


Dynamical Sphere Regrouping Particle Swarm Optimization: A Proposed Algorithm for Dealing with PSO Premature Convergence in Large-Scale Global Optimization

 , , and
, , and
Abstract
:1. Introduction
Contribution
2. Materials and Methods
2.1. Biological Inspiration
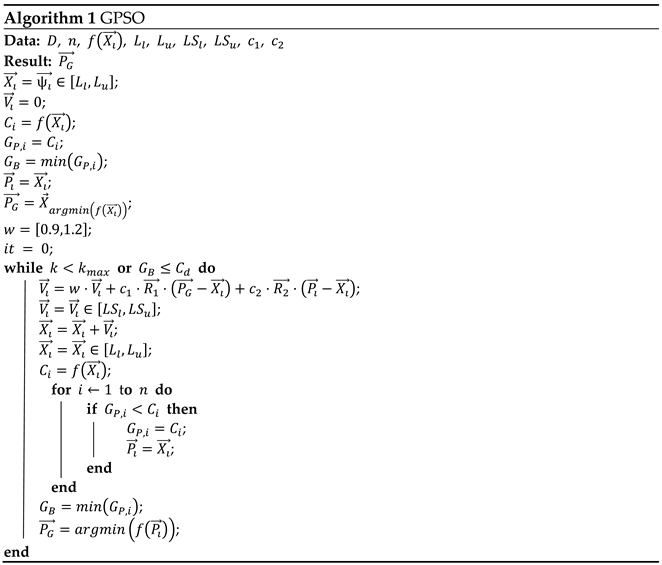
2.2. GPSO
2.3. Dealing with Local Optimums in PSO
- Stop the search and accept the result.
- Continue the search while hoping to find a better solution.
- Restart the swarm from new locations and search again.
- Mark the areas in the search space that lead to a local optimum and avoid them.
- Reinvigorate the swarm to maintain diversity.
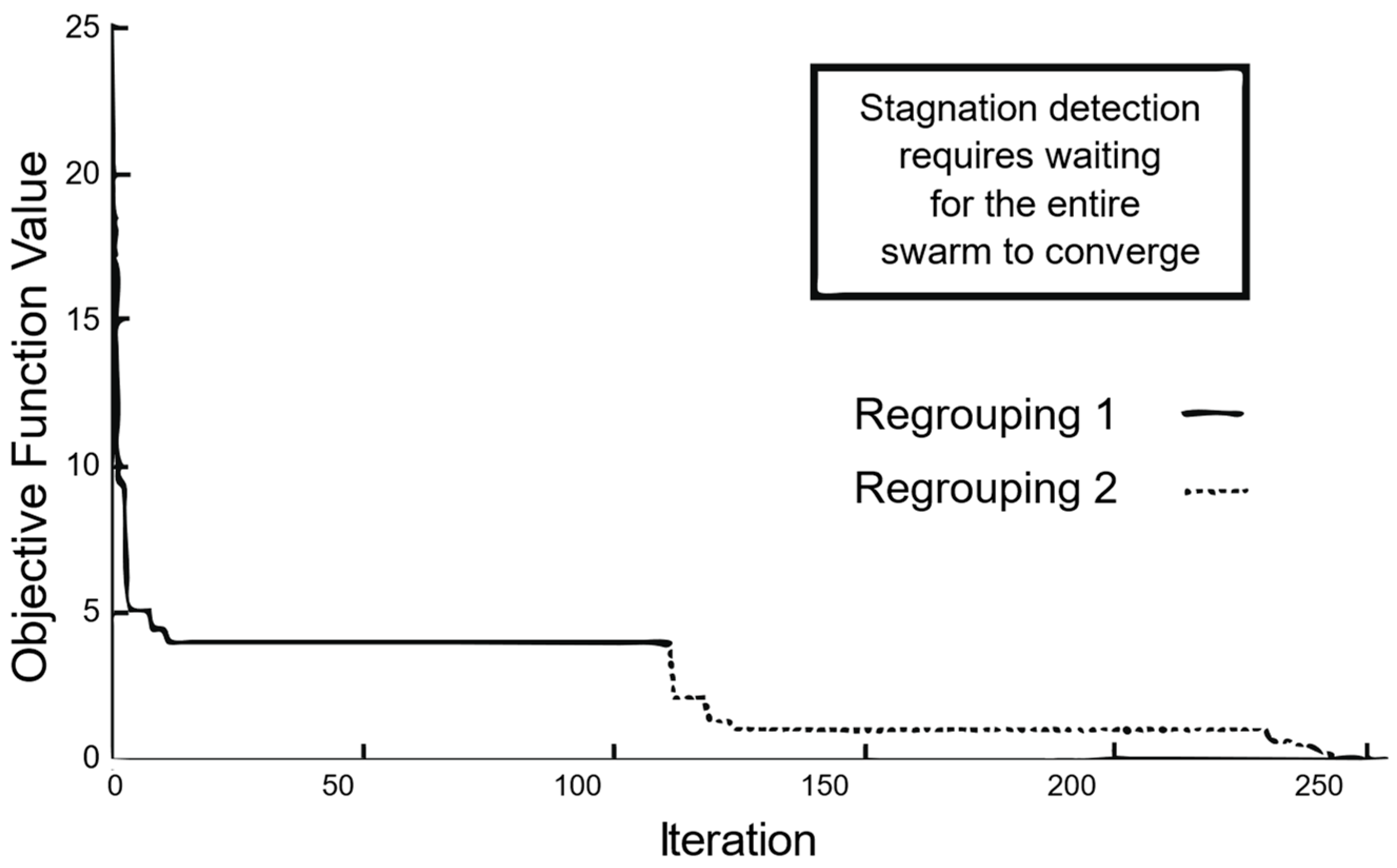
