
Reducing the Primary Resonance Vibrations of a Cantilever Beam Using a Proportional Fractional-Order Derivative Controller


Abstract
1. Introduction
2. Mathematical Treatment
3. Fixed-Point Solution
4. Nonlinear Solution
5. Numerical Investigation
6. Conclusions
- A smaller order of fractional derivative leads to greater control efficiency in reducing system vibrations, as illustrated in Table 1.
- There is good agreement between the approximate and numerical results, as shown in Table 2.
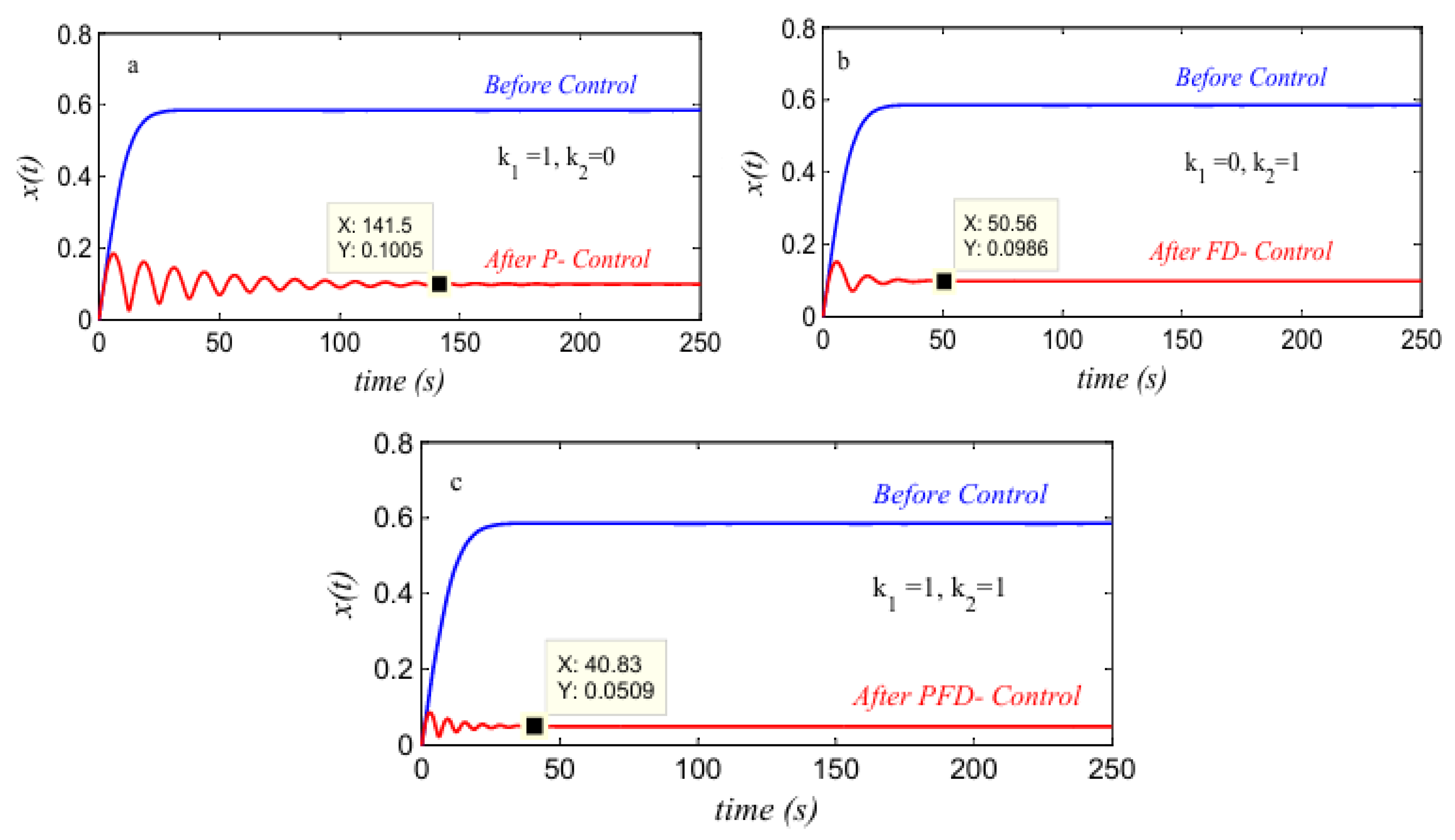
- The efficiency of the PD-Controller is equal to 8.
- The efficiency of the PFD-Controller is equal to 12.
- Adding the fractional derivative increases the efficiency of the PD-Controller in the primary resonance case (), i.e., at .
