High Level Current Modeling for Shaping Electromagnetic Emissions in Micropipeline Circuits


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Related Works
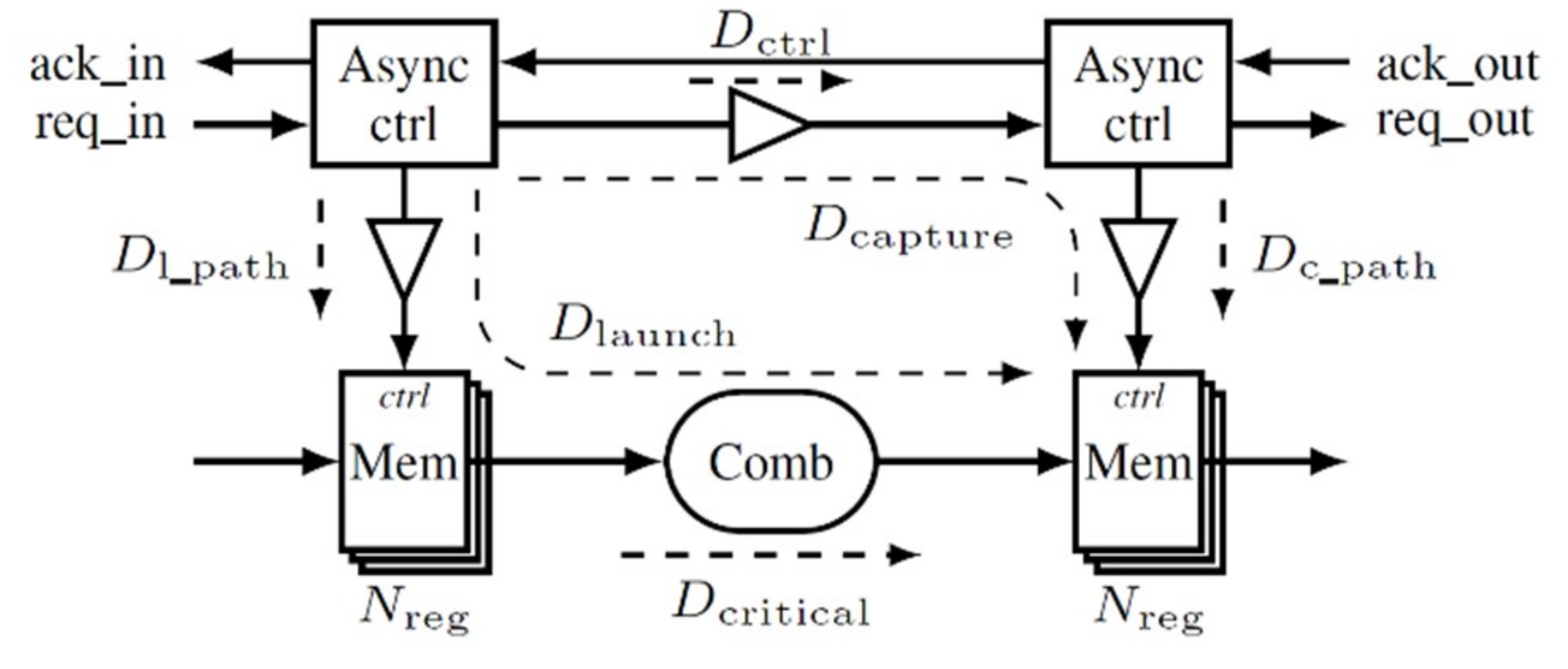
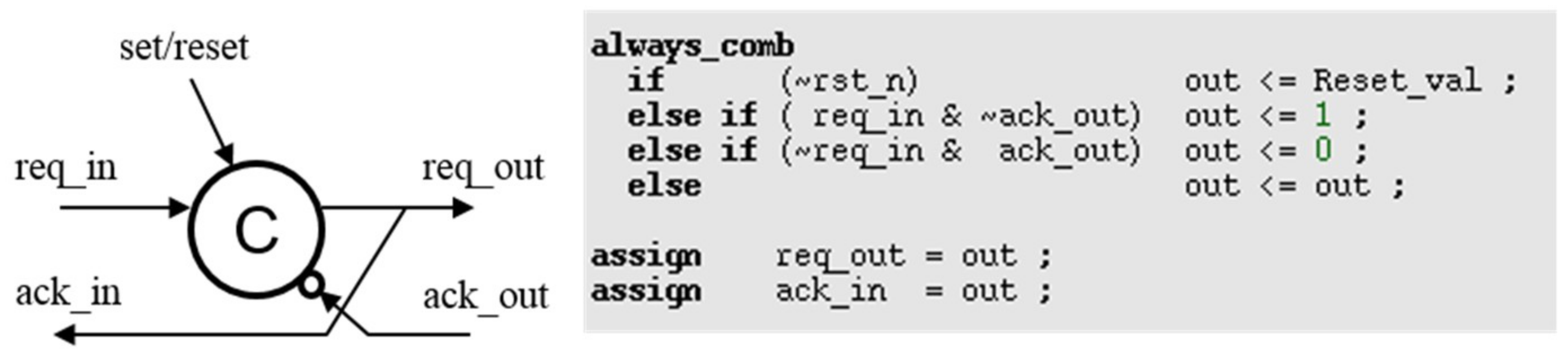
