
Progress in Redundant Electromechanical Actuators for Aerospace Applications



Abstract
:1. Introduction
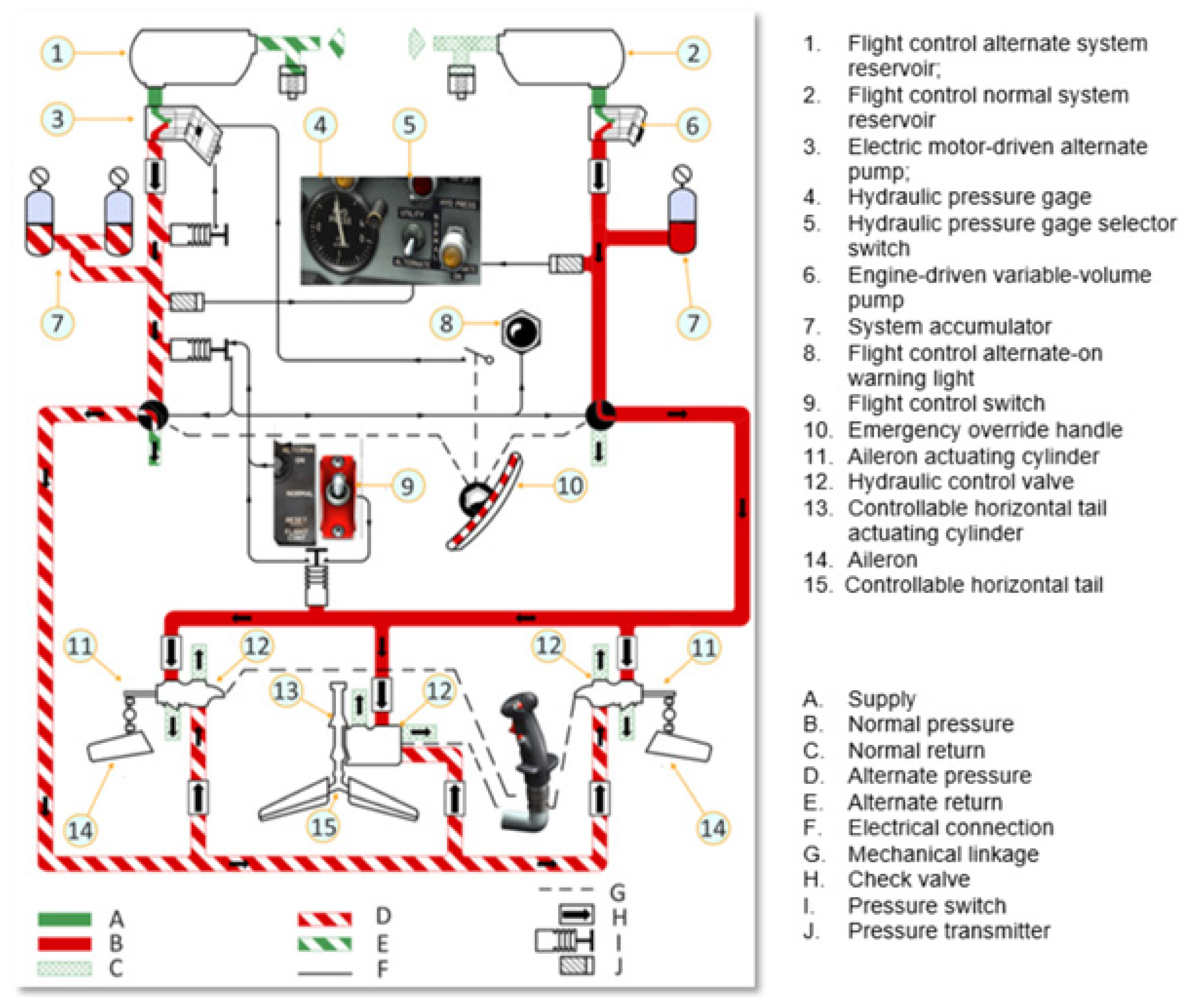
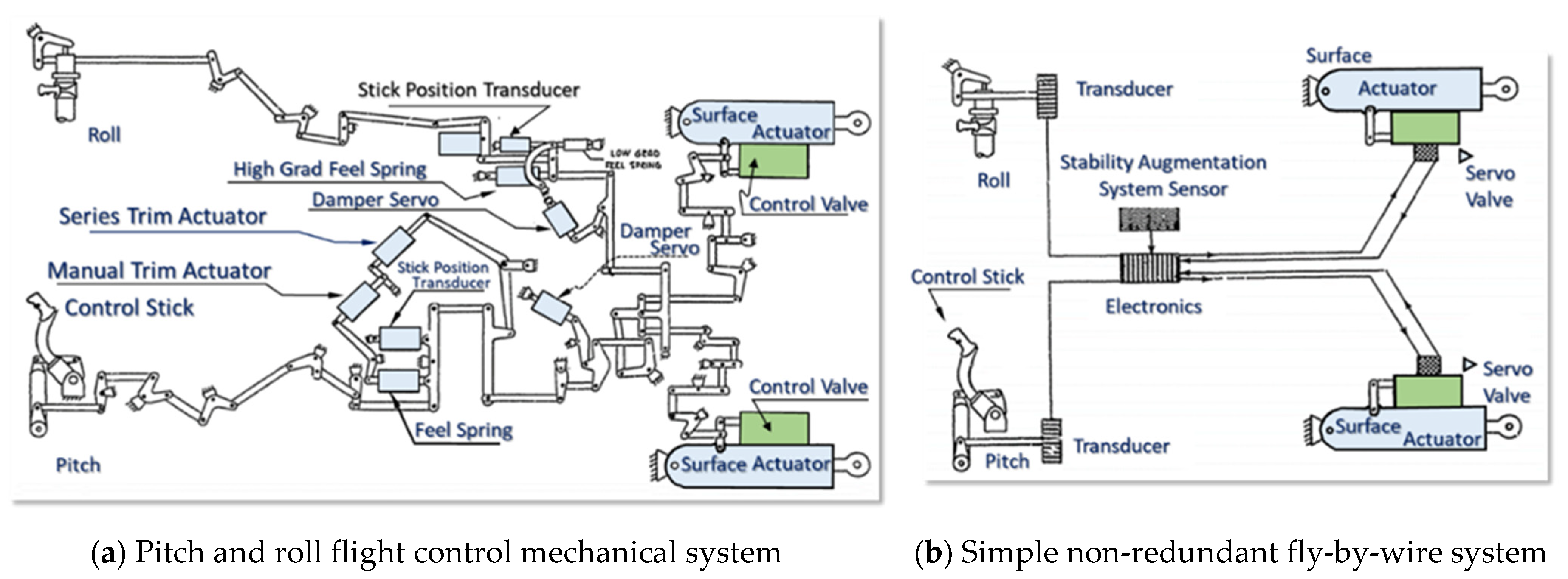
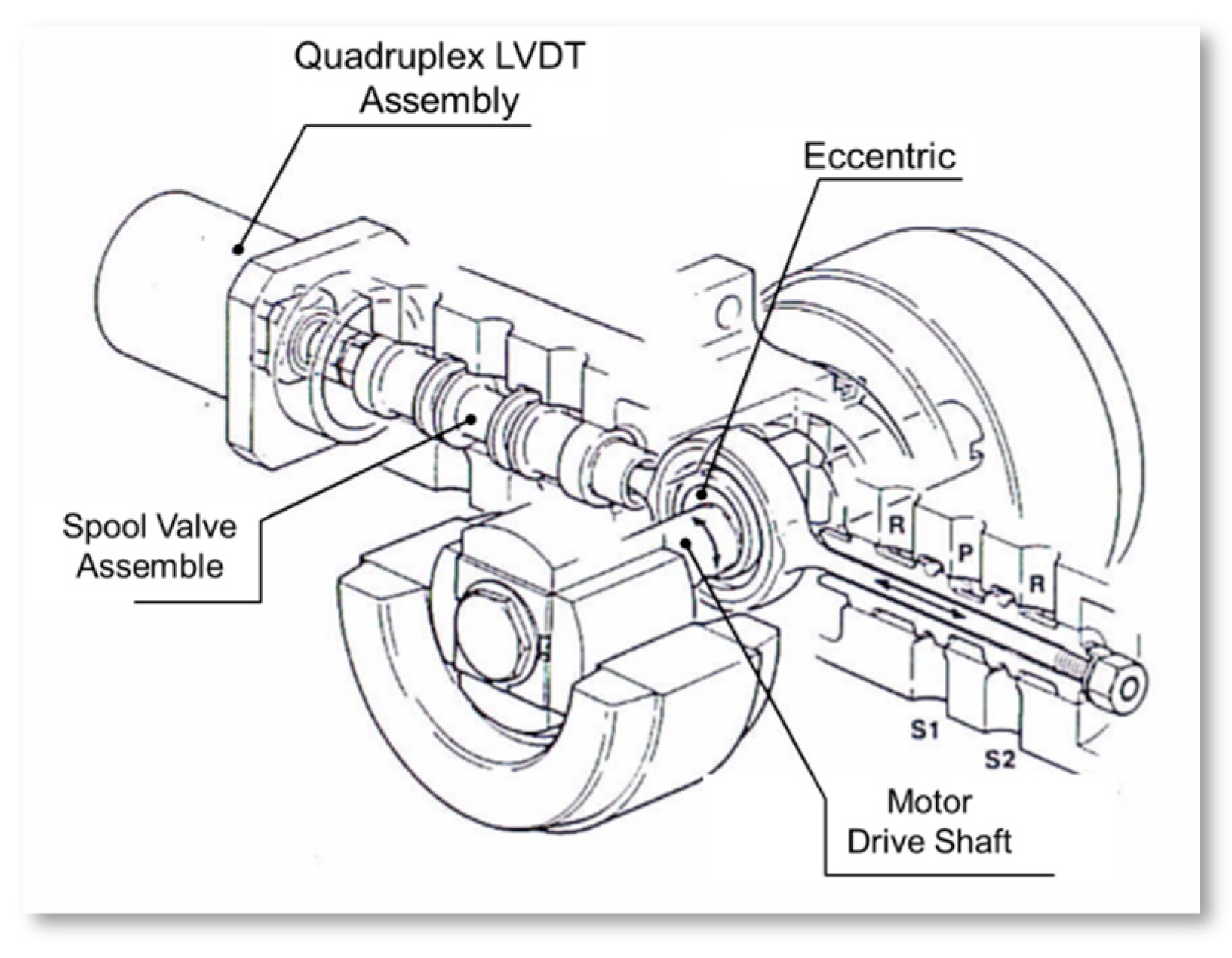
2. Electrohydraulic Actuation Systems
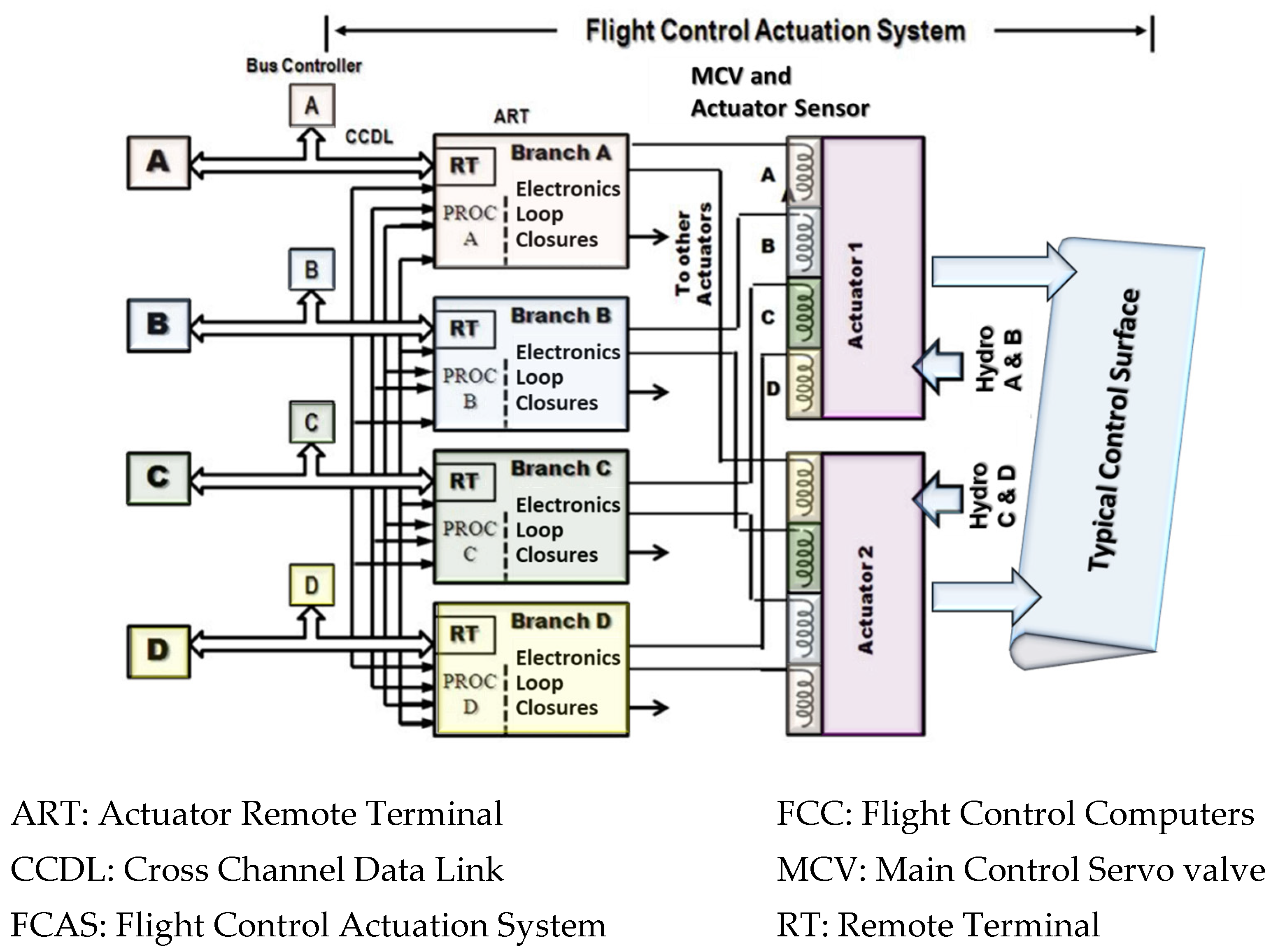
3. Electromechanical Actuation Systems
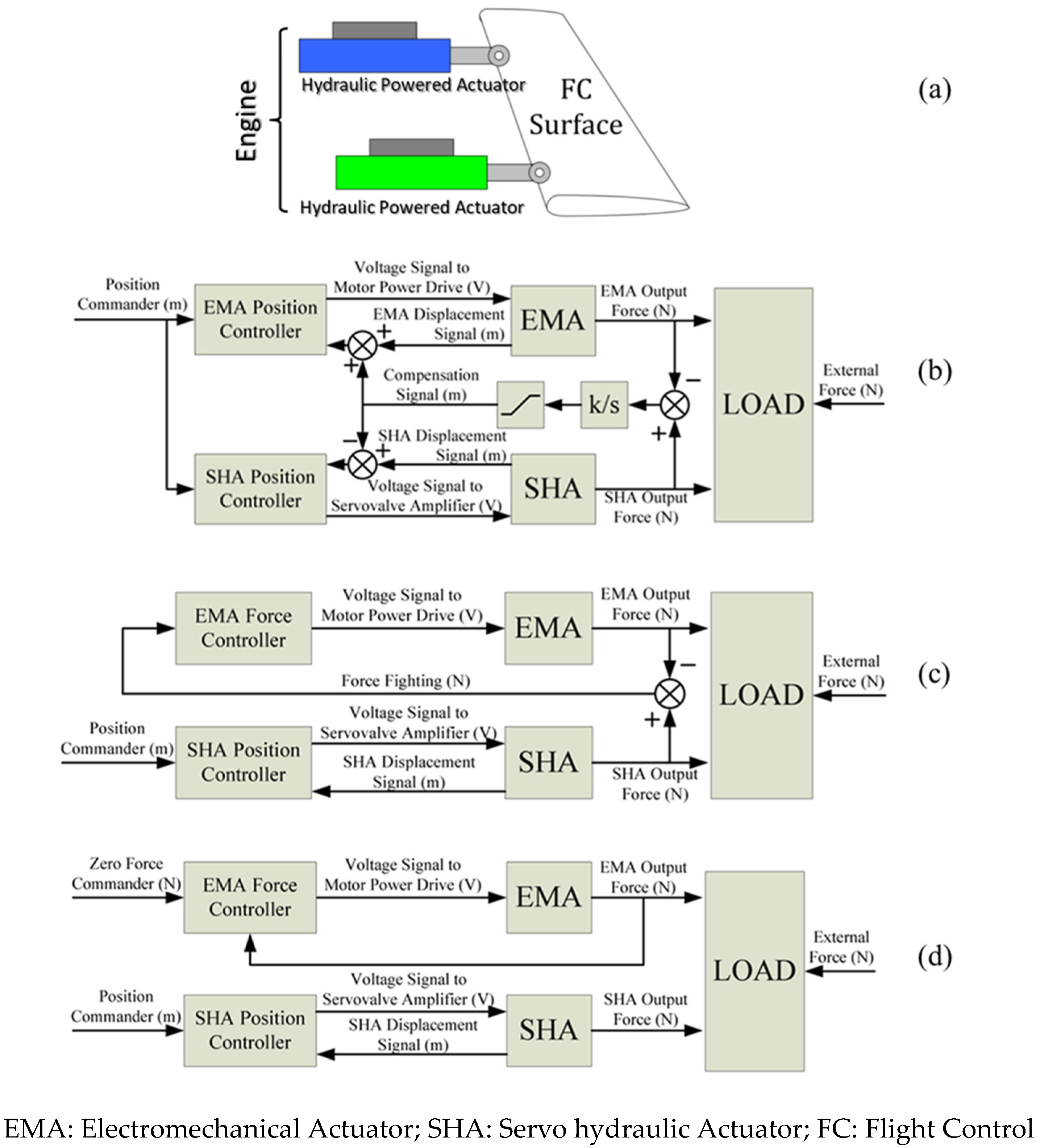
4. Force Fight in Redundant Actuation Systems
- (1)
- Position control of a combination of servo-hydraulic and electromechanical actuators, where FF signals were used to compensate position feedback signals by tuning the position sensors offsets (Figure 15b);
- (2)
- Force control of a combination of servo-hydraulic actuator (SHA) and electromechanical actuator (EMA), where motor current control achieved faster control response (Figure 15c);
- (3)
- No-load control of a combination of servo-hydraulic and electromechanical actuators, where FF is cancelled as the EMA did not have a direct influence on the load position (Figure 15d).
5. Trends in Redundant Actuation Systems Design
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ART | Actuator Remote Terminal |
| AEA | All Electric Aircraft |
| BAe | British Aerospace |
| BDCM | Brushless DC Motor |
| Input Filter Capacitance | |
| DDV | Direct-Drive Valve |
| EAP | Experimental Aircraft Project |
| EHAS | Electrohydraulic Actuation System |
| EHSV | Electrohydraulic Servo Valve |
| ELGER system | Electric Landing Gear Extend and Retract System |
| EMA | Electromechanical Actuator |
| EPAD Program | Electrically Powered Actuation Design Program |
| FBW | Fly-by-Wire |
| Input Filter Inductance | |
| JUCAS Program | Joint Unmanned Combat Air System |
| Velocity Feedback | |
| LEMAS Program | Large Electromechanical Actuation System Program |
| LVDT | Linear Variable Differential/distance Transformer |
| MEA | More Electric Aircraft |
| Gearbox ratio | |
| SHA | Servo-Hydraulic Actuator |
References
