1. Introduction
Terrain curvature is an important topographic parameter that reflects the shape characteristics and concave–convex change in different orientations [
1,
2], and effects the distribution of the soil organic content [
3,
4]. It has significant application values in terrain analysis [
5,
6,
7,
8,
9], hydrology [
10,
11,
12,
13], soil [
14,
15,
16,
17], hazard [
18,
19,
20], and other fields [
21,
22,
23]. The curvature is related to the orientation and has different definitions of geometry and geology [
24].
For a long time, a variety of curvatures developed by researchers have been used to meet the requirements of practical applications [
25,
26,
27,
28,
29,
30], such as the mean curvature, maximum curvature, minimum curvature, plan curvature, profile curvature, tangential curvature, flow path curvature, and so on. Less acknowledged is the flow path curvature (
C), which is also known as the rotor curvature or streamline curvature [
31]. It measures the rate of the change of the flow paths along the horizontal direction, and describes the degree of twisting of the flow lines [
4,
32,
33,
34]. Although the flow path curvature was not considered in the complete classification system of curvatures constructed by Shary [
35] at first, it has been widely utilized in the theory of the electromagnetic field [
36]. For example, Pradhan and Guha [
37] discussed the effects of the flow path curvature on the downstream evolution of the three-dimensional flow field to accurately make the corrections of the field in the bifurcation model. Results showed that the flow path curvature is mainly responsible for generating the Dean-type secondary circulation and skewed velocity distributions. Pathak, et al. [
38] studied the impact of the flow path curvature on the flow field in the
k–ε turbulence model and validated the superiority of the improved model with this curvature. Yang and Tucker [
39] selected some widely used turbulence models to assess their performance affected by large flow path curvature and demonstrated that the proper corrections of the flow path curvature can reduce the large solution errors. It still has a few applications in other fields. For example, Tjerry and Fredsøe [
40] presented that the flow path curvature is another control factor of the geometry of a fully developed sand wave and certified that this curvature is necessary to determine the position of the maximum sediment transport under low riverbed shear stresses. Bagheri and Kabiri-Samani [
41] researched the simulation of the flow over the streamlined weirs based on numerical modeling and proved that a proper curvature of the streamlines can reduce the adverse flow situations and generate a favorable weir structure along the channels. Foroutan, et al. [
42] conducted the unsupervised classification of an arid mountainous area based on twenty-two digital elevation model (DEM) derivatives including the flow path curvature. Results demonstrated that this classification is conducive to the uniform division of the area and identification of debris, gravity, and wash slopes. Moreover, it may be beneficial to perform surface runoff simulation due to its impact on the flow velocity of water and surface sediment [
3], which will be the topic of our next research. The accuracy and reliability of flow path curvature are still worth exploring. Thus, in this paper, we consider this type of curvature in more detail.
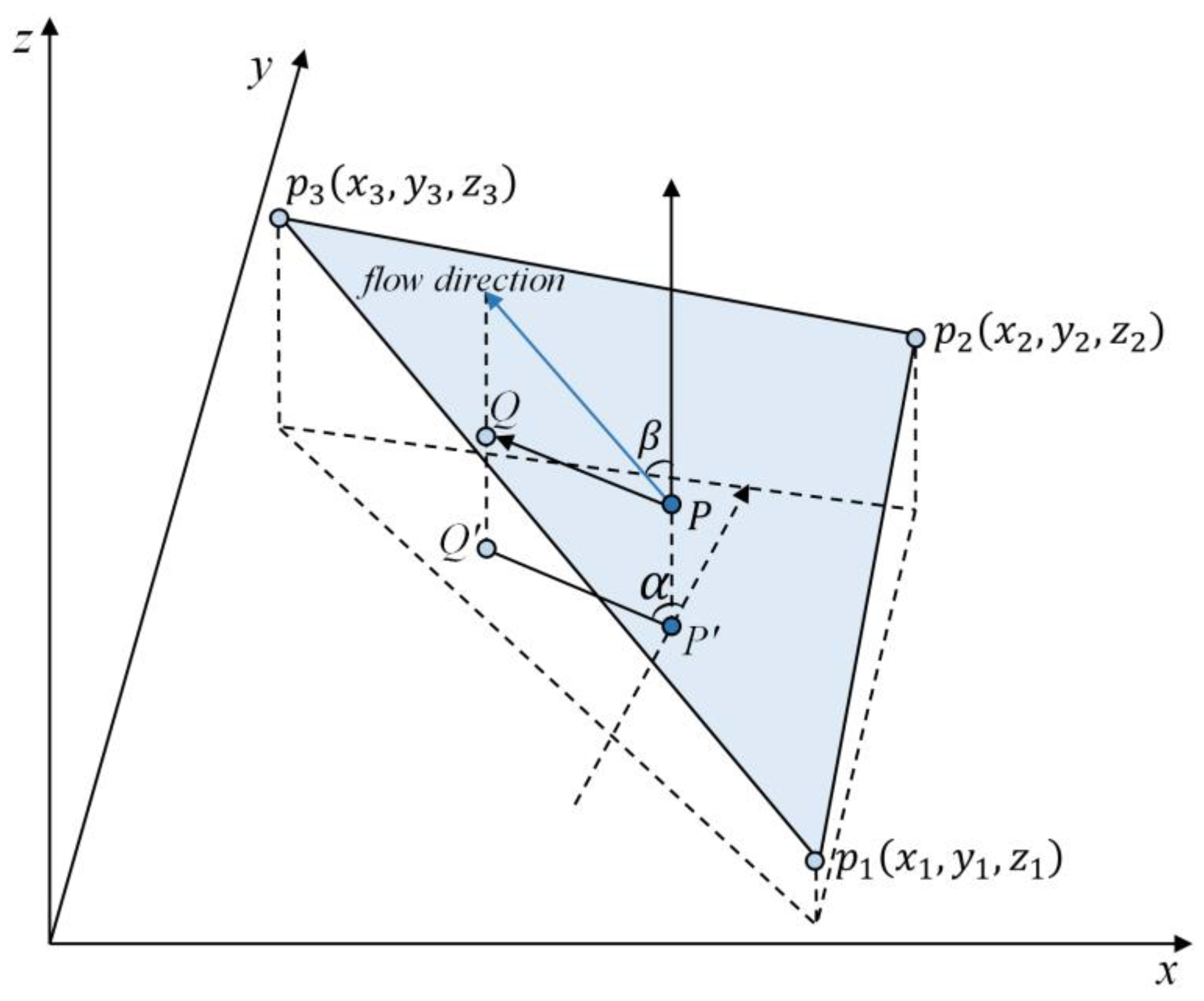
The terrain surface can be described solely by a continuous and single-valued representation
and here,
and
respectively, indicate the coordinates in the
direction and
direction, and
is the elevation. The flow path curvature is estimated by the first-order (
and
) and second-order partial derivatives (
,
and
). It can be defined as
(units:
m−1) by Shary [
26]. It is measuring the twist of flow lines. When it is larger than zero, flow lines rotate clockwise. When it is smaller than zero, flow lines rotate counterclockwise, otherwise the flow line does not swing along the straight line [
3,
42,
43]. The flow path curvature is often derived from the square-grid digital elevation model (DEM), which is valued for its simple structure and continuity in the representation of topographic surfaces.
