
An Intelligent Control and a Model Predictive Control for a Single Landing Gear Equipped with a Magnetorheological Damper

 , , , and
, , , and
Abstract
:1. Introduction
2. Mathematical Model of the MR Damper
2.1. Structure of the Landing Gear Equipped with an MR Damper
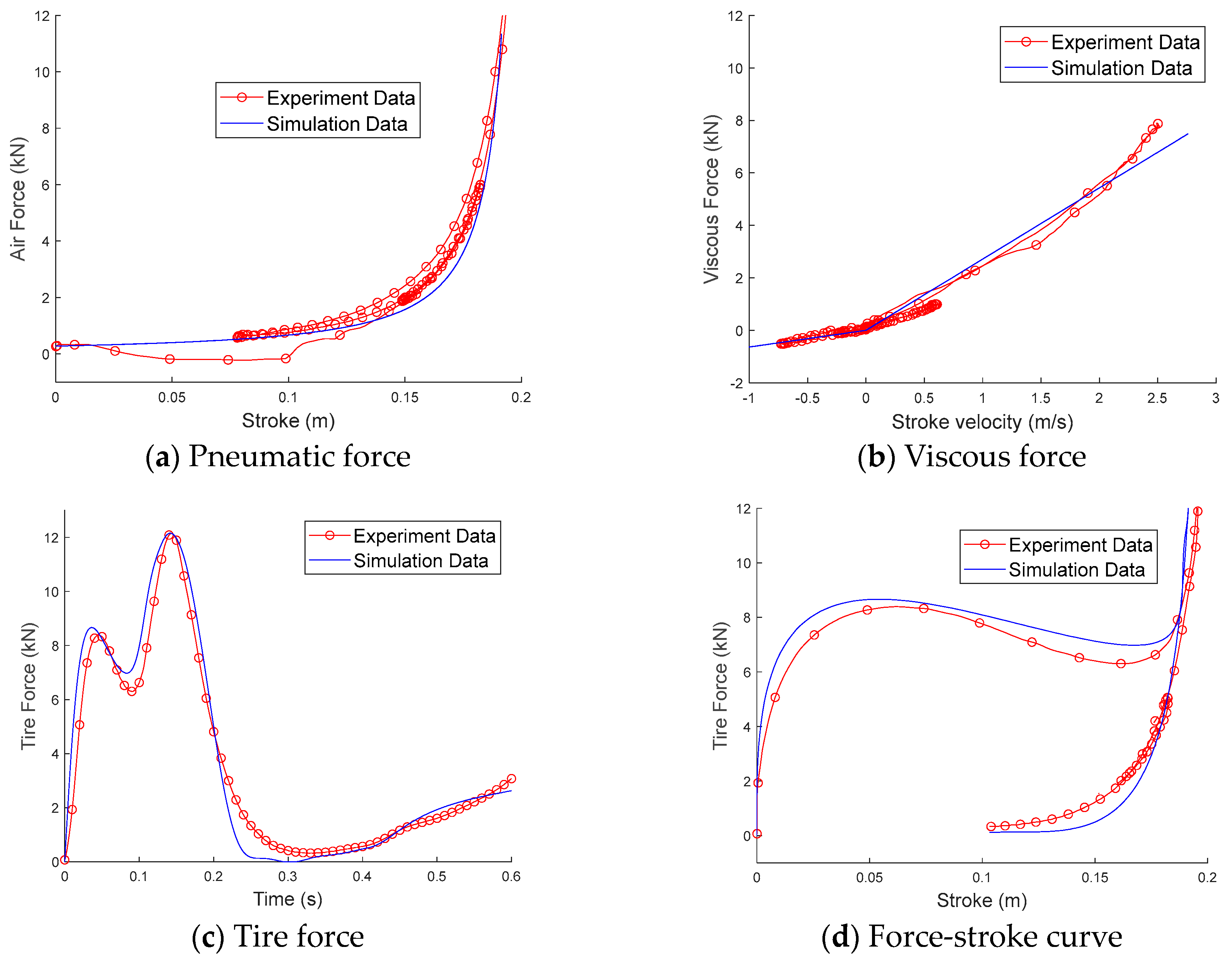
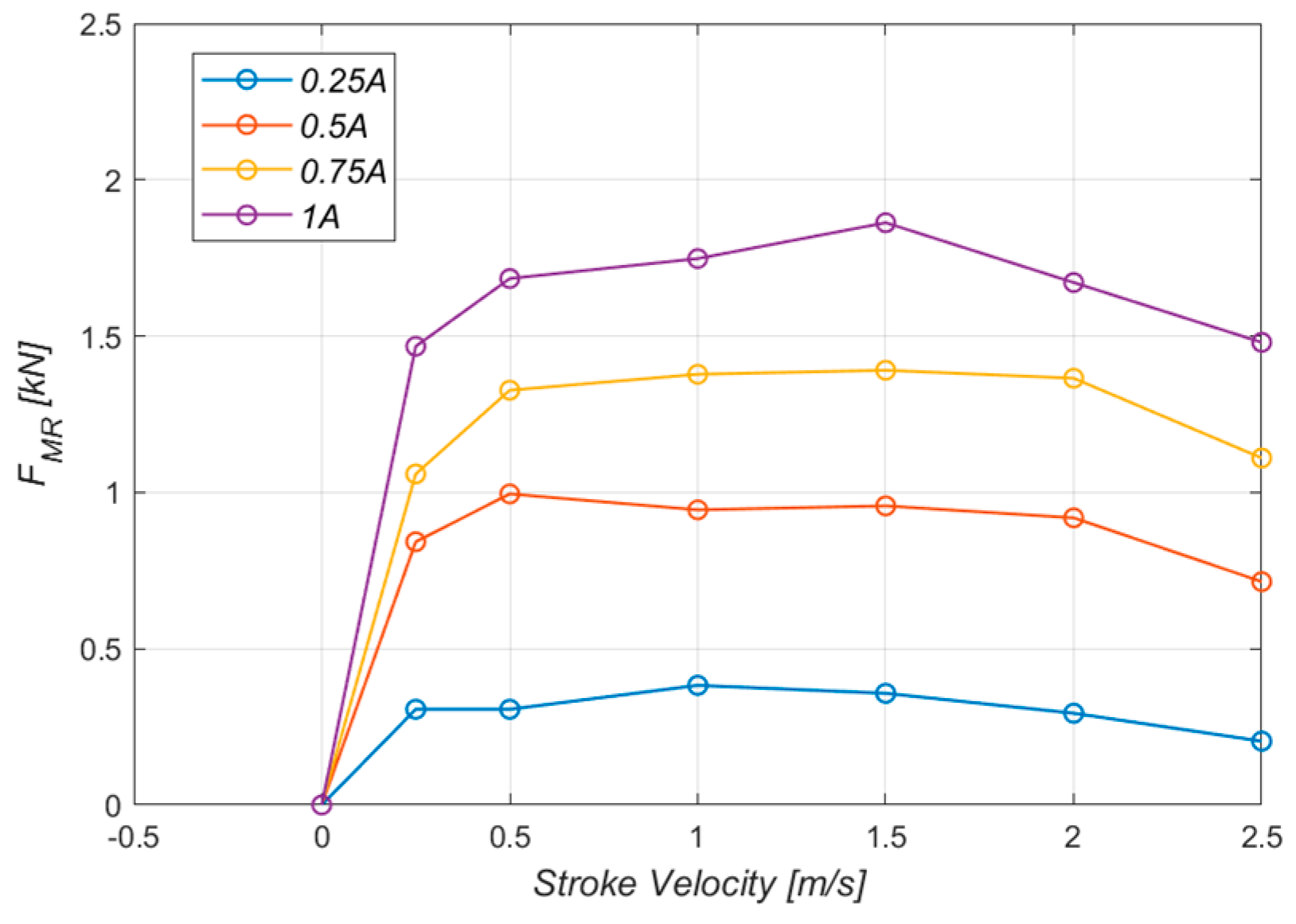
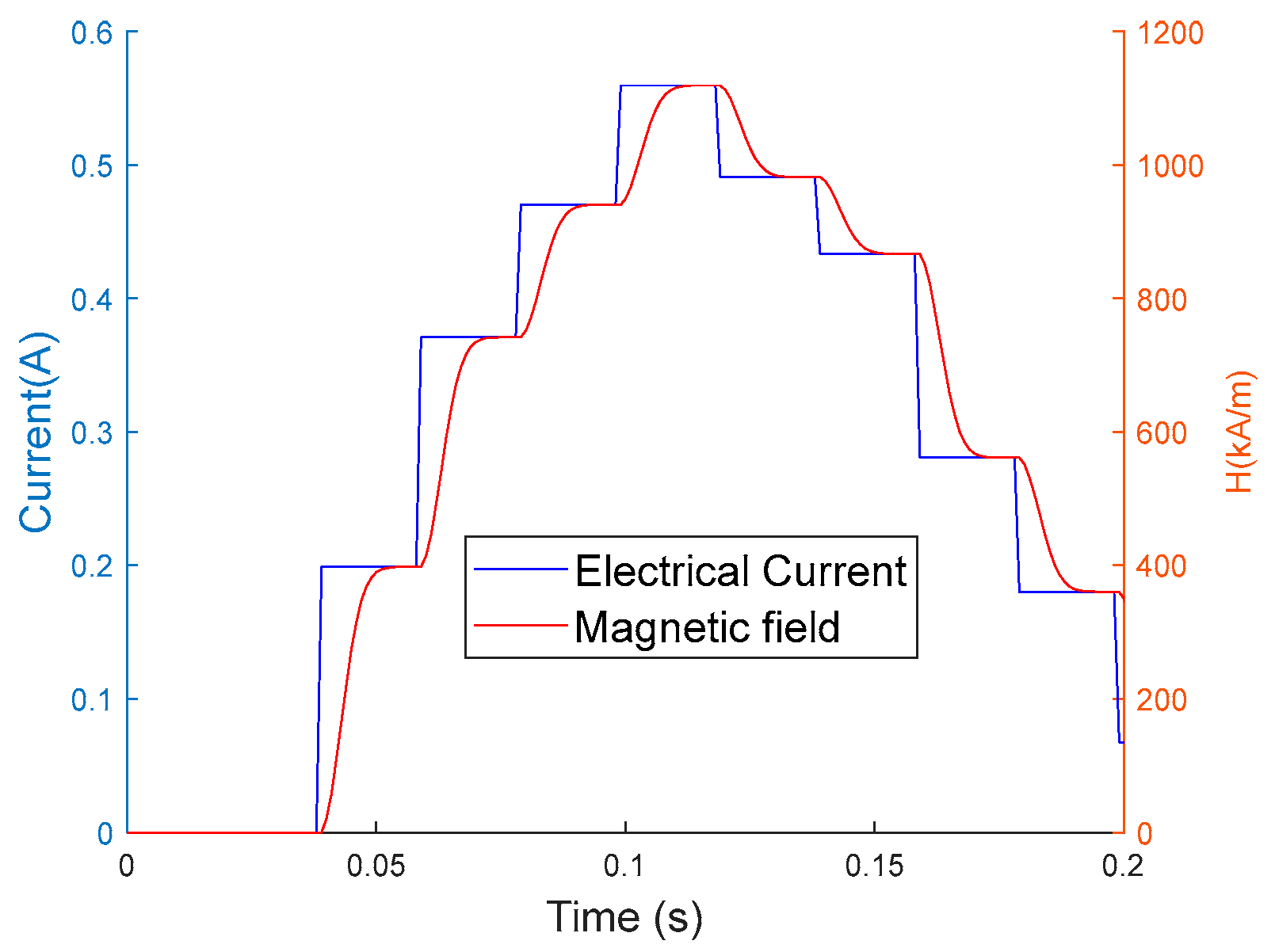
2.2. Mathematical Model
3. Control Design
3.1. Control Target
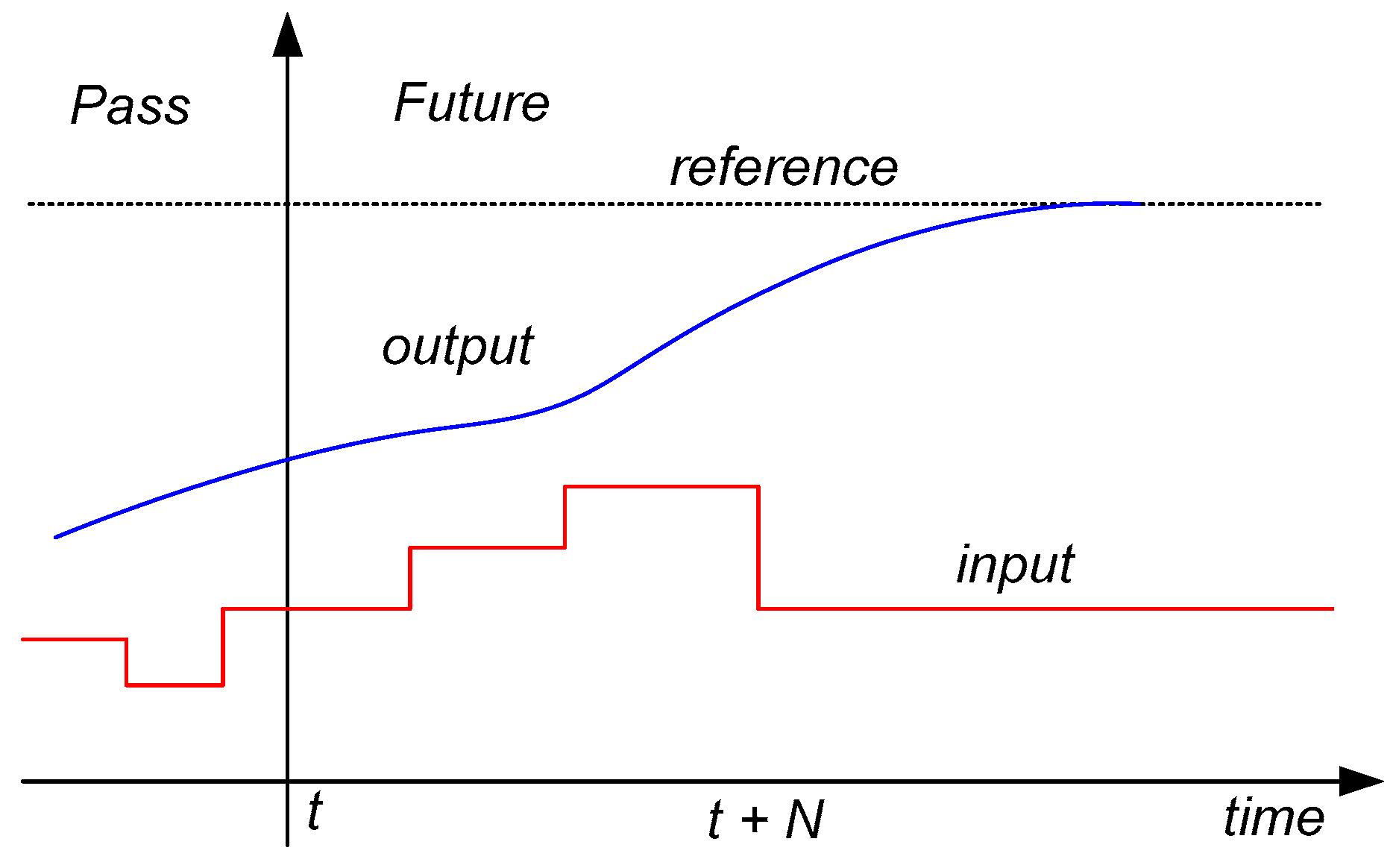
3.2. Model Predict Controller
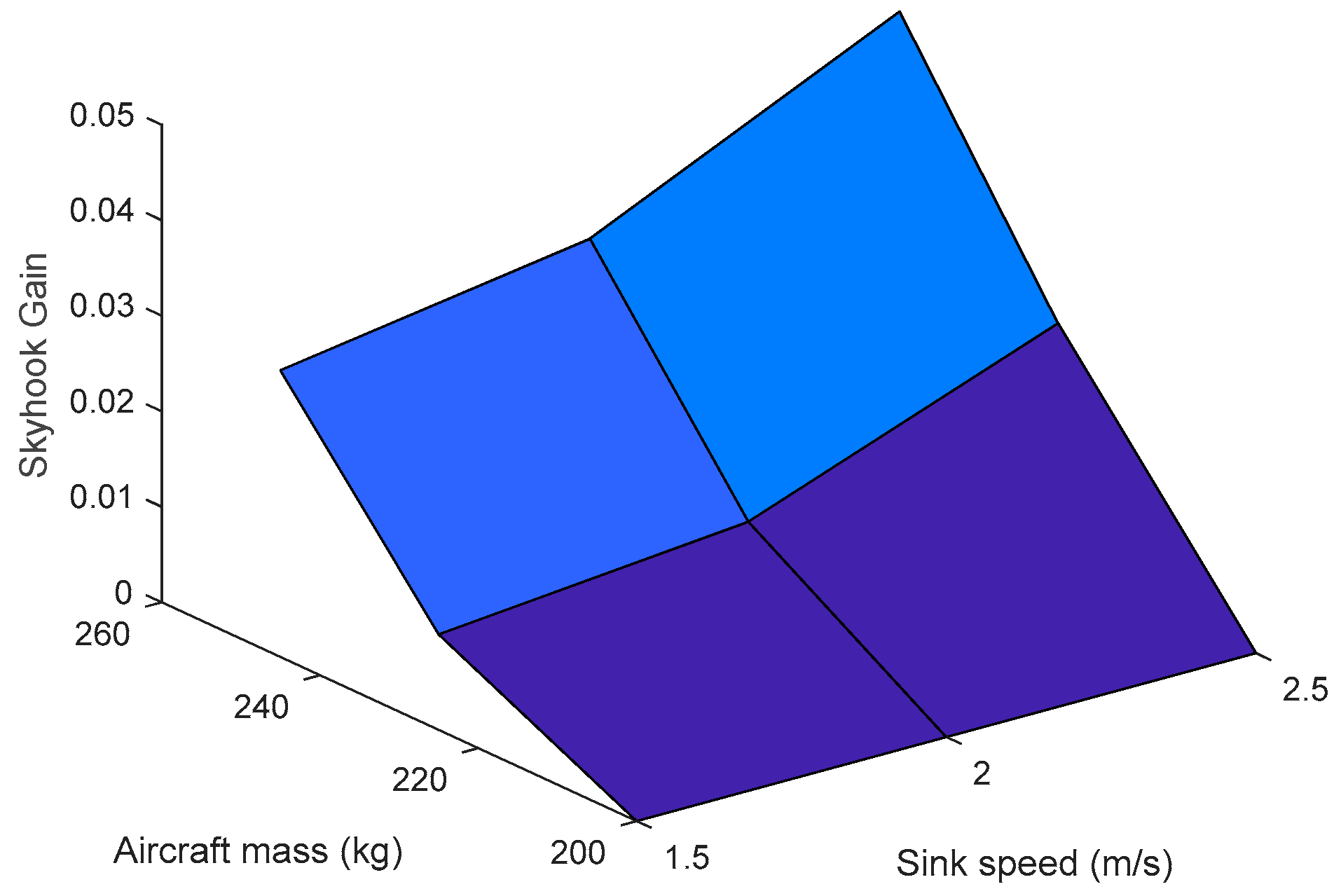
3.3. Bandit Neural Network Controller
- R ≤ bandit(W):
- If
- R = 0
- else:
- R = 0.9
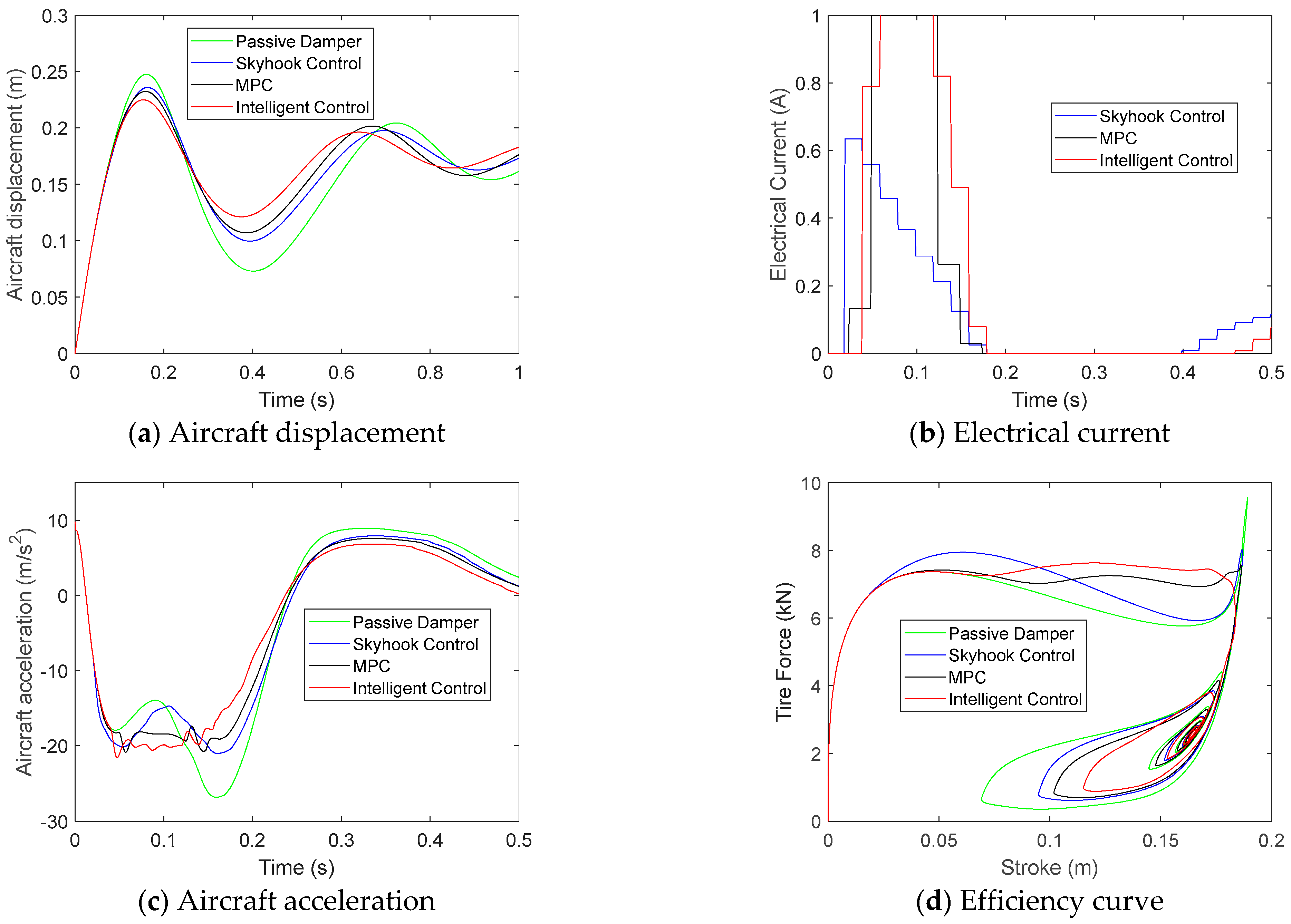
4. Result and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fallah, A.Y.; Taghikhany, T. Robust Semi-Active Control for Uncertain Structures and Smart Dampers. Smart Mater. Struct. 2014, 23, 095040. [Google Scholar] [CrossRef]
- Oh, J.-S.; Choi, S.-B. Ride Quality Control of a Full Vehicle Suspension System Featuring Magnetorheological Dampers with Multiple Orifice Holes. Front. Mater. 2019, 6, 8. [Google Scholar] [CrossRef]
- Chae, H.D.; Choi, S.-B. A New Vibration Isolation Bed Stage with Magnetorheological Dampers for Ambulance Vehicles. Smart Mater. Struct. 2015, 24, 017001. [Google Scholar] [CrossRef]
