
Development of Robotic System for Exploration in Extreme Cold Regions (Tested in Antarctica)


Abstract
1. Introduction
2. Design of Robotic System for Exploration
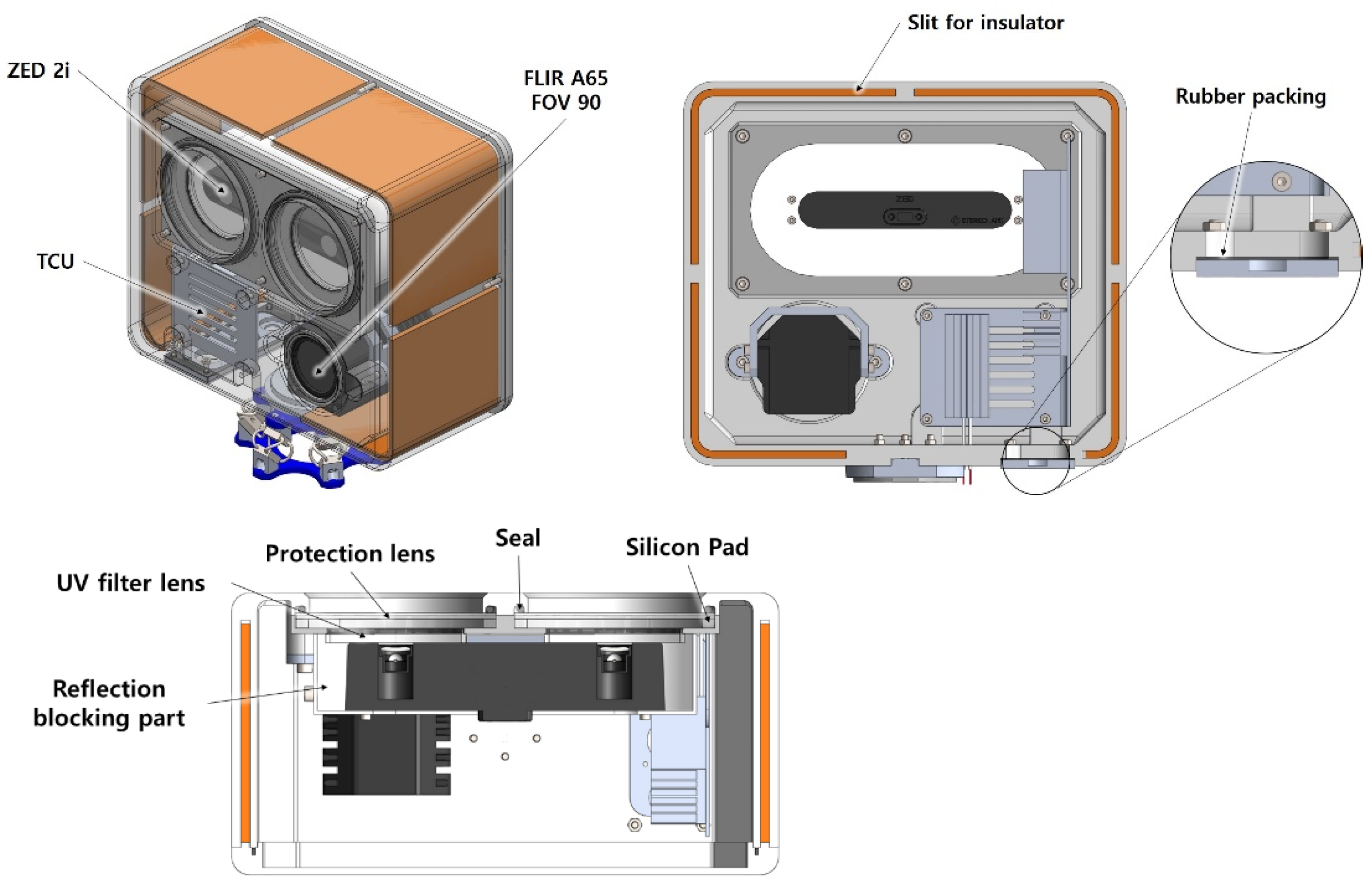
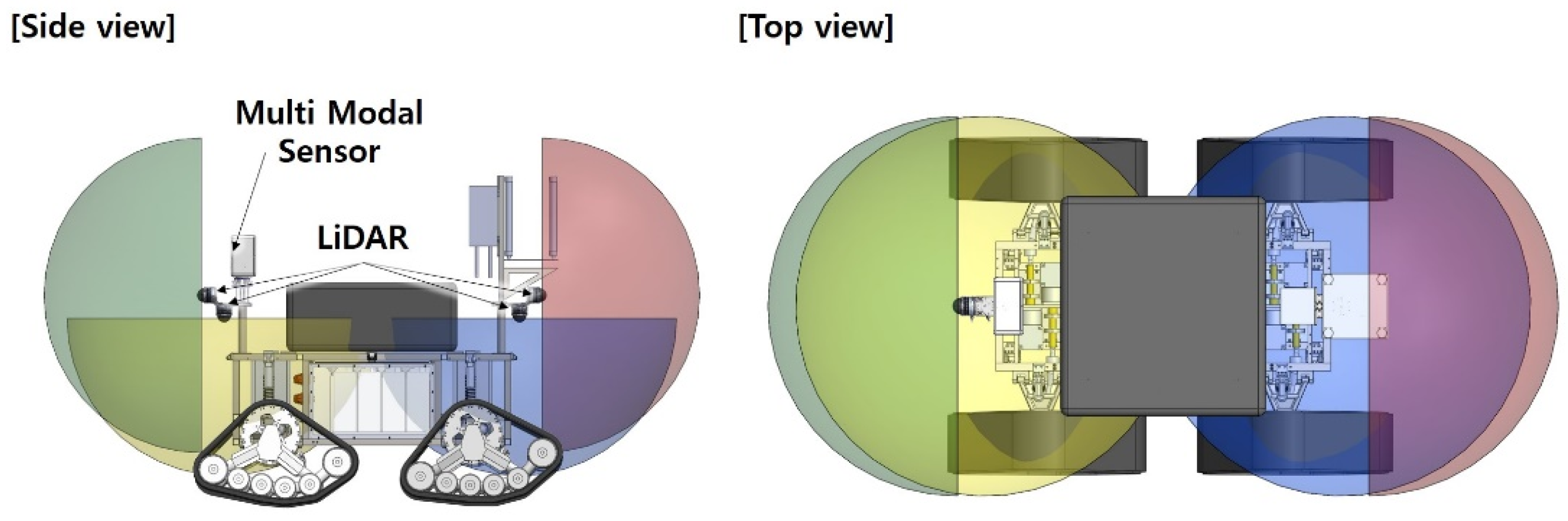
2.1. Design of Multimodal Sensor Module
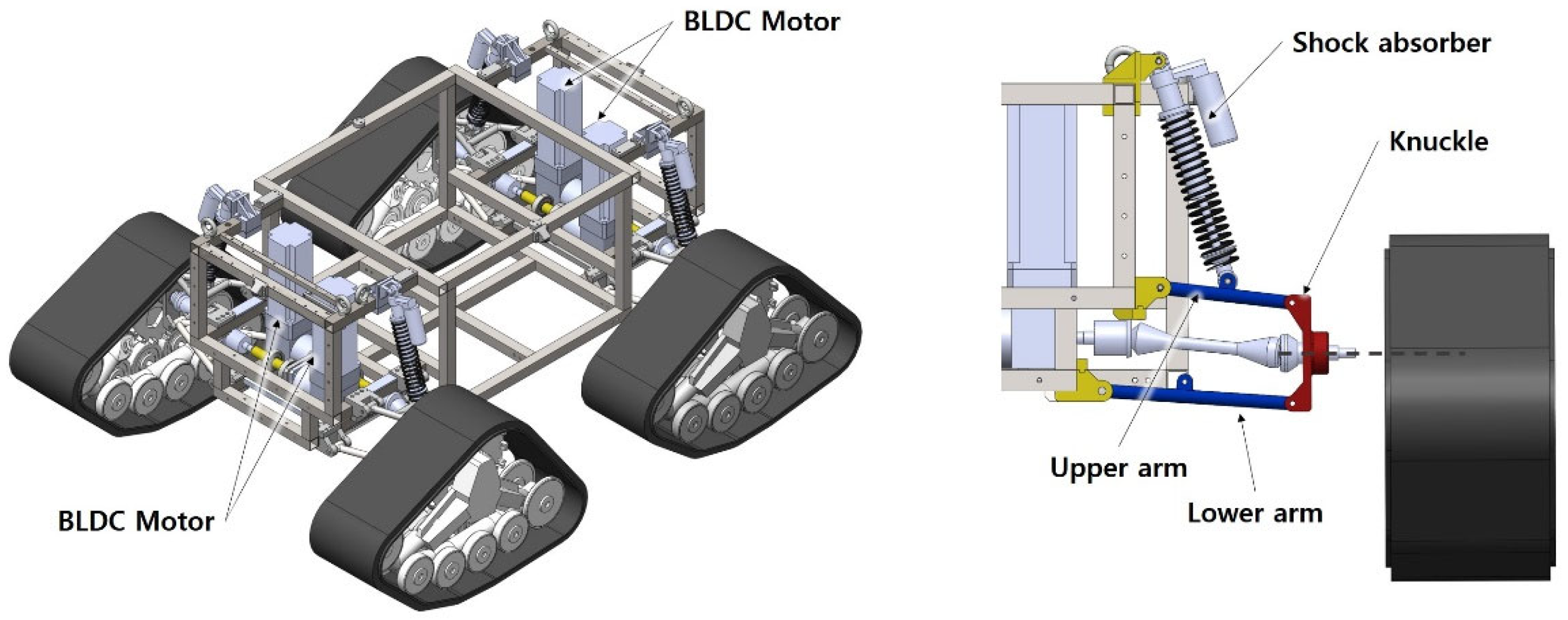
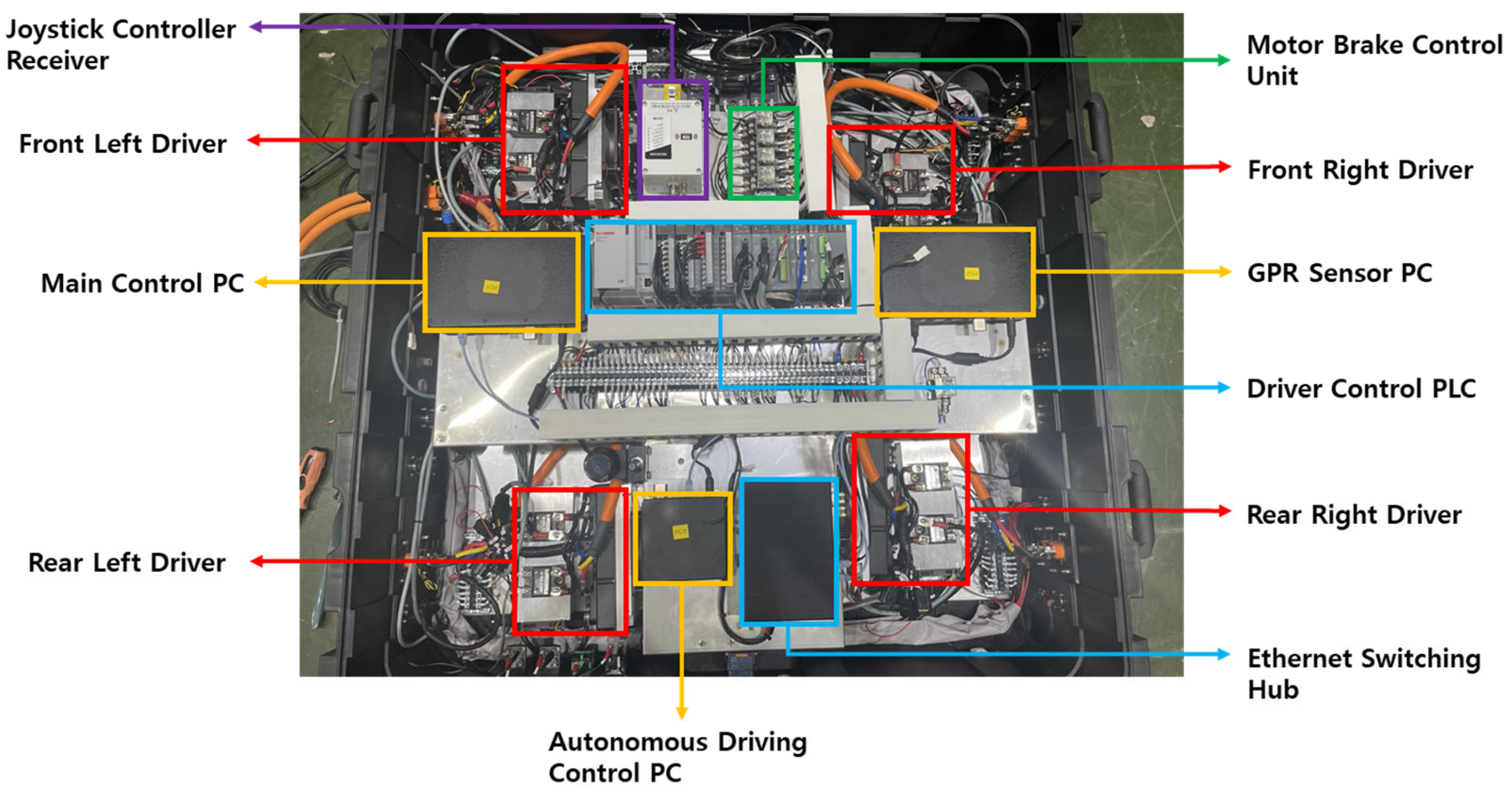
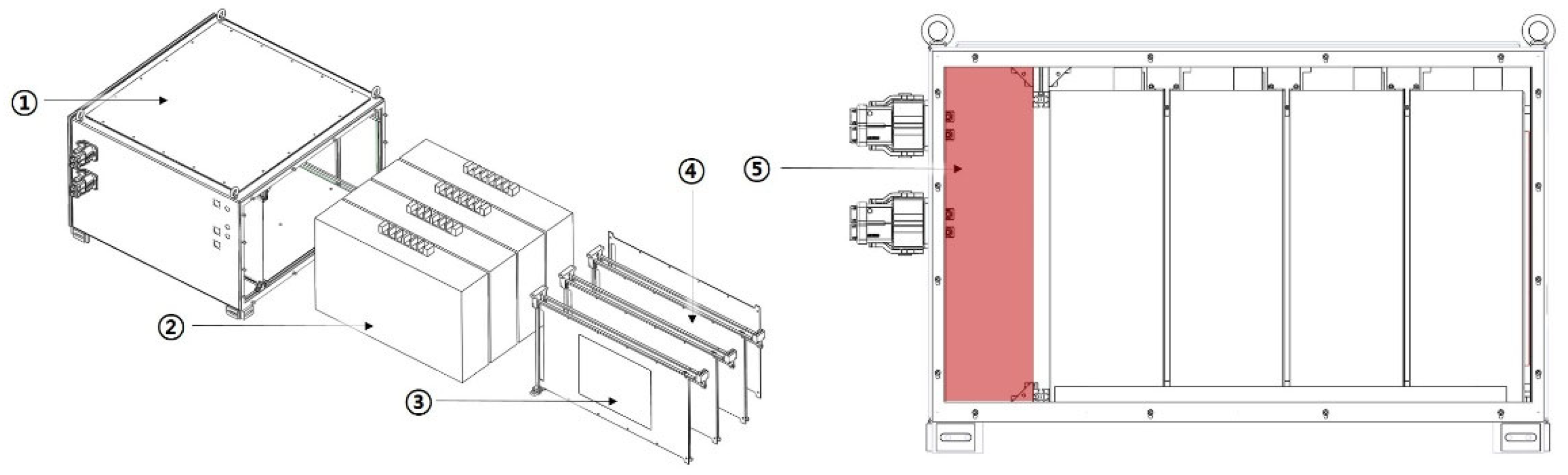
2.2. Design of Robotic System
3. Performance Tests of Robotic System
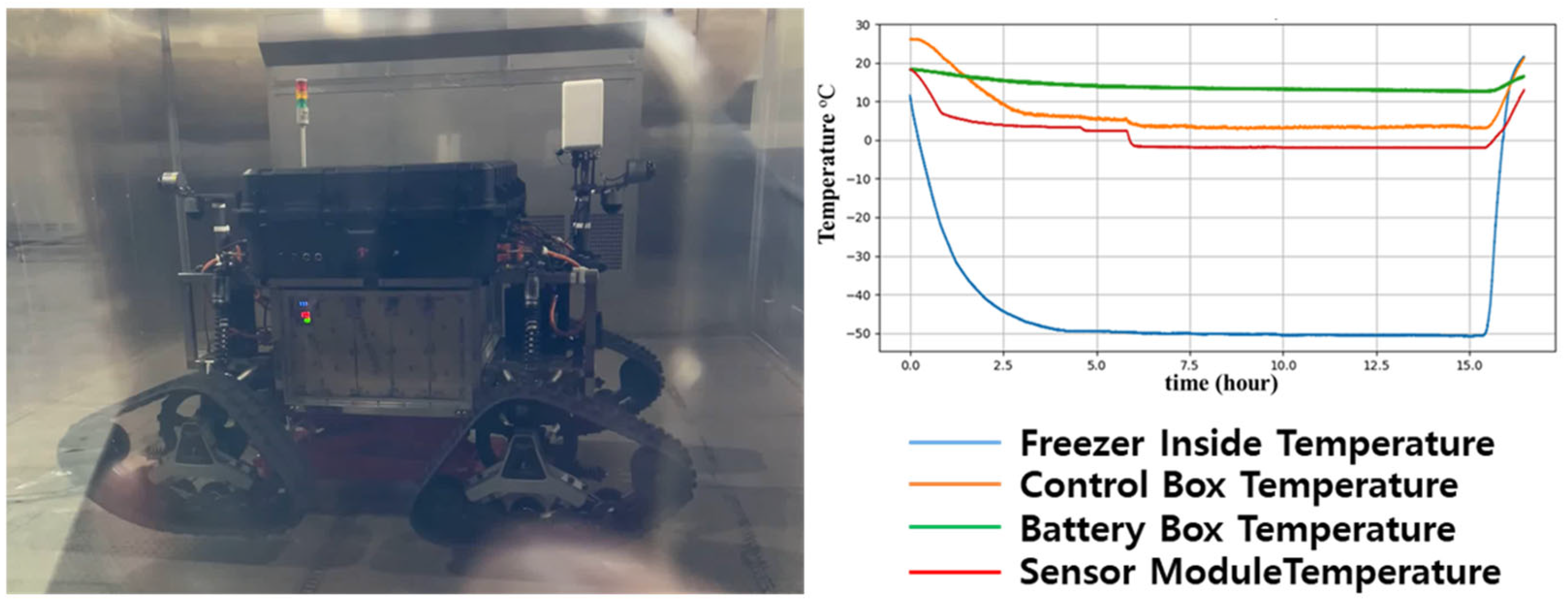
3.1. Freezing Chamber Test
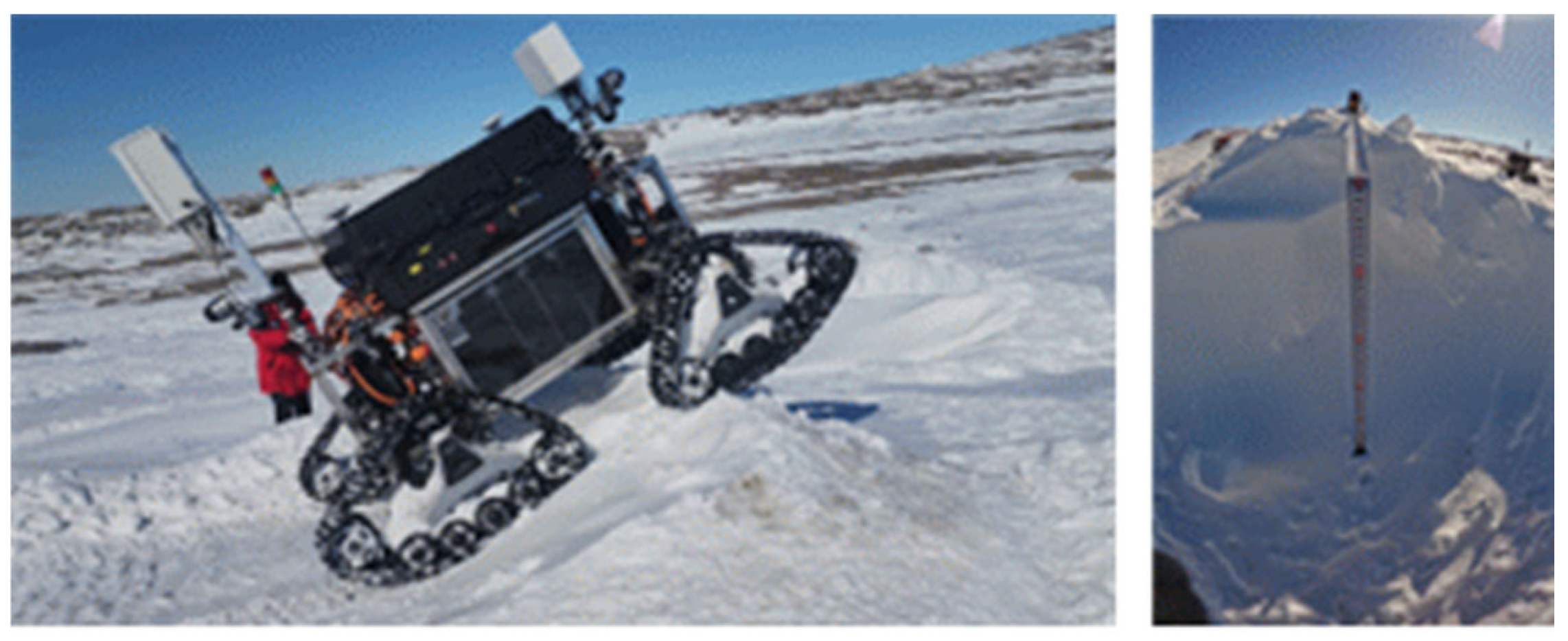
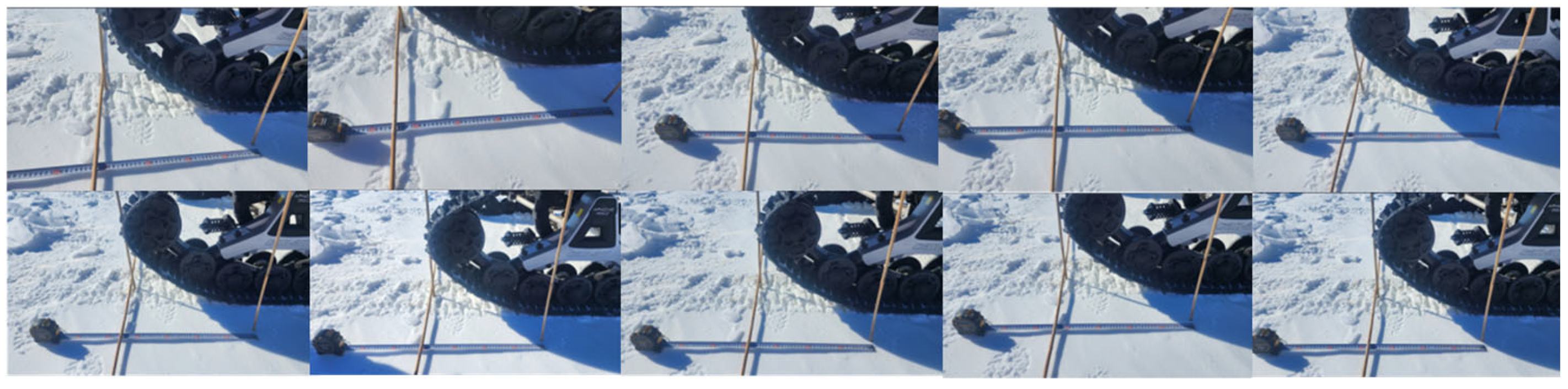
3.2. Antarctic Environmental Robot Performance Test
- Overcoming obstacles with height differences of 50 cm or more;
- Crossing crevasses of 30 cm or wider;
- Stopping distance of 65 cm or less;
