
What Matters in the Effectiveness of Airborne Collision Avoidance Systems? Monte Carlo Simulation of Uncertainties for TCAS II and ACAS Xa


Abstract
:1. Introduction
- What is the added value of MC simulation of uncertainties in ACAS performance?
- Given the various types of uncertainties in encounters, sensor error, and pilot performance, what matters in the effectiveness of ACAS performance?
2. Background
2.1. Airborne Collision Avoidance Systems
2.2. Uncertainties Influencing ACAS Effectiveness
- It must be able to function effectively for a large number of encounter geometries;
- It must be robust against sensor errors in the ACAS input; and
- It must be able to handle variability in pilot response to ACAS RAs.
2.2.1. Encounter Geometries
2.2.2. Sensor Errors
2.2.3. Pilot Response
- An analysis of downlinked TCAS RA’s in recorded radar data by the TCAS RA Monitoring System (TRAMS) for the years 2008–2016 is presented in [28]. The relevant TRAMS data concern the terminal area of 20 large airports in the US. The analysis considered encounters where the first RA was Climb or Descend, based on a set of 80,955 encounters. Excluding parallel approach encounters, the overall response probability found in this data set is 0.62 overall, 0.58 for climb RAs, and 0.69 for descend RAs. This dataset was used for the development of a Bayesian network model for pilot response to resolution advisories [28].
- In [29] the pilot responses to 1176 downlinked RAs in European airspace were analyzed. Using analysis Method B from [30], which includes a category for weak responses, it was found that initial RAs were not followed or reacted to in the opposite sense in 10% of the cases at 8 s after the RA. For Climb or Descend RAs, these cases occurred more frequently: 27% of the cases. Weak responses (the pilot has made an adjustment in vertical speed in the required direction, but it is insufficient in vertical speed or acceleration to fulfil the requirement) occurred in 31% of the cases. The compliance with subsequent RAs was found to be considerably better than for initial RAs.
- A survey was conducted to analyze the frequency of RAs experienced by pilots and cases where RAs were not followed [1]. A total of 3800 pilots from 95 countries participated in the survey. A share of 36.5% of the respondents indicated that they had experienced one or more RAs is the last five years. A part of 14.7% of the pilots reported that they had been in a situation where it was not possible to follow an RA, or an RA was not precisely followed. The most important reasons indicated for not following an RA were “decision not to follow due to visual acquisition and/or avoidance of the conflicting traffic” (45%), “short duration RA (RA terminated before a response could be taken)” (15%), “proximity to the ground” (11%). Based on the survey data it was estimated that around 11% of RAs are not followed.
2.3. Operational Validation Studies for ACAS
3. Methods
3.1. Encounter Generation
3.1.1. Aircraft Trajectories
- Straight trajectories, where and .
- Trajectories with a vertical rate change, where the speed in the vertical plane consists of three phases: an initial vertical rate , then changing with acceleration from time , and a final vertical rate :Here the sign function assures that the vertical rate is either increased or decreased in line with the difference between the initial and final vertical rates.
- Trajectories with a horizontal turn, where the size of the aircraft groundspeed is constant and the course consists of three phases: an initial course , then turning with rate of turn from time , and final course , where is the duration of a turn depending on the initial and final courses, and the rate of turn:
- Trajectories with both a vertical rate change and horizontal turn, which is a combination of cases 2 and 3, assuming independent maneuvering in the horizontal and vertical planes.
3.1.2. Sets of Encounters
- The altitude of aircraft i at CPA is ft (flight level 120). This is a typical altitude in a terminal maneuvering area (TMA) where aircraft may be climbing, descending, turning, and levelling off.
- The course of aircraft i is always deg. The course of aircraft j at time is in the interval deg.
- The ground speeds of both aircraft are in the interval knots.
- The following vertical speed regimes are used: level flight with , climb with fpm, descent with fpm.
- There is no wind.
- Each encounter starts at time s and ends at time s, implying a total duration of 90 s.
- NMAC encounters: ft and ft.
- No NMAC encounters: ft and ft.
- Aircraft i: level (25%), continuous climb (12.5%), continuous climb (12.5%), level to climb (12.5%), level to descend (12.5%), climb to level (12.5%), descend to level (12.5%);
- Aircraft j: level to climb (25%), level to descend (25%), climb to level (25%), descend to level (25%).
