

Evacuation Behavioural Instructions with 3D Motions: Insights from Three Use Cases


_Lee.png)
Abstract
1. Introduction
2. Related Work
2.1. Evacuation Training and Exercises
2.2. Evacuation Simulation Models for 3D Motions
2.3. Three-Dimensional Indoor Models for Evacuation Simulations
3. Method
3.1. Simulation Models
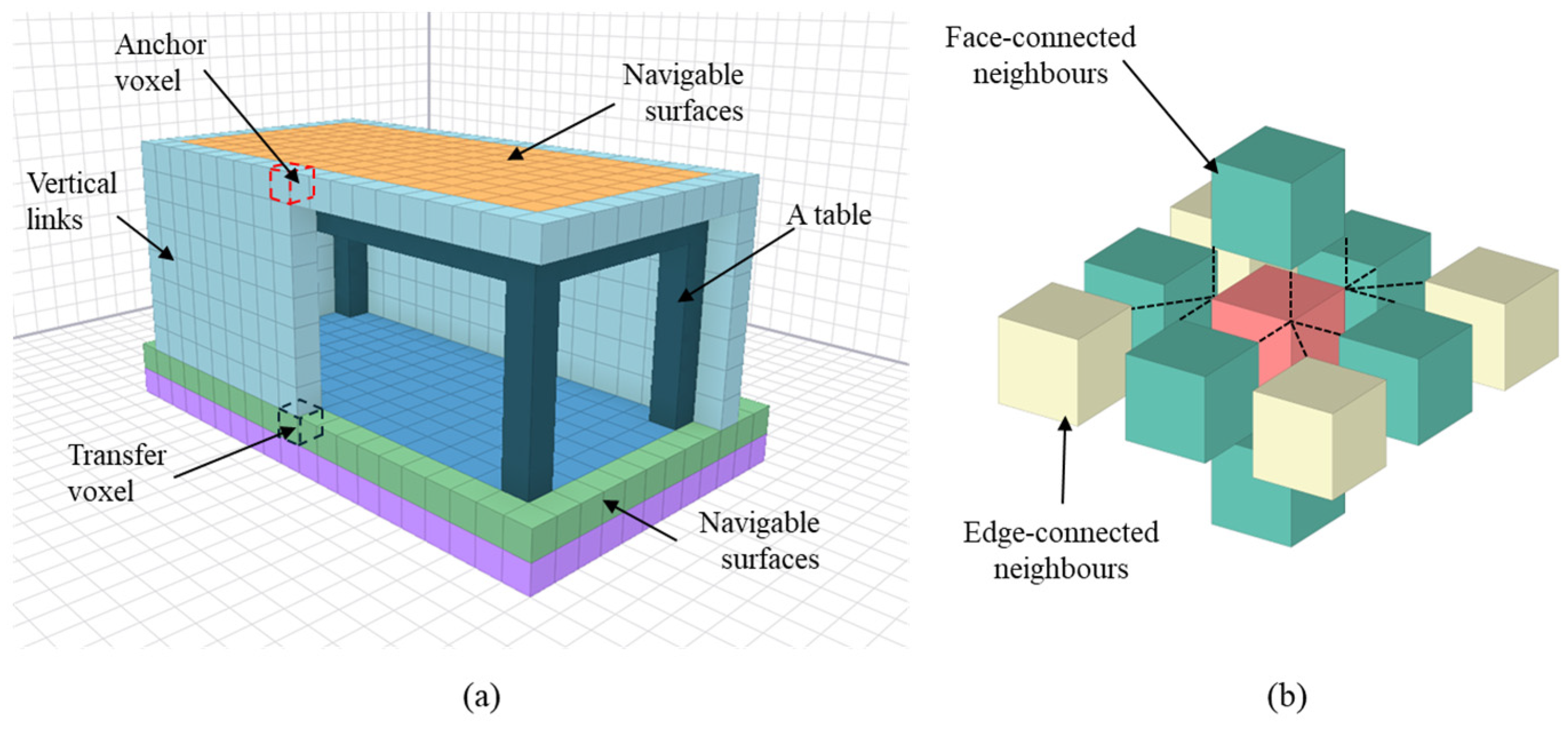
- A voxel-based 3D indoor model that consists of indoor objects, navigable surfaces, and vertical links.
- An agent-based model that specifies pre-defined rules governing different stages to perform 3D motions.
3.2. Assumptions Made for the Simulations
- All simulated agents are assumed to possess prior knowledge of the building layout, including the locations of exits and corridors. This eliminates the need for agents to explore indoor environments, reducing variability due to learning or hesitation [49].
- The simulations exclude the impact of specific disaster scenarios (e.g., fires, earthquakes, or toxic gases). This prevents external hazards from influencing agent behaviours, such as reduced visibility due to smoke or altered motion paths from structural damage [43].
- Agents are assumed to evacuate immediately at the start of the simulations without delays due to decision-making, hesitation, or external influences [50]. This ensures that evacuation time is determined solely by agent motions, particularly 3D motions.
- Agents make independent evacuation decisions without instructions from evacuation managers or external systems. This prevents external interventions from influencing path selection, ensuring a focus on autonomous navigation [50].
- Agents are assumed to use the shortest available path to the nearest exit along predefined navigable routes [51]. This ensures that improvements in evacuation efficiency result from local 3D motion strategies rather than global path or exit adaptions.
4. Three Use Cases
4.1. Building Scenario Selection
- Building function: selecting buildings with diverse functions enables an exploration of how 3D motions may respond to distinct spatial configurations.
- Building scale: incorporating buildings of different scales enables an assessment of how 3D motions may affect evacuation in small and large buildings. This variation provides insights into behavioural instructions for different building scales.
- Crowd sizes: buildings should involve a high density of pedestrians concentrated within a single room or space rather than being dispersed randomly across different rooms. This setup allows the investigation to focus on the effects of 3D motions while minimising the influence of other factors such as exit choices.
