Ad-Hoc Shallow Neural Network to Learn Hyper Filtered PhotoPlethysmoGraphic (PPG) Signal for Efficient Car-Driver Drowsiness Monitoring



Abstract
:1. Introduction
2. Materials and Methods
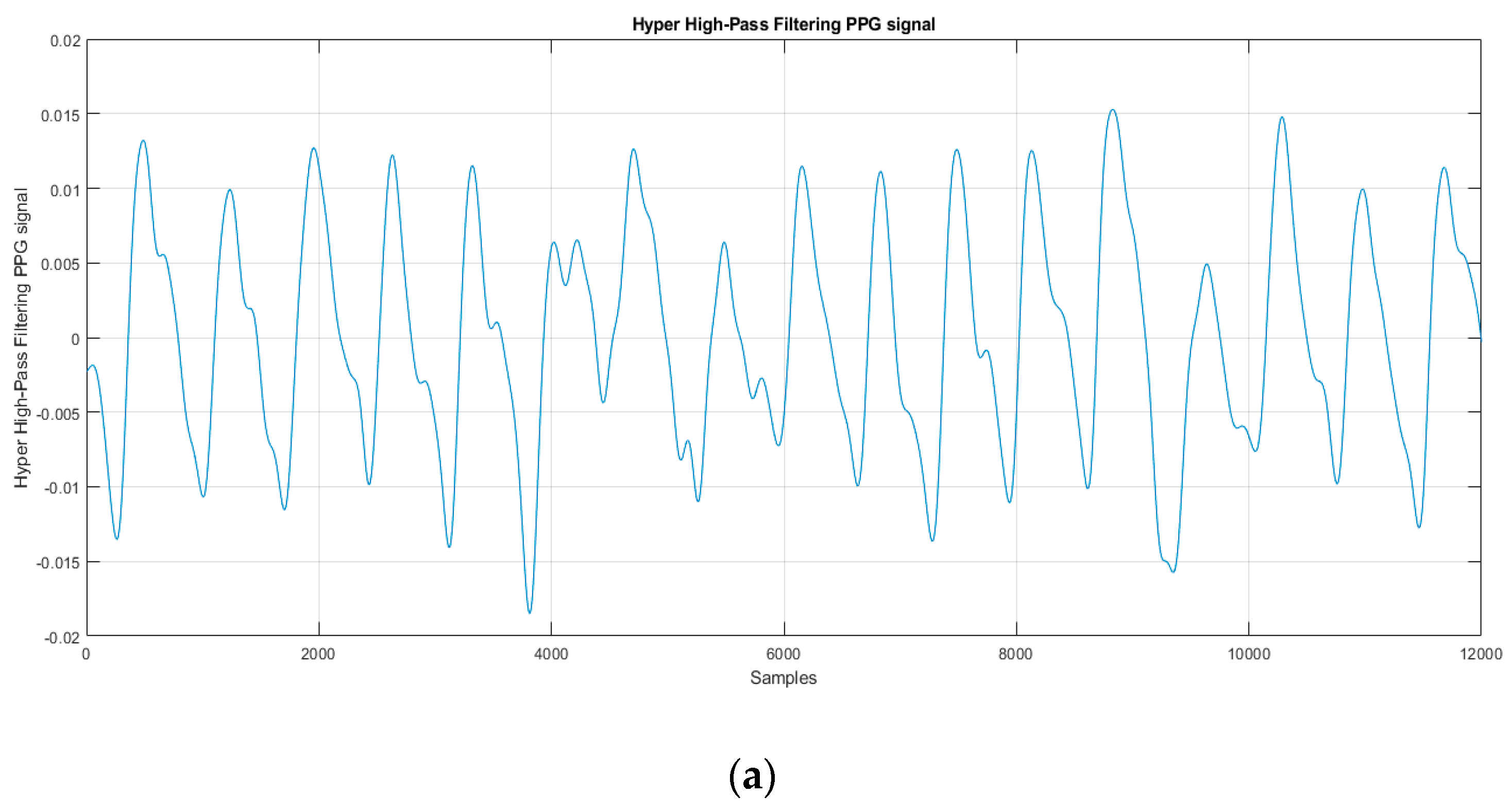
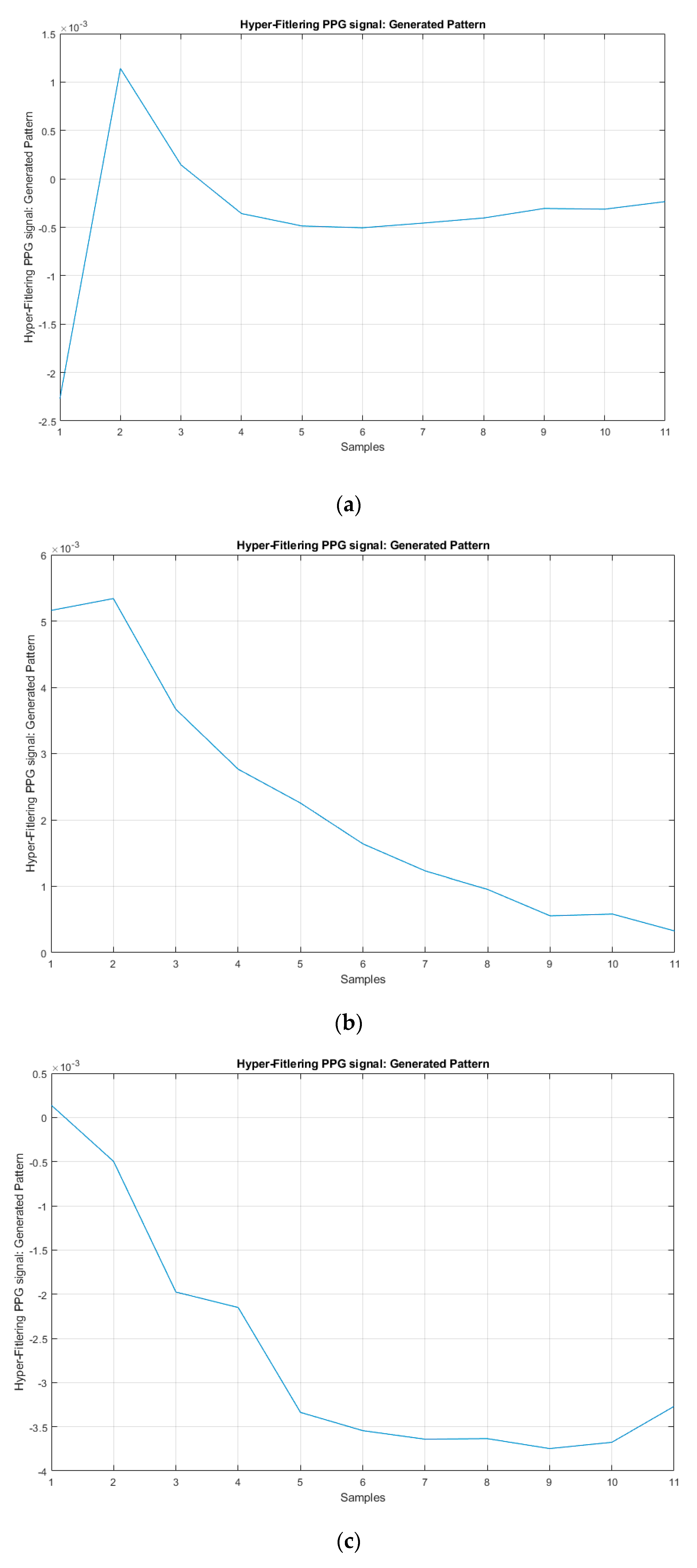
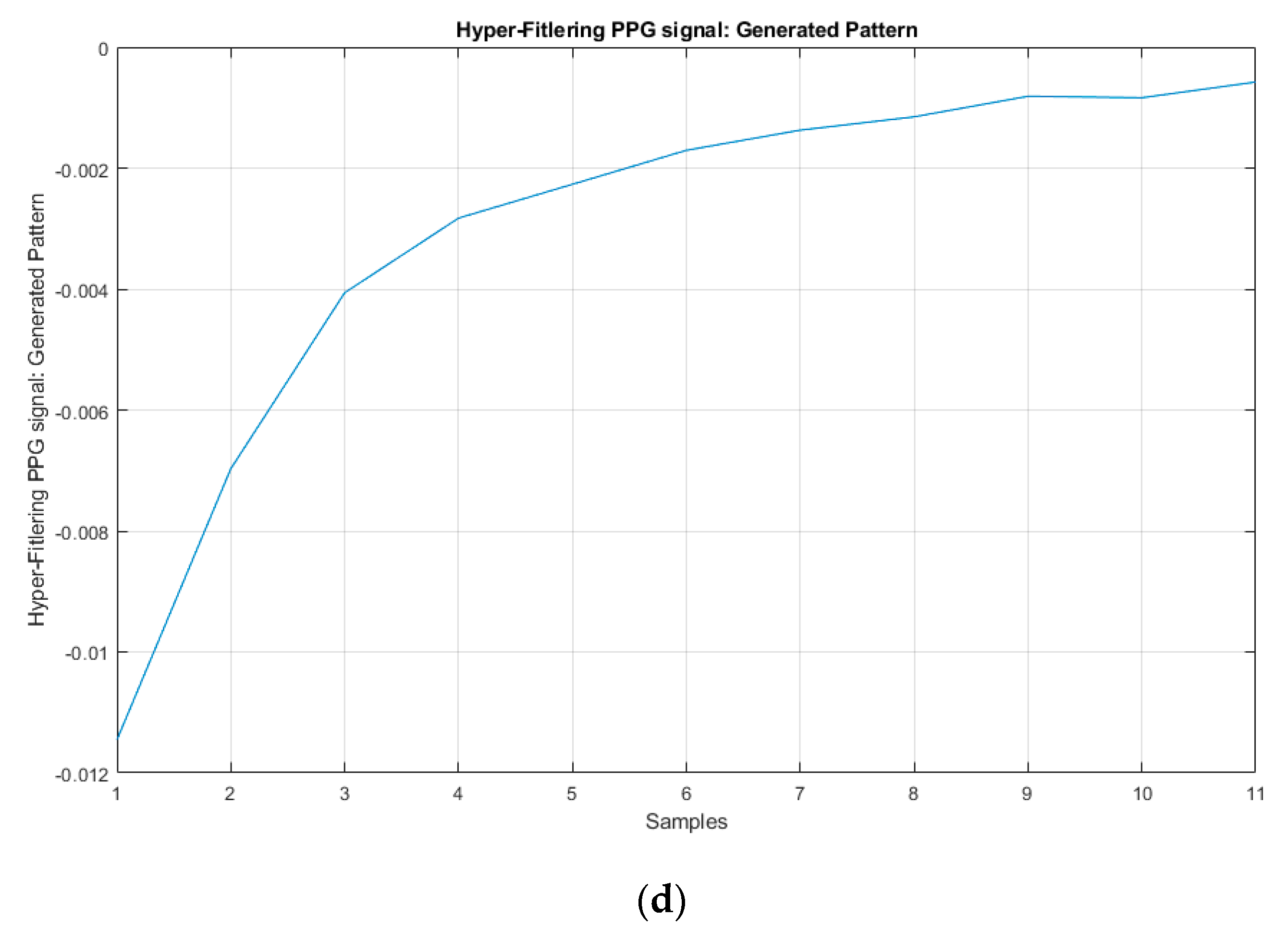
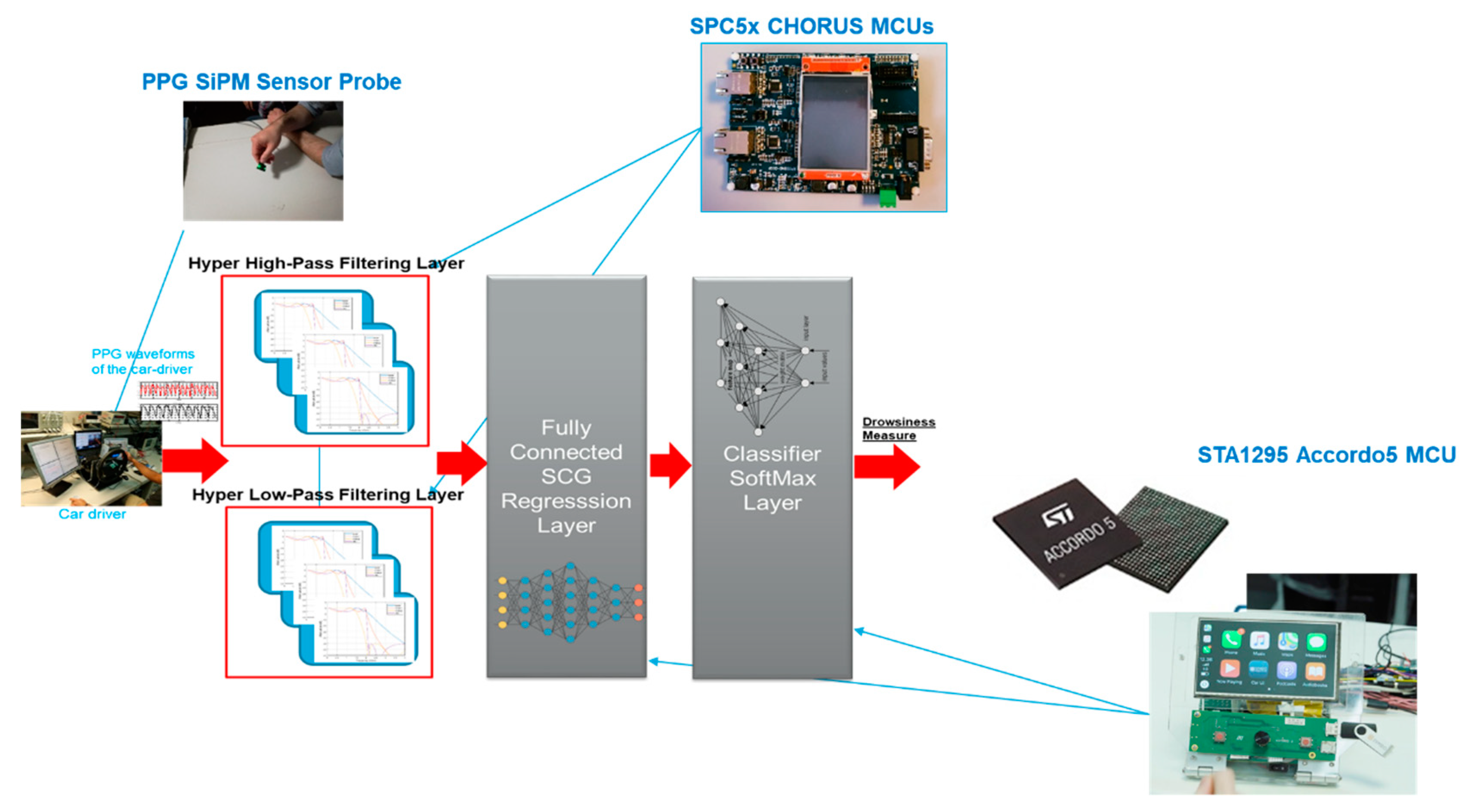
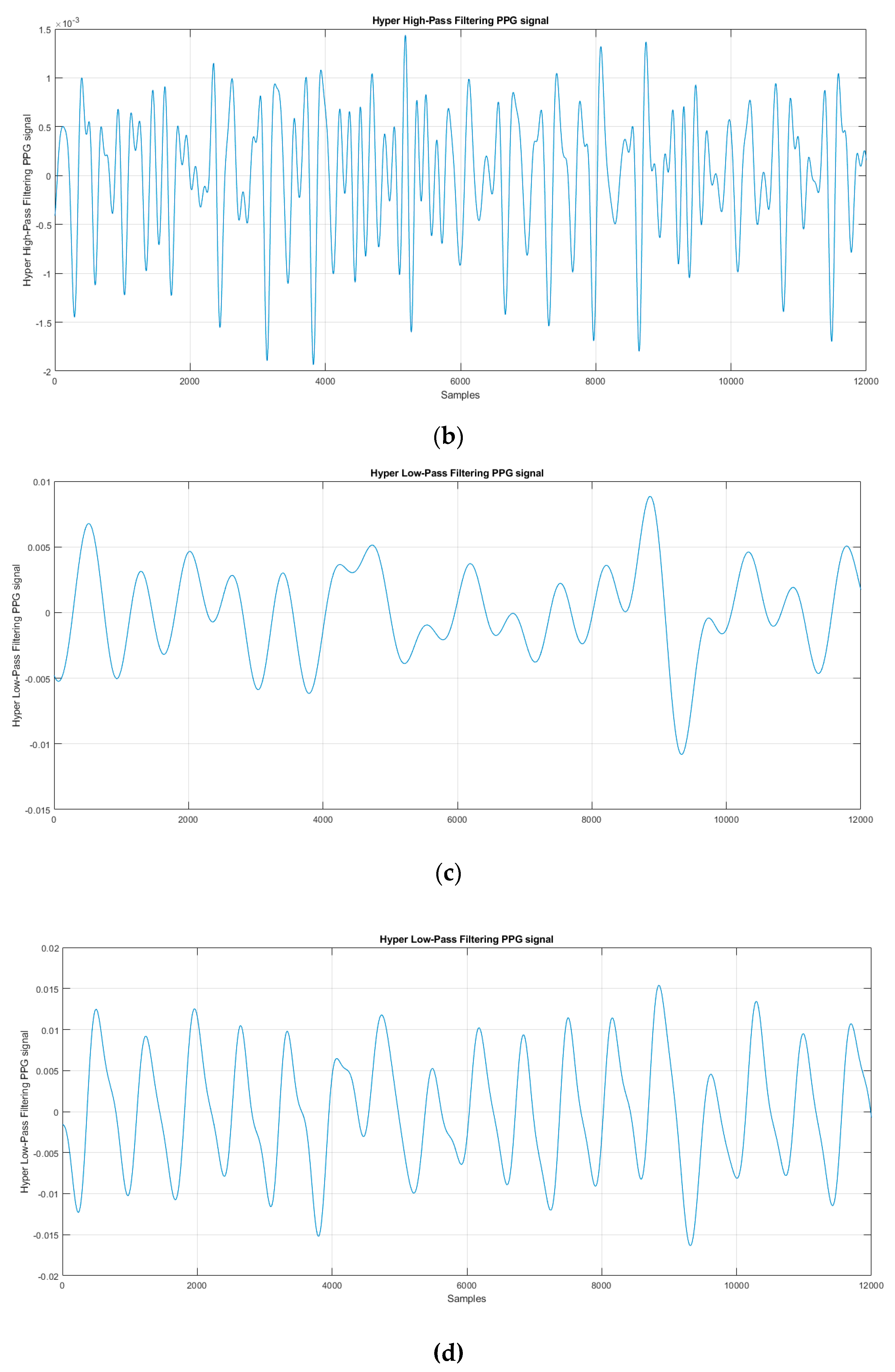
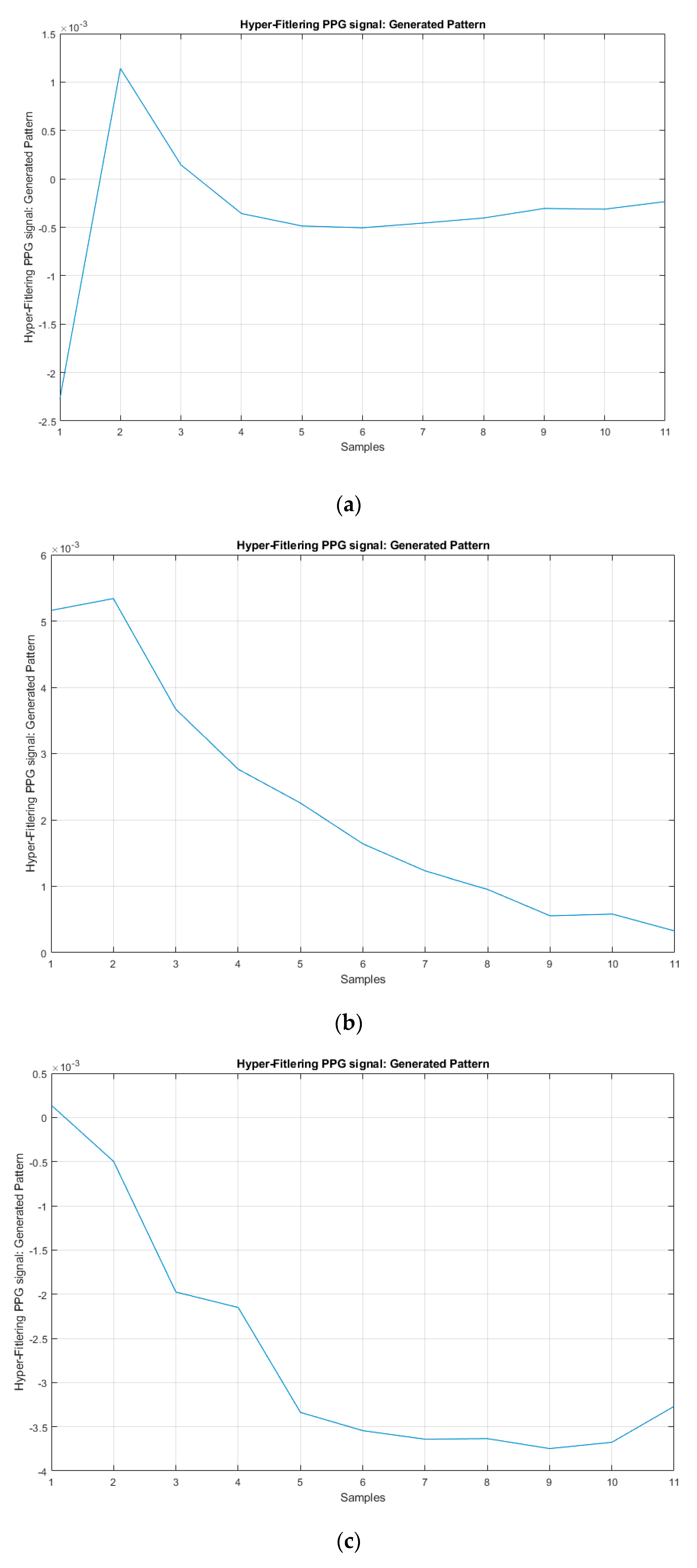
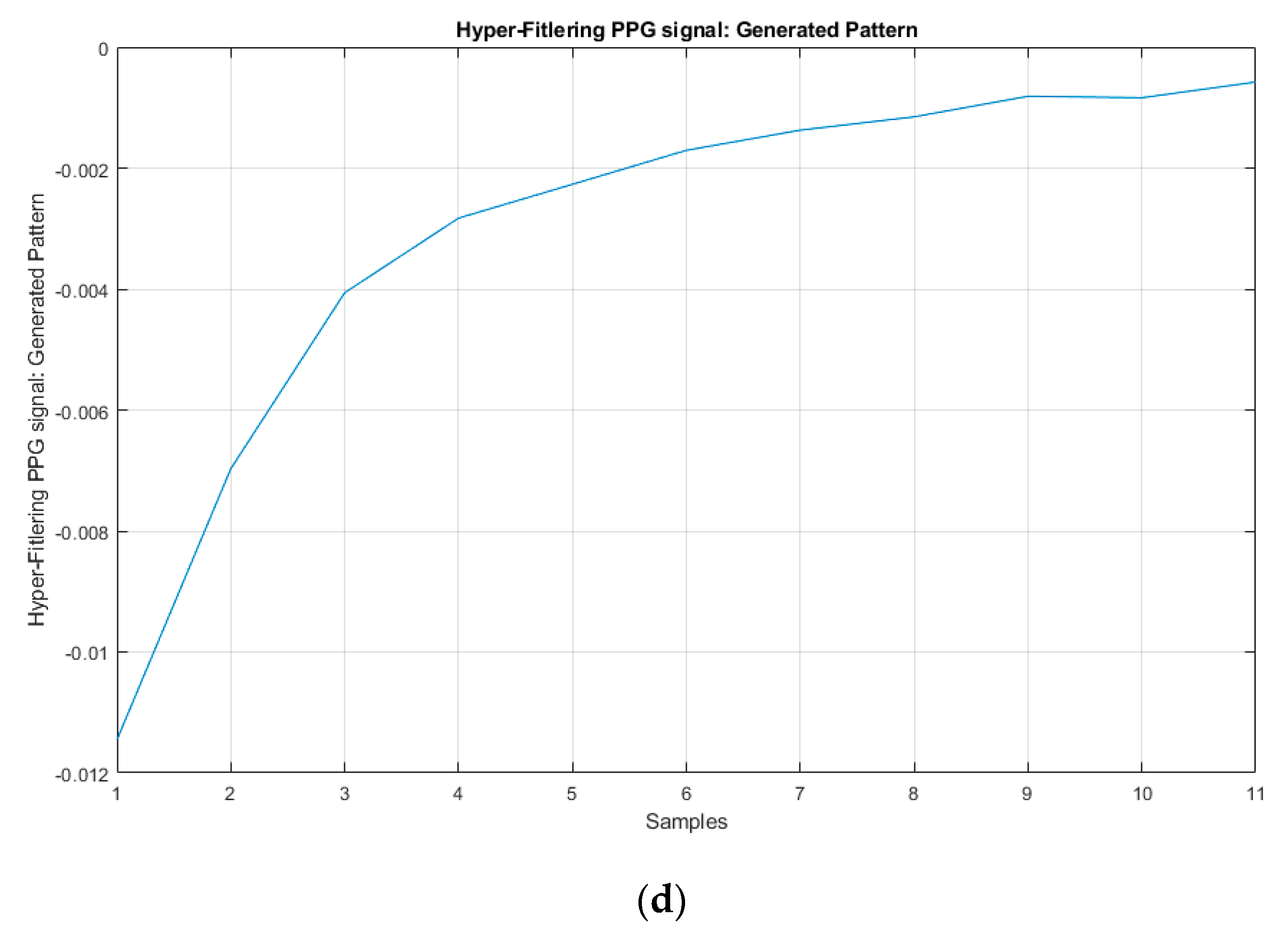
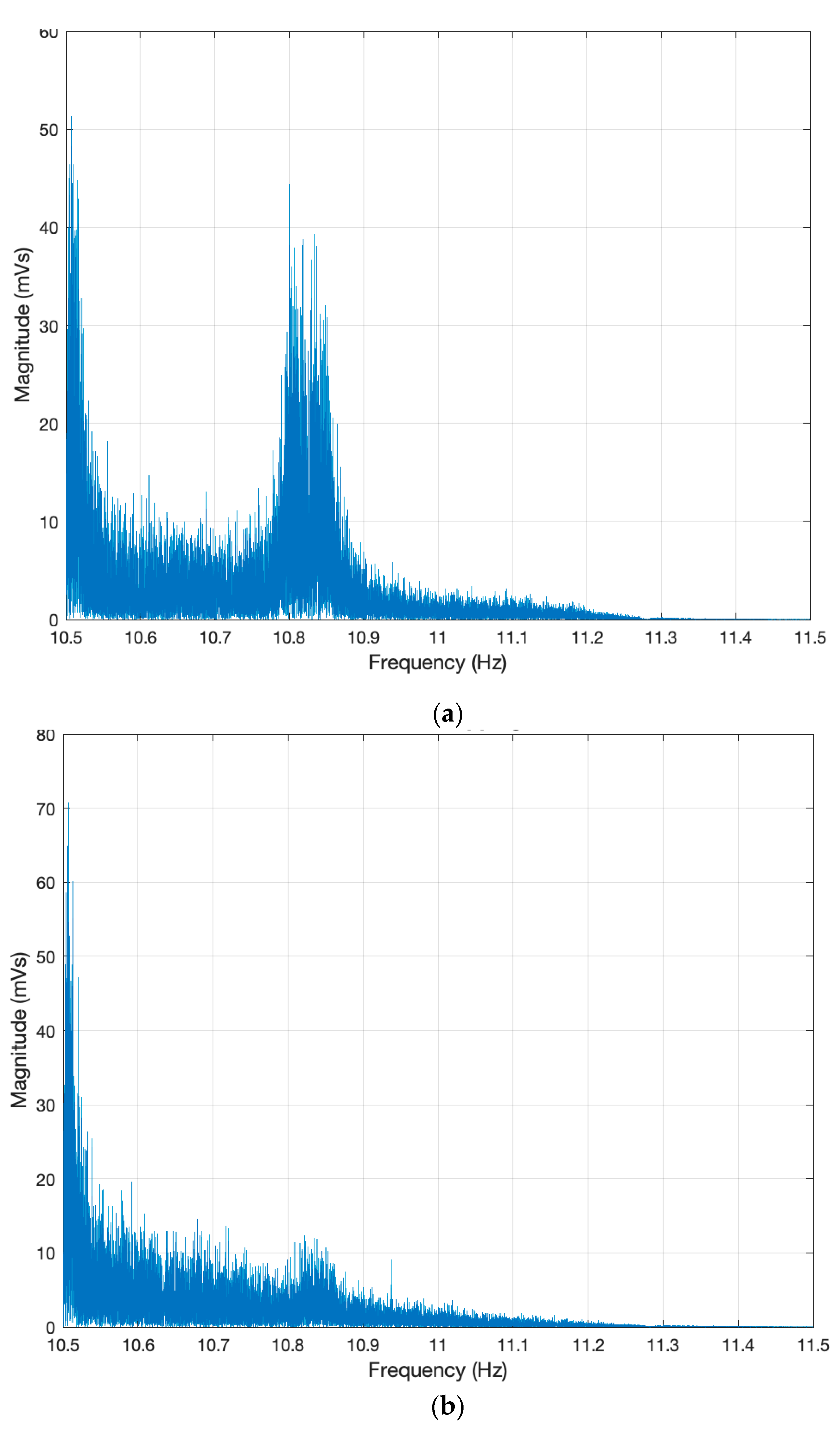
2.1. The Hyper Filtering Layers
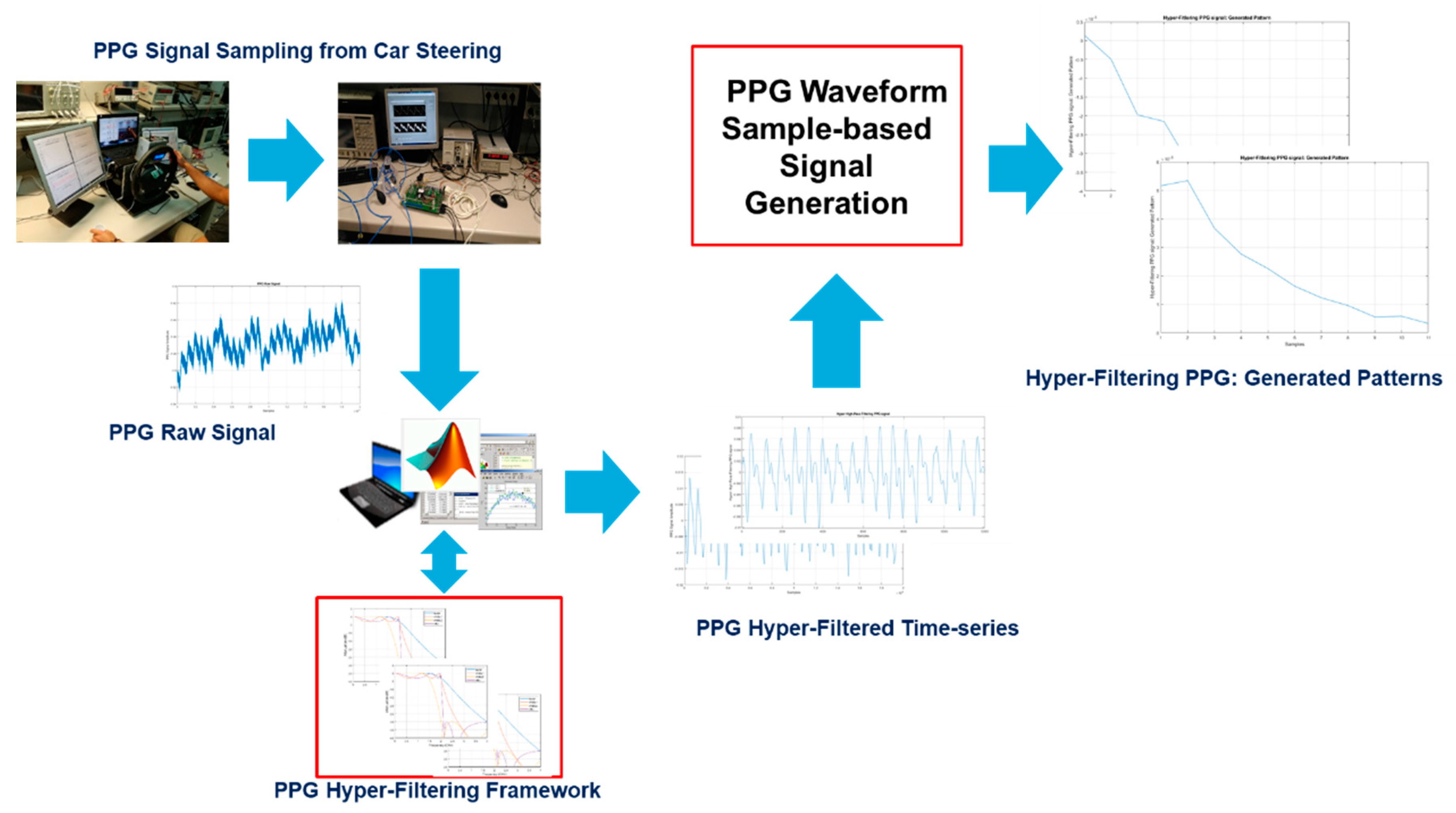
- We defined an action at as the sub-band frequency value between 0 Hz and cut-off frequency (frequency pass on Table 1) according to the type of filtering (low-pass or high-pass);
- We defined an Agent select the action at;
- We defined a next state St+1 as a set of pre-processed signals obtained collecting the value of each input PPG samples (in a windows of 5 sec sampling at 1 KHz as sampling frequency) of the filtered PPG raw signal at specific sub-band frequency of the action at;
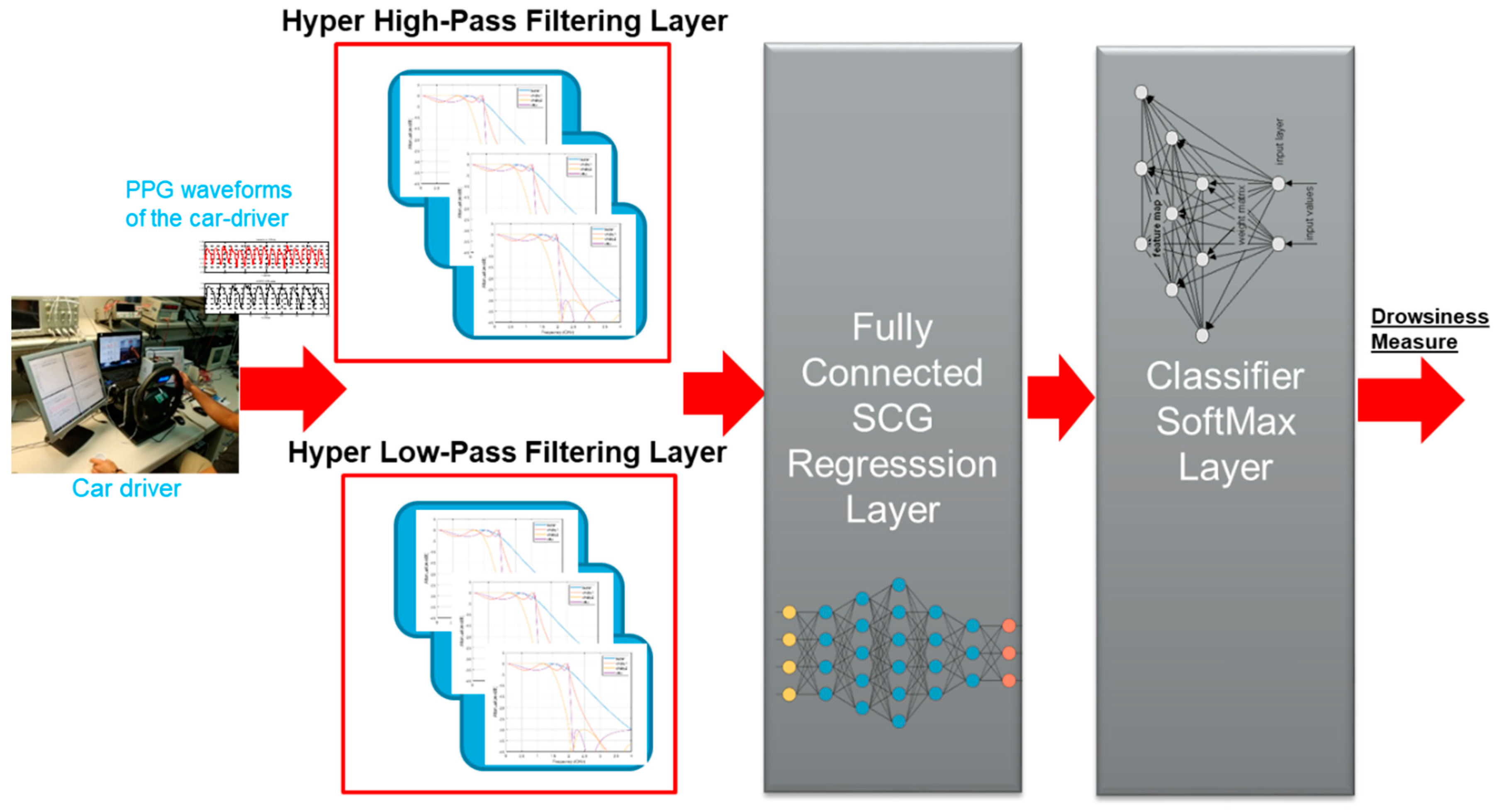
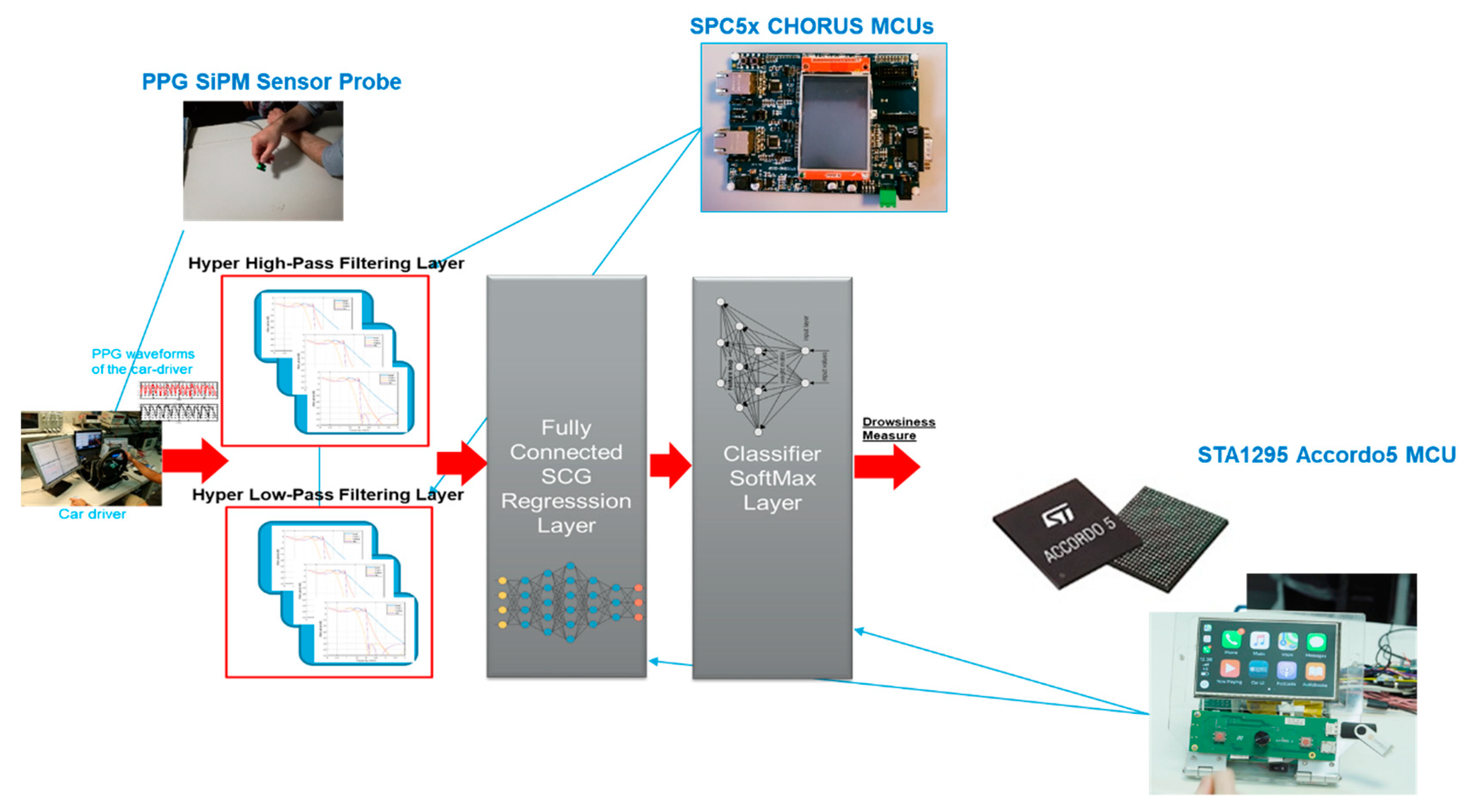
- We define an environment Reward as R(.|st,at), i.e., a measure of drowsiness of the car driver. We defined as R(.