- Aircraft i: straight (50%), left turn (25%), right turn (25%);
- Aircraft j: left turn (50%), right turn (50%).
3.2. Simulation Scenarios
3.2.1. Simulation Environment
3.2.2. ACAS Equipment and Surveillance Data
- TCAS II. Both aircraft in an encounter are equipped with TCAS II v7.1. This is the current standard ACAS used in commercial civil aviation as defined in [3]. The C++ library of the TCAS II algorithms stem from InCAS version 3.3. It was developed by the MITRE Corporation and subsequently adjusted for EUROCONTROL by Evosys to accommodate version 7.1.
- ACAS Xa. Both aircraft in an encounter are equipped with ACAS Xa. This a newly developed ACAS for commercial civil aviation developed in the ACAS X program as defined in [5,6]. The C++ library of the ACAS Xa algorithms was developed by NTT-Data in cooperation with NLR for EUROCONTROL. It is based on the algorithms in the MOPS [5] plus some changes as part of the continuing ACAS Xa development; it is not yet the version of the latest update of the MOPS [6].
3.2.3. Sensor Errors
- E0: There are no sensor errors; altitude, slant range and bearing are exactly known.
- E1: There are sensor errors according to the standard settings described above.
- E2: There are only biases in the pressure altitude, while there are no errors in the other components.
- E3: There are sensor errors according to the standard settings described above, except for the bias in the pressure altitude, which is absent.
3.2.4. Pilot Response Variability
- There is a probability that the pilot responds to an initial RA.
- There is a conditional probability that the pilot responds to a subsequent RA given that the pilot responded to a previous RA.
- There is a conditional probability that the pilot responds to a subsequent RA given that the pilot did not respond to a previous RA.
- The response delay is composed of a constant preparation delay of 2.5 s for initial RAs only, and a stochastic action delay chosen from a lognormal distribution [34] with a mean of 2.5 s and a standard deviation of 1.5 s for any RA. This implies that the mean delay is 5 s for initial RAs and 2.5 s for subsequent RAs.
- The vertical acceleration applied by the pilot is chosen from a lognormal distribution with a mean of 0.25 g or 0.35 g (for reversal/increase RAs) and a standard deviation of 0.04 g.
- PP: Both aircraft have standard (deterministic) pilot response.
- PN: AC1 has standard (deterministic) pilot response, while AC2 has no pilot response.
- P1: Both aircraft have pilot response with stochastic delay and acceleration, and with response probability parameters , , and . This represents a “stubborn” pilot who sticks to an initial decision to respond or not.
- P2: Both aircraft have pilot responses with stochastic delay and acceleration, and with response probability parameters , , and . This represents a “reconciliating” pilot who may adapt the response mode.
- P3: Both aircraft have pilot responses with stochastic delay and acceleration, and they always respond to RAs (, , ).
3.3. Simulation and P(NMAC) Estimation
3.3.1. Simulation Runs
- Deterministic simulation. In these simulations all settings are chosen to represent deterministic scenarios. Each encounter is simulated once, meaning that there are simulation runs per set.
- Monte Carlo simulation. These simulations include one or more settings that imply stochastic behavior in the scenarios. Each encounter is simulated times using different realizations of the stochastic variables. This implies that there are simulation runs per set.
