
Incipient Fault Detection and Reconstruction Using an Adaptive Sliding-Mode Observer for the Actuators of Fixed-Wing Aircraft



Abstract
:1. Introduction
2. Problem Formulation
3. Adaptive Robust Fault Detection and Reconstruction Method
3.1. Actuator Fault Detection
3.1.1. SMO Design
3.1.2. Stability Analysis
3.1.3. Reachability Condition Analysis
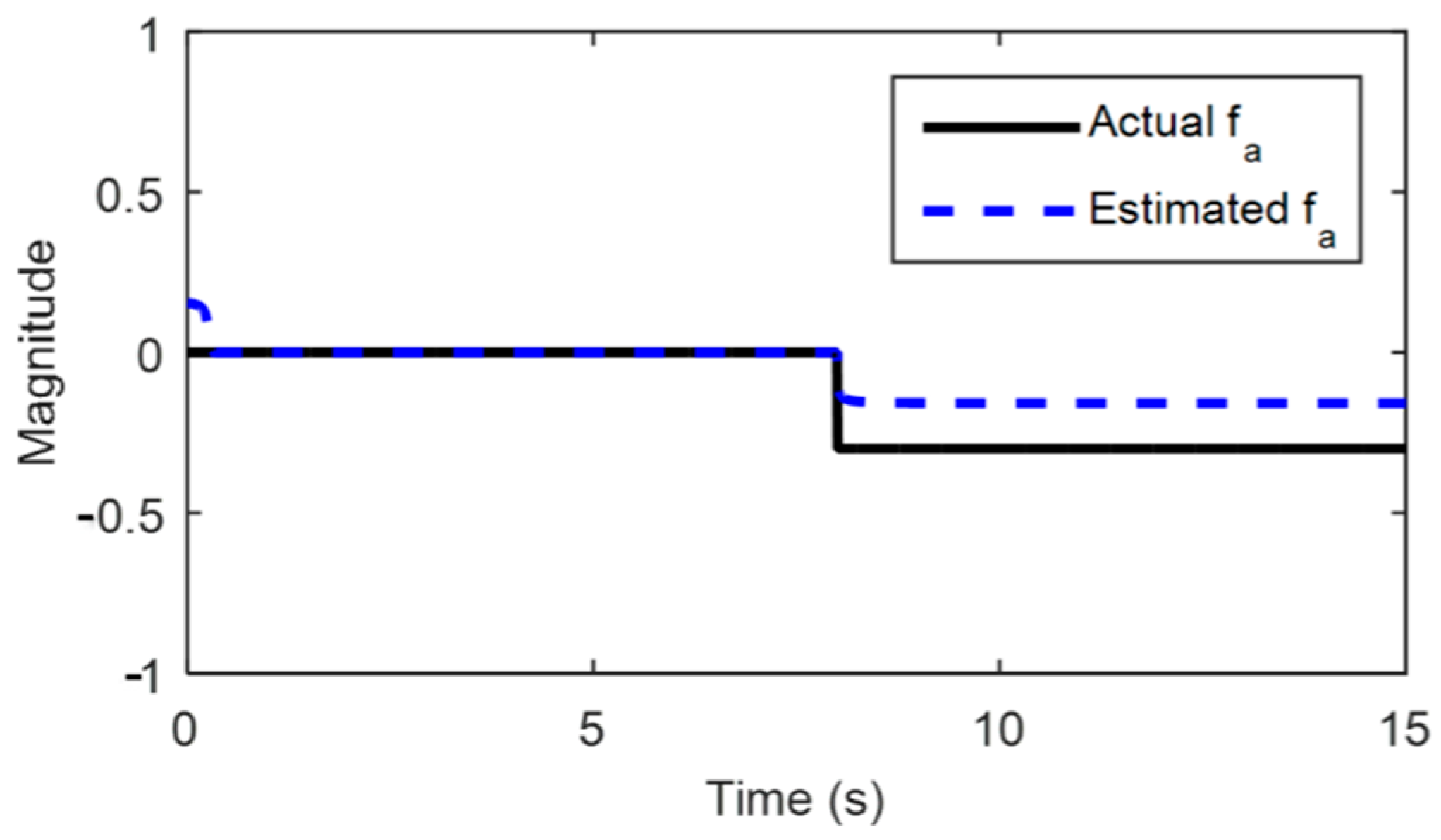
3.2. Actuator Fault Reconstruction
3.2.1. SMO Design
3.2.2. Stability Analysis
3.2.3. Reachability Condition Analysis
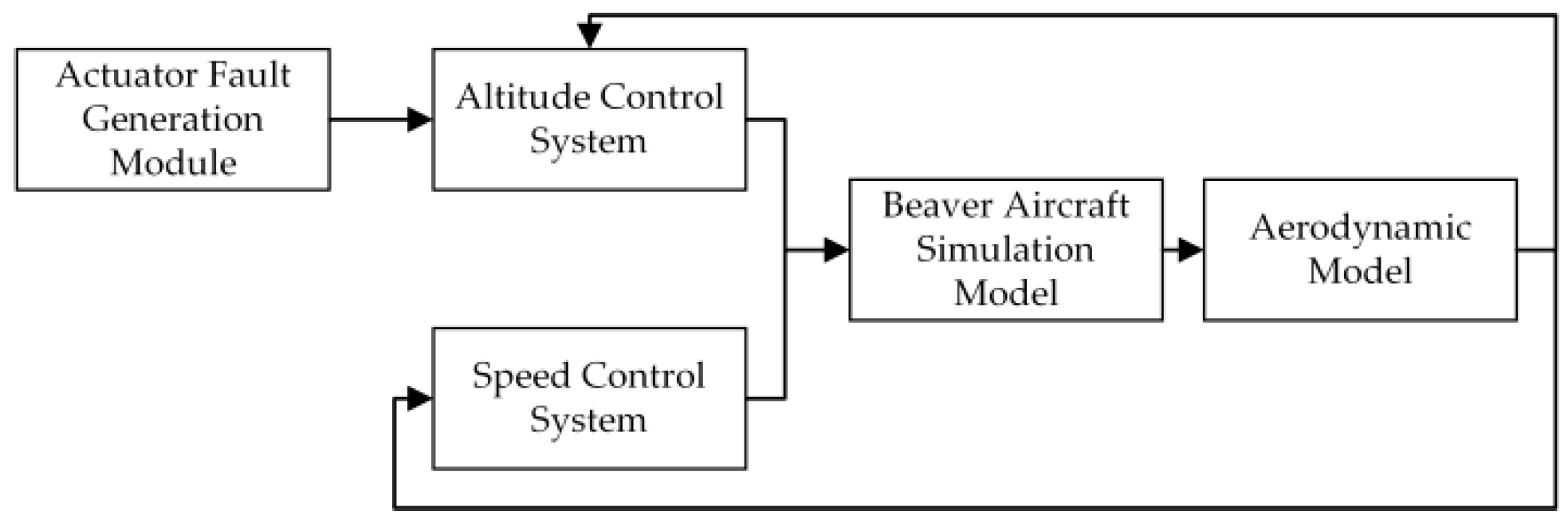
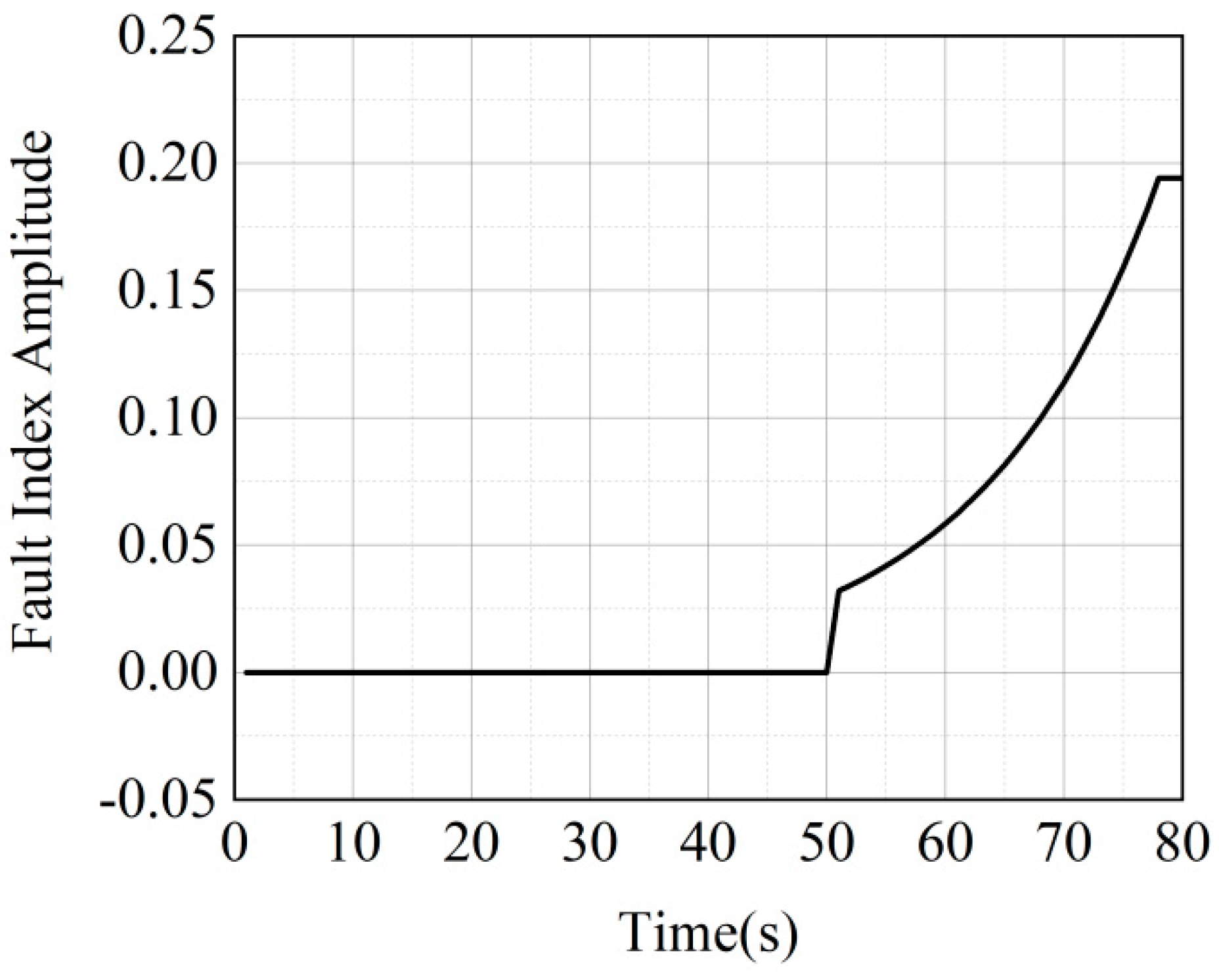
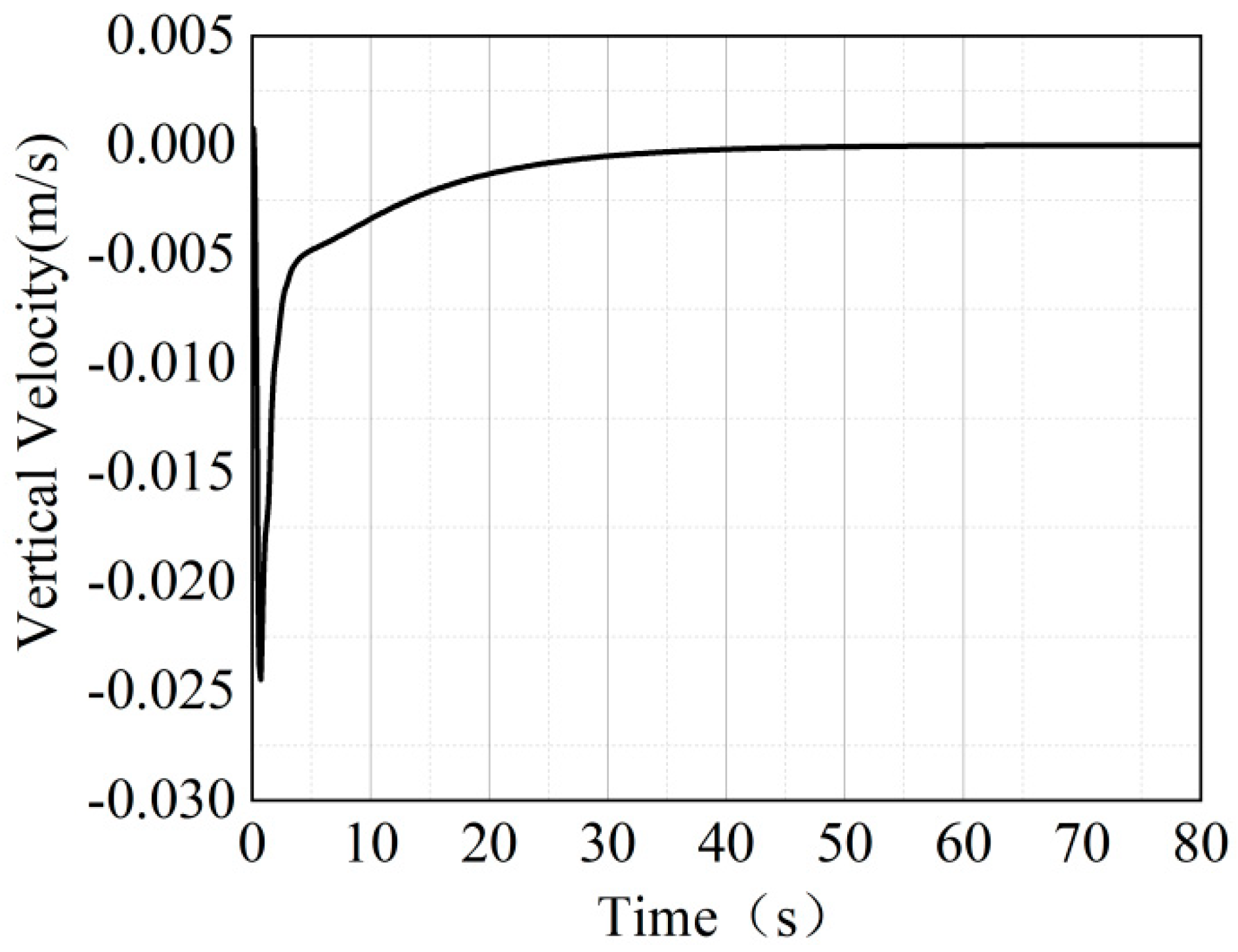
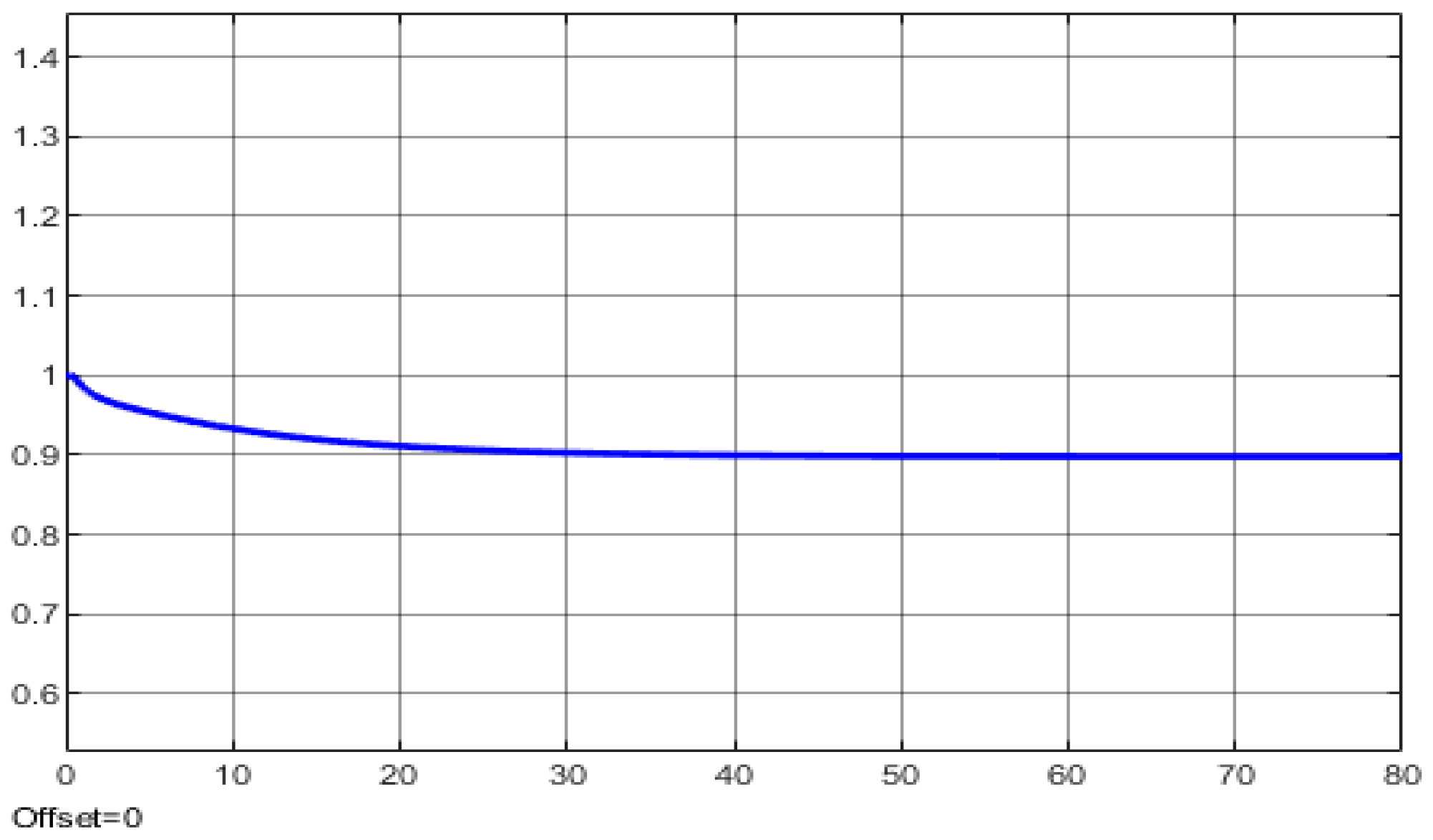
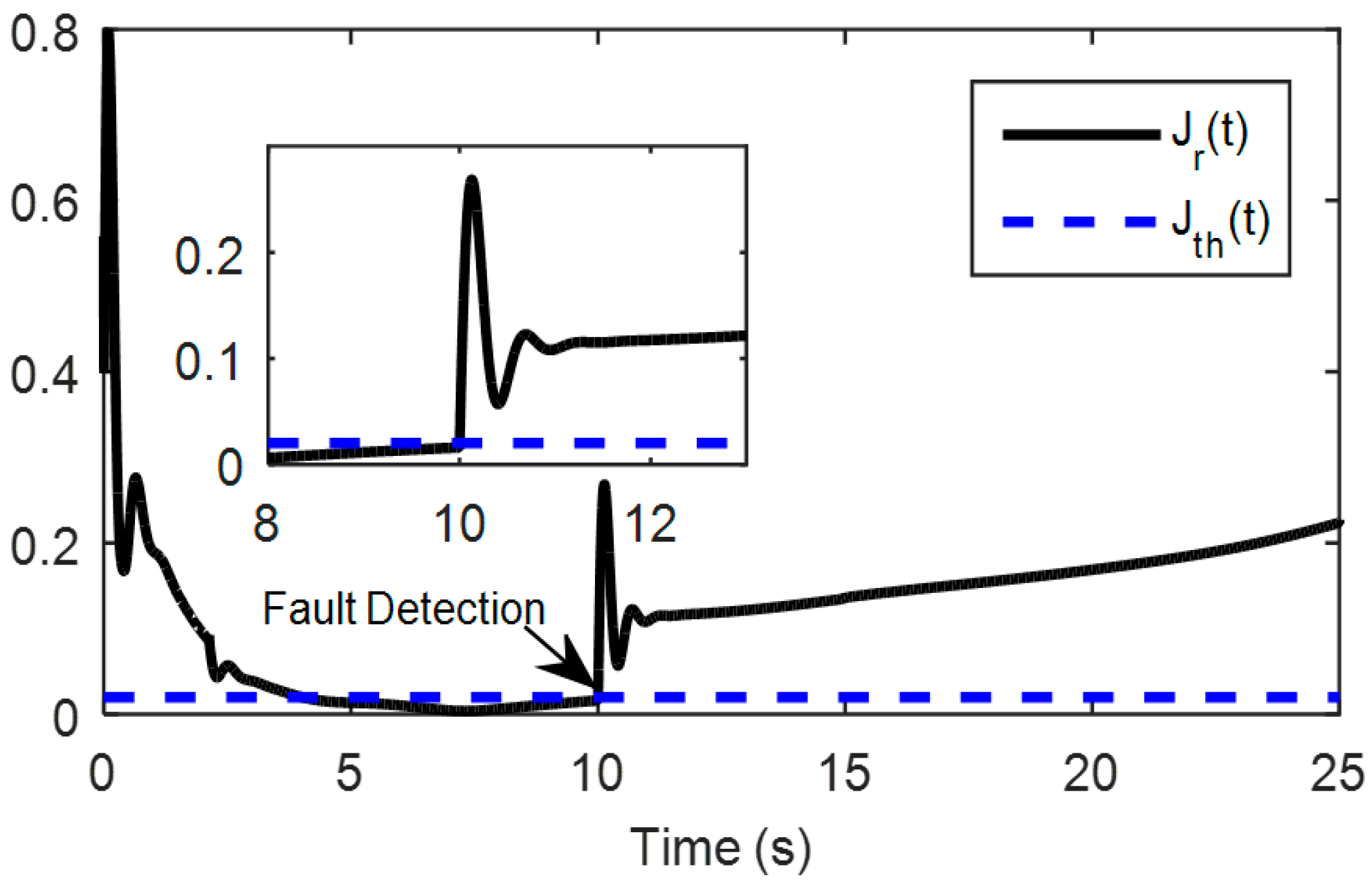
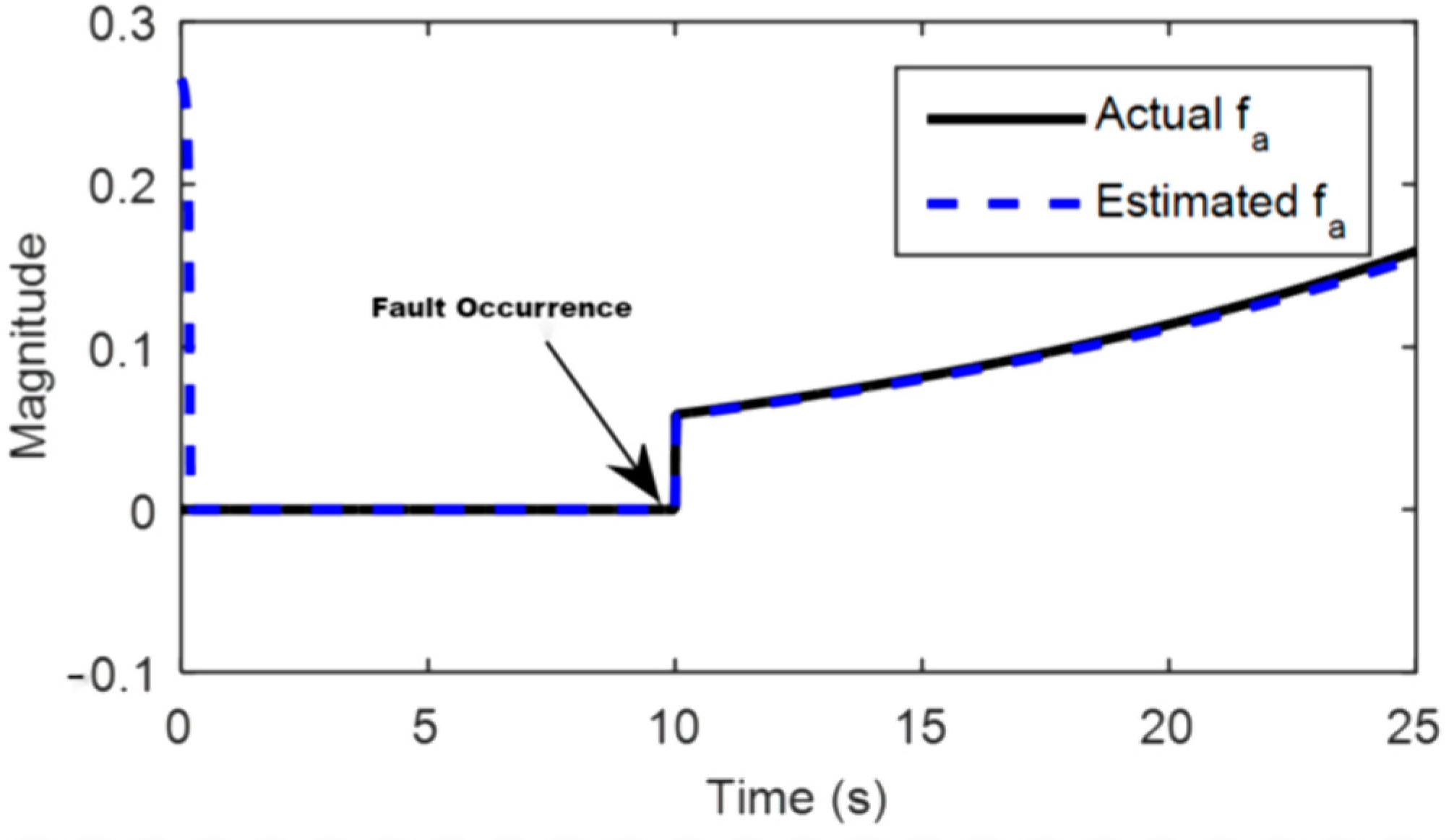
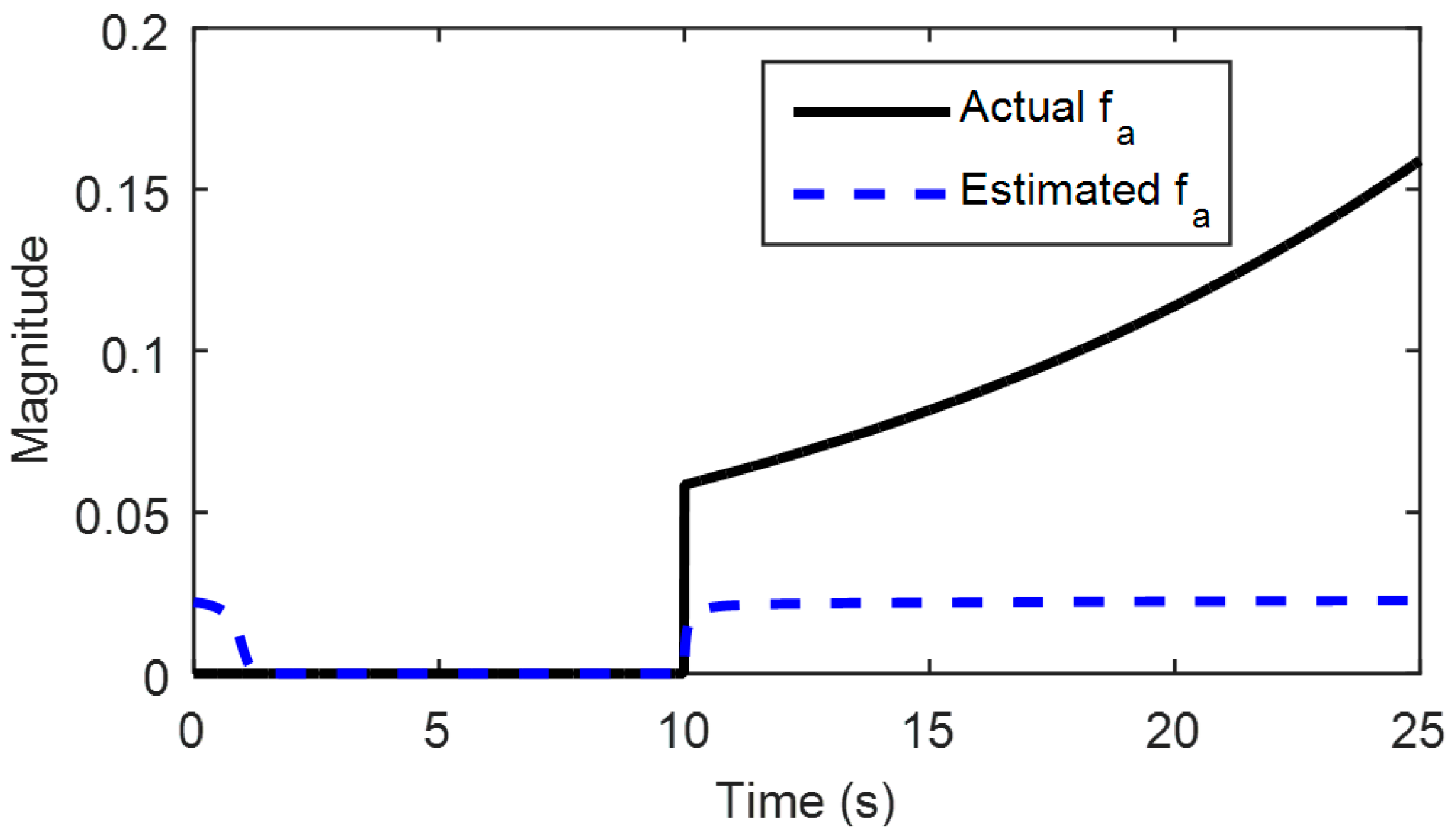
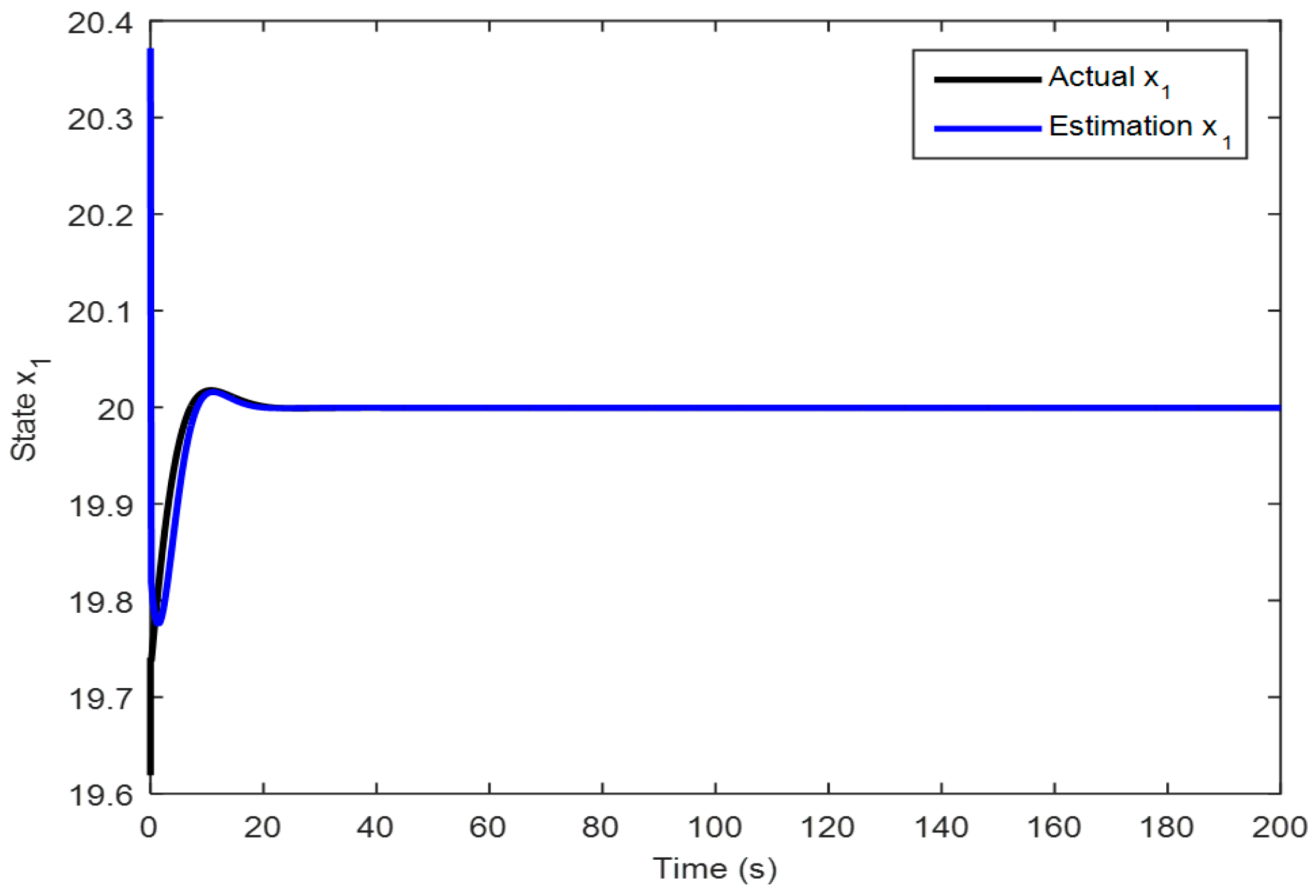
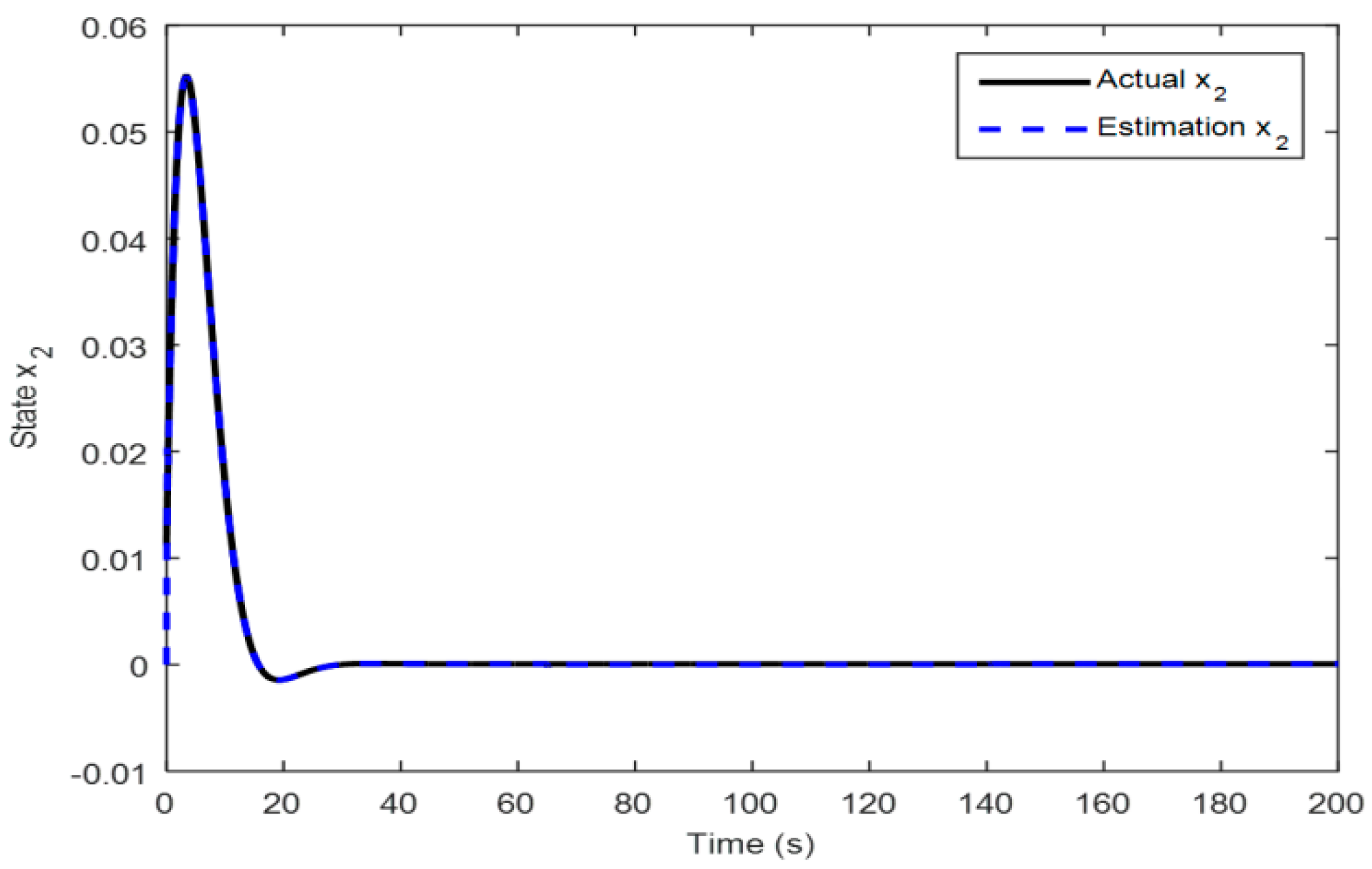
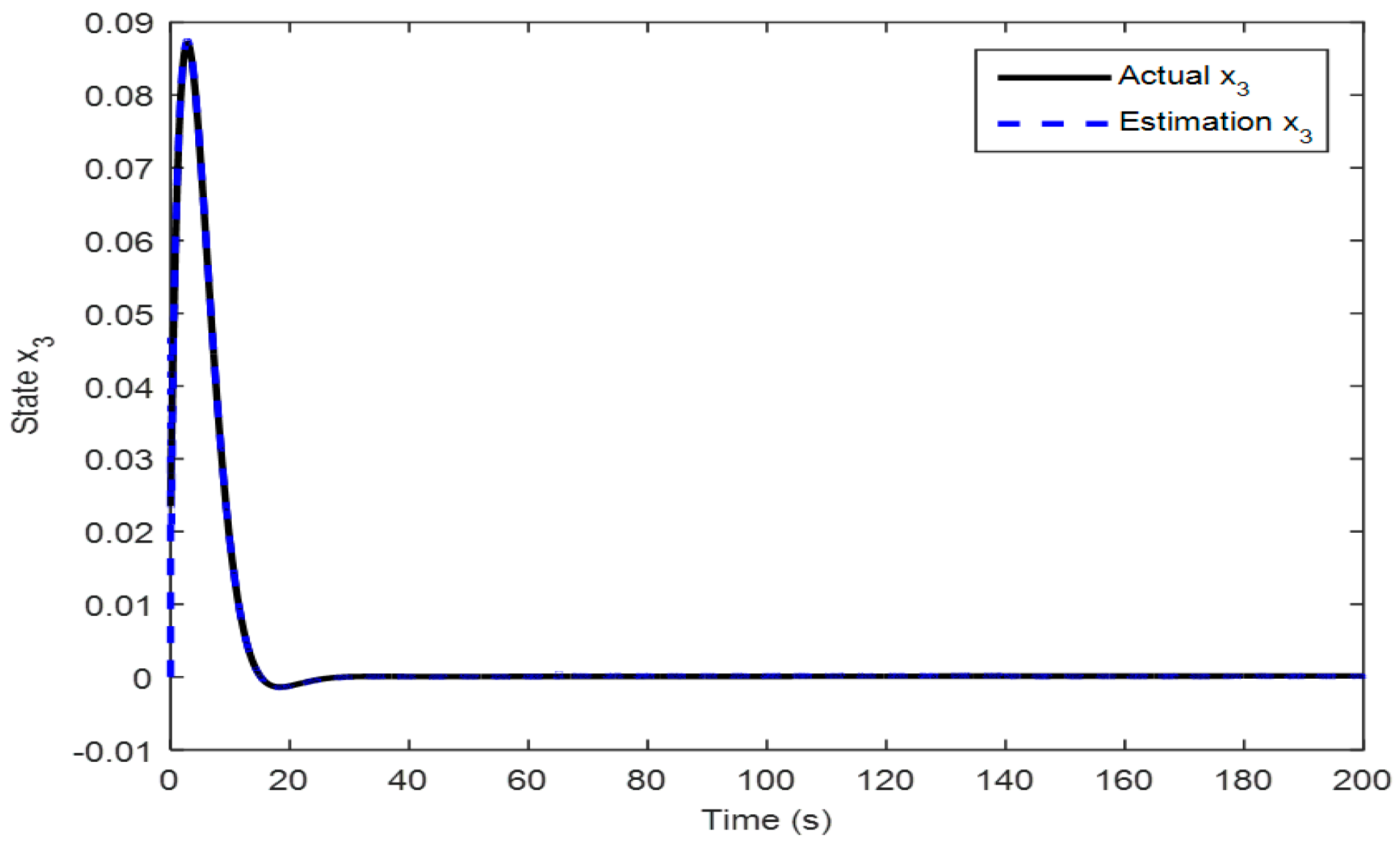
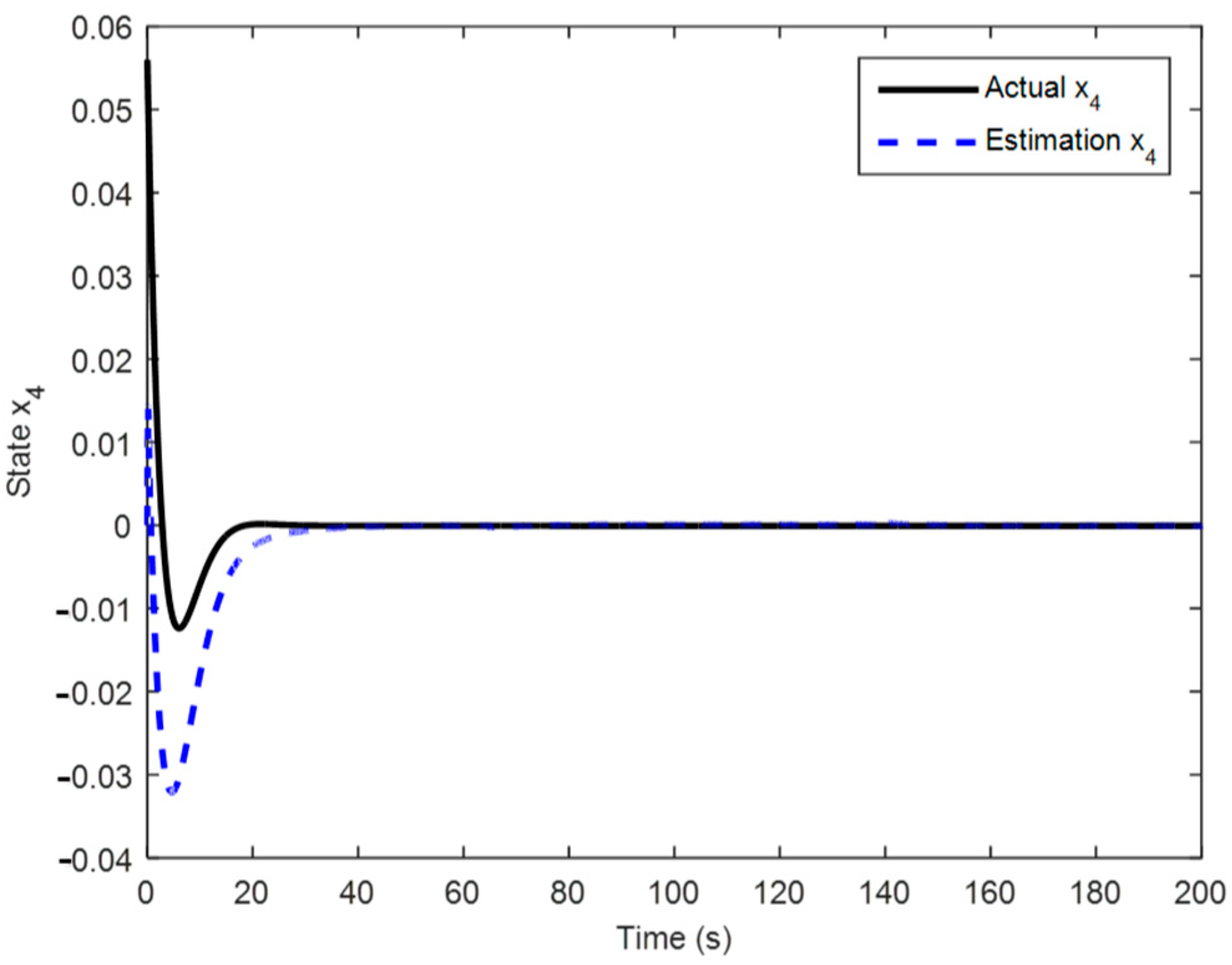
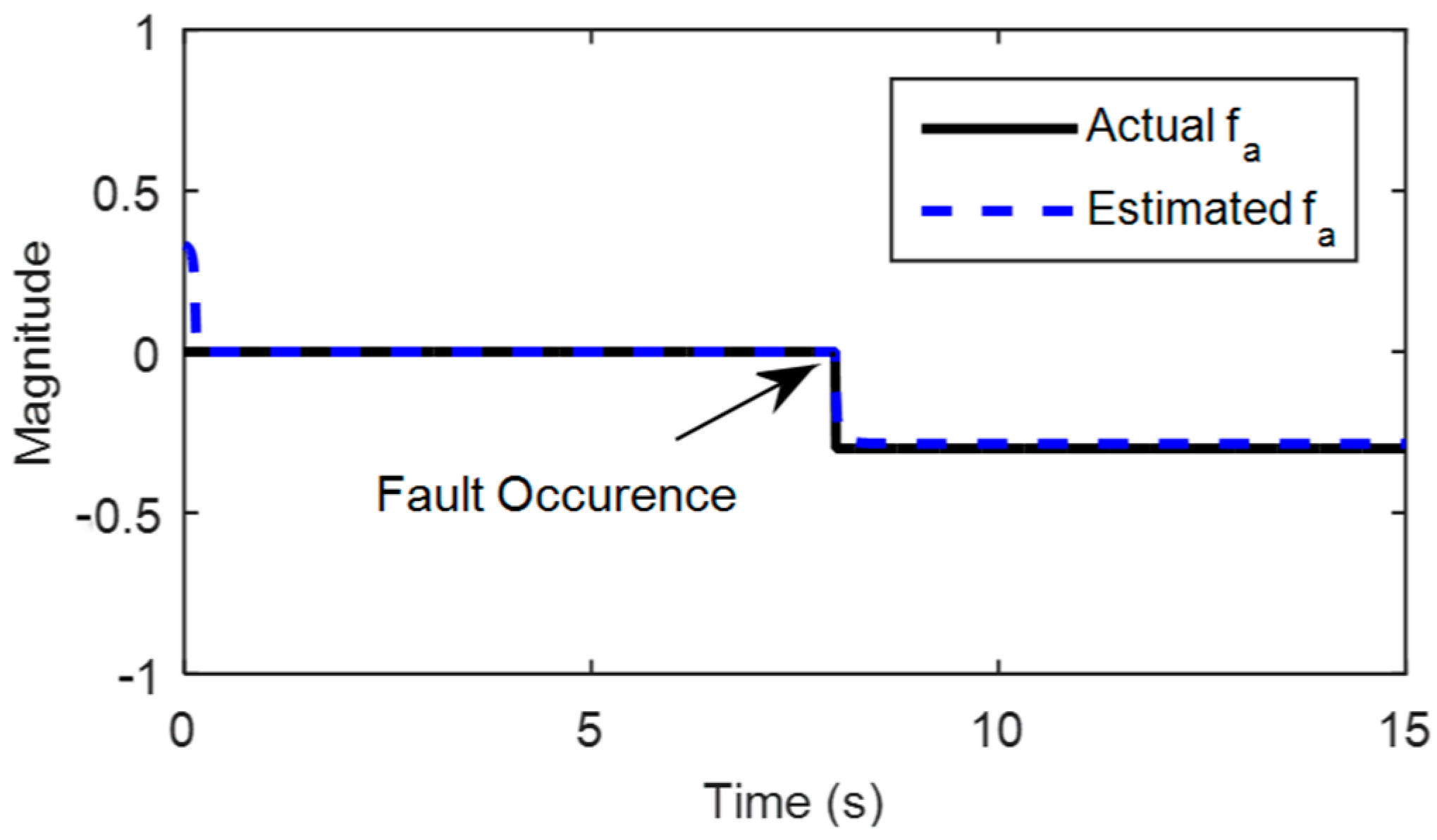
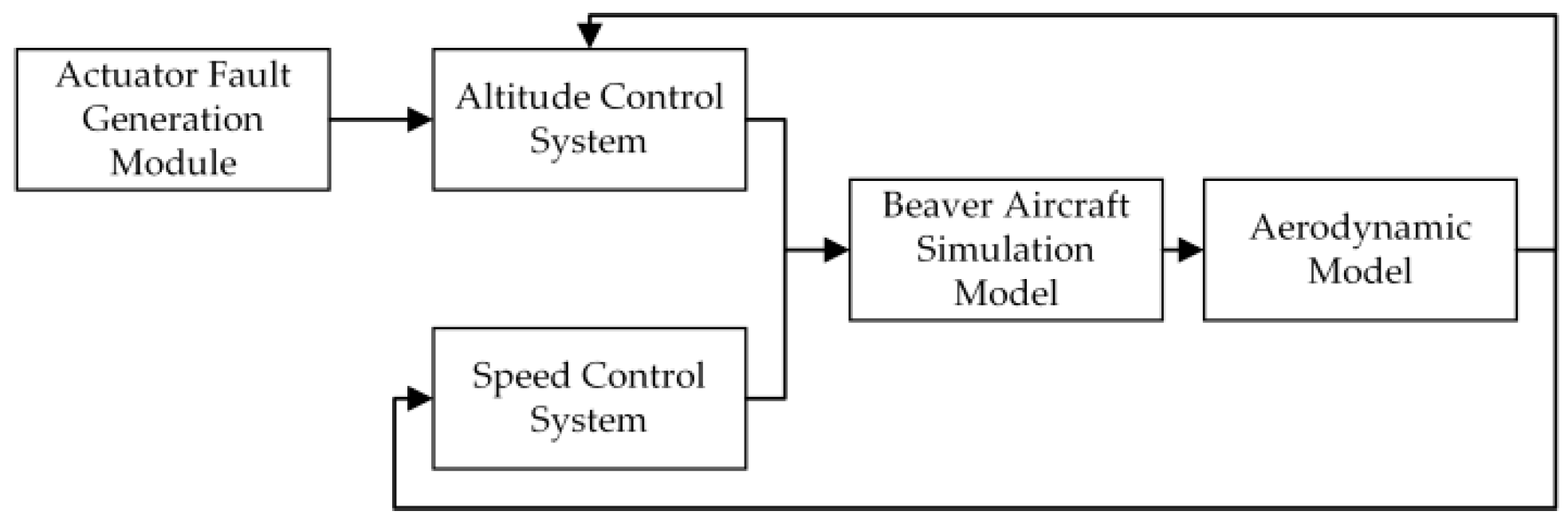
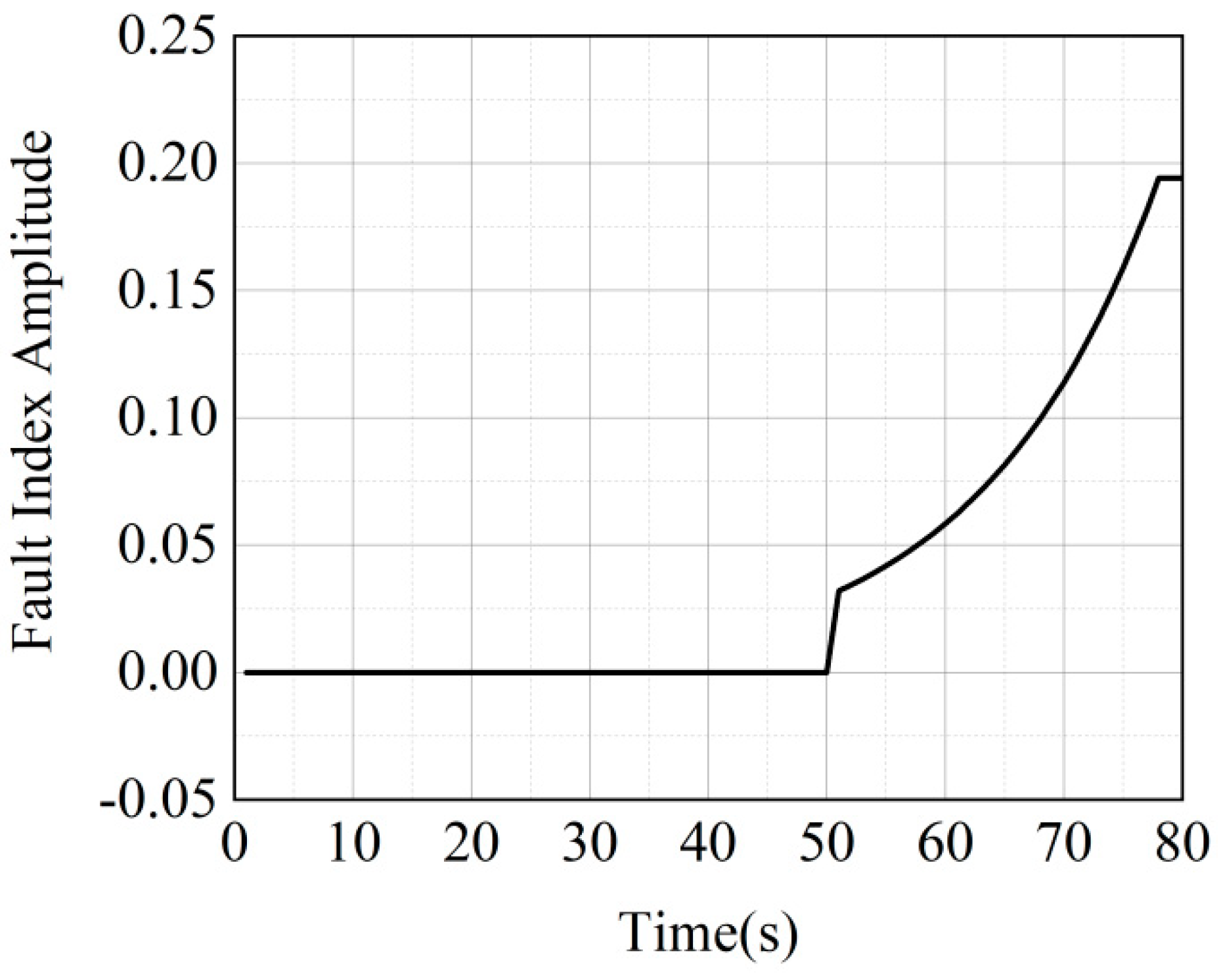
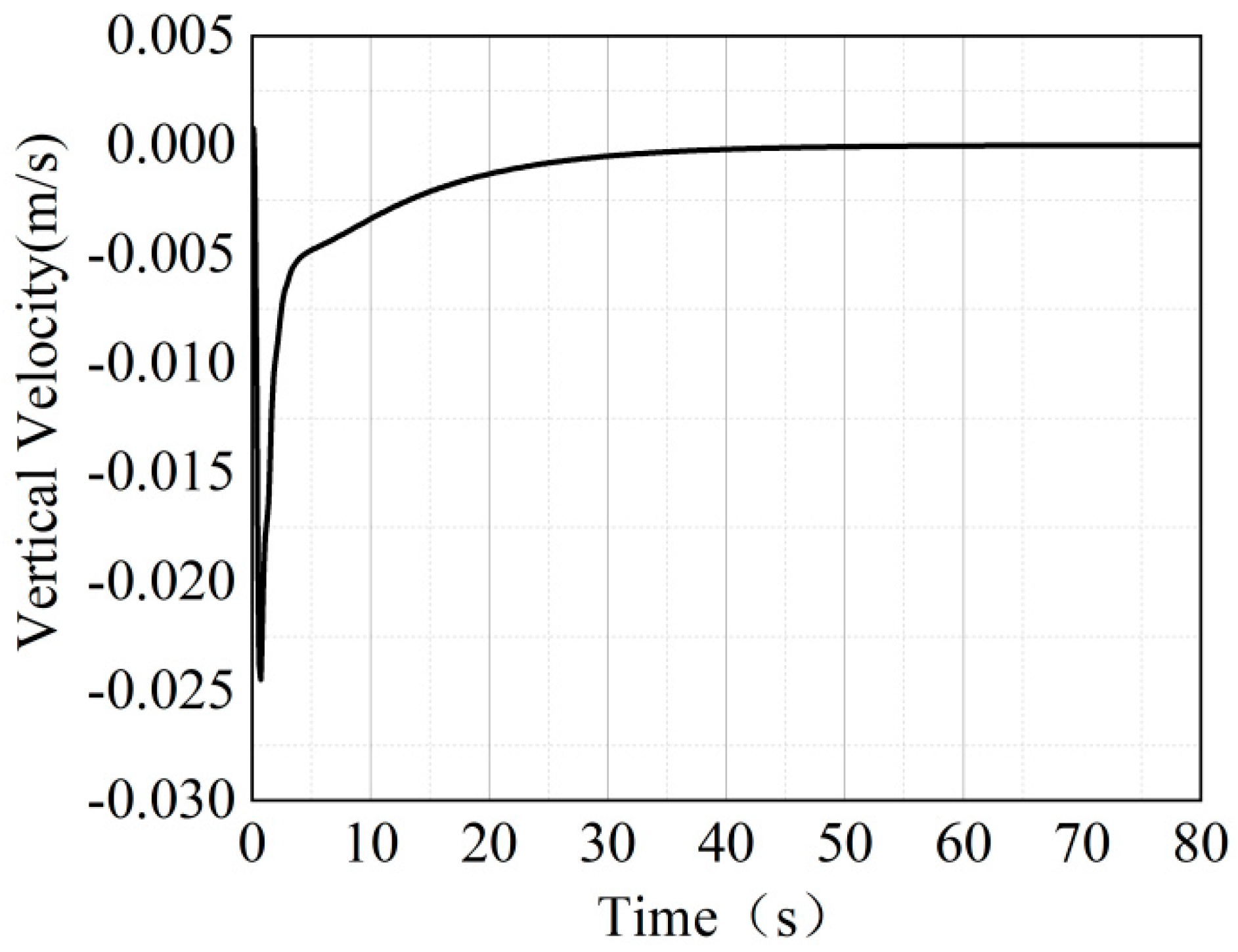
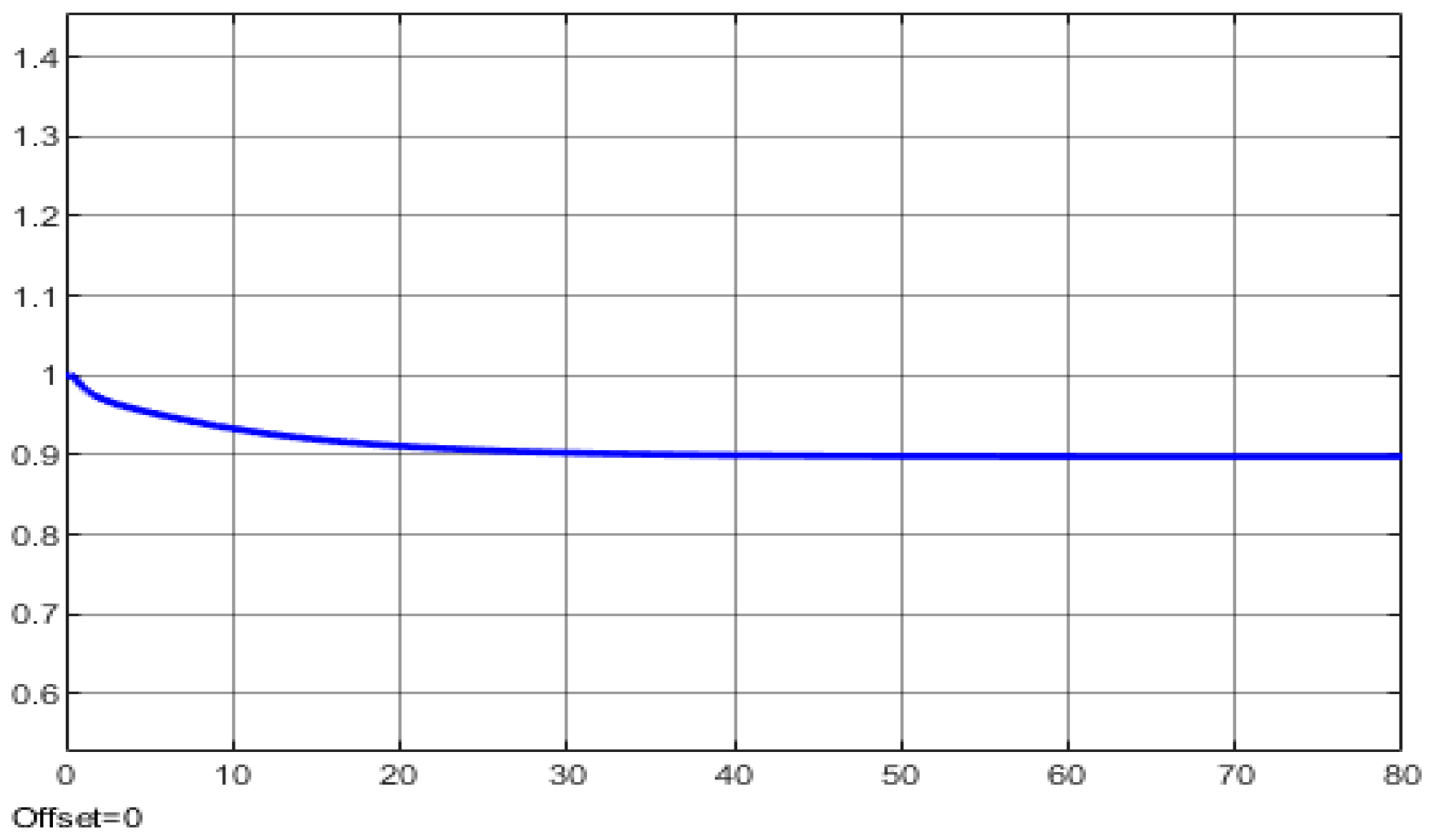
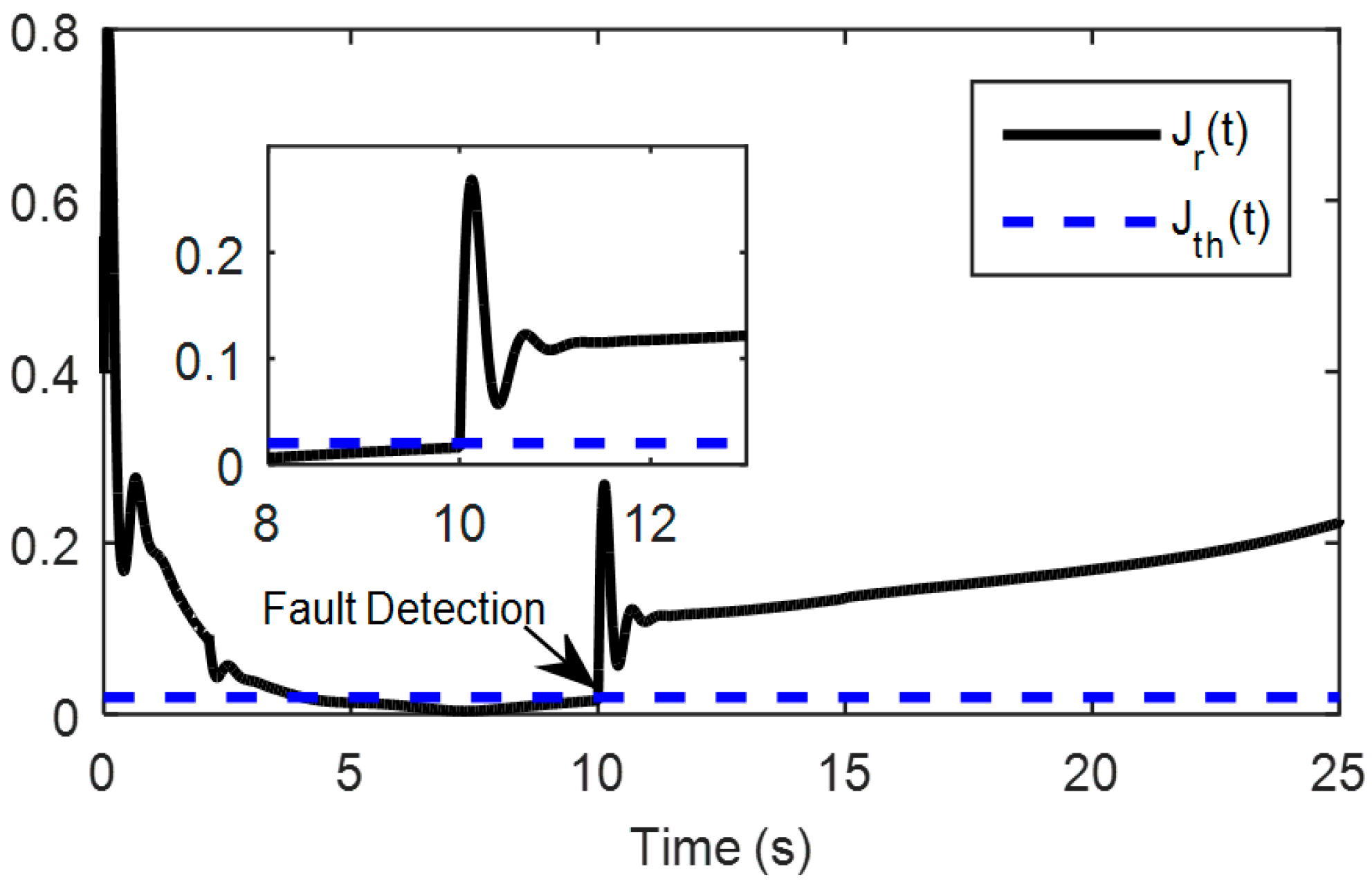
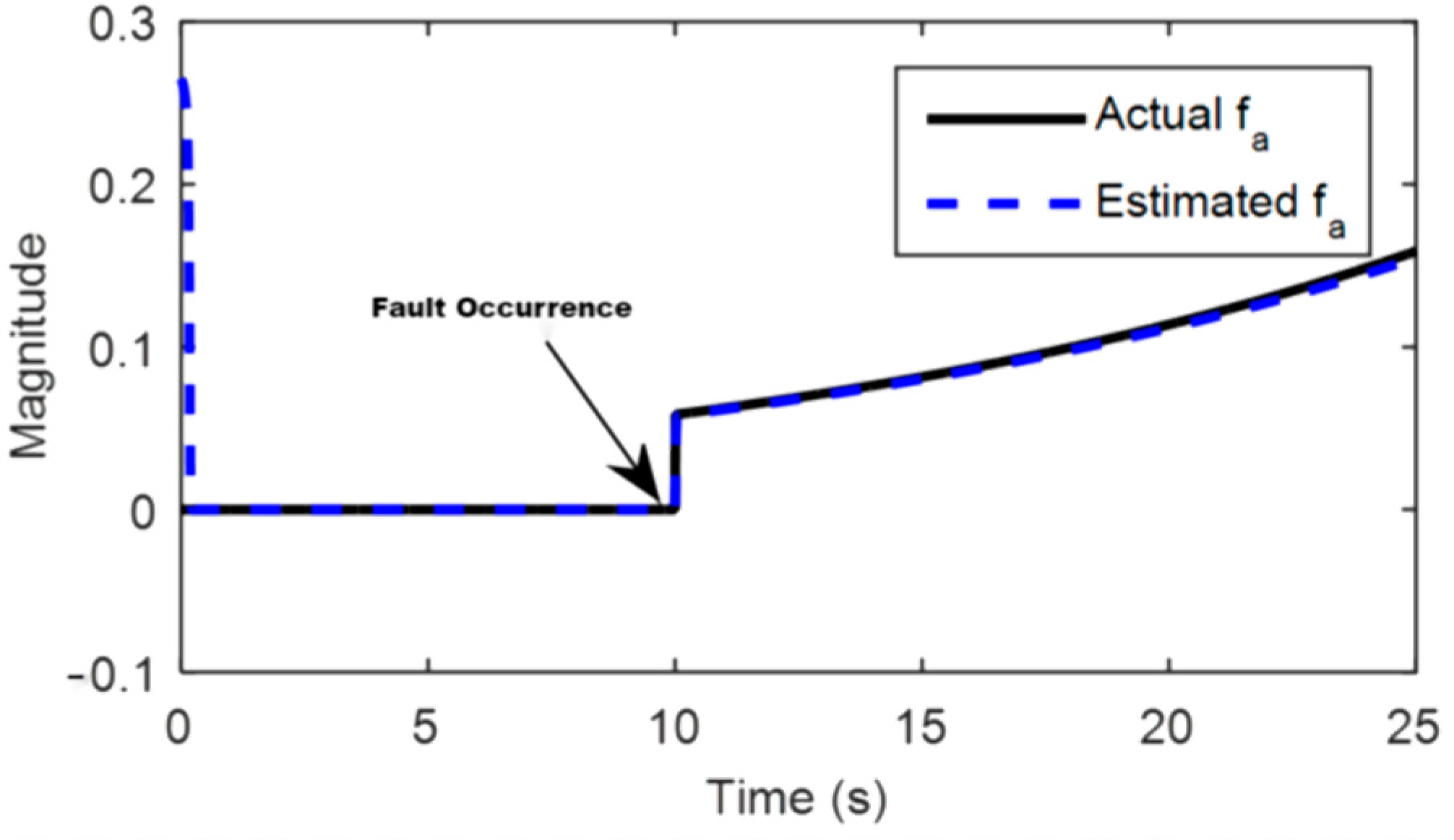
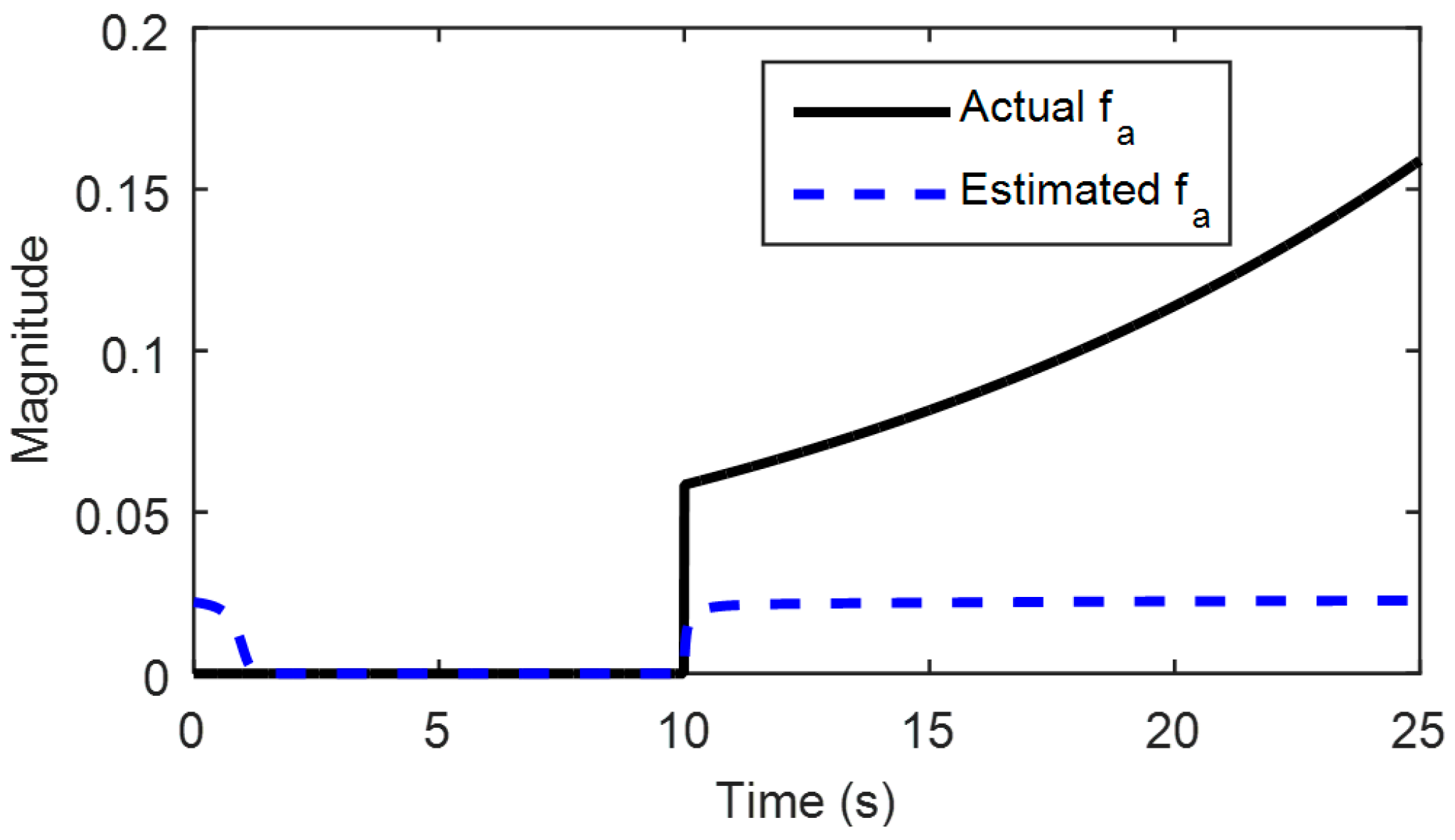
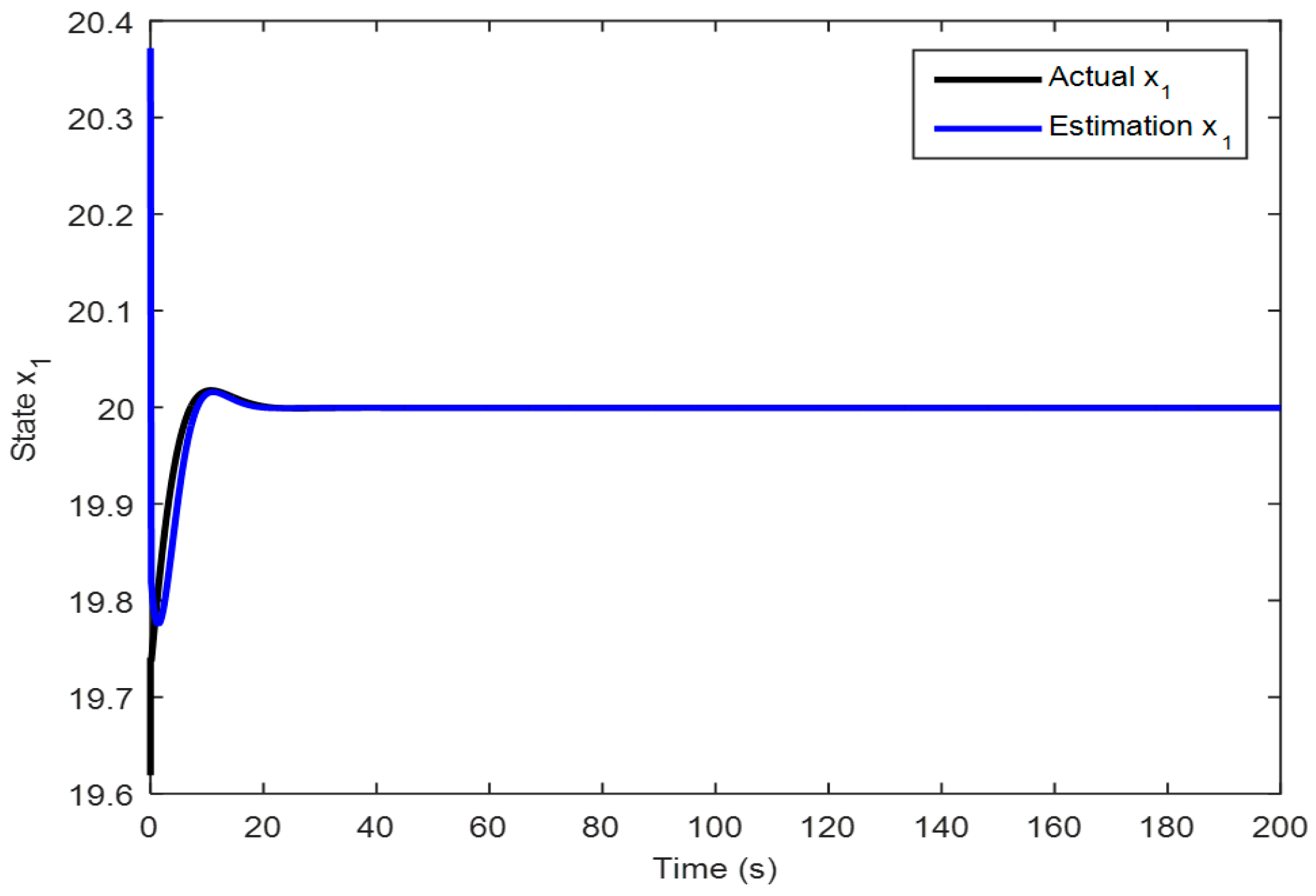
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning | Units |
|---|---|---|
| Sideslip angle | rad | |
| Roll rate | rad s−1 | |
| Yaw rate | rad s−1 | |
| Back angle | rad | |
| Yaw angle | rad | |
| Pitch angle | rad | |
| True airspeed | m s−1 | |
| Attack angle | rad | |
| Pitch rate | rad s−1 | |
