
Numerical Simulation of Self-Propelled Steady Jet Propulsion at Intermediate Reynolds Numbers: Effects of Orifice Size on Animal Jet Propulsion


Abstract
:1. Introduction
2. Numerical Simulation Method
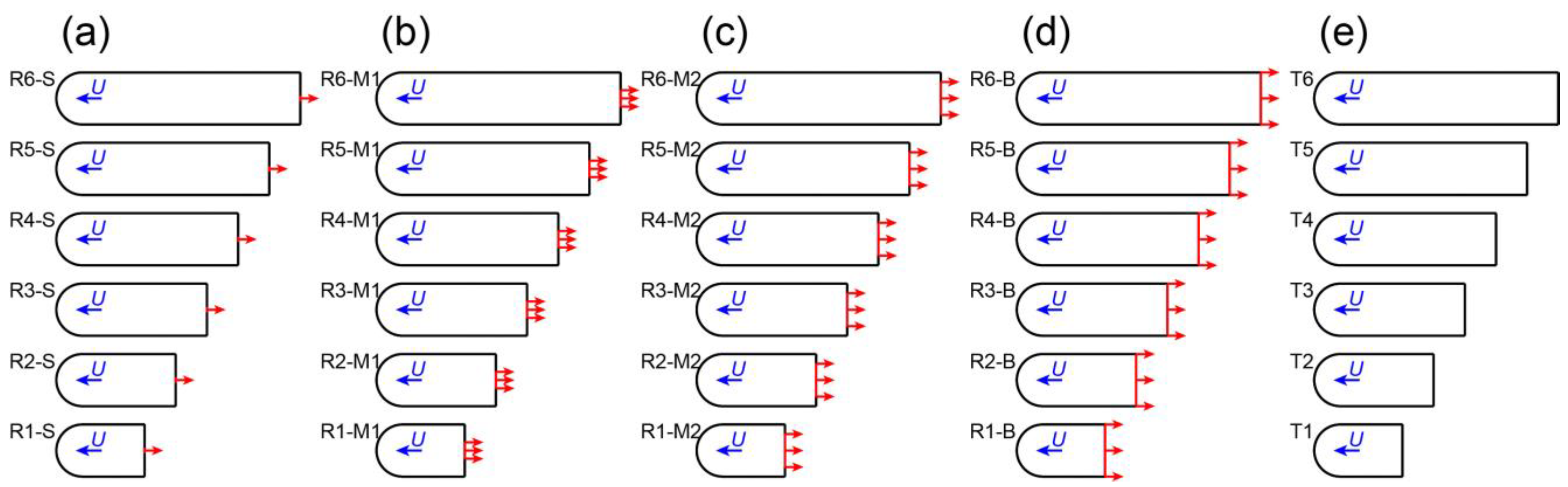
2.1. Body Geometry
2.2. Computational Domain and Boundary Conditions
2.3. Numerical Solver Specifications
2.4. Performance Metrics
2.5. Grid Refinement Study
3. Results
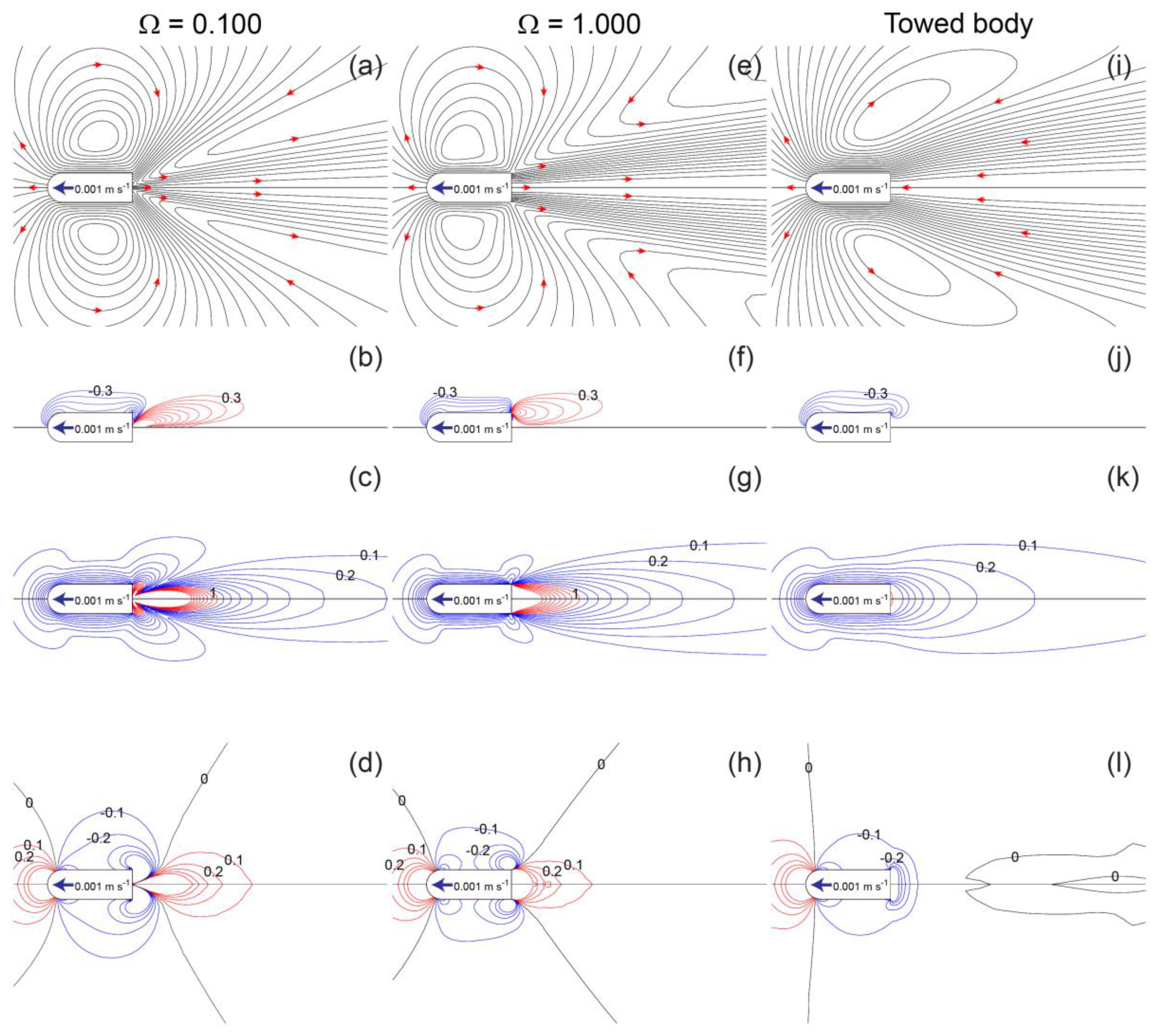
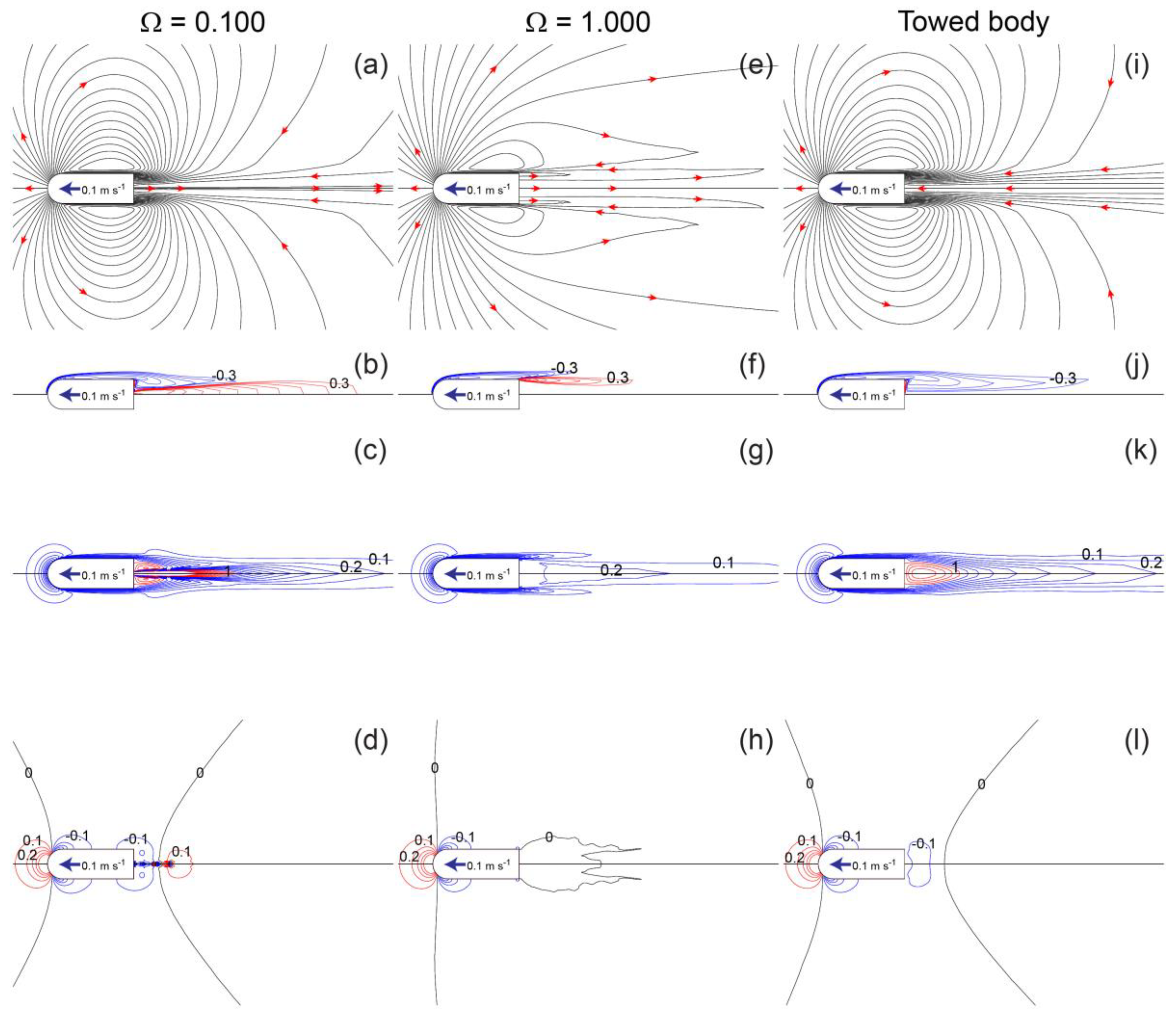
3.1. Simulated Flow Fields
3.2. Drag Coefficients
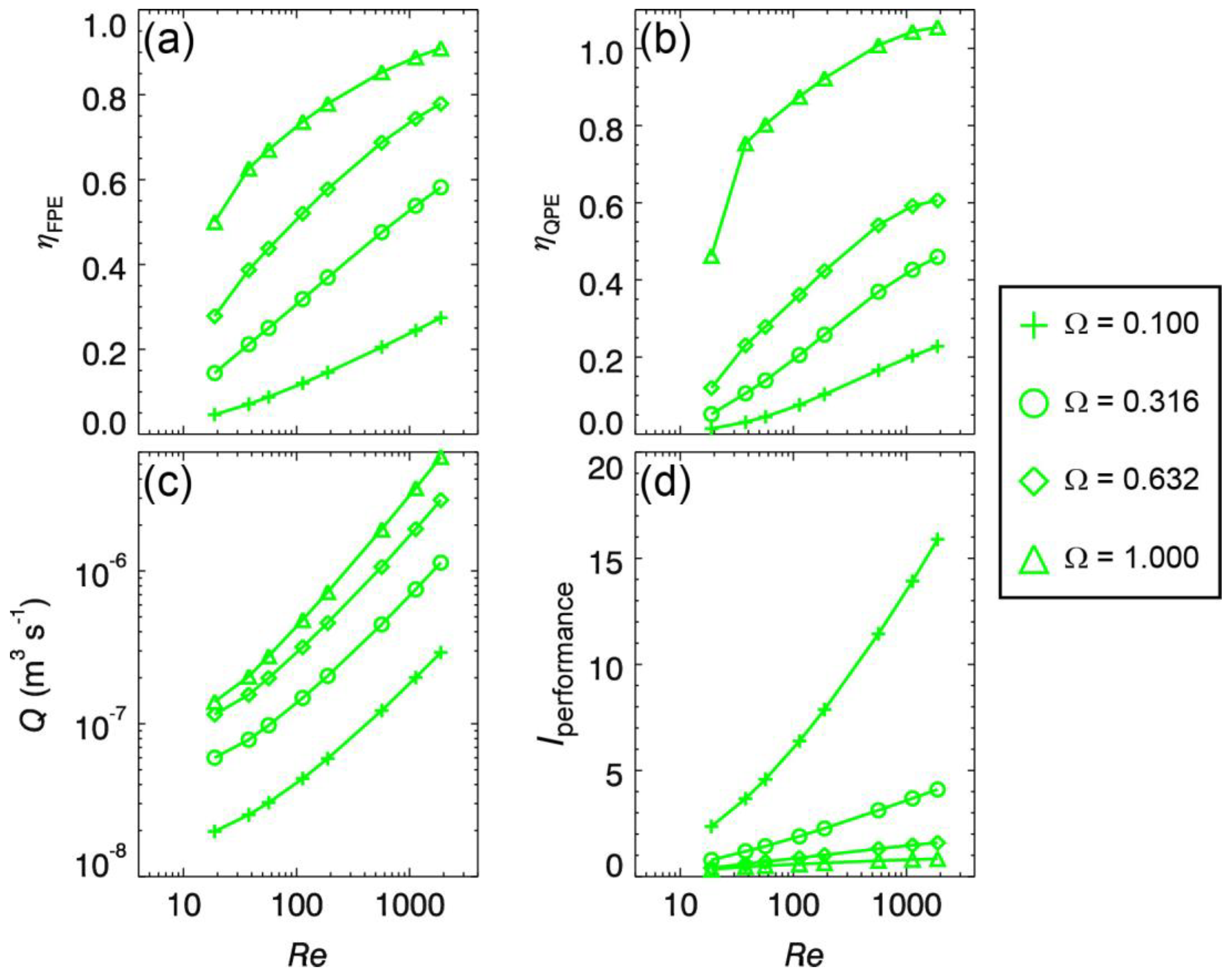
3.3. Swimming Efficiencies, Jet Volume Flow Rate, and Jet-Propulsion Performance Index
4. Discussion
Supplementary Materials
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vogel, S. Life in Moving Fluids: The Physical Biology of Flow, 2nd ed.; Princeton University Press: Princeton, NJ, USA, 1994. [Google Scholar]
- Alexander, R.M. Principles of Animal Locomotion; Princeton University Press: Princeton, NJ, USA, 2003. [Google Scholar]
- Johnson, W.; Soden, P.D.; Trueman, E.R. A study in jet propulsion: An analysis of the motion of the squid, Loligo vulgaris. J. Exp. Biol. 1972, 56, 155–165. [Google Scholar] [CrossRef]
- O’Dor, R.K. The forces acting on swimming squid. J. Exp. Biol. 1988, 137, 421–442. [Google Scholar] [CrossRef]
- O’Dor, R.K.; Webber, D.M. Invertebrate athletes: Trade-offs between transport efficiency and power density in cephalopod evolution. J. Exp. Biol. 1991, 160, 93–112. [Google Scholar] [CrossRef]