2.4. Regrouping PSO

2.5. Dynamical Sphere Regrouping PSO (DSRegPSO)
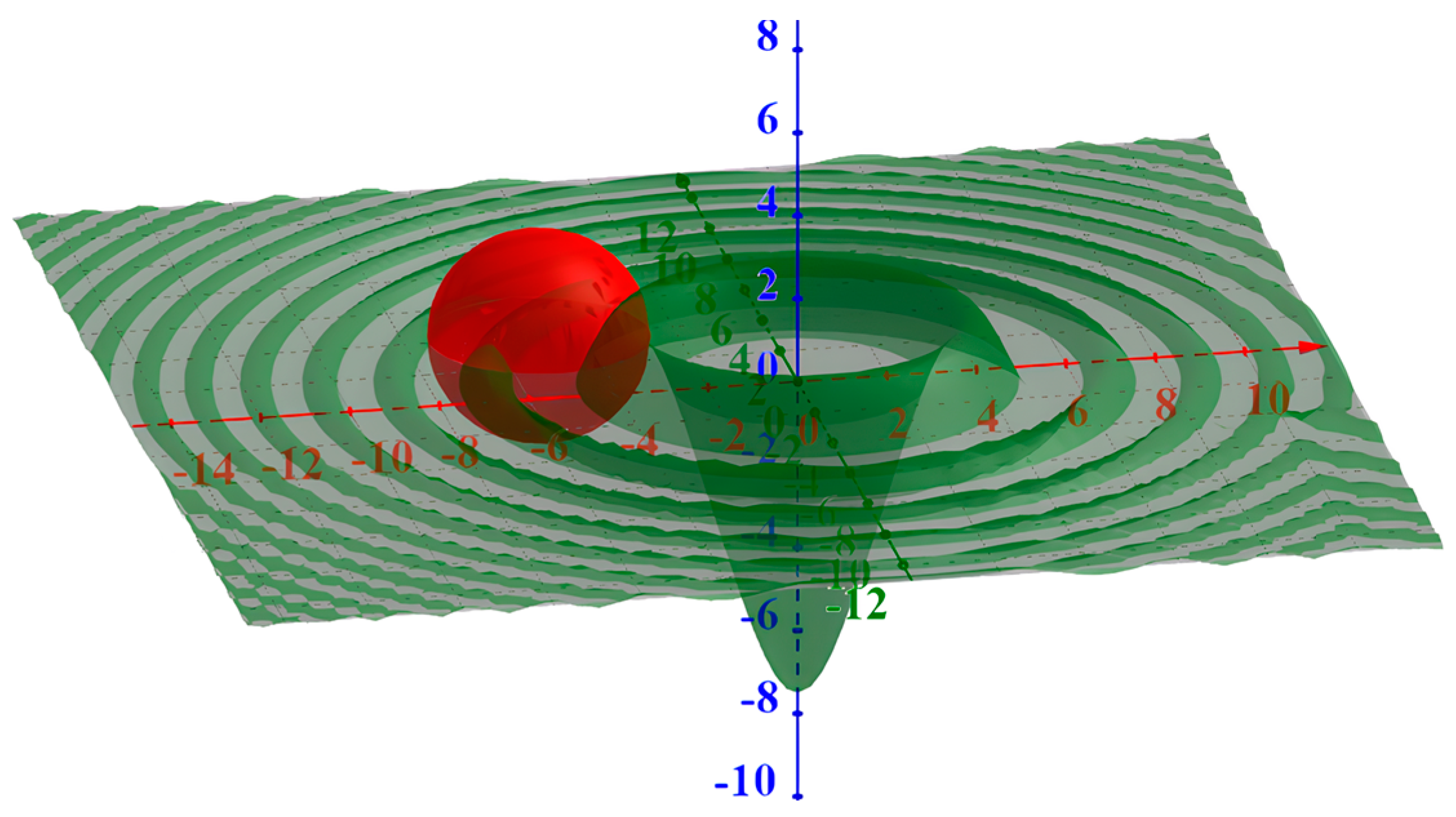
2.5.1. DSRegPSO Inspiration
2.5.2. The DSRegPSO Algorithm

3. Results and Discussion
- , , , , and were specified by the requirements for the optimized functions in each function of CEC’13.
- We assumed that the remaining input parameters are linearly independent. Based on this assumption, we chose the values that resulted in the best cost for each benchmark by varying them heuristically within the ranges specified in Section 3.1.
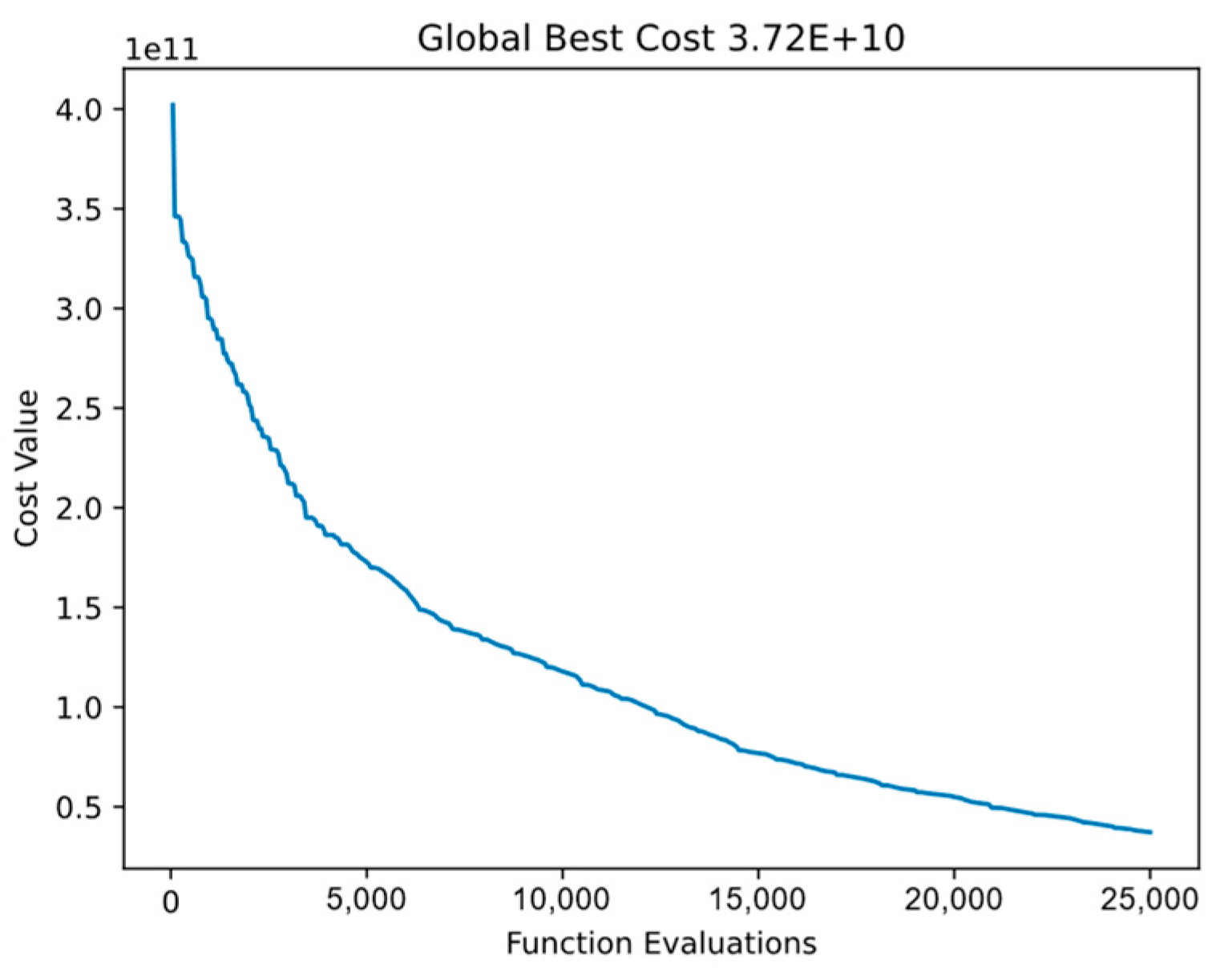
3.1. Results of the CEC’13 Test
- Fully separable functions:
- Elliptic with and .