- Bui, Q.-D.; Nguyen, Q.H.; Nguyen, T.T.; Mai, D.-D. Development of a Magnetorheological Damper with Self-Powered Ability for Washing Machines. Appl. Sci. 2020, 10, 4099. [Google Scholar] [CrossRef]
- Choi, Y.-T.; Wereley, N.M. Vibration Control of a Landing Gear System Featuring Electrorheological/Magnetorheological Fluids. J. Aircr. 2003, 40, 432–439. [Google Scholar] [CrossRef]
- Choi, Y.-T.; Robinson, R.; Hu, W.; Wereley, N.M.; Birchette, T.S.; Bolukbasi, A.O.; Woodhouse, J. Analysis and Control of a Magnetorheological Landing Gear System for a Helicopter. J. Am. Helicopter Soc. 2016, 61, 1–8. [Google Scholar] [CrossRef]
- Choi, S.-B.; Han, Y.-M. Magnetorheological Fluid Technology; CRC Press: Boca Raton, FL, USA, 2012; ISBN 978-1-4398-5674-1. [Google Scholar]
- Guo, D.L.; Hu, H.Y.; Yi, J.Q. Neural Network Control for a Semi-Active Vehicle Suspension with a Magnetorheological Damper. J. Vib. Control 2004, 10, 461–471. [Google Scholar] [CrossRef]
- Strecker, Z.; Mazůrek, I.; Roupec, J.; Klapka, M. Influence of MR Damper Response Time on Semiactive Suspension Control Efficiency. Meccanica 2015, 50, 1949–1959. [Google Scholar] [CrossRef]
- Koo, J.-H.; Goncalves, F.D.; Ahmadian, M. A Comprehensive Analysis of the Response Time of MR Dampers. Smart Mater. Struct. 2006, 15, 351–358. [Google Scholar] [CrossRef]
