Hybrid Solar-RF Energy Harvesting Systems for Electric Operated Wheelchairs


 ,
,  ,
,
Abstract
1. Introduction
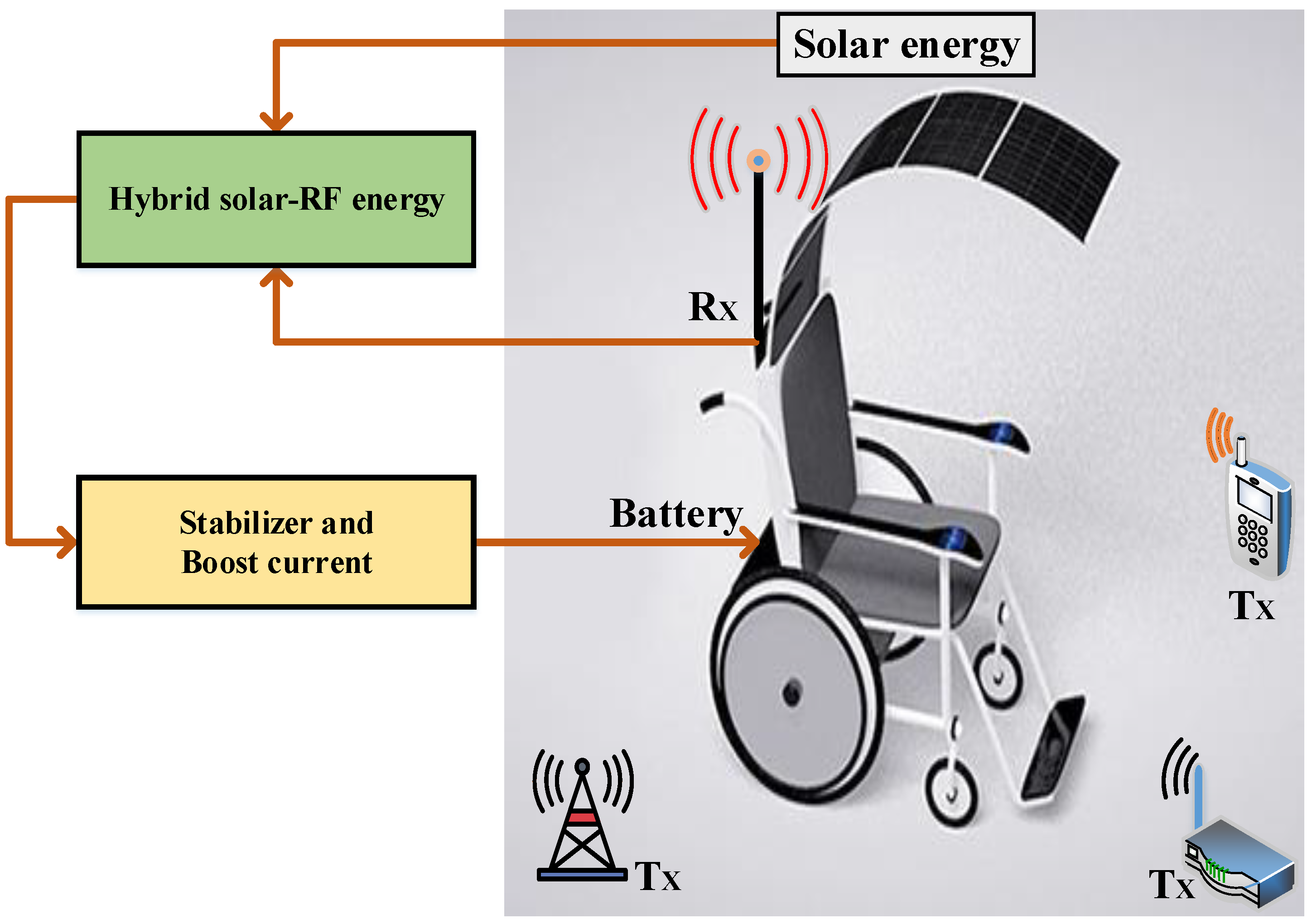
2. System Model
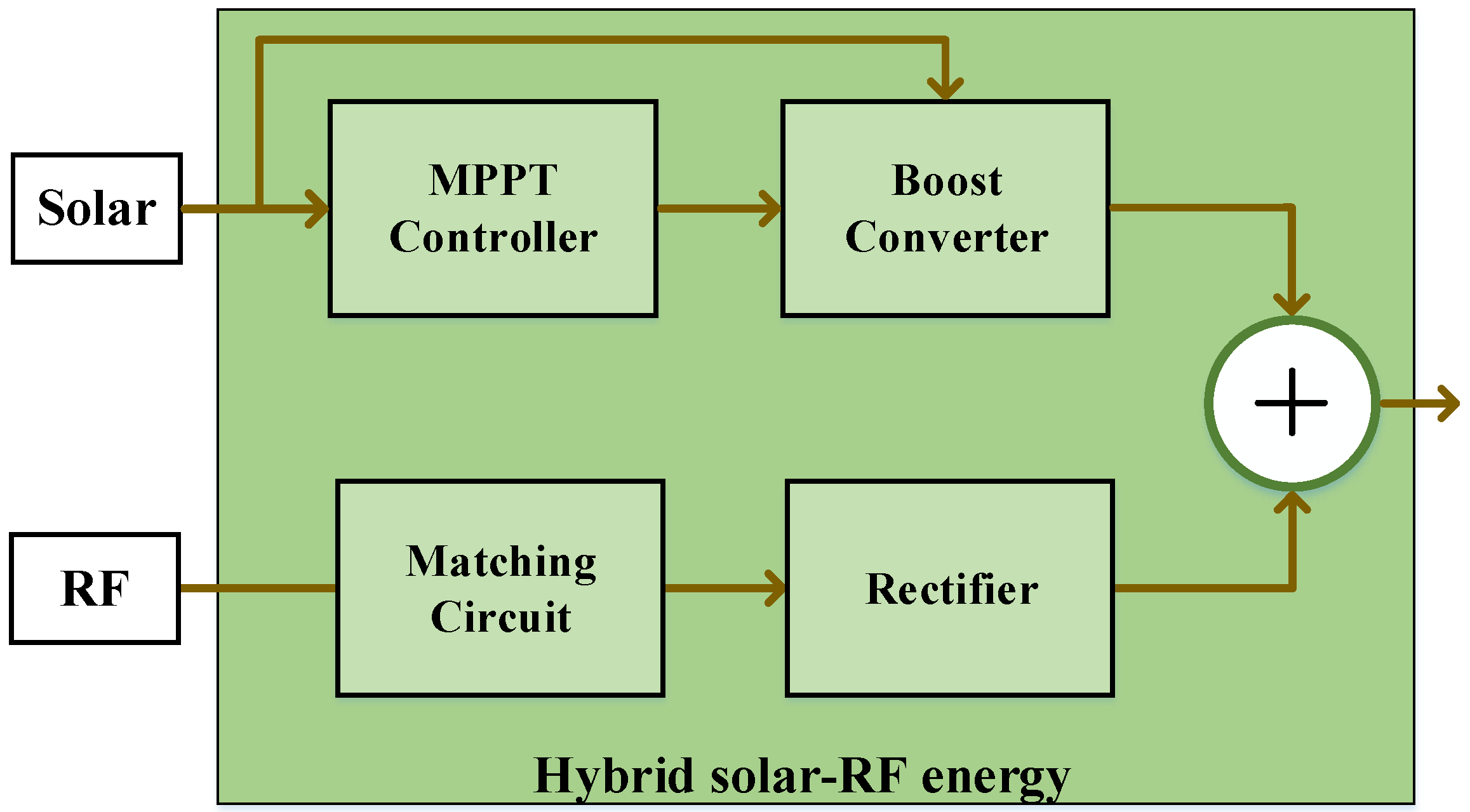
3. The Hybrid Solar-Rf Harvesting Energy System
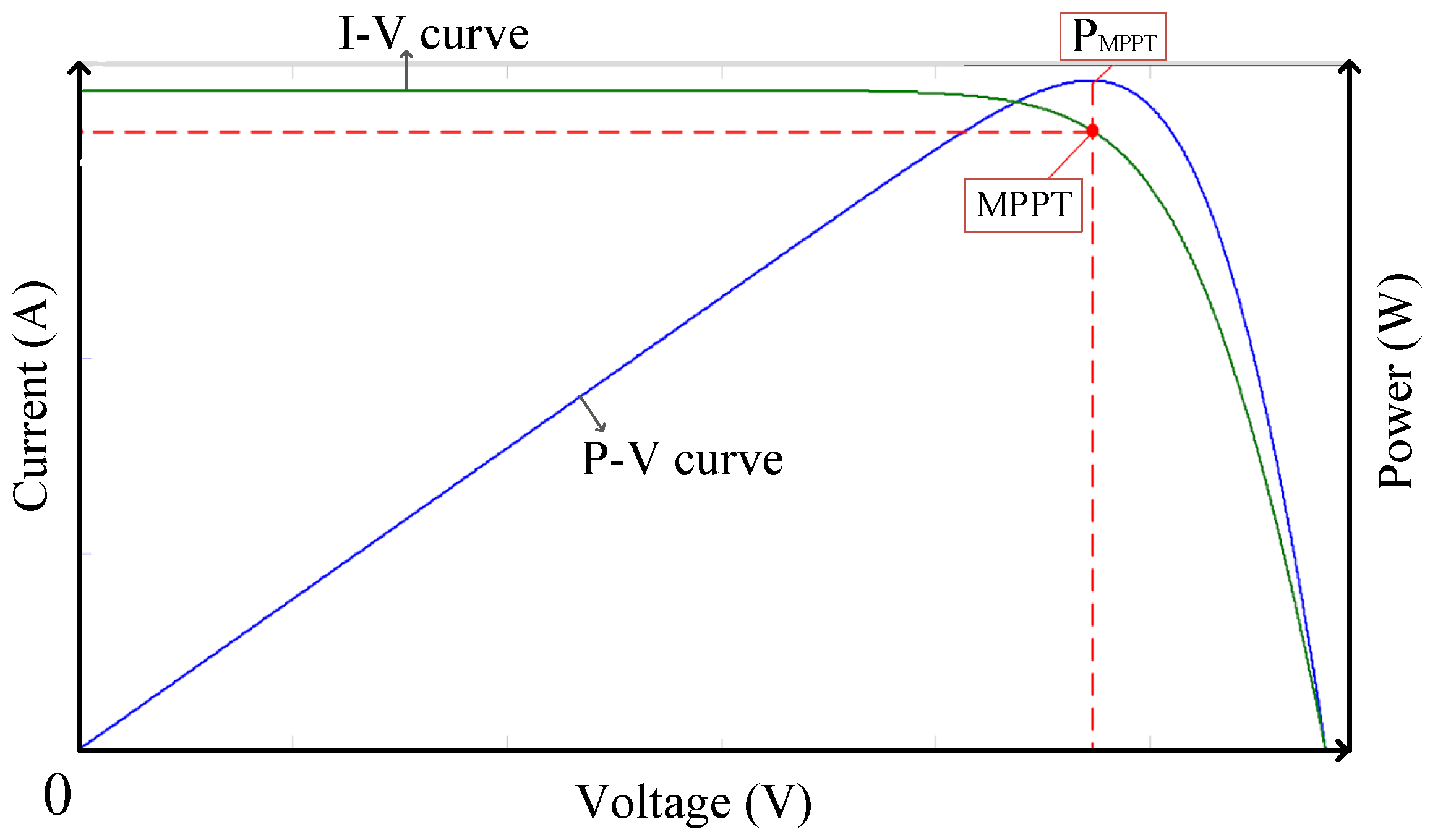
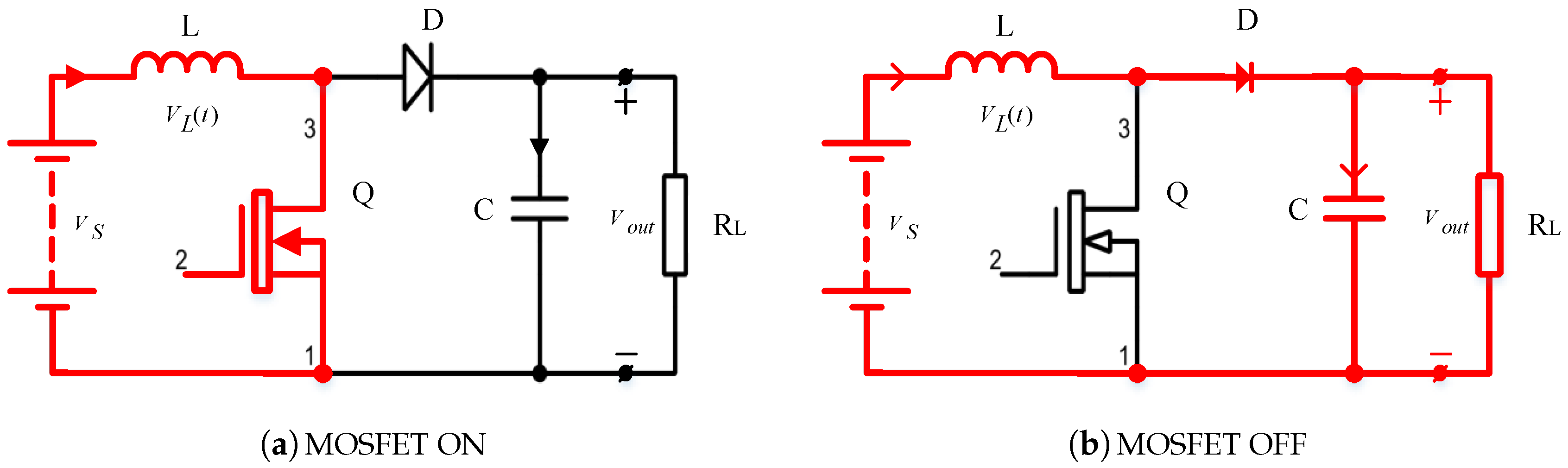
3.1. Solar Energy Module
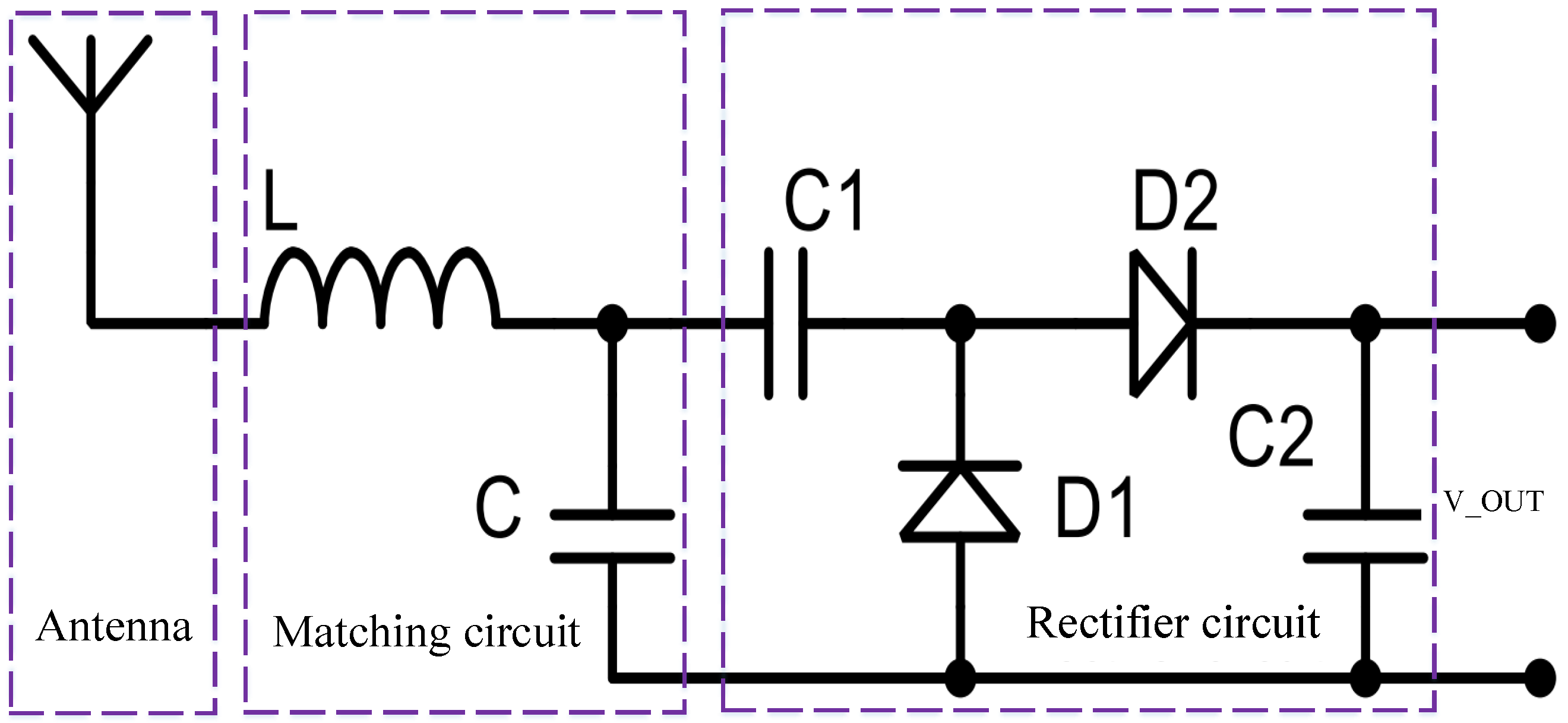
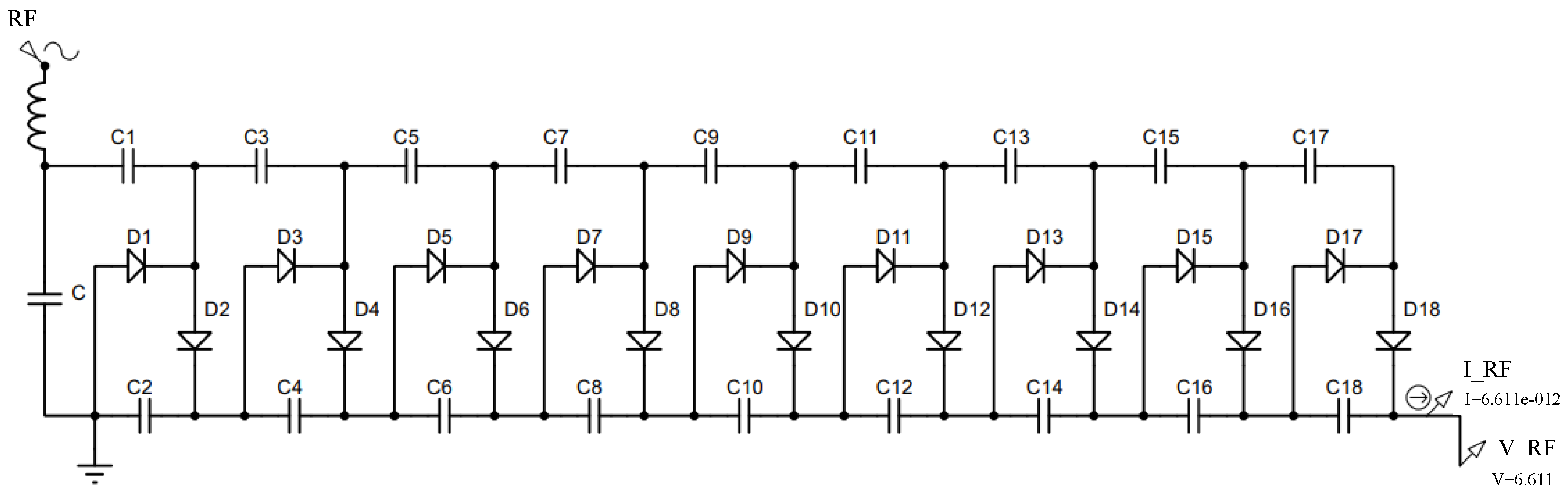
3.2. Radio Frequency Energy
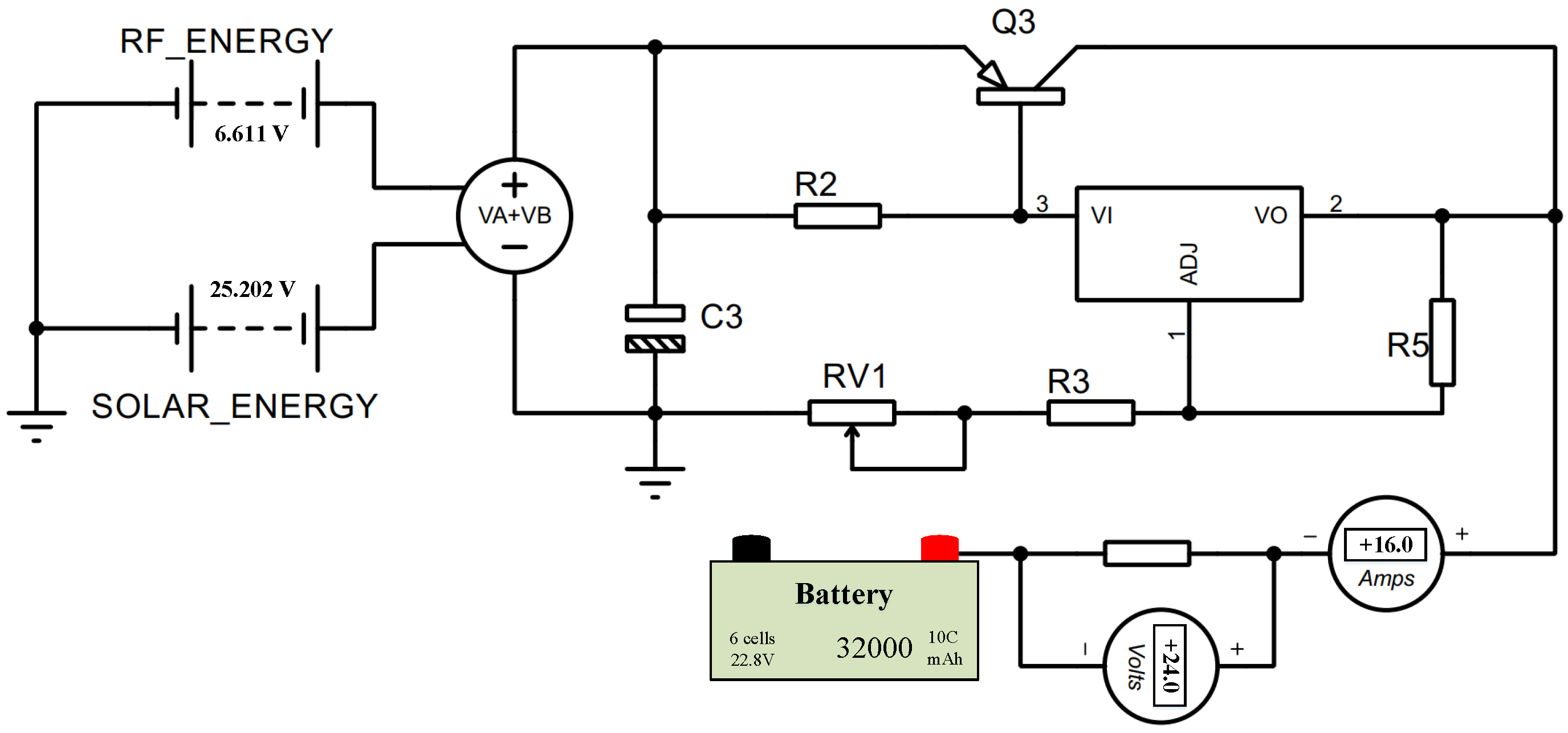
4. Charging System
5. Simulations and Results
5.1. Stand-Alone Harvesting Solar Energy
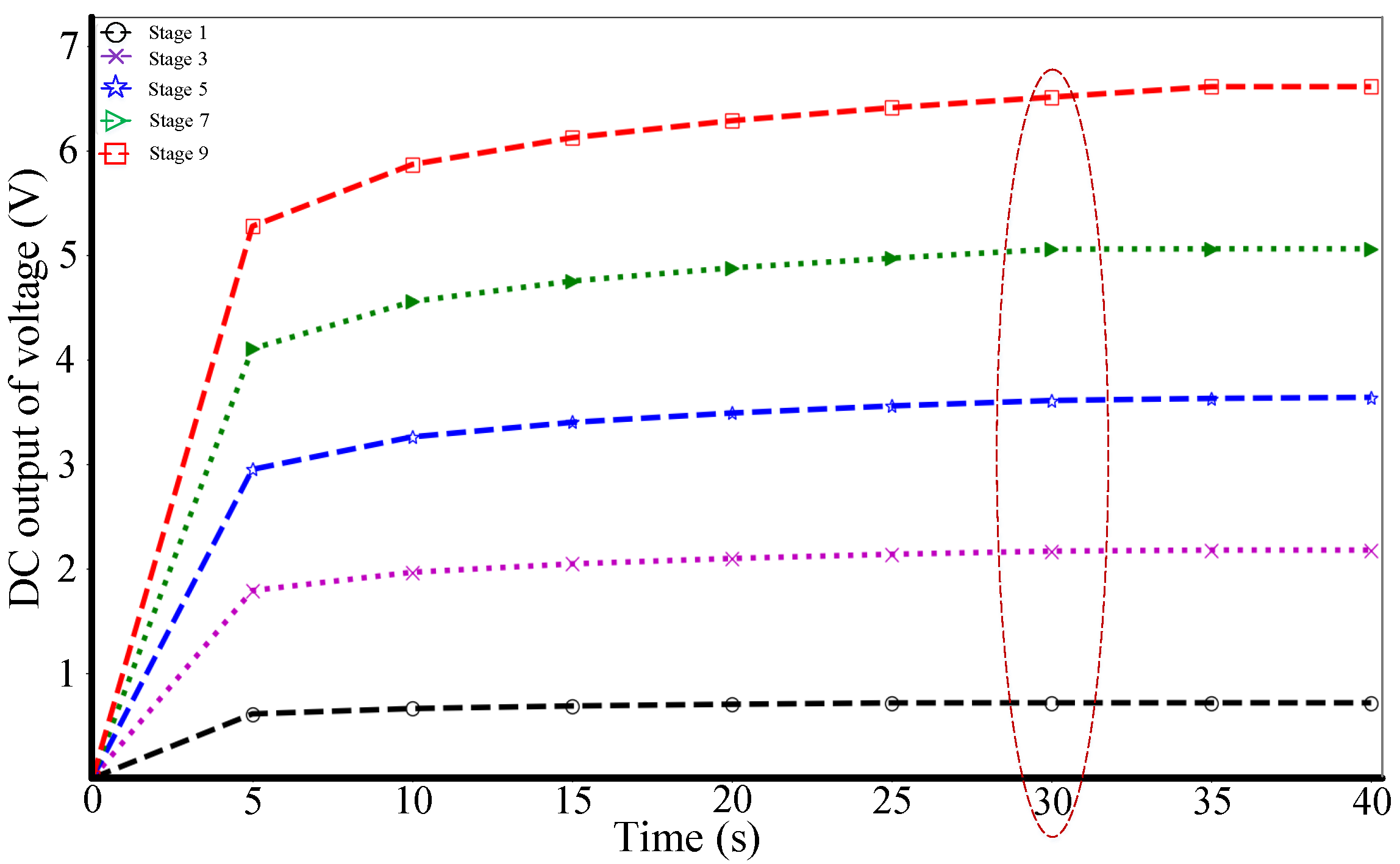
5.2. Stand-Alone Harvesting RF Energy
5.3. Hybrid Solar-RF Harvesting Energy
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Faria, B.M.; Reis, L.P.; Lau, N. A Survey on Intelligent Wheelchair Prototypes and Simulators. In New Perspectives in Information Systems and Technologies; Rocha, Á., Correia, A.M., Tan, F.B., Stroetmann, K.A., Eds.; Springer International Publishing: Cham, Switzerland, 2014; Volume 1, pp. 545–557. [Google Scholar]