- Rastrigin with and .
- Ackley with and .
- Partially Additively Separable Functions:
- Functions with a separable subcomponent:
- Elliptic with and .
- Rastrigin with and .
- Ackley with and .
- Schwefels Problem 1.2 with and .
- Functions with no separable subcomponents:
- Elliptic with and .
- Rastrigin with and .
- Ackley with and .
- Schwefels Problem 1.2 with and .
- Overlapping Functions:
- Rosenbrock’s with and .
- Schwefels with Conforming Overlapping Subcomponents with and .
- Schwefels with Conflicting Overlapping Subcomponents with and .
- Non-separable Functions:
- Schwefels Problem 1.2 with and .
- .
- .
- .
- .
- .
- .
- .
- .
- .
- .
- .
- .
- .
- .
4. Conclusions
Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sedighizadeh, D.; Masehian, E.; Sedighizadeh, M.; Akbaripour, H. GEPSO: A New Generalized Particle Swarm Optimization Algorithm. Math. Comput. Simul. 2021, 179, 194–212. [Google Scholar] [CrossRef]
- Senapati, M.K.; Pradhan, C.; Calay, R.K. A Computational Intelligence Based Maximum Power Point Tracking for Photovoltaic Power Generation System with Small-Signal Analysis. Optim. Control Appl. Methods 2023, 44, 617–636. [Google Scholar] [CrossRef]
- Vahedipour-Dahraie, M.; Rashidizadeh-Kermani, H.; Anvari-Moghaddam, A. Risk-Based Stochastic Scheduling of Resilient Microgrids Considering Demand Response Programs. IEEE Syst. J. 2021, 15, 971–980. [Google Scholar] [CrossRef]
- van den Bergh, F.; Engelbrecht, A.P. A Cooperative Approach to Participle Swam Optimization. IEEE Trans. Evol. Comput. 2004, 8, 225–239. [Google Scholar] [CrossRef]
- Maučec, M.S.; Brest, J. A Review of the Recent Use of Differential Evolution for Large-Scale Global Optimization: An Analysis of Selected Algorithms on the CEC 2013 LSGO Benchmark Suite. Swarm Evol. Comput. 2018, 50, 100428. [Google Scholar] [CrossRef]
- Sun, G.; Han, R.; Deng, L.; Li, C.; Yang, G. Hierarchical Structure-Based Joint Operations Algorithm for Global Optimization. Swarm Evol. Comput. 2023, 79, 101311. [Google Scholar] [CrossRef]
- Glorieux, E.; Svensson, B.; Danielsson, F.; Lennartson, B. Constructive Cooperative Coevolution for Large-Scale Global Optimization. J. Heuristics 2017, 23, 449–469. [Google Scholar] [CrossRef]
- Jiang, R.; Shankaran, R.; Wang, S.; Chao, T. A Proportional, Integral and Derivative Differential Evolution Algorithm for Global Optimization. Expert Syst. Appl. 2022, 206, 117669. [Google Scholar] [CrossRef]
- Marcelino, C.; Almeida, P.; Pedreira, C.; Caroalha, L.; Wanner, E. Applying C-DEEPSO to Solve Large Scale Global Optimization Problems. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation, CEC, Rio de Janeiro, Brazil, 8–13 July 2018. [Google Scholar] [CrossRef]
- Yang, S.; Jiang, J.; Yan, G. A Dolphin Partner Optimization. In Proceedings of the 2009 WRI Global Congress on Intelligent Systems, GCIS 2009, Xiamen, China, 19–21 May 2009; Volume 1, pp. 124–128. [Google Scholar] [CrossRef]
- Koçer, H.G.; Uymaz, S.A. A Novel Local Search Method for LSGO with Golden Ratio and Dynamic Search Step. Soft Comput. 2021, 25, 2115–2130. [Google Scholar] [CrossRef]
- Molina, D.; Latorre, A.; Herrera, F. SHADE with Iterative Local Search for Large-Scale Global Optimization. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation, CEC 2018—Proceedings, Rio de Janeiro, Brazil, 8–13 July 2018. [Google Scholar] [CrossRef]
- López, E.D.; Puris, A.; Bello, R.R. Vmode: A Hybrid Metaheuristic for the Solution of Large Scale Optimization Problems. Investig. Oper. 2015, 36, 232–239. [Google Scholar]
- LaTorre, A.; Pena, J.M. A Comparison of Three Large-Scale Global Optimizers on the CEC 2017 Single Objective Real Parameter Numerical Optimization Benchmark. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation, CEC 2017—Proceedings, Donostia, Spain, 5–8 June 2017; pp. 1063–1070. [Google Scholar] [CrossRef]