- Yoon, D.-S.; Park, Y.-J.; Choi, S.-B. An Eddy Current Effect on the Response Time of a Magnetorheological Damper: Analysis and Experimental Validation. Mech. Syst. Signal Process. 2019, 127, 136–158. [Google Scholar] [CrossRef]
- Strecker, Z.; Roupec, J.; Mazurek, I.; Machacek, O.; Kubik, M.; Klapka, M. Design of Magnetorheological Damper with Short Time Response. J. Intell. Mater. Syst. Struct. 2015, 26, 1951–1958. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhu, S. Nonlinear Time-Delay Suspension Adaptive Neural Network Active Control. Abstr. Appl. Anal. 2014, 2014, 765871. [Google Scholar] [CrossRef]
- Tao, L.; Chen, S.; Fang, G.; Zu, G. Smith Predictor-Taylor Series-Based LQG Control for Time Delay Compensation of Vehicle Semiactive Suspension. Shock. Vib. 2019, 2019, 3476826. [Google Scholar] [CrossRef]
- Hong, S.-R.; John, S.; Wereley, N.M.; Choi, Y.-T.; Choi, S.-B. A Unifying Perspective on the Quasi-Steady Analysis of Magnetorheological Dampers. J. Intell. Mater. Syst. Struct. 2008, 19, 959–976. [Google Scholar] [CrossRef]
- Yoon, J.-Y.; Kang, B.-H.; Kim, J.-H.; Choi, S.-B. New Control Logic Based on Mechanical Energy Conservation for Aircraft Landing Gear System with Magnetorheological Dampers. Smart Mater. Struct. 2020, 29, 084003. [Google Scholar] [CrossRef]
- Jo, B.-H.; Jang, D.-S.; Hwang, J.-H.; Choi, Y.-H. Experimental Validation for the Performance of MR Damper Aircraft Landing Gear. Aerospace 2021, 8, 272. [Google Scholar] [CrossRef]