3.3.2. Altimetry Error Postprocessing
4. Results
4.1. Sensor Errors and Encounter Variability
4.2. Altimetry Error Postprocessing
4.3. Resolved versus Induced NMAC Events
4.4. Pilot Performance
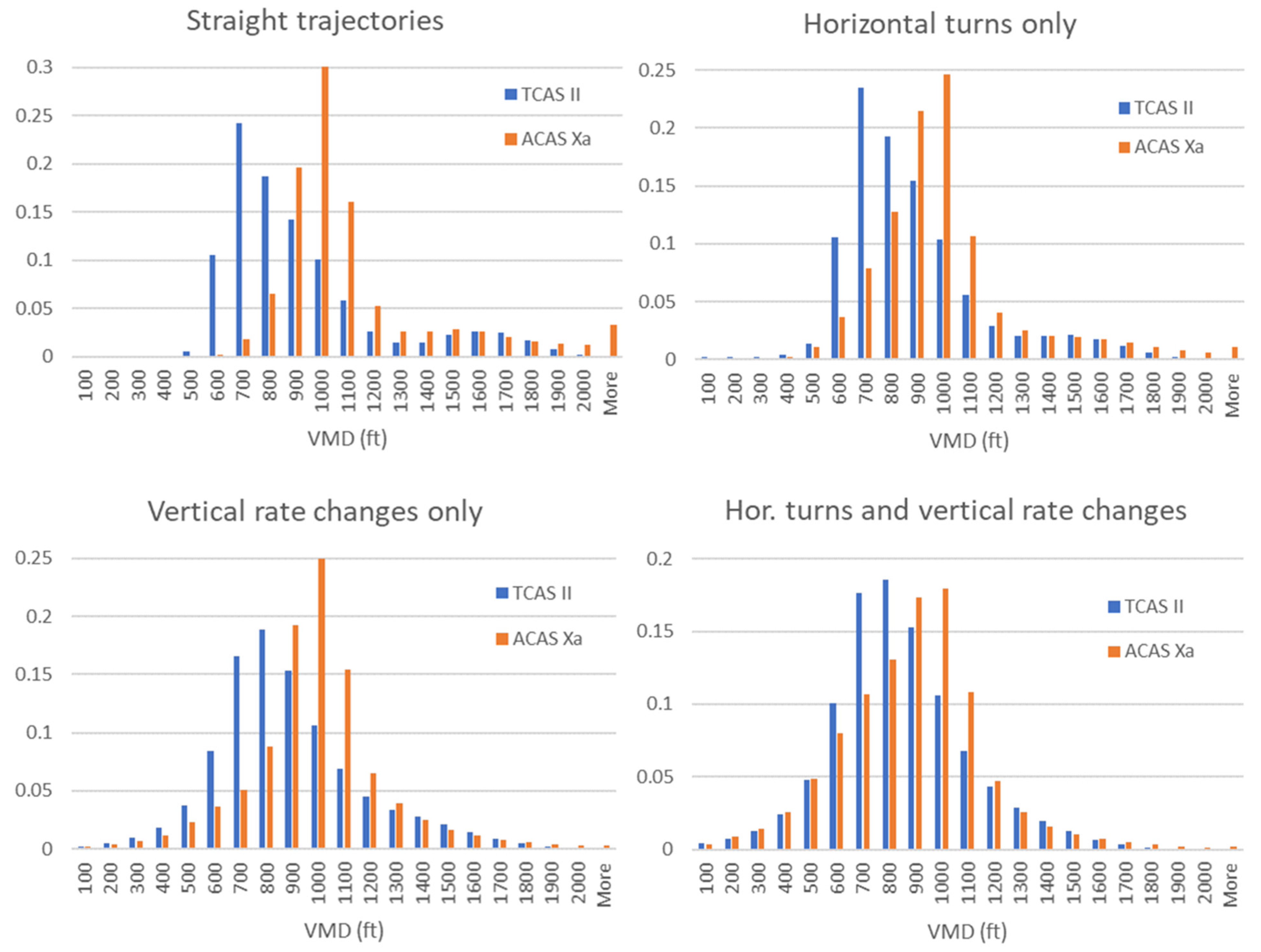
- For encounters with straight trajectories, no NMAC events are found for ACAS Xa, while there is a considerable increase in the P(NMAC) estimate for TCAS II. However, the numbers of simulated NMACs are small.
- For encounters including vertical rate changes and/or horizontal turns, the P(NMAC) estimates increase for both TCAS II and ACAS Xa. The relative increases are consistently larger for ACAS Xa (34% to 600%) than for TCAS II (13% to 30%). So, in these cases, ACAS Xa is found to be less robust for the inclusion of timing and acceleration variability in pilot response. Nevertheless, the P(NMAC) estimates remain smaller for ACAS Xa, except for encounters with both vertical rate changes and horizontal turns.
- The P(NMAC) estimates all lie in the range of [1.03 × 10−2, 2.11 × 10−2]. A priori is it known that the minimum of P(NMAC) is 1 × 10−2, since the probability of not responding was set as 0.1 per pilot and the probabilities per aircraft are modelled as independent. These probabilities are all considerably larger than those in the reference case with a standard ICAO response model, which lie in the range [0, 3.93 × 10−3] (see PP results in Table 5).
- The P(NMAC) estimates are smaller for ACAS Xa than for TCAS II, except for encounters that include both vertical rate changes and horizontal turns.
