure 7. Due to the random character of the propagating waves, the evolution of this variable in time is also chaotic and random. However, the success of the Stabilized
SST model for the simulation of irregular wave shoaling is quite evident when observing that there is no turbulence production in the region before the bar, while the turbulent viscosity tends to fade during the de-shoaling process.
5.1.2. Short Waves
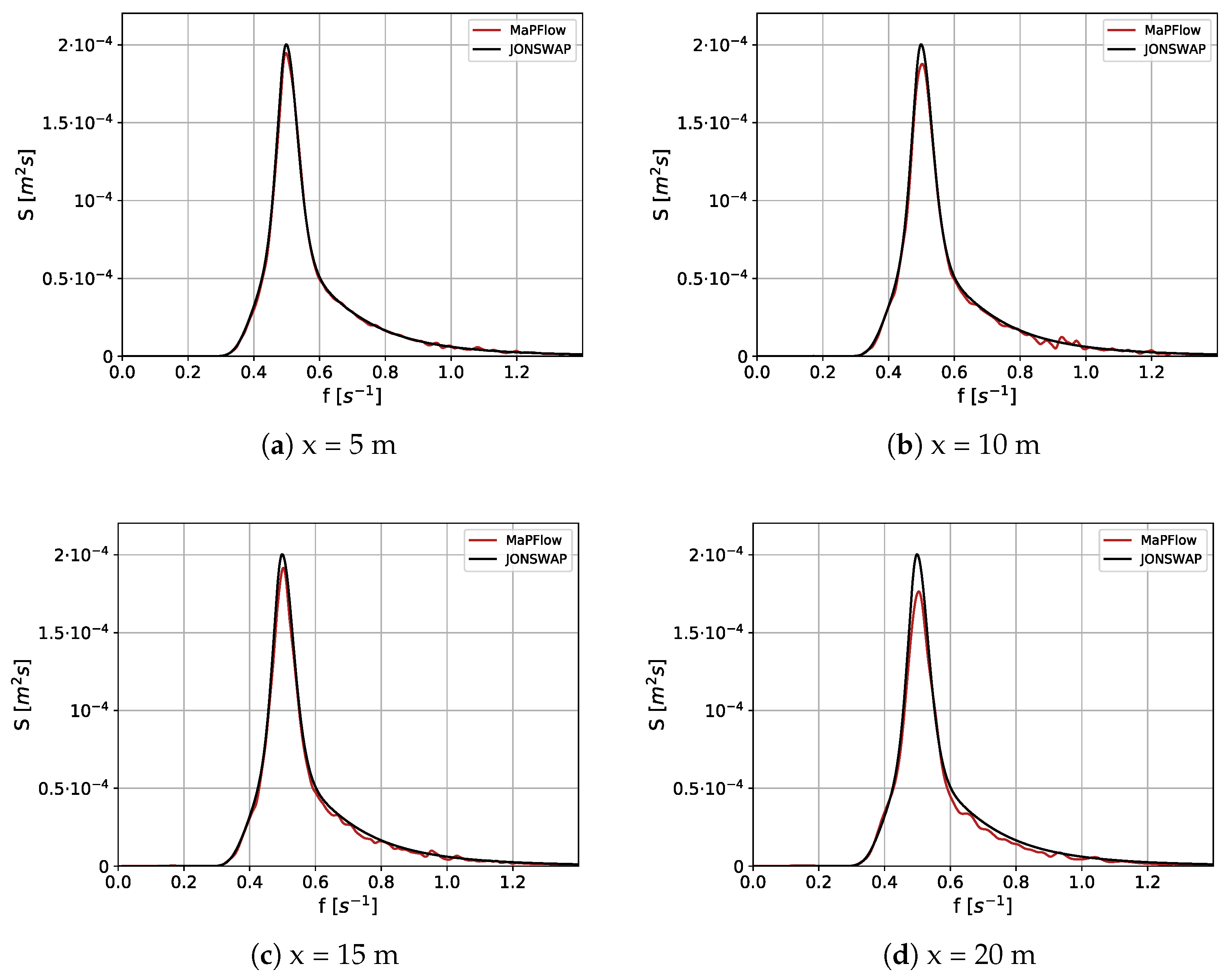
In
Figure 8, the normalized energy density spectrum of the simulated short waves in the four stations of interest is presented. In contrast with the long waves, the spectral evolution, in this case, shows shape reformations on a much smaller scale, whereas higher harmonics are not induced on a primary base. This feature is captured well by
MaPFlow, and the numerical spectrum maintains its initial narrow-banded shape, similar to the experiment.
The contour plot of the turbulent dynamic viscosity is also presented for the short waves in
Figure 9. The trend that is observed in both wave cases is the fact that the emergence of turbulence is strictly located in the region after the bar. Nevertheless, in the short wave simulation, the eddy viscosity is considerably limited in terms of
values, as well as the area of presence, which may be explained by the also limited redistribution of spectral energy to adjacent frequencies.
5.2. Piecewise Sloped Seabed
The analysis of the previous section has been conducted using an arbitrary phase angle distribution, and the soundness of the comparison of the results is derived from the fact that both the experimental and numerical irregular waves have been generated according to the same exact spectrum. On the contrary, in this section, the Free Surface Reconstruction Algorithm [
39] is used in order to attempt to reproduce the exact free-surface time history of the experiments of Adytia et al. [
40] and assess whether the numerical results are in accordance with the experimental wave transformation. A similar approach for the generation of phase-accurate irregular waves and their propagation over the breaker bar of Beji and Battjes [
38] can be found in [
41].