- Xia, X.; Gui, L.; He, G.; Wei, B.; Zhang, Y.; Yu, F.; Wu, H.; Zhan, Z.-H. An Expanded Particle Swarm Optimization Based on Multi-Exemplar and Forgetting Ability. Inf. Sci. 2020, 508, 105–120. [Google Scholar] [CrossRef]
- Pluhacek, M.; Senkerik, R.; Viktorin, A.; Kadavy, T. PSO with Attractive Search Space Border Points. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2017; Volume 10246, pp. 665–675. [Google Scholar] [CrossRef]
- Xu, Y.; Pi, D. A Reinforcement Learning-Based Communication Topology in Particle Swarm Optimization. Neural Comput. Appl. 2020, 32, 10007–10032. [Google Scholar] [CrossRef]
- Pluhacek, M.; Senkerik, R.; Viktorin, A.; Zelinka, I. Multi-Chaotic Approach for Particle Acceleration in PSO. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2016; Volume 9668, pp. 75–86. [Google Scholar] [CrossRef]
- Nobile, M.S.; Cazzaniga, P.; Besozzi, D.; Colombo, R.; Mauri, G.; Pasi, G. Fuzzy Self-Tuning PSO: A Settings-Free Algorithm for Global Optimization. Swarm Evol. Comput. 2018, 39, 70–85. [Google Scholar] [CrossRef]
- Pradhan, C.; Senapati, M.K.; Malla, S.G.; Nayak, P.K.; Gjengedal, T. Coordinated Power Management and Control of Standalone PV-Hybrid System with Modified IWO-Based MPPT. IEEE Syst. J. 2020, 15, 3585–3596. [Google Scholar] [CrossRef]
- Lin, A.; Sun, W.; Yu, H.; Wu, G.; Tang, H. Global Genetic Learning Particle Swarm Optimization with Diversity Enhancement by Ring Topology. Swarm Evol. Comput. 2018, 44, 571–583. [Google Scholar] [CrossRef]
- Xia, X.; Gui, L.; Zhan, Z.-H. A Multi-Swarm Particle Swarm Optimization Algorithm Based on Dynamical Topology and Purposeful Detecting. Appl. Soft Comput. 2018, 67, 126–140. [Google Scholar] [CrossRef]
- Erskine, A.; Joyce, T.; Herrmann, J.M. Stochastic Stability of Particle Swarm Optimisation. Swarm Intell. 2017, 11, 295–315. [Google Scholar] [CrossRef]
- Al-Bahrani, L.T.; Patra, J.C. Multi-Gradient PSO Algorithm for Optimization of Multimodal, Discontinuous and Non-Convex Fuel Cost Function of Thermal Generating Units under Various Power Constraints in Smart Power Grid. Energy 2018, 147, 1070–1091. [Google Scholar] [CrossRef]
- Huang, C.; Zhou, X.; Ran, X.; Liu, Y.; Deng, W.; Deng, W. Co-Evolutionary Competitive Swarm Optimizer with Three-Phase for Large-Scale Complex Optimization Problem. Inf. Sci. 2023, 619, 2–18. [Google Scholar] [CrossRef]
- Liu, H.; Wang, Y.; Tu, L.; Ding, G.; Hu, Y. A Modified Particle Swarm Optimization for Large-Scale Numerical Optimizations and Engineering Design Problems. J. Intell. Manuf. 2018, 30, 2407–2433. [Google Scholar] [CrossRef]
- Wang, H.; Liang, M.; Sun, C.; Zhang, G.; Xie, L. Multiple-Strategy Learning Particle Swarm Optimization for Large-Scale Optimization Problems. Complex. Intell. Syst. 2021, 7, 1–16. [Google Scholar] [CrossRef]
- Al-Bahrani, L.T.; Patra, J.C. A Novel Orthogonal PSO Algorithm Based on Orthogonal Diagonalization. Swarm Evol. Comput. 2018, 40, 1–23. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A Modified Particle Swarm Optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings. IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Evers, G.I.; Ghalia, M. Ben Regrouping Particle Swarm Optimization: A New Global Optimization Algorithm with Improved Performance Consistency across Benchmarks. In Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 3901–3908. [Google Scholar] [CrossRef]
- Li, F.; Yue, Q.; Liu, Y.; Ouyang, H.; Gu, F. A Fast Density Peak Clustering Based Particle Swarm Optimizer for Dynamic Optimization. Expert. Syst. Appl. 2024, 236, 121254. [Google Scholar] [CrossRef]