- The P(NMAC) estimates lie in the range [1.20 × 10−3, 9.47 × 10−3]. They are consistently smaller than those of P1 and consistently larger than those of the standard PP.
- The P(NMAC) estimates are smaller for TCAS II in the cases of straight trajectories as well as the cases with both vertical rate changes and horizontal turns. In the other two sets, the P(NMAC) estimates are smaller for ACAS Xa.
4.5. Comparison of Variability Contributions
5. Discussion
6. Conclusions and Recommendations
- The scope of the use case has been limited, such that no final conclusions on the performance of ACAS Xa versus TCAS II are drawn. It is advised to extend the scope as part of a future validation study for the latest version of ACAS Xa [6].
- The assumption underlying altimetry error postprocessing, namely that VMD equals deterministically simulated VMD plus a (limited) altimetry error, does not consistently hold. MC simulation shows that the butterfly effect of non-linear dynamical systems exists; limited altimetry errors can lead to large VMD differences for the same encounter. It has been shown that AEP-based P(NMAC) estimates are often lower than the estimates achieved by MC simulation for the same altimetry error distribution. It is advised to use MC simulation of altimetry errors in future validation studies.
- Pilot response probability has the largest impact on overall ACAS effectiveness, and it is much larger than performance differences between TCAS II and ACAS Xa. Advanced pilot models with different response probabilities for initial and subsequent RAs lead to different results for ACAS effectiveness. It is advised to include advanced types of pilot response models in future validation studies.
- The obtained results show that AEP-based biases in P(NMAC) estimates are larger for ACAS Xa than for TCAS II, and that ACAS Xa can be more sensitive to sensor errors than TCAS II. It is possible that sensor errors neglected in the optimization process of ACAS Xa have led to more specific and less robust performance in its alerting logic, while TCAS II uses generic rules. It is advised to perform more detailed analyses of the generalization and robustness of ACAS in future operational validation studies, so as to assure trustworthy AI performance in ACAS Xa.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- EUROCONTROL. Network Manager Operational Safety Study: TCAS RA Not Followed; EUROCONTROL: Brussels, Belgium, 2017.
- Drozdowski, S. Traffic Alert and Collision Avoidance System (TCAS)—Selected Statistical and Performance Data in Core European Airspace; EUROCONTROL: Brussels, Belgium, 2021.
- EUROCAE. Minimum Operational Performance Standards for Traffic Alert and Collision Avoidance System II (TCAS II), Volume I, ED-143; EUROCAE: Malakoff, France, 2008. [Google Scholar]
- ICAO. Annex 10 Aeronautical Telecommunications, Volume IV Surveillance and Collision Avoidance Systems; International Civil Aviation Organization: Montreal, QC, Canada, 2014. [Google Scholar]
- EUROCAE. Minimum Operational Performance Standards for Airborne Collision Avoidance System X (ACAS X) (ACAS Xa AND ACAS Xo), ED-256; EUROCAE: Saint-Denis, France, 2018. [Google Scholar]
- EUROCAE. Minimum Operational Performance Standards for Airborne Collision Avoidance System X (ACAS X) (ACAS Xa AND ACAS Xo), ED-256A; EUROCAE: Saint-Denis, France, 2023. [Google Scholar]
- Kochenderfer, M.J.; Edwards, M.W.M.; Espindle, L.P.; Kuchar, J.K.; Griffith, J.D. Airspace Encounter Models for Estimating Collision Risk. J. Guid. Control Dyn. 2010, 33, 487–499. [Google Scholar] [CrossRef]
- Dean, G.; Mosteiro, S.H.; Huck, V.; Irvine, R.; Phu, D.; Shaw, C.; Melgar, A.S.; Howell, R.; Hutchinson, H.; Painter, D. Collision Avoidance Fast-Time Evaluator (CAFE) Revised Encounter Model for Europe (CREME); SESAR Joint Undertaking: Brussels, Belgium, 2022. [Google Scholar]
- FAA. Post-FRAC Operational Validation Report; ACAS-RPT_18_018_V1R0, DO-385 V1R0; Federal Aviation Administration: Washington, DC, USA, 2018.
- EUROCONTROL. European Airborne Collision Avoidance System (ACAS) Xa Change Proposal (CP)1 Validation Report; EUROCONTROL: Brussels, Belgium, 2022.
