A 50.5 ns Wake-Up-Latency 11.2 pJ/Inst Asynchronous Wake-Up Controller in FDSOI 28 nm


Abstract
1. Introduction
2. Results
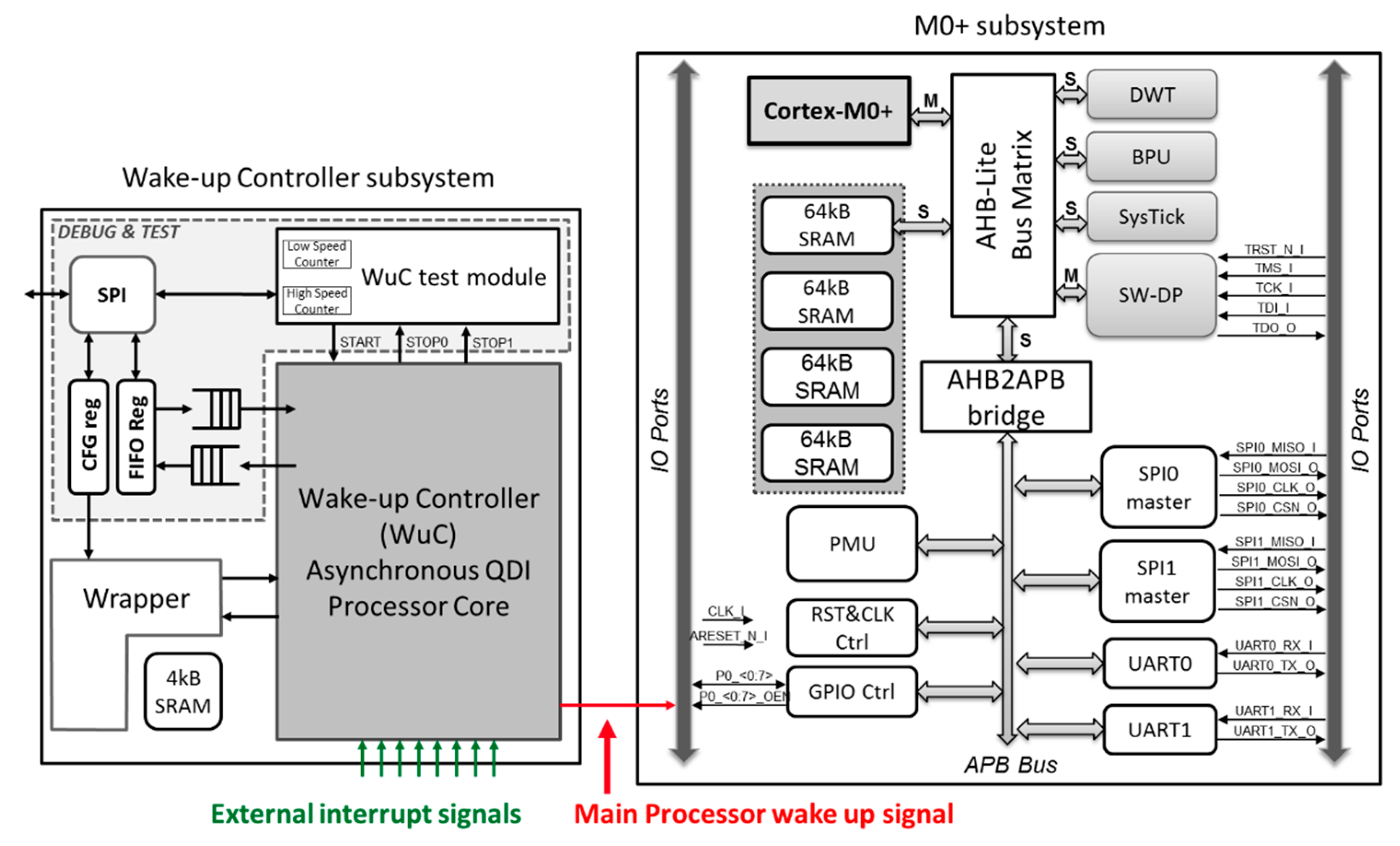
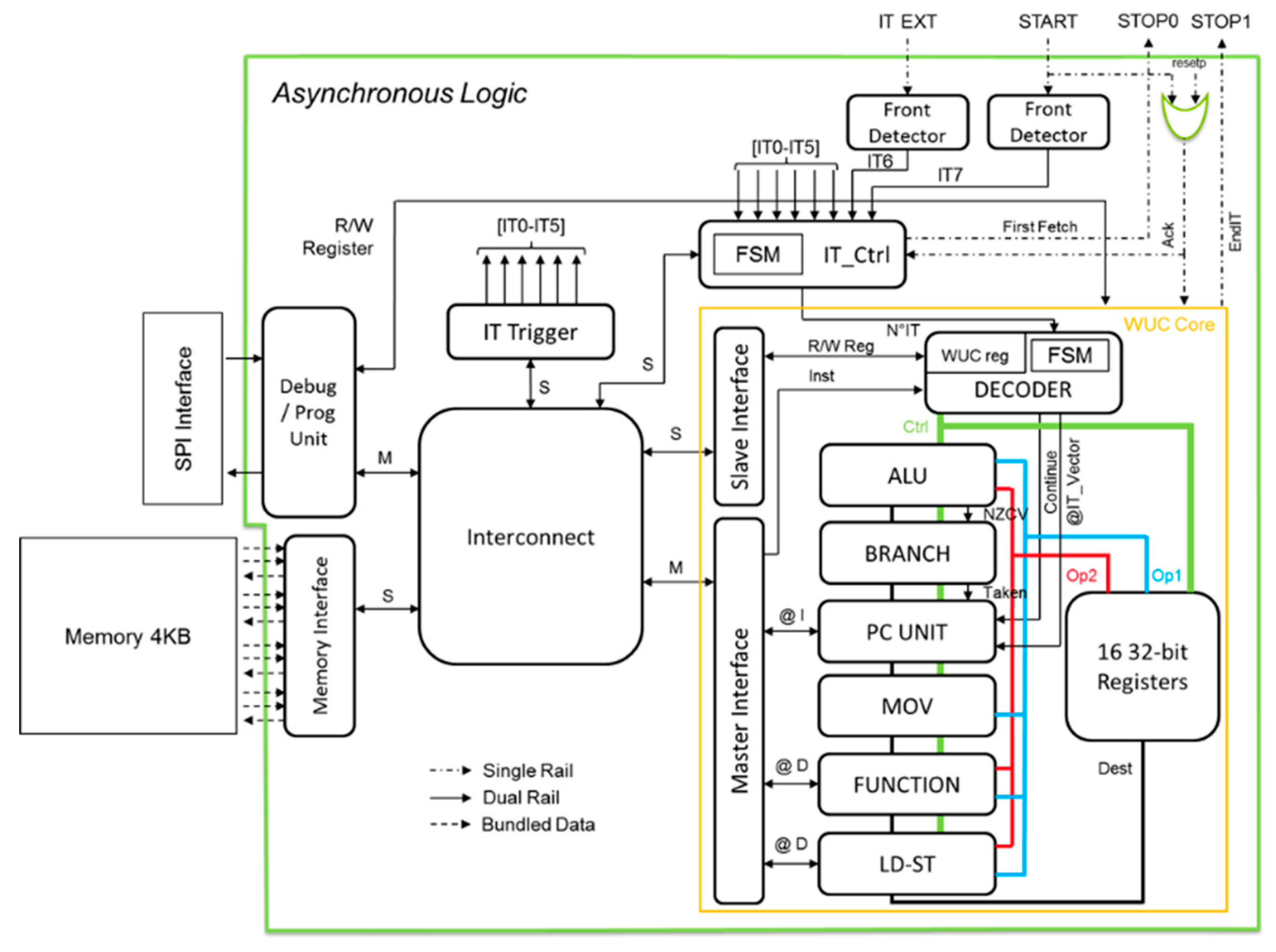
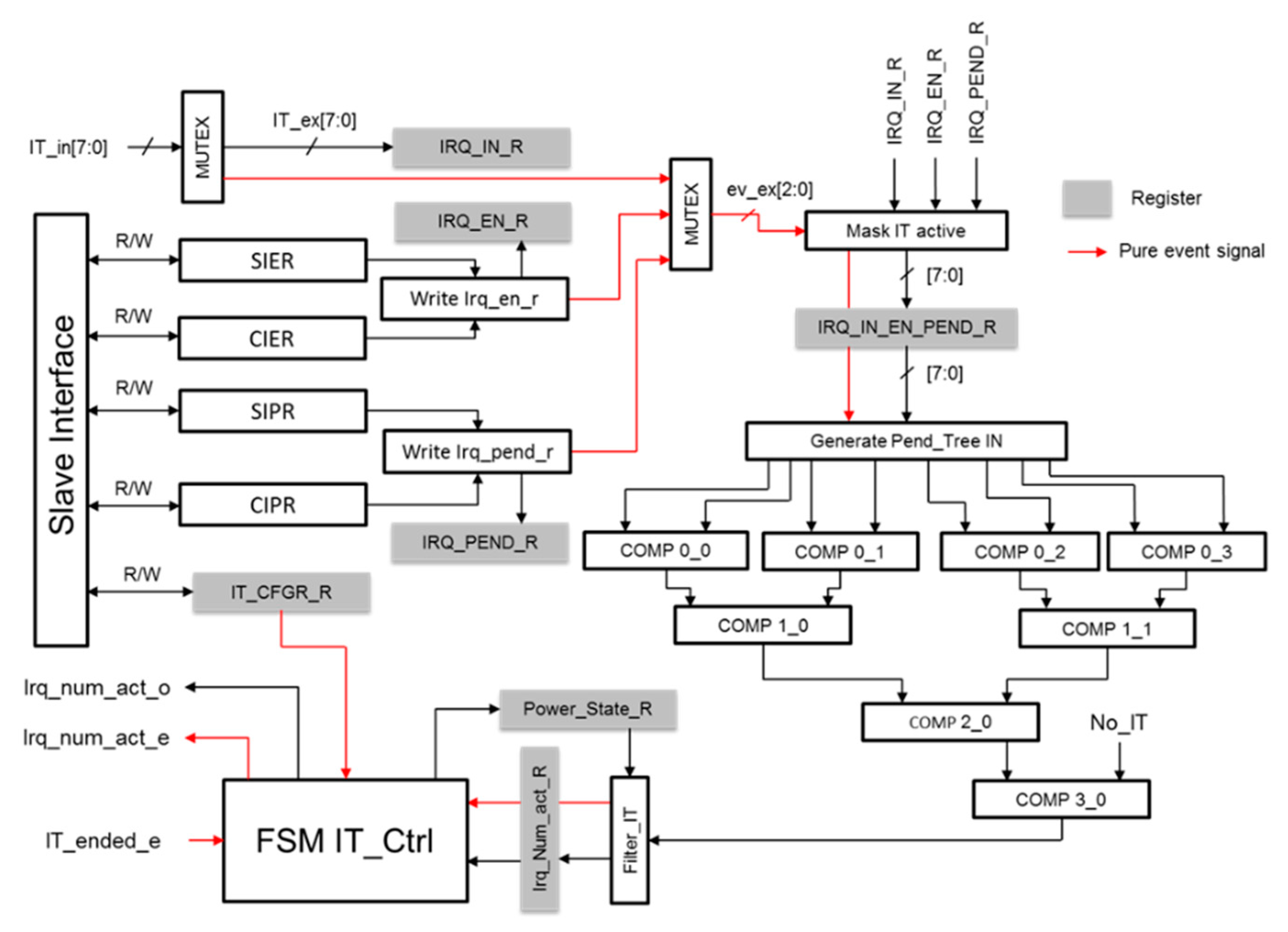
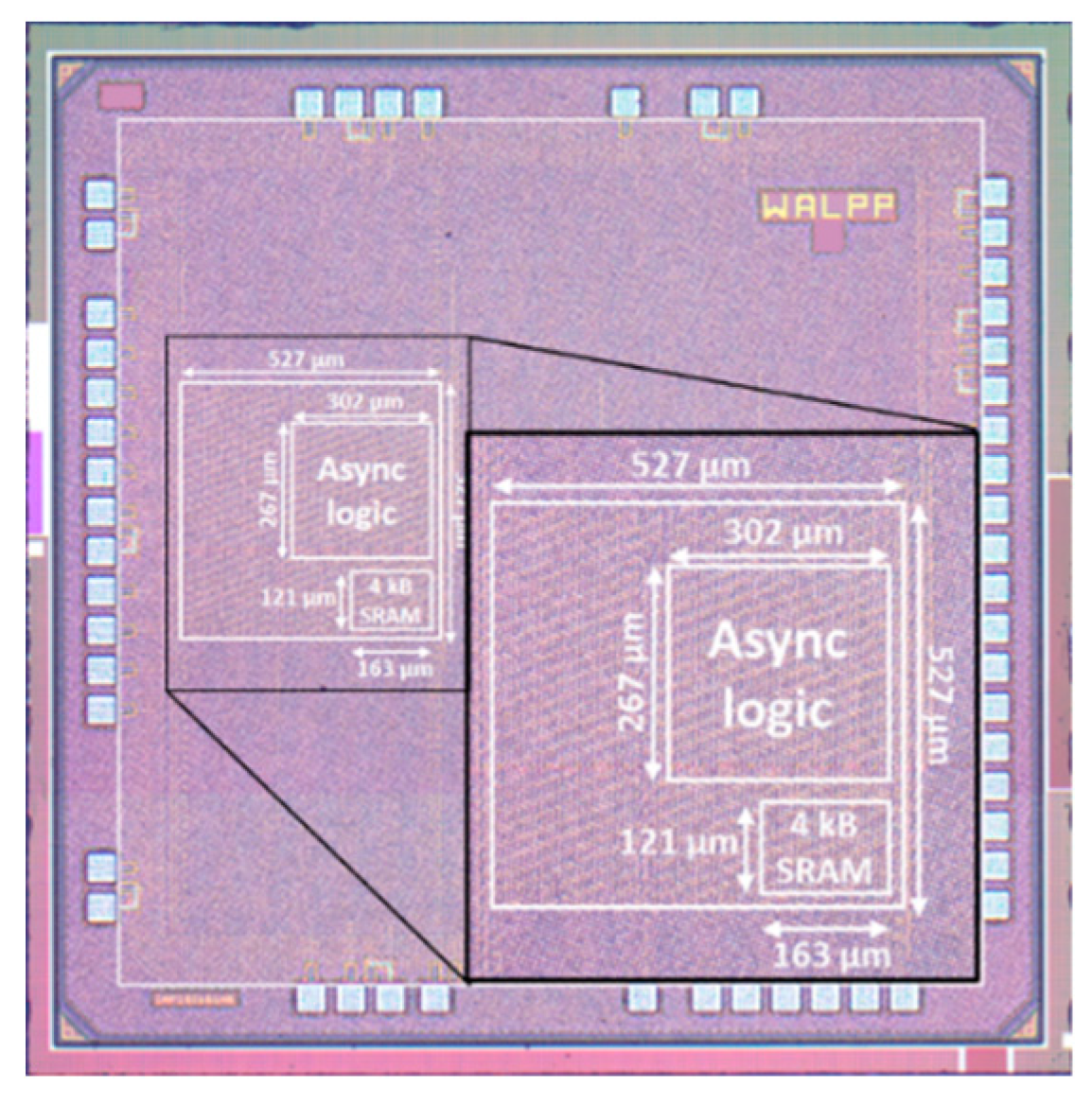
2.1. Asynchronous Wake up Controller Architecture