4.2. Evacuation Scenario Setup
- (1)
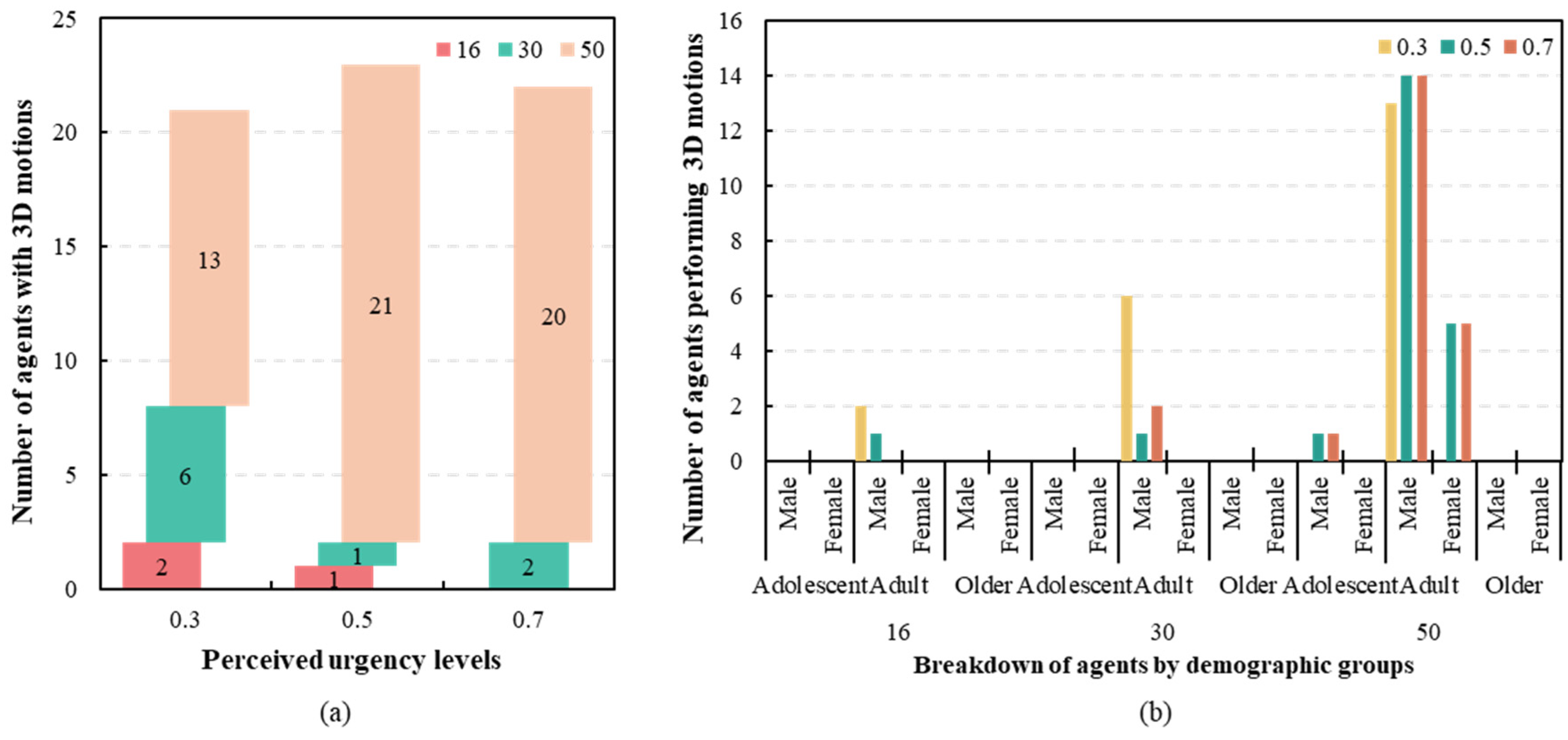
- Use case 1: Restaurant evacuation
- Small group (16 agents): representing a low-occupancy scenario.
- Medium group (30 agents): simulating a more typical occupancy level during dining hours.
- Large group (50 agents): representing a high-density scenario typical of weekends or holidays, characterised by increased congestion and motion restrictions.