| Deflection of ailerons | rad | |
| Deflection of rudder | rad | |
| Deflection of elevator | rad | |
| Deflection of flaps | rad | |
| Actuator fault of aircraft | ||
| Known distribution matrix of actuator faults |
| Variable | Definition |
|---|---|
| 5D identity matrix | |
| 4D identity matrix |
References
- Zhang, K.; Jiang, B.; Yan, X.G.; Shen, J.; He, X. Incipient fault detection based on robust threshold generators: A sliding mode interval estimation approach. IFAC-Pap. OnLine 2017, 50, 5067–5672. [Google Scholar] [CrossRef]
- Wang, D.; Shi, P.; Wang, W. Robust fault detection for continue-time switched delay systems: An linear matrix approach. IET Control Theory Appl. 2010, 4, 100–108. [Google Scholar] [CrossRef]
- Ke, Y.; Wang, K.; Chen, B.M. Design and Implementation of a hybrid UAV with model-based flight capabilities. IEEE/ASME Trans. Mechatron 2018, 23, 1114–1125. [Google Scholar] [CrossRef]
- Alwi, H.; Edwards, C. An adaptive sliding mode differentiator for actuator oscillatory failure case reconstruction. Automatica 2013, 49, 642–651. [Google Scholar] [CrossRef]
- Mao, Z.; Yan, X.G.; Jiang, B.; Chen, M. Adaptive fault-tolerant sliding-mode control for high-speed trains with actuator faults and uncertainties. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2449–2460. [Google Scholar] [CrossRef]
- Jin, X.; Qin, J.; Shi, Y.; Zheng, W.X. Auxiliary fault tolerant control with actuator amplitude saturation and limited rate. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1816–1825. [Google Scholar] [CrossRef]
- Safaeipour, H.; Forouzanfar, M.; Casavola, A. A survey and classification of incipient fault diagnosis approaches. J. Process Control 2021, 97, 1–16. [Google Scholar] [CrossRef]
