A Novel Compact dq-Reference Frame Model for Inverter-Based Microgrids

 ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
- Using a Kron reduced network, the interaction between IDGs and the line parameters have been included.
- The line characteristics have been adjusted with a dominant virtual impedance, which improves the accuracy of the model and the stability performance.
- With some practical design assumptions about the local controller tuning process, the inner controller dynamics have been neglected.
- The resulting model offers a compact form with low complexity and high accuracy, which is shown in an experimental validation.
- The implemented dq-reference frame-based primary controller leads to accurate proportional power sharing in steady-state.
1.1. Related Work
1.2. Notation
1.3. Organization of the Paper
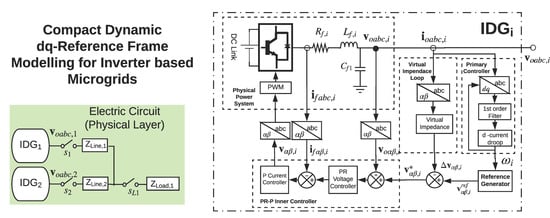
2. System Overview
2.1. Inner Controller
2.2. Virtual Impedance Loop
2.3. Power Controller
3. Compact dq-Reference Frame Model for Inverter Based Microgrids
3.1. IDG Model
3.2. Load Modeling
3.3. Network Model
3.4. Compact dq-Reference Frame Model
4. Study Cases and Model Validation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| IMG | Inverter based Microgrid |
| IDG | Inverter based Distributed Generator |
| MGCC | Microgrid Central Controller |
| BESS | Battery Energy Storage System |
| RES | Renewable Energy Source |
| PV | Photovoltaic System |
| PWM | Pulsewidth Modulation |
| PR | Proportional Resonant |
| VCS | Voltage Controlled Source |
| CPS | Cyber Physical System |
References
- Jäger-Waldau, A. Snapshot of Photovoltaics—March 2017. Sustainability 2017, 9, 783. [Google Scholar] [CrossRef]
- Global Wind Statistics; Global Wind Energy Council: Washington, DC, USA, 2017.
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage Stability and Reactive Power Sharing in Inverter-Based Microgrids With Consensus-Based Distributed Voltage Control. IEEE Trans. Control Syst. Technol. 2015, 96–109. [Google Scholar] [CrossRef]
- Pepermans, G.; Driesen, J.; Haeseldonckx, D.; Belmans, R.; D’haeseleer, W. Distributed generation: Definition, benefits and issues. Energy Policy 2005, 33, 787–798. [Google Scholar] [CrossRef]
- Lasseter, R.H. Smart Distribution: Coupled Microgrids. Proc. IEEE 2011, 99, 1074–1082. [Google Scholar] [CrossRef]
- Andishgar, M.H.; Gholipour, E.; Hooshmand, R.A. An overview of control approaches of inverter-based microgrids in islanding mode of operation. Renew. Sustain. Energy Rev. 2017, 80, 1043–1060. [Google Scholar] [CrossRef]
- Olivares, D.E.; Cañizares, C.A.; Kazerani, M. A Centralized Energy Management System for Isolated Microgrids. IEEE Trans. Smart Grid 2014, 5, 1864–1875. [Google Scholar] [CrossRef]
- Bevrani, H.; Watanabe, M.; Mitani, Y. Microgrid Control: Concepts and Classification. In Power System Monitoring and Control; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2014; pp. 186–208. [Google Scholar] [CrossRef]
- Coelho, E.; Cortizo, P.; Garcia, P. Small signal stability for single phase inverter connected to stiff AC system. In Proceedings of the Conference Record of the 1999 IEEE Industry Applications Conference, Thirty-Forth IAS Annual Meeting (Cat. No.99CH36370), Phoenix, AZ, USA, 3–7 October 1999; Volume 4, pp. 2180–2187. [Google Scholar] [CrossRef]
- Guan, Y.; Vasquez, J.C.; Guerrero, J.M.; Coelho, E.A.A. Small-signal modeling, analysis and testing of parallel three-phase-inverters with a novel autonomous current sharing controller. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 571–578. [Google Scholar] [CrossRef]