|st,at) the distance of the output of the machine learning system (regression layer plus SoftMax classification as per Figure 6) with respect to the actual level of attention of the car-driver (confirmed by the analysis of the simultaneously acquired EEG signal, as described in the next sections of the paper)
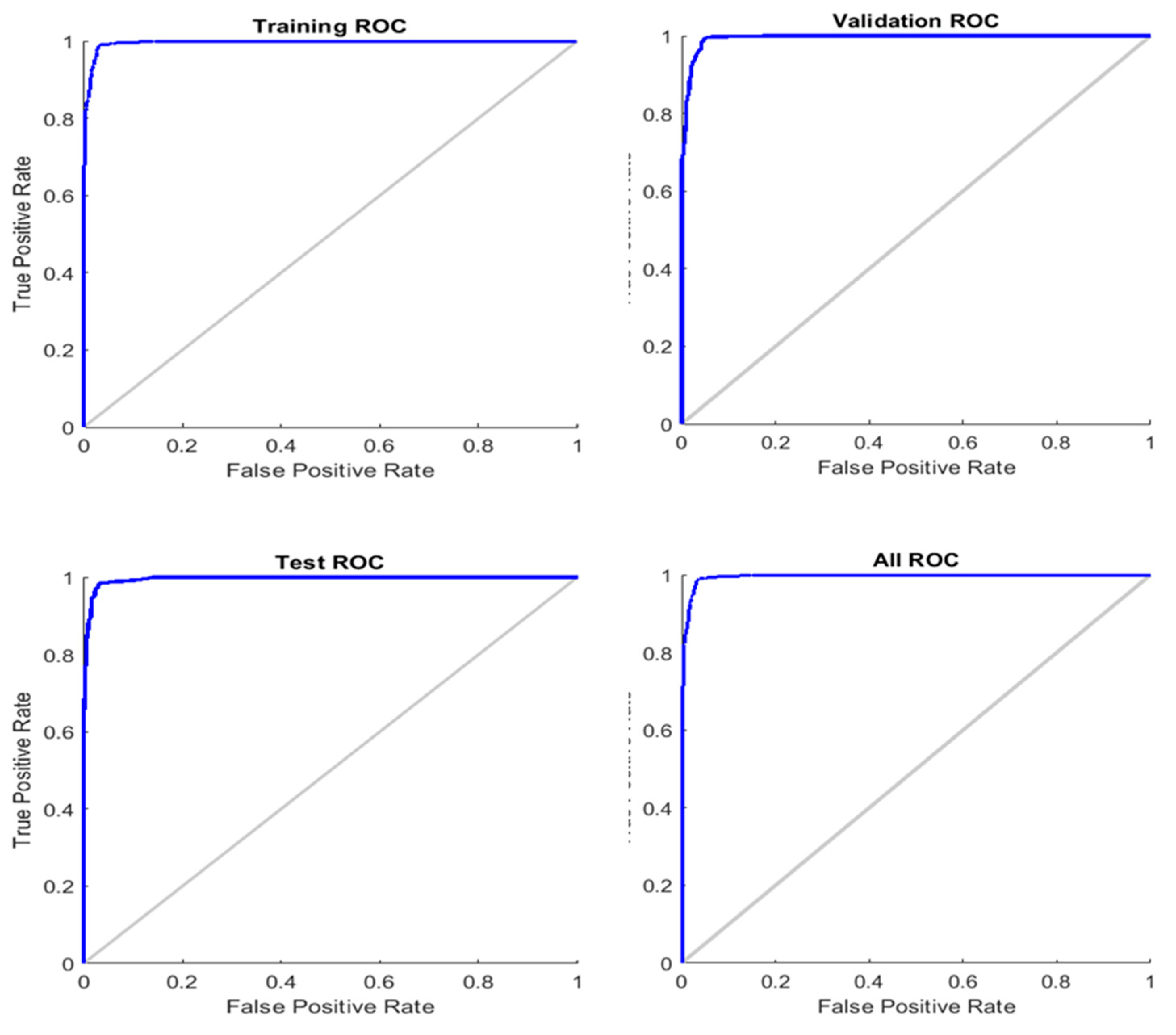
2.2. The Machine Learning Block
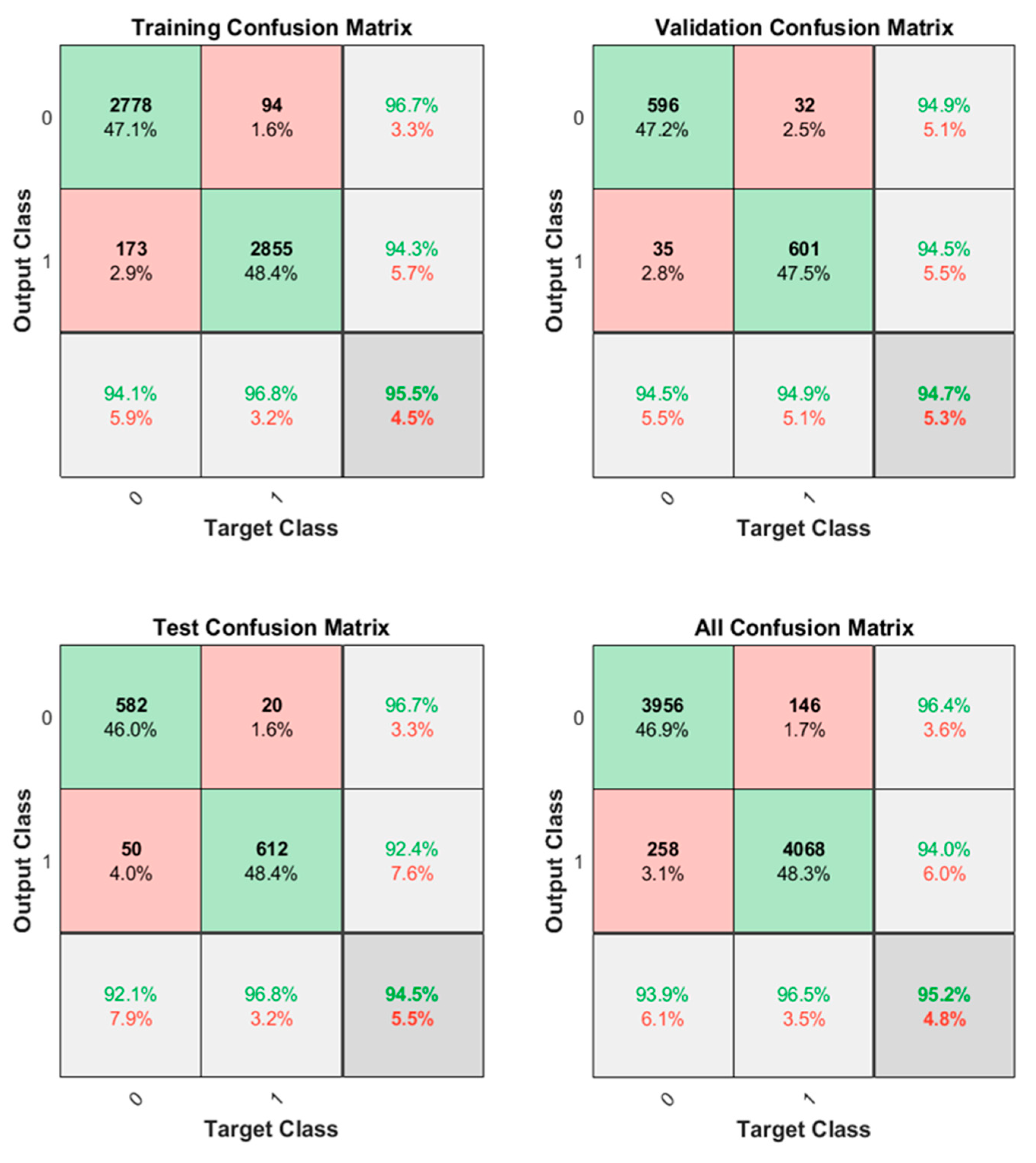
3. Results
4. Discussion and Conclusions
5. Patents
Author Contributions
Funding
Conflicts of Interest
References
- Igasaki, T.; Nagasawa, K.; Murayama, N.; Hu, Z. Drowsiness estimation under driving environment by heart rate variability and/or breathing rate variability with logistic regression analysis. In Proceedings of the IEEE International Conference on Biomedical Engineering and Informatics (BMEI), Shenyang, China, 14–16 October 2015. [Google Scholar]
- Vicente, J.; Laguna, P.; Bartra, A.; Bailón, R. Detection of driver’s drowsiness by means of HRV analysis. In Proceedings of the IEEE Computing in Cardiology, Hangzhou, China, 18–21 September 2011. [Google Scholar]
- Szypulska, M.; Piotrowski, Z. Prediction of fatigue and sleep onset using HRV analysis. In Proceedings of the IEEE the 19th International Conference Mixed Design of Integrated Circuits and Systems—MIXDES, Warsaw, Poland, 24–26 May 2012. [Google Scholar]