- Leaman, J.; La, H.M. A Comprehensive Review of Smart Wheelchairs: Past, Present, and Future. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 486–499. [Google Scholar] [CrossRef]
- Mazumder, O.; Kundu, A.S.; Chattaraj, R.; Bhaumik, S. Holonomic wheelchair control using EMG signal and joystick interface. In Proceedings of the 2014 Recent Advances in Engineering and Computational Sciences (RAECS), Chandigarh, India, 6–8 March 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Pasteau, F.; Krupa, A.; Babel, M. Vision-based assistance for wheelchair navigation along corridors. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 4430–4435. [Google Scholar] [CrossRef]
- Desmond, R.; Dickerman, M.; Fleming, J.; Sinyukov, D.; Schaufeld, J.; Padir, T. Development of modular sensors for semi-autonomous wheelchairs. In Proceedings of the 2013 IEEE Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 22–23 April 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Sinyukov, D.; Desmond, R.; Dickerman, M.; Fleming, J.; Schaufeld, J.; Padir, T. Multi-modal control framework for a semi-autonomous wheelchair using modular sensor designs. Intell. Serv. Robot. 2014, 7, 145–155. [Google Scholar] [CrossRef]
- Rathore, D.K.; Srivastava, P.; Pandey, S.; Jaiswal, S. A novel multipurpose smart wheelchair. In Proceedings of the 2014 IEEE Students’ Conference on Electrical, Electronics and Computer Science, Bhopal, India, 1–2 March 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Wu, D.P. Electrical Wheelchair with Double Frame Structure. U.S. Patent 6,206,119, 27 March 2001. [Google Scholar]
- Ding, D.; Parmanto, B.; Karimi, H.A.; Roongpiboonsopit, D.; Pramana, G.; Conahan, T.; Kasemsuppakorn, P. Design Considerations for a Personalized Wheelchair Navigation System. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 23–26 August 2007; pp. 4790–4793. [Google Scholar] [CrossRef]
- Lankenau, A.; Rofer, T. A versatile and safe mobility assistant. IEEE Robot. Autom. Mag. 2001, 8, 29–37. [Google Scholar] [CrossRef]
- Urbano, M.; Deti, J.F.; Nunes, U.; Zeilinger, H. Extending a smart wheelchair navigation by stress sensors. In Proceedings of the ETFA2011, Toulouse, France, 5–9 September 2011; pp. 1–4. [Google Scholar] [CrossRef]
- Tyagi, V.; Gupta, N.K.; Tyagi, P.K. Smart wheelchair using fuzzy inference system. In Proceedings of the 2013 IEEE Global Humanitarian Technology Conference: South Asia Satellite (GHTC-SAS), Trivandrum, Kerala, India, 23–24 August 2013; pp. 175–180. [Google Scholar] [CrossRef]
