
The Nonlinear Dynamic Behavior of a Particle on a Vibrating Screen Based on the Elastoplastic Contact Model


Abstract
:1. Introduction
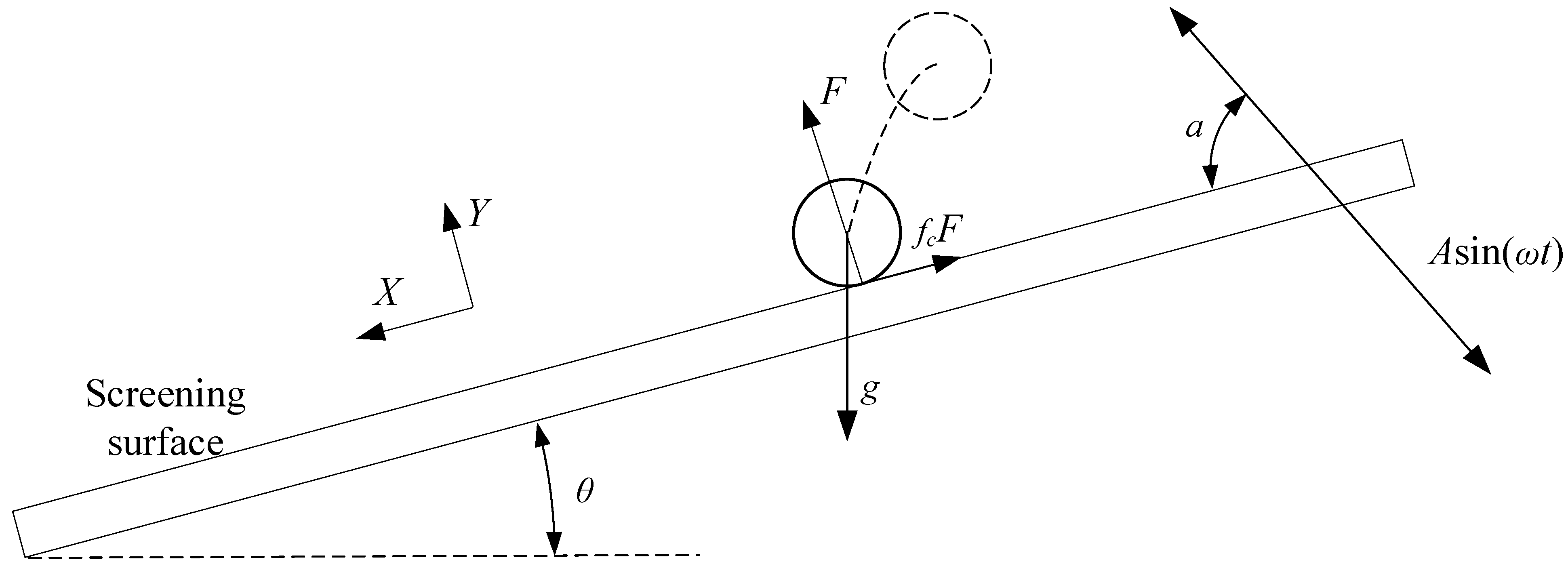
2. Dynamic Equations of a Particle on Vibrating Screening
- The particle has no contact with the screen surface and flies freely.
- The particle impacts the screen surface with elastic loading.
- The particle impacts the screen surface with elastoplastic loading.