- (2)
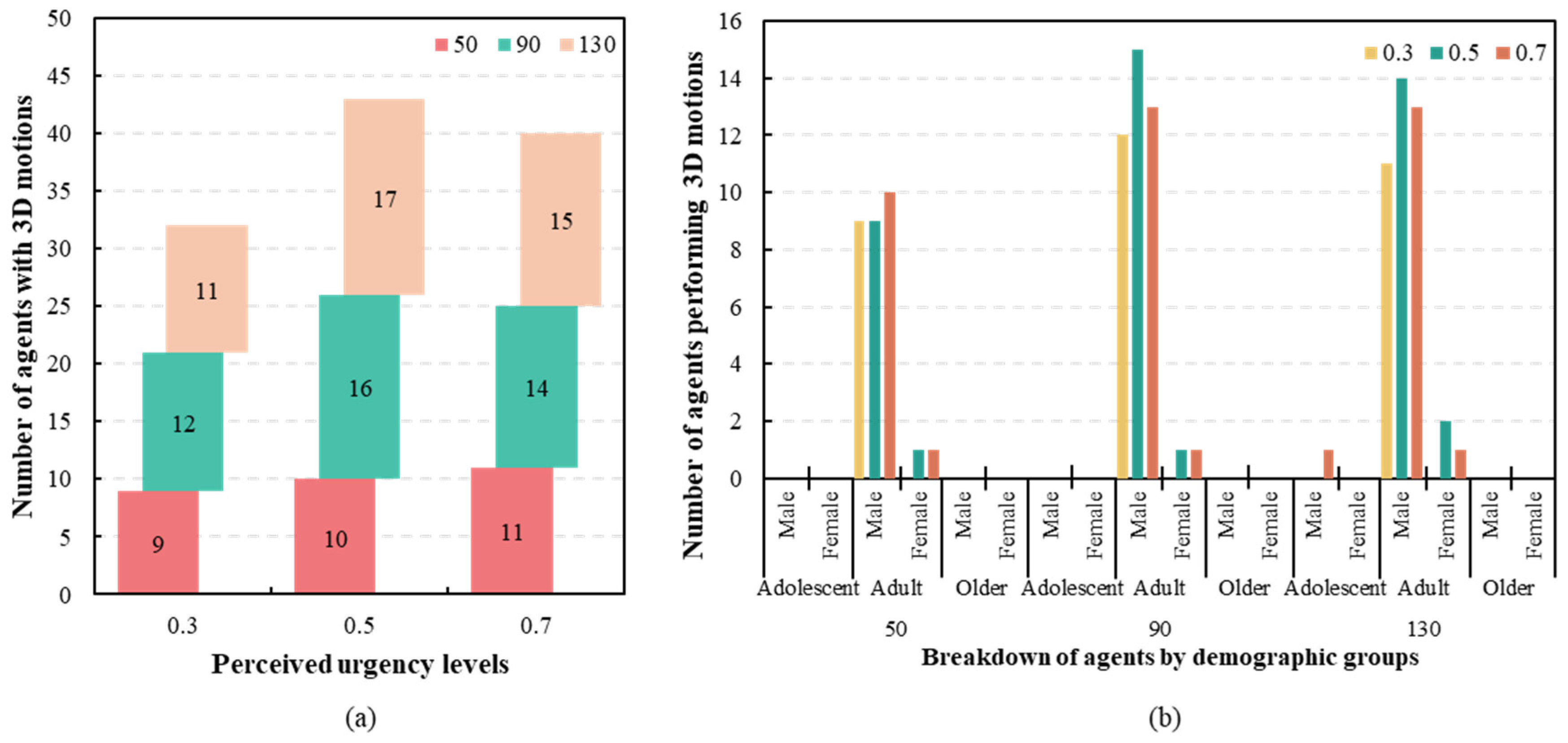
- Use case 2: Hall evacuation
- Small group (50 agents): simulating a moderate occupancy level during an event.
- Medium group (90 agents): simulating a well-attended gathering where crowd motions become more complex.
- Large group (130 agents): modelling a densely populated event with potential bottlenecks at exits.
- (3)
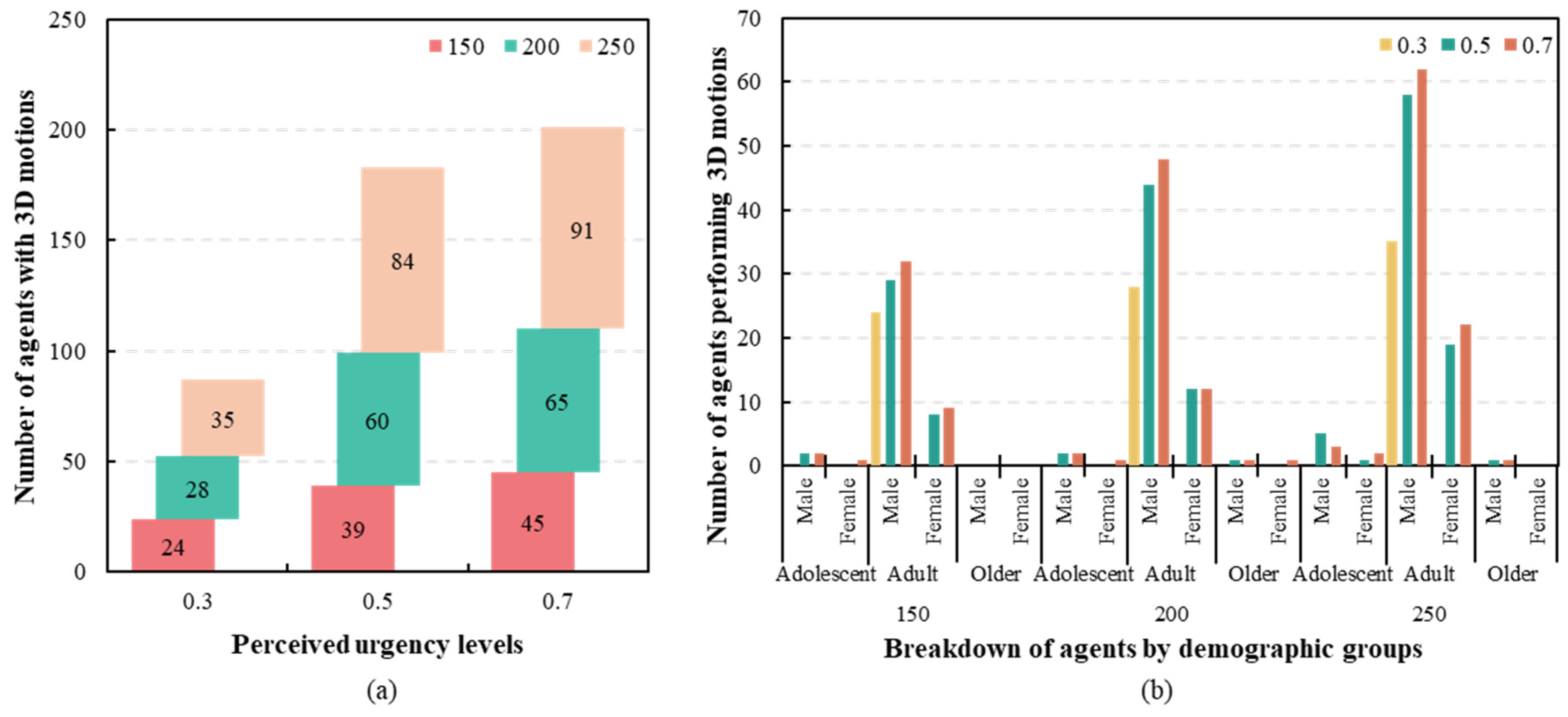
- Use case 3: Canteen evacuation
- Small group (150 agents): representing a low-occupancy scenario typical of off-peak hours.