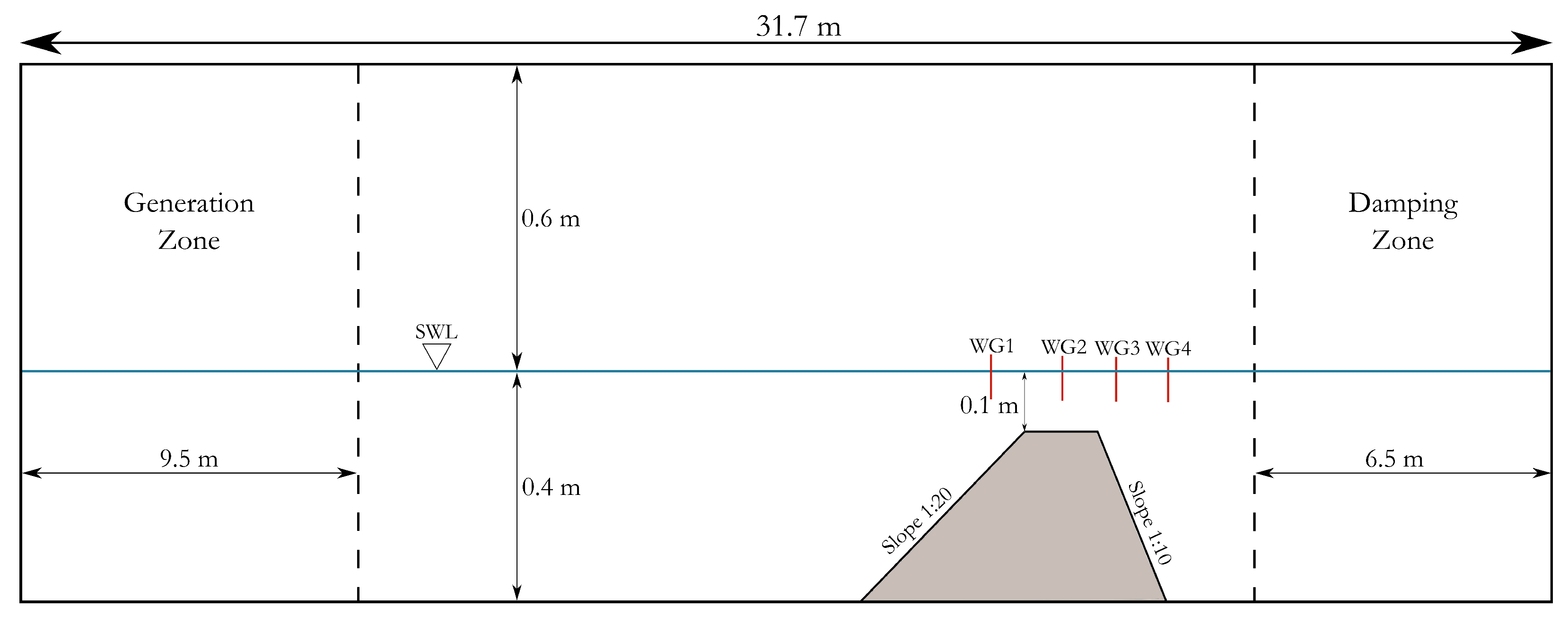
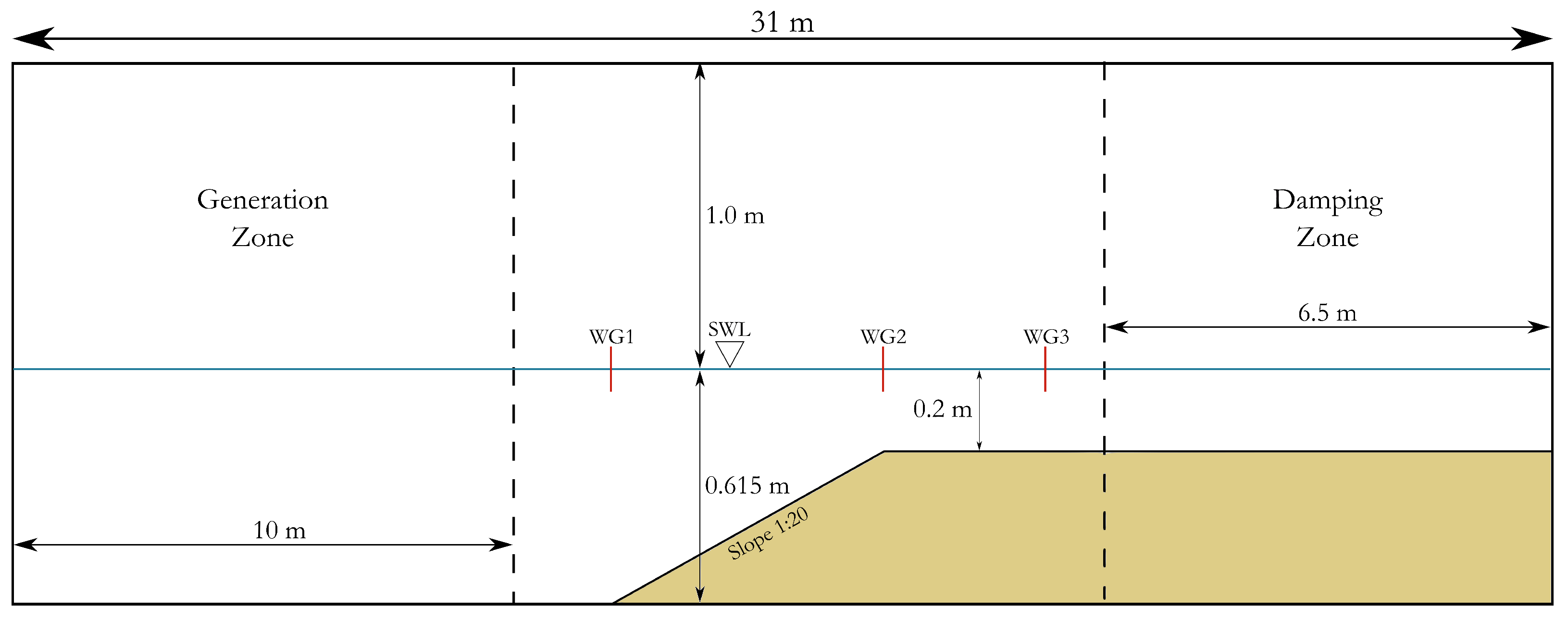
The numerical wave tank under consideration is presented in
Figure 10, and the wave spectrum is of JONSWAP-type with a peak period of
s and a significant wave height of
m. The locations of the wave gauges are identical to the experimental stations at
m,
m and
m.