- The particle impacts the screen surface with elastic unloading and returns to period 1.
- The screen surface of the vibrating screen is rigid.
- The tangential displacement of granular materials is ignored, and only the fraction is considered.
- The rolling of granular materials is ignored.
3. Results and Discussion
3.1. Material Properties of the P–VS System
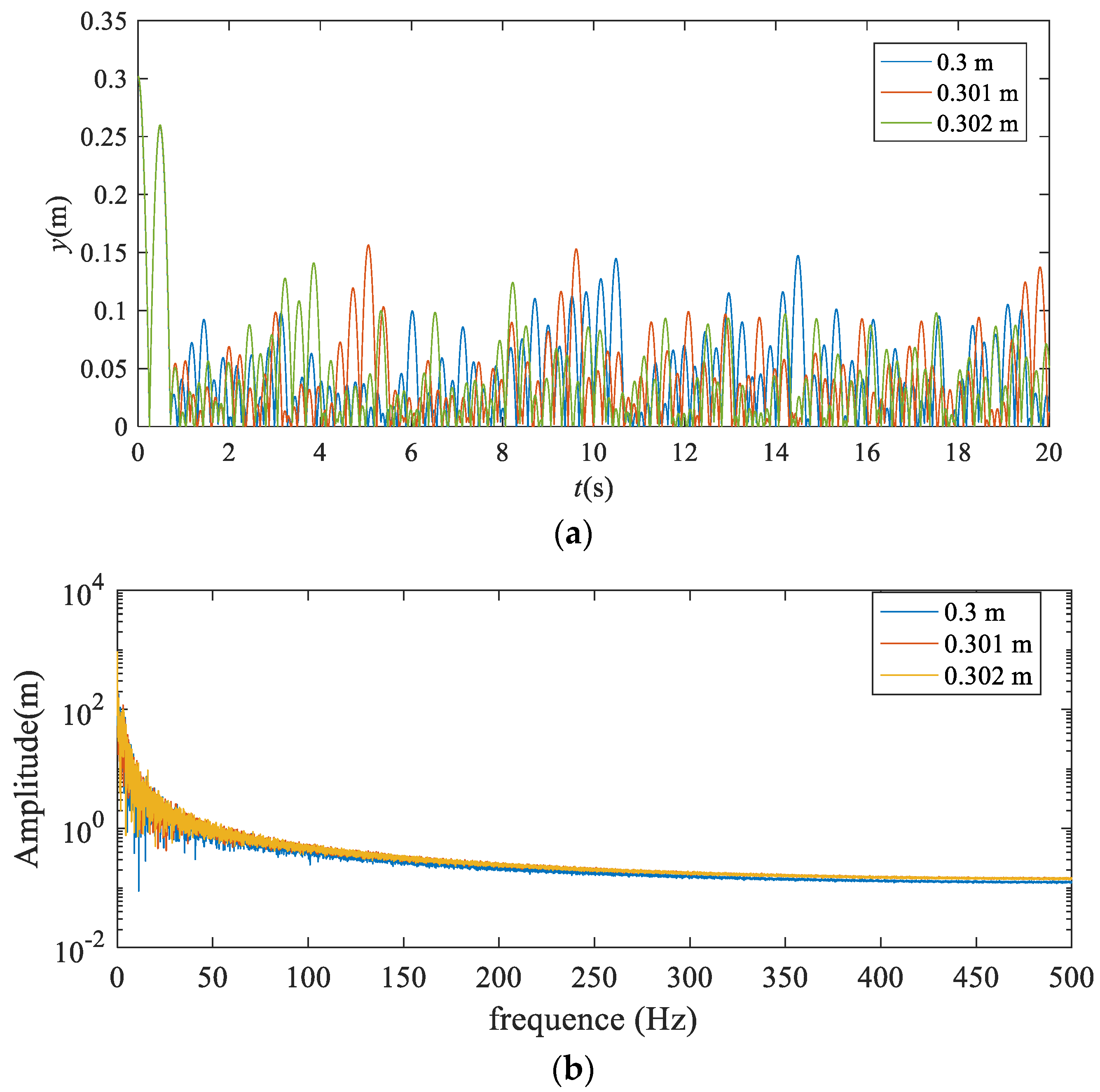
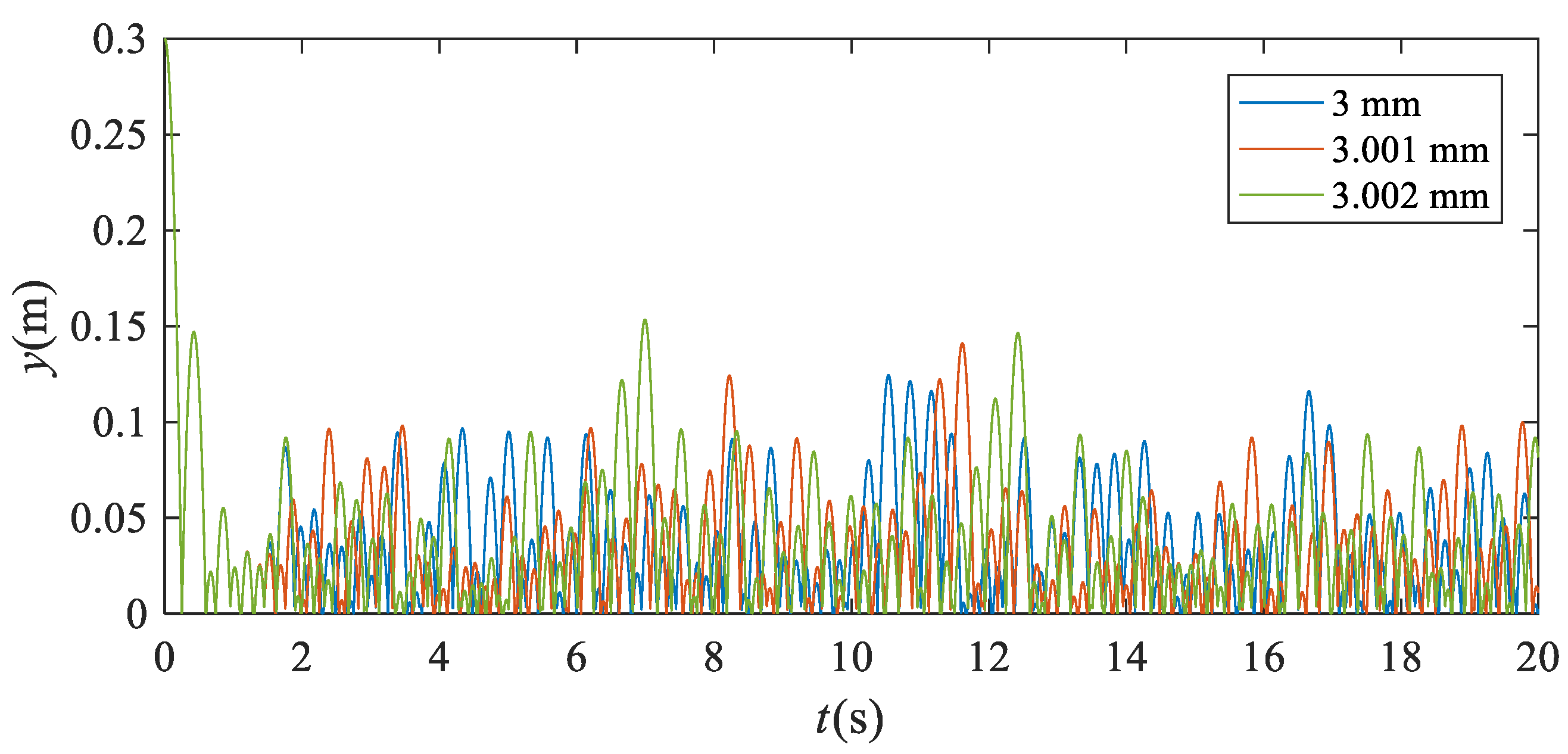