- Medium group (200 agents): simulating a typical dining period with a high but manageable occupancy.
- Large group (250 agents): representing a high-density scenario where congestion significantly affects evacuation dynamics.
5. Results
5.1. Number of Agents Performing 3D Motions
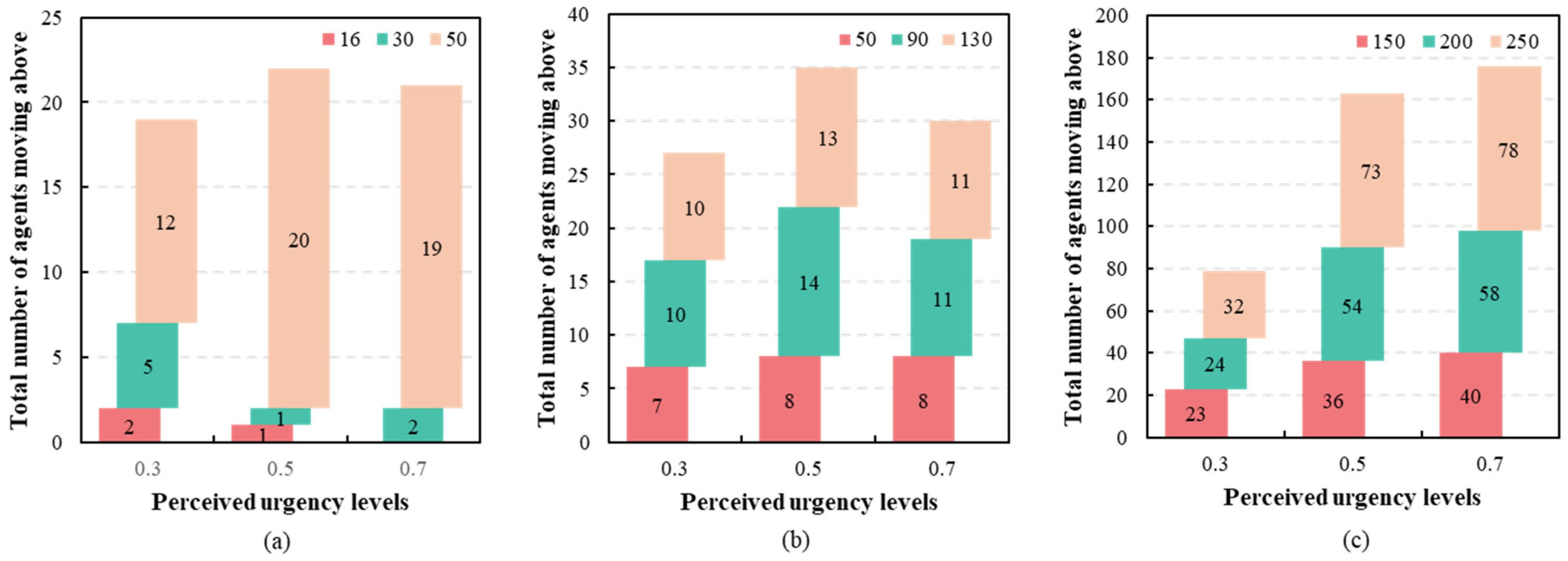
5.2. Number of Agents Moving Above
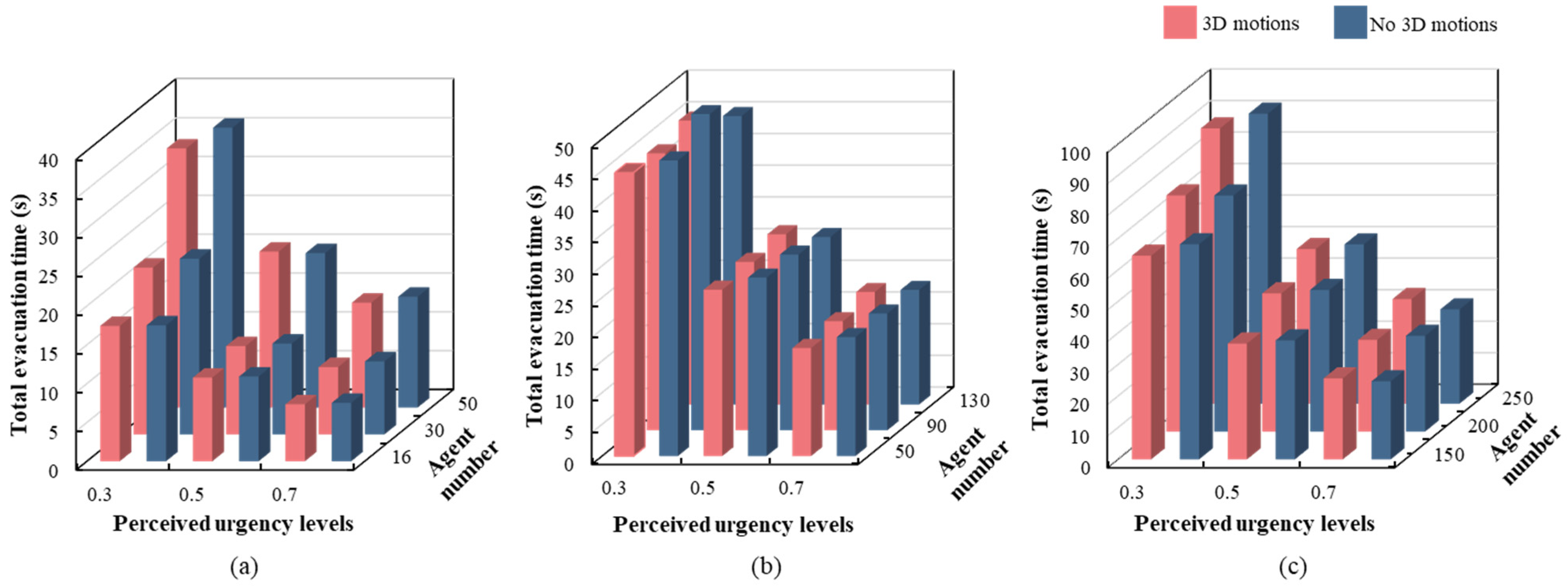
5.3. Total Evacuation Time
6. Discussions
- Conditional use of 3D motions: Pedestrians may be advised to prioritise 3D motions only when necessary to bypass localised congestion (e.g., narrow corridors or areas with furniture) rather than indiscriminately using them, as this may worsen exit congestion. Specifically, the following should be considered:
- In confined indoor environments with few movable objects (e.g., restaurants and pubs), 3D motions may be used sparingly, as their benefits are possibly limited except in scenarios with higher urgency and a larger number of pedestrians. Instead, directing pedestrians towards unobstructed exits may be more appropriate.
