1. Introduction
Map projections are a key concept in cartography and geographic information science. Choosing an inappropriate map projection may cause severely flawed results when carrying out geospatial analyses (e.g., when buffering in an inappropriate projected coordinate system [
1]) or may distort a map reader’s view on the world when exploring a thematic or topographic map. Hence, a thorough understanding of the construction process and map properties is important. Mapping software typically implements the projection process as a set of equations that can be applied to a point in geographic coordinates to obtain its projected coordinates. Examples for this approach can be found in kartograph.js [
2], d3.js [
3], or Flex Projector [
4]. However, educational resources tend to follow a more figurative approach to explain the underlying geometrical meaning of the projection process.
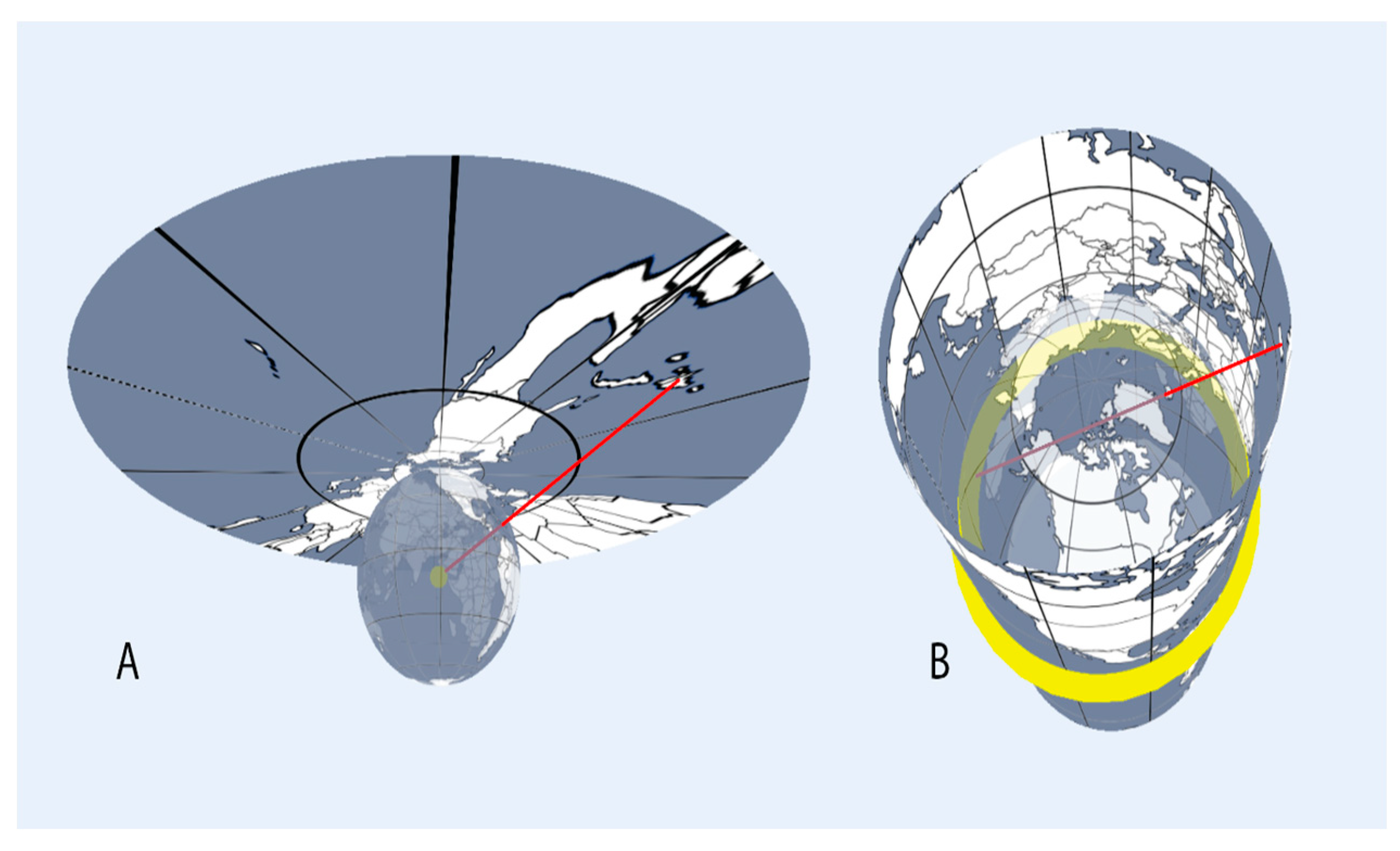
This construction process typically starts with a projection center that can be imagined as a light source (or light bulb) placed in the proximity of (or within) the globe and emitting light in all directions. In the simplest case, the light source has the shape of a point, but other geometries exist as well. Light rays pass through the globe, casting the colors at their intersection points on the globe’s surface onto the projection surface (usually a plane, cone or cylinder).