3.2. The Dynamic Behavior with Different Falling Heights and Particle Radii
3.3. Formatting of Mathematical Components
3.4. Effects of Frequency on the Dynamic Behavior of P–VS System
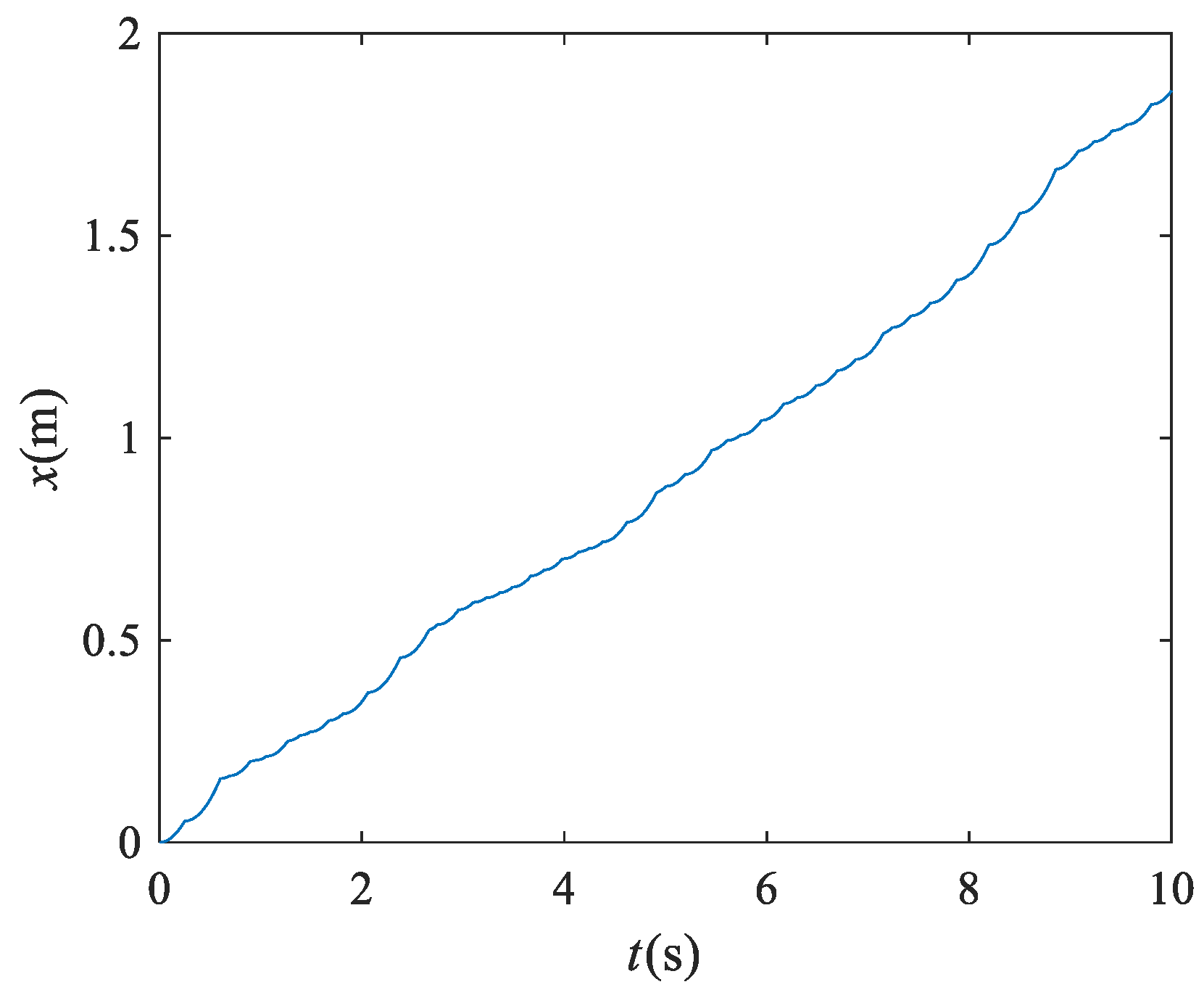
3.5. The Dynamic Behavior of a Particle along the Screening Surface
4. Conclusions
- (1)
- The P–VS system is strongly nonlinear. A small change in parameters, such as the initial falling height and radius of the particle, will significantly affect the trajectory of the particle.