- Anderson, E.J.; DeMont, M.E. The mechanics of locomotion in the squid Loligo pealei: Locomotory function and unsteady hydrodynamics of the jet and intramantle pressure. J. Exp. Biol. 2000, 203, 2851–2863. [Google Scholar] [CrossRef] [PubMed]
- Anderson, E.J.; Grosenbaugh, M.A. Jet flow in steadily swimming adult squid. J. Exp. Biol. 2005, 208, 1125–1146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bartol, I.K.; Krueger, P.S.; Stewart, W.J.; Thompson, J.T. Hydrodynamics of pulsed jetting in juvenile and adult brief squid Lolliguncula brevis: Evidence of multiple jet ‘modes’ and their implications for propulsive efficiency. J. Exp. Biol. 2009, 212, 1889–1903. [Google Scholar] [CrossRef] [Green Version]
- Packard, A.; Bone, Q.; Hignette, M. Breathing and swimming movements in a captive Nautilus. J. Mar. Biol. Ass. UK 1980, 60, 313–327. [Google Scholar] [CrossRef]
- O’Dor, R.K.; Wells, J.; Wells, M.J. Speed, jet pressure and oxygen consumption relationships in free-swimming Nautilus. J. Exp. Biol. 1990, 154, 383–396. [Google Scholar] [CrossRef]
- Neil, T.R.; Askew, G.N. Swimming mechanics and propulsive efficiency in the chambered Nautilus. R. Soc. Open Sci. 2018, 5, 170467. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Daniel, T.L. Mechanics and energetics of medusan jet propulsion. Can. J. Zool. 1983, 61, 1406–1420. [Google Scholar] [CrossRef]