- In moderately complex indoor environments with a certain level of pedestrian number (e.g., halls and stores), it is possible that 3D motions may help navigate temporary congestion points, particularly near furniture.
- In large, high-density environments (e.g., canteens and exhibition centres), 3D motions are likely to alleviate local congestion, but exits may be carefully managed to prevent severe congestion at exits.
- Tailoring behavioural instructions to demographics as follows:
- It is possible that adults may benefit from targeted training to improve their motion capability and minimise unnecessary congestion near exits.
- Further investigation is warranted into whether older adults need to be provided with clear evacuation paths that reduce the use of 3D motions for possibly safer and more accessible evacuation routes.
- Whether adolescents require training on when and how to effectively use such motions may need exploration to enhance evacuation efficiency without compromising safety.
- Further investigation is needed into evacuation behaviours of parents with children and of groups such as couples or friends to prioritise safer routes and reduce the reliance on 3D motions.
7. Conclusions
- Conduct real-world experiments and collect empirical data regarding the parameters used in the agent-based model to enable in-depth validation.
- Integrate with dynamic exit/path choice models and perform simulations in more complex and diverse indoor environments, such as multi-level buildings.
- Investigate how age, gender, mobility constraints, and psychological stress levels affect the likelihood of individuals using 3D motions during evacuations.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | Three-dimensional |
| PULs | Perceived urgency levels |
| CA | Cellular automata |
| IFC | Industry Foundation Classes |
| TET | Total evacuation time |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Quantity | Values for Adolescents Male/Female | Values for Adults Male/Female | Values for Older Adults Male/Female |
|---|---|---|---|---|
| Maximum speed of walking upright | 4 m/s/3 m/s | 5 m/s/4 m/s | 3 m/s/2 m/s | |
| Minimum speed of walking upright | 1 m/s/0.5 m/s | 1 m/s/0.8 m/s | 0.5 m/s/0.5 m/s | |
| Maximum speed of bent-over walking | 3 m/s/2 m/s | 4 m/s/3 m/s | 1.5 m/s/1 m/s | |
| Maximum speed of knee and hand crawling | 1.5 m/s/1 m/s | 2 m/s/1.5 m/s | 1 m/s/0.5 m/s | |
| Maximum speed of low crawling | 1 m/s/0.5 m/s | 1.5 m/s/1 m/s | 0.5 m/s/0.3 m/s | |
| . | Speeds of stepping up/down, jumping up/down and climbing up/down | 4 m/s/3 m/s | 5 m/s/4 m/s | 2 m/s/1 m/s |
| , , , | Effect weights of PULs on the desired speeds of walking upright, bent-over walking, knee and hand crawling, low crawling | * 0.9/0.9 | * 1/1 | * 0.8/0.8 |
| Local density range of other agents to affect if an agent performs 3D motions | * [2, 3.5]/[2, 3.5] ped/m2 | * [1.5, 4]/[1.5, 4] ped/m2 | * [2.5, 3.5]/[2.5, 3.5] ped/m2 | |
| R * | Radius from an agent’s footprint centre to detect other agents | * 0.8 m/0.6 m | * 1 m/0.8 m | * 0.6 m/0.4 m |
| Density threshold of other ahead agents to affect if an agent performs 3D motions | * 3.5/4 ped/m2 | * 3/3.5 ped/m2 | *4/4.5 ped/m2 | |
| , , | Distance, angle and eye height of an agent’s visibility | * 2.5 m, 120°, 155 cm/2.5 m, 120°, 145 cm | *3 m, 120°, 170 cm/3 m, 120°, 160 cm | *2 m, 100°, 160 cm/2 m, 100°, 155 cm |
| Radius between an agent and an M-object to influence if perform 3D motions | * 1 m/0.7 m | * 1.5 m/1.2 m | * 1 m/0.7 m | |
| Threshold of PULs to control if an agent is eligible to perform 3D motions | * 0.4/0.5 | * 0.3/0.4 | * 0.5/0.6 | |
| Probability of performing 3D motions, influenced by other agents who surround an agent | * 0.5/0.4 | * 0.6/0.5 | * 0.4/0.3 | |
| . | Probability of performing 3D motions, influenced by other ahead agents through an agent’s visibility | * 0.5/0.4 | * 0.6/0.5 | * 0.4/0.3 |
