
CFD Investigation of Trout-Like Configuration Holding Station near an Obstruction



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
Objective and Motivation
2. Materials and Methods
2.1. CFD Tool
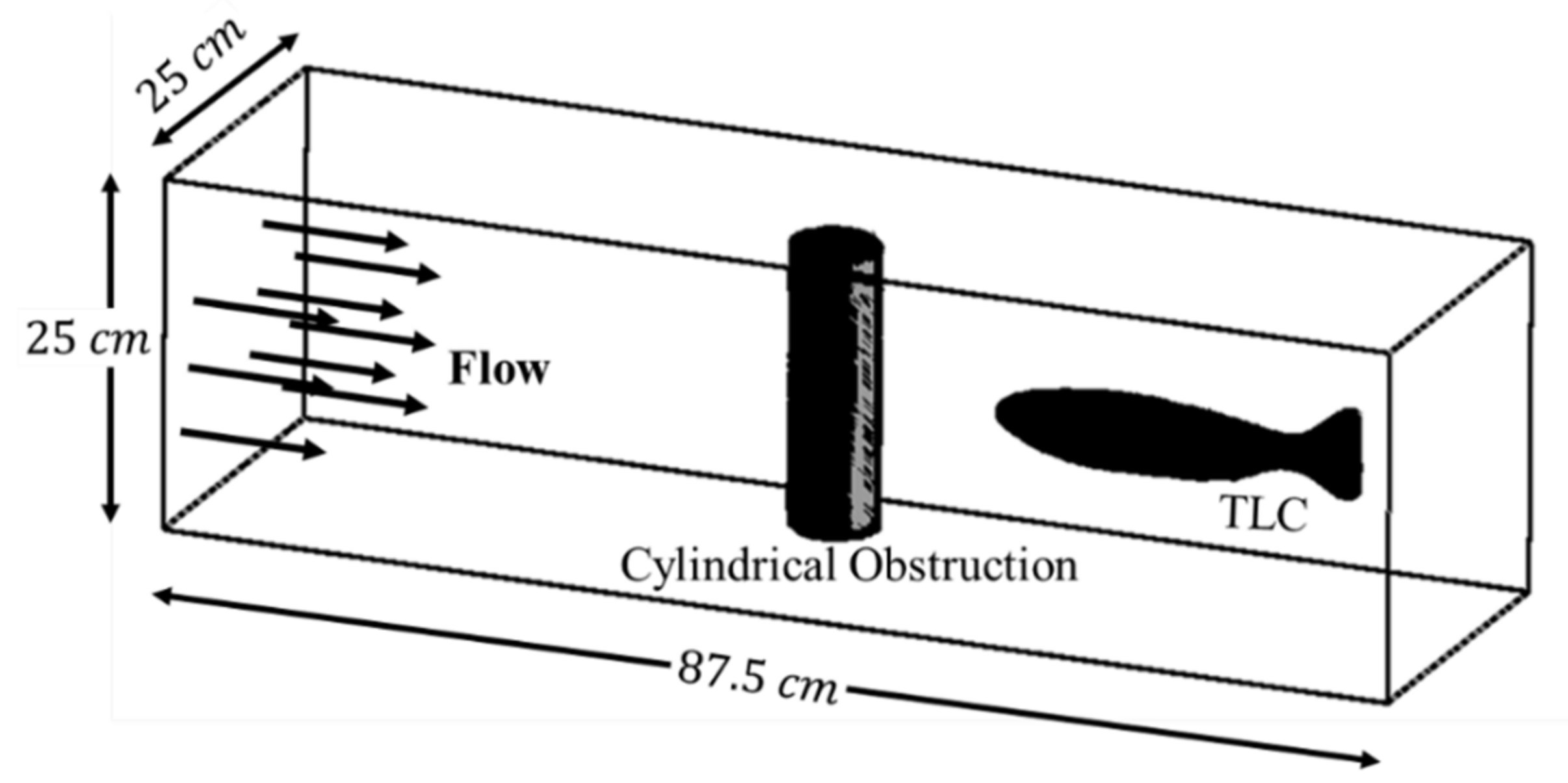
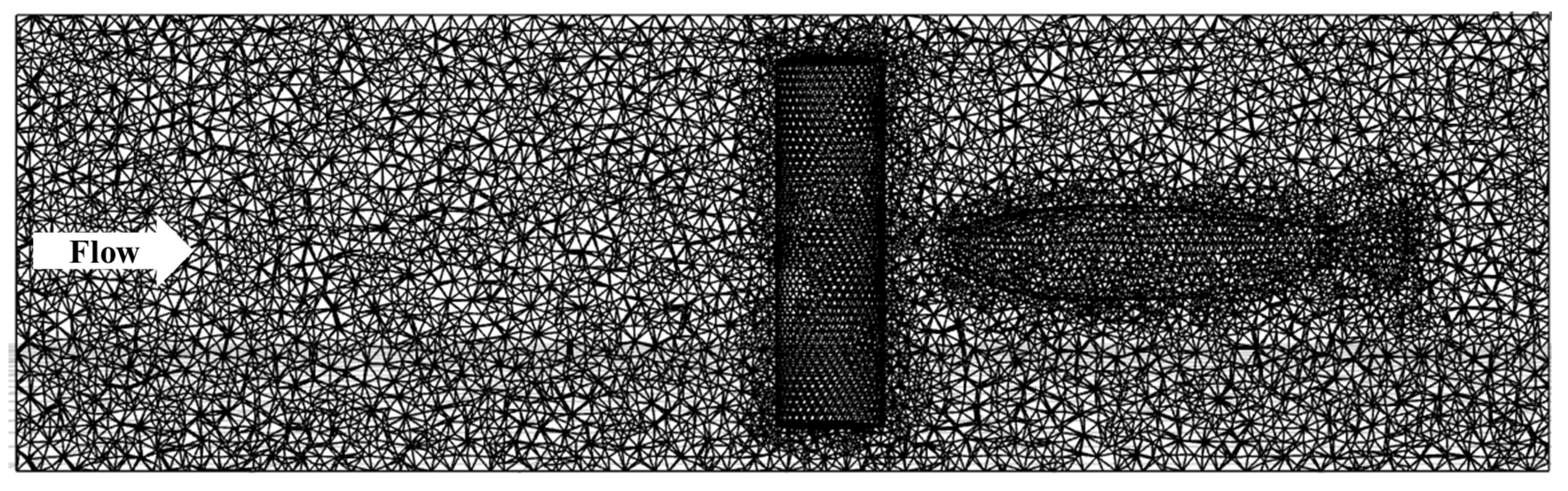
2.2. Model Description
2.3. Oscillatory Motion of the TLC
3. Results and Discussion
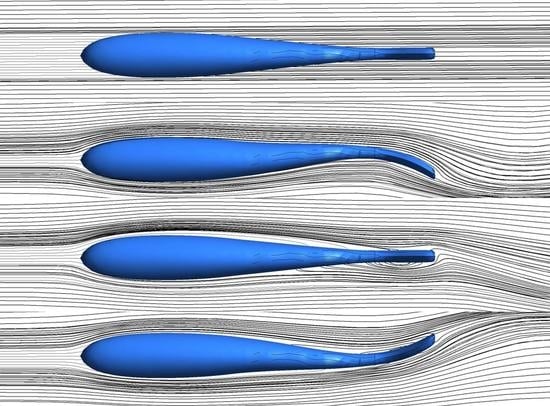
3.1. TLC Alone (No Obstruction)
3.2. TLC Positioned Lateral to the Obstruction
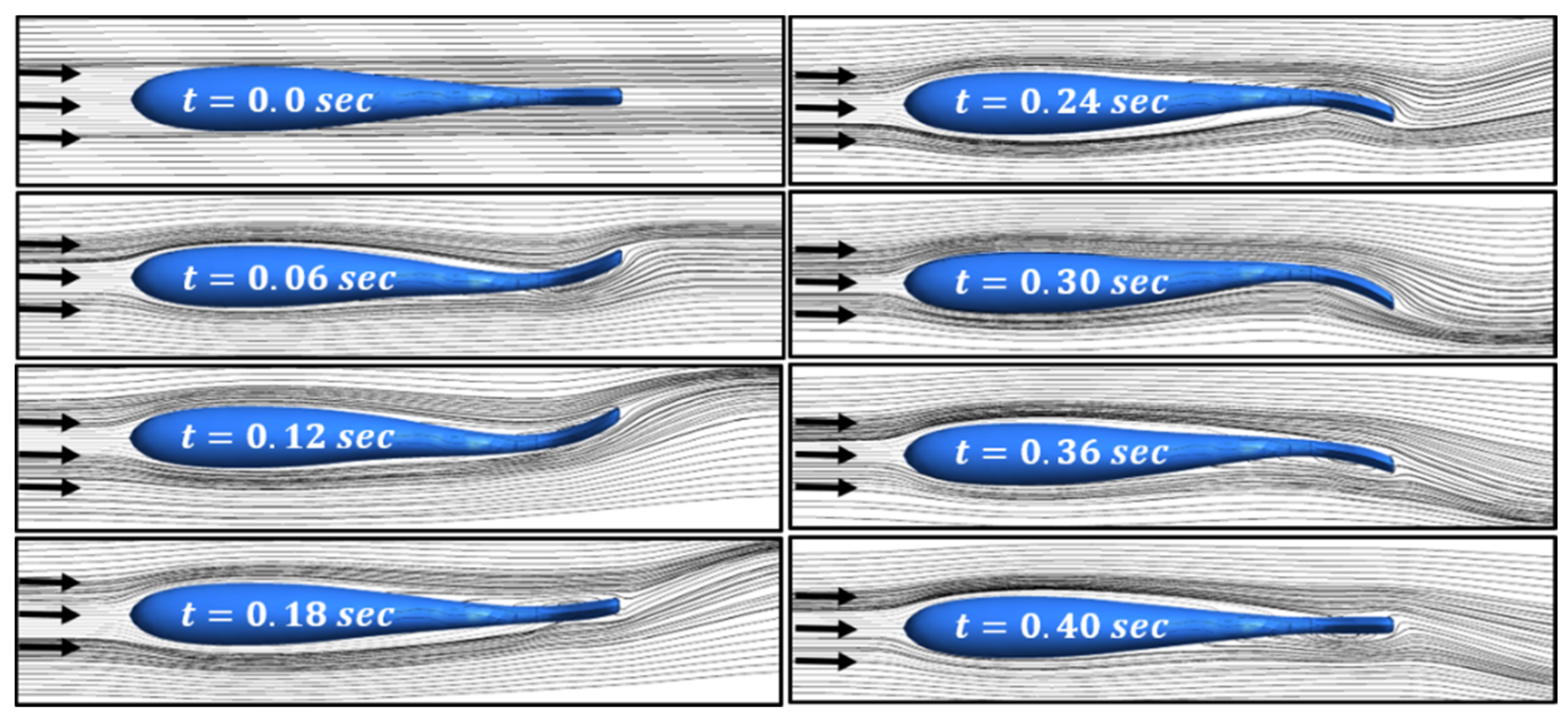
3.3. TLC Positioned Downstream of the Obstruction
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- 1:
- /*********************************************
- 2:
- node motion based on simple fish undulation equation
- 3:
- compiled UDF
- 4:
- *********************************************************/
- 5:
- #include “udf.h”
- 6:
- DEFINE_GRID_MOTION(trout, domain, dt, time, dtime)
- 7:
- {
- 8:
- Thread *tf = DT_THREAD(dt);
- 9:
- face_t f;
- 10:
- Node *v;
- 11:
- real NV_VEC(omega), NV_VEC(axis), NV_VEC(dx);
- 12:
- real NV_VEC(origin), NV_VEC(rvec);
- 13:
- real sign;
- 14:
- real ap1;
- 15:
- real ap2;
- 16:
- real ap3;
- 17:
- real xgeom;
- 18:
- real segment;
- 19:
- real xr;
- 20:
- real yn;
- 21:
- real a;
- 22:
- real b;
- 23:
- real c;
- 24:
- real d;
- 25:
- int n;
- 26:
- /* set cubic spline paramters*/
- 27:
- a = 0;
- 28:
- b = 1;
- 29:
- c = -174.98;
- 30:
- d = 1304.43;
- 31:
- /* set deforming flag on adjacent cell zone */
- 32:
- SET_DEFORMING_THREAD_FLAG(THREAD_T0(tf));
- 33:
- segment = 0.4;
- 34:
- xgeom = 0.26;
- 35:
- xr = xgeom*segment;
- 36:
- Message(“segement = %f, xgeom = %f\n”, segment, xgeom);
- 37:
- Message(“xr = %f, d = %f\n”, xr, d);
- 38:
- sign = cos(15.7 * time);
- 39:
- Message(“time = %f, omega = %f\n”, time, sign);
- 40:
- NV_S(omega, =, 0.0);
- 41:
- NV_D(axis, =, 0.0, 1.0, 0.0);
- 42:
- NV_D(origin, =, 0.0, 0.0, 0.0);
- 43:
- begin_f_loop(f, tf)
- 44:
- {
- 45:
- f_node_loop(f, tf, n)