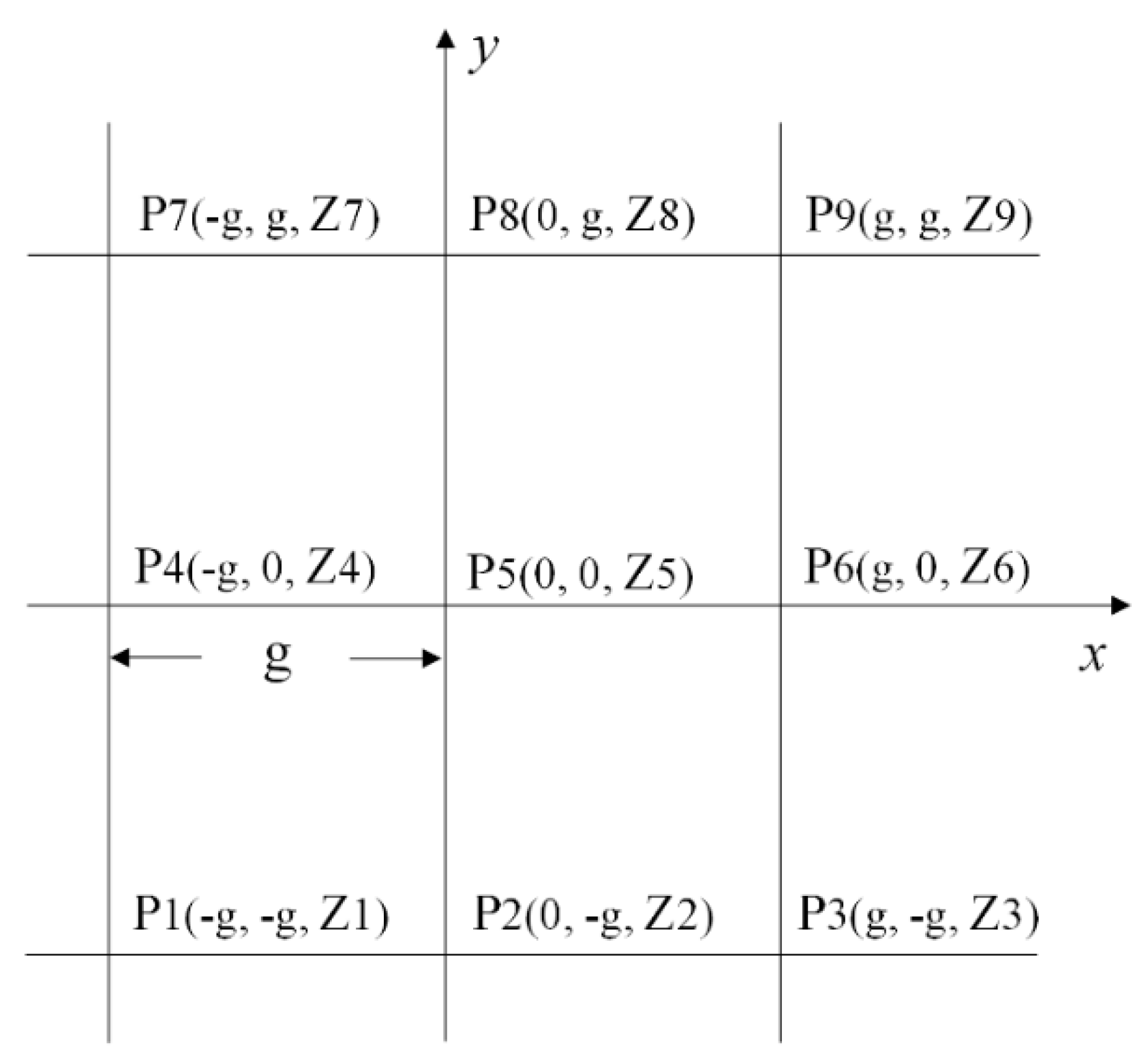
The commonly-used algorithms use the center grid cell and its eight surrounding grid cells based on a moving window of 3 × 3 to calculate the
C of the center grid cell. The elevation value of the nine grid cells is approximated by the differentiate operation or local fitting curve. For example, the method proposed by Evans [
44] uses the six-parameter second-order polynomial to represent the terrain surface, and derives different partial derivatives by the least-squares fitting algorithm to calculate
C. It has a high accuracy when considering the smoothing of the high-frequency noise of the DEM [
24,
45]. Under the above method, Zevenbergen and Thorne [
46] proposed a method which utilizes the partial nine-parameter fourth-order polynomial to describe the surface, and so the fitting curve can be passed through the nine grid cells and obtain the solely different partial derivatives for the
C calculation. Its aim was to enhance the accuracy of the different partial derivatives, but it has not achieved the desired results because it lacks the smoothing and denoising effect of DEM [
43]. The high-order polynomial interpolation method may result in incorrect topographic features [
24].
Because the general second-order surface does not pass through all of the nine grid cells, the method presented by Shary [
35] employs the constrained five-parameter second-order polynomial to fit the surface, and is also based on the least-squares fitting algorithm to derive the different partial derivatives for estimating
C. It is similar to the Evans algorithm, except for the different averaging processes. Considering the equidistant distribution characteristics of a regular grid, Moore, et al. [
47] proposed a difference method using the numerical differentiation to calculate partial derivatives for the
C estimation. It directly uses the elevation of the center grid cell and eight neighboring grid cells to derive the different partial derivatives for estimating
C. It is similar to the algorithm proposed by Zevenbergen and Thorne [
46], but they calculated the second-order partial derivatives using different methods. In order to improve accuracy and adaptability to the different terrain surfaces, Shary, Sharaya and Mitusov [
30] proposed the modified Evans–Young method, which is based on the Evans algorithm, to calculate the curvature after using filters to handle the center grid cell. The above mentioned methods utilize the local terrain surface representation to derive the partial derivatives by the different interpolation algorithm and a moving window. They are more helpful to consistently extract the local curvature, but are not suitable for complex topography regions for higher-scale problems in terrain analysis [
48]. Moreover, the accuracy of these algorithms is affected by interpolation errors, and there are difficulties in selecting suitable algorithms for the applications.
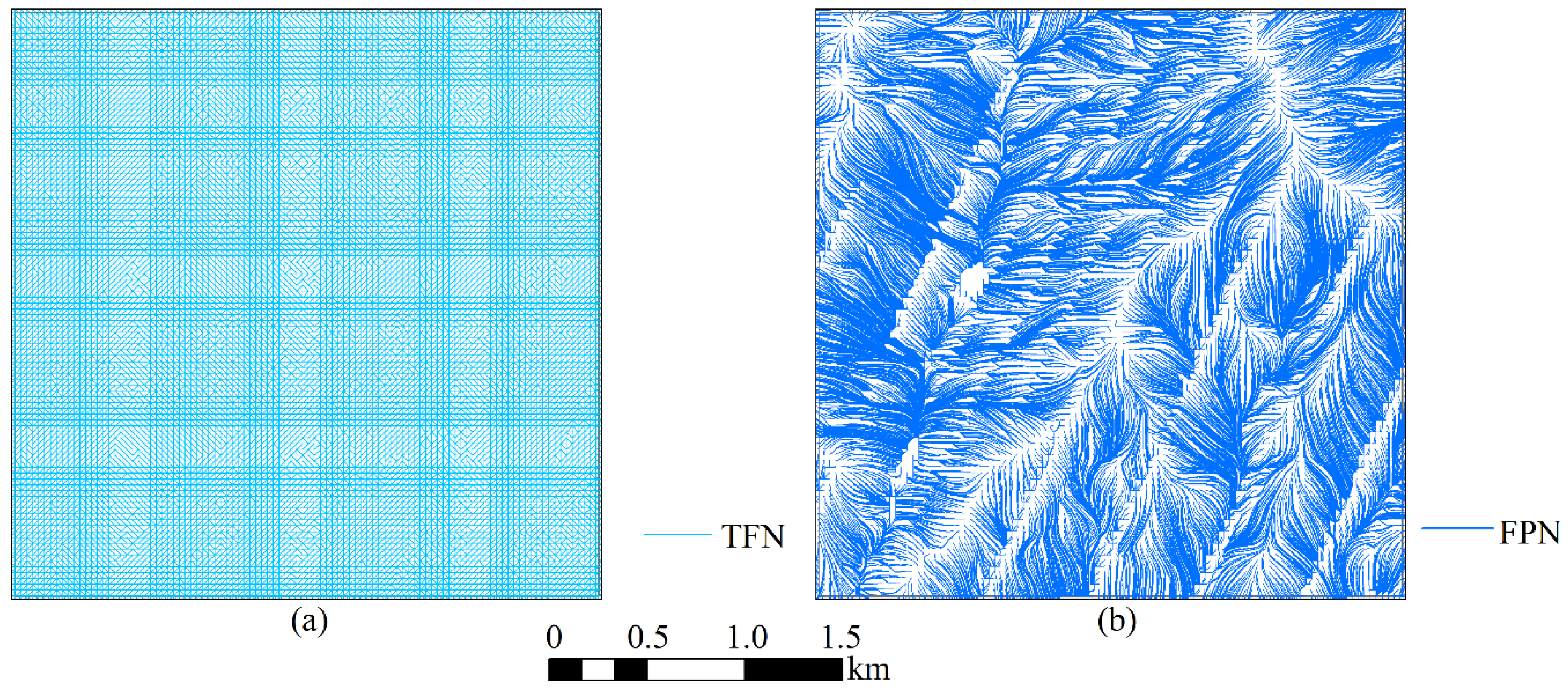
To overcome the aforementioned disadvantages, we present a flow-path-network-based (FPN-based) algorithm to derive the flow path curvature (
C) based on the vector-based approach. It uses the flow-path network model [
49] to generate the one-dimensional flow path network (FPN). Then, a new flow-path-network-flow-path-curvature (FPN-C) algorithm is presented to calculate the
C from the FPN. It aims to improve the calculation accuracy of the
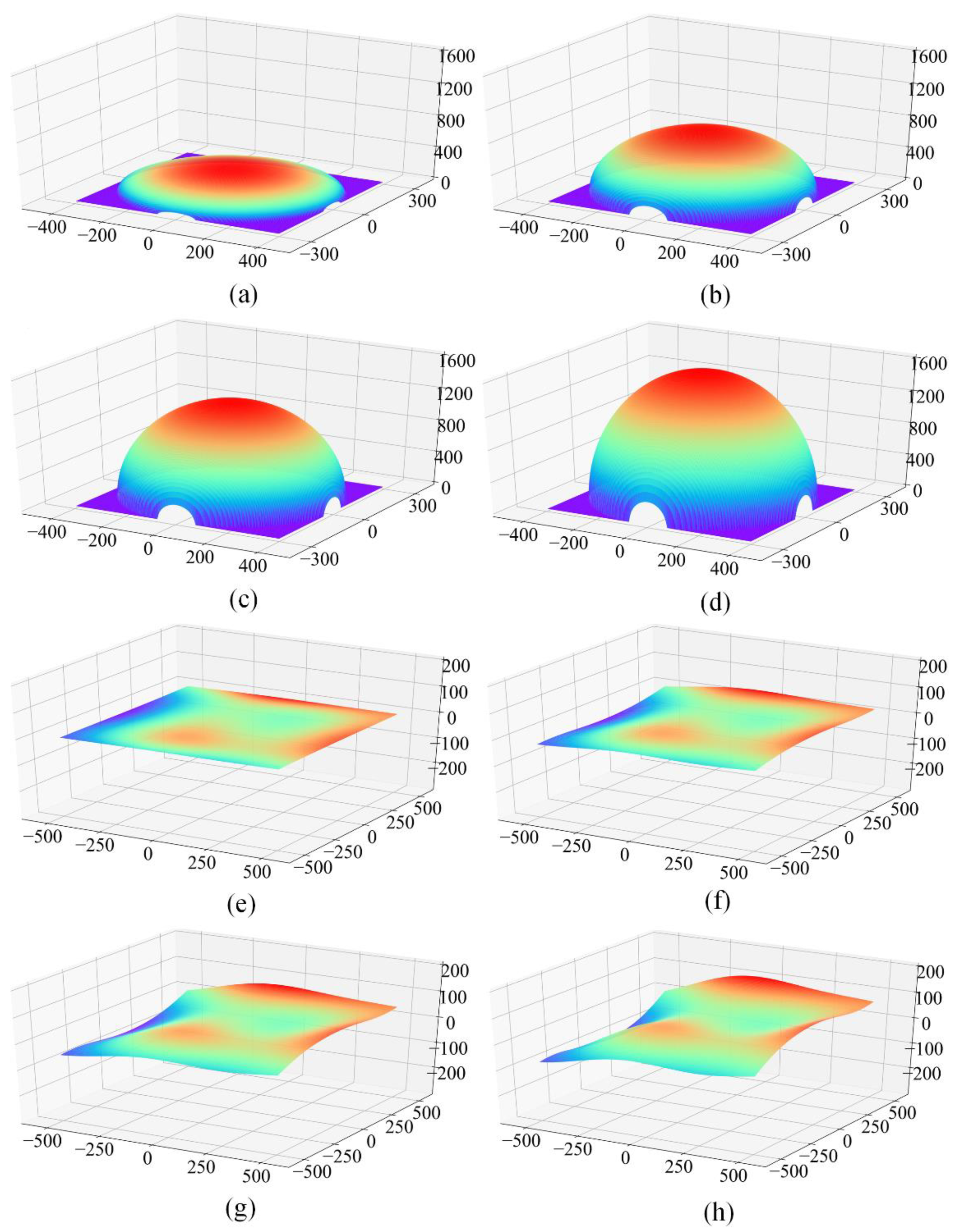
C and avoid the interpolation error and the choice of the calculation algorithm in practical applications. The experiments consisted of two sections: (1) quantitatively evaluating the accuracy of the new algorithm on the 5 m DEMs generated from the mathematical ellipsoid and Gauss surface models, and (2) qualitatively assessing the accuracy of the proposed method by using a real-world DEM of a hilly plateau and mountainous region.