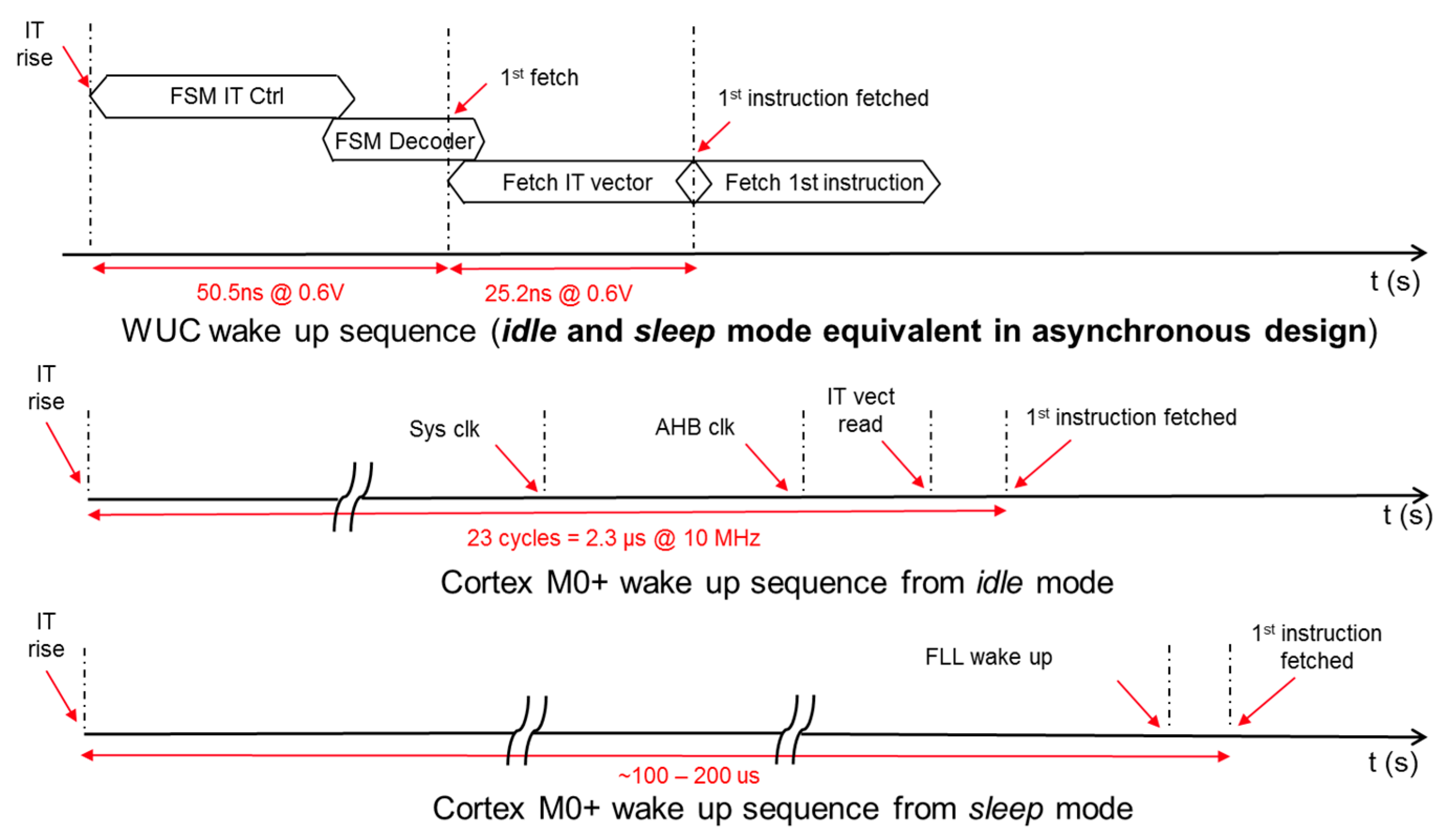
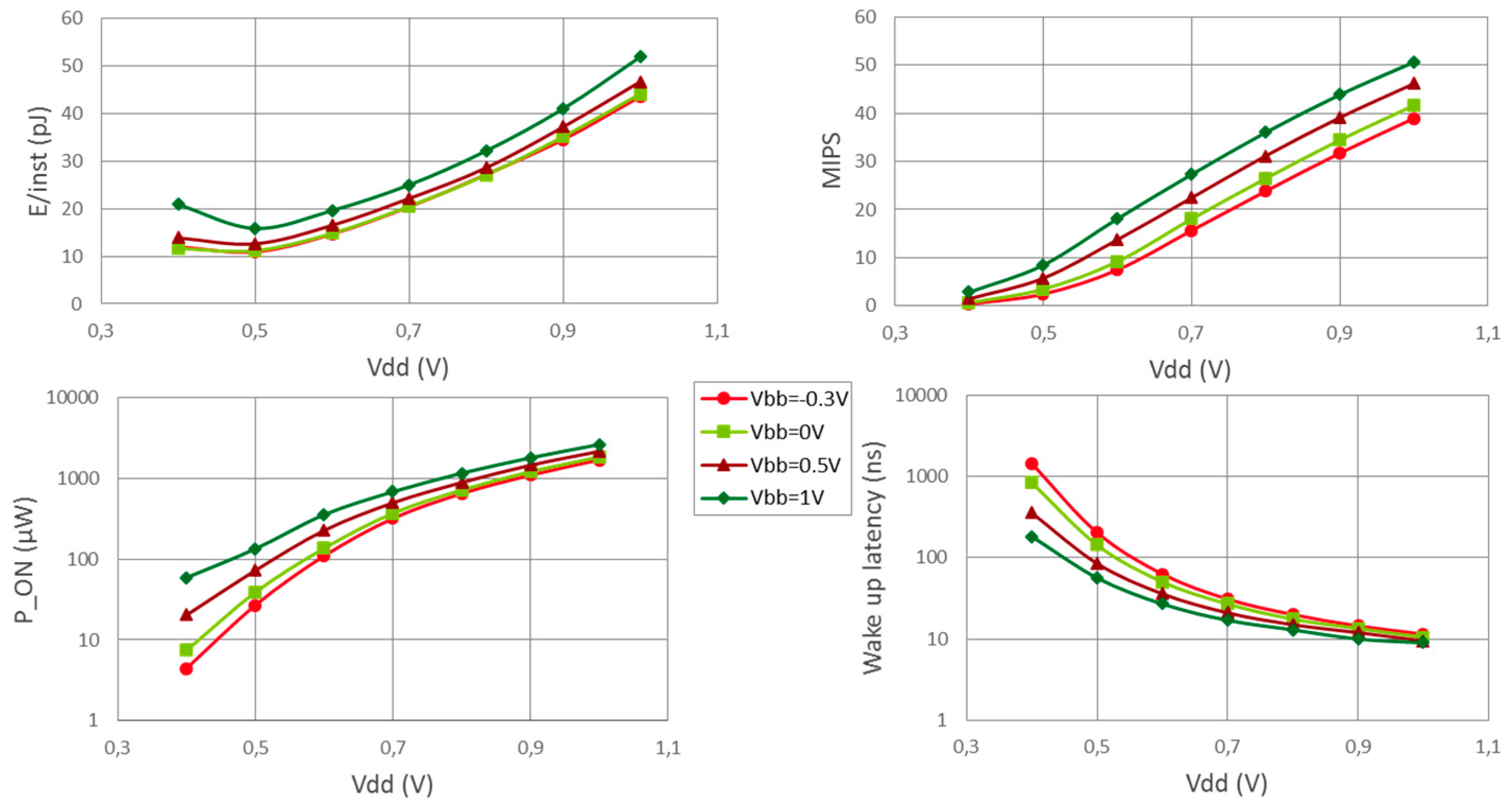
2.2. Measurement Results
3. Discussion
4. Materials and Methods
- 12 tracks Standard Cells implemented with Low Threshold Voltage transistors.
- Standard digital I/O cells supplied with 1.8 V external power supply.
- Bitcells from the Bitcell Reference Library
- RTL description of the whole circuit. For the asynchronous part, similar description exists and describes asynchronous token transfers through communication channels [12].
- Logical synthesis has been performed, using ACC for the asynchronous part [12] and using Design Compiler from Synopsys for the rest of the chip. The asynchronous logical synthesis, which was performed by ACC, consists of the following:
- Deriving the rules for data events (also known as tokens) generation from the provided asynchronous-specific HDL description;
- Implementing the netlist of gates which satisfy these rules;
- Locating the isochronic forks and performing a timing analysis to generate a set of minimum and maximum delay constraints between gates inputs and outputs which satisfies the isochronic fork assumption [8].
- Physical Implementation was realized with SoC Encounter from Cadence. (a specific add-on has been provided by STMicroelectronics for implementation optimization for FDSOI 28 nm). Regarding the implementation of the asynchronous parts, the timing constraints issued from synthesis were used to optimize, place and route the gates netlist in order to ensure the correct operation of the asynchronous design.