| Probability of performing 3D motions, influenced by an agent’s minimum desired speed | * 0.5/0.4 | * 0.6/0.5 | * 0.4/0.3 | |
| Probability of moving up | * 0.7/0.6 | * 0.8/0.7 | * 0.6/0.5 | |
| Radius within which an agent detects another agent moving up. | * 0.4 m/0.5 m | * 0.4 m/0.3 m | * 0.5 m/0.6 m | |
| Acceleration time of an agent | 0.5 s | 0.5 s | 0.5 s | |
| Radius of an agent | 0.2 m/0.2 m | 0.25 m/0.25 m | 0.2 m/0.2 m | |
| Mass of an agent | 55 kg/45 kg | 70 kg/55 kg | 65 kg/50 kg | |
| Parameter for repulsive force of an agent | 2000 | 2000 | 2000 | |
| Parameter for repulsive force of an agent | 0.08 | 0.08 | 0.08 | |
| Parameter for squeeze force of an agent | 1.2 × 105 | 1.2 × 105 | 1.2 × 105 | |
| Parameter for squeeze force of an agent | 2.4 × 105 | 2.4 × 105 | 2.4 × 105 | |
| Parameter for horizontal attraction force of an agent | * 1.2 × 105 | * 1.2 × 105 | * 1.2 × 105 | |
| Parameter for vertical interaction force of an agent | * 0.05 | * 0.05 | * 0.05 |
References
- Xie, R.; Zlatanova, S.; Lee, J.B. 3D indoor-pedestrian interaction in emergencies: A review of actual evacuations and simulation models. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Sydney, Australia, 19–21 October 2022; pp. 183–190. [Google Scholar] [CrossRef]
- Xie, R.; Zlatanova, S.; Lee, J.B.; Aleksandrov, M. A motion-based conceptual space model to support 3D evacuation simulation in indoor environments. Int. J. Geo Inf. 2023, 12, 494. [Google Scholar] [CrossRef]
- Haghani, M.; Yazdani, M. How simple behavioural modifications can influence evacuation efficiency of crowds: Part 1. Decision making of individuals. Transp. Res. Part C Emerg. Technol. 2024, 166, 104763. [Google Scholar] [CrossRef]
- Haghani, M. Optimising crowd evacuations: Mathematical, architectural and behavioural approaches. Saf. Sci. 2020, 128, 104745. [Google Scholar] [CrossRef]
- Ma, Y.; Yuen, R.K.K.; Lee, E.W.M. Effective leadership for crowd evacuation. Phys. A Stat. Mech. Its Appl. 2016, 450, 333–341. [Google Scholar] [CrossRef]
- Catal, C.; Akbulut, A.; Tunali, B.; Ulug, E.; Ozturk, E. Evaluation of augmented reality technology for the design of an evacuation training game. Virtual Real. 2020, 24, 359–368. [Google Scholar] [CrossRef]
- Wang, P.; Cao, S. Simulation of pedestrian evacuation strategies under limited visibility. Phys. Lett. A 2019, 383, 825–832. [Google Scholar] [CrossRef]
- Wang, K.; Fu, Z.; Li, Y.; Qian, S. Influence of human-obstacle interaction on evacuation from classrooms. Autom. Constr. 2020, 116, 103234. [Google Scholar] [CrossRef]
- Peacock, R.D.; Hoskins, B.L.; Kuligowski, E.D. Overall and local movement speeds during fire drill evacuations in buildings up to 31 stories. Saf. Sci. 2012, 50, 1655–1664. [Google Scholar] [CrossRef]
- Jiang, R.; Wang, Y.; Xie, R.; Zhou, T.; Wang, D. Effect of stairway handrails on pedestrian fatigue and speed during ascending evacuation. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2022, 8, 6022001. [Google Scholar] [CrossRef]
- Xie, R.; Pan, Y.; Zhou, T.; Ye, W. Smart safety design for fire stairways in underground space based on the ascending evacuation speed and BMI. Saf. Sci. 2020, 125, 104619. [Google Scholar] [CrossRef]
- Shiwakoti, N.; Sarvi, M.; Rose, G.; Burd, M. Animal dynamics based approach for modeling pedestrian crowd egress under panic conditions. Transp. Res. Part B Methodol. 2011, 45, 1433–1449. [Google Scholar] [CrossRef]
- Şahin, C.; Rokne, J.; Alhajj, R. Human behavior modeling for simulating evacuation of buildings during emergencies. Phys. A Stat. Mech. Its Appl. 2019, 528, 121432. [Google Scholar] [CrossRef]
- Zlatanova, S.; Holweg, D. 3D Geo-information in emergency response: A framework. In Proceedings of the Fourth International Symposium on Mobile Mapping Technology, Kunming, China, 29–31 March 2004; Available online: https://www.gdmc.nl/publications/2004/3D_Geo-information_Emergency_Response.pdf (accessed on 1 May 2025).