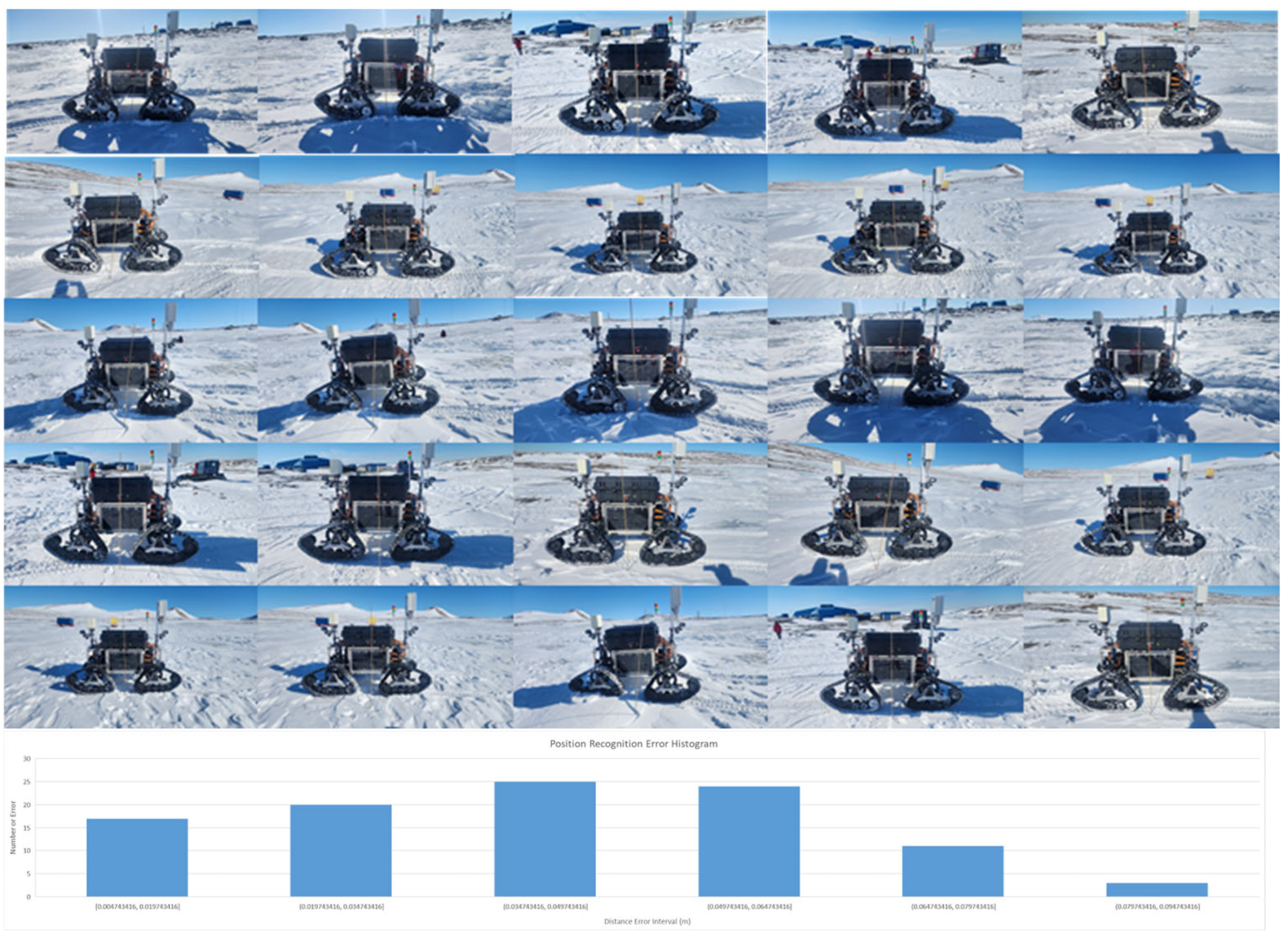
- Position accuracy error of 15 cm or less based on multimodal sensor data.
4. Antarctic Environmental Operational Test
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Apostolopoulos, D.S.; Pedersen, L.; Shamah, B.N.; Shillcutt, K.; Wagner, M.D.; Whittaker, W.L. Robotic Antarctic meteorite search: Outcomes. In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Republic of Korea, 21–26 May 2001; Volume 4, pp. 4174–4179. [Google Scholar]
- Chin, M.A. Antarctica: A Test Bed for Space Exploration. 2003. Available online: http://hdl.handle.net/10092/14005 (accessed on 11 May 2025).
- Pedersen, L.; Apostolopoulos, D.; Whittaker, W. Bayes Networks on Ice: Robotic Search for Antarctic Meteorites. In Proceedings of the Advances in Neural Information Processing Systems, Denver, CO, USA, 27 November–2 December 2000; pp. 1–7. [Google Scholar]
