
Feature Decoupling-Guided Annotation Framework for Surface Defects on Steel Strips

Abstract
1. Introduction
- (1)
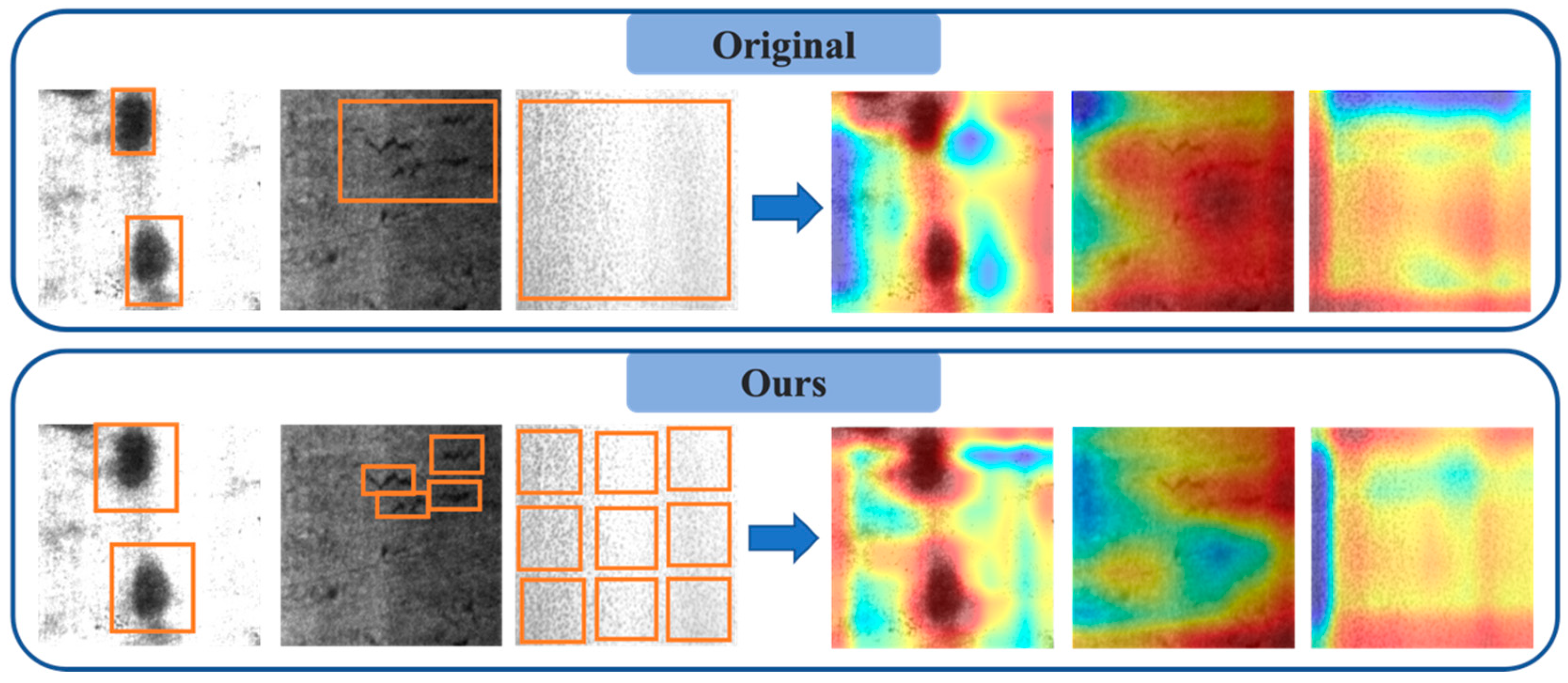
- Proposing a feature decoupling-guided defect representation model: To address the issue of feature aliasing, this model systematically analyzes the grayscale distribution patterns of defects and integrates feature decoupling theory to categorize defects into three typical forms: block, linear, and textured defects. This systematic defect representation approach provides a new analytical perspective for defect annotation, enhances objectivity, and helps annotators better understand and annotate defect features with clarity.