- Stroeve, S.H.; Blom, H.A.P.; Medel, C.H.; Daroca, C.G.; Cebeira, A.A.; Drozdowski, S. Modeling and simulation of intrinsic uncertainties in validation of collision avoidance systems. J. Air Transp. 2020, 28, 173–183. [Google Scholar] [CrossRef]
- EUROCONTROL. CAVEAT Tool. Available online: https://skybrary.aero/articles/caveat-tool (accessed on 5 June 2023).
- Muñoz, C.; Narkawicz, A.; Chamberlain, J. A TCAS-II resolution advisory detection algorithm. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar]
- EUROCONTROL. ACAS Guide, Edition 4.1; EUROCONTROL: Brussels, Belgium, 2022.
- EUROCAE. TCAS II Collision Avoidance System (CAS) Requirements Specification, Volume II ED-143; EUROCAE: Malakoff, France, 2008. [Google Scholar]
- Kochenderfer, M.J.; Holland, J.E.; Chryssanthacopoulos, J.P. Next-generation airborne collision avoidance system. Linc. Lab. J. 2012, 19, 17–33. [Google Scholar]
- Kochenderfer, M.J. Decision Making under Uncertainty; The MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction, 2nd ed.; MIT Press: Cambridge, MA, USA, 2020. [Google Scholar]
- Holland, J.E.; Kochenderfer, M.J.; Olson, W.A. Optimizing the next generation collision avoidance system for safe, suitable, and acceptable operational performance. In Proceedings of the Tenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2013), Chicago, IL, USA, 10–13 June 2013. [Google Scholar]
- Kochenderfer, M.J.; Espindle, L.P.; Kuchar, J.K.; Griffith, J.D. A comprehensive aircraft encounter model of the National Airspace System. Linc. Lab. J. 2008, 17, 41–53. [Google Scholar]
- Kochenderfer, M.J.; Espindle, L.P.; Kuchar, J.K.; Griffith, J.D. Correlated Encounter Model for Cooperative Aircraft in the National Airspace System Version 1.0; Project report ATC-344; MIT Lincoln Laboratory: Lexington, MA, USA, 2008. [Google Scholar]
- Kochenderfer, M.J.; Kuchar, J.K.; Espindle, L.P.; Griffith, J.D. Uncorrelated Encounter Model of the National Airspace System Version 1.0; Project report ATC-345; Lincoln Laboratory, MIT: Lexington, MA, USA, 2008. [Google Scholar]
- Weinert, A.J.; Harkleroad, E.P.; Griffith, J.; Edwards, M.W.; Kochenderfer, M.J. Uncorrelated Encounter Model of the National Airspace System, Version 2.0; Lincoln Laboratory, MIT: Lexington, MA, USA, 2013. [Google Scholar]
- Underhill, N.K.; Harkleroad, E.P.; Guendel, R.E.; Weinert, A.J.; Maki, D.E.; Edwards, M.W.M. Correlated Encounter Model for Cooperative Aircraft in the National Airspace System; Project report ATC-440; MIT Lincoln Laboratory: Lexington, MA, USA, 2018. [Google Scholar]
- ICAO. Procedures for Air Navigation Services—Aircraft Operations: Volume I Flight Procedures, Doc 8168; International Civil Aviation Organization: Montreal, QC, Canada, 2016. [Google Scholar]
- BFU. Investigation Report; AX001-1-2/02; Bundesstelle für Flugunfalluntersuchung: Braunschweig, Germany, 2004. [Google Scholar]
- EASA. Annual Safety Review 2022; European Union Aviation Safety Agency: Collogne, Germany, 2022.
- Londner, E.H.; Moss, R.J. Bayesian Network Model of Pilot Response to Collision Avoidance System Resolution Advisories. J. Air Transp. 2018, 26, 171–182. [Google Scholar] [CrossRef]
- Michalski, M.; Drozdowski, S. The Assessment of Pilot Compliance with TCAS RAs, TCAS Mode Selection and Serviceability Using ATC Radar Data; EUROCONTROL: Brussels, Belgium, 2022.
- IATA; EUROCONTROL. Performance Assessment of Pilot Compliance with Traffic Collision Avoidance System Advisories Using Flight Data Monitoring—Guidance Material; IATA: Montreal, QC, Canada, 2022.
- Cloerec, A. Final Report on the Analysis of Airborne Recorded Data and Pilot Model Specification; ASARP/WP/19/D; ASARP Project; EUROCONTROL: Brussels, Belgium, 2005.