3. Micropipeline Circuits
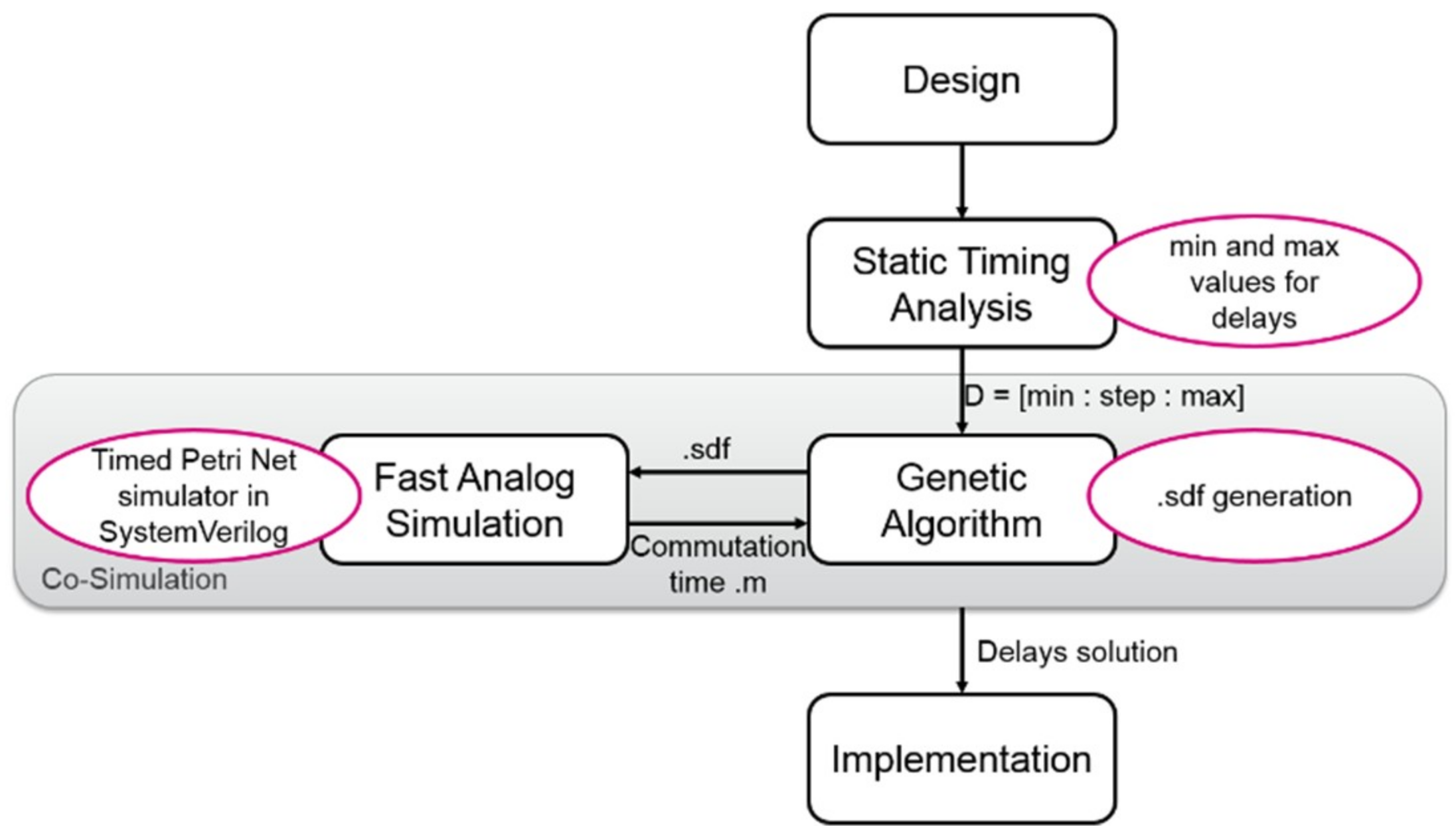
4. Design Flow
4.1. Timing Extraction
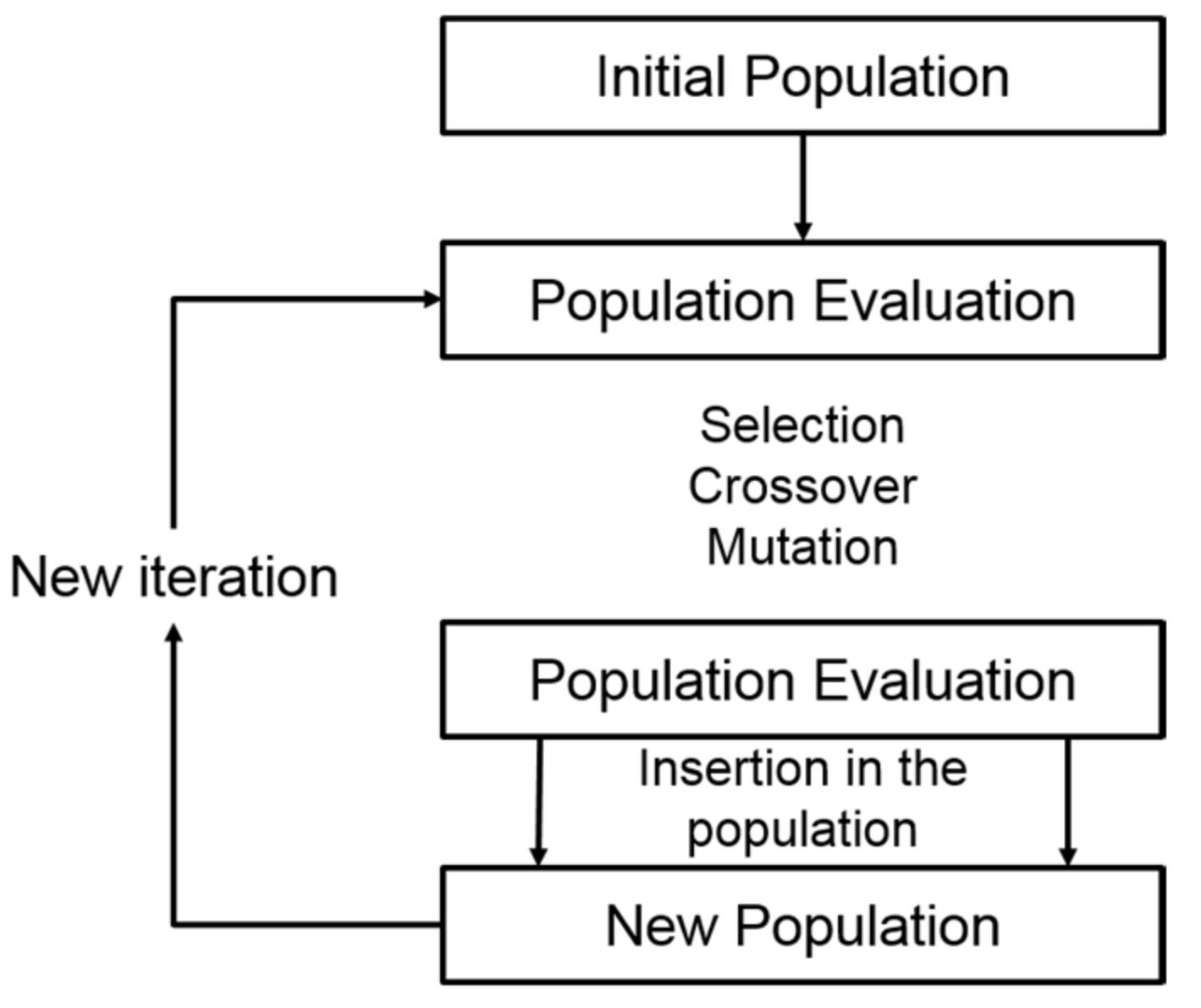
4.2. Genetic Algorithm
4.3. Co-Simulation between the