- Knap, L.; Makowski, M.; Siczek, K.; Kubiak, P.; Mrowicki, A. Hydraulic Vehicle Damper Controlled by Piezoelectric Valve. Sensors 2023, 23, 2007. [Google Scholar] [CrossRef] [PubMed]
- Qin, S.J.; Badgwell, T.A. A Survey of Industrial Model Predictive Control Technology. Control Eng. Pract. 2003, 11, 733–764. [Google Scholar] [CrossRef]
- Mai, V.N.; Yoon, D.-S.; Choi, S.-B.; Kim, G.-W. Explicit Model Predictive Control of Semi-Active Suspension Systems with Magneto-Rheological Dampers Subject to Input Constraints. J. Intell. Mater. Syst. Struct. 2020, 31, 1157–1170. [Google Scholar] [CrossRef]
- Dong, X.; Fei, Z.; Zhang, Z.; Deng, X.; Li, P.; Liu, Q. Gray Skyhook Predictive Control of Magnetorheological Semi-Active Seat Suspension with Time Delay. Smart Mater. Struct. 2023, 32, 115010. [Google Scholar] [CrossRef]
- Kiumarsi, B.; Vamvoudakis, K.G.; Modares, H.; Lewis, F.L. Optimal and Autonomous Control Using Reinforcement Learning: A Survey. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 2042–2062. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Velswamy, K.; Huang, B. A Novel Approach to Feedback Control with Deep Reinforcement Learning. IFAC-PapersOnLine 2018, 51, 31–36. [Google Scholar] [CrossRef]
- Konar, A. Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2005; ISBN 978-3-540-20898-3. [Google Scholar]