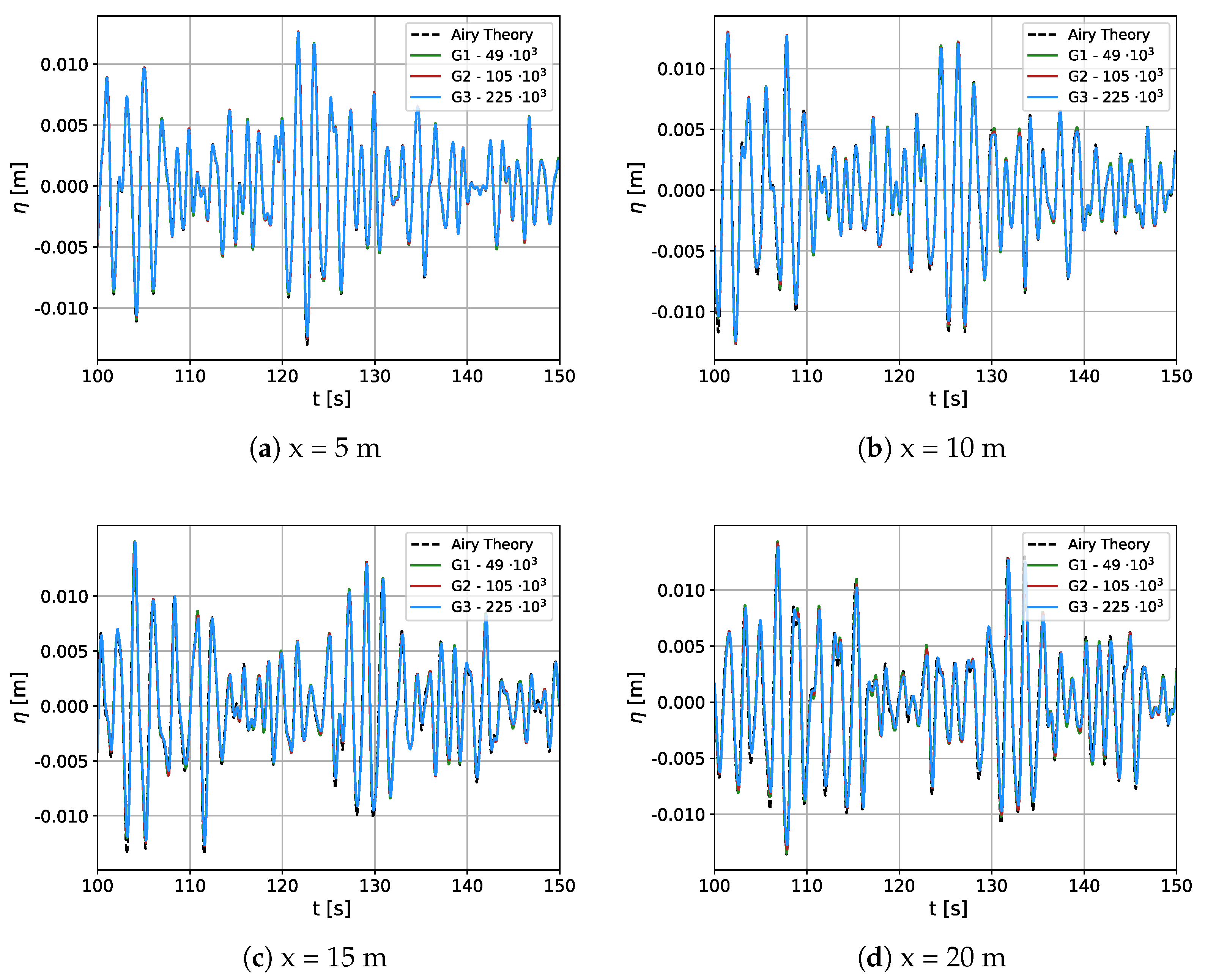
In this case, the breaking is much stronger than the previous since the ratio of the significant wave height to the depth at the most shallow point is
. Thus, the starting point of the analysis consists of a grid and timestep independence study. Three grid resolutions of ascending order of refinement were examined, the features of which are shown in
Table 2. The term
denotes the uniform cell size in the
x-direction in the area of the incident spectrum, where the depth is equal to
m, while
is the cell size in the flat region after the slope.