Genetic Algorithm and the Timed Petri Net Model
5. High Level Current Modeling
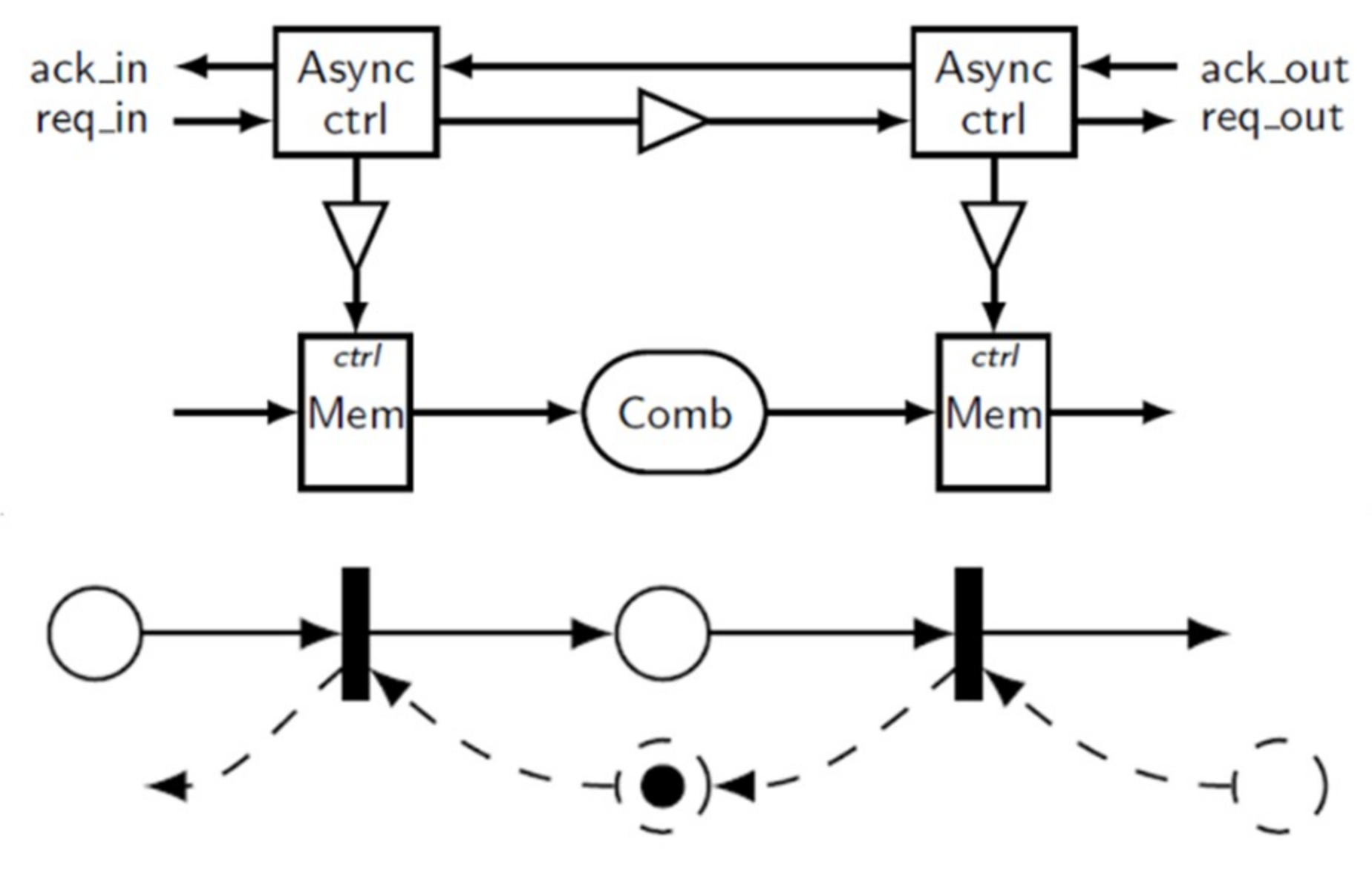
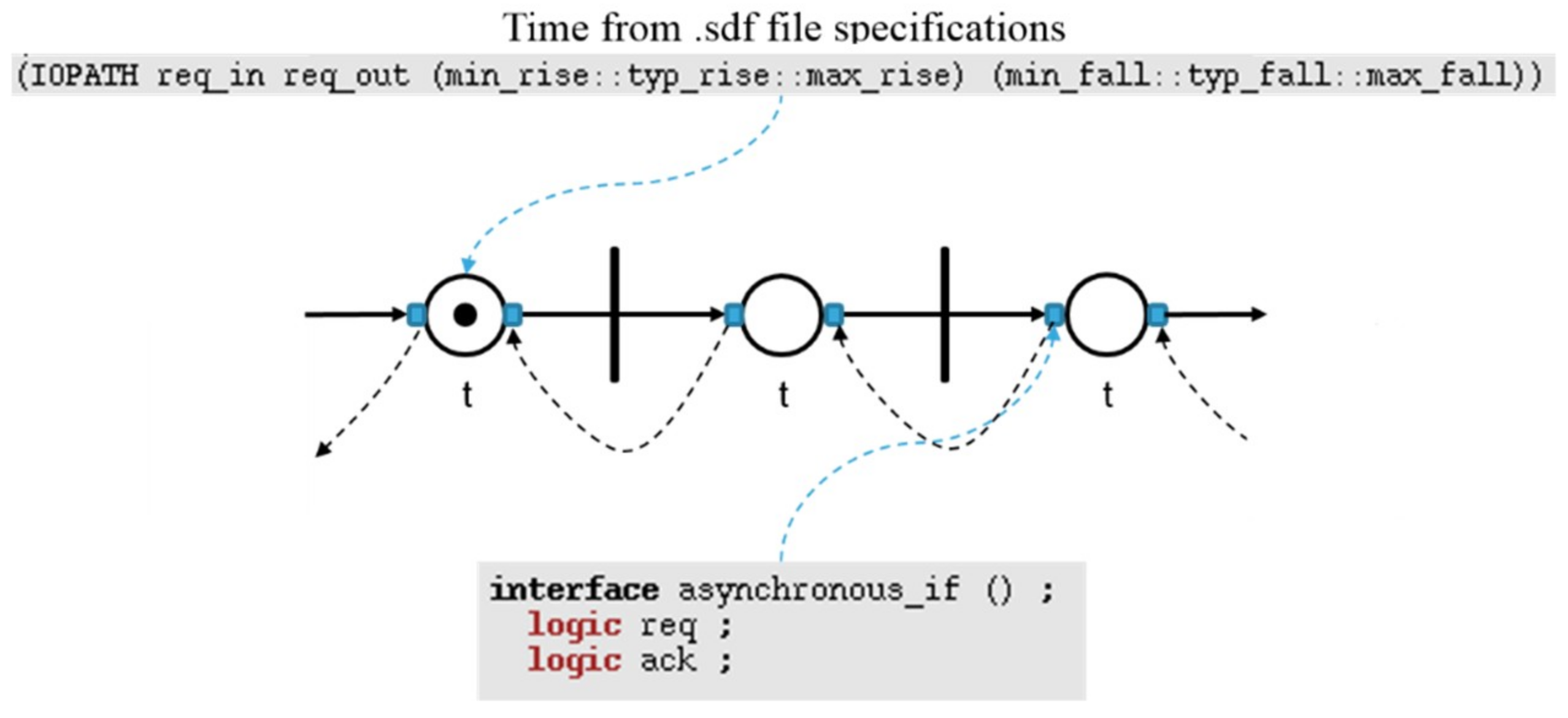
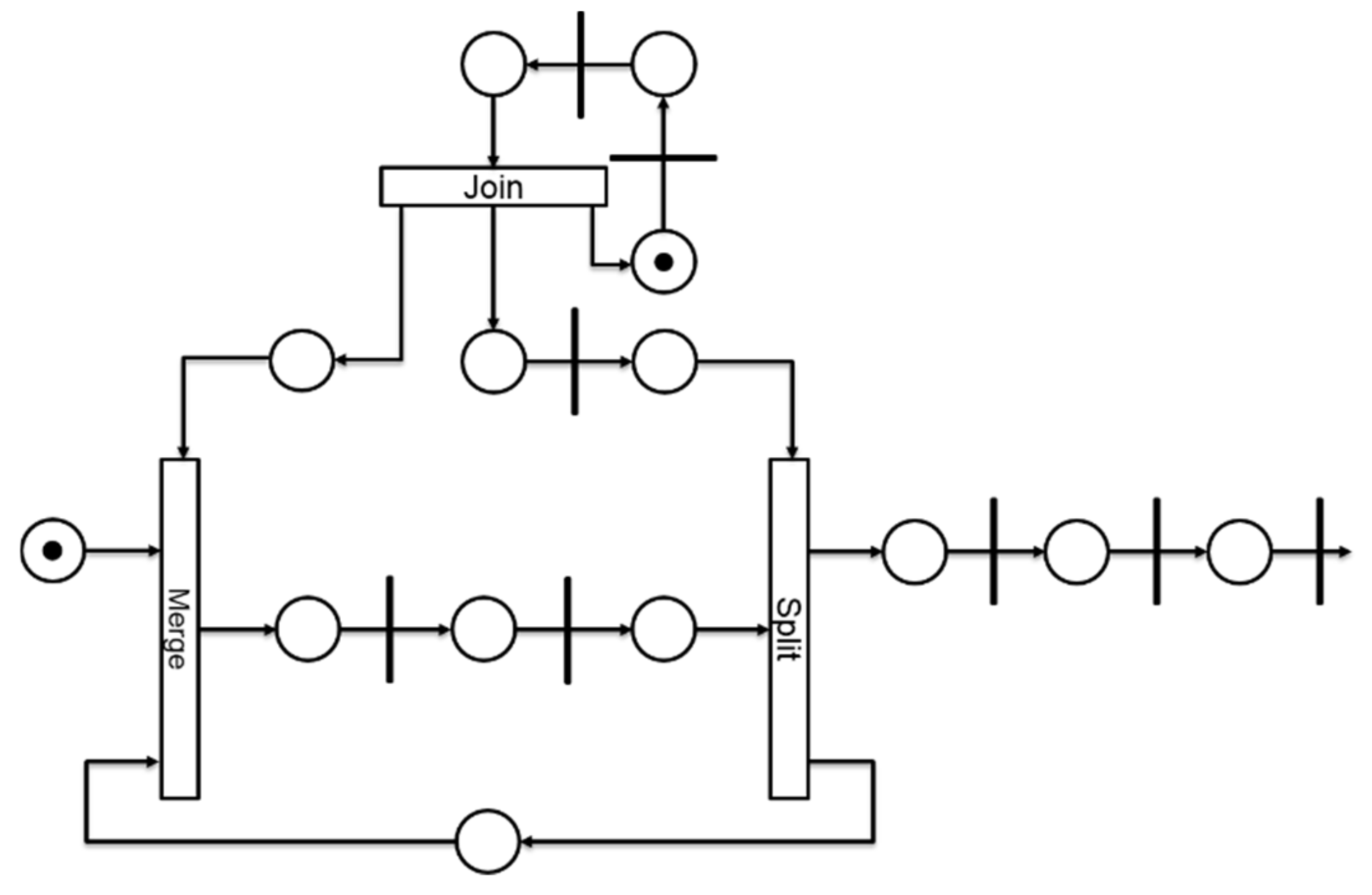
5.1. Timed Petri Net Model