- Mosavi, A.; Varkonyi, A. Learning in Robotics. IJCA 2017, 157, 8–11. [Google Scholar] [CrossRef]
- Bouneffouf, D.; Rish, I. A Survey on Practical Applications of Multi-Armed and Contextual Bandits. arXiv 2019, arXiv:1904.10040. [Google Scholar]
- Cassel, A.; Koren, T. Bandit Linear Control. Adv. Neural Inf. Process. Syst. 2020, 33, 8872–8882. [Google Scholar]
- Luong, Q.-V.; Jo, B.-H.; Hwang, J.-H.; Jang, D.-S. A Supervised Neural Network Control for Magnetorheological Damper in an Aircraft Landing Gear. Appl. Sci. 2021, 12, 400. [Google Scholar] [CrossRef]
- Luong, Q.V.; Jang, D.-S.; Hwang, J.-H. Intelligent Control Based on a Neural Network for Aircraft Landing Gear with a Magnetorheological Damper in Different Landing Scenarios. Appl. Sci. 2020, 10, 5962. [Google Scholar] [CrossRef]
- Luong, Q.V.; Jang, D.-S.; Hwang, J.-H. Robust Adaptive Control for an Aircraft Landing Gear Equipped with a Magnetorheological Damper. Appl. Sci. 2020, 10, 1459. [Google Scholar] [CrossRef]
- Michal, K.; Ondřej, M.; Zbyněk, S.; Jakub, R.; Petr, N.; Ivan, M. Transient Magnetic Model of Magnetorheological Damper and Its Experimental Verification. MATEC Web Conf. 2018, 153, 06002. [Google Scholar] [CrossRef]
- Currey, N.S. Aircraft Landing Gear Design: Principles and Practices; AIAA Education Series: United States of America; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1988; ISBN 0930403. [Google Scholar]