- EUROCONTROL. CAVEAT 3.8.1 User Manual; EUROCONTROL: Brussels, Belgium, 2022.
- Stroeve, S.H.; Villanueva-Cañizares, C.J. CAVEAT TAM—Models and Algorithms: Development of a Collision Avoidance Evaluation and Analysis Tool; NLR-CR-2023-285; Royal Netherlands Aerospace Centre NLR: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Van der Linden, W.J. A lognormal model for response times on test items. J. Educ. Behav. Stat. 2006, 31, 181–204. [Google Scholar] [CrossRef]
- Owen, A. Simple Monte Carlo. In Monte Carlo Theory, Methods and Examples; 2013; Available online: https://artowen.su.domains/mc/ (accessed on 5 June 2023).
- McLaughlin, M.P.; Zeitlin, A.D. Safety Study of TCAS II for Logic Version 6.04; DOT/FAA/RD-92/22; Federal Aviation Administration: Washington, DC, USA, 1992.
- EUROCAE. Minimum Aviation System Performance Specification (MASPS) for Flight Guidance System (FGS) Coupled to Traffic Alert and Collision Avoidance System (TCAS), ED-224; EUROCAE: Malakoff, France, 2014. [Google Scholar]
- EUROCONTROL. Autopilot/Flight Director (AP/FD) TCAS Capability. 2023. Available online: https://www.skybrary.aero/articles/autopilotflight-director-apfd-tcas-capability (accessed on 7 June 2023).
- EASA. EASA Concept Paper: First Usable Guidance for Level 1&2 Machine Learning Applications; European Aviation Safety Agency: Cologne, Germany, 2023.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vertical Rate Change | Horizontal Turn | ACAS | P(NMAC): Point Estimate and 95% Confidence Interval | |||||
|---|---|---|---|---|---|---|---|---|
| No Sensor Errors | Only Altimetry Bias | All Sensor Errors | ||||||
| No | No | TCAS II | 0 | [0, 6.0 × 10−5] | 2 × 10−6 | [0, 4.8 × 10−6] | 1 × 10−6 | [0, 3.0 × 10−6] |
| ACAS Xa | 0 | [0, 6.0 × 10−5] | 0 | [0, 3.0 × 10−6] | 0 | [0, 3.0 × 10−6] | ||
| No | Yes | TCAS II | 2.04 × 10−3 | ±4.0 × 10−4 | 2.07 × 10−3 | ±8.9 × 10−5 | 2.08 × 10−3 | ±8.9 × 10−5 |
| ACAS Xa | 0 | [0, 6.0 × 10−5] | 6.60 × 10−5 | ±1.6 × 10−5 | 4.70 × 10−5 | ±1.3 × 10−5 | ||
| Yes | No | TCAS II | 1.06 × 10−3 | ±2.9 × 10−5 | 1.76 × 10−3 | ±8.2 × 10−5 | 1.80 × 10−3 | ±8.3 × 10−5 |
| ACAS Xa | 7.20 × 10−4 | ±2.4 × 10−4 | 1.59 × 10−3 | ±7.8 × 10−5 | 1.60 × 10−3 | ±7.8 × 10−5 | ||
| Yes | Yes | TCAS II | 3.14 × 10−3 | ±4.9 × 10−4 | 3.86 × 10−3 | ±1.2 × 10−4 | 3.93 × 10−3 | ± 1.2 × 10−4 |
| ACAS Xa | 1.96 × 10−3 | ±3.9 × 10−4 | 4.04 × 10−3 | ±1.2 × 10−4 | 3.43 × 10−3 | ± 1.2 × 10−4 | ||
| Vertical Rate Change | Horizontal Turn | ACAS | P(NMAC) Estimates | |||
|---|---|---|---|---|---|---|
| Simulated Biases (E2) Point Estimate/95% Conf. Int. | Postprocessed Biases (E0) Estimate/Rel. Diff | |||||