- All the inputs of the transition must have at least one token;
- The time specified in its input places has already expired;
- All the outputs of the transition must be token-free.
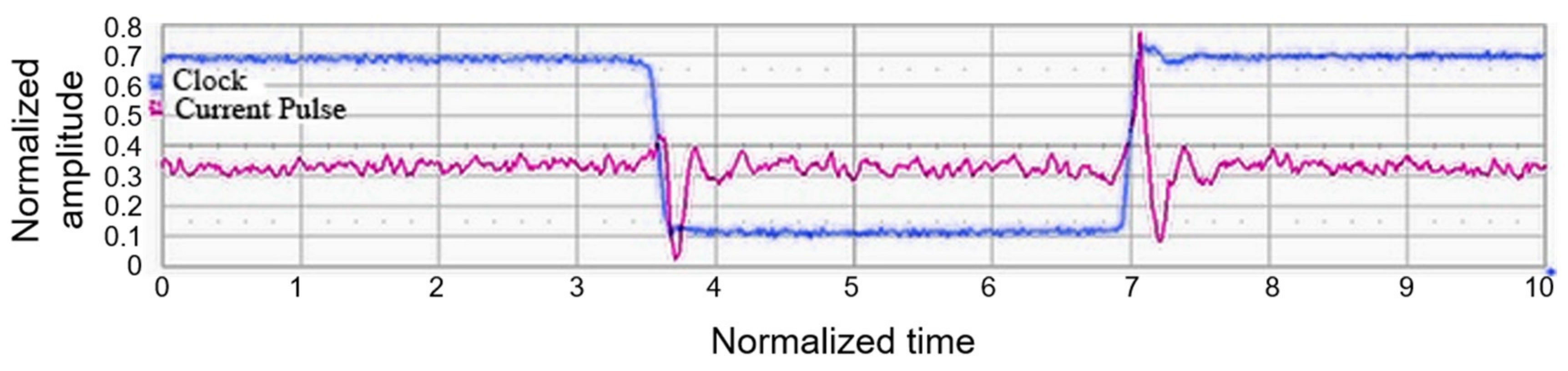