- Xie, Y.; Antonios, T.; Dan, Z.; Jason, G. Review of hybrid electric powered aircraft, its conceptual design and energy management methodologies. Chin. J. Aeronaut. 2020, 34, 432–450. [Google Scholar] [CrossRef]
- Boll, M.; Corduan, M.; Biser, S.; Filipenko, M.; Pham, Q.H.; Schlachter, S.; Rostek, P.; Noe, M. A holistic system approach for short range passenger aircraft with cryogenic propulsion system. Supercond. Sci. Technol. 2020, 33, 044014. [Google Scholar] [CrossRef]
- Ojeda-Rodríguez, A.; González-Vizuete, P.; Bernal-Méndez, J.; Martín-Prats, M.A. A Survey on Bidirectional DC/DC Power Converter Topologies for the Future Hybrid and All Electric Aircrafts. Energies 2020, 13, 4883. [Google Scholar] [CrossRef]
- Li, J.; Yu, Z.; Huang, Y.; Li, Z. A Review of electromechanical actuation system for more electric aircraft. In Proceedings of the 2016 IEEE/CSAA International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016. [Google Scholar]
- Jones, R.I. The More Electric Aircraft-Assessing the Benefits. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2002, 216, 259–269. [Google Scholar] [CrossRef]
- Breit, J. Systematic Approach to an Improved Electrical Power System Architecture for a Future More Electric Airplane; SAE International: Warrendale, PA, USA, 2021; pp. 1–11. [Google Scholar]
- Glass-Hooper, D.T. The elctric control of large aeroplanes. Flight 1916, 8, 1118–1119. [Google Scholar]
- Howard, R.H. Automatic Flight Controls in Fixed Wing Aircraft-The first 100 years. Aeronaut. J. 1973, 77, 533–562. [Google Scholar] [CrossRef]
- Cronin, M.J. The prospects and potential of all electric aircraft. In Proceedings of the AIAA, Aircraft Design, Systems and Technology Meeting, Fort Worth, TX, USA, 1–17 October 1983. [Google Scholar]
- Kammermann, J.; Bolvashenkov, I.; Tran, K.; Herzog, H.G.; Frenkel, I. Feasibility Study for a Full-Electric Aircraft Considering Weight, Volume, and Reliability Requirements. In Proceedings of the International Conference on Electrotechnical Complexes and Systems (ICOECS), Ufa, Russia, 27–30 October 2020. [Google Scholar]