- Russo, F.; Rindone, C. Methods for risk reduction: Training and exercises to pursue the planned evacuation. Sustainability 2024, 16, 1474. [Google Scholar] [CrossRef]
- Menzemer, L.W.; Ronchi, E.; Karsten, M.M.V.; Gwynne, S.; Frederiksen, J. A scoping review and bibliometric analysis of methods for fire evacuation training in buildings. Fire Saf. J. 2023, 136, 103742. [Google Scholar] [CrossRef]
- Astarita, V.; Guido, G.; Haghshenas, S.S.; Haghshenas, S.S. Risk reduction in transportation systems: The role of digital twins according to a bibliometric-based literature review. Sustainability 2024, 16, 3212. [Google Scholar] [CrossRef]
- Russo, F.; Rindone, C.; Trecozzi, M.R. The role of training in evacuation. In Proceedings of the 8th International Conference on Simulation in Risk Analysis and Hazard Mitigation, Island of Brac, Croatia, 19–21 September 2012; pp. 491–502. [Google Scholar] [CrossRef]
- Feng, Z.; González, V.A.; Amor, R.; Spearpoint, M.; Thomas, J.; Sacks, R.; Lovreglio, R.; Cabrera-Guerrero, G. An immersive virtual reality serious game to enhance earthquake behavioral responses and post-earthquake evacuation preparedness in buildings. Adv. Eng. Inform. 2020, 45, 101118. [Google Scholar] [CrossRef]
- Sime, J.D. Movement towards the familiar: Person and place affiliation in a fire entrapment setting. Environ. Behav. 1985, 17, 697–724. [Google Scholar] [CrossRef]
- Kinateder, M.T.; Kuligowski, E.D.; Reneke, P.A.; Peacock, R.D. Risk perception in fire evacuation behavior revisited: Definitions, related concepts, and empirical evidence. Fire Sci. Rev. 2015, 4, 1. [Google Scholar] [CrossRef]
- Guo, N.; Ding, J.; Ding, Z.; Zhu, K.; Wu, C. Crawling evacuation from a room: Experiment and modeling. J. Stat. Mech. Theory Exp. 2021, 3, 033415. [Google Scholar] [CrossRef]
- Liu, Q.; Lu, L.; Zhang, Y.; Hu, M. Modeling the dynamics of pedestrian evacuation in a complex environment. Phys. A Stat. Mech. Its Appl. 2022, 585, 126426. [Google Scholar] [CrossRef]
- Zheng, Y.; Jia, B.; Li, X.; Jiang, R. Evacuation dynamics considering pedestrians’ movement behavior change with fire and smoke spreading. Saf. Sci. 2017, 92, 180–189. [Google Scholar] [CrossRef]
- Tugarinov, M.M.A.; Shulga, I.D.; Yurchenko, E.A.; Ermakov, A.D. 3D-simulation of emergency evacuation. J. Phys. Conf. Ser. 2020, 1680, 12052. [Google Scholar] [CrossRef]
- Tang, F.; Ren, A. GIS-based 3D evacuation simulation for indoor fire. Build. Environ. 2012, 49, 193–202. [Google Scholar] [CrossRef]
- Xie, R.; Zlatanova, S.; Lee, J. 3D indoor environments in pedestrian evacuation simulations. Autom. Constr. 2022, 144, 104593. [Google Scholar] [CrossRef]
- Aleksandrov, M.; Heslop, D.J.; Zlatanova, S. 3D indoor environment abstraction for crowd simulations in complex buildings. Buildings 2021, 11, 445. [Google Scholar] [CrossRef]
- Boguslawski, P.; Zlatanova, S.; Gotlib, D.; Wyszomirski, M.; Gnat, M.; Grzempowski, P. 3D building interior modelling for navigation in emergency response applications. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103066. [Google Scholar] [CrossRef]
- Thunderhead Engineering, Pathfinder Technical Reference Manual 2020. Available online: https://support.thunderheadeng.com/docs/pathfinder/2020-1/ (accessed on 9 May 2022).
- Oasys, Massmotion Help Guide 2019. Available online: https://www.oasys-software.com/wp-content/uploads/2019/06/MassMotion-10.0-Help-Guide.pdf (accessed on 9 May 2022).
- Gorte, B.; Aleksandrov, M.; Zlatanova, S. Towards egress modelling in voxel building models. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Kuala Lumpur, Malaysia, 1–3 October 2019; pp. 43–47. [Google Scholar] [CrossRef]
- Xiong, Q.; Zhu, Q.; Du, Z.; Zhu, X.; Zhang, Y.; Niu, L.; Li, Y.; Zhou, Y. A dynamic indoor field model for emergency evacuation simulation. ISPRS Int. J. Geo Inf. 2017, 6, 104. [Google Scholar] [CrossRef]
- Diakite, A.A.; No, L.D.I.A.-V.; Biljecki, F.; Isikdag, U.; Simmons, S.; Li, K.; Zlatanova, S. IFC2IndoorGML: An open-source tool for generating IndoorGML from IFC. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Nice, France, 6–11 June 2022; pp. 295–301. [Google Scholar] [CrossRef]
- Deng, H.; Tian, M.; Ou, Z.; Deng, Y. A semantic framework for on-site evacuation routing based on awareness of obstacle accessibility. Autom. Constr. 2022, 136, 104154. [Google Scholar] [CrossRef]
- Kim, H.; Han, S. Crowd evacuation simulation using active route choice model based on human characteristics. Simul. Model. Pract. Theory 2018, 87, 369–378. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Shi, H.; Zhang, L. Modeling and analyzing 3D complex building interiors for effective evacuation simulations. Fire Saf. J. 2012, 53, 1–12. [Google Scholar] [CrossRef]
- Zhao, Y.; Lu, T.; Li, M.; Wu, P. The microscopic characteristics of escape behaviours from a three-dimensional lecture theatre under conditions of good and zero visibility. Saf. Sci. 2019, 118, 641–653. [Google Scholar] [CrossRef]
- Kneidl, A.; Hartmann, D.; Borrmann, A. A hybrid multi-scale approach for simulation of pedestrian dynamics. Transp. Res. Part C Emerg. Technol. 2013, 37, 223–237. [Google Scholar] [CrossRef]
- Kneidl, A.; Borrmann, A.; Hartmann, D. Generation and use of sparse navigation graphs for microscopic pedestrian simulation models. Adv. Eng. Inform. 2012, 26, 669–680. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Dou, Z.; Zheng, X.; Cheng, Y.; Mebarki, A. A review of cellular automata models for crowd evacuation. Phys. A Stat. Mech. Its Appl. 2019, 526, 120752. [Google Scholar] [CrossRef]