- Hossain, M.J.; Pota, H.R.; Mahmud, M.A.; Aldeen, M. Robust Control for Power Sharing in Microgrids With Low-Inertia Wind and PV Generators. IEEE Trans. Sustain. Energy 2015, 6, 1067–1077. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, Analysis and Testing of Autonomous Operation of an Inverter-Based Microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. An Accurate Small-Signal Model of Inverter- Dominated Islanded Microgrids Using dq Reference Frame. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1070–1080. [Google Scholar] [CrossRef]
- Coelho, E.A.A.; Cortizo, P.C.; Garcia, P.F.D. Small-signal stability for parallel-connected inverters in stand-alone AC supply systems. IEEE Trans. Ind. Appl. 2002, 38, 533–542. [Google Scholar] [CrossRef]
- Luo, L.; Dhople, S.V. Spatiotemporal Model Reduction of Inverter-Based Islanded Microgrids. IEEE Trans. Energy Convers. 2014, 29, 823–832. [Google Scholar] [CrossRef]
- Rasheduzzaman, M.; Mueller, J.A.; Kimball, J.W. Reduced-Order Small-Signal Model of Microgrid Systems. IEEE Trans. Sustain. Energy 2015, 6, 1292–1305. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W.; Dorfler, F.; Bullo, F. Synchronization and power sharing for droop-controlled inverters in islanded microgrids. Automatica 2013, 49, 2603–2611. [Google Scholar] [CrossRef]
- Pota, H.R. Droop control for islanded microgrids. In Proceedings of the 2013 IEEE Power and Energy Society General Meeting (PES), Vancouver, BC, Canada, 21–25 July 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Leitner, S.; Yazdanian, M.; Mehrizi-Sani, A.; Muetze, A. Small-Signal Stability Analysis of an Inverter-Based Microgrid with Internal Model Based Controllers. IEEE Trans. Smart Grid 2017. [Google Scholar] [CrossRef]
- Guo, X.; Lu, Z.; Wang, B.; Sun, X.; Wang, L.; Guerrero, J.M. Dynamic Phasors-Based Modeling and Stability Analysis of Droop-Controlled Inverters for Microgrid Applications. IEEE Trans. Smart Grid 2014, 5, 2980–2987. [Google Scholar] [CrossRef]
- Toub, M.; Bijaieh, M.M.; Weaver, W.W.; Rush, D.R., III; Maaroufi, M.; Aniba, G. Droop Control in DQ Coordinates for Fixed Frequency Inverter-Based AC Microgrids. Electronics 2019, 8, 1168. [Google Scholar] [CrossRef]
- Zhang, B.; Yan, X.; Li, D.; Zhang, X.; Han, J.; Xiao, X. Stable operation and small-signal analysis of multiple parallel DG inverters based on a virtual synchronous generator scheme. Energies 2018, 11, 203. [Google Scholar] [CrossRef]
- Vasquez, J.C.; Guerrero, J.M.; Savaghebi, M.; Eloy-Garcia, J.; Teodorescu, R. Modeling, Analysis, and Design of Stationary-Reference-Frame Droop-Controlled Parallel Three-Phase Voltage Source Inverters. IEEE Trans. Ind. Electron. 2013, 60, 1271–1280. [Google Scholar] [CrossRef]
- Guan, Y.; Guerrero, J.M.; Zhao, X.; Vasquez, J.C.; Guo, X. A New Way of Controlling Parallel-Connected Inverters by Using Synchronous-Reference-Frame Virtual Impedance Loop-Part I: Control Principle. IEEE Trans. Power Electron. 2016, 31, 4576–4593. [Google Scholar] [CrossRef]
- Macana, C.A.; Pota, H.R. Adaptive synchronous reference frame virtual impedance controller for accurate power sharing in islanded ac-microgrids: A faster alternative to the conventional droop control. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 3728–3735. [Google Scholar] [CrossRef]