- Patel, V.; Buccella, C.; Cecati, C. Analysis and Implementation of Multilevel Inverter for Full Electric Aircraft Drives. Energies 2020, 13, 6126. [Google Scholar] [CrossRef]
- Viswanathan, V.; Knapp, B.M. Potential for electric aircraft. Nat. Sustain. 2019, 2, 88–89. [Google Scholar] [CrossRef]
- Miller, F.L.; Emfinger, J.E. Fly-By-Wire Techniques; Air Force Flight Dynamics Lab, Air Force Systems, Command Wright-Patterson Air Force Base: Fairborn, OH, USA, 1967. [Google Scholar]
- Sutherland, J.P. Fly by Wire: Flight Control Systems. In Proceedings of the Joint Meeting of Flight Mechanics and Guidance and Control Panels of AGARD, Oslo, Norway, 3 September 1968. [Google Scholar]
- Larry, D. North American F-86 Sabre; The Aviation History Online Museum: Online, 2013; Available online: http://www.aviation-history.com/north-american/f86.html (accessed on 17 September 2021).
- Rudder, S. Boeing 727-228; JetPhotos: Harlingen, The Netherlands, 2016. [Google Scholar]
- Warbird, “USAF History: F-4 Phantoms at Tinker AFB”; Vintage Aviation Publications: Huntington, IN, USA, 2017.
- Peitzmeier, H. F-104 Starfighter; Airplane Driver’s Network: Germany, 2018. [Google Scholar]
- Warbird, “F-105 Thunderchief”; Vintage Aviation Publications: Huntington, IN, USA, 2017.
- Thapa, N.; Ram, S.; Kumar, S.; Mehta, J. All electric aircraft: A reality on its way. Mater. Today Proc. 2021, 43, 175–182. [Google Scholar] [CrossRef]
- Hepperle, M. Electric Flight Potential and Limitations. In Proceedings of the Conference: AVT-209 Workshop on Energy Efficient Technologies and Concepts Operation, Lisbon, Portugal, 22–24 October 2012. [Google Scholar]
- Dynamics, D.W.; Sabre, F. DCS World My Eagle Dynamics SA, 04 01 2016. Available online: https://www.digitalcombatsimulator.com/en/products/sabre/?SHOWALL_1=1 (accessed on 17 September 2021).
- Schaefer, W.S.; Inderhees, L.J.; Moynes, J.F. Flight Control Actuation System for the B-2 Advanced Technology Bomber. Sae Trans. 1991, 100, 284–295. [Google Scholar]