- Morère, Y.; Abdelkader, M.H.; Cosnuau, K.; Guilmois, G.; Bourhis, G. Haptic control for powered wheelchair driving assistance. IRBM 2015, 36, 293–304. [Google Scholar] [CrossRef]
- Nguyen, J.S.; Su, S.W.; Nguyen, H.T. Experimental study on a smart wheelchair system using a combination of stereoscopic and spherical vision. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 4597–4600. [Google Scholar] [CrossRef]
- Levine, S.P.; Bell, D.A.; Jaros, L.A.; Simpson, R.C.; Koren, Y.; Borenstein, J. The NavChair Assistive Wheelchair Navigation System. IEEE Trans. Rehabil. Eng. 1999, 7, 443–451. [Google Scholar] [CrossRef] [PubMed]
- Ohno, K.; Tsubouchi, T.; Shigematsu, B.; Yuta, S. Differential GPS and odometry-based outdoor navigation of a mobile robot. Adv. Robot. 2004, 18, 611–635. [Google Scholar] [CrossRef]
- Karakkat Narayanan, V.; Pasteau, F.; Babel, M.; Chaumette, F. Visual servoing for autonomous doorway passing in a wheelchair using a single doorpost. In Proceedings of the IEEE/RSJ IROS Workshop on Assistance and Service Robotics in a Human Environment, ASROB, Chicago, IL, USA, 1–4 September 2014. [Google Scholar]