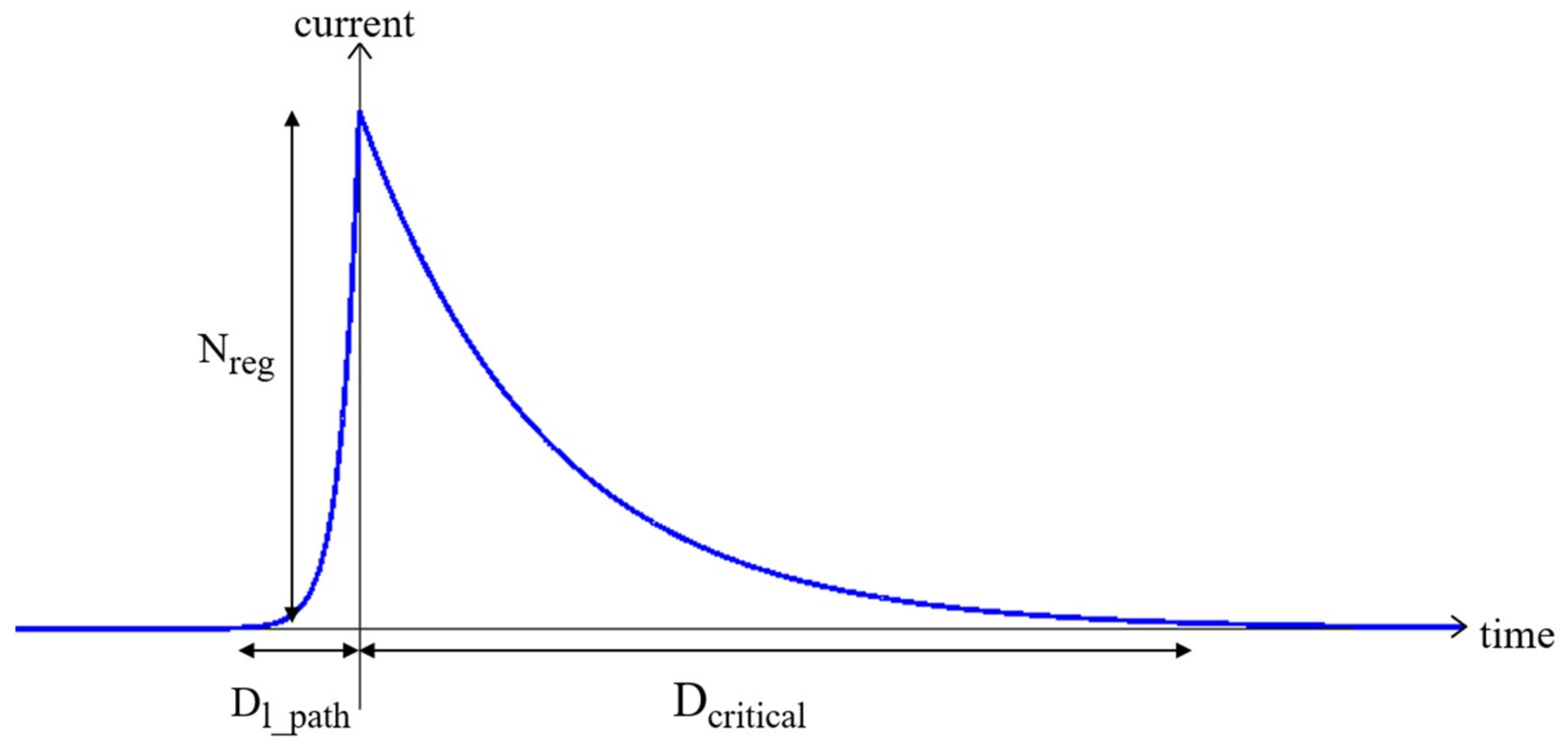
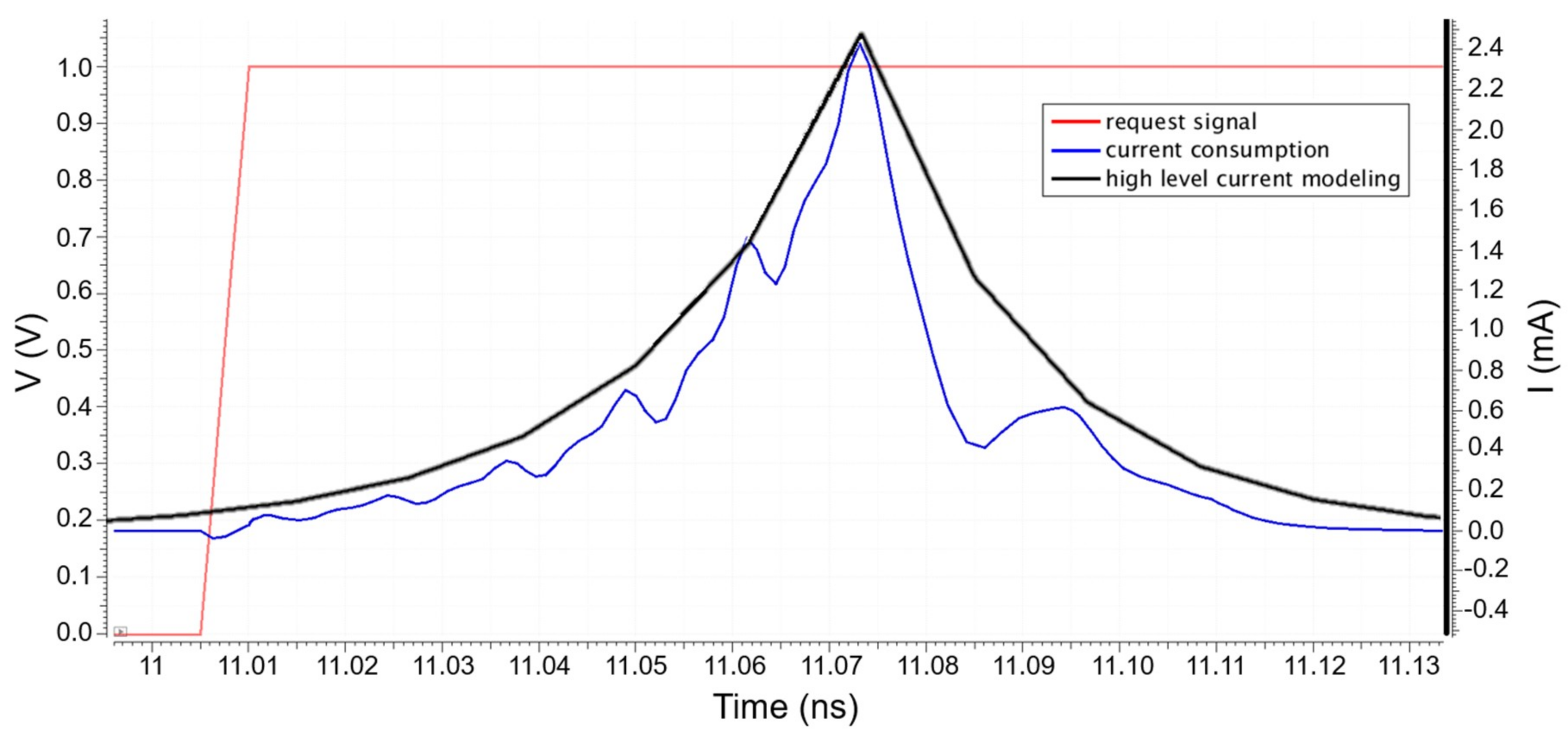
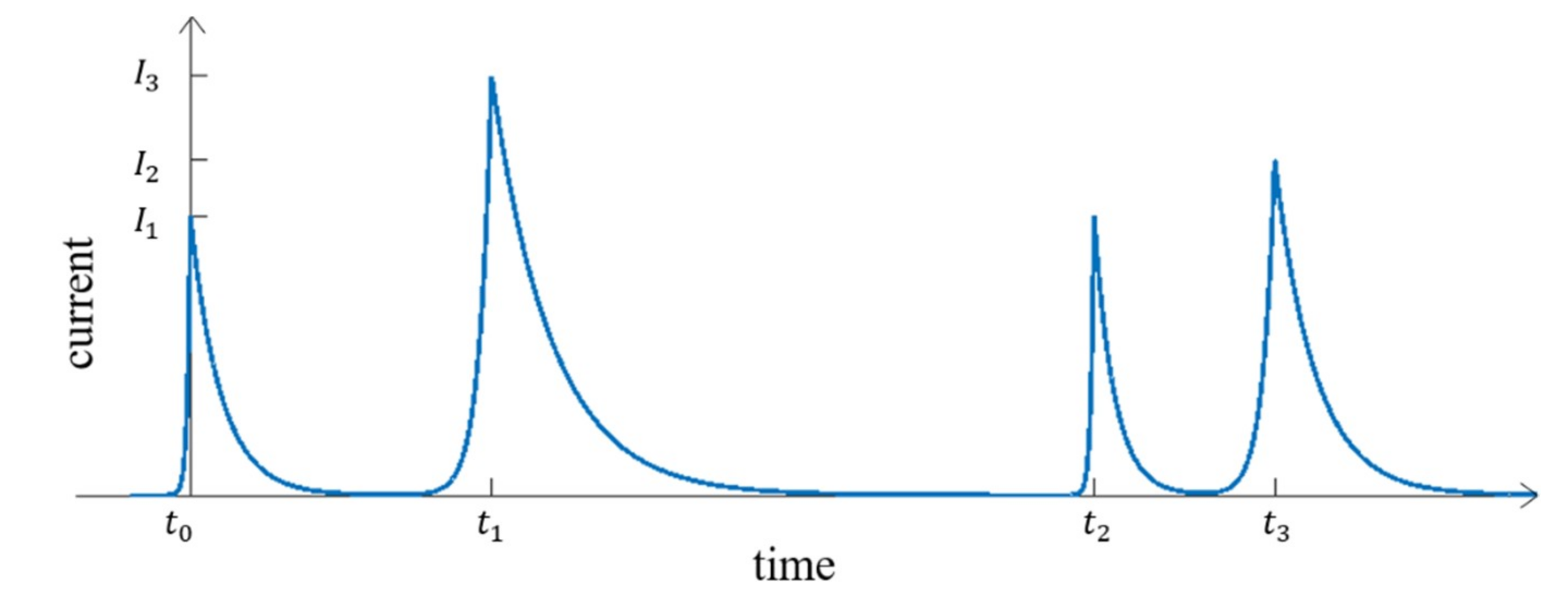
5.2. Current Estimation
- In CMOS circuits, the gate switching produces the current consumption.