- (2)
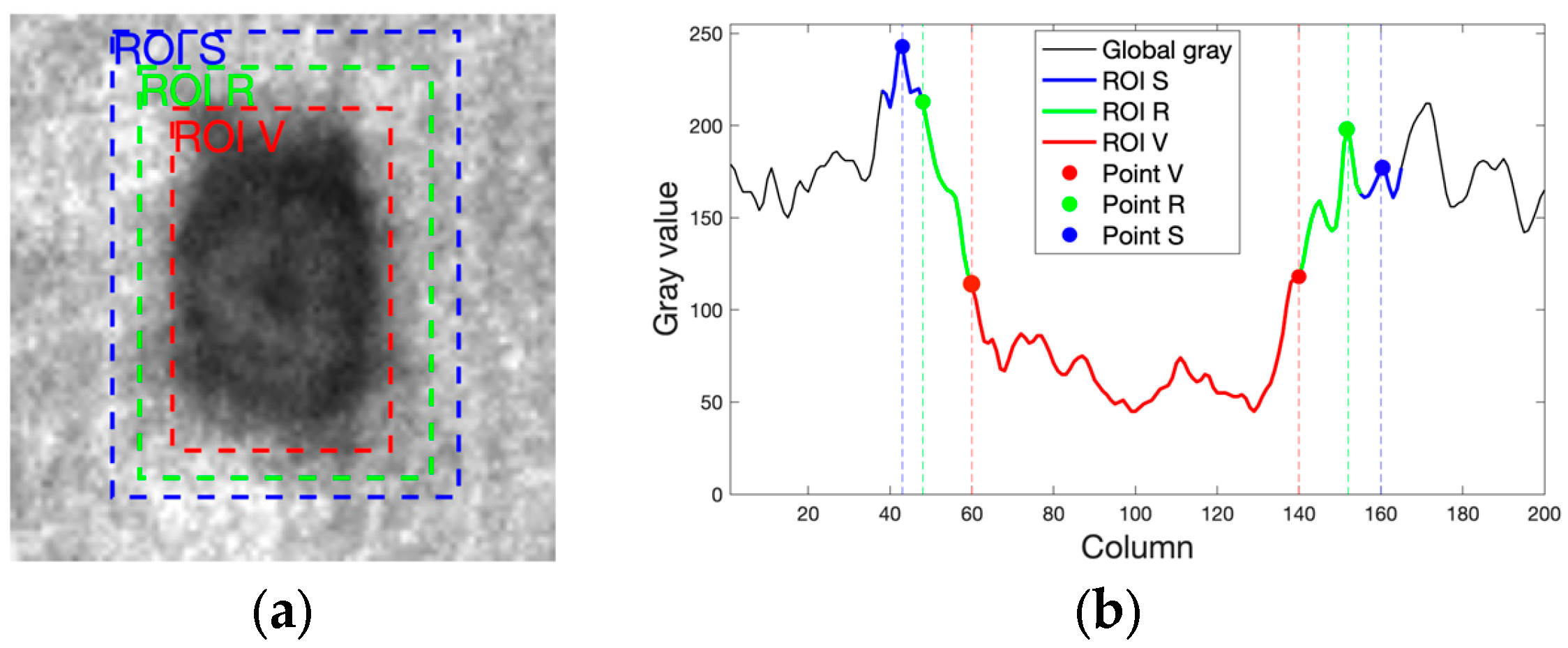
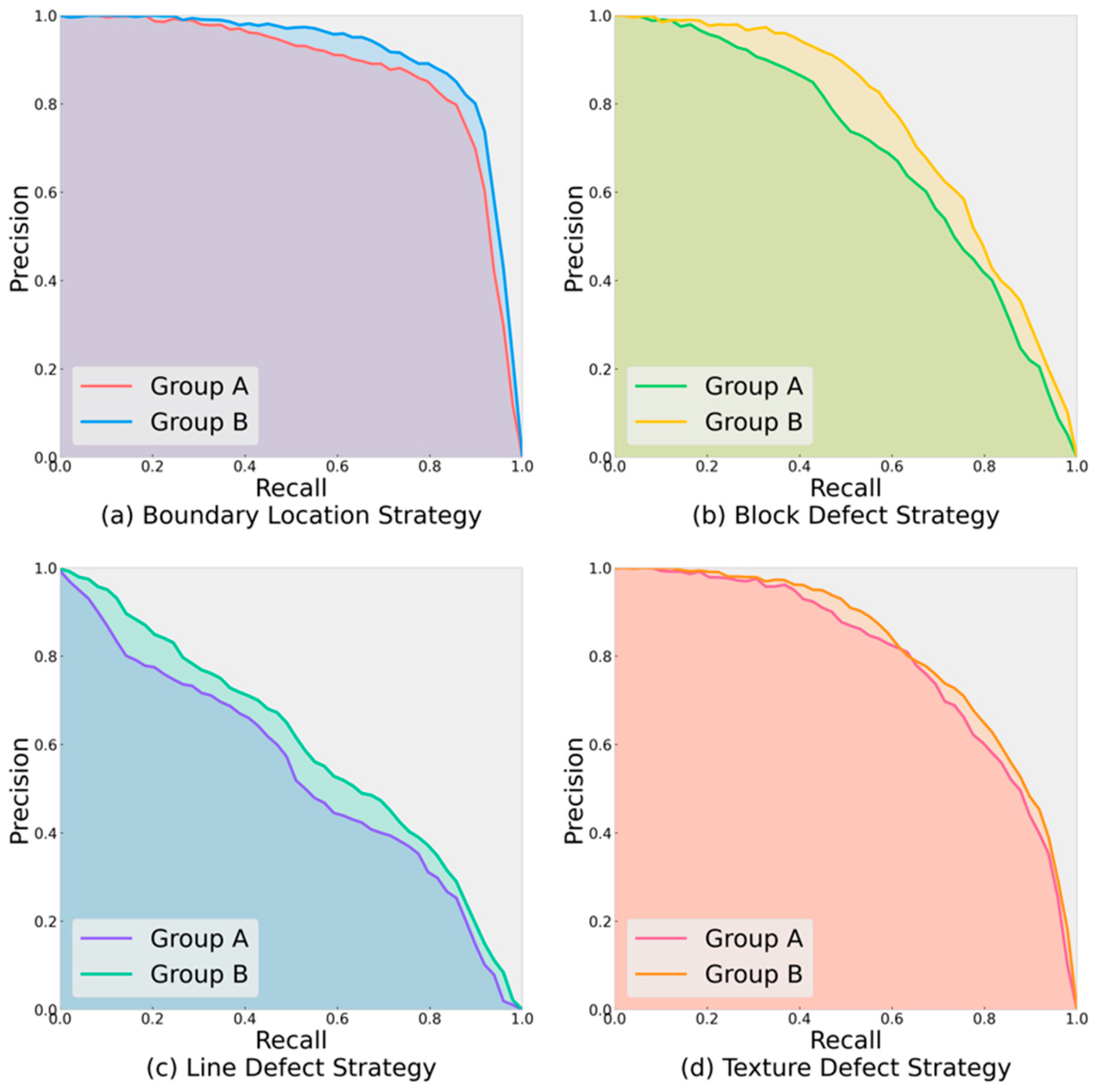
- Developing a feature decoupling-guided annotation strategy: To tackle the issues of uncertain annotation areas and boundary ambiguity, this strategy constructs the minimum annotation units for different defect forms and designs boundary localization strategies based on their respective grayscale distribution patterns. This approach effectively mitigates feature aliasing problems and achieves more precise feature representation.
- (3)
- Establishing a systematic annotation framework: By integrating feature decoupling theory with grayscale distribution analysis, this framework formulates a comprehensive annotation methodology. Experimental results demonstrate that the framework provides systematic practical guidance for annotation, significantly improves the accuracy of feature representation, enhances the detection performance, and offers a practical reference for annotating complex defect scenarios.
2. Methodology
2.1. Defect Representation Model Guided by Feature Decoupling
2.2. Annotation Strategy Based on Minimum Units
2.3. Annotation Framework Based on Feature Decoupling
3. Experiments and Results
3.1. Dataset
3.2. Implementation Details
3.3. Evaluation Metrics
3.4. Ablation Studies on Annotation Strategies
3.5. Evaluation of Model Performance Improvement
4. Discussion
4.1. Analysis of Failure Cases
- (a)
- Over-segmentation issues: For adjacent linear defects with similar features and gradual transitions between segments, the segmentation-based annotation strategy may lead to over-segmentation, causing a single defect to be mistakenly identified as multiple independent segments. This issue was particularly evident in morphologically complex linear defects (e.g., Cr), indicating that the stability of the segmentation strategy still needs optimization.