- Schwenzer, M.; Ay, M.; Bergs, T.; Abel, D. Review on Model Predictive Control: An Engineering Perspective. Int. J. Adv. Manuf. Technol. 2021, 117, 1327–1349. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A. Reinforcement Learning: An Introduction, 2nd ed.; Adaptive Computation and Machine Learning; The MIT Press: Cambridge, MA, USA; London, UK, 2020; ISBN 978-0-262-03924-6. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value | Unit |
|---|---|---|---|
| Ap | cross-area of the head piston | 2.1 × 10−3 | m2 |
| b | tire force index used to assess the nonlinearity of the tires | 1.13 | |
| C | viscous damping coefficient | 9.77 | kNs/m |
| g | gravitational acceleration | 9.81 | m/s2 |
| m1 | sprung mass (aircraft mass) | 200~245 | kg |
| m2 | un-sprung mass | 18 | kg |
| n | polytropic process index | 1.3 | |
| p0 | initial air chamber charging pressure | 100 | kPa |
| kT | tire force constant | 163 | kN/m |
| v | initial sink speed of aircraft at touchdown | 1.5–2.5 | m/s |
| V0 | initial air chamber volume | 4.26 × 10−4 | m3 |
| u | control input (electrical current) | 0~1 | A |
| Aircraft Mass (kg) | ||||
|---|---|---|---|---|
| 200 | 225 | 245 | ||
| Sink speed (m/s) | 1.5 | η1 | η2 | η3 |
| 2 | η4 | η5 | η6 | |
| 2.5 | η7 | η8 | η9 | |
| Passive Damper | Skyhook Control | MPC | Intelligent Control | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