- Schaefer, W.S.; Inderhees, L.J.; Moynes, J.F. Flight Control Actuation System for the B-2 Advanced Technology Bomber. In Proceedings of the Aerospace Hydraulics and System, London, UK, 29–30 September 1993. [Google Scholar]
- Gaile, A.; Lue, Y. Electro Hydraulic Actuation (EHA) systems for primary flight control, landing gear and other type of actuation. In Proceedings of the IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016. [Google Scholar]
- Qu, S.; Fassbender, D.; Vacca, A.; Busquets, E. A high-efficient solution for electro-hydraulic actuators with energy regeneration capability. Energy 2021, 216, 119291. [Google Scholar] [CrossRef]
- Yao, J.; Wang, P.; Dong, Z.; Jiang, D.; Sha, T. A novel architecture of electro-hydrostatic actuator with digital distribution. Chin. J. Aeronaut. 2020, 34, 224–238. [Google Scholar] [CrossRef]
- Alle, N.; Hiremath, S.; Makaram, S.; Subramaniam, K.; Talukdar, A. Review on electro hydrostatic actuator for flight control. Int. J. Fluid Power 2016, 17, 125–145. [Google Scholar] [CrossRef]
- Steed, D.J. Direct drive actuation for primary flight control. In Proceedings of the Aerospace Hydraulics and Systems: International Conference, London, UK, 29–30 September 1993. [Google Scholar]
- Raval, R. Fairey direct drive valve and its influence on future aircraft systems. In Proceedings of the Aerospace Hydraulics and System, London, UK, 29–30 September 1993. [Google Scholar]
- Boehringer, W.E.; Verhoeven, T.; William, W. Mechanically Redundant Actuator Assembly. U.S. Patent 5,701,801, 30 December 1997. [Google Scholar]
- Chenoweth, C.; Fain, D.; Svensson, C. Redundant Actuator Development Program; Ames Research Center National Aern Autics & Space Administration: Seattle, DC, USA, 1975. [Google Scholar]
- Chenoweth, C.C.; Ryder, D.R. Redundancy of Hydraulic Flight Control Actuators; NASA Technical Documents; Boeing Commercial Airplane Company: Renton, DC, USA, 1976. [Google Scholar]