- Clark, R.N. Instrument fault detection. IEEE Trans. Aerosp. Electron. Syst. 1978, 14, 456–465. [Google Scholar] [CrossRef]
- Liu, J.; Yang, L.; Xu, M.; Zhang, Q.; Yan, R.; Chen, X. Model-based detection of soft faults using the smoothed residual for a control system. Meas. Sci. Technol. 2021, 32, 015107. [Google Scholar] [CrossRef]
- Chandra, K.P.B.; Chen, L.; Alwi, H.; Edwards, C. Development and evaluation of sliding mode schemes for the reconfigure benchmark problem. In Proceedings of the Conference on Control and Fault-Tolerant Systems, Barcelona, Spain, 7–9 September 2016; pp. 805–810. [Google Scholar]
- Zhang, J.; Swain, A.K.; Nguang, S.K. Detection and isolation of incipient sensor faults for a class of uncertain non-linear systems. IET Control Theory Appl. 2012, 6, 1870–1880. [Google Scholar] [CrossRef]
- Yan, K.; Chen, M.; Wu, Q.; Jiang, B. Extended state observer-based sliding mode fault-tolerant control for unmanned autonomous helicopter with wind gusts. IET Control Theory Appl. 2019, 13, 1454–1465. [Google Scholar] [CrossRef]
- Yan, X.G.; Edwards, C. Adaptive sliding-mode-observer-based fault reconstruction for nonlinear systems with parametric uncertainties. IEEE Trans. Ind. Electron. 2008, 55, 4029–4036. [Google Scholar]
- Zhang, J.; Swain, A.K.; Nguang, S.K. Robust sliding mode observer-based fault estimation for certain class of uncertain nonlinear systems. Asian J. Control 2015, 17, 1296–1309. [Google Scholar] [CrossRef]