- (2)
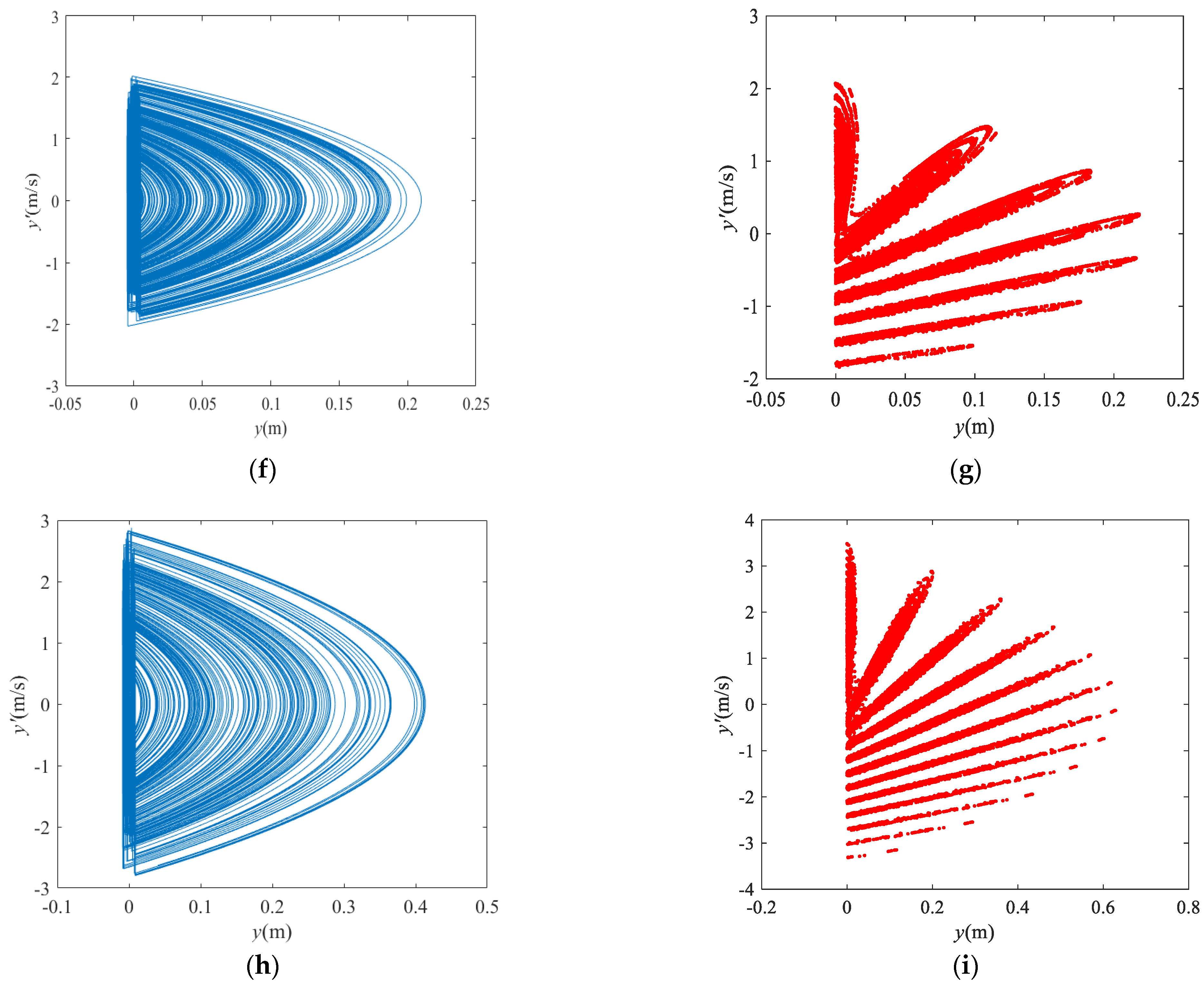
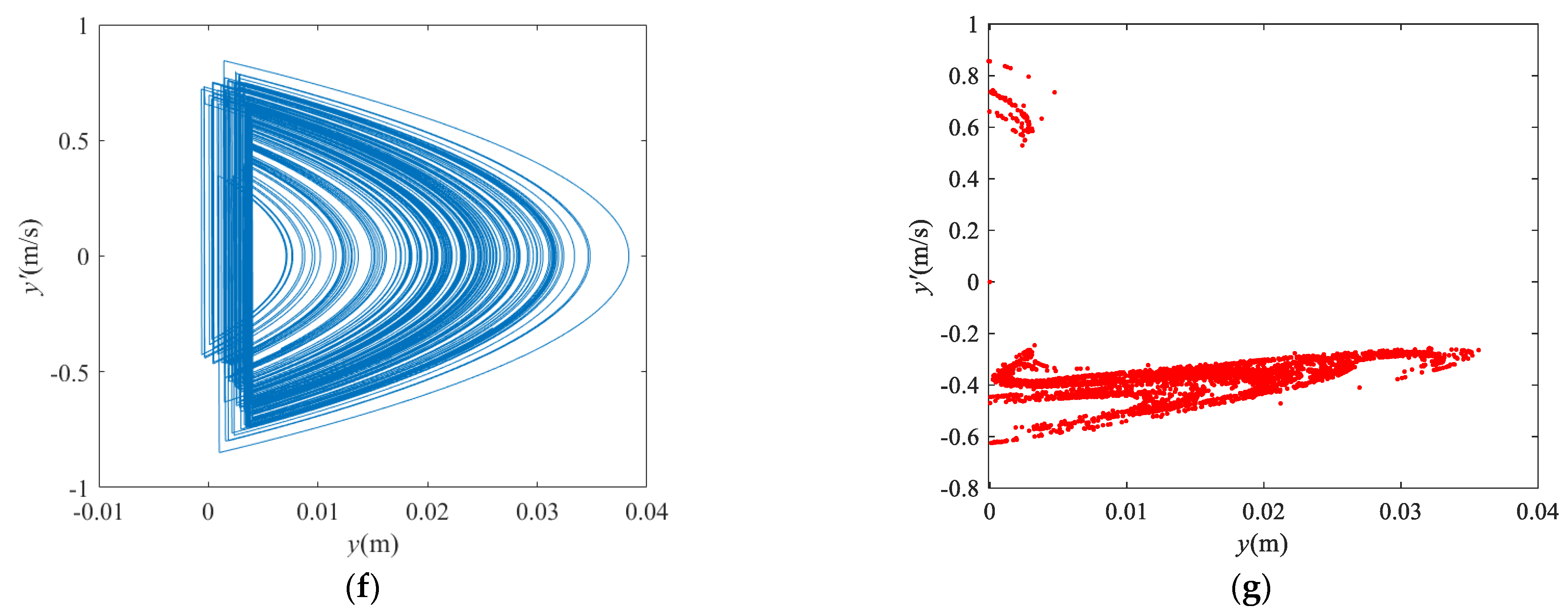
- In the normal direction of the vibrating screen, the P–VS motion is quasiperiodic at low frequencies. With increasing frequency or amplitude, the motion of the P–VS system becomes chaotic, and its Poincaré map becomes petal-shaped. In addition, the number of petals increases at the mutation of the bifurcation diagram.