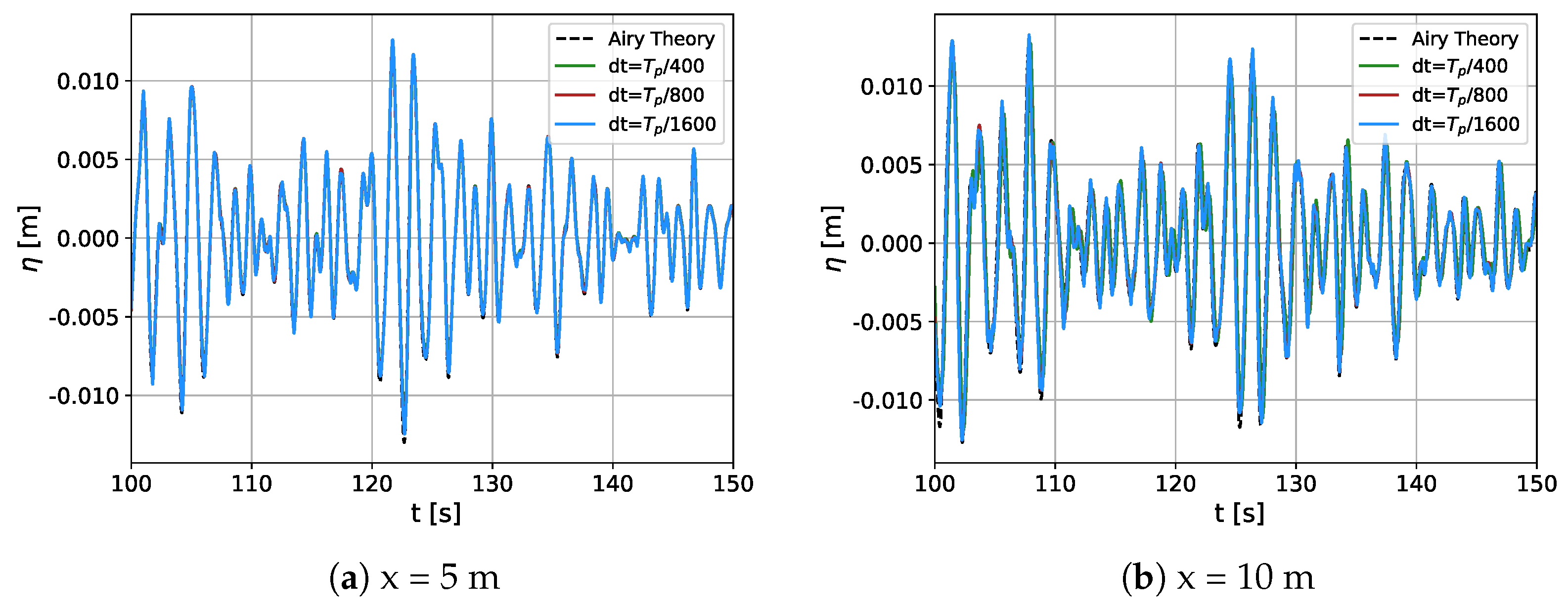
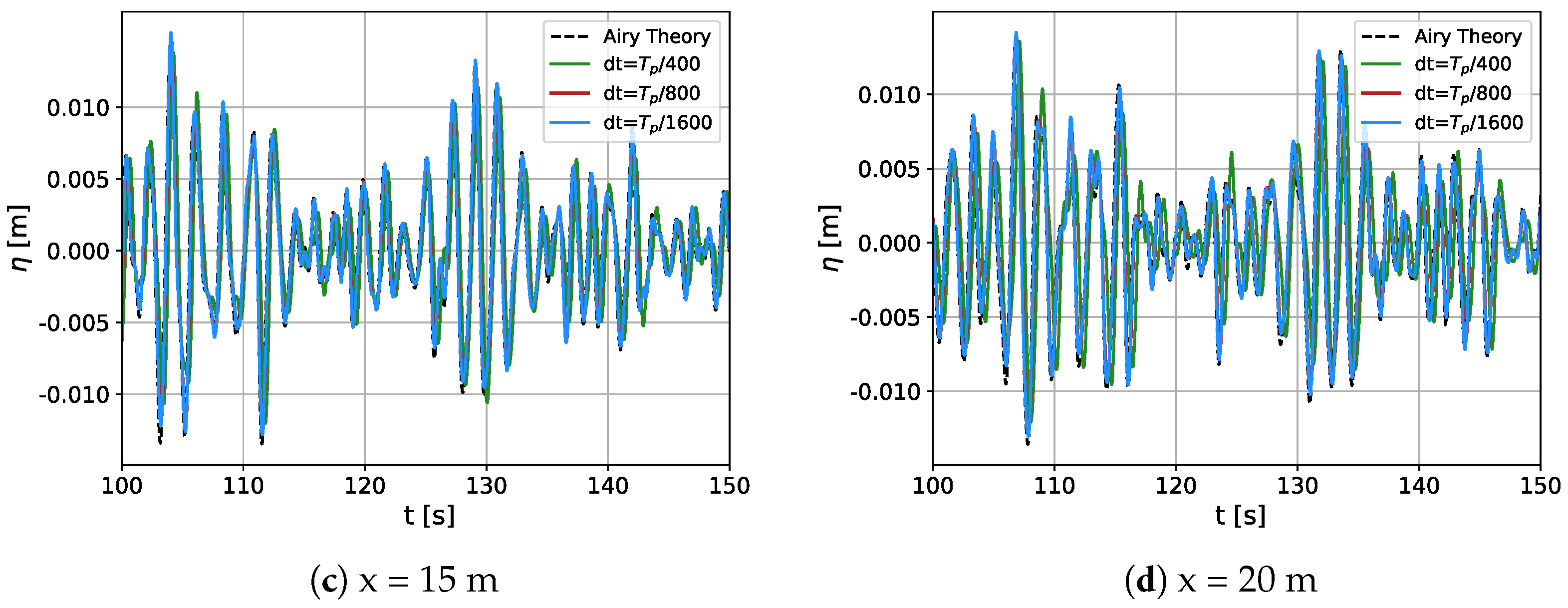
The grid resolution
, with a timestep of
, was found to be highly accurate and computationally affordable, so for this computational domain, the simulation was carried out for the timesteps
(see
Table 3). A significant increase in the accuracy level was observed in the case of
, in comparison with the respective increase for
. Thus, the analysis that follows was conducted using the grid resolution
and a timestep of
. Similar to the previous case, due to a more effective representation of the eddy viscosity and turbulent kinetic energy field, the Stabilized
SST model was chosen for the illustration of the final results. The number of generated wave components was set to
, with a frequency interval of
.