- 46:
- {
- 47:
- v = F_NODE(f, tf, n);
- 48:
- /* update node if x position is greater than 0.02
- 49:
- and that the current node has not been previously
- 50:
- visited when looping through previous faces */
- 51:
- if (NODE_X(v) > xr && NODE_POS_NEED_UPDATE(v))
- 52:
- {
- 53:
- /* indicate that node position has been update
- 54:
- so that it’s not updated more than once */
- 55:
- NODE_POS_UPDATED(v);
- 56:
- ap1 = NODE_X(v) − xr;
- 57:
- ap2 = a + (b * ap1) + (c *ap1 *ap1) + (d *ap1*ap1*ap1);
- 58:
- /* dx[1] = sign * ap2;
- 59:
- /* dx[0] = 0.0;
- 60:
- /* dx[2] = 0.0;
- 61:
- /* NODE_COORD(v)[1] = yn; */
- 62:
- omega[1] = sign * pow(ap2 / 1.0, 1.0);
- 63:
- NV_VV(rvec, =, NODE_COORD(v), -, origin);
- 64:
- NV_CROSS(dx, omega, rvec);
- 65:
- NV_S(dx, *=, dtime);
- 66:
- dx[0] = 0.0;
- 67:
- NV_V(NODE_COORD(v), +=, dx);
- 68:
- }
- 69:
- }
- 70:
- }
- 71:
- end_f_loop(f, tf);
- 72:
- }
References
- Liu, H.; Javed, O.; Taylor, G.; Cao, X.; Haering, N. Omni-directional surveillance for unmanned water vehicles. In Proceedings of the Eighth International Workshop on Visual Surveillance—VS2008, Marseille, France, 17 October 2008. [Google Scholar]
- Eustice, R.; Singh, H.; Leonard, J.; Walter, M.; Ballard, R. Visually Navigating the RMS Titanic with SLAM Information Filters. In Robotics: Science and Systems I; MIT Press: Cambridge, MA, USA, 2005; pp. 57–64. [Google Scholar]
- Freitag, L.; Grund, M.; Singh, S.; Partan, J.; Koski, P.; Ball, K. The WHOI micro-modem: An acoustic communications and navigation system for multiple platforms. In Proceedings of the OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–25 September 2005; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2006. [Google Scholar]
- Kondo, H.; Ura, T. Navigation of an AUV for investigation of underwater structures. Control Eng. Pr. 2004, 12, 1551–1559. [Google Scholar] [CrossRef]
- Budiyono, A. Advances in unmanned underwater vehicles technologies: Modeling, control and guidance perspectives. Ind. J. Mar. Sci. 2009, 38, 282–295. [Google Scholar]