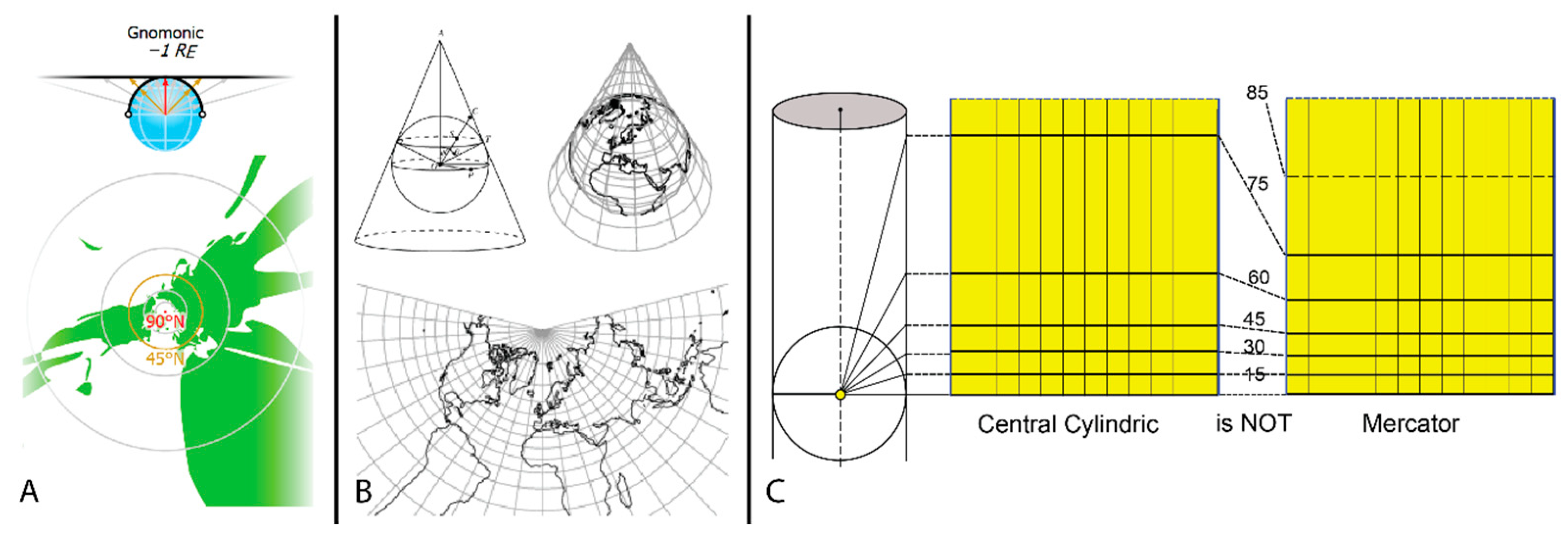
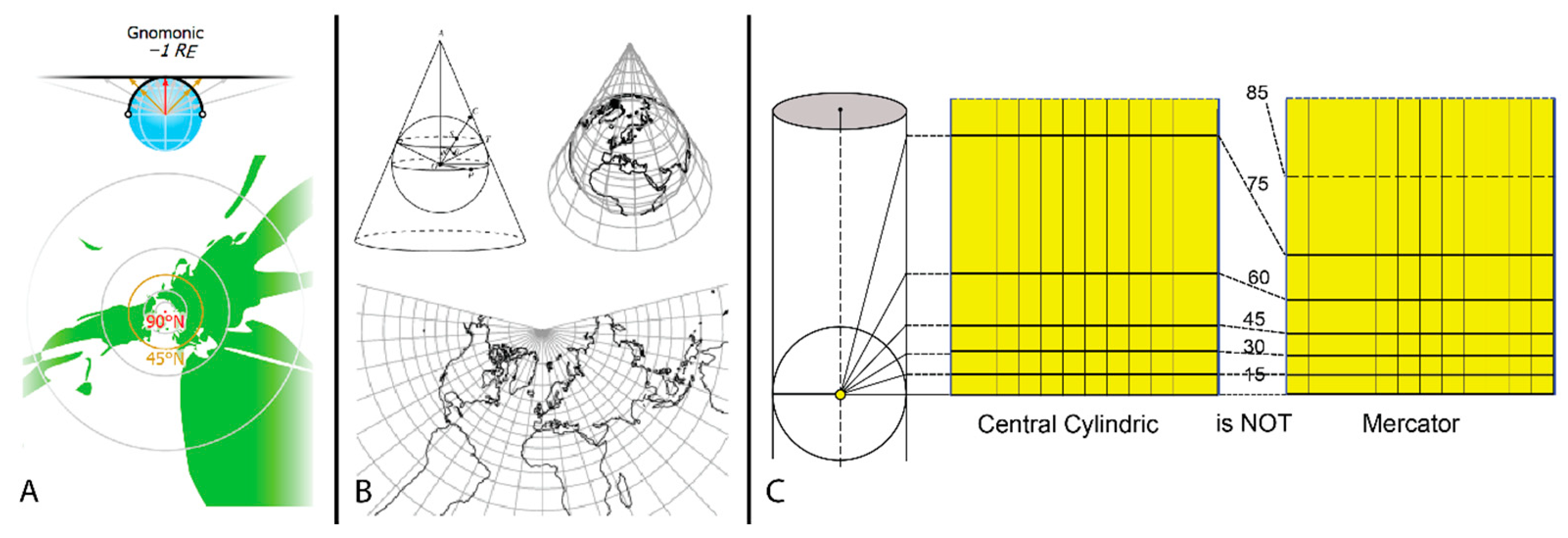
Figure 1 shows three examples of how map projections may be constructed this way.
Figure 1A explains the construction of the gnomonic azimuthal projection by depicting light rays from the light source in all directions (indicated by arrows) to hit the projection plane. The resulting map is depicted below, showing distorted shapes of land areas.
Figure 1B depicts the construction of the central conic projection by indicating a projection cone touching the globe with the resulting unrolled map shown below.
Figure 1C intends to illustrate the different positions of the parallels for the central cylindrical and the Mercator projection implying that an additional non-linear scaling is required to realize the desired projection. There are numerous resources that show similar depictions, either on the web (e.g., References [
5,
6]) or in printed textbooks (e.g., References [
7,
8]).
These illustrations have several limitations. Firstly, each illustration shows only snapshots of the construction process. There is still considerable mental work involved to understand the transition from the projection concept to the resulting map. Secondly, static images only provide one view on the construction process. It is not possible to obtain different views to get a comprehensive understanding of the mapping process. Thirdly, exploring different configurations of these objects is not possible as this would require interactive adjustments of the light source, projection surface, basemap, etc. We argue that such interactivity allows improving the understanding of how different map projections relate to each other. The authors are not aware of any interactive visualization tool, which allows constructing map projections following an implementation of the light source metaphor.
These limitations can be overcome if interactive visualization methods are provided. The computational concepts and how they can be implemented to create a fully functional web application are the main contributions of this paper. The concepts are applicable for projections, which can be constructed by simple geometric means (i.e., map projections that can be manually constructed with ruler and compasses and do not require the use of formulas) by using different configurations of the projection surface and the light source. Furthermore, the resulting map projections may be scaled in a non-linear way to approximate variants such as the Mercator projection.
It is recommended to try out the prototype showcasing the concepts described in this paper directly in the browser:
https://gevian.github.io/GITTA-MP. Note that the prototype accessible at this URL may change in the future as new versions of the prototype are released. The prototype version described in this paper is available as a zip archive and as tag v1.0.0-light-source-metaphor at the code repository at
https://github.com/gevian/GITTA-MP.
The prototype is open-source software (GPLv3) and depends only on other open-source projects (D3.js, three.js). As such, it can be freely used in education and will be integrated into the open education platform Geographic Information Technology Training Alliance (GITTA) to make it easily available to a wide range of learners. GITTA is accessible at
http://www.gitta.info/.