- Colin, S.P.; Costello, J.H. Morphology, swimming performance and propulsive mode of six co-occurring hydromedusae. J. Exp. Biol. 2002, 205, 427–437. [Google Scholar] [CrossRef] [PubMed]
- Dabiri, J.O.; Colin, S.P.; Costello, J.H.; Gharib, M. Flow patterns generated by oblate medusan jellyfish: Field measurements and laboratory analyses. J. Exp. Biol. 2005, 208, 1257–1265. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Katija, K.; Jiang, H. Swimming by medusae Sarsia tubulosa in the viscous vortex ring limit. Limnol. Oceanogr. Fluids Environ. 2013, 3, 103–118. [Google Scholar] [CrossRef] [Green Version]
- Katija, K.; Colin, S.P.; Costello, J.H.; Jiang, H. Ontogenetic propulsive transitions by Sarsia tubulosa medusae. J. Exp. Biol. 2015, 218, 2333–2343. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bone, Q.; Trueman, E.R. Jet propulsion in salps (Tunicata: Thaliacea). J. Zool. Lond. 1983, 201, 481–506. [Google Scholar] [CrossRef]
- Madin, L.P. Aspects of jet propulsion in salps. Can. J. Zool. 1990, 68, 765–777. [Google Scholar] [CrossRef]
- Sutherland, K.R.; Madin, L.P. Comparative jet wake structure and swimming performance of salps. J. Exp. Biol. 2010, 213, 2967–2975. [Google Scholar] [CrossRef] [Green Version]
- Webber, D.M.; O’Dor, R.K. Monitoring the metabolic rate and activity of free-swimming squid with telemetered jet pressure. J. Exp. Biol. 1986, 126, 205–224. [Google Scholar] [CrossRef]
- Jiang, H. An elastic collision model for impulsive jumping by small planktonic organisms. Fluids 2020, 5, 154. [Google Scholar] [CrossRef]