- (3)
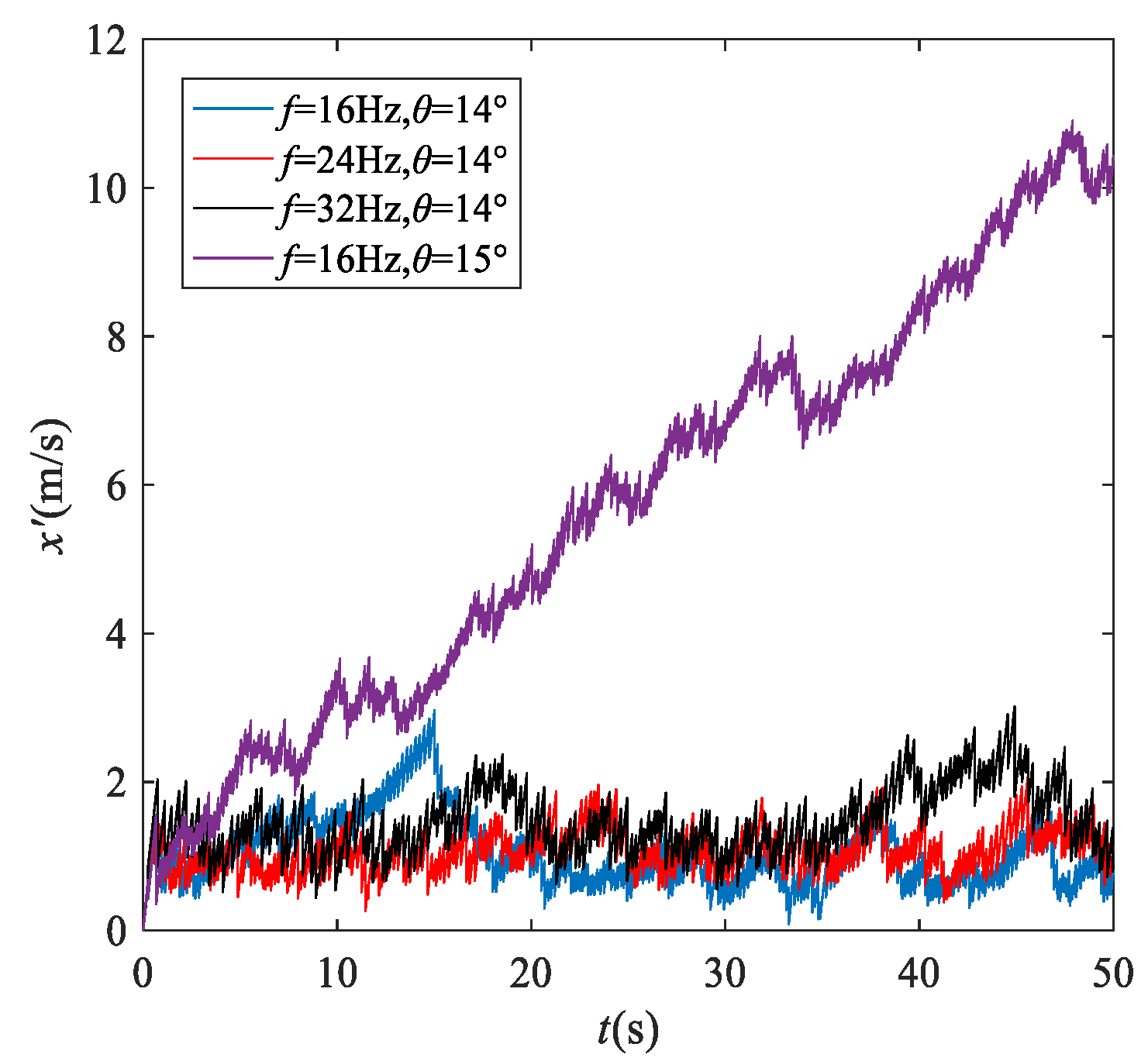
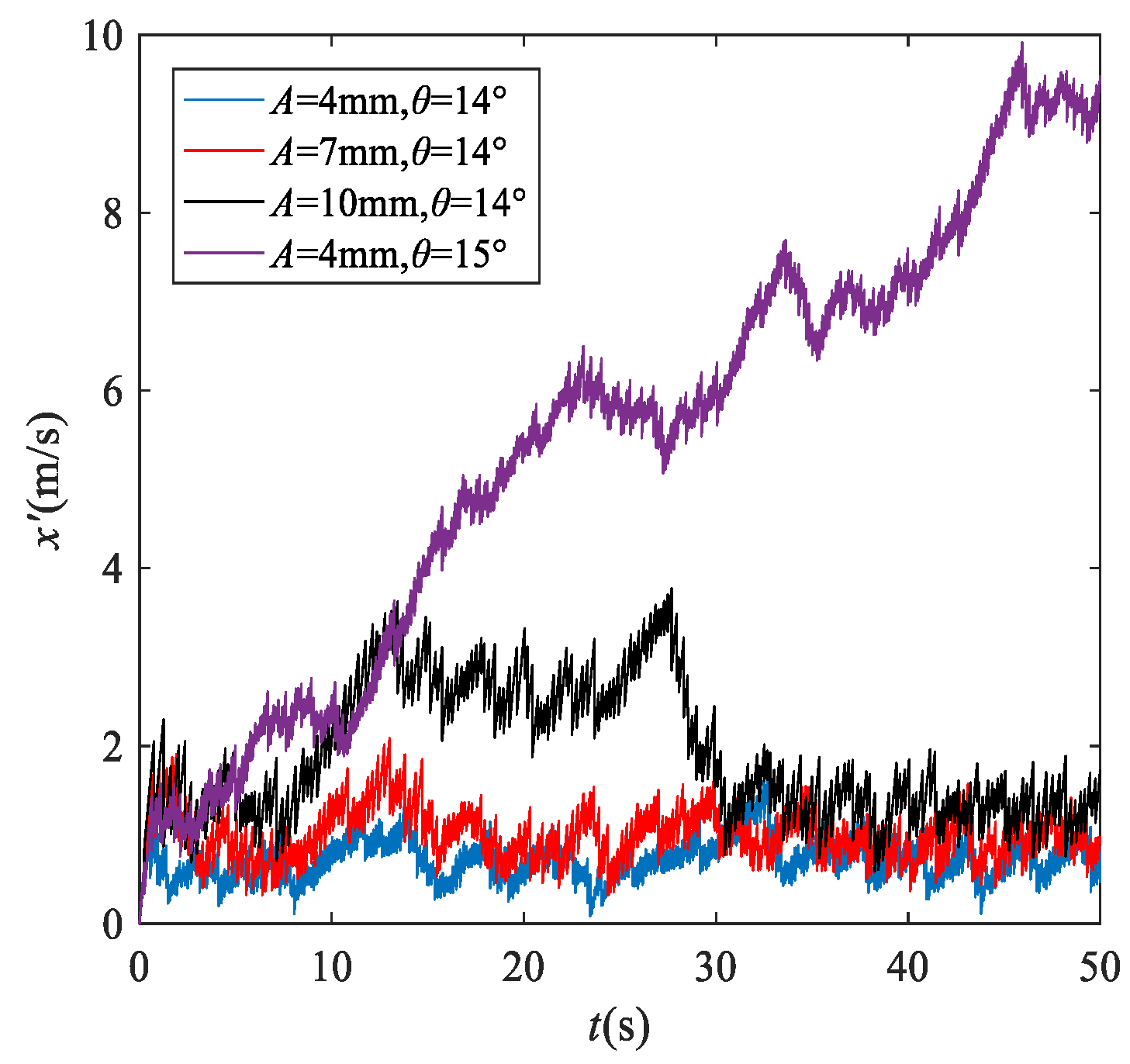
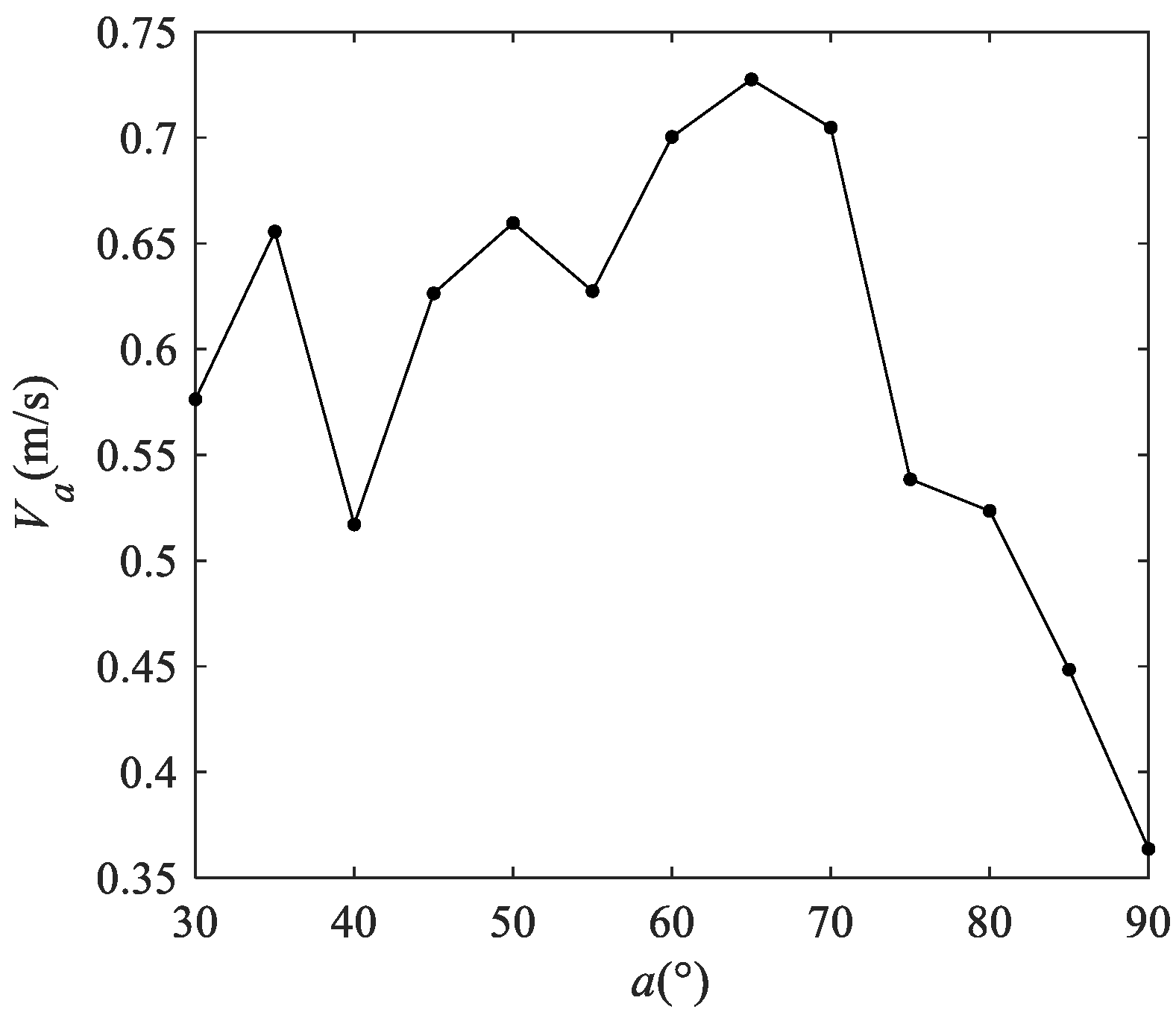
- An increase in frequency, amplitude and inclination angle and a decrease in friction coefficient lead to an increase in particle speed along the screen surface. In addition, the particle speed reaches a maximum when the vibration direction angle is 65°.