| No | No | TCAS II | 2 × 10−6 | [0, 4.77 × 10−6 ] | 4.93 × 10−13 | - |
| ACAS Xa | 0 | [0, 3.00 × 10−6 ] | 3.50 × 10−15 | - | ||
| No | Yes | TCAS II | 2.07 × 10−3 | [1.98 × 10−3, 2.16 × 10−3] | 1.96 × 10−3 | −5.3% |
| ACAS Xa | 6.60 × 10−5 | [5.01 × 10−5, 8.19 × 10−5] | 4.04 × 10−5 | −38.8% | ||
| Yes | No | TCAS II | 1.76 × 10−3 | [1.67 × 10−3, 1.84 × 10−3] | 1.63 × 10−3 | −7.4% |
| ACAS Xa | 1.59 × 10−3 | [1.51 × 10−3, 1.67 × 10−3] | 1.32 × 10−3 | −17.0% | ||
| Yes | Yes | TCAS II | 3.86 × 10−3 | [3.74 × 10−3, 3.99 × 10−3] | 3.65 × 10−3 | −5.4% |
| ACAS Xa | 4.04 × 10−3 | [3.91 × 10−3, 4.16 × 10−3] | 3.66 × 10−3 | −9.4% | ||
| Vertical Rate Change | Horizontal Turn | ACAS | P(NMAC) Estimates | |||
|---|---|---|---|---|---|---|
| Simulated Biases (E1) Point Estimate/95% Conf. Int. | Postprocessed Biases (E3) Estimate/Rel. Diff | |||||
| No | No | TCAS II | 1.00 × 10−6 | [0, 2.96 × 10−6] | 8.06 × 10−13 | - |
| ACAS Xa | 0 | [0, 3.00 × 10−6] | 9.46 × 10−13 | - | ||
| No | Yes | TCAS II | 2.08 × 10−3 | [1.99 × 10−3, 2.17 × 10−3] | 1.96 × 10−3 | −5.8% |
| ACAS Xa | 4.70 × 10−5 | [3.36 × 10−5, 6.04 × 10−5] | 3.47 × 10−5 | −26.2% | ||
| Yes | No | TCAS II | 1.80 × 10−3 | [1.72 × 10−3, 1.88 × 10−3] | 1.70 × 10−3 | −5.6% |
| ACAS Xa | 1.60 × 10−3 | [1.52 × 10−3, 1.68 × 10−3] | 1.38 × 10−3 | −13.8% | ||
| Yes | Yes | TCAS II | 3.93 × 10−3 | [3.81 × 10−3, 4.05 × 10−3] | 3.60 × 10−3 | −8.4% |
| ACAS Xa | 3.43 × 10−3 | [3.32 × 10−3, 3.54 × 10−3] | 3.11 × 10−3 | −9.3% | ||
| Vertical Rate Change | Horizontal Turn | ACAS | P(NMAC) Estimates Point Estimate/95% Confidence Interval | P(NMAC) for No NMAC versus NMAC Enc. (%) | |||
|---|---|---|---|---|---|---|---|
| NMAC Encounters | No NMAC Encounters | ||||||
| No | No | TCAS II | 1 × 10−6 | [0, 3.0 × 10−6] | 0 | [0, 3.0 × 10−6] | 0% |
| ACAS Xa | 0 | [0, 3.0 × 10−6] | 0 | [0, 3.0 × 10−6] | - | ||
| No | Yes | TCAS II | 2.08 × 10−3 | ±8.9 × 10−5 | 1.68 × 10−4 | ±2.5 × 10−5 | 8.1% |
| ACAS Xa | 4.70 × 10−5 | ±1.3 × 10−5 | 1.00 × 10−5 | ±6.2 × 10−6 | 21.3% | ||
| Yes | No | TCAS II | 1.80 × 10−3 | ±8.3 × 10−5 | 8.50 × 10−5 | ±1.8 × 10−5 | 4.7% |
| ACAS Xa | 1.60 × 10−3 | ±7.8 × 10−5 | 1.22 × 10−4 | ±2.2 × 10−5 | 7.6% | ||
| Yes | Yes | TCAS II | 3.93 × 10−3 | ±1.2 × 10−4 | 3.38 × 10−4 | ±3.6 × 10−5 | 8.6% |
| ACAS Xa | 3.43 × 10−3 | ±1.2 × 10−4 | 4.85 × 10−4 | ±4.3 × 10−5 | 14.1% | ||
| Vertical Rate Change | Horizontal Turn | ACAS | P(NMAC): Point Estimate and 95% Confidence Interval | |||
|---|---|---|---|---|---|---|
| Standard Response for Two Aircraft (PP) | Standard Response for AC1 Only (PN) | |||||