(kN) | (m) | η (%) | (kN) | (m) | η (%) | (kN) | (m) | η (%) | (kN) | (m) | η (%) | |
| m1 = 200 kg | ||||||||||||
| v = 1.5 m/s | 4.72 | 0.172 | 79.5 | 4.72 | 0.172 | 79.5 | 4.72 | 0.166 | 81.0 | 4.72 | 0.162 | 82.3 |
| v = 2 m/s | 5.98 | 0.177 | 80.5 | 5.98 | 0.177 | 80.5 | 5.98 | 0.173 | 82.3 | 6.01 | 0.159 | 86.8 |
| v = 2.5 m/s | 7.26 | 0.183 | 82.8 | 7.26 | 0.183 | 82.8 | 7.26 | 0.180 | 84.9 | 7.45 | 0.166 | 89.0 |
| m1 = 225 kg | ||||||||||||
| v = 1.5 m/s | 4.77 | 0.179 | 84.8 | 4.77 | 0.179 | 84.8 | 4.79 | 0.175 | 86.5 | 4.77 | 0.170 | 88.5 |
| v = 2 m/s | 6.85 | 0.183 | 85.0 | 6.85 | 0.183 | 85.0 | 6.04 | 0.179 | 87.9 | 6.05 | 0.172 | 91.2 |
| v = 2.5 m/s | 8.68 | 0.184 | 71.9 | 7.50 | 0.186 | 87.4 | 7.3 | 0.186 | 88.5 | 7.75 | 0.175 | 91.0 |
| m1 = 245 kg | ||||||||||||
| v = 1.5 m/s | 5.82 | 0.183 | 73.2 | 5.13 | 0.180 | 84.8 | 5.53 | 0.169 | 87.5 | 4.81 | 0.176 | 92.9 |
| v = 2 m/s | 7.37 | 0.186 | 72.4 | 6.5 | 0.183 | 86.4 | 6.35 | 0.179 | 90.1 | 6.08 | 0.179 | 94.4 |
| v = 2.5 m/s | 9.55 | 0.189 | 68.3 | 8.05 | 0.186 | 87.2 | 8.04 | 0.180 | 92.6 | 7.54 | 0.184 | 95.2 |
| m1 = 200 kg (Random Case 1) | ||||||||||||
| v = 2.25 m/s | 6.62 | 0.180 | 81.6 | 6.62 | 0.180 | 81.6 | 6.62 | 0.178 | 82.7 | 6.72 | 0.162 | 88.2 |
| m2 = 225 kg (Random Case 2) | ||||||||||||