The structure of the paper is arranged as follows. The methods of the FPN-based approach are presented in
Section 2.
Section 3 describes the experiments. The experiment results are shown in
Section 4. The accuracy of the proposed approach is discussed in
Section 5.
Section 6 concludes the paper and illustrates directions for further research.
5. Discussion
Our new approach attempts to calculate the flow path curvature (C) values from the vector-based flow path network (FPN). The presented method converts the three-dimensional terrain into a one-dimensional flow line. The vector flow line can directly reflect the curve projected by the flow path over the horizontal surface and only utilizes the geometric parameter (coordinate of the break points and length of the line) to estimate the flow path curvature. Thus, it can avoid the local interpolation error based on the square-grid DEM and is the optimal choice of calculation algorithm, focusing on how the flow moves over the terrain surface. The experimental results demonstrate that the new approach has advantages over the selected comparison methods on the whole and can obtain a high accuracy with different terrains.
5.1. Accuracy Measures
The results of the quantitative test demonstrate that the
C simulated by the FPN-based algorithm were generally closer to the theoretical value, and the algorithm was able to achieve a high accuracy for two mathematical surfaces. From
Table 5, we can see that the RMSEs of the Evans, Zevenbergen, and Shary and proposed methods on E1, E2, E3, and E4 were 0.0012, 0.0024, 0.0012, and 0.0014 m, respectively. Compared to the Evans and Shary algorithms, the RMSE of the proposed method increased by 17% on E1, E2, E3, and E4. Compared to the Zevenbergen algorithm, the RMSE of the new method reduced by 42% on E1, E2, E3, and E4. The RMSEs of the Evans and Shary algorithms on G1, G2, G3, and G4 were 0.0066, 0.0070, 0.0087, and 0.0111 m, respectively. The RMSE of the Zevenbergen algorithm on G1, G2, G3, and G4 was 0.0040, 0.0050, 0.0073, and 0.0101 m, respectively. The RMSE of the proposed algorithm on G1, G2, G3, and G4 was 0.0043, 0.0052, 0.0076, and 0.0102 m, respectively. Compared to the Evans and Shary algorithms, the RMSE of the new algorithm reduced by 35%, 26%, 13%, and 8% on G1, G2, G3, and G4, respectively. Compared to the Zevenbergen algorithm, the RMSE of the proposed method increased by 8%, 4%, 4%, and 1% on G1, G2, G3, and G4, respectively.
Moreover, the MAEs of the Evans, Zevenbergen, and Shary and proposed methods on E1, E2, E3, and E4 were 0.0002, 0.0011, 0.0002, and 0.0002 m, respectively. The MAE of the new approach was the same as that of the Evans and Shary algorithms on E1, E2, E3, and E4. Compared to the Zevenbergen algorithm, the MAE of the new approach reduced by 82% on E1, E2, E3, and E4. The MAEs of the Evans and Shary algorithms on G1, G2, G3, and G4 were 0.0029, 0.0041, 0.0059, and 0.0079 m, respectively. The MAE of the Zevenbergen algorithm on G1, G2, G3, and G4 was 0.0019, 0.0032, 0.0051, and 0.0072 m, respectively. The MAE of the proposed algorithm on G1, G2, G3, and G4 was 0.0025, 0.0038, 0.0058, and 0.0077 m, respectively. Compared to the Evans and Shary algorithms, the MAE of the new approach reduced by 14%, 7%, 2%, and 3% on G1, G2, G3, and G4, respectively. Compared to the Zevenbergen algorithm, the MAE of the new approach increased by 32%, 19%, 14%, and 7% on G1, G2, G3, and G4, respectively. These results show that the new approach can reduce the impact of landscape morphology on different terrain surfaces. Therefore, the new algorithm can generally obtain a relatively good result for the two above-mentioned surfaces.