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Onur Ekici, H.; Boyaci, H. Effects of non-ideal boundary conditions on vibrations of microbeams. J. Vib. Control 2007, 13, 1369–1378. [Google Scholar] [CrossRef]
- Kuang, J.H.; Chen, C.J. Dynamic characteristics of shaped micro-actuators solved using the differential quadrature method. J. Micromech. Microeng. 2004, 14, 647–655. [Google Scholar] [CrossRef]
- Abdel-Rahman, E.M.; Younis, M.I.; Nayfeh, A.H. Characterization of the mechanical behavior of an electrically actuated microbeam. J. Micromech. Microeng. 2002, 12, 759–766. [Google Scholar] [CrossRef]
- Younis, M.I.; Nayfeh, A.H. A study of the nonlinear response of a resonant microbeam to an electric actuation. Nonlinear Dyn. 2003, 31, 91–117. [Google Scholar] [CrossRef]
- Amer, Y.A.; EL-Sayed, A.T.; EL-Salam, M.A. Non-linear Saturation Controller to Reduce the Vibrations of Vertical Conveyor Subjected to External Excitation. Asian Res. J. Math. 2018, 11, 1–26. [Google Scholar] [CrossRef]
- Eftekhari, M.; Ziaei-Rad, S.; Mahzoon, M. Vibration suppression of a symmetrically cantilever composite beam using internal resonance under chordwise base excitation. Int. J. Non-Linear Mech. 2013, 48, 86–100. [Google Scholar] [CrossRef]
- Amer, Y.A.; Abd EL-Salam, M.N.; EL-Sayed, M.A. Behavior of a Hybrid Rayleigh-Van der Pol-Duffing Oscillator with a PD Controller. J. Appl. Res. Technol. 2022, 20, 58–67. [Google Scholar]
- Amer, Y.A.; Abdullah, R.E.; Khaled, O.M.; Mahdy AM, S.; El-Salam, M.N. Vibration Control of Smooth and Discontinuous Oscillator via Negative Derivative Feedback. J. Vib. Eng. Technol. 2024, 12, 2351–2363. [Google Scholar] [CrossRef]
- Baleanu, D.; Diethelm, K.; Scalas, E.; Trujillo, J.J. Fractional Calculus: Models and Numerical Methods; World Scientific: Singapore, 2012; Volume 3. [Google Scholar]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu-Batlle, V. Fractional-Order Systems and Controls: Fundamentals and Applications; Springer: London, UK, 2010. [Google Scholar]
- Mainardi, F. Fractional Calculus and Waves in Linear Viscoelasticity: An Introduction to Mathematical Models; World Scientific: Singapore, 2010. [Google Scholar]
- El-Shourbagy, S.M.; Saeed, N.A.; Kamel, M.; Raslan, K.R.; Nasr, E.A.; Awrejcewicz, J. On the Performance of a Nonlinear Position-Velocity Controller to Stabilize Rotor-Active Magnetic-Bearings System. Symmetry 2021, 13, 2069. [Google Scholar] [CrossRef]
- El-Shourbagy, S.M.; Saeed, N.A.; Kamel, M.; Raslan, K.R.; Aboudaif, M.K.; Awrejcewicz, J. Control Performance, Stability Conditions, and Bifurcation Analysis of the Twelve-Pole Active Magnetic Bearings System. Appl. Sci. 2021, 11, 10839. [Google Scholar] [CrossRef]
- Saeed, N.A.; El-Shourbagy, S.M.; Kamel, M.; Raslan, K.R.; Aboudaif, M.K. Nonlinear dynamics and static biforcations control of the 12-pole magnetic bearings system utilizing the integral resonant control strategy. J. Low Freq. Noise Vib. Act. Control 2022, 13, 2069. [Google Scholar] [CrossRef]
- Saeed, N.A.; El-Shourbagy, S.M.; Kamel, M.; Raslan, K.R.; Awrejcewicz, J.; Gepreel, K.A. Suppressing the resonant vibrations and eliminating the nonlinear bifurcation of a twelve-poles electro-magnetic rotor system using a novel control algorithm. Appl. Sci. 2022, 12, 8300. [Google Scholar] [CrossRef]
- El-Salam, M.N.A.; Amer, Y.A.; Darwesh, F.O. Effect of negative velocity feedback control on the vibration of a nonlinear dynamical system. Int. J. Dyn. Control 2023, 11, 2842–2855. [Google Scholar] [CrossRef]
- Ibrahim, K. Optimal PI–PD Controller Design for Pure Integrating Processes with Time Delay. J. Control Autom. Electr. Syst. 2021, 32, 563–572. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, H. Stability of a linear oscillator with damping force of the fractional-order derivative. Sci. China Phys. Mech. Astron. 2010, 53, 345–352. [Google Scholar] [CrossRef]
- Wang, Z.H.; Du, M.L. Asymptotical behavior of the solution of a SDOF linear fractionally damped vibration system. Shock Vib. 2011, 18, 257–268. [Google Scholar] [CrossRef]