- (4)
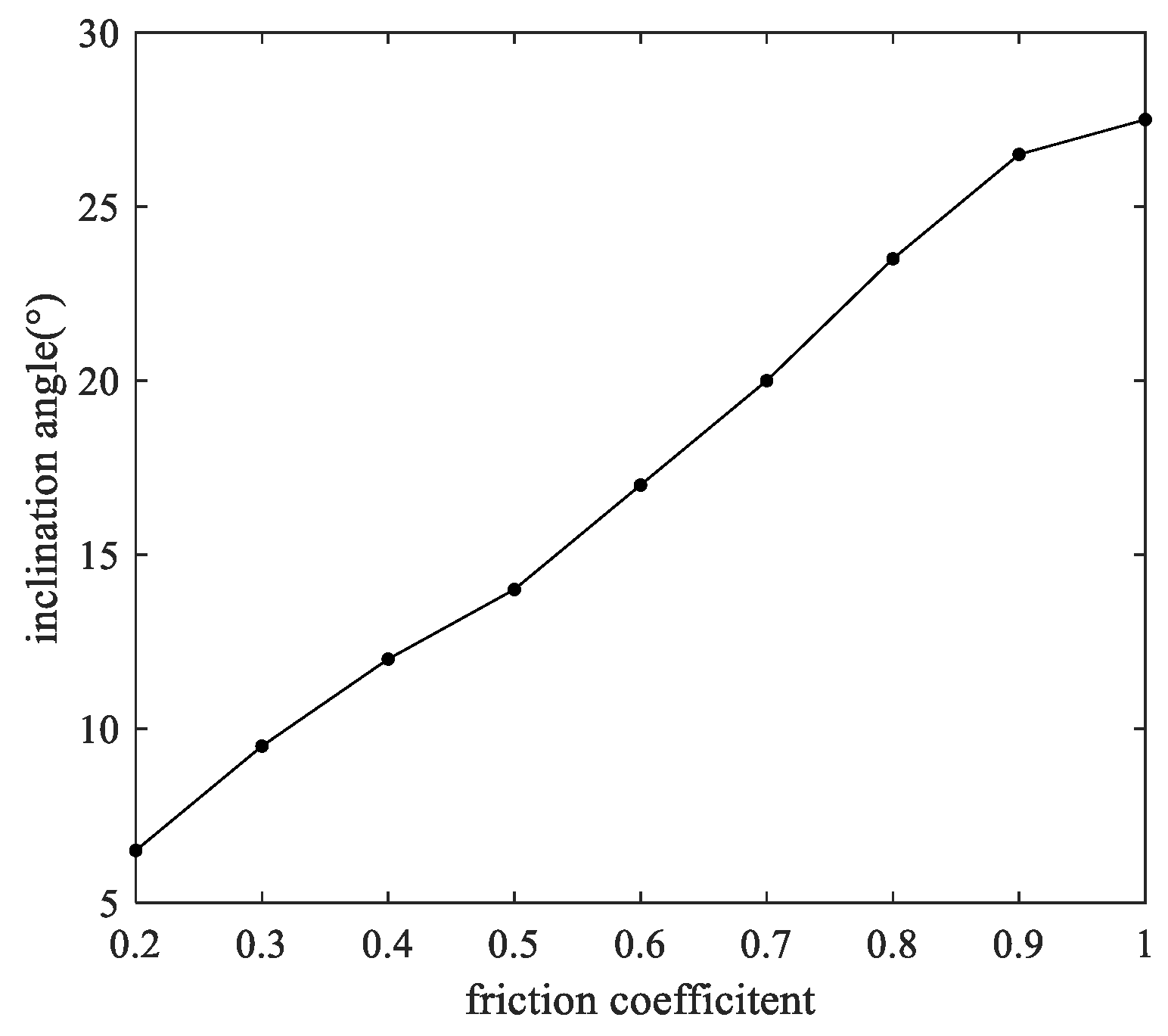
- The divergence and convergence of particle motion along the screening surface are only affected by the inclination angle and friction coefficient for the granular coal material.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Peng, L.; Wang, Z.; Ma, W.; Chen, X.; Zhao, Y.; Liu, C. Dynamic influence of screening coals on a vibrating screen. Fuel 2018, 216, 484–493. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Xia, H.; Tong, X. Performance optimization of the elliptically vibrating screen with a hybrid MACO-GBDT algorithm. Particuology 2021, 56, 193–206. [Google Scholar] [CrossRef]
- Jiang, H.; Qiao, J.; Zhao, Y.; Duan, C.; Luo, Z.; Liu, C.; Yang, Y.; He, J.; Zhao, L.; Pan, M. Evolution process and regulation of particle kinematics and spatial distribution driven by exciting parameters during variable-amplitude screening. Powder Technol. 2018, 330, 292–303. [Google Scholar] [CrossRef]
- Horenstein, M.N.; Mazumder, M.; Sumner, R.C. Predicting particle trajectories on an electrodynamic screen—Theory and experiment. J. Electrost. 2013, 71, 185–188. [Google Scholar] [CrossRef]
- Jiang, Y.-Z.; He, K.-F.; Dong, Y.-L.; Yang, D.-l.; Sun, W. Influence of Load Weight on Dynamic Response of Vibrating Screen. Shock Vib. 2019, 2019, 4232730. [Google Scholar] [CrossRef]
- Zhao, L.; Zhao, Y.; Bao, C.; Hou, Q.; Yu, A. Optimisation of a circularly vibrating screen based on DEM simulation and Taguchi orthogonal experimental design. Powder Technol. 2017, 310, 307–317. [Google Scholar] [CrossRef]
- Pan, J.W.; Li, J.; Hong, G.Y.; Bai, J. A mapping discrete element method for nonlinear dynamics of vibrating plate-particle coupling system. Powder Technol. 2021, 385, 478–489. (In English) [Google Scholar] [CrossRef]
- Jiang, H.; Yu, S.; Huang, L.; Zhao, Y.; Cao, X. Kinematics and mechanism of rigid-flex elastic screening for moist coal under disequilibrium excitation. Int. J. Coal Prep. Util. 2020, 42, 1724–1739. [Google Scholar] [CrossRef]
- Wang, L.; Ding, Z.; Meng, S.; Zhao, H.; Song, H. Kinematics and dynamics of a particle on a non-simple harmonic vibrating screen. Particuology 2017, 32, 167–177. [Google Scholar] [CrossRef]
- Yang, Y.; Wan, L.R. Study on the Vibroimpact Response of the Particle Elastic Impact on the Metal Plate. Shock Vib. 2019, 2019, 1–13. (In English) [Google Scholar] [CrossRef]
- Dong, J.; Fang, J.; Pan, J.; Hong, G.; Li, J. Dynamic model of vibrating plate coupled with a granule bed. Chaos Solitons Fractals 2022, 156, 111857. [Google Scholar] [CrossRef]
- GFF, G. Hertz’s Miscellaneous Papers. Nature 1896, 55, 6–9. [Google Scholar]
- Hunt, K.; Crossley, E. Coefficient of restitution interpreted as damping in vibroimpact. J. Appl. Mech. 1975, 42, 440–445. [Google Scholar] [CrossRef]
- Thornton, C. Coefficient of Restitution for Collinear Collisions of Elastic-Perfectly Plastic Spheres. J. Appl. Mech. 1997, 64, 383–386. [Google Scholar] [CrossRef]
- Jian, B.; Hu, G.M.; Fang, Z.Q.; Zhou, H.J.; Xia, R. A normal contact force approach for viscoelastic spheres of the same material. Powder Technol. 2019, 350, 51–61. [Google Scholar] [CrossRef]
- Safaeifar, H.; Farshidianfar, A. A new model of the contact force for the collision between two solid bodies. Multibody Syst. Dyn. 2020, 50, 233–257. [Google Scholar] [CrossRef]