- Chen, F.; Wang, Z.; Tao, G.; Jiang, B. Robust adaptive fault-tolerant control for hypersonic flight vehicles with multiple faults. J. Aerospace Eng. 2015, 28, 04014111. [Google Scholar] [CrossRef]
- Tan, C.P.; Edwards, C. An LMI approach for designing sliding mode observers for fault detection and isolation. In Proceedings of the European Control Conference, Pprto, Portugal, 4–7 September 2001; pp. 481–486. [Google Scholar]
- Nateghi, S.; Shtessel, Y.; Barbot, J.P.; Edwards, C. Cyber attack reconstruction of nonlinear systems via higher-order sliding-mode observer and sparse recovery algorithm. In Proceedings of the IEEE Conference on Decision and Control, Miami Beach, FL, USA, 17–19 December 2018; pp. 5963–5968. [Google Scholar]
- Shahriari-kahkeshi, M.; Sheikholeslam, F.; Askari, J. Adaptive fault detection and estimation scheme for a class of uncertain nonlinear systems. Nonlinear Dyn. 2015, 79, 2623–2637. [Google Scholar] [CrossRef]
- Zhang, X.; Polycarpou, M.M.; Parisini, T. A robust detection and isolation scheme for abrupt and incipient faults in nonlinear systems. IEEE Trans. Automat. Control 2002, 47, 576–593. [Google Scholar] [CrossRef]
- Liu, C.; Jiang, B.; Zhang, K. Incipient fault detection using an associated adaptive and sliding-mode observer for quadrotor helicopter attitude control systems. Circuits Syst. Signal Process. 2016, 35, 3555–3574. [Google Scholar] [CrossRef]
- Ding, B.; Fang, H. Fault prediction for nonlinear stochastic system with incipient faults based on particle filter and nonlinear regression. ISA Trans. 2017, 68, 327–334. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, B. Bibliographical review on reconfigurable fault-tolerant control systems. Ann. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Quan, L.; Jiang, B.; Yang, P. Actuator fault diagnosis for flight control system based on sliding mode observer. In Proceedings of the 30th Chinese Control and Decision Conference, Shenyang, China, 9–11 June 2018; pp. 3243–3247. [Google Scholar]
- Hamayun, M.T.; Edwards, C.; Alwi, H. An output integral sliding mode FTC scheme using control allocation. Stud. Syst. Decis. Control 2016, 61, 81–101. [Google Scholar]
- Alwi, H.; Edwards, C.; Tan, C.P. Sliding mode estimation schemes for incipient sensor faults. Automatica 2009, 45, 1679–1685. [Google Scholar] [CrossRef]
- Chen, W.; Yeh, C.P.; Yang, H. ToMFIR-based fault detection approach in frequency domain. J. Syst. Eng. Electron. 2011, 22, 33–37. [Google Scholar] [CrossRef]
- Wu, Y.; Jiang, B.; Lu, N. Incipient winding fault detection and isolation for induction motors of high-speed trains. In Proceedings of the Prognostics and System Health Management Conference, Harbin, China, 9–12 July 2017; pp. 1–6. [Google Scholar]
- McLean, D. Automatic Flight Control Systems; Prentice Hall: Hertfordshire, UK, 1990. [Google Scholar]
- Martin, C.; Jay, T. State and input estimation for a class of uncertain systems. Automatica 1998, 34, 757–764. [Google Scholar]
- Ben Brahim, A.; Dhahri, S.; Ben Hmida, F.; Sellami, A. Simultaneous actuator and sensor faults reconstruction based on robust sliding mode observer for a class of nonlinear systems. Asian J. Control 2017, 19, 362–371. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, Z.; Shen, Y. Fault detection and isolation method based on H−/H∞ unknown input observer design in finite frequency domain. Asian J. Control 2017, 19, 1777–1790. [Google Scholar] [CrossRef]