2. Concept
Providing an integrated experience for the construction process of map projections led to three requirements. Firstly, each construction step should be easily traceable and, hence, improve the intellectual comprehension of the entire process. Secondly, it should be possible to manually change the parameters of each construction step to foster the understanding of the consequences that these changes may have on the final map. Thirdly, the user should optionally be guided through each construction step by providing tailored parameterizations for common map projections or interesting configurations. This is advantageous since allowing an unguided exploration of parameters bears the risk that meaningful configurations may be difficult to find. These requirements necessitate a highly interactive application that not only allows changing each parameter in real-time, but also requires continuously depicting the transition between two configurations such as unrolling the map, scaling it, or setting parameters to default values. The basic objects that comprise the light source metaphor remain the same as depicted in
Figure 2.
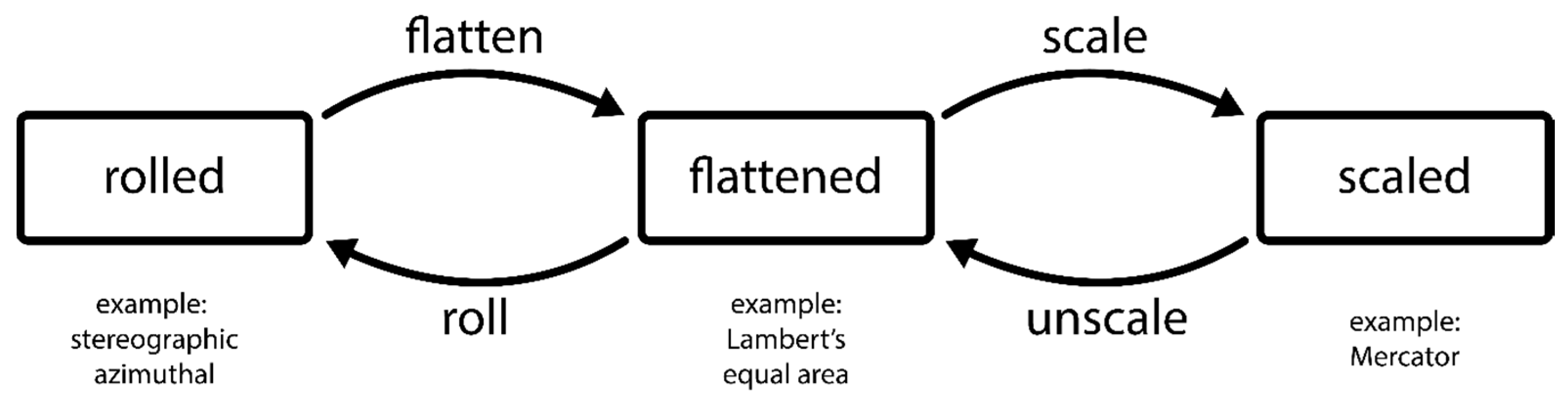
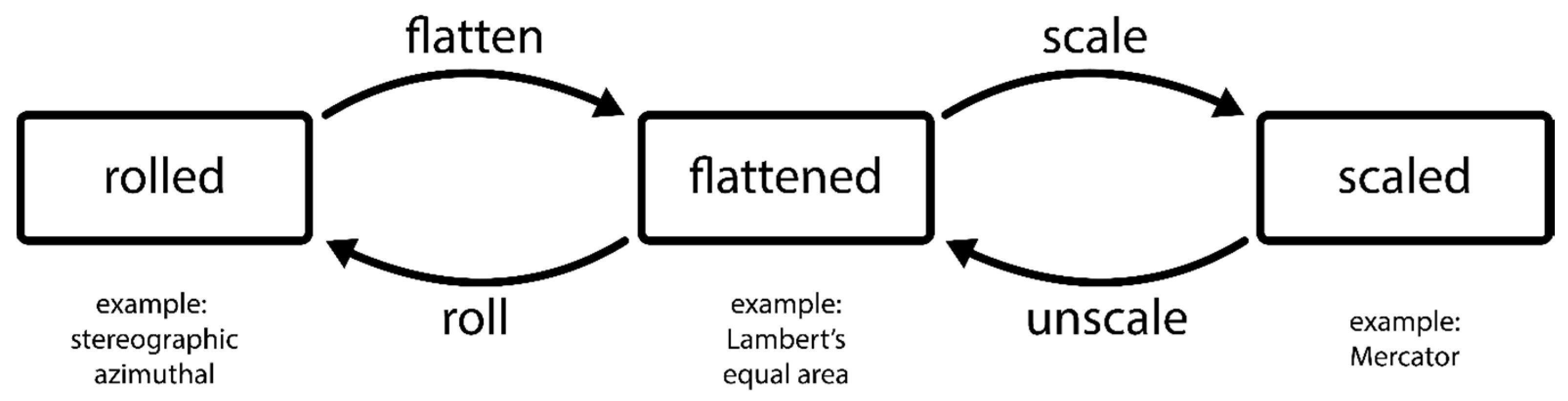
The high-level steps of the construction process and the transitions between them are depicted in
Figure 3. In the first, initial state (“rolled”), the basic projection properties such as the type of surface and the position of the light source are defined. This already allows creating a limited set of possible plane-based projections, such as the stereographic azimuthal or the gnomonic azimuthal projections. Cylinder- and cone-based projections, however, need to be flattened to form the actual map. There are numerous projections that can be obtained this way, such as Lambert’s equal area projection or Braun’s stereographic projection. However, many projections cannot be obtained this way such as the Mercator projection, which requires a non-linear scaling. A scaled map cannot be directly rolled again as the introduced distortions may not be geometrically reconstructed. Therefore, the scaling operation needs to be undone to obtain a rollable map.
Allowing retracing the whole process of the construction step in a continuous manner makes it necessary to use a single three-dimensional (3D) view, in which the three main objects (globe, light source, and projection surface) are displayed (
Figure 2). Any parameter change has a direct impact on at least one object displayed in this 3D view.