5.2. Reasonable Spatial Distribution
The results of the spatial distributions of the residual values on the mathematical surfaces and of the estimated
C values on the real-world terrain show the expected distribution patterns, and discrete patterns and some anomalous distributions. For E1, E2, E3, and E4, the results in
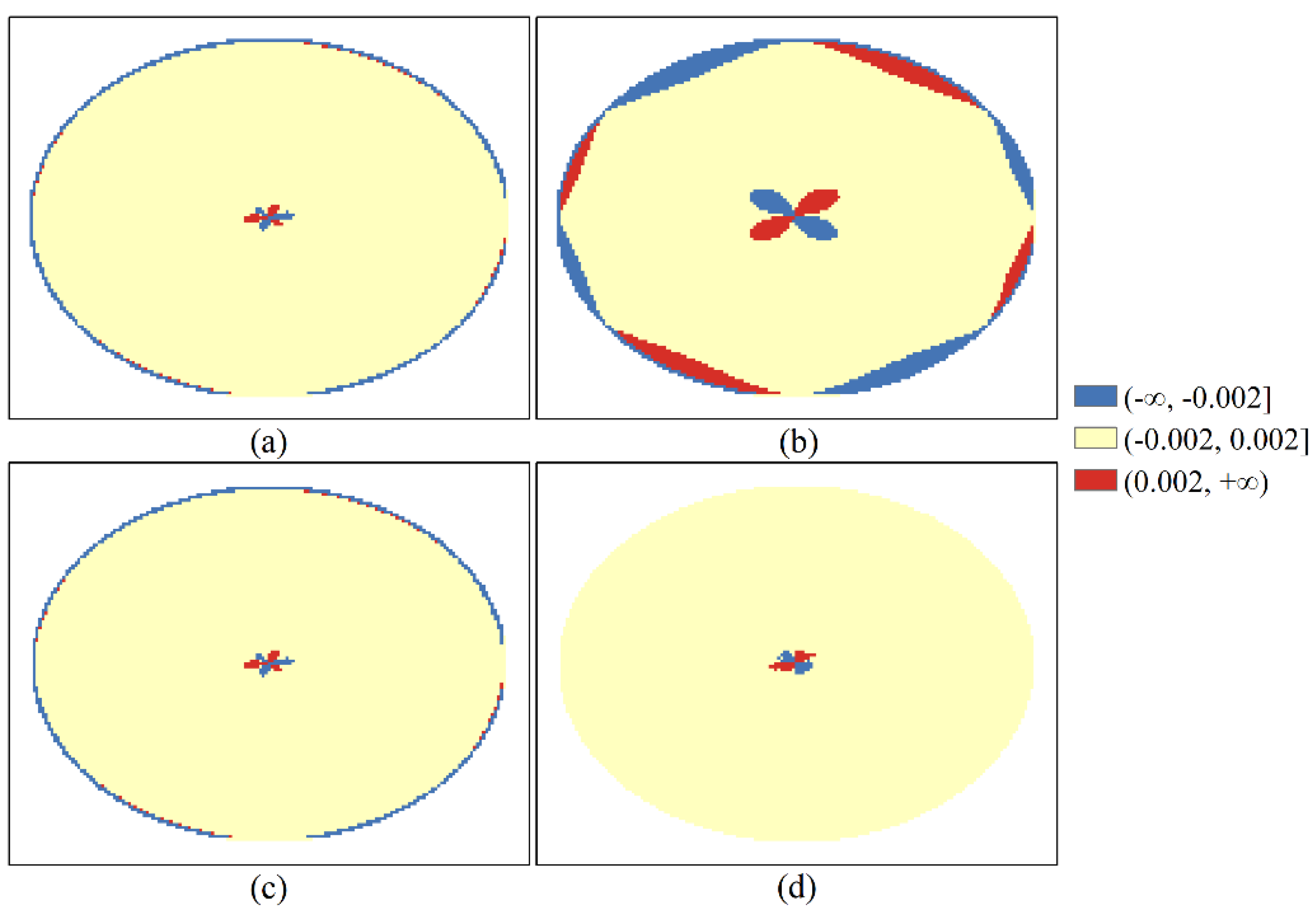
Table 6 show that the number of the residual values between −∞ and −0.002 and between 0.002 and +∞ for the Evans and Shary algorithms was 563 and 80, respectively. The number of the residual values between −∞ and −0.002 and 0.002 and between 0.002 and +∞ for the Zevenbergen algorithm was 1288 and 804, respectively. The number of the residual values between −∞ and −0.002 and between 0.002 and +∞ for the new algorithm was 42 and 45, respectively. For the Evans and Shary algorithms, the number of the residual value between −∞ and −0.005 and between 0.005 and +∞ on G1 was 3492 and 3384, respectively. The number of the residual value between −∞ and −0.005 and between 0.005 and +∞ on G2 was 8105 and 4710, respectively. The number of the residual value between −∞ and −0.01 and between 0.01 and +∞ on G3 was 5660 and 2112, respectively. The number of the residual value between −∞ and −0.01 and between 0.01 and +∞ on G4 was 8309 and 4892, respectively.
For the Zevenbergen algorithm, the number of the residual value between −∞ and −0.005 and between 0.005 and +∞ on G1 was 1708 and 1334, respectively. The number of the residual value between −∞ and −0.005 and between 0.005 and +∞ on G2 was 6037 and 2363, respectively. The number of the residual value between −∞ and −0.01 and between 0.01 and +∞ on G3 was 5267 and 1554, respectively. The number of the residual value between −∞ and −0.01 and between 0.01 and +∞ on G4 was 7843 and 4477, respectively. For the new algorithm, the number of the residual value between −∞ and −0.005 and between 0.005 and +∞ on G1 was 1341 and 1471, respectively. The number of the residual value between −∞ and −0.005 and between 0.005 and +∞ on G2 was 2846 and 5603, respectively. The number of the residual value between −∞ and −0.01 and between 0.01 and +∞ on G3 was 4673 and 1908, respectively. The number of the residual value between −∞ and −0.01 and between 0.01 and +∞ on G4 was 7356 and 4551, respectively. These results demonstrate that the number of large errors of the new algorithm is generally lower than that of the other comparison algorithms.
From
Table 7, we can see that the proportions of the large errors obtained by the Evans, Zevenbergen, and Shary and the proposed method were 4.28%, 13.92%, 4.28%, and 0.58%, respectively. The results in
Table 8 show that the proportion of large errors of the new algorithm reduced by 86.45%, 95.83%, and 86.45% of that of the Evans, Zevenbergen, and Shary algorithms, respectively. For the Evans, Zevenbergen, and Shary and the proposed methods, the proportions of large errors on G1 were 17.19%, 7.61%, 17.19%, and 7.03%, respectively. The proportions of large errors on G2 were 32.04%, 21.00%, 32.04%, and 21.12%, respectively. The proportions of large errors on G3 were 19.43%, 17.05%, 19.43%, and 16.45%, respectively. The proportions of large errors on G4 were 33.00%, 30.80%, 33.00%, and 29.77%, respectively. The results in
Table 8 show that the proportion of large errors of the new approach reduced by 59.10%, 34.08%, 15.34%, and 9.79% of that of the Evans and Shary algorithms on G1, G2, G3, and G4, respectively. The proportion of large error of the new approach reduced by 7.62%, −0.57%, 3.52%, and 3.34% of that of the Zevenbergen algorithm on G1, G2, G3, and G4, respectively. These results demonstrate that the proportion of large errors of the new algorithm is generally lower than that of other comparison algorithms.