- Yu, L.; Xu, J.M.; Han, Q.L. Optimal guaranteed cost control of singular systems with delayed state and parameter uncertainties. In Proceedings of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 4811–4816. [Google Scholar]
- Edwards, C.; Tan, C.P. A comparison of sliding mode and unknown input observers for fault reconstruction. Euro J. Control 2006, 12, 245–260. [Google Scholar] [CrossRef]
- Nagesh, I.; Edwards, C.; Alwi, H. Comparison between unit vector and super-twisting sliding mode FDI design for actuator faults. In Proceedings of the Conference on Control and Fault-Tolerant Systems, Nice, France, 9–11 October 2013; pp. 146–151. [Google Scholar]
- Patel, N.; Edwards, C.; Spurgeon, S.K. An analysis of two nonlinear observers in the presence of noise. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 242–247. [Google Scholar]
- Zhao, K.; Li, P.; Zhang, C.; Li, X.; He, J.; Lin, Y. Sliding mode observer-based current sensor fault reconstruction and unknown load disturbance estimation for PMSM driven system. Sensors 2017, 17, 2833. [Google Scholar] [CrossRef]
- Fang, P.; Chen, W.; Zhang, G. Flight Dynamics of Aeronautical Vehicles; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2005; pp. 40–64. [Google Scholar]
- Rauw, M. A Simulink Environment for Flight Dynamics and Control Analysis Application to the DHC-2 ‘Beaver’. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1993; pp. 152–180. [Google Scholar]
- Wu, Y.; Jiang, B.; Lu, N.; Yang, H.; Zhou, Y. Multiple incipient sensor faults diagnosis with application to high-speed railway traction devices. ISA Trans. 2017, 67, 183–192. [Google Scholar] [CrossRef] [PubMed]