- Fujiwara, K.; Abe, E.; Kamata, K.; Nakayama, C.; Suzuki, Y.; Yamakawa, T.; Hiraoka, T.; Kano, M.; Sumi, Y.; Masuda, F.; et al. Heart rate variability-based driver drowsiness detection and its validation with EEG. IEEE Trans. Biomed. Eng. 2019, 66, 1769–1778. [Google Scholar] [CrossRef] [PubMed]
- Abi-Saleh, B.; Omar, B. Einthoven’s triangle transparency: A practical method to explain limb lead configuration following single lead misplacements. Rev. Cardiovasc. Med. 2010, 11, 33–38. [Google Scholar] [PubMed]
- Rundo, F.; Conoci, S.; Ortis, A.; Battiato, S. An Advanced Bio-Inspired PhotoPlethysmoGraphy (PPG) and ECG Pattern Recognition System for Medical Assessment. Sensors 2018, 18, 405. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.J.; Ding, F.; Wu, Z.; Wang, J.; Ma, Q.; Chon, K.; Clancy, E.; Qin, M.; Mendelson, Y.; Fu, N.; et al. Drowsiness control center by photoplythesmogram. In Proceedings of the IEEE 38th Annual Northeast Bioengineering Conference (NEBEC), Philadelphia, PA, USA, 16–18 March 2012. [Google Scholar]
- Kurian, D.; Radhakrishnan, K.; Balakrishnan, A.A. Drowsiness detection using photoplethysmography signal. In Proceedings of the IEEE Fourth International Conference on Advances in Computing and Communications, Kochi, India, 27–29 August 2014. [Google Scholar]
- Ryu, G.S.; You, J.; Kostianovskii, V.; Lee, E.B.; Kim, Y.; Park, C.; Noh, Y.Y. Flexible and printed PPG sensors for estimation of drowsiness. IEEE Trans. Electron Devices 2018, 65, 2997–3004. [Google Scholar] [CrossRef]