- Leung AY, T.; Yang, H.X.; Zhu, P. Neimark bifurcations of a generalized Duffing–van der Pol oscillator with nonlinear fractional order damping. Int. J. Bifurc. Chaos 2013, 23, 1350177. [Google Scholar] [CrossRef]
- Leung, A.Y.; Guo, Z. Forward residue harmonic balance for autonomous and non-autonomous systems with fractional derivative damping. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2169–2183. [Google Scholar] [CrossRef]
- Leung AY, T.; Yang, H.X.; Guo, Z.J. The residue harmonic balance for fractional order van der Pol like oscillators. J. Sound Vib. 2012, 331, 1115–1126. [Google Scholar] [CrossRef]
- Xie, F.; Lin, X. Asymptotic solution of the van der Pol oscillator with small fractional damping. Phys. Scr. 2009, 2009, 1–4. [Google Scholar] [CrossRef]
- Barbosa, R.S.; Machado, J.T.; Vinagre, B.M.; Calderon, A.J. Analysis of the Van der Pol oscillator containing derivatives of fractional order. J. Vib. Control 2007, 13, 1291–1301. [Google Scholar] [CrossRef]
- Cui, Z. Primary resonance and feedback control of the fractional Duffing-van der Pol oscillator with quintic nonlinear-restoring force. AIMS Math. 2023, 8, 24929–24946. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations, Mathematics in Science and Engineering; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Nayfeh, A.H. Problems in perturbation. Appl. Opt. 1986, 25, 3145. [Google Scholar]
- Han, R. A memory-free formulation for determining the non-stationary response of fractional nonlinear oscillators subjected to combined deterministic and stochastic excitations. Nonlinear Dyn. 2023, 111, 22363–22379. [Google Scholar] [CrossRef]
- Wang, G.; Ma, L. A Dynamic Behavior Analysis of a Rolling Mill’s Main Drive System with Fractional Derivative and Stochastic Disturbance. Symmetry 2023, 15, 1509. [Google Scholar] [CrossRef]
- Zhang, Y.; Han, R.; Zhang, P. Stochastic response of chain-like hysteretic MDOF systems endowed with fractional derivative elements and subjected to combined stochastic and periodic excitation. Acta Mech. 2024, 235, 5019–5039. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Amplitude Before the Controller | ||||
|---|---|---|---|---|
| 0.1 | 0.6 | 0.02863 | 0.02005 | 0.01336 |
| 0.2 | 0.6 | 0.02883 | 0.02022 | 0.01347 |
| 0.3 | 0.6 | 0.02918 | 0.02053 | 0.01365 |
| 0.4 | 0.6 | 0.02969 | 0.02097 | 0.01391 |
| 0.5 | 0.6 | 0.03037 | 0.02158 | 0.01425 |
| 0.6 | 0.6 | 0.03123 | 0.02235 | 0.0147 |
| 0.7 | 0.6 | 0.03228 | 0.02334 | 0.01526 |
| 0.8 | 0.6 | 0.03357 | 0.02458 | 0.01594 |
| 0.9 | 0.6 | 0.03511 | 0.02612 | 0.01677 |
| 1 | 0.6 | 0.03693 | 0.02806 | 0.01777 |
| Time | Approximate Solution After PFD (α = 0.1) (Average Method) | Numerical Solution After PFD (α = 0.1) (Runge–Kutta Method) | Approximate Solution After PD (α = 1) (Average Method) | Numerical Solution After PD (α = 1) (Runge–Kutta Method) |
|---|---|---|---|---|
| 80.45 | 0.02863 | 0.02863 | 0.03693 | 0.03693 |
| 100.3 | 0.02863 | 0.02863 | 0.03693 | 0.03693 |
| 115.3 | 0.02863 | 0.02863 | 0.03693 | 0.03693 |
| 145.9 | 0.02863 | 0.02863 | 0.03693 | 0.03693 |
| 170 | 0.02863 | 0.02863 | 0.03693 | 0.03693 |
| 200 | 0.02863 | 0.02863 | 0.03693 | 0.03693 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Salam, M.N.A.; Hussein, R.K. Reducing the Primary Resonance Vibrations of a Cantilever Beam Using a Proportional Fractional-Order Derivative Controller. Mathematics 2025, 13, 1886. https://doi.org/10.3390/math13111886
El-Salam MNA, Hussein RK. Reducing the Primary Resonance Vibrations of a Cantilever Beam Using a Proportional Fractional-Order Derivative Controller. Mathematics. 2025; 13(11):1886. https://doi.org/10.3390/math13111886
Chicago/Turabian StyleEl-Salam, M.N. Abd, and Rageh K. Hussein. 2025. "Reducing the Primary Resonance Vibrations of a Cantilever Beam Using a Proportional Fractional-Order Derivative Controller" Mathematics 13, no. 11: 1886. https://doi.org/10.3390/math13111886
APA StyleEl-Salam, M. N. A., & Hussein, R. K. (2025). Reducing the Primary Resonance Vibrations of a Cantilever Beam Using a Proportional Fractional-Order Derivative Controller. Mathematics, 13(11), 1886. https://doi.org/10.3390/math13111886