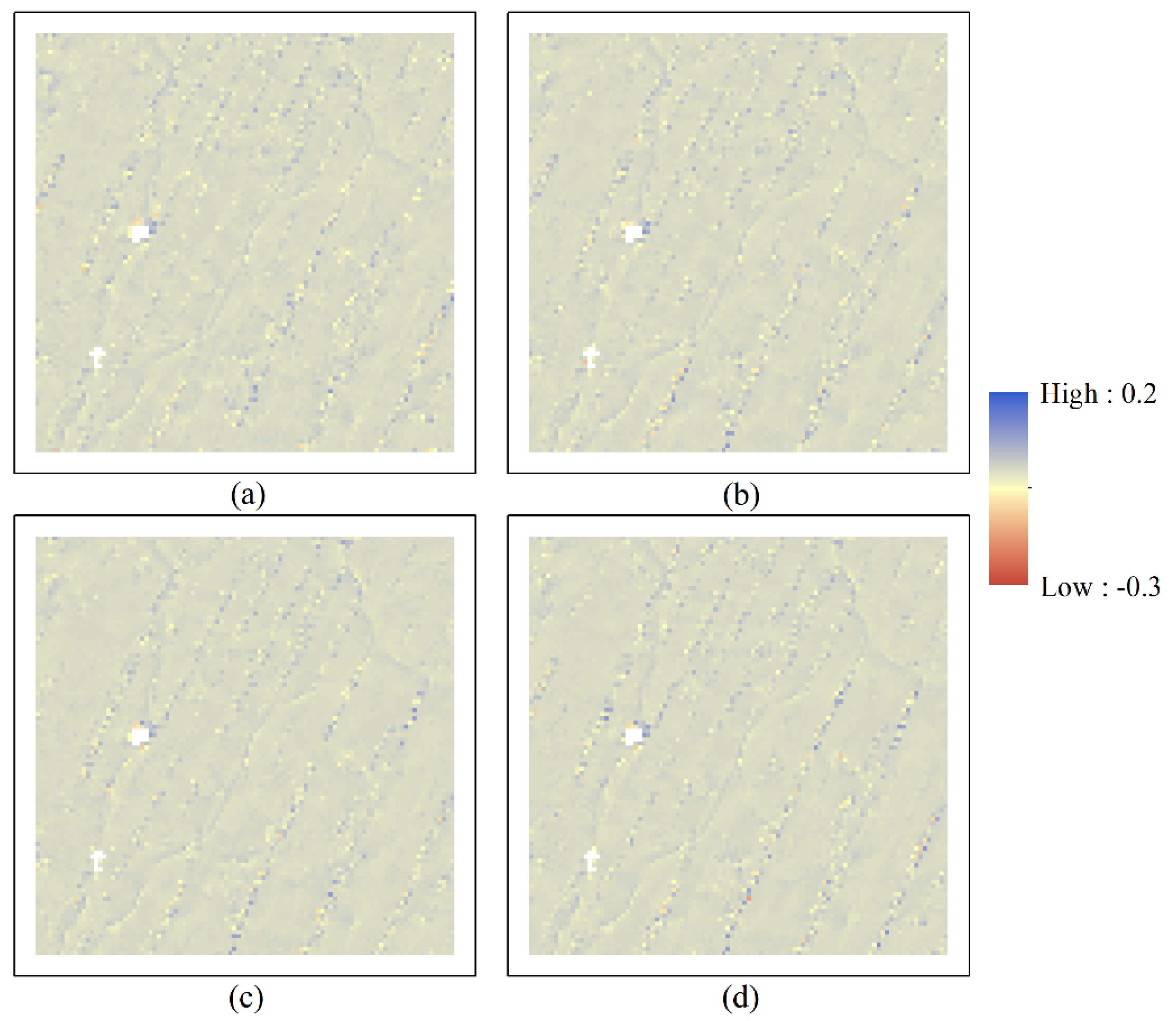
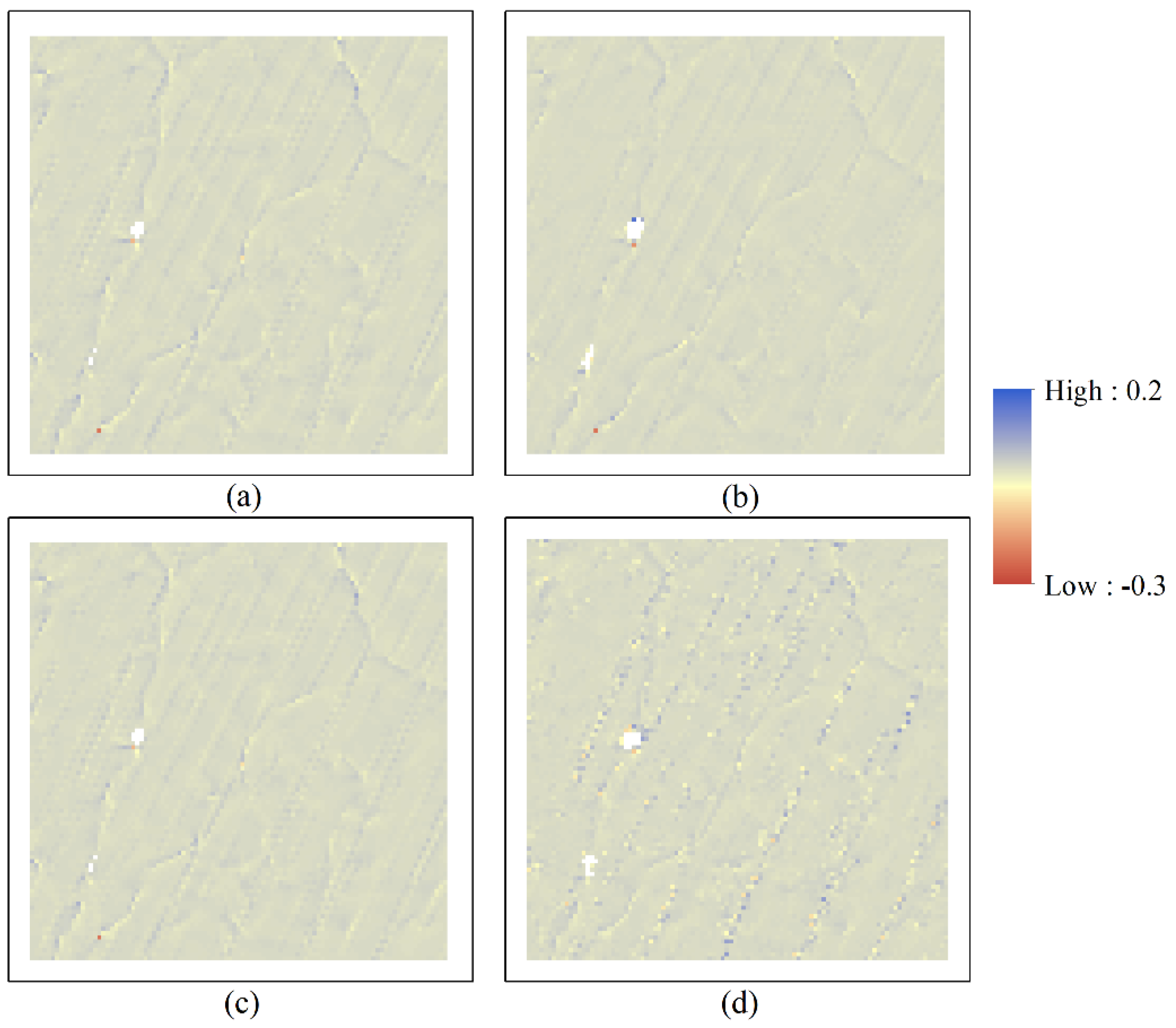
For E1, E2, E3, and E4, the proportion of residual values of the new approach between −0.002 and 0.002 increased by 3.87% compared to the Evans and Shary approaches. The proportion of residual values of the new approach between −0.002 and 0.002 increased by 15.50% compared to the Zevenbergen algorithm. Combing the results in
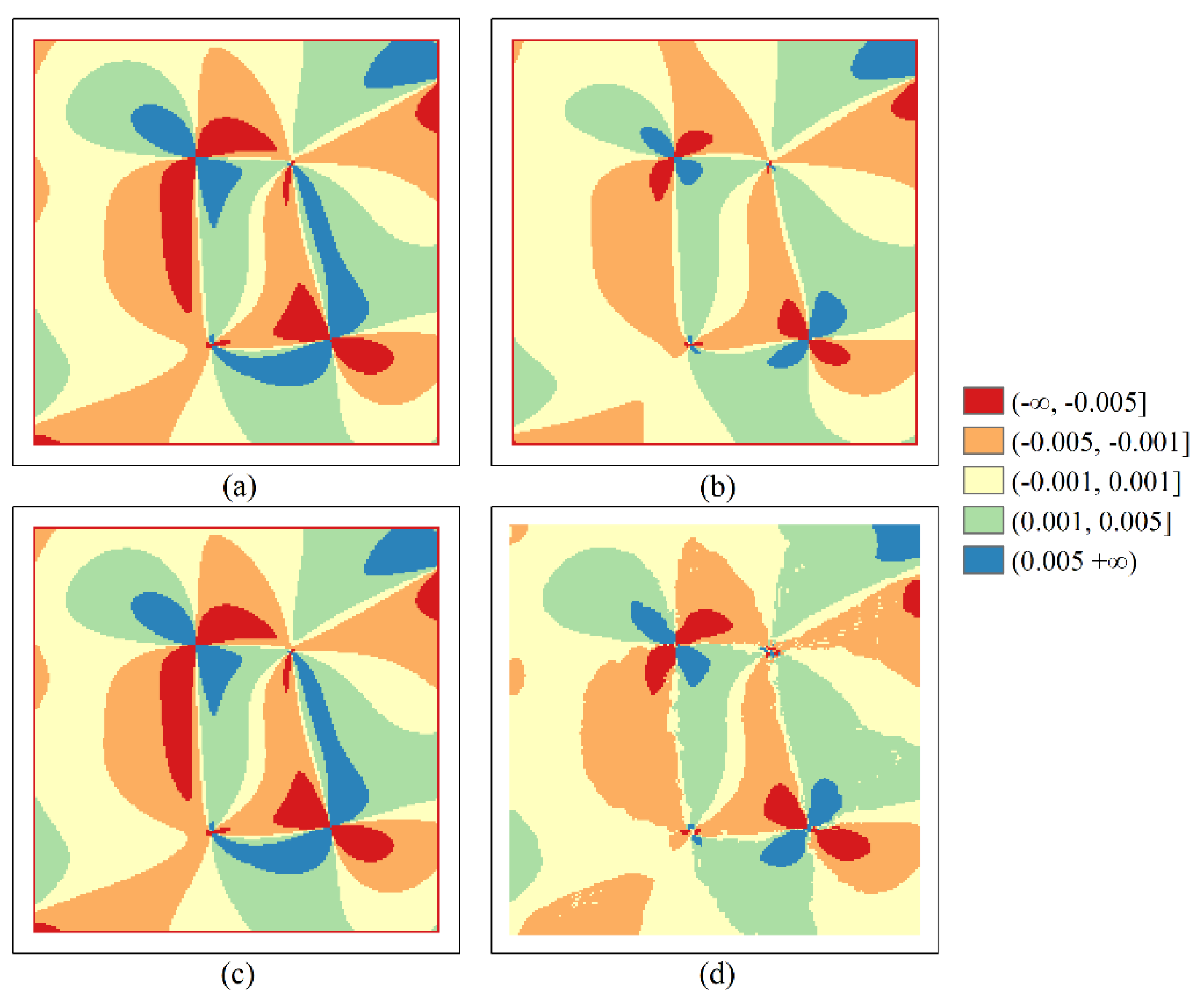
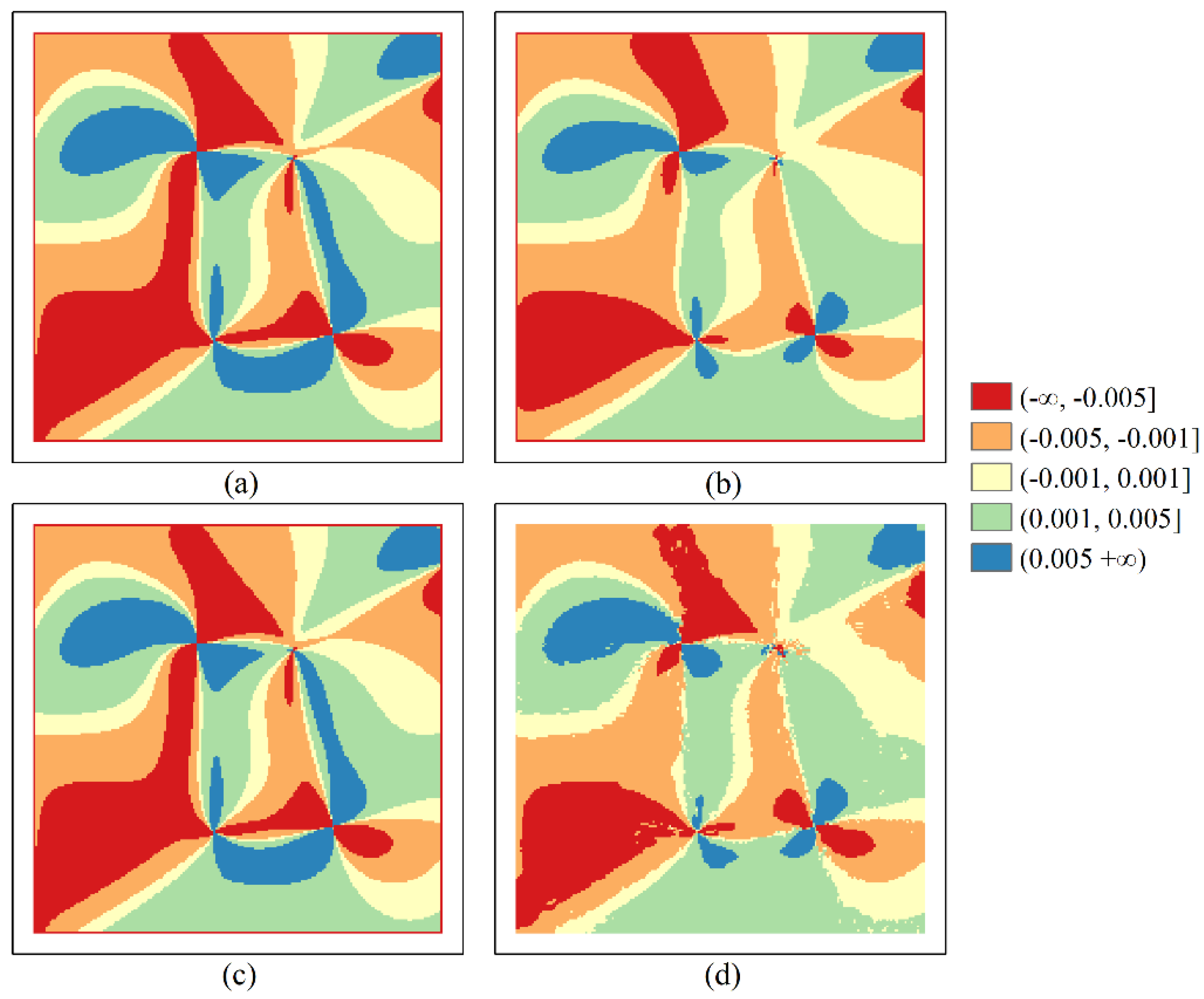
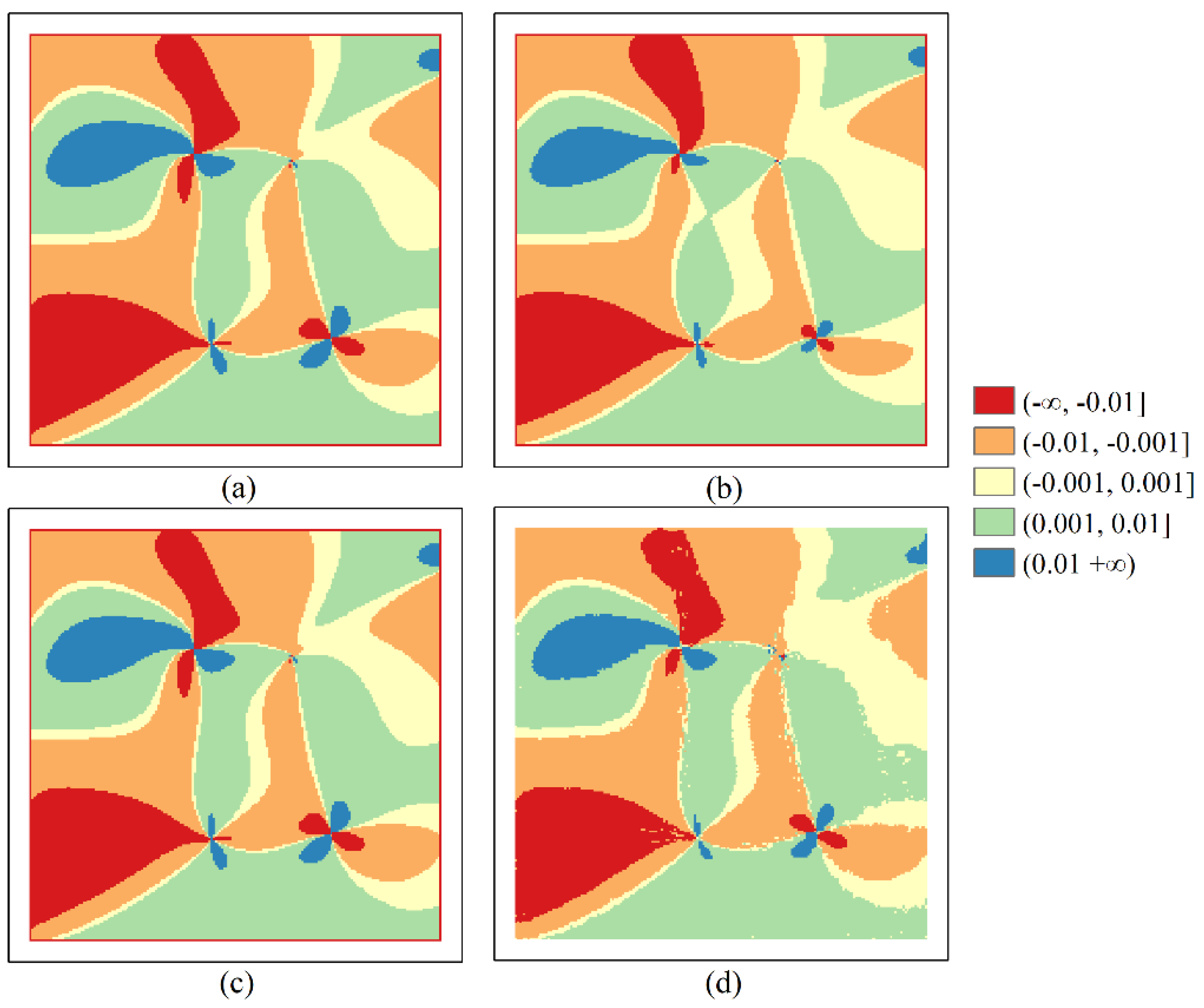
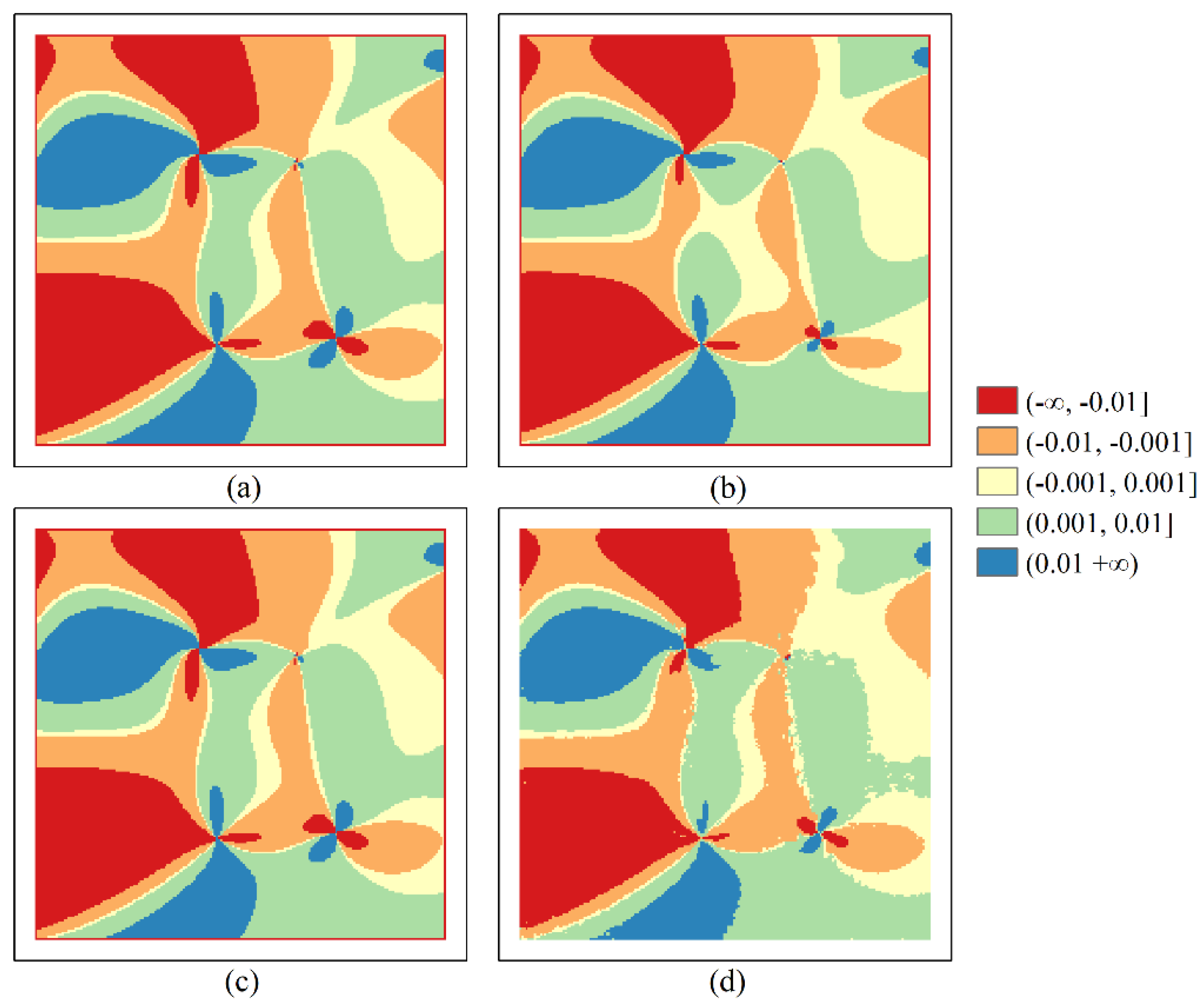
Figure 9, we can see that the residual value of the new approach was mainly distributed between −0.002 and 0.002, and was smaller than that of the comparison algorithms on E1, E2, E3, and E4. For the abovementioned order of Gauss surfaces, the proportion of residual values of the new approach between −0.001 and 0.001 increased by 21.03%, 16.29%, 16.06%, and 21.39% compared to the Evans and Shary approaches, respectively. Compared to the Zevenbergen algorithm, the proportion of residual values of the new approach between −0.001 and 0.001 reduced by 6.60%, 6.47%, 10.47%, and 9.29%, respectively. Combing the results in