- Akan, Y.Y.; Herrmann, J.M. Stability, Entropy and Performance in PSO. In Proceedings of the GECCO 2023 Companion—Proceedings of the 2023 Genetic and Evolutionary Computation Conference Companion, Lisbon, Portugal, 15–19 July 2023; pp. 811–814. [Google Scholar] [CrossRef]
- Sun, L.; Yang, Y.; Wei, W. A Three-Stage Gene Selection Algorithm Based on Intrinsic Dimension and the Concise Particle Swarm Optimization. SSRN 2023. [CrossRef]
- Tsujimoto, T.; Shindo, T.; Jin’no, K. The Neighborhood of Canonical Deterministic PSO. In Proceedings of the Evolutionary Computation (CEC), New Orleans, LA, USA, 5–8 June 2011; pp. 1811–1817. [Google Scholar]
- Kennedy, J. Small Worlds and Mega-Minds: Effects of Neighborhood Topology on Particle Swarm Performance. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 3, pp. 1931–1938. [Google Scholar]
- Yang, X.; Li, H.; Huang, Y. An Adaptive Dynamic Multi-Swarm Particle Swarm Optimization with Stagnation Detection and Spatial Exclusion for Solving Continuous Optimization Problems. Eng. Appl. Artif. Intell. 2023, 123, 106215. [Google Scholar] [CrossRef]
- Jiang, J.J.; Wei, W.X.; Shao, W.L.; Liang, Y.F.; Qu, Y.Y. Research on Large-Scale Bi-Level Particle Swarm Optimization Algorithm. IEEE Access 2021, 9, 56364–56375. [Google Scholar] [CrossRef]
- Zhao, Q.; Li, C. Two-Stage Multi-Swarm Particle Swarm Optimizer for Unconstrained and Constrained Global Optimization. IEEE Access 2020, 8, 124905–124927. [Google Scholar] [CrossRef]
- Balavalikar, S.; Nayak, P.; Shenoy, N.; Nayak, K. Particle Swarm Optimization Based Artificial Neural Network Model for Forecasting Groundwater Level in Udupi District. Proc. AIP Conf. Proc. 2018, 1952, 20021. [Google Scholar]
- Yang, X.; Li, H. Evolutionary-State-Driven Multi-Swarm Cooperation Particle Swarm Optimization for Complex Optimization Problem. Inf. Sci. 2023, 646, 119302. [Google Scholar] [CrossRef]
- Nagra, A.A.; Han, F.; Ling, Q.H.; Mehta, S. An Improved Hybrid Method Combining Gravitational Search Algorithm with Dynamic Multi Swarm Particle Swarm Optimization. IEEE Access 2019, 7, 50388–50399. [Google Scholar] [CrossRef]
- Nagra, A.A.; Han, F.; Ling, Q.H. An Improved Hybrid Self-Inertia Weight Adaptive Particle Swarm Optimization Algorithm with Local Search. Eng. Optim. 2018, 51, 1115–1132. [Google Scholar] [CrossRef]
- Vakhnin, A.V.; Sopov, E.A.; Panfilov, I.A.; Polyakova, A.S.; Kustov, D.V. A Problem Decomposition Approach for Large-Scale Global Optimization Problems. IOP Conf. Ser. Mater. Sci. Eng. 2019, 537, 052031. [Google Scholar] [CrossRef]
- Liao, T.; Stutzle, T. Benchmark Results for a Simple Hybrid Algorithm on the CEC 2013 Benchmark Set for Real-Parameter Optimization. In Proceedings of the 2013 IEEE Congress on Evolutionary Computation, CEC 2013, Cancun, Mexico, 20–23 June 2013; pp. 1938–1944. [Google Scholar] [CrossRef]
- Qu, L.; Zheng, R.; Shi, Y. BSO-CMA-ES: Brain Storm Optimization Based Covariance Matrix Adaptation Evolution Strategy for Multimodal Optimization. In Communications in Computer and Information Science; Springer: Cham, Switzerland, 2021; Volume 1454, pp. 167–174. [Google Scholar] [CrossRef]
- Lan, R.; Zhang, L.; Tang, Z.; Liu, Z.; Luo, X. A Hierarchical Sorting Swarm Optimizer for Large-Scale Optimization. IEEE Access 2019, 7, 40625–40635. [Google Scholar] [CrossRef]
- Diep, Q.B.; Zelinka, I.; Das, S. Self-Organizing Migrating Algorithm Pareto. Mendel 2019, 25, 111–120. [Google Scholar] [CrossRef]
- Zhao, D.; Yi, J.; Liu, D. Particle Swarn Optimized Adaptive Dynamic Programming. In Proceedings of the Approximate Dynamic Programming and Reinforcement Learning, ADPRL 2007, Honolulu, HI, USA, 1–5 April 2007; pp. 32–37. [Google Scholar]
- Strang, G. Calculus. In Open Textbook Library; Wellesley-Cambridge Press: Wellesley, MA, USA, 1991; ISBN 9780961408824. [Google Scholar]