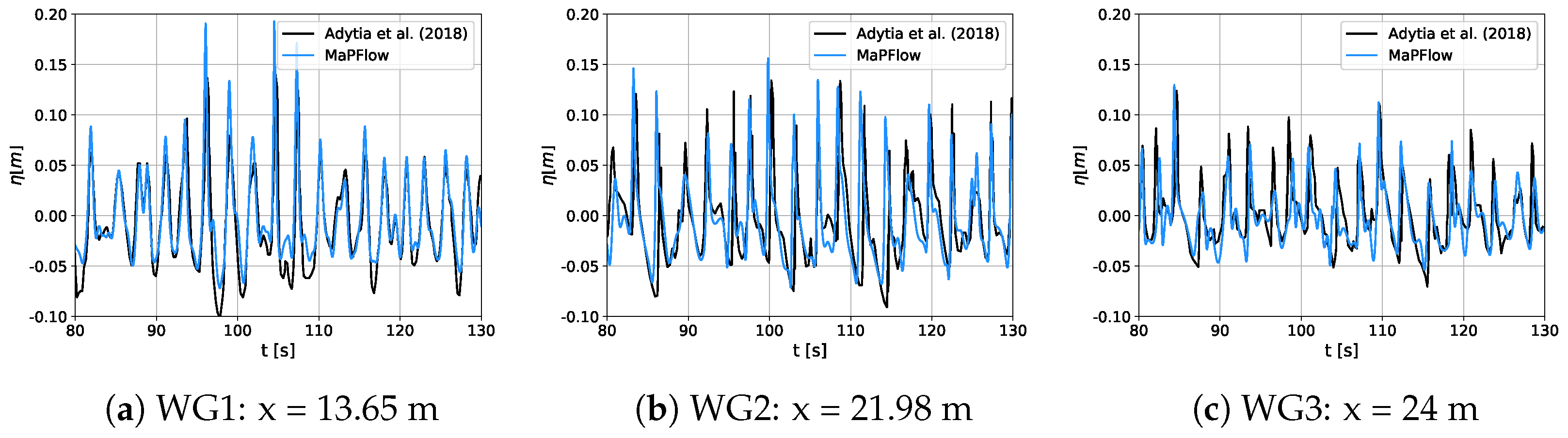
In
Figure 11, the reproduced free surface elevation history for the three stations is presented against the experimental results. The first subfigure corresponds to the location where the slope begins and depicts the time history used for the free surface reconstruction. The accuracy of the reconstruction is quite satisfactory; however, several discrepancies are observed in the troughs and crests. The reason for these discrepancies is that the linear Free Surface Reconstruction Algorithm was adopted, and it was mentioned as one of the method’s limitations in the study of Grilli et al. [
39]. In the second and third subfigures, the wave transformation and breaking are depicted, and the results are very promising. Considering the inherent error of the FSRA method, it is evident that the wave’s transformation due to shoaling and eventually breaking follows the general trend of the experimental results, despite this relative error. The fact that the elevations follow the periodic profile of the experimental irregular wave highlights the ability of
MaPFlow not only to capture the dispersive but also the shoaling phenomena of the problem.