- Hong, T.; Qin, H. Drivers drowsiness detection in embedded system. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, 12–15 October 2007. [Google Scholar]
- Alshaqaqi, B.; Baquhaizel, A.S.; Ouis, M.E.A.; Boumehed, M.; Ouamri, A.; Keche, M. Driver drowsiness detection system. In Proceedings of the IEEE 8th International Workshop on Systems, Signal Processing and their Applications (WoSSPA), Algiers, Algeria, 12–15 May 2013. [Google Scholar]
- Sari, N.N.; Huang, Y.P. A two-stage intelligent model to extract features from PPG for drowsiness detection. In Proceedings of the IEEE International Conference on System Science and Engineering (ICSSE), Puli, Taiwan, 7–9 July 2016. [Google Scholar]
- Cheon, S.P.; Kang, S.J. Sensor-based driver condition recognition using support vector machine for the detection of driver drowsiness. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Redondo Beach, CA, USA, 11–14 June 2017. [Google Scholar]
- Choi, H.T.; Back, M.K.; Lee, K.C. Driver drowsiness detection based on multimodal using fusion of visual-feature and bio-signal. In Proceedings of the International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 17–19 October 2018. [Google Scholar]
- Vinciguerra, V.; Ambra, E.; Maddiona, L.; Romeo, M.; Mazzillo, M.; Rundo, F.; Fallica, G.; di Pompeo, F.; Chiarelli, A.M.; Zappasodi, F.; et al. PPG/ECG multisite combo system based on SiPM technology. Lect. Notes Electr. Eng. 2019, 539, 105–109. [Google Scholar]