- Wang, D.Y.; Li, D.Q.; Chen, J.; Zheng, S.C. A Position Synchronization Control for Dual Redundant Electro-Mechanical Actuation in Flight Control System. IOP Conf. Series Mater. Sci. Eng. 2019, 638, 012007. [Google Scholar] [CrossRef]
- Husnić, Ž. Development of Aircraft Mechanical Systems and Mechatronics Modeling. In New Technologies, Development and Application III, Bosnia and Herzegovina; Springer: Cham, Switzerland, 2020; pp. 147–153. [Google Scholar]
- Kim, D.; Kim, Y.; Kim, S. Numerical Evaluation of Structural Safety of Linear Actuator for Flap Control of Aircraft Based on Airworthiness Standard. Aerospace 2021, 8, 104. [Google Scholar] [CrossRef]
- Ward, D. The all electric helicopter. In Proceedings of the IEEE 1983 National Aerospace and Electronics Conference, NAECON 1983, Dayton, OH, USA, 17 May 1983. [Google Scholar]
- Whitaker, R.; Harmon, A.; Haynes, L. A survivable fly-by-wire spoiler actuation system featuring non-flammable fluid, 8000 psi hydraulics and direct drive valves. In Proceedings of the IEEE 1985 National Aerospace and Electronics Conference, NAECON, Dayton, OH, USA, 20–24 May 1985. [Google Scholar]
- Holmdahl, M. Putting all new electric technology development to the test. In Proceedings of the IEEE 1983 National Aerospace and Electronics Conference, NAECON, Dayton, OH, USA, 17 May 1983. [Google Scholar]
- Leonard, J.B. A system look at the electromechanical actuation for primary flight control. In Proceedings of the IEEE 1983 National Aerospace and Electronics Conference, (NAECON), Dayton, OH, USA, 17 May 1983. [Google Scholar]
- Thompson, K.; Eitenmiller, K.; Hunter, L. Demonstration for electromechanical actuation technology for military air cargo transport. In Proceedings of the IEEE 1983 National Aerospace and Electronics Conference, NAECON, Dayton, OH, USA, 17 May 1983. [Google Scholar]
- Thompson, K.; Alden, R.; Hunter, L. Lockheed-Georgia and electric primary flight control systems. In Proceedings of the IEEE 1985 National Aerospace and Electronics Conference, Dayton, OH, USA, 20–24 May 1985. [Google Scholar]