- Tangorra, J.L.; Davidson, S.N.; Hunter, I.W.; Madden, P.G.; Lauder, G.V.; Dong, H.; Bozkurttas, M.; Mittal, R. The development of a biologically inspired propulsor for unmanned underwater vehicles. IEEE J. Ocean. Eng. 2007, 32, 533–550. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Wang, L.; Yu, J.; Tan, M. Coordinated Transport by Multiple Biomimetic Robotic Fish in Underwater Environment. IEEE Trans. Control. Syst. Technol. 2007, 15, 658–671. [Google Scholar] [CrossRef]
- Chen, Z.; Shatara, S.; Tan, X. Modeling of biomimetic robotic fish propelled by an ionic polymer–metal composite caudal fin. IEEE ASME Trans. Mechatron. 2010, 15, 448–459. [Google Scholar] [CrossRef]
- Liu, F.; Yang, C.-J.; Lee, K.-M. Hydrodynamic modeling of an undulating fin for robotic fish design. In Proceedings of the 2010 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Montreal, QC, Canada, 6–9 July 2010; pp. 55–60. [Google Scholar]
- Hirata, K. Development of experimental fish robot. In Proceedings of the Sixth International Symposium on Marine Engineering (ISME 2000), Tokyo, Japan, 23–27 October 2000. [Google Scholar]
- Liu, J.; Hu, H. Biological inspiration: From carangiform fish to multi-joint robotic fish. J. Bionic Eng. 2010, 7, 35–48. [Google Scholar] [CrossRef]
- Marchese, A.D.; Onal, C.D.; Rus, D.L. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft. Robot. 2014, 1, 75–87. [Google Scholar] [CrossRef] [Green Version]
- Ebrahimi, M.; Abbaspour, M. A Comparative numerical study on the performances and vortical patterns of two bioinspired oscillatory mechanisms: Undulating and pure heaving. Appl. Bionics Biomech. 2015, 2015, 1–25. [Google Scholar] [CrossRef] [Green Version]
- Park, Y.-J.; Jeong, U.; Lee, J.; Kwon, S.-R.; Kim, H.-Y.; Cho, K.-J. Kinematic condition for maximizing the thrust of a robotic fish using a compliant caudal fin. IEEE Trans. Robot. 2012, 28, 1216–1227. [Google Scholar] [CrossRef]