- Most of the gate switching activity is localized in time just after the clock edges.
- The clock switching activity of the flip-flops and the clock tree produce an important part of the current consumption.
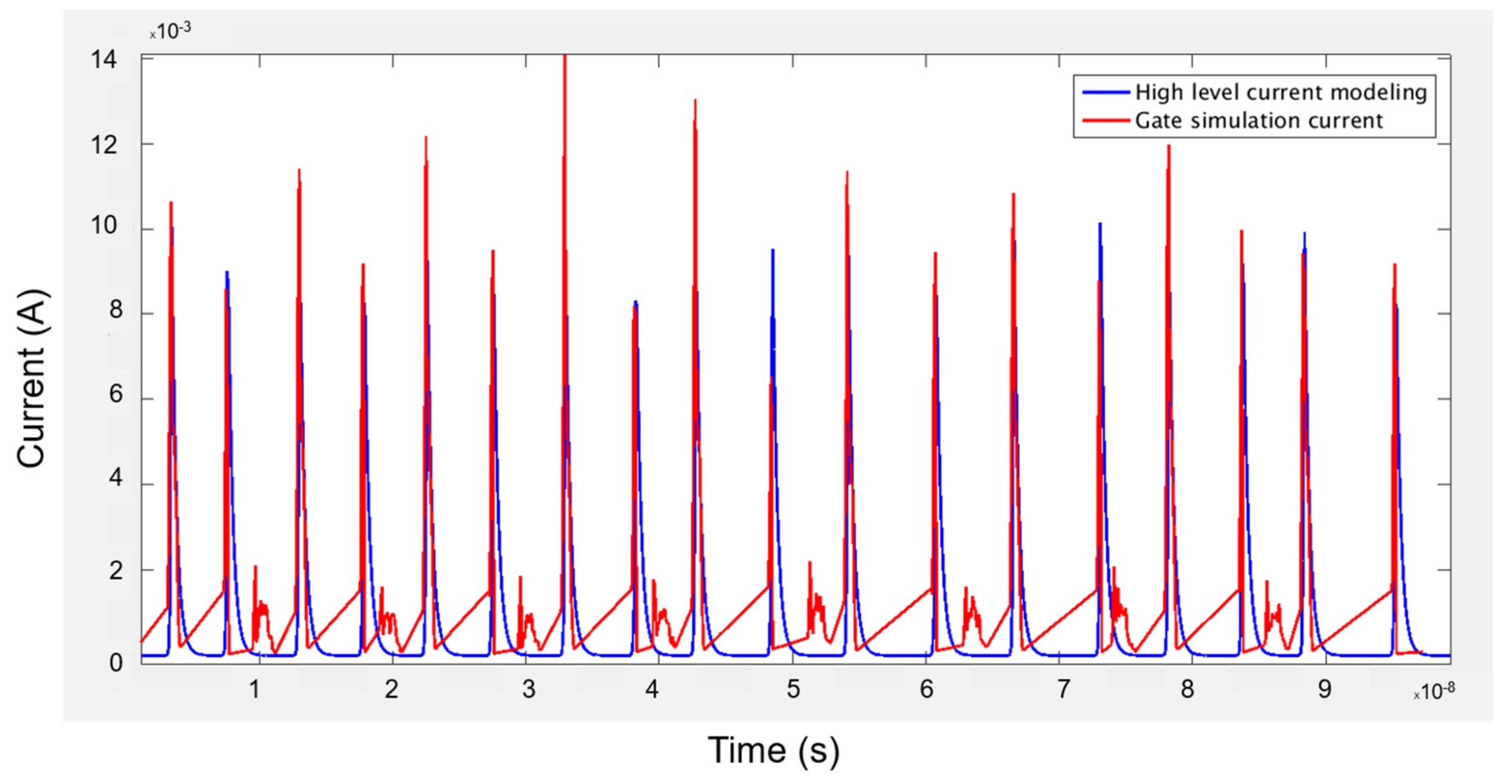
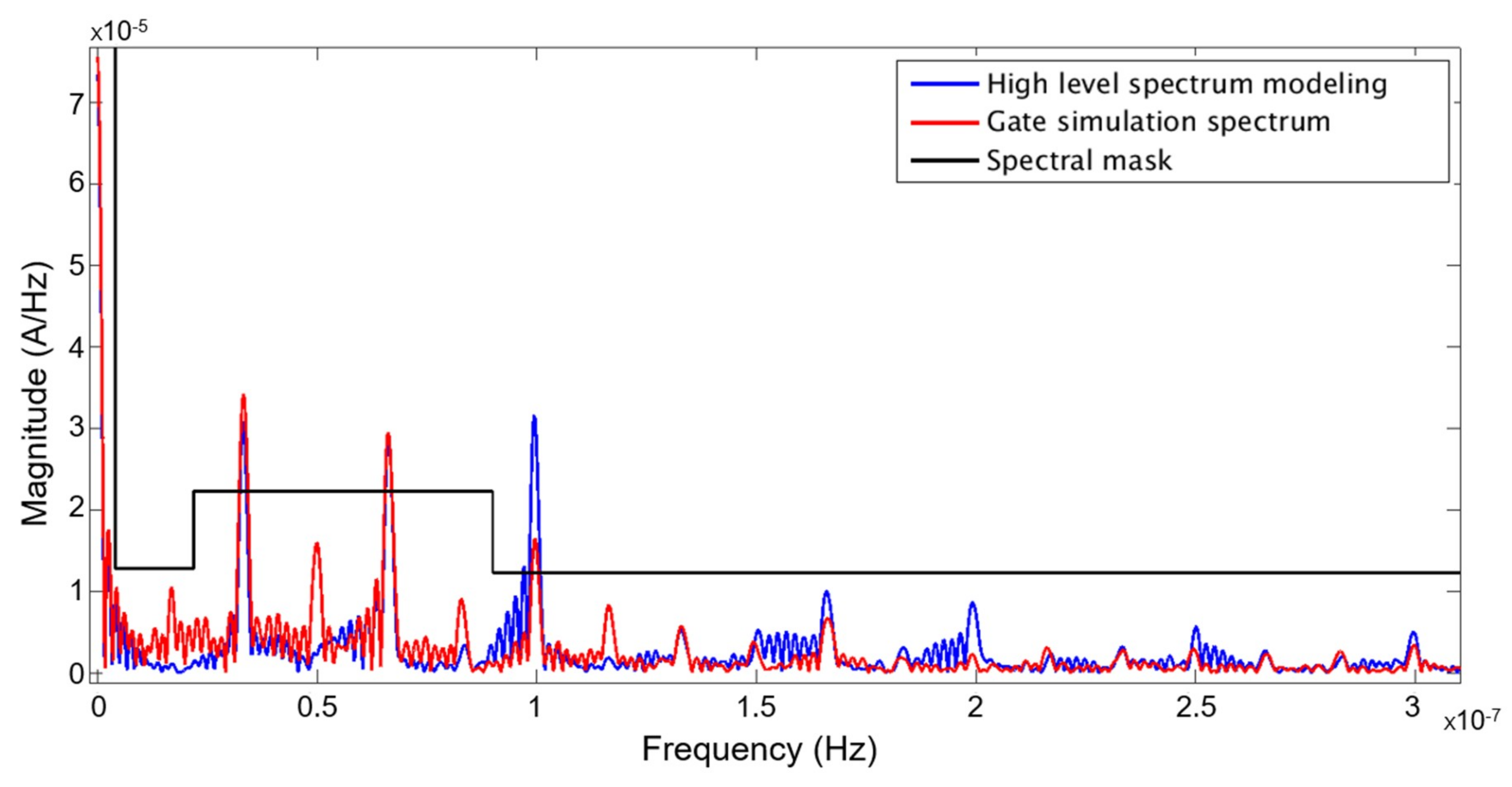
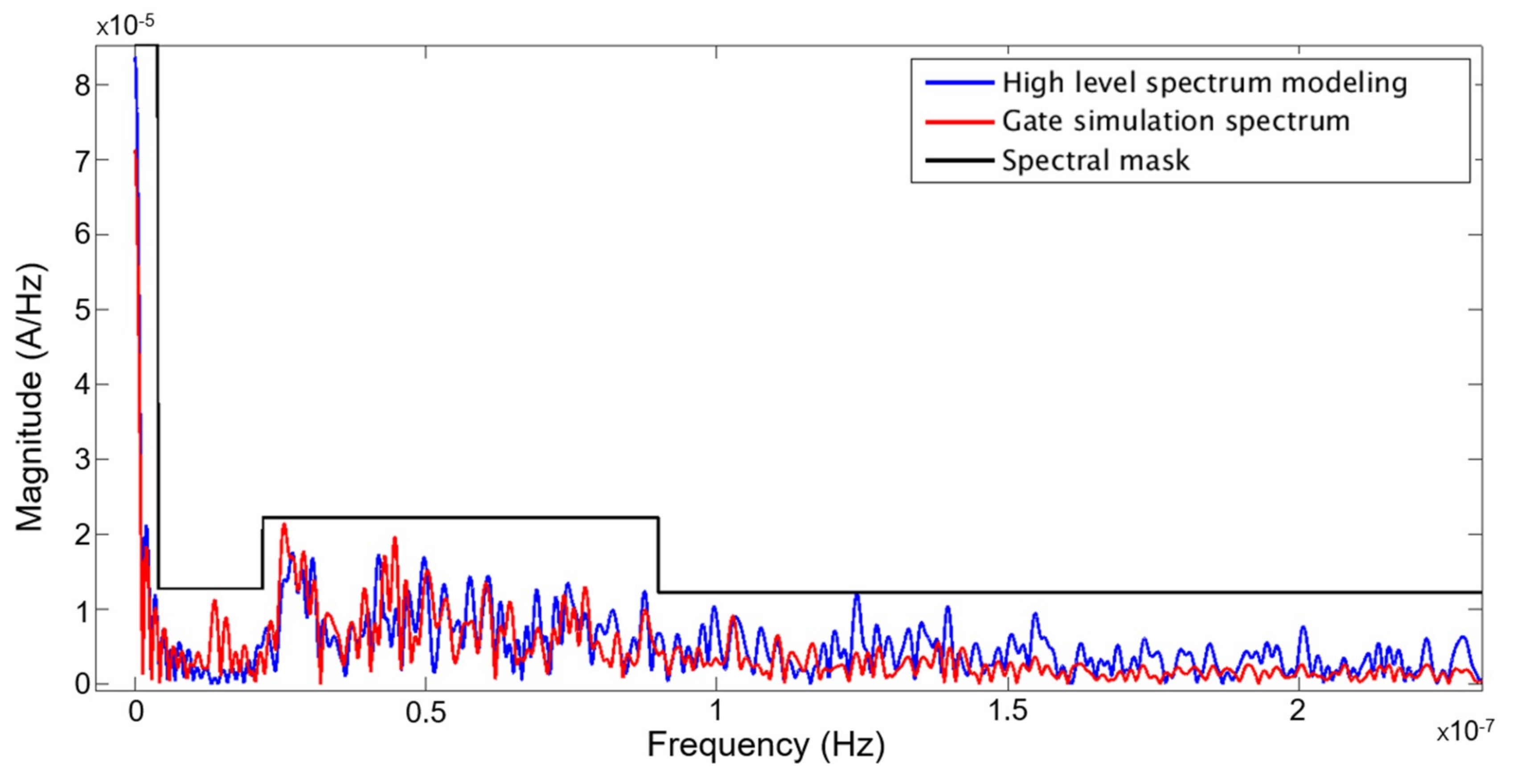
6. Simulation Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hung, C.M.; Muhammad, K. RF/Analog and Digital Faceoff-Friends or Enemies in an RF SoC. In Proceedings of the 2010 International Symposium on VLSI Technology Systems and Applications (VLSI-TSA), Hsin Chu, Taiwan, 26–28 April 2010; pp. 19–20. [Google Scholar]
- Cazzaniga, M.; Doriol, P.J.; Sanna, A.; Blanc, E.; Liberali, V.; Pandini, D. Evaluating the impact of substrate noise on conducted EMI in automotive microcontrollers. In Proceedings of the 9th International Workshop on,Electromagnetic Compatibility of Integrated Circuits (EMC Compo), Nara, Japan, 15–18 December 2013; pp. 129–133. [Google Scholar]
- Ramdani, M.; Sicard, E.; Boyer, A.; Dhia, S.B.; Whalen, J.J.; Hubing, T.H.; Coenen, M.; Wada, O. The Electromagnetic Compatibility of Integrated Circuits—Past, Present, and Future. IEEE Trans. Electromagn. Compat. 2009, 51, 78–100. [Google Scholar] [CrossRef]
- Rossi, R.; Torelli, G.; Liberali, V. Model and verification of triple-well shielding on substrate noise in mixed-signal CMOS ICs. In Proceedings of the ESSCIRC 2004—29th European Solid-State Circuits Conference (IEEE Cat. No.03EX705), Estoril, Portugal, 16–18 September 2003; pp. 643–646. [Google Scholar]
- Schneider, M.J. Design Considerations to Reduce Conducted and Radiated EMI. Master’s Thesis, Purdue University, West Lafayette, IN, USA, April 2010. [Google Scholar]
- Mardiguian, M. Controlling Radiated Emissions by Design, 3rd ed.; Kluwer Academic Publishers: Norwell, Massachusetts, 2014. [Google Scholar]
- Steinecke, T. Design-in for EMC on CMOS large-scale integrated circuits. In Proceedings of the IEEE EMC International Symposium Electromagnetic Compatibility, Montreal, QC, Canada, 13–17 August 2001; pp. 910–915. [Google Scholar]
- Hardin, K.B.; Fessler, J.T.; Bush, D.R. Spread spectrum clock generation for the reduction of radiated emissions. In Proceedings of the IEEE Symposium on Electromagnetic Compatibility, Sendai, Japan, 27–29 September 1994; pp. 227–231. [Google Scholar]