- Mazzillo, M.; Maddiona, L.; Rundo, F.; Sciuto, A.; Libertino, S.; Lombardo, S.; Fallica, G. Characterization of sipms with nir long-pass interferential and plastic filters. IEEE Photonics J. 2018, 10, 1–12. [Google Scholar] [CrossRef]
- Conoci, S.; Rundo, F.; Fallica, G.; Lena, D.; Buraioli, I.; Demarchi, D. Live Demonstration of portable systems based on silicon sensors for the monitoring of physiological parameters of driver drowsiness and pulse wave velocity. In Proceedings of the IEEE Biomedical Circuits and Systems Conference (BioCAS), Cleveland, OH, USA, 17–19 October 2018. [Google Scholar]
- Chang, C.I. Hyperspectral Imaging: Techniques for Spectral Detection and Classification; Springer Science & Business Media: Berlin, Germany, 2003; ISBN 978-0-306-47483-5. [Google Scholar]
- Bianchi, G.; Sorrentino, R. Electronic Filter Simulation & Design; McGraw-Hill Professional: New York, NY, USA, 2007; ISBN 978-0-07-149467-0. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Moller, M.F. A Scaled Conjugate Gradient Algorithm for Fast Supervised Learning. Neural Netw. 1993, 6, 525–533. [Google Scholar] [CrossRef]
- Rundo, F.; Trenta, F.; di Stallo, A.L.; Battiato, S. Grid Trading System Robot (GTSbot): A Novel Mathematical Algorithm for Trading FX Market. Appl. Sci. 2019, 9, 1796. [Google Scholar] [CrossRef]