- Carlson, T.; del R. Millan, J. Brain-Controlled Wheelchairs: A Robotic Architecture. IEEE Robot. Autom. Mag. 2013, 20, 65–73. [Google Scholar] [CrossRef]
- Cooper, R.A.; Vansickle, D.P.; Albright, S.J.; Stewart, K.J.; Flannery, M.; Robertson, R.N. Power wheelchair range testing and energy consumption during fatigue testing. J. Rehabil. Res. Dev. 1995, 32, 255–263. [Google Scholar]
- Ramirez, D.Z.M.; Rasha, L.; Barbareschi, G.; Suzuki, T.; Caplan, I.; McKinnon, I.; Brett, D.J.; Holloway, C. Adjusted method to calculate an electric wheelchair power cycle: Fuel cell implementation example. J. Energy Storage 2019, 23, 371–380. [Google Scholar] [CrossRef]
- Takahashi, Y.; Matsuo, S.; Kawakami, K. Hybrid robotic wheelchair with photovoltanic solar cell and fuel cell. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008; pp. 1636–1640. [Google Scholar]
- Takahashi, Y.; Matsuo, S. Running experiments of electric wheelchair powered by natural energies. In Proceedings of the 2011 IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 945–950. [Google Scholar] [CrossRef]
- Le, A.; Truong, L.; Quyen, T.; Nguyen, C.; Nguyen, M. Wireless Power Transfer Near-field Technologies for Unmanned Aerial Vehicles (UAVs): A Review. EAI Endorsed Trans. Ind. Netw. Intell. Syst. 2020, 7, 1–18. [Google Scholar] [CrossRef]
- Junaid, A.B.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L. Autonomous wireless self-charging for multi-rotor unmanned aerial vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Van Nguyen, C.; Van Quyen, T.; Le, A.M.; Truong, L.H.; Nguyen, M.T. Advanced Hybrid Energy Harvesting Systems for Unmanned Aerial Vehicles (UAVs). Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 34–39. [Google Scholar] [CrossRef]
- Campi, T.; Cruciani, S.; Feliziani, M. Wireless power transfer technology applied to an autonomous electric UAV with a small secondary coil. Energies 2018, 11, 352. [Google Scholar] [CrossRef]
- Babaa, S.E.; El Murr, G.; Mohamed, F.; Pamuri, S. Overview of boost converters for photovoltaic systems. J. Power Energy Eng. 2018, 6, 16–31. [Google Scholar] [CrossRef]
- Hasaneen, B.; Mohammed, A.A.E. Design and simulation of DC/DC boost converter. In Proceedings of the 2008 12th International Middle-East Power System Conference, Aswan, Egypt, 12–15 March 2008; pp. 335–340. [Google Scholar]