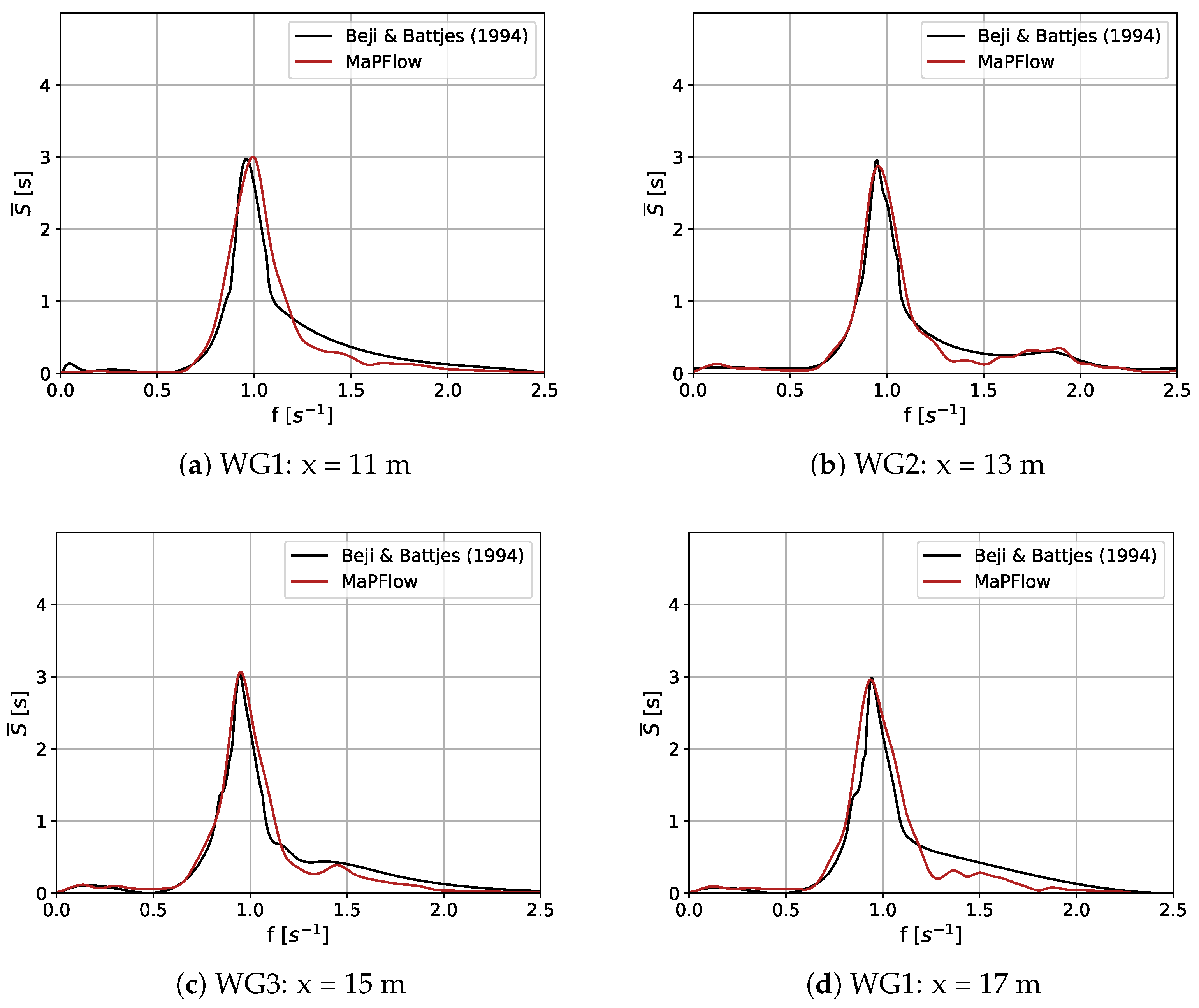
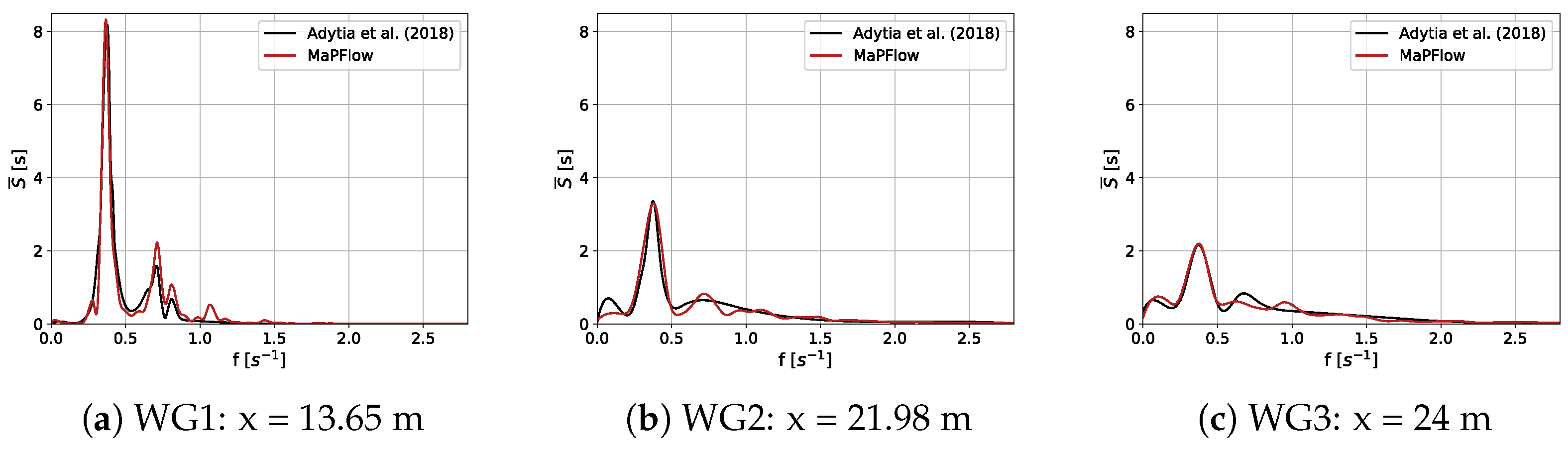
In
Figure 12, the spectral evolution of the reconstructed irregular wave along the three stations and in normalized form is presented. In the first gauge, where the incident spectrum is illustrated, apart from the primary peak at the respective frequency, a spread of energy in higher frequencies is observed. In the numerical spectrum, the formation of a secondary peak is also observed but on a smaller scale than the experimental results. This is probably caused by the effect of the seabed on the propagation of the irregular waves since the significant wave height is relatively large compared to the still water depth. In contrast with the previous case, where essentially non-breaking waves were considered, an appreciable portion of energy is lost here due to breaking. This fact can be graphically evaluated by the significant reduction in the area under the spectrum between the second and first gauges. In the last station, which is in the flat bottom area after the slope, further reduction in the wave energy is observed due to the strong interaction of the wave with the seabed topography.