- Thompson, K. Notes on the electric control of large aeroplanes. In Proceedings of the IEEE 1988 National Aerospace and Electronics Conference, NAECON, Dayton, OH, USA, 23–27 May 1988; Volume 3, pp. 19–24. [Google Scholar]
- Bradbury, G. Development of an advanced primary flight control electromechanical actuator. In Proceedings of the IEEE 1987 National Aerospace and Electronics Conference, Dayton, OH, USA, 18–22 May 1987. [Google Scholar]
- Alden, R. C-141 and C-130 Power-by-wire flight control systems. In Proceedings of the IEEE 1991 National Aerospace and Electronics Conference, Dayton, OH, USA, 20–24 May 1991. [Google Scholar]
- Smith, C.J. Electric actuation system duty cycle. In Proceedings of the IEEE 1991 National Aerospace and Electronics Conference, NAECON, Dayton, OH, USA, 20–24 May 1991; pp. 540–545. [Google Scholar]
- Jensen, S. Electro-Mechanical Actuator (EMA) Validation Program; Research Engineering Annual Report; NASA: Washington, DC, USA, 1998.
- Schwabacher, M.; Samuels, J.; Brownston, L. NASA integrated vehicle health management technology experiment for X-37. In Proceedings of the SPIE 4733, Component and Systems Diagnostics, Prognostics, and Health Management I, Orlando, FL, USA, 16 July 2002. [Google Scholar]
- Lupo, C.; Robertson, B.; Gafka, G. The X-38 V-201 Fin Fold Actuation Mechanism. In Proceedings of the 37th Aerospace Mechanisms Symposium, Houston, TX, USA, 19–21 May 2004. [Google Scholar]
- Hagen, J.; Moore, L.; Estes, J.; Layer, C. The X-38 V-201 Flap Actuator Mechanism. In Proceedings of the 37th Aerospace Mechanisms Symposium, Houston, TX, USA, 19–21 May 2004. [Google Scholar]
- Lin, Y.; Baumann, E.; Bose, D.; Beck, R.; Jenney, G. Tests and Techniques for Characterizing and Modeling X-43A Electromechanical Actuators; NASA Dryden Flight Research Center: Edwards, CA, USA, 2008.
- Gibbs, Y. NASA Armstrong Fact Sheet, Hyper-X Program, X-43A Flight Makes Aviation History. 28 February 2014 (Last Updated: 7 August 2017). Available online: https://www.nasa.gov/centers/armstrong/news/FactSheets/FS-040-DFRC.html (accessed on 30 April 2021).