Figure 10,
Figure 11,
Figure 12 and
Figure 13, we can see that the spatial error of the proposed method was much higher than that of the Evans and Shary algorithms, and slightly lower than that of the Zevenbergen algorithm on G1, G2, G3, and G4 on the whole. Therefore, the performance of the new approach is generally better than that of the comparison algorithms on the ellipsoid and Gauss surfaces.
From
Figure 14 and
Figure 16, we can see that the
C value of the proposed algorithm was slightly higher than that of the Evans, Zevenbergen, and Shary algorithms on the ridges of extremely complicated terrain surfaces, which symbolized the area with obvious topographic relief. The new algorithm has a relative advantage over the selected comparison methods in gullies. Generally speaking, the FPN-based algorithm produces plausible outcomes, which conform to the real terrain. Because of the lack of field measurements of the partial derivatives, the quantitative evaluation of the proposed algorithm could not be simulated.
5.3. Consistent Simulation Results
From
Table 4, we can see how the accuracy of the new approach varied depending on the threshold value for cutting up the flow line over the FPN. For E1, the RMSE of the FPN-based algorithm was 0.0014, 0.0014, 0.0014, and 0.0015 m under the threshold values of 30, 50, 100, and 150 m, respectively. The MAE of the newly proposed algorithm was 0.0002 m under the different threshold values. For G1, the RMSE of the FPN-based algorithm was 0.0044, 0.0043, 0.0043, and 0.0043 m under the threshold values of 30, 50, 100, and 150 m, respectively. The MAE of the newly proposed algorithm was 0.0027, 0.0025, 0.0025, and 0.0025 m under different threshold values. Combined with the results shown in
Figure 14, the accuracy of the new algorithm was generally invariant with the change of the cutting-up threshold for the ellipsoid, Gauss, and real-world surfaces. Therefore, the proposed algorithm achieved the consistent simulation results.
6. Conclusions
In this paper, we propose a new approach to simulating the flow path curvature (C) using a vector-based method. This approach utilizes a new FPN-C method to derive C from the flow path network (FPN). The new algorithm aims to enhance the accuracy of simulating C and avoid interpolation errors, as well as being the choice of calculation algorithm for practical applications.