- Rundo, F.; Conoci, S.; Banna, G.L.; Ortis, A.; Stanco, S.; Battiato, S. Evaluation of Levenberg–Marquardt neural networks and stacked autoencoders clustering for skin lesion analysis, screening and follow-up. IET Comput. Vis. 2018, 12, 957–962. [Google Scholar] [CrossRef]
- Rundo, F.; Rinella, S.; Massimino, S.; Coco, M.; Fallica, G.; Parenti, R.; Conoci, S.; Perciavalle, V. An Innovative Deep Learning Algorithm for Drowsiness Detection from EEG Signal. Computation 2019, 7, 13. [Google Scholar] [CrossRef]
- STMicroelectronics ACCORDO 5 Automotive Microcontroller. Available online: https://www.st.com/en/automotive-infotainment-and-telematics/automotive-infotainment-socs.html?icmp=tt4379_gl_pron_nov2016 (accessed on 2 July 2019).
- STMicroelectronics SPC5 MCUs. Available online: https://www.st.com/en/automotive-infotainment-and-telematics/automotive-infotainment-socs.html?icmp=tt4379_gl_pron_nov2016 (accessed on 2 July 2019).
- Rundo, F.; Petralia, S.; Fallica, G.; Conoci, S. A nonlinear pattern recognition pipeline for PPG/ECG medical assessments. Lect. Notes Electr. Eng. 2019, 539, 473–480. [Google Scholar]
- Banna, G.L.; Camerini, A.; Bronte, G.; Anile, G.; Addeo, A.; Rundo, F.; Zanghi, G.; Lal, R.; Libra, M. Oral metronomic vinorelbine in advanced non-small cell lung cancer patients unfit for chemotherapy. Anticancer Res. 2018, 38, 3689–3697. [Google Scholar] [CrossRef] [PubMed]