- Dabiri, J.O.; Colin, S.P.; Katija, K.; Costello, J.H. A wake-based correlate of swimming performance and foraging behavior in seven co-occurring jellyfish species. J. Exp. Biol. 2010, 213, 1217–1225. [Google Scholar] [CrossRef] [Green Version]
- Chamberlain, J.A.J. Jet propulsion of Nautilus: A surviving example of early Paleozoic cephalopod locomotor design. Can. J. Zool. 1990, 68, 806–814. [Google Scholar] [CrossRef]
- Bartol, I.K.; Patterson, M.R.; Mann, R. Swimming mechanics and behavior of the shallow-water brief squid Lolliguncula brevis. J. Exp. Biol. 2001, 208, 1125–1146. [Google Scholar] [CrossRef]
- Lighthill, M.J. Hydromechanics of aquatic animal propulsion. Annu. Rev. Fluid Mech. 1969, 1, 413–446. [Google Scholar] [CrossRef]
- Jiang, H.; Grosenbaugh, M.A. Numerical simulation of vortex ring formation in the presence of background flow with implications for squid propulsion. Theor. Comput. Fluid Dyn. 2006, 20, 103–123. [Google Scholar] [CrossRef]
- Bi, X.; Zhu, Q. Fluid-structure investigation of a squid-inspired swimmer. Phys. Fluids 2019, 31, 101901. [Google Scholar] [CrossRef]
- Sahin, M.; Mohseni, K.; Colin, S.P. The numerical comparison of flow patterns and propulsive performances for the hydromedusae Sarsia tubulosa and Aequorea victoria. J. Exp. Biol. 2009, 212, 2656–2667. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Herschlag, G.; Miller, L.A. Reynolds number limits for jet propulsion: A numerical study of simplified jellyfish. J. Theor. Biol. 2011, 285, 84–95. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hoover, A.P.; Griffith, B.E.; Miller, L.A. Quantifying performance in the medusan mechanospace with an actively swimming three-dimensional jellyfish model. J. Fluid Mech. 2017, 813, 1112–1155. [Google Scholar] [CrossRef]
- Bi, X.; Zhu, Q. Dynamics of a squid-inspired swimmer in free swimming. Bioinspir. Biomim. 2020, 15, 016005. [Google Scholar] [CrossRef]
- Jiang, H.; Costello, J.H.; Colin, S.P. Fluid dynamics and efficiency of colonial swimming via multijet propulsion at intermediate Reynolds numbers. Phys. Rev. Fluids 2021, 6, 013103. [Google Scholar] [CrossRef]
- Maertens, A.P.; Triantafyllou, M.S.; Yue, D.K.P. Efficiency of fish propulsion. Bioinspir. Biomim. 2015, 10, 046013. [Google Scholar] [CrossRef] [PubMed] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation |
|---|---|
| dorifice | Jet orifice diameter |
| d | Body cross-sectional width |
| L | Body length |
| Ω | Orifice ratio (≡ dorifice/d) |
| e | Body aspect ratio (≡ d/L) |
| α | Funnel ratio [≡ (maximum cross-sectional area of funnel)/(total volume)2/3] |
| U | Swimming speed |
| Uj | Jet velocity relative to the jet orifice |
| ν | Fluid kinematic viscosity |
| ρ | Fluid density |
| Re | Reynolds number (≡ U L/ν) |
| x | Axial coordinate |
| r | Radial coordinate |
| Dviscous | Viscous drag |
| Dpressure | Pressure drag |
| D | Body drag (≡ Dviscous + Dpressure) |
| Dtow | Drag acting on the towed non-jetting body |