- Chowdhury, A.R.; Xue, W.; Behera, M.R.; Panda, S.K. Hydrodynamics study of a BCF mode bioinspired robotic-fish underwater vehicle using Lighthill’s slender body model. J. Mar. Sci. Technol. 2015, 21, 102–114. [Google Scholar] [CrossRef]
- Liu, H.; Gong, F.; Curet, O. Unleashing the potential of undulating fin propulsion using a biomimetic robotic vessel. Mar. Technol. Soc. J. 2017, 51, 79–93. [Google Scholar] [CrossRef]
- Kim, H.S.; Lee, J.Y.; Chu, W.S.; Ahn, S.H. Design and fabrication of soft morphing ray propulsor: Undulator and oscillator. Soft Robot. 2017, 4, 49–60. [Google Scholar] [CrossRef]
- Verma, S.; Novati, G.; Koumoutsakos, P. Efficient collective swimming by harnessing vortices through deep reinforcement learning. Proc. Natl. Acad. Sci. USA 2018, 115, 5849–5854. [Google Scholar] [CrossRef] [Green Version]
- Liao, J.C. A review of fish swimming mechanics and behaviour in altered flows. Philos. Trans. R. Soc. B: Biol. Sci. 2007, 362, 1973–1993. [Google Scholar] [CrossRef] [Green Version]
- Cook, C.L.; Coughlin, D.J. Rainbow trout Oncorhynchus mykiss consume less energy when swimming near obstructions. J. Fish Biol. 2010, 77, 1716–1723. [Google Scholar] [CrossRef] [PubMed]
- Taguchi, M.; Liao, J.C. Rainbow trout consume less oxygen in turbulence: The energetics of swimming behaviors at different speeds. J. Exp. Biol. 2011, 1428–1436. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bale, R.; Hao, M.; Bhalla, A.; Patankar, N. Energy efficiency and allometry of movement of swimming and flying animals. Proc. Natl. Acad. Sci. USA 2014, 111, 7517–7521. [Google Scholar] [CrossRef] [Green Version]
- Liao, J.C.; Beal, D.D.; Lauder, G.V.; Triantafyllou, M.S. Fish exploiting vortices decrease muscle activity. Science 2003, 302, 1566–1569. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.; Ming, A.; Shimojo, M.; Inoue, M.; Maekawa, H. Fluid-structure interaction analysis of a soft robotic fish using piezoelectric fiber composite. J. Robot. Mechatron. 2014, 26, 638–648. [Google Scholar] [CrossRef]
