
Neural-Network-Based Ultrasonic Inspection of Offshore Coated Concrete Specimens

 ,
, 
 ,
,  ,
, 
Abstract
:1. Introduction
2. Theoretical Backgrounds
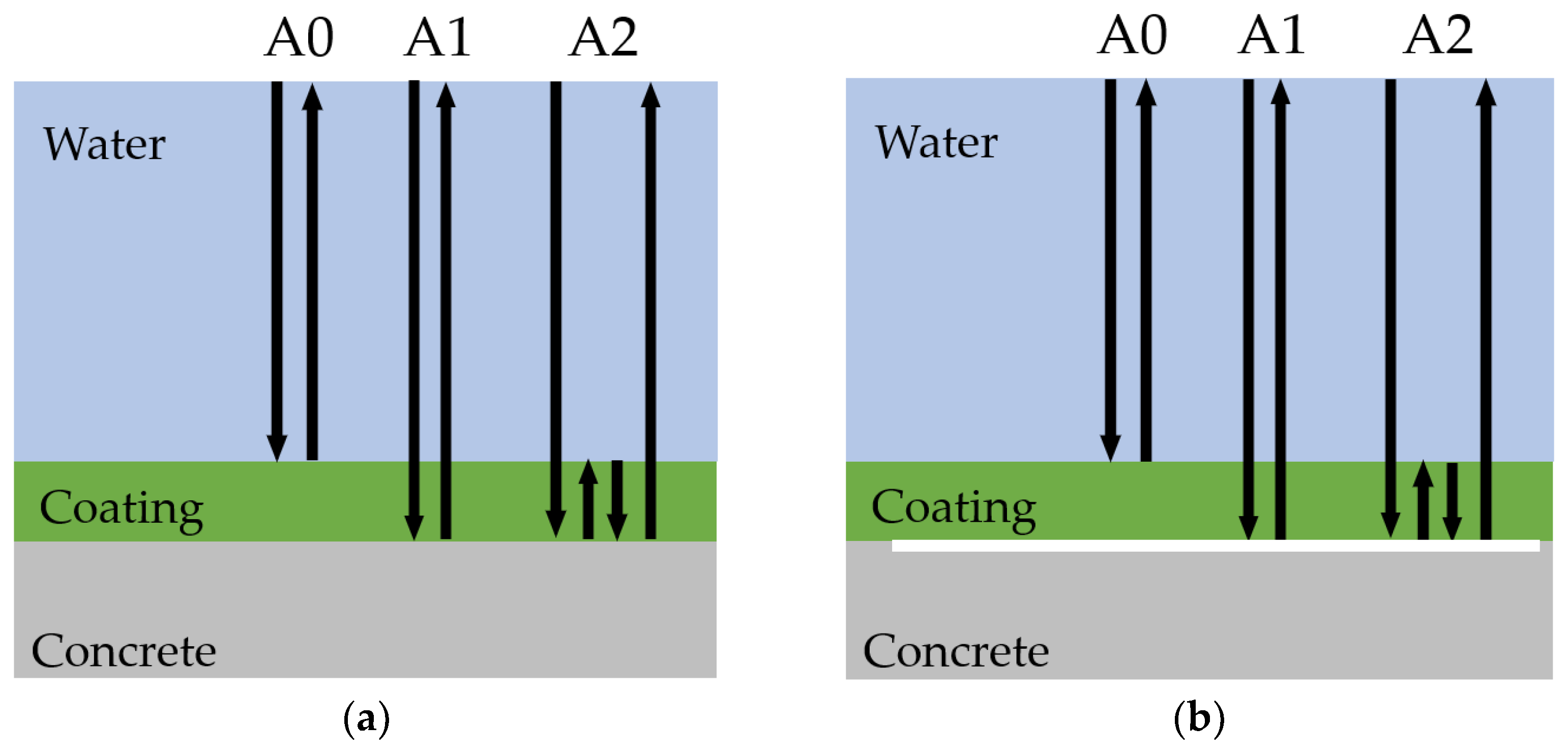
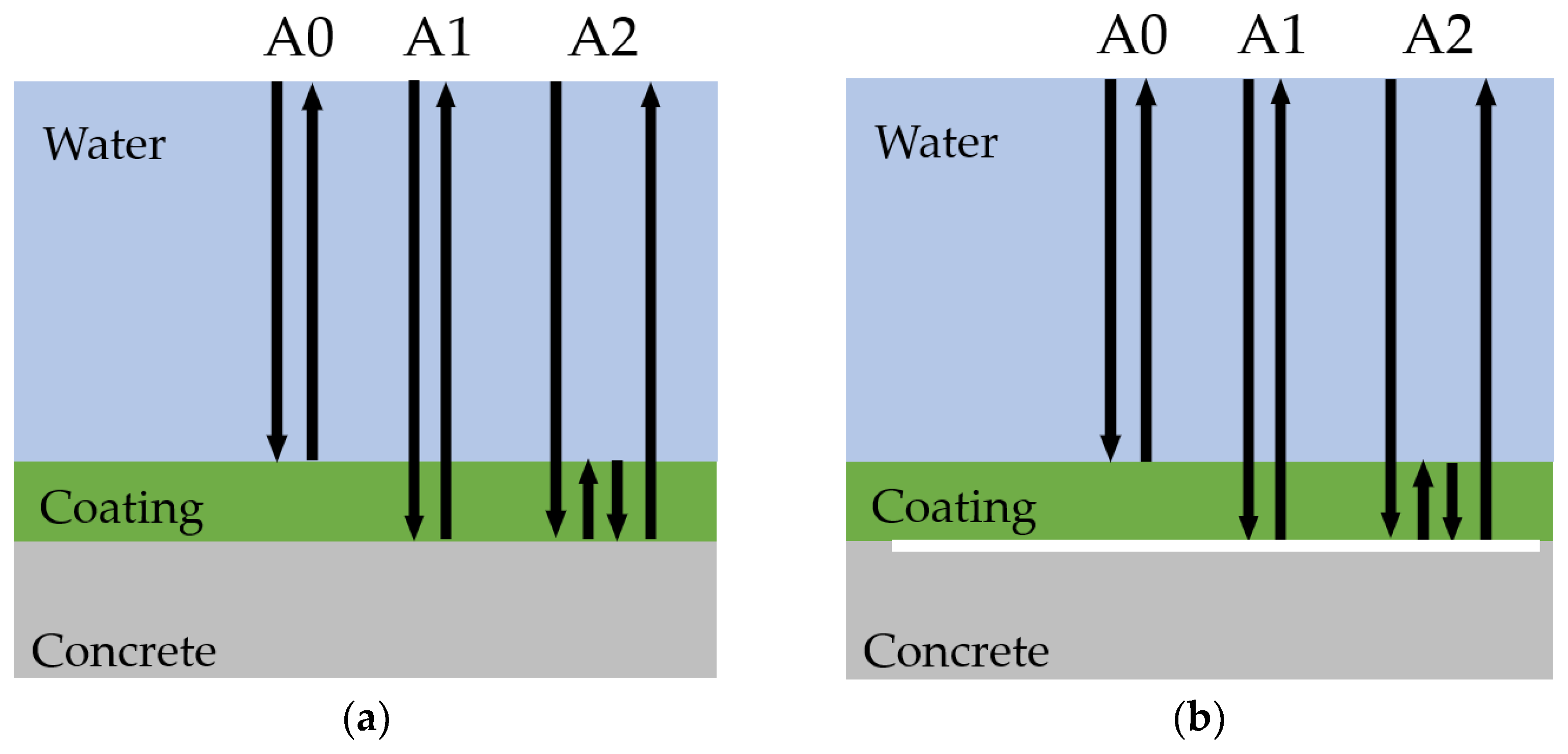
2.1. Coated Concrete Material