- Fan, X.; Schrape, O.; Marinkovic, M.; Dahnert, P.; Krstic, M.; Grass, E. GALS Design for Spectral Peak Attenuation of Switching Current. In Proceedings of the IEEE 19th International Symposium on Asynchronous Circuits and Systems, Santa Monica, CA, USA, 19–22 May 2013; pp. 83–90. [Google Scholar]
- Fan, X.; Stegmann, M.B.; Schrape, O.; Zeidler, S.; Jensen, I.G.; Thorsen, J.; Bjerregaard, T.; Krstić, M. Frequency-Domain Optimization of Digital Switching Noise Based on Clock Scheduling. IEEE Trans. Circuits Syst. Regul. Pap. 2016, 63, 982–993. [Google Scholar] [CrossRef]
- Stegmann, G.; Gloor, D.; Baumann, D.; Peeters, A.; van Berkel, K.; van Gageldonk, H. An asynchronous low-power 80C51 microcontroller. In Proceedings of the 1998 Fourth International Symposium on Advanced Research in Asynchronous Circuits and Systems, San Diego, CA, USA, 30 March–2 April 1998; pp. 96–107. [Google Scholar]
- Berkel, K.V.; Josephs, M.B.; Nowick, S.M. Scanning the technology: Applications of asynchronous circuits. Proc IEEE 1999, 223–233. [Google Scholar]
- de Cristo, R.A.L.; Jasinski, R.P.; Pedroni, V.A. Analysis and Preliminary Measurements of Radiated Emissions in an Asynchronous Circuit versus its Synchronous Counterpart. In Proceedings of the International Conference on Reconfigurable Computing and FPGAs, Cancun, Mexico, 13–15 December 2010; pp. 127–131. [Google Scholar]
- Furber, S.B.; Garside, J.D.; Riocreux, P.; Temple, S.; Day, P.; Liu, J.; Paver, N.C. AMULET2e: An asynchronous embedded controller. Proc. IEEE 1999, 87, 243–256. [Google Scholar] [CrossRef]
- Bouesse, G.F.; Ninon, N.; Sicard, G.; Renaudin, M.; Boyer, A.; Sicard, E. Asynchronous logic VS Synchronous logic: Concrete results on electromagnetic emissions and conducted susceptibility. In Proceedings of the 6th International Workshop on Electromagnetic Compatibility of Integrated Circuits, Torino, Italy, 28–30 November 2007; pp. 99–102. [Google Scholar]
- Panyasak, D.; Sicard, G.; Renaudin, M. A current shaping methodology for lowering EM disturbances in asynchronous circuits. Microelectron. J. 2004, 35, 531–540. [Google Scholar] [CrossRef]
- Lee, J.G. A Low EMI Circuit Design with Asynchronous Multi-Frequency Clocking. IEICE Trans. Electron. 2014, 97, 1158–1161. [Google Scholar] [CrossRef]