- Parsopoulos, K.E.; Vrahatis, M.N. Particle Swarm Optimization and Intelligence; IGI Global: Hershey, PA, USA, 2010. [Google Scholar] [CrossRef]
- Olorunda, O.; Engelbrecht, A.P. Measuring Exploration/Exploitation in Particle Swarms Using Swarm Diversity. In Proceedings of the Evolutionary Computation, 2008. CEC 2008. (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; pp. 1128–1134. [Google Scholar]
- Li, X.; Tang, K.; Omidvar, M.N.; Yang, Z.; Qin, K.; China, H. Benchmark Functions for the CEC 2013 Special Session and Competition on Large-Scale Global Optimization. Gene 2013, 7, 8. [Google Scholar]
- Molina, D.; Latorre, A. Toolkit for the Automatic Comparison of Optimizers: Comparing Large-Scale Global Optimizers Made Easy. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation, CEC 2018—Proceedings, Rio de Janeiro, Brazil, 8–13 July 2018. [Google Scholar] [CrossRef]
- Clerc, M. Particle Swarm Optimization; ISTE: London, UK, 2006; ISBN 9780470612163. [Google Scholar]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, WA, Australia, 27 November 1995–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Ferreira, S.L.C.; Caires, A.O.; Borges, T.d.S.; Lima, A.M.D.S.; Silva, L.O.B.; dos Santos, W.N.L. Robustness Evaluation in Analytical Methods Optimized Using Experimental Designs. Microchem. J. 2017, 131, 163–169. [Google Scholar] [CrossRef]
- Bonnini, S.; Chesneau, C.; Ghosh, I.; Fleming, K. On the Robustness and Sensitivity of Several Nonparametric Estimators via the Influence Curve Measure: A Brief Study. Mathematics 2022, 10, 3100. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Average Time per Iteration in Seconds | Mean | SD | Worst | Best | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Algorithms | DSRegPSO | GPSO | DSRegPSO | GPSO | DSRegPSO | GPSO | DSRegPSO | GPSO | DSRegPSO | GPSO |
| Algorithm | |||
|---|---|---|---|
| AMO | 0 | 0 | 0 |
| APO | 0 | 0 | 0 |
| AQO | 0 | 0 | 0 |
| BICCA | 0 | 1 | 1 |
| CC-CMA-ES | 0 | 1 | 1 |
| DECC-G | 6 | 0 | 0 |
| DEEPSO | 0 | 0 | 0 |
| DMO | 0 | 0 | 0 |
| DPO | 0 | 0 | 0 |
| DQO | 1 | 0 | 0 |
| DSRegPSO | 4 | 1 | 1 |
| IHDELS | 1 | 0 | 0 |
| MLSHADE-SPA | 0 | 4 | 4 |
| MOS | 1 | 0 | 0 |
| RO | 0 | 0 | 0 |
| SACC | 0 | 1 | 0 |
| SHADEILS | 2 | 8 | 8 |
| VMODE | 0 | 0 | 0 |
| Algorithm | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AMO | 0.00E+00 | 8.48E+02 | 0.00E+00 | 1.57E+08 | 6.69E+06 | 1.63E+05 | 2.07E+04 | 8.71E+12 | 4.09E+08 | 8.99E+05 | 5.16E+07 | 3.17E+02 | 3.14E+06 | 2.69E+07 | 2.44E+06 |
| APO | 0.00E+00 | 8.32E+02 | 0.00E+00 | 1.62E+08 | 7.01E+06 | 1.45E+05 | 3.31E+02 | 1.70E+13 | 3.96E+08 | 7.07E+05 | 2.54E+07 | 1.06E+02 | 7.88E+05 | 9.92E+06 | 2.08E+06 |
| AQO | 0.00E+00 | 8.39E+02 | 0.00E+00 | 1.61E+08 | 6.84E+06 | 1.79E+05 | 1.52E+04 | 7.31E+12 | 4.08E+08 | 9.46E+05 | 4.65E+07 | 1.91E+02 | 3.68E+06 | 2.69E+07 | 2.40E+06 |
| BICCA | 0.00E+00 | 8.46E−07 | 7.27E−01 | 8.85E+08 | 2.58E+06 | 1.46E+05 | 1.82E+05 | 3.78E+12 | 2.18E+08 | 1.24E+06 | 2.85E+07 | 1.40E+03 | 1.09E+07 | 4.27E+07 | 3.16E+06 |
| CC-CMA-ES | 5.80E−09 | 1.33E+03 | 0.00E+00 | 2.19E+09 | 7.28E+14 | 5.87E+05 | 7.44E+06 | 3.88E+14 | 3.71E+08 | 7.55E+05 | 1.58E+08 | 1.27E+03 | 6.69E+08 | 7.10E+07 | 3.03E+07 |
| DECC-G | 0.00E+00 | 1.03E+03 | 3.00E−10 | 2.12E+10 | 5.07E+06 | 6.08E+04 | 4.27E+08 | 3.88E+14 | 4.17E+08 | 1.19E+07 | 1.60E+11 | 1.07E+03 | 3.36E+10 | 6.27E+11 | 6.01E+07 |
| DEEPSO | 1.44E+08 | 1.49E+04 | 2.04E+01 | 4.77E+09 | 1.45E+07 | 1.02E+06 | 1.54E+07 | 5.42E+12 | 9.17E+08 | 9.07E+07 | 5.60E+08 | 1.54E+10 | 8.75E+08 | 4.33E+08 | 7.04E+06 |
| DMO | 0.00E+00 | 8.16E+02 | 0.00E+00 | 2.20E+08 | 7.12E+06 | 1.50E+05 | 5.26E+04 | 1.07E+13 | 5.28E+08 | 5.70E+05 | 1.16E+08 | 2.45E+02 | 6.55E+06 | 4.57E+07 | 3.02E+07 |
| DPO | 0.00E+00 | 1.05E+03 | 0.00E+00 | 2.71E+08 | 6.85E+06 | 1.38E+05 | 2.52E+04 | 2.33E+13 | 4.02E+08 | 1.08E+06 | 9.88E+07 | 3.45E+02 | 4.04E+06 | 2.86E+07 | 2.80E+06 |