- Conoci, S.; Rundo, F.; Petralta, S.; Battiato, S. Advanced skin lesion discrimination pipeline for early melanoma cancer diagnosis towards PoC devices. In Proceedings of the IEEE European Conference on Circuit Theory and Design (ECCTD), Catania, Italy, 4–6 September 2017. [Google Scholar]
- Ortis, A.; Rundo, F.; Di Giore, G.; Battiato, S. Adaptive Compression of Stereoscopic Images, ICIAP 2013, Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8156. [Google Scholar] [CrossRef]
- ECG-1L. Available online: https://www.knowledge-share.eu/en/patent/ecg-watch-elettrocardiografo-da-polso/ (accessed on 25 July 2019).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Frequency Pass (Hz) | Frequency Stop (Hz) | Passband Attenuation (dB) | Stopband Attenuation (dB) |
|---|---|---|---|---|
| Low-pass | 3.8 | 7.21 | 0.001 | 100 |
| High-pass | 1 | 0.3 | 0.01 | 40 |
| Filter | Fc-pass-1 | Fc-pass-2 | Fc-pass-3 | Fc-pass-4 | Fc-pass-5 | Fc-pass-6 | Fc-pass-7 | Fc-pass-8 | Fc-pass-9 | Fc-pass-10 | Fc-pass-11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| High-pass | 0.5 | / | / | / | / | / | / | / | / | / | / |
| Low-pass | 1.00 | 1.34 | 2.09 | 2.321 | 3.09 | 3.44 | 4.2 | 4.23 | 5.2 | 5.52 | 6.87 |