3. Projection Surface
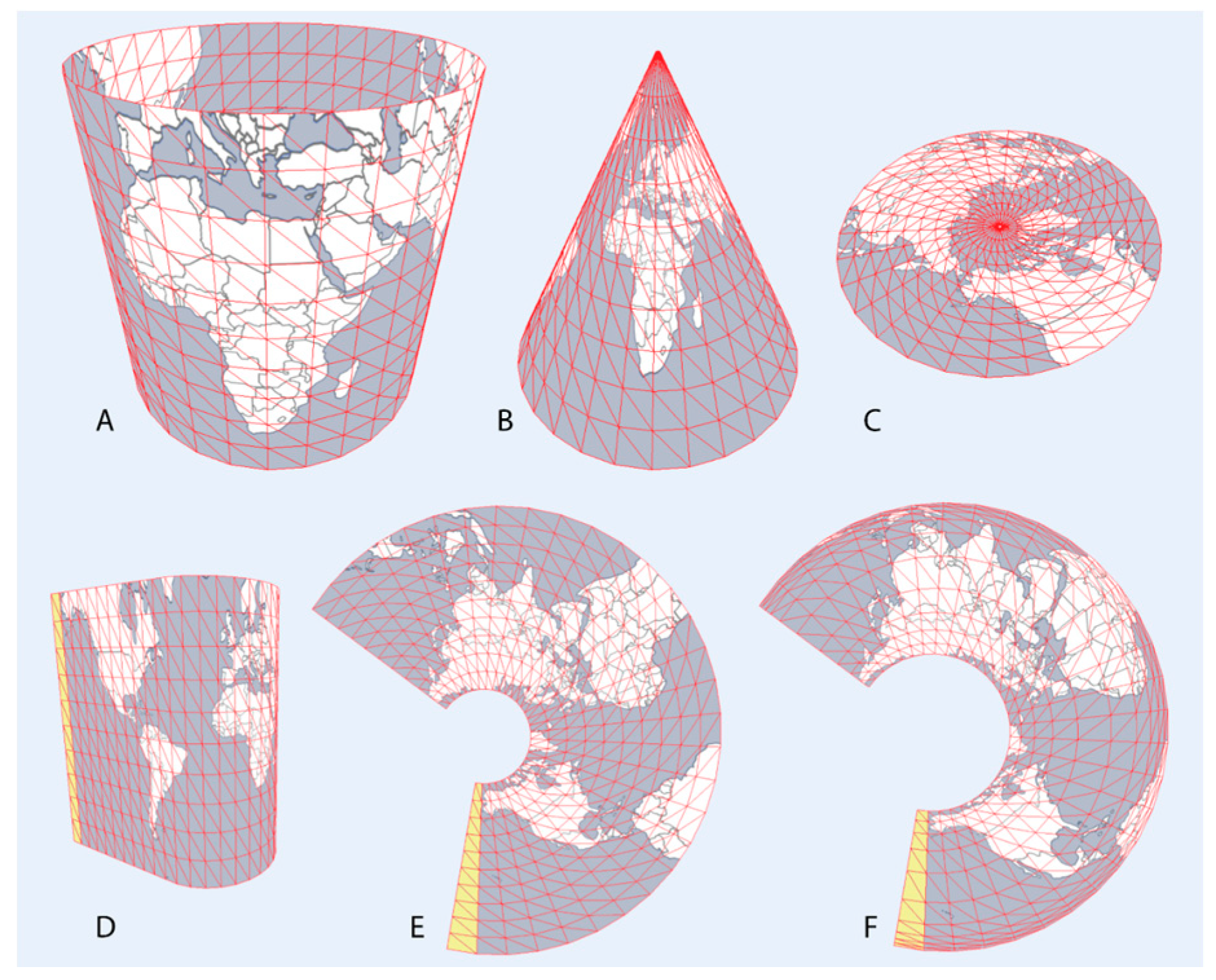
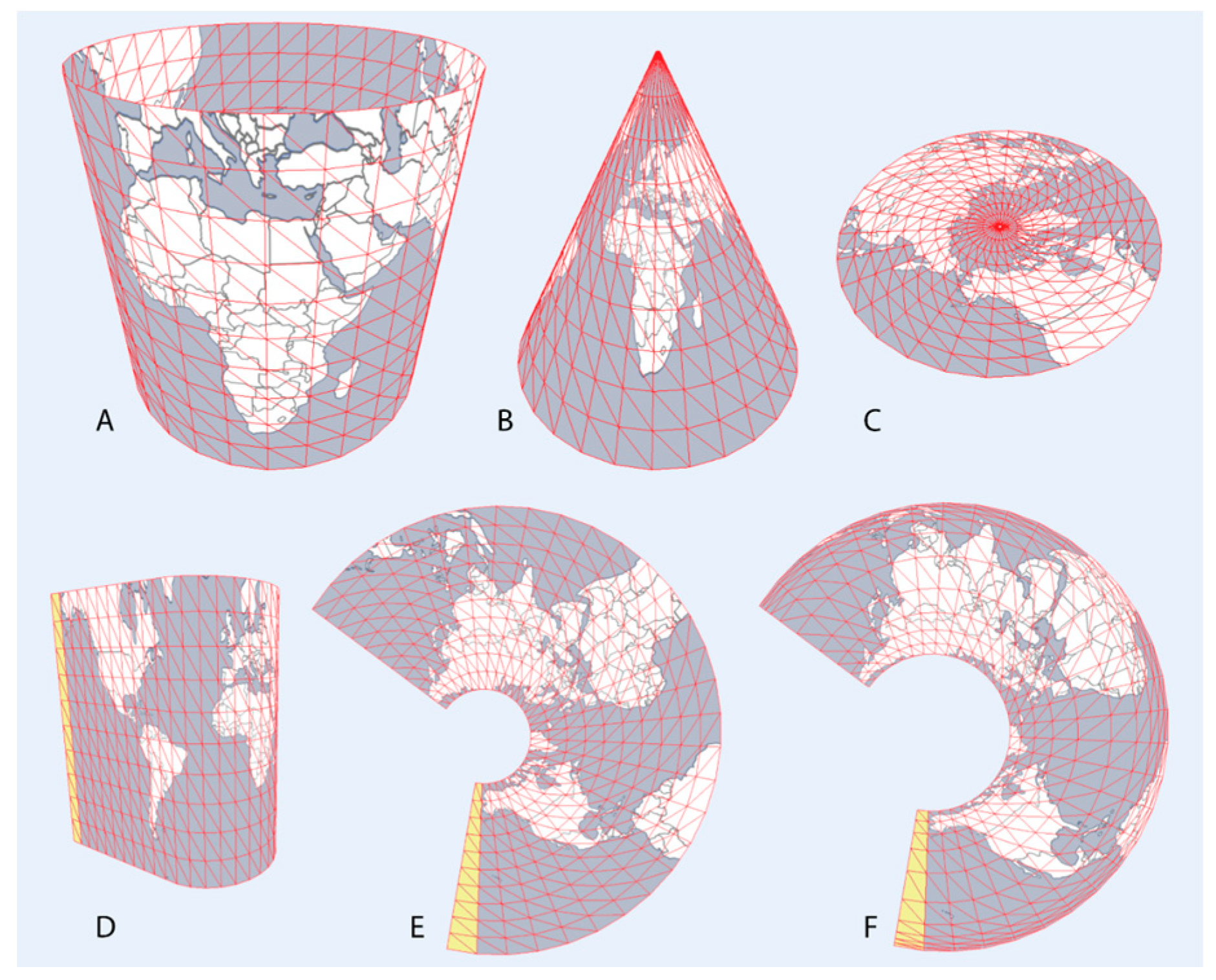
Using a single 3D view to visualize the whole construction process has specific implications for the projection surface as it undergoes several geometrical transformations until the final map is obtained (
Figure 4). A single mesh is used to form all projection surfaces. Initially, this mesh structure is constructed in the form of a cylinder based on quads with each quad consisting of two triangles (
Figure 4A). By reducing one of the two cylinder radii, a (frustum of a) cone can be constructed (
Figure 4B); by subsequently reducing the cylinder axis length, a flat disc is constructed representing the plane (
Figure 4C).