- Pedersen, L.; Wagner, M.; Apostolopoulos, D.; Whittaker, W.R. Autonomous robotic meteorite identification in Antarctica. In Proceedings of the 2001 IEEE International Conference on Robotics and Automation, Seoul, Republic of Korea, 21–26 May 2001; pp. 4158–4165. [Google Scholar]
- Wagner, M.D.; Apostolopoulos, D.; Shillcutt, K.; Shamah, B.; Simmons, R.; Whittaker, W.R. The science autonomy system of the Nomad robot. In Proceedings of the 2001 IEEE International Conference on Robotics and Automation, Seoul, Republic of Korea, 21–26 May 2001; pp. 1742–1749. [Google Scholar]
- Urmson, C.; Shamah, B.; Teza, J.; Wagner, M.D.; Apostolopoulos, D.; Whittaker, W.L. A sensor arm for robotic Antarctic meteorite search. In Proceedings of the 3rd International Conference on Field and Service Robotics, Helsinki, Finland, 11–13 July 2001. [Google Scholar]
- He, Y.; Chen, C.; Bu, C.; Han, J. A polar rover for large-scale scientific surveys: Design, implementation and field test results. Int. J. Adv. Robot. Syst. 2015, 12, 145. [Google Scholar] [CrossRef]
- Lever, J.H.; Delaney, A.J.; Ray, L.E.; Trautmann, E.; Barna, L.A.; Burzynski, A.M. Autonomous GPR surveys using the polar rover Yeti. J. Field Robot. 2012, 30, 194–215. [Google Scholar] [CrossRef]
- Chung, C.; Kim, H.-K.; Yoon, D.-J.; Lee, J. Development of an unmanned ground robot platform for polar regions: GENTU. Korea Robot. Soc. Rev. 2023, 20, 19–27. [Google Scholar]
- Guo, L.; Liu, G.; Luo, Y.; Jiang, P.; Zhao, J. A wind-electric hybrid polar roaming robot: Design, modeling, and experiments. J. Field Robot. 2024, 41, 131–143. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, G.; Guo, L.; Zhu, Y.; Zhao, J. Scalable Wing Sailing and Snowboarding Enhance Efficient and Energy-Saving Mobility of Polar Robot. IEEE/ASME Trans. Mechatron. 2024, 29, 3833–3844. [Google Scholar] [CrossRef]
- Apostolopoulos, D.S.; Wagner, M.D.; Shamah, B.N.; Pedersen, L.; Shillcutt, K.; Whittaker, W.L. Technology and field demonstration of robotic search for Antarctic meteorites. Int. J. Robot. Res. 2000, 19, 1015–1032. [Google Scholar] [CrossRef]
- Turner, J.; Marshall, G.J.; Clem, K.; Colwell, S.; Phillips, T.; Lu, H. Antarctic temperature variability and change from station data. Int. J. Climatol. 2020, 40, 2986–3007. [Google Scholar] [CrossRef]
- Pomerleau, F. Robotics in snow and ice. arXiv 2022, arXiv:2208.05095. [Google Scholar]
- Sevinchan, E.; Dincer, I.; Lang, H. A review on thermal management methods for robots. Appl. Therm. Eng. 2018, 140, 799–813. [Google Scholar] [CrossRef]
- Uhm, T.; Noh, K.; Hwang, H.; Kim, J.-C.; Lee, H.-J.; Choi, Y.-H. Multi-modal sensor module for Antarctica exploration robots. In Proceedings of the 2023 IEEE International Conference on Consumer Electronics, Las Vegas, NV, USA, 6–8 January 2023. [Google Scholar]
- Bpearl, RoboSense/Suteng Innovation Technology Co., Ltd. Available online: https://www.robosense.ai/en/rslidar/Bpearl (accessed on 12 May 2025).
- KEMOS. Available online: http://live.kopri.re.kr/kemos/ (accessed on 12 May 2025).
- Kwon, J.; Lee, H.; Lee, J.; Lee, N.; Kim, J.; Uhm, T.; Choi, Y. UWB-Based Human-Following System with Obstacle and Crevasse Avoidance for Polar-Exploration Robots. Appl. Sci. 2024, 14, 6918. [Google Scholar] [CrossRef]