- Park, H.C.; Lee, J.E.; Choi, H.S.; Kyung, J.; Yun, D.; Jeong, S.; Ryu, Y. Application of FSI (Fluid Structure Interaction) to biomimetic robot fish. In Proceedings of the 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Jeju, Korea, 30 October–2 November 2013. [Google Scholar]
- Akhtar, I.; Mittal, R.; Lauder, G.; Drucker, E. Hydrodynamics of a biologically inspired tandem flapping foil configuration. Theor. Comput. Fluid Dyn. 2007, 21, 155–170. [Google Scholar] [CrossRef]
- Haq, M.; Gang, Z.; Aftab, S. Force analysis of IPMC actuated fin and wing assembly of a micro scanning device through two-way fluid structure interaction approach. Int. J. Eng. Res. Afr. 2016, 21, 19–32. [Google Scholar] [CrossRef]
- Li, R.; Xiao, Q.; Liu, Y.; Hu, J.; Li, L.; Li, G.; Wen, L. A multi-body dynamics based numerical modelling tool for solving aquatic biomimetic problems. Bioinspir. Biomim. 2018, 13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guan, Z.; Gu, N.; Gao, W.; Nahavandi, S. 3D hydrodynamic analysis of a biomimetic robot fish. In Proceedings of the 11th International Conference on Control Automation Robotics & Vision, Singapore, 7–10 December 2010. [Google Scholar]
- Li, N.; Liu, H.; Su, Y. Numerical study on the hydrodynamics of thunniform bio-inspired swimming under self-propulsion. PLoS ONE 2017, 12. [Google Scholar] [CrossRef] [PubMed]
- Xue, G.; Liu, Y.; Chen, A.; Li, S. Motion model of fish-like underwater vehicle and its effect on hydrodynamic performance. In Proceedings of the 11th International Symposium on Mechatronics and Its Applications (ISMA), Sharjah, United Arab Emirates, 4–6 March 2018. [Google Scholar]
- Palit, S.; Sinha, S.; Britto, S.R.A.; Selvakumar, A.A. CFD analysis of flow around fish. J. Phys. Conf. Ser. 2019, 1276. [Google Scholar] [CrossRef] [Green Version]