- Physical verification and signoff have been done with Calibre from Mentor Graphics.
Author Contributions
Funding
Conflicts of Interest
References
- Myers, J.; Savanth, A.; Howard, D.; Gaddh, R.; Prabhat, P.; Flynn, D. An 80nW retention 11.7pj/cycle active subthreshold ARM cortex-M0+ subsystem in 65nm CMOS for WSN applications. In Proceedings of the 2015 IEEE International Solid-State Circuits Conference—(ISSCC) Digest of Technical Papers, San Francisco, CA, USA, 22–26 February 2015. [Google Scholar]
- Hayashikoshi, M.; Sato, Y.; Ueki, H.; Kawai, H.; Shimizu, T. Normally-off MCU architecture for low-power sensor node. In Proceedings of the 2014 IEEE 19th Asia and South Pacific Design Automation Conference (ASP-DAC), Singapore, 20–23 January 2014. [Google Scholar]
- Zhu, Y.; Reddi, V.J. High-performance and energy-efficient mobile web browsing on big/little systems. In Proceedings of the 2013 IEEE 19th International Symposium on High Performance Computer Architecture (HPCA), Shenzhen, China, 23–27 February 2013. [Google Scholar]
- Otero, C.T.O.; Tse, J.; Karmazin, R.; Hill, B.; Manohar, R. ULSNAP: An ultra-low power event-driven microcontroller for sensor network nodes. In Proceedings of the Fifteenth International Symposium on Quality Electronic Design, Santa Clara, CA, USA, 3–5 March 2014. [Google Scholar]
- TI CC2650 SimpleLink Multistandard Wireless MCU. Available online: http://www.ti.com/lit/ds/symlink/cc2650.pdf (accessed on 30 November 2018).
- Piyare, R.; Murphy, A.L.; Kiraly, C.; Tosato, P.; Brunelli, D. Ultra Low Power Wake-Up Radios: A hardware and Networking Survey. IEEE Commun. Surv. Tutor. 2017, 19, 2117–2157. [Google Scholar] [CrossRef]
- Martin, A.J.; Nystrom, M. Asynchronous Techniques for System-on-Chip Design. Proc. IEEE 2006, 94, 1089–1120. [Google Scholar] [CrossRef]
- Nowick, S.M.; Singh, M. Asynchronous Design—Part 1: Overview and Recent Advances. IEEE Des. Test 2015, 32, 5–18. [Google Scholar] [CrossRef]
- Beigne, E.; Vivet, P.; Thonnart, Y.; Christmann, J.F.; Clermidy, F. Asynchronous Circuit Designs for the Internet of Everything: A Methodology for ultralow-Power Circuits with GALS Architecture. IEEE Solid State Circuits Mag. 2016, 8, 39–47. [Google Scholar] [CrossRef]
- Myers, J.; Savanth, A.; Prabhat, P.; Yang, S.; Gaddh, R.; Toh, S.O.; Flynn, D. A 12.4pJ/cycle sub-threshold, 16pJ/cycle near-threshold ARM Cortex-M0+ MCU with autonomous SRPG/DVFS and temperature tracking clocks. In Proceedings of the 2017 Symposium on VLSI Circuits, Kyoto, Japan, 5–8 June 2017. [Google Scholar]
- Paul, S.; Honkote, V.; Kim, R.; Majumder, T.; Aseron, P.; Grossnickle, V.; Sankman, R.; Mallik, D.; Jain, S.; Vangal, S.; et al. An energy harvesting wireless sensor node for IoT systems featuring a near-threshold voltage IA-32 microcontroller in 14nm tri-gate CMOS. In Proceedings of the 2016 IEEE Symposium on VLSI Circuits (VLSI-Circuits), Honolulu, HI, USA, 15–17 June 2016. [Google Scholar]