| T | Total jet thrust |
| Acs | Body cross-sectional area (≡ π d2/4) |
| Ajet | Jet area (≡ π dorifice2/4) |
| CD-viscous | Viscous drag coefficient |
| CD-pressure | Pressure drag coefficient |
| CD | Drag coefficient (≡ CD-viscous + CD-pressure) |
| Pjet | Jet power |
| Puseful | Useful power (≡ D U) |
| Ptow | Tow power (≡ Dtow U) |
| ηFPE | Froude propulsion efficiency (≡ Puseful/Pjet) |
| ηQPE | Quasi-propulsive efficiency (≡ Ptow/Pjet) |
| Q | Jet volume flow rate |
| Iperformance | Jet-propulsion performance index (≡ Acs U/Q) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, H. Numerical Simulation of Self-Propelled Steady Jet Propulsion at Intermediate Reynolds Numbers: Effects of Orifice Size on Animal Jet Propulsion. Fluids 2021, 6, 230. https://doi.org/10.3390/fluids6060230
Jiang H. Numerical Simulation of Self-Propelled Steady Jet Propulsion at Intermediate Reynolds Numbers: Effects of Orifice Size on Animal Jet Propulsion. Fluids. 2021; 6(6):230. https://doi.org/10.3390/fluids6060230
Chicago/Turabian StyleJiang, Houshuo. 2021. "Numerical Simulation of Self-Propelled Steady Jet Propulsion at Intermediate Reynolds Numbers: Effects of Orifice Size on Animal Jet Propulsion" Fluids 6, no. 6: 230. https://doi.org/10.3390/fluids6060230
APA StyleJiang, H. (2021). Numerical Simulation of Self-Propelled Steady Jet Propulsion at Intermediate Reynolds Numbers: Effects of Orifice Size on Animal Jet Propulsion. Fluids, 6(6), 230. https://doi.org/10.3390/fluids6060230