- Jun, H.; Huijun, S.; Juan, W.; Xiaodan, C.; Lei, Y.; Musong, G. Experiment and modeling of paired effect on evacuation from a three-dimensional space. Phys. Lett. A 2014, 378, 3419–3425. [Google Scholar] [CrossRef]
- Wei, J.; Zhang, H.; Guo, Y.; Gu, M. Experiment of bi-direction pedestrian flow with three-dimensional cellular automata. Phys. Lett. A 2015, 379, 1081–1086. [Google Scholar] [CrossRef]
- You, L.; Zhang, C.; Hu, J.; Zhang, Z. A three-dimensional cellular automata evacuation model with dynamic variation of the exit width. J. Appl. Phys. 2014, 115, 224905. [Google Scholar] [CrossRef]
- Fichtner, F.W.; Diakité, A.A.; Zlatanova, S.; Voûte, R. Semantic enrichment of octree structured point clouds for multi-story 3D pathfinding. Trans. GIS 2018, 22, 233–248. [Google Scholar] [CrossRef]
- Staats, B.R.; Diakité, A.A.; Voûte, R.L.; Zlatanova, S. Detection of doors in a voxel model, derived from a point cloud and its scanner trajectory, to improve the segmentation of the walkable space. Int. J. Urban Sci. 2019, 23, 369–390. [Google Scholar] [CrossRef]
- Xie, R.; Zlatanova, S.; Aleksandrov, M.; Lee, J.B. A voxel-based 3D indoor model to support 3D pedestrian evacuation simulations. J. Build. Eng. 2024, 98, 111183. [Google Scholar] [CrossRef]
- Helbing, D.; Farkas, I.; Vicsek, T. Simulating dynamical features of escape panic. Nature 2000, 407, 487–490. [Google Scholar] [CrossRef]
- Chen, J.; Shi, T.; Li, N. Pedestrian evacuation simulation in indoor emergency situations: Approaches, models and tools. Saf. Sci. 2021, 142, 105378. [Google Scholar] [CrossRef]
- Lin, J.; Zhu, R.; Li, N.; Becerik-Gerber, B. How occupants respond to building emergencies: A systematic review of behavioral characteristics and behavioral theories. Saf. Sci. 2020, 122, 104540. [Google Scholar] [CrossRef]
- Ronchi, E. Developing and validating evacuation models for fire safety engineering. Fire Saf. J. 2021, 120, 103020. [Google Scholar] [CrossRef]
- Liu, L.; Li, B.; Zlatanova, S.; van Oosterom, P. Indoor navigation supported by the industry foundation classes (IFC): A survey. Autom. Constr. 2021, 121, 103436. [Google Scholar] [CrossRef]
- Xie, R.; Zlatanova, S.; Lee, J.B. Voxel size performance in 3D indoor model creation for 3D evacuation simulations. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Fremantle, Perth, WA, Australia, 22–25 October 2024; pp. 501–508. [Google Scholar] [CrossRef]
- Cao, L.; Davis, G.A.; Gallagher, S.; Schall, M.C.; Sesek, R.F. Characterizing posture and associated physiological demand during evacuation. Saf. Sci. 2018, 104, 1–9. [Google Scholar] [CrossRef]
- Kady, R.A.; Davis, J. The impact of exit route designs on evacuation time for crawling occupants. J. Fire Sci. 2009, 27, 481–493. [Google Scholar] [CrossRef]
- Wang, Q.; Song, W.; Zhang, J.; Ye, R.; Ma, J. Experimental study on knee and hand crawling evacuation for different age group students. Int. J. Disaster Risk Reduct. 2020, 48, 101613. [Google Scholar] [CrossRef]
- Dong, S.; Huang, P.; Wang, W. An optimization method for evacuation guidance under limited visual field. Phys. A Stat. Mech. Its Appl. 2022, 607, 128221. [Google Scholar] [CrossRef]
- Korhonen, M.T.; Mero, A.A.; Alen, M.; Sipilä, S.; Häkkinen, K.; Liikavainio, T.; Viitasalo, J.T.; Haverinen, M.T.; Suominen, H. Biomechanical and skeletal muscle determinants of maximum running speed with aging. Med. Sci. Sports Exerc. 2009, 41, 844–856. [Google Scholar] [CrossRef]
- Meng, Q.; Zhou, M.; Liu, J.; Dong, H. Pedestrian evacuation with herding behavior in the view-limited condition. IEEE Trans. Comput. Soc. Syst. 2019, 6, 567–575. [Google Scholar] [CrossRef]
- Papaiakovou, G.; Giannakos, A.; Michailidis, C.; Patikas, D.; Bassa, E.; Kalopisis, V.; Anthrakidis, N.; Kotzamanidis, C. The effect of chronological age and gender on the development of sprint performance during childhood and puberty. J. Strength Cond. Res. 2009, 23, 2568–2573. [Google Scholar] [CrossRef] [PubMed]
- Huang, L.; Luo, K.; Xu, J.; Xu, X.; Dong, Z. Experimental study on the elderly’s walking speed considering smoke density and visual acuity in buildings. Saf. Sci. 2021, 134, 105075. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the International Society for Photogrammetry and Remote Sensing. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, R.; Zlatanova, S.; Lee, J.; Borrmann, A. Evacuation Behavioural Instructions with 3D Motions: Insights from Three Use Cases. ISPRS Int. J. Geo-Inf. 2025, 14, 197. https://doi.org/10.3390/ijgi14050197
Xie R, Zlatanova S, Lee J, Borrmann A. Evacuation Behavioural Instructions with 3D Motions: Insights from Three Use Cases. ISPRS International Journal of Geo-Information. 2025; 14(5):197. https://doi.org/10.3390/ijgi14050197
Chicago/Turabian StyleXie, Ruihang, Sisi Zlatanova, Jinwoo (Brian) Lee, and André Borrmann. 2025. "Evacuation Behavioural Instructions with 3D Motions: Insights from Three Use Cases" ISPRS International Journal of Geo-Information 14, no. 5: 197. https://doi.org/10.3390/ijgi14050197
APA StyleXie, R., Zlatanova, S., Lee, J., & Borrmann, A. (2025). Evacuation Behavioural Instructions with 3D Motions: Insights from Three Use Cases. ISPRS International Journal of Geo-Information, 14(5), 197. https://doi.org/10.3390/ijgi14050197