- Renaudin, M.; Fonkoua, A. Tiempo Asynchronous Circuits System Verilog Modeling Language. In Proceedings of the 2012 IEEE 18th International Symposium on Asynchronous Circuits and Systems, Lyngby, Denmark, 7–9 May 2012. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WuC (This work) | VLSI 2016 [8] | VLSI 2017 [7] | TI CC2650 [5] | |
|---|---|---|---|---|
| Process | FDSOI 28nm LVT | 14nm Tri Gate CMOS | 65nm CMOS | - |
| Core Vdd Range | 0.4–1V | 0.308–1V | 0.3–1.2V | - |
| Logic Type | Asynchronous | Synchronous | Synchronous | Synchronous |
| CPU | 16-bit RISC | 32-bit Intel Architecture | 32-bit ARM Cortex M0+ | ARM Cortex M3 ARM Cortex M0 Sensor Ctrl 16 bits |
| Data path | 32 bits | 32 bits | 32 bits | Sensor Controller 16 bits |
| Memory | 4 KB LVT SRAM | 16KB Boot ROM 64KB SRAM 8KB DTCM 8KB I$ | 12KB LV RAM, RTC, PMU, GPIO, Debug, SPI, 128b AES, DMA, 2KB ROM, IVR, scan, BIST | Sensor Controller 2KB SRAM |
| Frequency Range | 3.5-50.6 MIPS | 500KHz–297MHz | 12kHz–60MHz | Sensor Ctrl 24MHz max |
| Idle power | 5.6 µW @ 0.5V | - | 120uW 4KB + CPU @ 46nW | 20KB SRAM + CPU + Sensor Ctrl + 2KB SRAM + RTC @ 1µA (retention) |
| Emin | 11.2pJ/inst@0.5V 4MIPS | 17pJ/cycle @ 0.37V, 3.5MHz 26pJ/cycle @ 0.6V, 100MHz | 6.3pJ @ 0.35V, 174kHz 12.44 pJ/cycle @ 0.6V, 10.5MHz | - |
| Wake Up Latency | 50.5 ns @ 9.7MIPS from Idle mode | ~µs from short sleep ~ ms from long sleep ~s from deepsleep | µs-ms | 151 µs from Standby Mode 1015 µs from Shutdown Mode |
| Power Modes | Run, Idle | No Sleep, Short Sleep, Long Sleep, Deep Sleep | Run, SRPG/DFVS, Retention, Sleep | Active, Idle, Stanby, Shutdown |
| Debug Unit | Yes | Yes | Yes | Yes |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Christmann, J.-F.; Berthier, F.; Coriat, D.; Miro-Panades, I.; Guthmuller, E.; Thuries, S.; Thonnart, Y.; Makosiej, A.; Debicki, O.; Heitzmann, F.; et al. A 50.5 ns Wake-Up-Latency 11.2 pJ/Inst Asynchronous Wake-Up Controller in FDSOI 28 nm. J. Low Power Electron. Appl. 2019, 9, 8. https://doi.org/10.3390/jlpea9010008
Christmann J-F, Berthier F, Coriat D, Miro-Panades I, Guthmuller E, Thuries S, Thonnart Y, Makosiej A, Debicki O, Heitzmann F, et al. A 50.5 ns Wake-Up-Latency 11.2 pJ/Inst Asynchronous Wake-Up Controller in FDSOI 28 nm. Journal of Low Power Electronics and Applications. 2019; 9(1):8. https://doi.org/10.3390/jlpea9010008
Chicago/Turabian StyleChristmann, Jean-Frédéric, Florent Berthier, David Coriat, Ivan Miro-Panades, Eric Guthmuller, Sébastien Thuries, Yvain Thonnart, Adam Makosiej, Olivier Debicki, Frédéric Heitzmann, and et al. 2019. "A 50.5 ns Wake-Up-Latency 11.2 pJ/Inst Asynchronous Wake-Up Controller in FDSOI 28 nm" Journal of Low Power Electronics and Applications 9, no. 1: 8. https://doi.org/10.3390/jlpea9010008
APA StyleChristmann, J.-F., Berthier, F., Coriat, D., Miro-Panades, I., Guthmuller, E., Thuries, S., Thonnart, Y., Makosiej, A., Debicki, O., Heitzmann, F., Valentian, A., Vivet, P., & Beigné, E. (2019). A 50.5 ns Wake-Up-Latency 11.2 pJ/Inst Asynchronous Wake-Up Controller in FDSOI 28 nm. Journal of Low Power Electronics and Applications, 9(1), 8. https://doi.org/10.3390/jlpea9010008