| v = 2.75 m/s | 9.18 | 0.189 | 75.6 | 8.32 | 0.187 | 86.2 | 8.65 | 0.183 | 87.9 | 8.20 | 0.182 | 93.8 |
| m3 = 245 kg (Random Case 3) | ||||||||||||
| v = 1.75 m/s | 6.50 | 0.184 | 73.4 | 5.82 | 0.180 | 85.4 | 5.80 | 0.177 | 86.7 | 5.44 | 0.177 | 93.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Le, Q.-N.; Park, H.-M.; Kim, Y.; Pham, H.-H.; Hwang, J.-H.; Luong, Q.-V. An Intelligent Control and a Model Predictive Control for a Single Landing Gear Equipped with a Magnetorheological Damper. Aerospace 2023, 10, 951. https://doi.org/10.3390/aerospace10110951
Le Q-N, Park H-M, Kim Y, Pham H-H, Hwang J-H, Luong Q-V. An Intelligent Control and a Model Predictive Control for a Single Landing Gear Equipped with a Magnetorheological Damper. Aerospace. 2023; 10(11):951. https://doi.org/10.3390/aerospace10110951
Chicago/Turabian StyleLe, Quang-Ngoc, Hyeong-Mo Park, Yeongjin Kim, Huy-Hoang Pham, Jai-Hyuk Hwang, and Quoc-Viet Luong. 2023. "An Intelligent Control and a Model Predictive Control for a Single Landing Gear Equipped with a Magnetorheological Damper" Aerospace 10, no. 11: 951. https://doi.org/10.3390/aerospace10110951
APA StyleLe, Q.-N., Park, H.-M., Kim, Y., Pham, H.-H., Hwang, J.-H., & Luong, Q.-V. (2023). An Intelligent Control and a Model Predictive Control for a Single Landing Gear Equipped with a Magnetorheological Damper. Aerospace, 10(11), 951. https://doi.org/10.3390/aerospace10110951