- Jensen, S.C.; Jenney, G.D.; Dawson, D. Flight test experience with an electromechanical actuator on the F-18 Systems Research Aircraft. In Proceedings of the Digital Avionics Systems Conference, Philadelphia, PA, USA, 7–13 October 2000. [Google Scholar]
- Aten, M.; Whitley, C.; Towers, G.; Wheeler, P.; Clare, J.; Bradle, K. Dynamic performance of a matrix converter driven electro-mechanical actuator for an aircraft rudder. In Proceedings of the 2nd International Conference on Power Electronics, Machines and Drives, Edinburgh, UK, 31 March–2 April 2004. [Google Scholar]
- Imayavaramban, M.; Wheeler, P.W. Avoiding Regeneration with a Matrix Converter Drive. In Proceedings of the IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007. [Google Scholar]
- Davidson, R. Flight Control Design and Test of the Joint Unmanned Combat Air System (J-UCAS) X-45A. In Proceedings of the AIAA 3rd “Unmanned Unlimited” Technical Conference, Chicago, IL, USA, 20–23 September 2004. [Google Scholar]
- Cossar, C.; Kelly, L.; Whitley, C.; Maxwell, C.; Moorhouse, D. The Design of a Switched Reluctance Drive for Aircraft Flight Control Surface Actuation. In Proceedings of the IEE Colloquium on Electrical Machines and Systems for the More Electric Aircraft, London, UK, 9 November 1999. [Google Scholar]
- Atallah, K.; Caparrelli, F.; Bingham, C.; Schofield, N.; Howe, D.; Mellor, P.; Maxwell, C.; Moorhouse, D.; Whitley, C. Permanent magnet brushless drives for aircraft flight control surface actuation. In Proceedings of the IEEE Colloquium on Electrical Machines and Systems for the More Electric Aircraft, London, UK, 9 November 1999. [Google Scholar]
- Bennett, J.; Mecrow, B.; Jack, A.; Atkinson, D. A Prototype Electrical Actuator for Aircraft Flaps. IEEE Trans. Ind. Appl. 2020, 46, 915–921. [Google Scholar] [CrossRef]
- Bennett, J. Fault Tolerant Electromechanical Actuators for Aircraft; Newcastle University: Newcastle upon Tyne, UK, 2010. [Google Scholar]
- Bennett, J.; Mecrow, B.C.; Atkinson, D.J. Safety-Critical Design of Electromechanical Actuation Systems in Commercial Aircraft. IET Electr. Power Appl. 2010, 5, 37–47. [Google Scholar] [CrossRef]
- Prasad, B.; Sandeep, R.; Aravind, R.; Kumar, P. Optimum Design of a Fault Tolerant Linear Electromechanical Actuator for the Lower Stage Thrust Vector Control of a Satellite Launch Vehicle. In Proceedings of the 14th European Space Mechanisms & Tribology Symposium, Constance, Germany, 28–30 September 2011. [Google Scholar]
- Ganesh, B.; Jhanwar, R.; Kodeeswaran, M.; Kumar, P. Design of 25kW Redundant Linear Electro-Mechanical Actuator for Thrust Vector Control Applications. In Proceedings of the 1st International and 16th National Conference on Machines and Mechanisms, Roorkee, India, 18–20 December 2013. [Google Scholar]
- Reddy, K.; Nair, C.; Biju, S. System Engineering Studies on Induction of Redundant Electromechanical Engine Gimbal Control Actuation System in the Second Stage of Polar Satellite Launch Vehicle. In Advances in Systems Engineering. Lecture Notes in Mechanical Engineering; Springer: Singapore, 2021. [Google Scholar]
- Biryukov, G.P.; Manaenkov, E.N.; Fadeev, A.S. Tekhnologicheskoe Oborudovanie Otechestvennykh Raketno-Kosmicheskikh Kompleksov (Technological Equipment of Domestic Space-Rocket Complexes); Restart Publishing: Moscow, Russia, 2012; p. 599. [Google Scholar]
- Nosov, A. Power electromechanical drive based on planetary roller-screw gear of improved accuracy. Mach. Build. Eng. Mach. Sci. 2015, 22, 100–107. [Google Scholar]
- Ribeiro, R.; Jacobina, C.; Lima, A.; da Silva, E. A strategy for improving reliability of motor drive systems using a four-leg three-phase converter. In Proceedings of the APEC 2001, Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 4–8 March 2001. [Google Scholar]
- Suti, A.; Di Rito, G.; Galatolo, R. Fault-Tolerant Control of a Three-Phase Permanent Magnet Synchronous Motor for Lightweight UAV Propellers via Central Point Drive. Actuators 2021, 10, 253. [Google Scholar] [CrossRef]
- Kontarcek, A.; Bajec, P.; Nemec, M.; Ambrozic, V.; Nedeljkovic, D. Cost-Effective Three-Phase PMSM Drive Tolerant to Open-Phase Fault. IEEE Trans. Ind. Electron. 2015, 62, 6708–6718. [Google Scholar] [CrossRef]
- Qiao, G.; Liu, G.; Shi, Z.; Wang, Y.; Ma, S.; Lim, T. A review of electromechanical actuators for More/All Electric aircraft systems. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 232, 4128–4151. [Google Scholar] [CrossRef]