- Kim, S.; Lee, H. Multi-robot task scheduling with ant colony optimization in antarctic environments. Sensors 2023, 23, 751. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zed 2i | Flir A65 | |
|---|---|---|
| Operating temperature | −10 °C to +50 °C | −15 °C to +50 °C |
| Item | Specification |
|---|---|
| Platform dimension | 1770 mm × 2490 mm × 1750 mm |
| Weight without battery | 550 kg |
| Battery | 100 A {72 V} × 4 EA |
| Operating temperature | −50 °C~ |
| Payload | 100 kg |
| Maximum speed | 30 km/h |
| BLDC motor | 3000 W, 72 V, 12 Kg, holding torque 10 Nm |
| Motor driver | 36–126 V (8–30 S safe), continuous max 500 A |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uhm, T.; Kwon, J.; Noh, K.; Kim, J.; Lee, H.; Choi, Y. Development of Robotic System for Exploration in Extreme Cold Regions (Tested in Antarctica). Electronics 2025, 14, 1983. https://doi.org/10.3390/electronics14101983
Uhm T, Kwon J, Noh K, Kim J, Lee H, Choi Y. Development of Robotic System for Exploration in Extreme Cold Regions (Tested in Antarctica). Electronics. 2025; 14(10):1983. https://doi.org/10.3390/electronics14101983
Chicago/Turabian StyleUhm, Taeyoung, Jiwook Kwon, Kyoungseok Noh, Jongchan Kim, Hyojun Lee, and Youngho Choi. 2025. "Development of Robotic System for Exploration in Extreme Cold Regions (Tested in Antarctica)" Electronics 14, no. 10: 1983. https://doi.org/10.3390/electronics14101983
APA StyleUhm, T., Kwon, J., Noh, K., Kim, J., Lee, H., & Choi, Y. (2025). Development of Robotic System for Exploration in Extreme Cold Regions (Tested in Antarctica). Electronics, 14(10), 1983. https://doi.org/10.3390/electronics14101983