| No | No | TCAS II | 1 × 10−6 | [0, 3.0 × 10−6] | 4.78 × 10−3 | ±1.4 × 10−4 |
| ACAS Xa | 0 | [0, 3.0 × 10−6] | 2.24 × 10−3 | ±9.3 × 10−5 | ||
| No | Yes | TCAS II | 2.08 × 10−3 | ±8.9 × 10−5 | 1.06 × 10−2 | ±2.0 × 10−4 |
| ACAS Xa | 4.70 × 10−5 | ±1.3 × 10−5 | 1.03 × 10−2 | ±2.0 × 10−4 | ||
| Yes | No | TCAS II | 1.80 × 10−3 | ±8.3 × 10−5 | 2.13 × 10−2 | ±2.8 × 10−4 |
| ACAS Xa | 1.60 × 10−3 | ±7.8 × 10−5 | 1.53 × 10−2 | ±2.4 × 10−4 | ||
| Yes | Yes | TCAS II | 3.93 × 10−3 | ±1.2 × 10−4 | 3.33 × 10−2 | ±3.5 × 10−4 |
| ACAS Xa | 3.43 × 10−3 | ±1.2 × 10−4 | 3.98 × 10−2 | ±3.8 × 10−4 | ||
| Vertical Rate Change | Horizontal Turn | ACAS | P(NMAC): Point Estimate and 95% Confidence Interval | |||||
|---|---|---|---|---|---|---|---|---|
| Stoch. Pilot Model P1 | Stoch. Pilot Model P2 | Stoch. Pilot Model P3 | ||||||
| No | No | TCAS II | 1.11 × 10−2 | ±2.1 × 10−4 | 1.20 × 10−3 | ±6.8 × 10−5 | 1.80 × 10−5 | ±8.3 × 10−6 |
| ACAS Xa | 1.03 × 10−2 | ±2.0 × 10−4 | 1.44 × 10−3 | ±7.4 × 10−5 | 0 | [0, 3.0 × 10−6] | ||
| No | Yes | TCAS II | 1.34 × 10−2 | ±2.3 × 10−4 | 3.89 × 10−3 | ±1.2 × 10−4 | 2.34 × 10−3 | ±9.5 × 10−5 |
| ACAS Xa | 1.19 × 10−2 | ±2.7 × 10−4 | 3.14 × 10−3 | ±1.1 × 10−4 | 2.82 × 10−4 | ±3.3 × 10−5 | ||
| Yes | No | TCAS II | 1.63 × 10−2 | ±2.5 × 10−4 | 4.66 × 10−3 | ±1.3 × 10−4 | 2.34 × 10−3 | ±9.5 × 10−5 |
| ACAS Xa | 1.54 × 10−2 | ±2.4 × 10−2 | 4.30 × 10−3 | ±1.3 × 10−4 | 2.14 × 10−3 | ±9.1 × 10−5 | ||
| Yes | Yes | TCAS II | 1.95 × 10−2 | ±2.1 × 10−4 | 7.61 × 10−3 | ±1.7 × 10−4 | 4.63 × 10−3 | ±1.3 × 10−4 |
| ACAS Xa | 2.11 × 10−2 | ±2.8 × 10−4 | 9.47 × 10−3 | ±1.9 × 10−4 | 4.89 × 10−3 | ±1.4 × 10−4 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stroeve, S. What Matters in the Effectiveness of Airborne Collision Avoidance Systems? Monte Carlo Simulation of Uncertainties for TCAS II and ACAS Xa. Aerospace 2023, 10, 952. https://doi.org/10.3390/aerospace10110952
Stroeve S. What Matters in the Effectiveness of Airborne Collision Avoidance Systems? Monte Carlo Simulation of Uncertainties for TCAS II and ACAS Xa. Aerospace. 2023; 10(11):952. https://doi.org/10.3390/aerospace10110952
Chicago/Turabian StyleStroeve, Sybert. 2023. "What Matters in the Effectiveness of Airborne Collision Avoidance Systems? Monte Carlo Simulation of Uncertainties for TCAS II and ACAS Xa" Aerospace 10, no. 11: 952. https://doi.org/10.3390/aerospace10110952
APA StyleStroeve, S. (2023). What Matters in the Effectiveness of Airborne Collision Avoidance Systems? Monte Carlo Simulation of Uncertainties for TCAS II and ACAS Xa. Aerospace, 10(11), 952. https://doi.org/10.3390/aerospace10110952