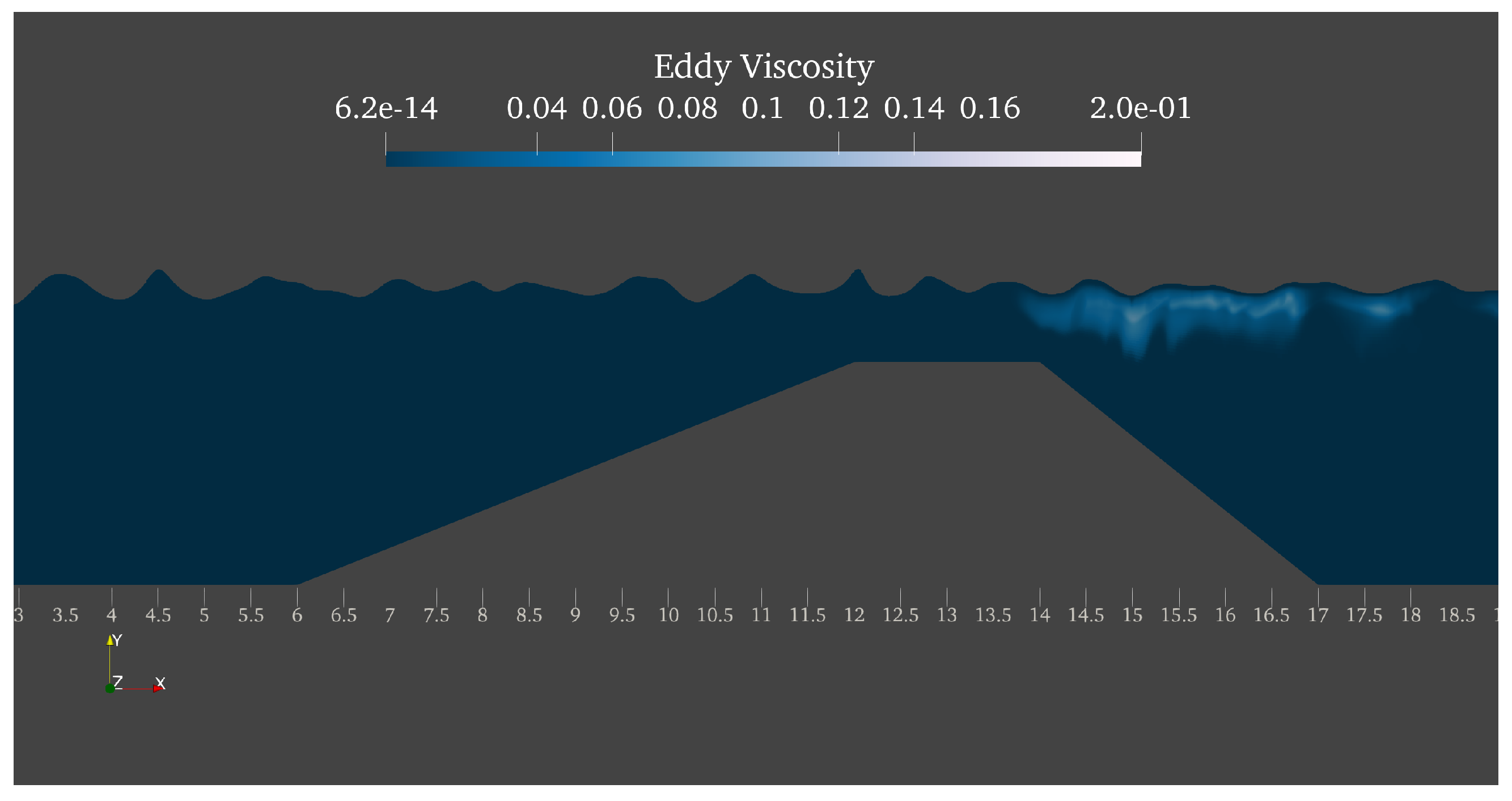
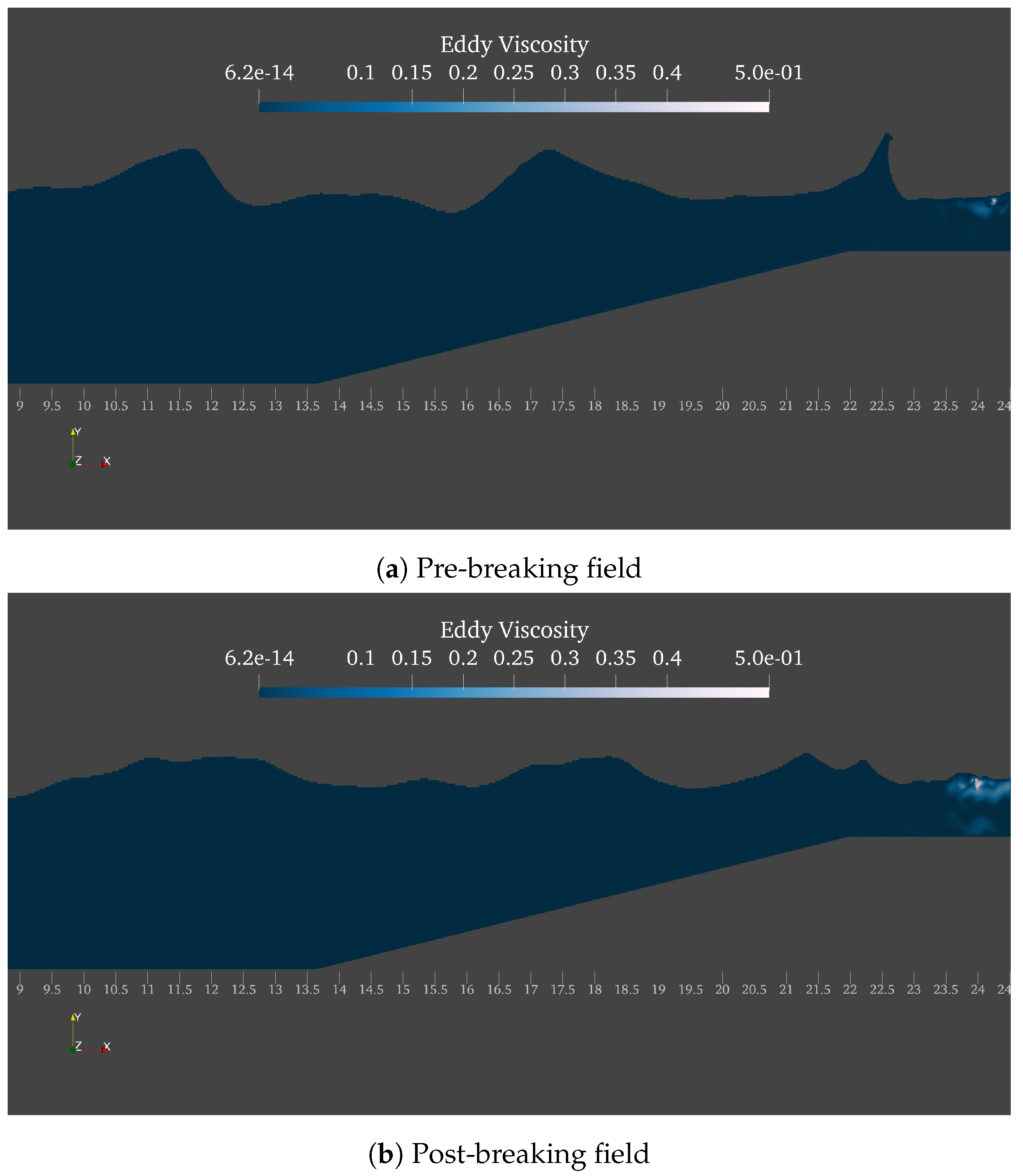
In
Figure 13, snapshots of the eddy viscosity in the region of the slope for a formed plunging wave before breaking, as well as for a post-breaking field, are presented. The effect of the stabilization technique is also evident here and can be extended to the case of irregular wave breaking. In particular, in the region where the wave propagates without deformations, no turbulence production is observed, whereas it is mostly generated after the end of the slope, where the breaking tends to occur, and the surf zone is formed. Furthermore, a qualitative aspect that indicates the applicability of this model to irregular wave breaking is the fact that prior to the breaking of the plunging peak (first subfigure), limited turbulence generation is present. On the contrary, after the breaking onset (second subfigure), the turbulence generation mechanisms are activated, and the presence of the eddy viscosity is more intense in the aforementioned region. A quantitative approach to this issue, including the comparison with experimental results, is necessary for further validation of this turbulence model in irregular domains, as well as for the proper calibration of the parameter
; thus, further research is recommended.
6. Conclusions
In conclusion, the present work constitutes a fully-featured approach to modelling irregular wave breaking and addresses several existing issues. First and foremost, an artificial compressibility approach for modelling free-surface flows has been tested regarding its ability to capture irregular wave transformations. The positive attributes that render this approach a good alternative for free-surface flow simulations is that it solves a single system of equations in a coupled manner. Therefore, the occurrence of disturbances, such as spurious air velocities, which are present in pressure-correction methods, is prevented.
Under that scope, an efficient and accurate framework for the generation of irregular waves in a numerical wave tank is adopted, which constructs the desired wave pattern from a given energy density spectrum. For the demonstration of the fidelity of the solver, as well as for the validation of the aforementioned method, the test case of the propagation of irregular waves over a breaker bar is considered. For both long and short waves, the numerical results seem to be in good agreement with the experimental results of Beji and Battjes. For further investigation of the problem, the case of irregular wave propagation over a piecewise linear seabed was considered, through which the ability of the solver to effectively capture the time history of the wave transformation was highlighted.
Furthermore, the problem of turbulence overproduction that is frequently observed in breaking wave simulations is addressed. Precisely, the Stabilized SST model is employed, which seems to provide rational results regarding the turbulent regime of wave breaking. Thus, through this work, an extension of the applicability of this particular turbulence model to the domain of irregular waves is made.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}