Unrolling is achieved by separating the mesh into a sequence of stripes, where each stripe consists of a set of stacked quads. In
Figure 4D, the first stripe is highlighted in yellow. All subsequent stripes are iteratively rotated until they reside in the plane defined by the first stripe. For the second stripe, this is done as follows: firstly, the angle and the axis of rotation need to be found. The axis of rotation is defined by the common edge between the first and the second stripe. The angle by which each stripe is to be rotated is equal to the angle between the normals of the two stripes. The rotation is then applied to the second stripe and all subsequent stripes. As a consequence, the second stripe lies in the reference plane, while all following stripes are rotated toward the reference plane (but are not there yet). When the process is repeated for the third stripe, it will end up in the reference plane, while all remaining stripes will be somewhat closer to it. The process is repeated until all stripes reside in the reference plane. An intermediate result of this process for a cylinder is displayed in
Figure 4D. The ultimate result exemplified for a cone is displayed in
Figure 4E.
Once flattened, the mesh can be scaled to obtain specific properties. Scaling is realized by using a function that maps each vertex position to a new position along the vertical axis the vertex belongs to. In the examples given in
Figure 4, the vertical axes coincide with the meridians. The scaling function can be either provided explicitly to create a desired map projection or can be defined manually, e.g., using splines. A scaled variant of a flattened cone is depicted in
Figure 4F.
This way of moving vertices to new positions in order to obtain a desired map projection based on scaling a given map projection only yields an approximation. In fact, the image at the moved vertex positions will be mapped exactly, while positions between vertices will be slightly inaccurate due to interpolation. It is, therefore, important to construct a mesh with a high number of vertices to minimize inaccurate mappings. In practice, 50 quads per stripe proved to be sufficient to reduce these deviations to a negligible level. In addition, we want to emphasize that this way of scaling is not trivial as the underlying formulas may make use of complicated trigonometric functions, which cannot be easily reconstructed by simple geometric means.
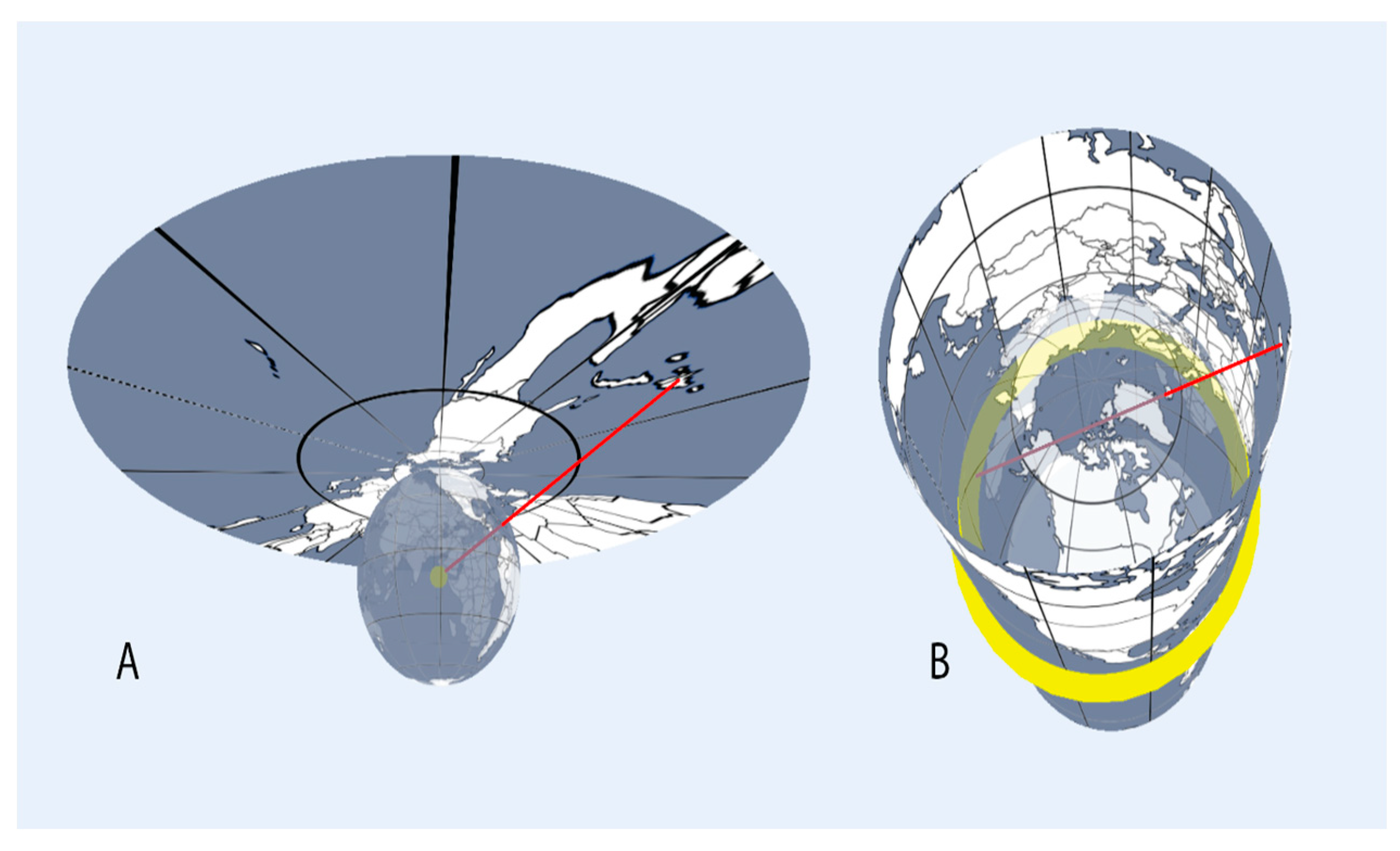
4. Light Source
The projection center is the second dynamic object when constructing projections following the light source metaphor. The simplest shape of a light source is that of a point, in which case, light is emitted equally in all directions. This configuration is required for many simple map projections such as the stereographic and gnomonic azimuthal or the central cylindrical and central conical projections. It can be simply visualized as a glowing sphere (
Figure 5A). Other projections may require different shapes of the light source. The orthographic azimuthal projection, as a simple example, assumes that the projection is carried out orthogonally on the plane. There are several possibilities to visualize this arrangement, for example, by modeling the light source as a glowing plane. However, a simpler solution is to place the point light source infinitely distant from the projection surface, which yields parallel rays of light. Projection lines (red lines in
Figure 5) can be added to help indicate how a specific point on the projection surface obtains its color (In the application, projection lines can be added by pressing shift and then left-clicking on the globe).