- Nechibvute, A.; Chawanda, A.; Taruvinga, N.; Luhanga, P. Radio frequency energy harvesting sources. Acta Electrotech. Inform. 2017, 17, 19–27. [Google Scholar] [CrossRef]
- Curty, J.P.; Joehl, N.; Krummenacher, F.; Dehollain, C.; Declercq, M.J. A model for/spl mu/-power rectifier analysis and design. IEEE Trans. Circuits Syst. I Regul. Pap. 2005, 52, 2771–2779. [Google Scholar] [CrossRef]
- Abdollahi, A.; Han, X.; Avvari, G.; Raghunathan, N.; Balasingam, B.; Pattipati, K.; Bar-Shalom, Y. Optimal battery charging, Part I: Minimizing time-to-charge, energy loss, and temperature rise for OCV-resistance battery model. J. Power Sources 2016, 303, 388–398. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Solar Panel | Inductor | Mosfet | Capacitor | Resistor | Diode |
|---|---|---|---|---|---|---|
| Value | 121.7 × 53.3 × 0.2 cm − 1.8 kg | 3 mH | IRF540N | 100 F | 6.6 | 1N4007 |
| Parameter | RF Signal | Inductor | Capacitor | Diode | |
|---|---|---|---|---|---|
| Frequency | Amplitude | ||||