- Di Rito, G.; Luciano, B.; Borgarelli, N.; Nardeschi, M. Model-Based Condition-Monitoring and Jamming-Tolerant Control of an Electro-Mechanical Flight Actuator with Differential Ball Screws. Actuators 2021, 10, 230. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Previdi, F.; Scandella, M.; Pispola, G. Experimental Development of a Health Monitoring Method for Electro-Mechanical Actuators of Flight Control Primary Surfaces in More Electric Aircrafts. IEEE Access 2019, 7, 153618–153634. [Google Scholar] [CrossRef]
- Di Rito, G.; Schettini, F.; Galatolo, R. Model-based prognostic health-management algorithms for the freeplay identification in electromechanical flight control actuators. In Proceedings of the IEEE International Workshop on Metrology for AeroSpace, Rome, Italy, 20–22 June 2018. [Google Scholar]
- Yu, Z.; Niu, T.; Dong, H. A jam-tolerant electromechanical system. In Proceedings of the 16th International Conference on New Actuators, Bremen, Germany, 25–27 June 2018. [Google Scholar]
- Zhao, Y.; Huang, W.; Bu, F. Smart power flow node aimed at hybrid ac/dc power system for more electric aircraft. Electron. Lett. 2021, 57, 335–336. [Google Scholar] [CrossRef]
- Yujie, Z.; Liansheng, L.; Yu, P.; Datong, L. Health indicator extraction with phase current for power electronics of electro-mechanical actuator. Measurement 2020, 159, 107787. [Google Scholar]
- Enrico, Z.; Mengfei, F.; Zhiguo, Z.; Rui, K. Application of reliability technologies in civil aviation: Lessons learnt and perspectives. Chin. J. Aeronaut. 2019, 32, 143–158. [Google Scholar]
- Yuan, Y.; Zhang, T.; Lin, Z.; Zhao, Z.; Zhang, X. Actuator Fault Tolerant Control of Variable Cycle Engine Using Sliding Mode Control Scheme. Actuators 2021, 10, 24. [Google Scholar] [CrossRef]
- Mesalhy, O.; Elsayed, M.L.; Corona, J.J., Jr.; Kwarteng, A.A.; Kizito, J.P.; Leland, Q.H.; Chow, L.C. Study of a high-reliability dual-fan system for cooling aerospace electromechanical actuators. Therm. Sci. Eng. Prog. 2020, 18, 100540. [Google Scholar] [CrossRef]
- Kowalski, R.; Windelberg, J. Anisotropy Identification for electromechanical flight actuators with sensorless rotor angle detection. IEEE Trans. Transp. Electrif. 2020, 6, 1448–1456. [Google Scholar] [CrossRef]
- Bucci, G.; Ciancetta, F.; Fiorucci, E.; Mari, S. Test platform for electronic control units of high-performance safety-critical multi actuator systems. Int. J. Electr. Comput. Eng. 2020, 10, 4053–4072. [Google Scholar] [CrossRef]
- Wang, L.; Mare, J.; Fu, Y.; Haita, Q. Force Equalization for Redundant Active/Active Position Control System involving Dissimilar Technology Actuators. In Proceedings of the 8th JFPS International Symposium on Fluid Power, Okinawa, Japan, 25–28 October 2011. [Google Scholar]
- Wang, L. Force Equalization for Active/Active Redundant Actuation System Involving Servo-hydraulic and Electromechanical Technologies. Ph.D. Thesis, Université de Toulouse, Institut National des Sciences Appliquées, Toulouse, France, 2012. [Google Scholar]
- Wang, L.; Maré, J.-C. A force equalization controller for active/active redundant actuation system involving servo-hydraulic and electro-mechanical technologies. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2014, 228, 1768–1787. [Google Scholar] [CrossRef]
- Hoffman, J.R. Passive Load Testing for Evaluation of Electromechanical Actuators; Air Force Institute of Technology: Fairborn, OH, USA, 2018. [Google Scholar]
- Wroble, D. Force Fight Study in a Dual Electromechanical Actuator Configuration. Ph.D. Dissertation, University of Dayton, Dayton, OH, USA, 2017. [Google Scholar]
- Rehman, W.; Wang, X.; Wang, S.; Azhar, I. Motion Synchronization of HA/EHA System for a Large Civil Aircraft by Using Adaptive Control. In Proceedings of the IEEE Chinese Guidance, Navigation and Control Conference, Nanjing, China, 12–14 August 2016. [Google Scholar]
- Annaz, F.Y. Force equalisation in torque-summed electromechanical actuators. Measurement 2020, 156, 107600. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Annaz, F.Y.; Kaluarachchi, M.M. Progress in Redundant Electromechanical Actuators for Aerospace Applications. Aerospace 2023, 10, 787. https://doi.org/10.3390/aerospace10090787
Annaz FY, Kaluarachchi MM. Progress in Redundant Electromechanical Actuators for Aerospace Applications. Aerospace. 2023; 10(9):787. https://doi.org/10.3390/aerospace10090787
Chicago/Turabian StyleAnnaz, Fawaz Yahya, and Malaka Miyuranga Kaluarachchi. 2023. "Progress in Redundant Electromechanical Actuators for Aerospace Applications" Aerospace 10, no. 9: 787. https://doi.org/10.3390/aerospace10090787
APA StyleAnnaz, F. Y., & Kaluarachchi, M. M. (2023). Progress in Redundant Electromechanical Actuators for Aerospace Applications. Aerospace, 10(9), 787. https://doi.org/10.3390/aerospace10090787