- Federal Communication Commission. First Report and Order In the Matter of Revision of the Commission’s Rules Regarding Ultra-Wideband Transmission Systems; ET Docket 98-153, FCC 02-48; Federal Communication Commission: Washington, DC, USA, 2002.
- Sutherland, I.E. Micropipelines. Commun. ACM 1989, 32, 720–738. [Google Scholar] [CrossRef]
- Sparsø, J.; Furber, S. Principles of Asynchronous Circuit Design: A Systems Perspective; Kluwer: Boston, MA, USA, 2010. [Google Scholar]
- Germain, S.; Engels, S.; Fesquet, L. Event-based design strategy for circuit electromagnetic compatibility. In Proceedings of the 3rd International Conference on Event-Based Control, Communication and Signal Processing (EBCCSP), Madeira, Portugal, 24–26 May 2017; pp. 1–7. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Simatic, J.; Cherkaoui, A.; Bertrand, F.; Bastos, R.P.; Fesquet, L. A Practical Framework for Specification, Verification, and Design of Self-Timed Pipelines. In Proceedings of the 23rd IEEE International Symposium on Asynchronous Circuits and Systems (ASYNC), San Diego, CA, USA, 21–24 May 2017; pp. 65–72. [Google Scholar]
- Monteiro, J.; Devadas, S.; Ghosh, A.; Keutzer, K.; White, J. Estimation of average switching activity in combinational logic circuits using symbolic simulation. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 1997, 16, 121–127. [Google Scholar] [CrossRef]














© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Germain, S.; Engels, S.; Fesquet, L. High Level Current Modeling for Shaping Electromagnetic Emissions in Micropipeline Circuits. J. Low Power Electron. Appl. 2019, 9, 6. https://doi.org/10.3390/jlpea9010006
Germain S, Engels S, Fesquet L. High Level Current Modeling for Shaping Electromagnetic Emissions in Micropipeline Circuits. Journal of Low Power Electronics and Applications. 2019; 9(1):6. https://doi.org/10.3390/jlpea9010006
Chicago/Turabian StyleGermain, Sophie, Sylvain Engels, and Laurent Fesquet. 2019. "High Level Current Modeling for Shaping Electromagnetic Emissions in Micropipeline Circuits" Journal of Low Power Electronics and Applications 9, no. 1: 6. https://doi.org/10.3390/jlpea9010006
APA StyleGermain, S., Engels, S., & Fesquet, L. (2019). High Level Current Modeling for Shaping Electromagnetic Emissions in Micropipeline Circuits. Journal of Low Power Electronics and Applications, 9(1), 6. https://doi.org/10.3390/jlpea9010006