| Value | 900 MHz, 2.4 GHz, 5.8 GHz | 0.2 V | 1 mH | C = 0.22 F; C to C = 100 F | 10DQ015 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, C.V.; Nguyen, M.T.; Quyen, T.V.; Le, A.M.; Masaracchia, A.; Nguyen, H.T.; Nguyen, H.P.; Nguyen, L.D.; Nguyen, H.T.; Nguyen, V.Q. Hybrid Solar-RF Energy Harvesting Systems for Electric Operated Wheelchairs. Electronics 2020, 9, 752. https://doi.org/10.3390/electronics9050752
Nguyen CV, Nguyen MT, Quyen TV, Le AM, Masaracchia A, Nguyen HT, Nguyen HP, Nguyen LD, Nguyen HT, Nguyen VQ. Hybrid Solar-RF Energy Harvesting Systems for Electric Operated Wheelchairs. Electronics. 2020; 9(5):752. https://doi.org/10.3390/electronics9050752
Chicago/Turabian StyleNguyen, Cuong V., Minh T. Nguyen, Toan V. Quyen, Anh M. Le, Antonino Masaracchia, Ha T. Nguyen, Huy P. Nguyen, Long D. Nguyen, Hoa T. Nguyen, and Vinh Q. Nguyen. 2020. "Hybrid Solar-RF Energy Harvesting Systems for Electric Operated Wheelchairs" Electronics 9, no. 5: 752. https://doi.org/10.3390/electronics9050752
APA StyleNguyen, C. V., Nguyen, M. T., Quyen, T. V., Le, A. M., Masaracchia, A., Nguyen, H. T., Nguyen, H. P., Nguyen, L. D., Nguyen, H. T., & Nguyen, V. Q. (2020). Hybrid Solar-RF Energy Harvesting Systems for Electric Operated Wheelchairs. Electronics, 9(5), 752. https://doi.org/10.3390/electronics9050752