- (b)
- Boundary ambiguity issues: When neighboring defects are closely spaced and the boundary features are not prominent, the model may exhibit inaccuracies in boundary localization, causing a single complete defect to be incorrectly divided into multiple parts. Although the proposed boundary extension strategy alleviated this issue to some extent, it remains difficult to fully avoid for densely distributed defects.
- (c)
- Boundary delineation deviation: In areas where the transition between the defect and the background is gradual, inconsistencies may arise between the detection result boundaries and the annotated labels. In such cases, even when using the boundary extension annotation strategy, it is challenging to ensure perfect alignment between the detection results and manually annotated boundaries, highlighting the need for further improvement in the strategy’s adaptability to complex backgrounds.

4.2. Analysis of Balance Between Accuracy and Annotation Cost
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yue, H.; Li, X.; Sun, Y.; Zhang, L.; Feng, Y.; Guo, H. ASOD: Attention-based salient object detector for strip steel surface defects. Electronics 2025, 14, 831. [Google Scholar] [CrossRef]
- Han, L.; Li, N.; Li, J.; Gao, B.; Niu, D. SA-FPN: Scale-aware attention-guided feature pyramid network for small object detection on surface defect detection of steel strips. Meas. J. Int. Meas. Confed. 2025, 249, 117019. [Google Scholar] [CrossRef]
- Zhang, L.; Fu, Z.; Guo, H.; Feng, Y.; Sun, Y.; Wang, Z. TAFENet: A two-stage attention-based feature-enhancement network for strip steel surface defect detection. Electronics 2024, 13, 3721. [Google Scholar] [CrossRef]
- Chen, H.; Du, Y.; Fu, Y.; Zhu, J.; Zeng, H. DCAM-Net: A rapid detection network for strip steel surface defects based on deformable convolution and attention mechanism. IEEE Trans. Instrum. Meas. 2023, 72, 5005312. [Google Scholar] [CrossRef]
- Chen, B.; Wei, M.; Liu, J.; Li, H.; Dai, C.; Liu, J.; Ji, Z. EFS-YOLO: A lightweight network based on steel strip surface defect detection. Meas. Sci. Technol. 2024, 35, 116003. [Google Scholar] [CrossRef]
- Lu, M.; Sheng, W.; Zou, Y.; Chen, Y.; Chen, Z. WSS-YOLO: An improved industrial defect detection network for steel surface defects. Meas. J. Int. Meas. Confed. 2024, 236, 115060. [Google Scholar] [CrossRef]
- Shen, K.; Zhou, X.; Liu, Z. MINet: Multiscale interactive network for real-time salient object detection of strip steel surface defects. IEEE Trans. Ind. Inform. 2024, 20, 7842–7852. [Google Scholar] [CrossRef]
- Liu, R.; Huang, M.; Gao, Z.; Cao, Z.; Cao, P. MSC-DNet: An efficient detector with multi-scale context for defect detection on strip steel surface. Meas. J. Int. Meas. Confed. 2023, 209, 112467. [Google Scholar] [CrossRef]
- Bishop, C.M.; Nasrabadi, N.M. Pattern Recognition and Machine Learning; Springer: Cham, Switzerland, 2006. [Google Scholar]
- Agnew, C.; Scanlan, A.; Denny, P.; Grua, E.M.; van de Ven, P.; Eising, C. Annotation Quality Versus Quantity for Object Detection and Instance Segmentation. IEEE Access 2024, 12, 140958–140977. [Google Scholar] [CrossRef]
- Lin, T.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollar, P.; Zitnick, C.L. Microsoft COCO: Common objects in context. In Proceedings of the Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Kumar, S.S.; Wang, M.; Abraham, D.M.; Jahanshahi, M.R.; Iseley, T.; Cheng, J.C. Deep learning–based automated detection of sewer defects in CCTV videos. J. Comput. Civ. Eng. 2020, 34, 04019047. [Google Scholar] [CrossRef]