There is a set of map projections which cannot be realized by a simple point light source model. For example, the construction of Braun’s stereographic cylindrical projection assumes light rays originating from a circular ring and passing the globe’s surface before being cast onto the projection plane. Another special case with respect to the light source is Lambert’s cylindrical equal-area projection which requires light rays laying in parallel planes. This corresponds to a bar-shaped light source.
A consequence would be that the basic light bulb metaphor can no longer be retained. In order to cover all abovementioned cases, a light source needs to be of type (a) a point, (b) a straight line, (c) a circular line, and (d) a circular area. The latter type enables a parallel light source without the need to place a point light source at infinity.
Conceptually, the introduction of different types of light sources undermines the neat light bulb metaphor. What is missing is a single versatile light source, analogous to the projection plane whose basic mesh construction enables forming planar, conical and cylindrical shapes. A candidate shape for such a light source would be a scalable torus. Its parameters, the radius from the shape’s center to the center line of the tube and the radius of the tube itself along with the scaling, enable creating all shapes such as spheres, discs, bars, and tori.
5. Rendering
Correctly rendering features of the earth’s surface on the projection surface requires adapting the 3D real-time rendering pipeline as supported by common 3D application programming interfaces (APIs) such as OpenGL/WebGL or Direct3D. The output of each rendering operation is the set of pixels that are to be depicted on the computer screen. Hence, to accurately determine the color of a pixel that covers the projection surface requires the following steps:
Determine the pixel’s location in 3D space as if the projection surface was in the “rolled” state.
Construct a projection line between the pixel’s 3D location and the light source’s 3D location.
Compute the intersection with the globe.
Determine the color of the globe at the intersection point (if there is any).
Assign the determined color to the respective pixel on the screen.
A more detailed explanation of these steps is given below. Changing the mesh of the projection surface is carried out either by modifying the local position vertices vl of these triangles (e.g., by reducing one of the radii) or by modifying the mesh’s linear transformation matrix (e.g., by changing the orientation of the surface). The latter is typically referred to as the model matrix MM and is used to transform the vl with respect to the local coordinates of the projection surface into global position vertices vg with respect to the center of the 3D scene. In the next step, the so-called view matrix MV is used to transform the vg into the view coordinates vv with respect to the position of the 3D camera pointing to the scene. Afterward, the projection matrix Mp is used to carry out the perspective distortion of the vv into the perspectively distorted vertices vp. The transformed triangles consisting of vp are finally rasterized according to a given resolution, typically that of the screen. The result of this process is the two-dimensional (2D) image I, which is shown to the user. Generally, image I can contain pixels of other objects as well. For the sake of simplicity, we assume that it only contains pixels that originate from the projection surface.
As explained above, it is required to construct a line (or arcs, in some cases) between the projection center and a point on the projection surface. The color of the point on the projection surface is then equal to the color of the globe where it is intersected by the line. In the continuous case, there is an infinite number of points for which these colors have to be determined. However, since I is discrete (the screen pixels), it suffices to carry out the projection process for each of these pixels.
This requires providing each pixel with its global position vg, which can be stored as an additional attribute for each triangle vertex. By default, each of these attributes is interpolated during rasterization and, thus, can be accessed when calculating the color of each pixel in I.
The straight projection line can be constructed given
vg and the projection center
c. To calculate the intersection between the line and the globe (modeled as a sphere), the equation provided by Reference [
9] is used. In the case of two intersections, the position closest to the projection surface is chosen; in the case of no intersection, the pixel is colored gray.
Determining the pixel color based on the position of the intersection is carried out by sampling a texture, i.e., an image that can be referenced using the 2D normalized coordinates u, v ∈ [0, 1]. Probably the simplest way to retrieve such normalized coordinates based on an intersection point is as follows: firstly, the 3D coordinates with x, y, z ∈ [−1, 1] of the intersection point have to be converted into 3D spherical coordinates with inclination θ ∈ [0, π], azimuth φ ∈ [−π, π], and radius r = 1. Normalizing both, θ and φ, to the range [0, 1] yields an exact mapping to the required texture coordinates u, v. This direct mapping of spherical coordinates to Cartesian coordinates requires the texture to depict the earth in the equirectangular projection. Sampling is carried out using anisotropic filtering to ensure a crisp image (see, e.g., Reference [
10] for more details). A texture can contain any information of interest, such as the globe’s topography, the geographic grid, or Tissot’s indicatrices. Overlaying different textures can be achieved by blending the colors from each texture sample.
Flattening and scaling the projection surface effectively changes the global vertex positions and, hence, the projection procedure using vl will lead to undesirable results. Therefore, before flattening the surface, the local coordinates vl are saved as an auxiliary attribute vlr, which consequently remains unchanged when the surface is flattened and scaled. The calculation of the intersection point is then carried out using vgr, which is calculated by applying MM on vlr. Since vgr is known in all states, it is possible to investigate the effects of a modified light source even if the surface is already flattened or scaled.