| DQO | 0.00E+00 | 8.41E+02 | 0.00E+00 | 1.56E+08 | 7.06E+06 | 1.52E+05 | 2.06E+04 | 7.52E+12 | 4.10E+08 | 8.02E+05 | 5.43E+07 | 2.07E+02 | 3.21E+06 | 2.43E+07 | 2.38E+06 |
| DSRegPSO | 1.90E−04 | 6.87E+02 | 2.00E+01 | 1.24E+09 | 3.76E+06 | 9.96E+05 | 3.59E+04 | 1.06E+13 | 3.05E+08 | 9.17E+07 | 4.32E+08 | 1.56E+03 | 1.03E+07 | 1.92E+08 | 5.79E+05 |
| GPSO | 2.91E+09 | 4.19E+04 | 2.02E+01 | 2.75E+10 | 5.66E+06 | 1.01E+06 | 5.73E+08 | 1.32E+14 | 6.12E+08 | 9.07E+07 | 3.44E+09 | 1.53E+12 | 3.03E+09 | 7.87E+09 | 2.80E+10 |
| IHDELS | 4.34E−28 | 1.32E+03 | 2.01E+01 | 3.04E+08 | 9.59E+06 | 1.03E+06 | 3.46E+04 | 1.36E+12 | 6.74E+08 | 9.16E+07 | 1.07E+07 | 3.77E+02 | 3.80E+06 | 1.58E+07 | 2.81E+06 |
| MLSHADE-SPA | 1.94E−22 | 7.89E+01 | 0.00E+00 | 6.90E+08 | 1.80E+06 | 1.40E+03 | 5.31E+04 | 9.77E+12 | 1.61E+08 | 6.56E+02 | 4.04E+07 | 1.04E+02 | 7.21E+07 | 1.52E+07 | 2.76E+07 |
| MOS | 0.00E+00 | 8.32E+02 | 0.00E+00 | 1.74E+08 | 6.94E+06 | 1.48E+05 | 1.62E+04 | 8.00E+12 | 3.83E+08 | 9.02E+05 | 5.22E+07 | 2.47E+02 | 3.40E+06 | 2.56E+07 | 2.35E+06 |
| RO | 0.00E+00 | 8.09E+02 | 0.00E+00 | 2.25E+08 | 6.33E+06 | 1.29E+05 | 3.46E+04 | 8.43E+12 | 3.85E+08 | 6.14E+05 | 8.53E+07 | 4.81E+02 | 4.61E+06 | 3.44E+07 | 1.00E+07 |
| SACC | 0.00E+00 | 5.71E+02 | 1.21E+00 | 3.66E+10 | 6.95E+06 | 2.07E+05 | 1.58E+07 | 9.86E+14 | 5.77E+08 | 2.11E+07 | 5.30E+08 | 8.74E+02 | 1.51E+09 | 7.34E+09 | 1.88E+06 |
| SHADEILS | 2.69E−24 | 1.00E+03 | 2.01E+01 | 1.48E+08 | 1.39E+06 | 1.02E+06 | 7.41E+01 | 3.17E+11 | 1.64E+08 | 9.18E+07 | 5.11E+05 | 6.18E+01 | 1.00E+05 | 5.76E+06 | 6.25E+05 |
| VMODE | 8.51E−04 | 5.51E+03 | 3.41E−04 | 8.48E+09 | 7.28E+14 | 1.99E+05 | 3.44E+06 | 3.26E+13 | 7.51E+08 | 9.91E+06 | 1.58E+08 | 2.34E+03 | 2.43E+07 | 9.35E+07 | 1.11E+07 |
| Algorithm | AMO | APO | AQO | BICCA | CCCMA-ES | DECC-G | DEEPSO | DMO | DPO | DQO | DSRegPSO | GPSO | IHDELS | MLSHADE-SPA | MOS | RO | SACC | SHADEILS | VMODE | Accum. Error (%) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AMO | 1.0E+00 | 2.1E−01 | 9.0E−01 | 8.9E−01 | 8.4E−03 | 3.4E−03 | 8.4E−03 | 2.0E−02 | 2.4E−02 | 4.5E−01 | 8.3E−02 | 4.3E−04 | 1.9E−01 | 9.3E−01 | 6.2E−01 | 6.6E−01 | 5.7E−03 | 4.8E−02 | 6.1E−05 | 6.0E+01 |
| APO | 2.1E−01 | 1.0E+00 | 1.7E−01 | 3.3E−01 | 2.0E−03 | 3.4E−03 | 8.4E−03 | 7.9E−02 | 8.4E−03 | 9.0E−02 | 3.9E−01 | 4.3E−04 | 5.5E−02 | 9.3E−01 | 2.1E−01 | 6.2E−01 | 1.2E−02 | 6.4E−02 | 6.1E−05 | 6.0E+01 |
| AQO | 9.0E−01 | 1.7E−01 | 1.0E+00 | 8.9E−01 | 8.4E−03 | 3.4E−03 | 8.4E−03 | 1.4E−02 | 2.8E−02 | 9.0E−01 | 8.3E−02 | 4.3E−04 | 1.9E−01 | 9.3E−01 | 1.0E+00 | 1.9E−01 | 5.7E−03 | 5.5E−02 | 6.1E−05 | 6.0E+01 |
| BICCA | 8.9E−01 | 3.3E−01 | 8.9E−01 | 1.0E+00 | 3.4E−03 | 3.4E−03 | 6.1E−05 | 3.6E−01 | 6.8E−01 | 8.9E−01 | 2.2E−02 | 6.1E−05 | 4.5E−01 | 6.0E−01 | 8.9E−01 | 9.8E−01 | 2.6E−03 | 4.1E−02 | 1.8E−04 | 6.0E+01 |
| CCCMA-ES | 8.4E−03 | 2.0E−03 | 8.4E−03 | 3.4E−03 | 1.0E+00 | 1.3E−01 | 1.5E−01 | 4.3E−03 | 8.4E−03 | 8.4E−03 | 3.0E−01 | 8.3E−02 | 7.3E−02 | 6.1E−05 | 6.7E−03 | 2.0E−03 | 1.9E−01 | 1.0E−02 | 8.9E−01 | 6.0E+01 |
| DECC-G | 3.4E−03 | 3.4E−03 | 3.4E−03 | 3.4E−03 | 1.3E−01 | 1.0E+00 | 3.3E−01 | 2.2E−02 | 6.7E−03 | 3.4E−03 | 2.2E−02 | 6.4E−01 | 1.4E−01 | 6.1E−05 | 3.4E−03 | 3.4E−03 | 8.0E−01 | 8.4E−03 | 2.3E−01 | 6.0E+01 |
| DEEPSO | 8.4E−03 | 8.4E−03 | 8.4E−03 | 6.1E−05 | 1.5E−01 | 3.3E−01 | 1.0E+00 | 2.6E−02 | 8.4E−03 | 8.4E−03 | 1.8E−02 | 1.2E−02 | 8.5E−04 | 2.6E−02 | 8.4E−03 | 1.8E−02 | 8.0E−01 | 8.5E−04 | 4.2E−01 | 6.0E+01 |
| DMO | 2.0E−02 | 7.9E−02 | 1.4E−02 | 3.6E−01 | 4.3E−03 | 2.2E−02 | 2.6E−02 | 1.0E+00 | 4.1E−01 | 1.7E−02 | 6.4E−01 | 4.3E−04 | 1.0E+00 | 9.5E−02 | 1.4E−02 | 3.8E−02 | 2.0E−02 | 4.8E−02 | 2.0E−03 | 6.0E+01 |