- ANSYS, Fluids—CFD Simulation Software|ANSYS. Available online: http://www.ansys.com/products/fluids. (accessed on 10 September 2017).
- Rahman, H.; Mohd, N.A.; Lazim, T.M. Aerodynamics of harmonically oscillating aerofoil at low reynolds number. J. Aerosp. Technol. Manag. 2017, 9, 83–90. [Google Scholar]
- Breder, C.M., Jr. The locomotion of fishes. Zoologica 1926, 4, 159–291. [Google Scholar]
- Videler, J.J.; Hess, F. Fast continuous swimming of two pelagic predators, saithe (Pollachius virens) and mackerel (Scomber scombrus): A. kinematic analysis. J. Exp. Biol. 1984, 109, 209–228. [Google Scholar] [CrossRef]
- Coughlin, D.J.; Wilson, L.T.; Kwon, E.S.; Travitz, L.S. Thermal acclimation of rainbow trout myotomal muscle, can trout acclimate to a warming environment? Comp. Biochem. Physiol. Part A Mol. Integr. Physiol. 2020, 245. [Google Scholar] [CrossRef]
- Liao, J.C.; Beal, D.N.; Lauder, G.V.; Triantafyllou, M.S. The Kármán gait: Novel body kinematics of rainbow trout swimming in a vortex street. J. Exp. Biol. 2003, 206, 1059–1073. [Google Scholar] [CrossRef] [Green Version]
- Akanyeti, O.; Liao, J.C. A kinematic model of Kármán gaiting in rainbow trout. J. Exp. Biol. 2013, 216, 4666–4677. [Google Scholar] [CrossRef] [Green Version]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fouladi, K.; Coughlin, D.J. CFD Investigation of Trout-Like Configuration Holding Station near an Obstruction. Fluids 2021, 6, 204. https://doi.org/10.3390/fluids6060204
Fouladi K, Coughlin DJ. CFD Investigation of Trout-Like Configuration Holding Station near an Obstruction. Fluids. 2021; 6(6):204. https://doi.org/10.3390/fluids6060204
Chicago/Turabian StyleFouladi, Kamran, and David J. Coughlin. 2021. "CFD Investigation of Trout-Like Configuration Holding Station near an Obstruction" Fluids 6, no. 6: 204. https://doi.org/10.3390/fluids6060204
APA StyleFouladi, K., & Coughlin, D. J. (2021). CFD Investigation of Trout-Like Configuration Holding Station near an Obstruction. Fluids, 6(6), 204. https://doi.org/10.3390/fluids6060204