6. Prototype
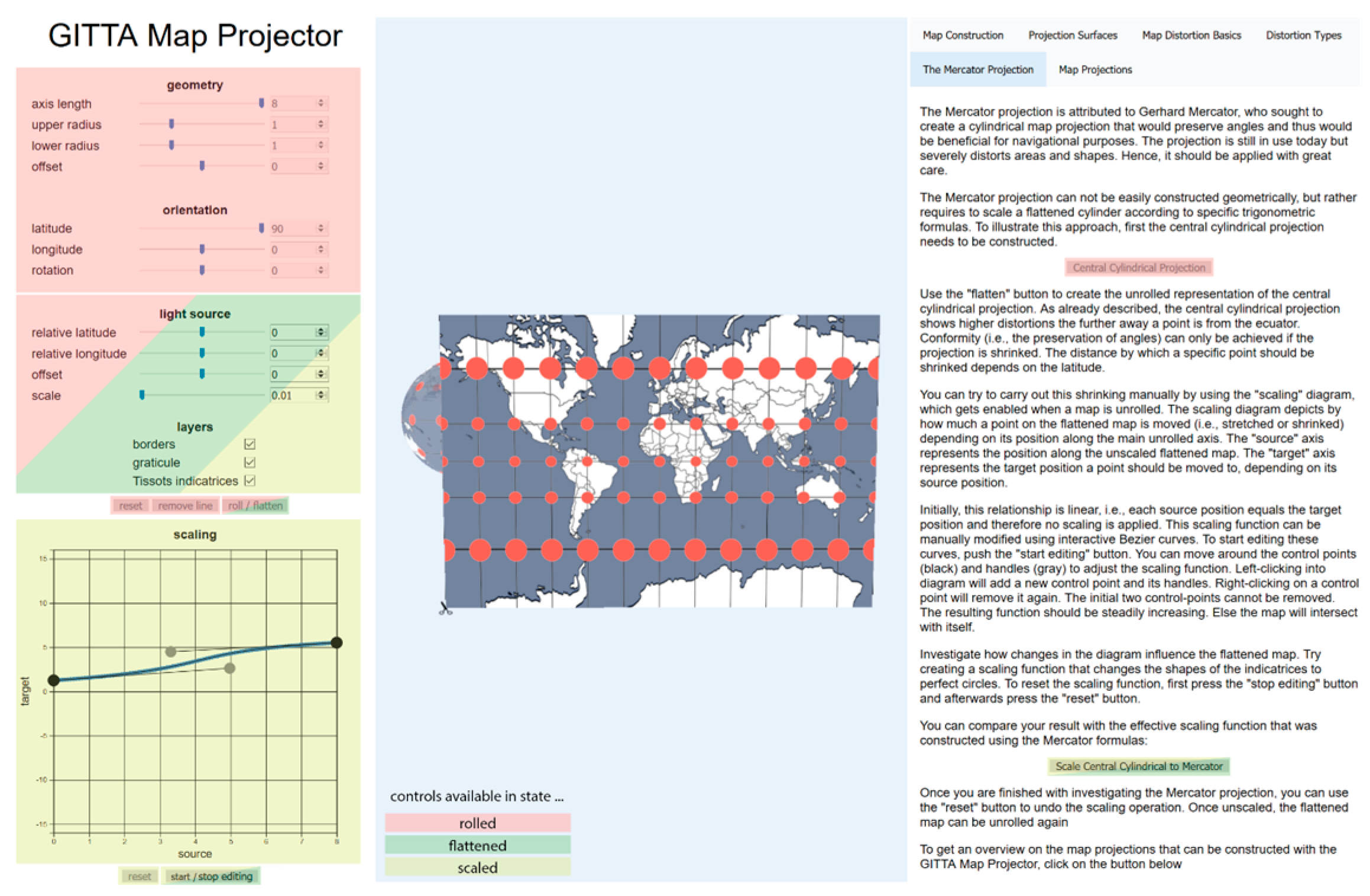
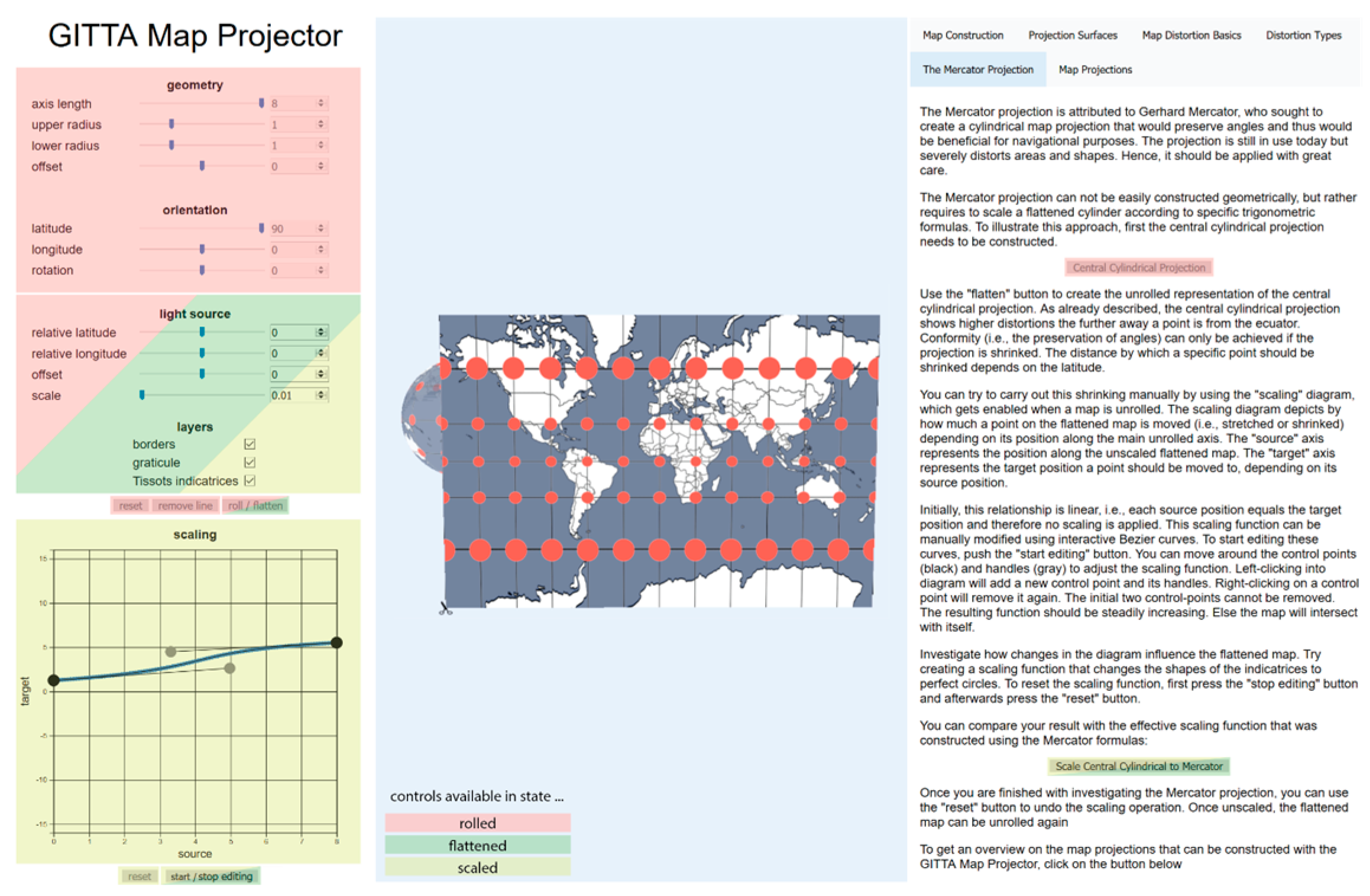
The proposed visualization concept was implemented in a prototypical educational tool to allow unguided and guided exploration of the map construction process in a comprehensive and interactive manner. Its central 3D view shows the arrangement of the required objects: the projection surface, the light source, and the globe.