| DPO | 2.4E−02 | 8.4E−03 | 2.8E−02 | 6.8E−01 | 8.4E−03 | 6.7E−03 | 8.4E−03 | 4.1E−01 | 1.0E+00 | 6.0E−02 | 3.9E−01 | 4.3E−04 | 3.9E−01 | 3.3E−01 | 1.0E−02 | 2.6E−01 | 5.7E−03 | 2.2E−02 | 6.1E−05 | 6.0E+01 |
| DQO | 4.5E−01 | 9.0E−02 | 9.0E−01 | 8.9E−01 | 8.4E−03 | 3.4E−03 | 8.4E−03 | 1.7E−02 | 6.0E−02 | 1.0E+00 | 8.3E−02 | 4.3E−04 | 1.9E−01 | 9.3E−01 | 8.5E−01 | 1.9E−01 | 1.4E−02 | 5.5E−02 | 6.1E−05 | 6.0E+01 |
| DSRegPSO | 8.3E−02 | 3.9E−01 | 8.3E−02 | 2.2E−02 | 3.0E−01 | 2.2E−02 | 1.8E−02 | 6.4E−01 | 3.9E−01 | 8.3E−02 | 1.0E+00 | 4.3E−04 | 2.8E−01 | 3.0E−02 | 7.3E−02 | 8.3E−02 | 4.1E−02 | 4.8E−02 | 2.1E−01 | 6.0E+01 |
| GPSO | 4.3E−04 | 4.3E−04 | 4.3E−04 | 6.1E−05 | 8.3E−02 | 6.4E−01 | 1.2E−02 | 4.3E−04 | 4.3E−04 | 4.3E−04 | 4.3E−04 | 1.0E+00 | 1.2E−02 | 6.1E−05 | 4.3E−04 | 3.1E−04 | 1.1E−01 | 8.5E−04 | 2.2E−02 | 6.0E+01 |
| IHDELS | 1.9E−01 | 5.5E−02 | 1.9E−01 | 4.5E−01 | 7.3E−02 | 1.4E−01 | 8.5E−04 | 1.0E+00 | 3.9E−01 | 1.9E−01 | 2.8E−01 | 1.2E−02 | 1.0E+00 | 8.5E−01 | 1.9E−01 | 8.9E−01 | 3.9E−01 | 1.5E−03 | 1.5E−02 | 6.0E+01 |
| MLSHADE-SPA | 9.3E−01 | 9.3E−01 | 9.3E−01 | 6.0E−01 | 6.1E−05 | 6.1E−05 | 2.6E−02 | 9.5E−02 | 3.3E−01 | 9.3E−01 | 3.0E−02 | 6.1E−05 | 8.5E−01 | 1.0E+00 | 9.3E−01 | 8.5E−01 | 2.6E−03 | 1.5E−01 | 1.2E−02 | 6.0E+01 |
| MOS | 6.2E−01 | 2.1E−01 | 1.0E+00 | 8.9E−01 | 6.7E−03 | 3.4E−03 | 8.4E−03 | 1.4E−02 | 1.0E−02 | 8.5E−01 | 7.3E−02 | 4.3E−04 | 1.9E−01 | 9.3E─01 | 1.0E+00 | 5.2E−02 | 5.7E−03 | 4.8E−02 | 6.1E−05 | 6.0E+01 |
| RO | 6.6E−01 | 6.2E−01 | 1.9E−01 | 9.8E−01 | 2.0E−03 | 3.4E−03 | 1.8E−02 | 3.8E−02 | 2.6E−01 | 1.9E−01 | 8.3E−02 | 3.1E−04 | 8.9E−01 | 8.5E−01 | 5.2E−02 | 1.0E+00 | 5.7E−03 | 4.8E−02 | 6.1E−05 | 6.0E+01 |
| SACC | 5.7E−03 | 1.2E−02 | 5.7E−03 | 2.6E−03 | 1.9E−01 | 8.0E−01 | 8.0E−01 | 2.0E−02 | 5.7E−03 | 1.4E−02 | 4.1E−02 | 1.1E−01 | 3.9E−01 | 2.6E−03 | 5.7E−03 | 5.7E−03 | 1.0E+00 | 2.2E−02 | 2.1E−01 | 6.0E+01 |
| SHADEILS | 4.8E−02 | 6.4E−02 | 5.5E−02 | 4.1E−02 | 1.0E−02 | 8.4E−03 | 8.5E−04 | 4.8E−02 | 2.2E−02 | 5.5E−02 | 4.8E−02 | 8.5E−04 | 1.5E−03 | 1.5E−01 | 4.8E−02 | 4.8E−02 | 2.2E−02 | 1.0E+00 | 1.0E−02 | 6.0E+01 |
| VMODE | 6.1E−05 | 6.1E−05 | 6.1E−05 | 1.8E−04 | 8.9E−01 | 2.3E−01 | 4.2E−01 | 2.0E−03 | 6.1E−05 | 6.1E−05 | 2.1E−01 | 2.2E−02 | 1.5E−02 | 1.2E−02 | 6.1E−05 | 6.1E−05 | 2.1E−01 | 1.0E−02 | 1.0E+00 | 6.0E+01 |
| Algorithm | DEEPSO | DSRegPSO | GPSO | Accum. Error (%) |
|---|---|---|---|---|
| DEEPSO | 1.0E+00 | 1.8E−02 | 1.2E−02 | 9.8E+00 |
| DSRegPSO | 1.8E−02 | 1.0E+00 | 4.3E−04 | 9.8E+00 |
| GPSO | 1.2E−02 | 4.3E−04 | 1.0E+00 | 9.8E+00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rivera, M.M.; Guerrero-Mendez, C.; Lopez-Betancur, D.; Saucedo-Anaya, T. Dynamical Sphere Regrouping Particle Swarm Optimization: A Proposed Algorithm for Dealing with PSO Premature Convergence in Large-Scale Global Optimization. Mathematics 2023, 11, 4339. https://doi.org/10.3390/math11204339
Rivera MM, Guerrero-Mendez C, Lopez-Betancur D, Saucedo-Anaya T. Dynamical Sphere Regrouping Particle Swarm Optimization: A Proposed Algorithm for Dealing with PSO Premature Convergence in Large-Scale Global Optimization. Mathematics. 2023; 11(20):4339. https://doi.org/10.3390/math11204339
Chicago/Turabian StyleRivera, Martín Montes, Carlos Guerrero-Mendez, Daniela Lopez-Betancur, and Tonatiuh Saucedo-Anaya. 2023. "Dynamical Sphere Regrouping Particle Swarm Optimization: A Proposed Algorithm for Dealing with PSO Premature Convergence in Large-Scale Global Optimization" Mathematics 11, no. 20: 4339. https://doi.org/10.3390/math11204339
APA StyleRivera, M. M., Guerrero-Mendez, C., Lopez-Betancur, D., & Saucedo-Anaya, T. (2023). Dynamical Sphere Regrouping Particle Swarm Optimization: A Proposed Algorithm for Dealing with PSO Premature Convergence in Large-Scale Global Optimization. Mathematics, 11(20), 4339. https://doi.org/10.3390/math11204339