| Filter | Fc-pass-1 | Fc-pass-2 | Fc-pass-3 | Fc-pass-4 | Fc-pass-5 | Fc-pass-6 | Fc-pass-7 | Fc-pass-8 | Fc-pass-9 | Fc-pass-10 | Fc-pass-11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| High-pass | 0.50 | 1.5 | 2.2 | 2.75 | 3.12 | 3.65 | 4.1 | 4.487 | 5.23 | 5.3 | 6.11 |
| Low-pass | 7 | / | / | / | / | / | / | / | / | / | / |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rundo, F.; Spampinato, C.; Conoci, S. Ad-Hoc Shallow Neural Network to Learn Hyper Filtered PhotoPlethysmoGraphic (PPG) Signal for Efficient Car-Driver Drowsiness Monitoring. Electronics 2019, 8, 890. https://doi.org/10.3390/electronics8080890
Rundo F, Spampinato C, Conoci S. Ad-Hoc Shallow Neural Network to Learn Hyper Filtered PhotoPlethysmoGraphic (PPG) Signal for Efficient Car-Driver Drowsiness Monitoring. Electronics. 2019; 8(8):890. https://doi.org/10.3390/electronics8080890
Chicago/Turabian StyleRundo, Francesco, Concetto Spampinato, and Sabrina Conoci. 2019. "Ad-Hoc Shallow Neural Network to Learn Hyper Filtered PhotoPlethysmoGraphic (PPG) Signal for Efficient Car-Driver Drowsiness Monitoring" Electronics 8, no. 8: 890. https://doi.org/10.3390/electronics8080890
APA StyleRundo, F., Spampinato, C., & Conoci, S. (2019). Ad-Hoc Shallow Neural Network to Learn Hyper Filtered PhotoPlethysmoGraphic (PPG) Signal for Efficient Car-Driver Drowsiness Monitoring. Electronics, 8(8), 890. https://doi.org/10.3390/electronics8080890