| Parameter | Meaning |
|---|---|
| FM | Measurement reference frame |
| FS | Stability reference frame |
| FR | Special body-fixed reference frame for the “Beaver” |
| FW | Flight-path reference frame |
| FV | Vehicle-carried vertical reference frame |
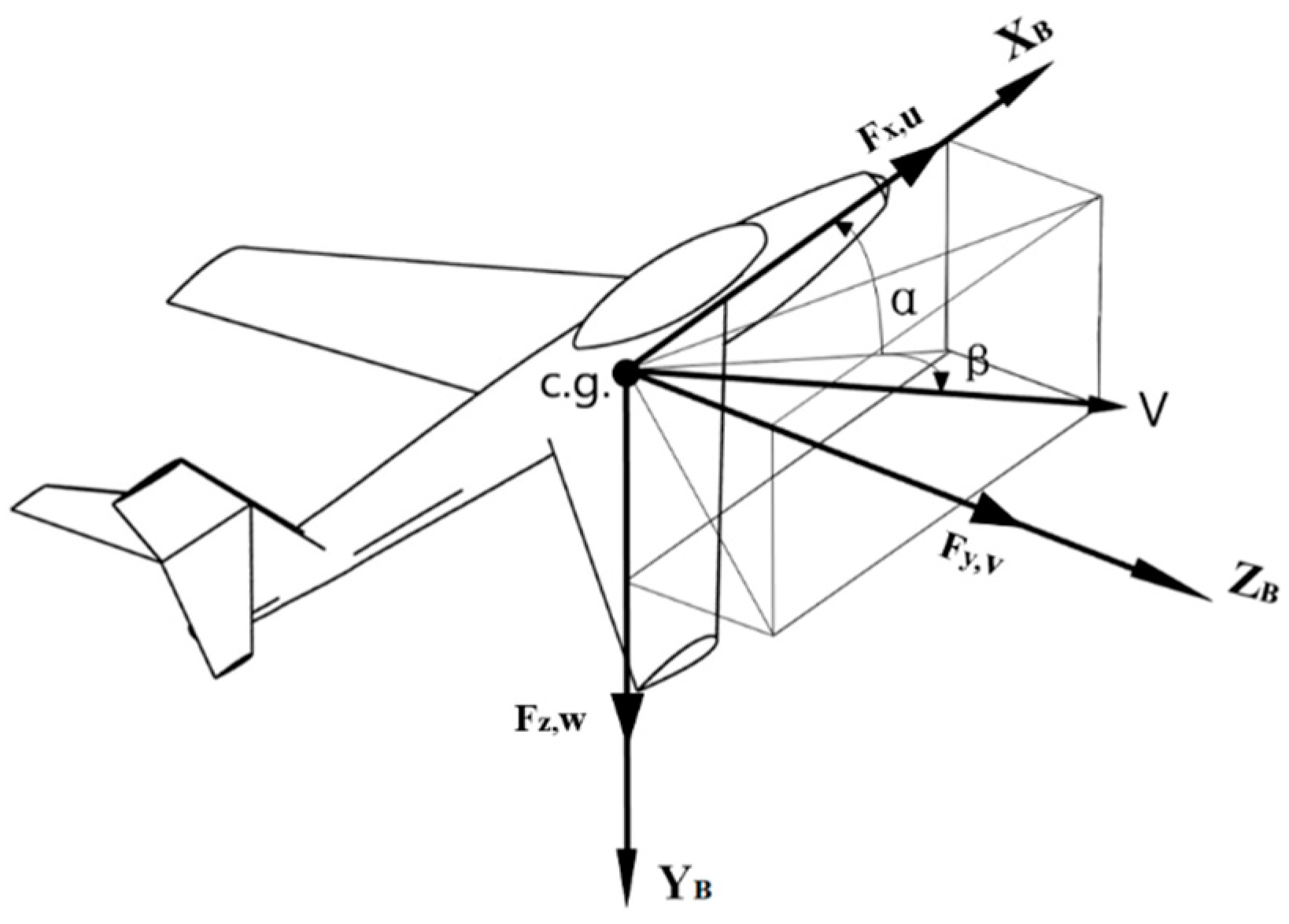
| Fx | Total external force along XB |
| Fy | Total external force along YB |
| Fz | Total external force along ZB |
| Step | Description |
|---|---|
| Step 1 | Set the matching conditions of the system and make relevant assumptions |
| Step 2 | Establish the system model, and make it meet certain conditions |
| Step 3 | Calculate the nonsingular transformation matrix to decouple the system model |
| Step 4 | Design the observer according to the transformed form of the system |
| Step 5 | Based on the establishment of the error equation of state estimation, the evaluation function and threshold are obtained according to the theoretical knowledge in Chapter 3 |
| Step 6 | Calculate relevant parameters according to the LMI algorithm |
| Step 7 | Use the calculated relevant parameters to substitute them into the observer algorithm for actuator fault diagnosis |
| Steps | Description |
|---|---|
| Step 1 | Set system matching conditions and make relevant assumptions based on fault detection |
| Step 2 | Calculate the tensor matrix and transform the output matrix in the system model |
| Step 3 | Calculate the nonsingular transformation matrix to further decouple the system model |
| Step 4 | Design the observer algorithm according to the transformed model |