- Shen, Y.; Xiang, D.; Wang, X.; Jiang, L.; Wei, Y. A contact force model considering constant external forces for impact analysis in multibody dynamics. Multibody Syst. Dyn. 2018, 44, 397–419. [Google Scholar] [CrossRef]
- Vu-Quoc, L.; Zhang, X.; Lesburg, L. Normal and tangential force–displacement relations for frictional elasto-plastic contact of spheres. Int. J. Solids Struct. 2001, 38, 6455–6489. [Google Scholar] [CrossRef]
- Yang, Y.; Cheng, Y.M. A fractal model of contact force distribution and the unified coordination distribution for crushable granular materials under confined compression. Powder Technol. 2015, 279, 1–9. (In English) [Google Scholar] [CrossRef]
- Ye, Y.; Zeng, Y.W.; Chen, X.; Sun, H.Q.; Ma, W.J.; Peng, Z.X. Development of a viscoelastoplastic contact model for the size- and velocity-dependent normal restitution coefficient of a rock sphere upon impact. Comput. Geotech. 2021, 132, 104014. (In English) [Google Scholar] [CrossRef]
- Yu, J.; Chu, J.; Li, Y.; Guan, L. An improved compliant contact force model using a piecewise function for impact analysis in multibody dynamics. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 424–432. [Google Scholar] [CrossRef]
- Zhang, J.; Li, W.; Zhao, L.; He, G. A continuous contact force model for impact analysis in multibody dynamics. Mech. Mach. Theory 2020, 153, 103946. [Google Scholar] [CrossRef]
- Zhao, P.; Liu, J.; Li, Y.; Wu, C. A spring-damping contact force model considering normal friction for impact analysis. Nonlinear Dyn. 2021, 105, 1437–1457. [Google Scholar] [CrossRef]
- da Silva, M.R.; Marques, F.; da Silva, M.T.; Flores, P. A compendium of contact force models inspired by Hunt and Crossley’s cornerstone work. Mech. Mach. Theory 2022, 167, 104501. (In English) [Google Scholar] [CrossRef]
- Ji, S.; Liu, L. Contact Force Models for Granular Materials. In Computational Granular Mechanics and Its Engineering Applications; Ji, S., Liu, L., Eds.; Springer: Singapore, 2020; pp. 51–96. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Density (kg/m3) | 1300 |
| Elastic modulus (Pa) | 3.5 × 109 |
| Compressive stress (Mpa) | 30 |
| Radius (mm) | 3 |
| Frequency of vibrating screen f (Hz) | 8–26 |
| Amplitude of vibrating screen A (mm) | 1–10 |
| Inclination angle of vibrating screen θ (°) | 6–30 |
| Vibration mode | Linear |
| Friction coefficient fc | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, D.; Liu, C.; Li, S. The Nonlinear Dynamic Behavior of a Particle on a Vibrating Screen Based on the Elastoplastic Contact Model. Separations 2022, 9, 216. https://doi.org/10.3390/separations9080216
He D, Liu C, Li S. The Nonlinear Dynamic Behavior of a Particle on a Vibrating Screen Based on the Elastoplastic Contact Model. Separations. 2022; 9(8):216. https://doi.org/10.3390/separations9080216
Chicago/Turabian StyleHe, Deyi, Chusheng Liu, and Sai Li. 2022. "The Nonlinear Dynamic Behavior of a Particle on a Vibrating Screen Based on the Elastoplastic Contact Model" Separations 9, no. 8: 216. https://doi.org/10.3390/separations9080216
APA StyleHe, D., Liu, C., & Li, S. (2022). The Nonlinear Dynamic Behavior of a Particle on a Vibrating Screen Based on the Elastoplastic Contact Model. Separations, 9(8), 216. https://doi.org/10.3390/separations9080216