Figure 6 shows the prototype in the final “scaled” state. This state was constructed by first creating the central cylindrical projection in the “rolled” state, then unrolling the surface to obtain the “flattened” state, and finally by manually scaling the flattened surface to approximate the Mercator projection, representing the “scaled” state.
On the left side, a control panel allows changing the configuration in the 3D view and toggling the transition from one state (see
Figure 3) to another. The initial state is “rolled”. The available options during this state primarily consist of controls to modify the shape of the projection surface (“geometry”) and to change its orientation in respect to the globe (“orientation”), as well as buttons to create the default gnomonic azimuthal projection by pushing the “reset” button and to remove projection lines using the “remove line” button. To trigger the transformation state, the “flatten” button will result in an animated flattening. At the end of this animation, the state “flattened” is obtained. The button formerly labeled “flatten” will change to “roll”, allowing to move back from the “flattened” state to the “rolled” state. The “scaled” state can be obtained by pushing the “start editing” button, which allows manually scaling the flat map using Bézier curves. More Bézier curves can be added by left-clicking into the widget. They can be removed by right-clicking them. Returning to the “flattened” state requires resetting any applied scaling using the “reset” button below the scaling widget.
For all states, the “light source” and “layers” controls are available as their changes can be directly propagated through all states without any limitations. It is, however, advisable to use them primarily in the “rolled” state as this gives a better visual impression on their effects.
These controls provide high flexibility in exploring different map projections. Guided exploration is supported via the tutorial on the right side of the application. The textual explanations are complemented with buttons that dynamically adapt the control options on the left (and, thus, the objects in the 3D view) to showcase important aspects. These buttons are enabled/disabled according to the state in which they actually make sense. For example, scaling to the Mercator projection only makes sense when the application is in the “flattened” or “scaled” state. As such it is disabled in the “rolled” state. Additionally, a (non-comprehensive) list of map projections is provided in the tutorial, which allows automatically creating the respective arrangements of the light source and the projection surface.
The prototype was implemented using common web technologies HTML, CSS, JavaScript and the libraries three.js for the 3D view and D3.js for the scaling widget. The rendering procedure was implemented in GLSL.
7. Discussion
The prototype illustrates that the proposed way of constructing map projections based on a real-time implementation of the light source metaphor is feasible and, as such, complements the more conventional approach of existing libraries based on tailored formulas. Although it is believed that this approach can bring great benefits specifically in high-school and academic undergraduate teaching, quantitative evidence for this assumption is still missing and would require a thorough study. The number of different parameters that need to be adapted to obtain a specific map projection can be overwhelming and might even increase if more map projections should be supported. Hence, it might be necessary to simplify the user interface to make it more approachable, especially for younger students. At the time of writing, a first basic version simplifying the user interface is available at
https://gevian.github.io/GITTA-MP/basic.html.
Another limitation is the number of supported features. For example, some popular map projections require projection arcs rather than projection lines (e.g., Plate Carrée or Lambert’s azimuthal equal area projection). The scaling is limited to the vertical stripe axis. Some interesting map projections (such as those of the pseudo-cylindrical family) require more complex scaling operations. Both features require some effort to be implemented, but are considered worthy additions, especially to support projections such as the novel Equal Earth projection [
11]. Relatively exotic map projections (e.g., Myriahedral [
12]) have specific requirements such as multiple interruptions, which would require more advanced mesh manipulation instruments. Yet, the rendering mechanism can be applied to arbitrary geometrical surfaces, which should make the integration of such projections feasible.
One fundamental advantage of the proposed solution is the possibility to explore different configurations of the light source and the projection surface, as well as subsequently applying scaling functions. This allows interactively investigating uncommon configurations and, thus, potentially discovering entirely new map projections. A major caveat of this approach lies in the issue that the underlying formulas (and, thus, the distortion properties) cannot be directly provided by the application. Rather, the user would need to reconstruct the projection formulas based on the visualization and settings as there is currently no mechanism that automatically derives the analytical projection formulas.
When able to arbitrarily shape light sources, the question arises if light sources can be formed in such a way as to avoid a final scaling step. This question cannot be answered right away and needs further investigation; however, being able to show as many projections as possible using the light source metaphor would further underline the usefulness of this interactive map projection instruction tool.
8. Conclusions
Allowing interactively constructing map projections in a 3D environment as provided by the described projection tool goes beyond the common static approaches provided by conventional educational resources. As such, it is believed that it can contribute to the understanding of map projections, especially for undergraduate and high-school students. In addition, it can bring benefits to cartography experts as it allows an easy way to recapitulate common map projections and to investigate uncommon configurations, eventually leading to the discovery of new map projections. Several limitations (e.g., uniaxial scaling, no projection arcs) currently restrict the number of constructible map projections supported by the described prototype. It is aimed to gradually address these limitations to include the majority of common map projections and, thus, to provide a comprehensive demonstration tool that is freely and easily accessible to a wide range of academic institutions.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}