- Kabalan, M.; Singh, P.; Niebur, D. Large Signal Lyapunov-Based Stability Studies in Microgrids: A Review. IEEE Trans. Smart Grid 2017, 8, 2287–2295. [Google Scholar] [CrossRef]
- Czarnecki, L. Instantaneous Reactive Power p-q Theory and Power Properties of Three-Phase Systems. IEEE Trans. Power Deliv. 2006, 21, 362–367. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.W. Power Management of Inverter Interfaced Autonomous Microgrid Based on Virtual Frequency-Voltage Frame. IEEE Trans. Smart Grid 2011, 2, 30–40. [Google Scholar] [CrossRef]
- IEEE. IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE Std 1547-2003; IEEE: New York, NY, USA, 2003; pp. 1–28. [Google Scholar]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.L.; Loh, P.C. Advanced Control Architectures for Intelligent Microgrids. Part I: Decentralized and Hierarchical Control. IEEE Trans. Ind. Electron. 2013, 60, 1254–1262. [Google Scholar] [CrossRef]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. A Voltage and Frequency Droop Control Method for Parallel Inverters. IEEE Trans. Power Electron. 2007, 22, 1107–1115. [Google Scholar] [CrossRef]
- Schiffer, J.; Ortega, R.; Astolfi, A.; Raisch, J.; Sezi, T. Conditions for stability of droop-controlled inverter-based microgrids. Automatica 2014, 50, 2457–2469. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W.; Dörfler, F.; Bullo, F. Voltage Stabilization in Microgrids via Quadratic Droop Control. IEEE Trans. Autom. Control 2017, 62, 1239–1253. [Google Scholar] [CrossRef]
- Dörfler, F.; Bullo, F. Kron reduction of graphs with applications to electrical networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 150–163. [Google Scholar] [CrossRef]
- Schiffer, J.; Zonetti, D.; Ortega, R.; Stanković, A.M.; Sezi, T.; Raisch, J. A survey on modeling of microgrids—From fundamental physics to phasors and voltage sources. Automatica 2016, 74, 135–150. [Google Scholar] [CrossRef]
- Meng, L.; Luna, A.; Diaz, E.; Sun, B.; Dragicevic, T.; Savaghebi, M.; Vasquez, J.; Guerrero, J.; Graells, M. Flexible System Integration and Advanced Hierarchical Control Architectures in the Microgrid Research Laboratory of Aalborg University. IEEE Trans. Ind. Appl. 2015, 52. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameters | Values |
|---|---|
| Nominal amplitude voltage | 311 V |
| Nominal frequency | 50 Hz |
| Filter Inductance | mH |
| Capacitance Filter | 9 F |
| Filter resistor | |
| DC link voltage | 1000 V |
| Danfoss Converter FC302 | kW |
| 94 | |
| Virtual resistance | |
| Virtual reactance | |
| DCPC gain | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Macana, C.A.; Mojica-Nava, E.; Pota, H.R.; Guerrero, J.M.; Vasquez, J.C. A Novel Compact dq-Reference Frame Model for Inverter-Based Microgrids. Electronics 2019, 8, 1326. https://doi.org/10.3390/electronics8111326
Macana CA, Mojica-Nava E, Pota HR, Guerrero JM, Vasquez JC. A Novel Compact dq-Reference Frame Model for Inverter-Based Microgrids. Electronics. 2019; 8(11):1326. https://doi.org/10.3390/electronics8111326
Chicago/Turabian StyleMacana, Carlos A., Eduardo Mojica-Nava, Hemanshu R. Pota, Josep M. Guerrero, and Juan C. Vasquez. 2019. "A Novel Compact dq-Reference Frame Model for Inverter-Based Microgrids" Electronics 8, no. 11: 1326. https://doi.org/10.3390/electronics8111326
APA StyleMacana, C. A., Mojica-Nava, E., Pota, H. R., Guerrero, J. M., & Vasquez, J. C. (2019). A Novel Compact dq-Reference Frame Model for Inverter-Based Microgrids. Electronics, 8(11), 1326. https://doi.org/10.3390/electronics8111326