| Step 5 | The idea of solving the problem is converted into LMI form, and the observer parameters are calculated by the LMI algorithm |
| Step 6 | Reconstruct actuator faults through adaptive fault reconstruction |
| Parameter | Value |
|---|---|
| Wing span b | 14.63 m |
| Wing area S | 23.23 m2 |
| Mean aerodynamic chord c | 1.5875 m |
| Wing dihedral | 1° |
| Wing profile | NACA 64 A 416 |
| Fuselage length | 9.22 m |
| Max. take-off weight | 2280 kg |
| Empty weight | 1497 kg |
| Max. power | 450 Hp at n = 2300 RPM, pz = 26″Hg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Zhao, W.; Liu, Z.; Dang, Q.; Zou, X.; Wang, K. Incipient Fault Detection and Reconstruction Using an Adaptive Sliding-Mode Observer for the Actuators of Fixed-Wing Aircraft. Aerospace 2023, 10, 422. https://doi.org/10.3390/aerospace10050422
Wang L, Zhao W, Liu Z, Dang Q, Zou X, Wang K. Incipient Fault Detection and Reconstruction Using an Adaptive Sliding-Mode Observer for the Actuators of Fixed-Wing Aircraft. Aerospace. 2023; 10(5):422. https://doi.org/10.3390/aerospace10050422
Chicago/Turabian StyleWang, Lina, Wen Zhao, Zhenbao Liu, Qingqing Dang, Xu Zou, and Kai Wang. 2023. "Incipient Fault Detection and Reconstruction Using an Adaptive Sliding-Mode Observer for the Actuators of Fixed-Wing Aircraft" Aerospace 10, no. 5: 422. https://doi.org/10.3390/aerospace10050422
APA StyleWang, L., Zhao, W., Liu, Z., Dang, Q., Zou, X., & Wang, K. (2023). Incipient Fault Detection and Reconstruction Using an Adaptive Sliding-Mode Observer for the Actuators of Fixed-Wing Aircraft. Aerospace, 10(5), 422. https://doi.org/10.3390/aerospace10050422