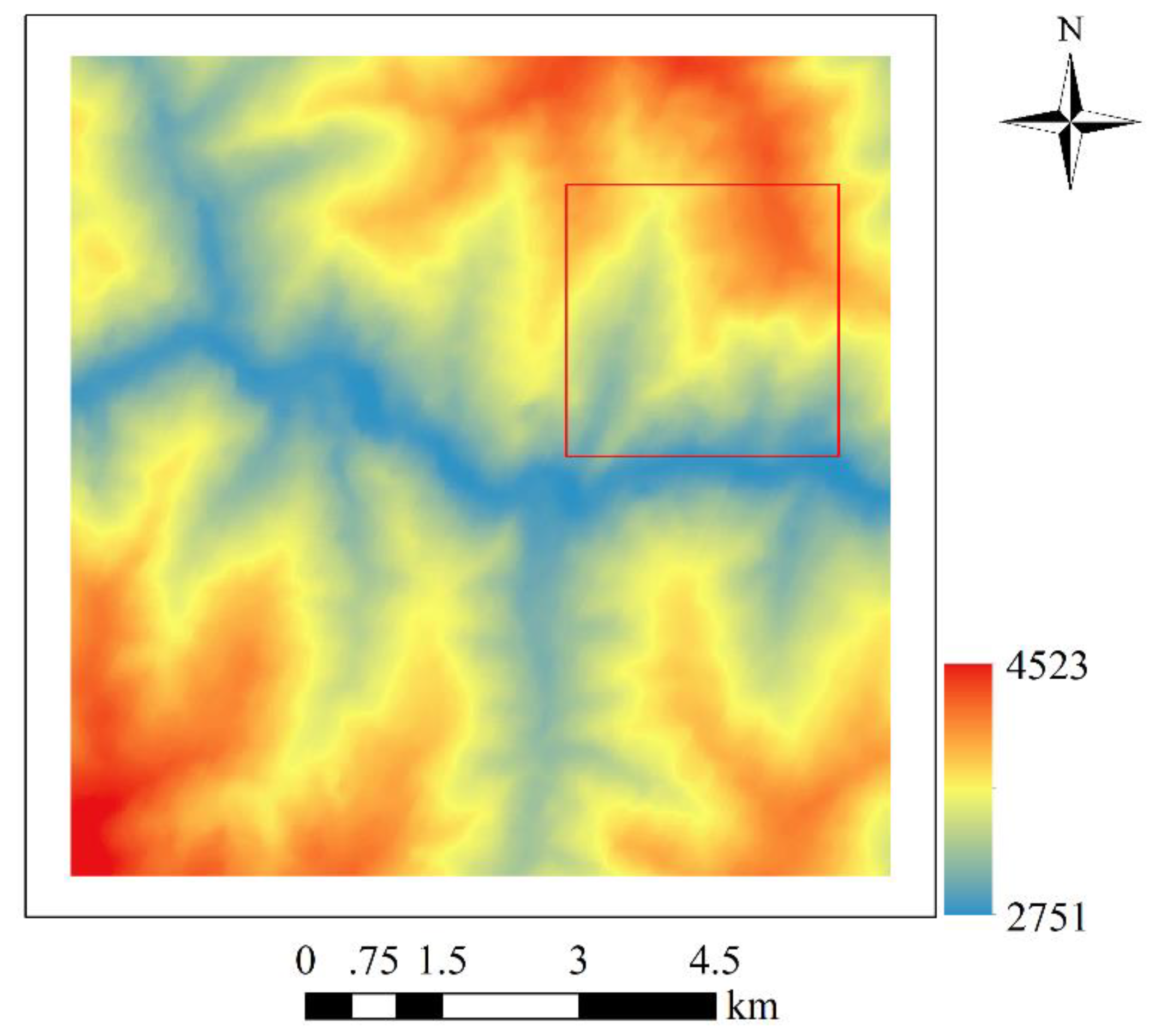
The presented method was implemented on the mathematical ellipsoid and Gauss surface models for a quantitative evaluation. Then, it was applied to a hilly plateau and mountainous region, located in the central Ganzi Tibetan Autonomous Prefecture of Sichuan Province, as a qualitative assessment. The results demonstrated that the new algorithm can obtain a relatively good result on different terrain surfaces. The new approach generally performed better than the comparison algorithms on the two above-mentioned surfaces. It was validated by both the quantitative evaluation (RMSE and MAE) and qualitative assessment (the visual comparison of the spatial distribution of the simulated C values on the mathematical and real-world surface). The RMSE and MAE of the new method were 0.0014 and 0.0002 m, reduced by up to 42% and 82% of that of the comparison algorithms on the ellipsoid surface, respectively. The RMSE and MAE of the presented method were 0.0043 and 0.0025 m at best, reduced by up to 35% and 14% of that of the comparison algorithms on the Gauss surface, respectively. For the ellipsoid surfaces, the residual value of the new approach was mainly distributed between −0.002 and 0.002 which was smaller than that of the comparison algorithms. The proportion of large errors of the new algorithm was 0.58%, reduced by up to 95.83% of that of the comparison algorithms. For the Gauss surfaces, the proportion of large errors of the new algorithm was 7.03% at best, reduced by up to 59.10% of that of the comparison algorithms. Moreover, this new approach can achieve consistent simulation results.
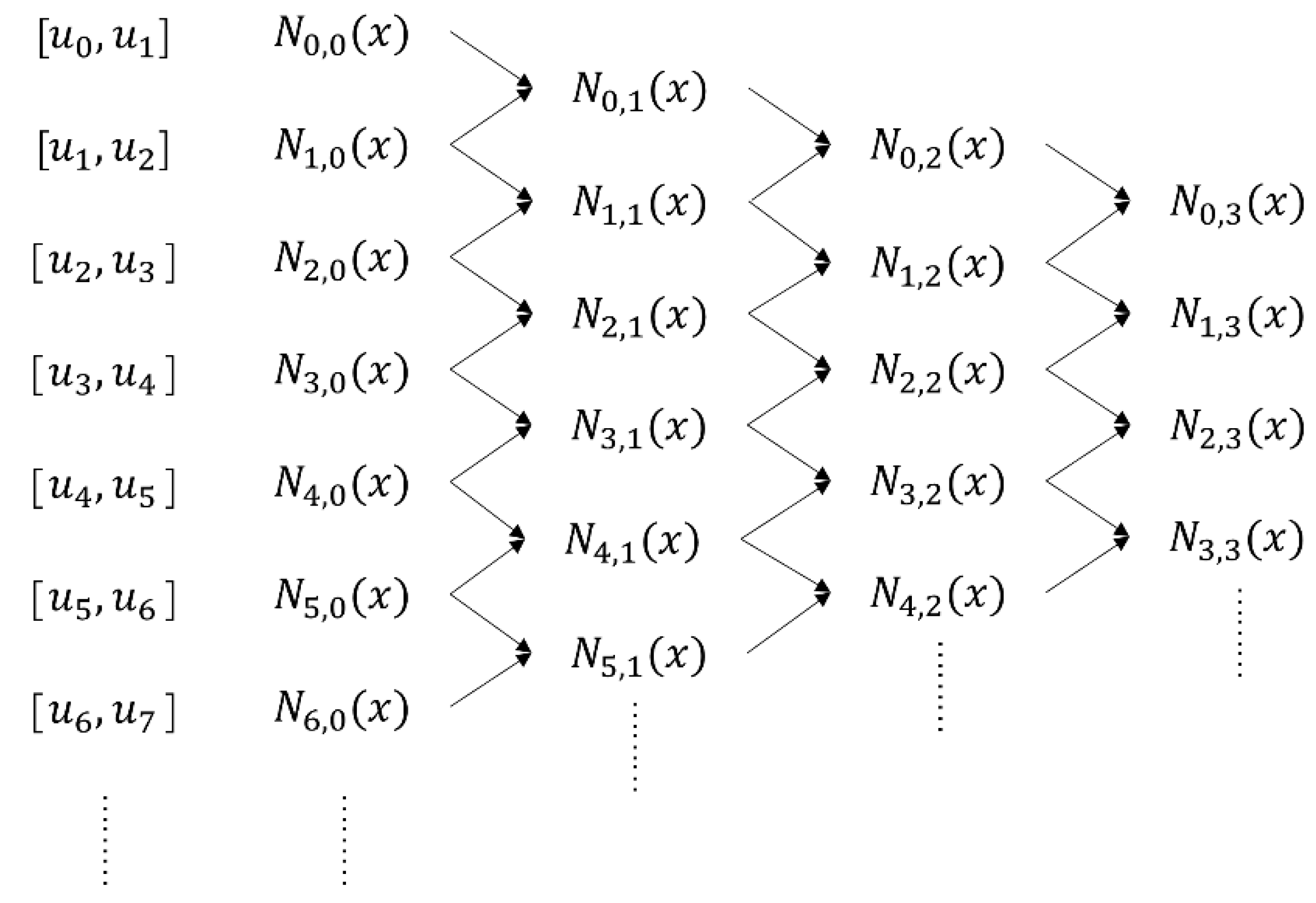
However, the vector-based flow line requires a high computing power in practical applications, especially in large DEMs. Therefore, the optimization and parallelization of this algorithm will be the focus of our future work. In addition, the B-spline interpolation method does not pass through the point used for interpolation. Thus, there may be a better algorithm to further enhance the accuracy when estimating the flow path curvature, which will be addressed in our future work as well. We will also continue to improve the calculation of the flow path curvature for the karstic or glacier type relief surfaces.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}