- Guo, J.; Wang, Q.; Li, Y. Façade defects classification from imbalanced dataset using meta learning-based convolutional neural network. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 1403–1418. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, B.; Wang, X. Impact of annotation quality on model performance of welding defect detection using deep learning. Weld. World 2024, 68, 855–865. [Google Scholar] [CrossRef]
- Guo, J.; Wang, Q.; Li, Y. Evaluation-oriented façade defects detection using rule-based deep learning method. Autom. Constr. 2021, 131, 103910. [Google Scholar] [CrossRef]
- Byunghyun, K.; Soojin, C. Image-based concrete crack assessment using mask and region-based convolutional neural network. Struct. Control. Health Monit. 2019, 26, e2381.1–e2381.15. [Google Scholar] [CrossRef]
- Zhao, S.; Zhang, D.; Xue, Y.; Zhou, M.; Huang, H. A deep learning-based approach for refined crack evaluation from shield tunnel lining images. Autom. Constr. 2021, 132, 103934. [Google Scholar] [CrossRef]
- Tu, H.; Yu, Z.; Menzies, T. Better data labelling with EMBLEM (and how that impacts defect prediction). IEEE Trans. Softw. Eng. 2022, 48, 278–294. [Google Scholar] [CrossRef]
- Yang, H.; Song, K.; Mao, F.; Yin, Z. Autolabeling-enhanced active learning for cost-efficient surface defect visual classification. IEEE Trans. Instrum. Meas. 2021, 70, 5004815. [Google Scholar] [CrossRef]
- Yang, W.; Zhou, Y.; Meng, G. Improving the Efficiency of Steel Plate Surface Defect Classification by Reducing the Labelling Cost Using Deep Active Learning. Stroj. Vestn. J. Mech. Eng. 2024, 70, 554–568. [Google Scholar] [CrossRef]
- Ran, G.; Yao, X.; Wang, K.; Ye, J.; Ou, S. Sketch-guided spatial adaptive normalization and high-level feature constraints-based GAN image synthesis for steel strip defect detection data augmentation. Meas. Sci. Technol. 2024, 35, 045408. [Google Scholar] [CrossRef]
- Putri, W.R.; Li, Y.-H.; Wang, J.C. Advancing Robust Few-shot Surface Defect Detection through Meta-learning. In Proceedings of the 2024 9th International Conference on Integrated Circuits, Design, and Verification (ICDV), Hanoi, Vietnam, 6–7 June 2024; pp. 45–48. [Google Scholar] [CrossRef]
- Yang, C.; Wu, W.; Wang, Y.; Zhou, H. A novel feature-based model for zero-shot object detection with simulated attributes. Appl. Intell. 2022, 52, 6905–6914. [Google Scholar] [CrossRef]
- Zhao, S.; Zhong, R.Y.; Wang, J.; Xu, C.; Zhang, J. Unsupervised fabric defects detection based on spatial domain saliency and features clustering. Comput. Ind. Eng. 2023, 185, 109681. [Google Scholar] [CrossRef]
- Hoyer, P.O. Natural image statistics and efficient coding. In Proceedings of the IEEE Workshop on Neural Networks for Signal Processing, Martigny, Switzerland, 6 September 2002; pp. 557–565. [Google Scholar]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Song, K.; Yan, Y. A noise robust method based on completed local binary patterns for hot-rolled steel strip surface defects. Appl. Surf. Sci. 2013, 285, 858–864. [Google Scholar] [CrossRef]
- Fisher, R.A. The use of multiple measurements in taxonomic problems. Ann. Eugen. 1936, 7, 179–188. [Google Scholar] [CrossRef]
- Everingham, M.; Eslami, S.M.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes challenge: A retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- He, Y.; Song, K.; Meng, Q.; Yan, Y. An end-to-end steel surface defect detection approach via fusing multiple hierarchical features. IEEE Trans. Instrum. Meas. 2020, 69, 1493–1504. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the International Conference on Learning Representations (ICLR), San Diego, CA, USA, 7–9 June 2015; pp. 1–14. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade R-CNN: High quality object detection and instance segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 1483–1498. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single shot multibox detector. In Computer vision–ECCV 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Varghese, R.; Sambath, M. YOLOv8: A novel object detection algorithm with enhanced performance and robustness. In Proceedings of the 2024 International Conference on Advances in Data Engineering and Intelligent Computing Systems (ADICS), Chennai, India, 18–19 April 2024. [Google Scholar]
- Zhu, X.; Su, W.; Lu, L.; Li, B.; Wang, X.; Dai, J. Deformable detr: Deformable transformers for end-to-end object detection. arXiv 2020, arXiv:2010.04159. [Google Scholar]
- Zhao, Y.; Lv, W.; Xu, S.; Wei, J.; Wang, G.; Dang, Q.; Liu, Y.; Chen, J. DETRs beat YOLOs on real-time object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Cr | In | Pa | Ps | Rs | Sc | Total |
|---|---|---|---|---|---|---|---|
| Original | 689 | 981 | 875 | 430 | 608 | 525 | 4108 |
| Ours | 2597 | 1453 | 1054 | 2279 | 3507 | 913 | 11,803 |
| Item | Parameter | Value |
|---|---|---|
| Training parameters | Optimizer | Adam |
| Batch size | 16 | |
| Learning rate | 0.0001 | |
| Epochs | 200 | |
| Weight decay | 1 × 10−4 | |
| Learning rate decay factor | 0.1 | |
| Data augmentation | Random rotation | ±10° |
| Random horizontal flip | Probability of 0.5 | |
| Random vertical flip | Probability of 0.5 |
| Strategy | AP (%) | (%) | (%) | AP | |||
|---|---|---|---|---|---|---|---|
| A | B | A | B | A | B | ||
| Boundary Positioning Strategy | 84.9 | 89.6 | 86.6 | 87.3 | 81.9 | 88.4 | +2.7 |
| Independent Unit Strategy for Block Defects | 68.8 | 75.4 | 75.4 | 83.8 | 66.1 | 71.7 | +6.6 |
| Directional Segmentation Strategy for Linear Defects | 42.9 | 50.7 | 72.6 | 79.4 | 67.3 | 78.6 | +7.8 |
| Local Window Strategy for Texture Defects | 79.1 | 80.3 | 85.3 | 84.6 | 89.8 | 90.1 | +1.2 |
| Method | Labels | AP% | mAP% | |||||
|---|---|---|---|---|---|---|---|---|
| Cr | In | Pa | Ps | Rs | Sc | |||
| Faster R-CNN | Original | 42.9 | 67.9 | 84.9 | 79.1 | 68.8 | 89.9 | 72.3 |
| New | 50.7 | 76.5 | 89.6 | 80.3 | 75.4 | 95.3 | 78.0 | |
| SSD | Original | 37.4 | 77.3 | 89.7 | 75.9 | 60.4 | 84.3 | 70.8 |
| New | 46.3 | 79.6 | 93.9 | 78.8 | 64.8 | 88.1 | 75.3 | |
| Cascade R-CNN | Original | 41.3 | 78.6 | 93.9 | 92.4 | 63.9 | 91.9 | 77.0 |
| New | 51.8 | 82.4 | 94.1 | 93.1 | 71.2 | 93.6 | 81.0 | |
| Deformable DETR | Original | 26.4 | 66.0 | 73.7 | 67.1 | 39.1 | 78.1 | 58.4 |
| New | 40.2 | 73.1 | 89.6 | 70.2 | 56.4 | 83.8 | 68.9 | |
| YOLOv8n | Original | 46.7 | 81.4 | 94.3 | 91.5 | 66.6 | 93.0 | 78.9 |
| New | 49.1 | 82.7 | 95.4 | 90.9 | 68.4 | 94.8 | 80.2 | |
| RT-DETR-R18 | Original | 47.9 | 78.7 | 96.0 | 91.4 | 67.6 | 94.2 | 79.3 |
| New | 50.6 | 83.9 | 97.2 | 92.4 | 76.3 | 95.1 | 82.6 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, W.; Liu, W. Feature Decoupling-Guided Annotation Framework for Surface Defects on Steel Strips. Electronics 2025, 14, 2304. https://doi.org/10.3390/electronics14112304
Yuan W, Liu W. Feature Decoupling-Guided Annotation Framework for Surface Defects on Steel Strips. Electronics. 2025; 14(11):2304. https://doi.org/10.3390/electronics14112304
Chicago/Turabian StyleYuan, Weiqi, and Wentao Liu. 2025. "Feature Decoupling-Guided Annotation Framework for Surface Defects on Steel Strips" Electronics 14, no. 11: 2304. https://doi.org/10.3390/electronics14112304
APA StyleYuan, W., & Liu, W. (2025). Feature Decoupling-Guided Annotation Framework for Surface Defects on Steel Strips. Electronics, 14(11), 2304. https://doi.org/10.3390/electronics14112304