2.2. Continuous Wavelet Transform
2.3. Waveform Parameters
3. Experiments
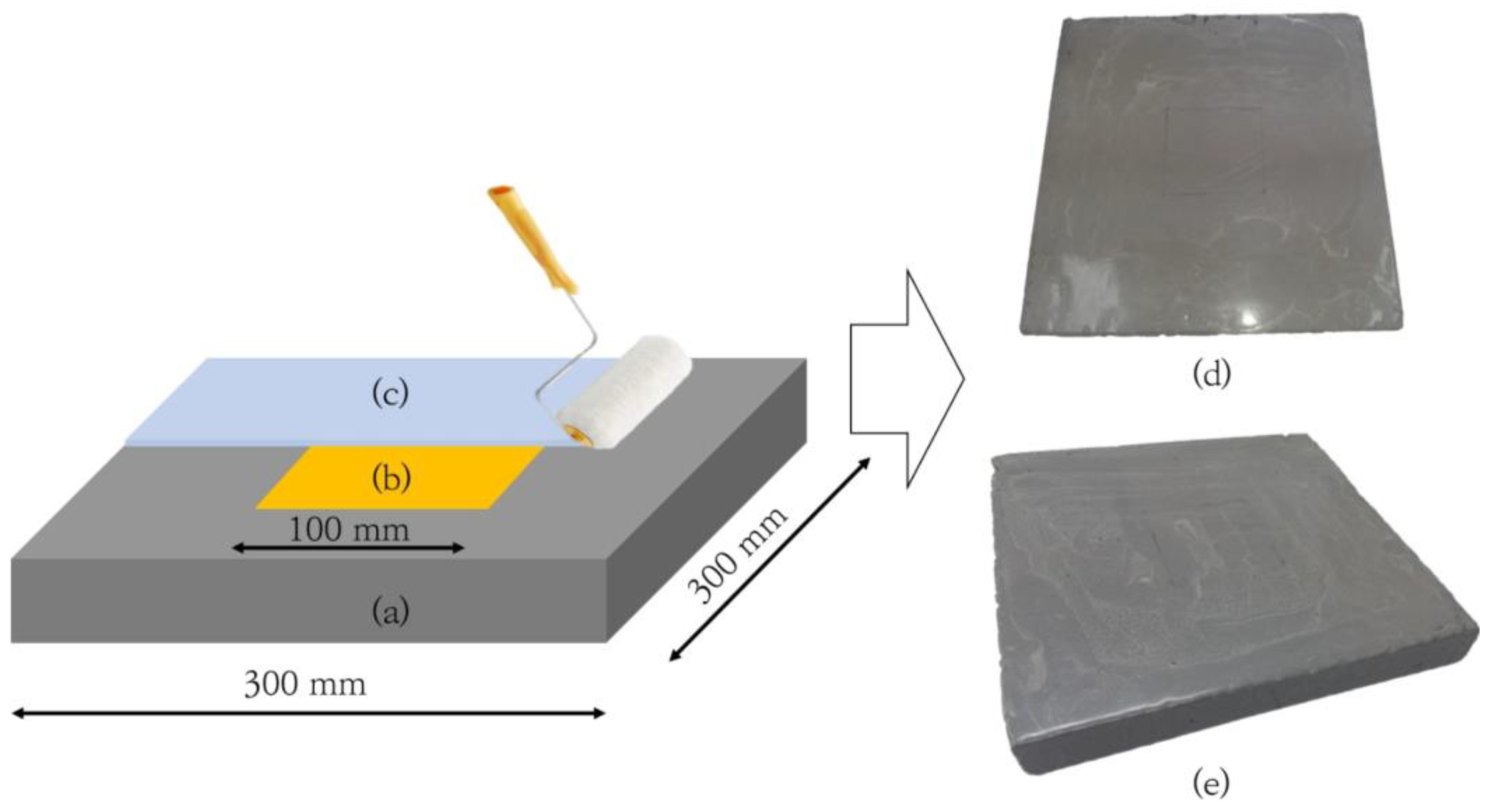
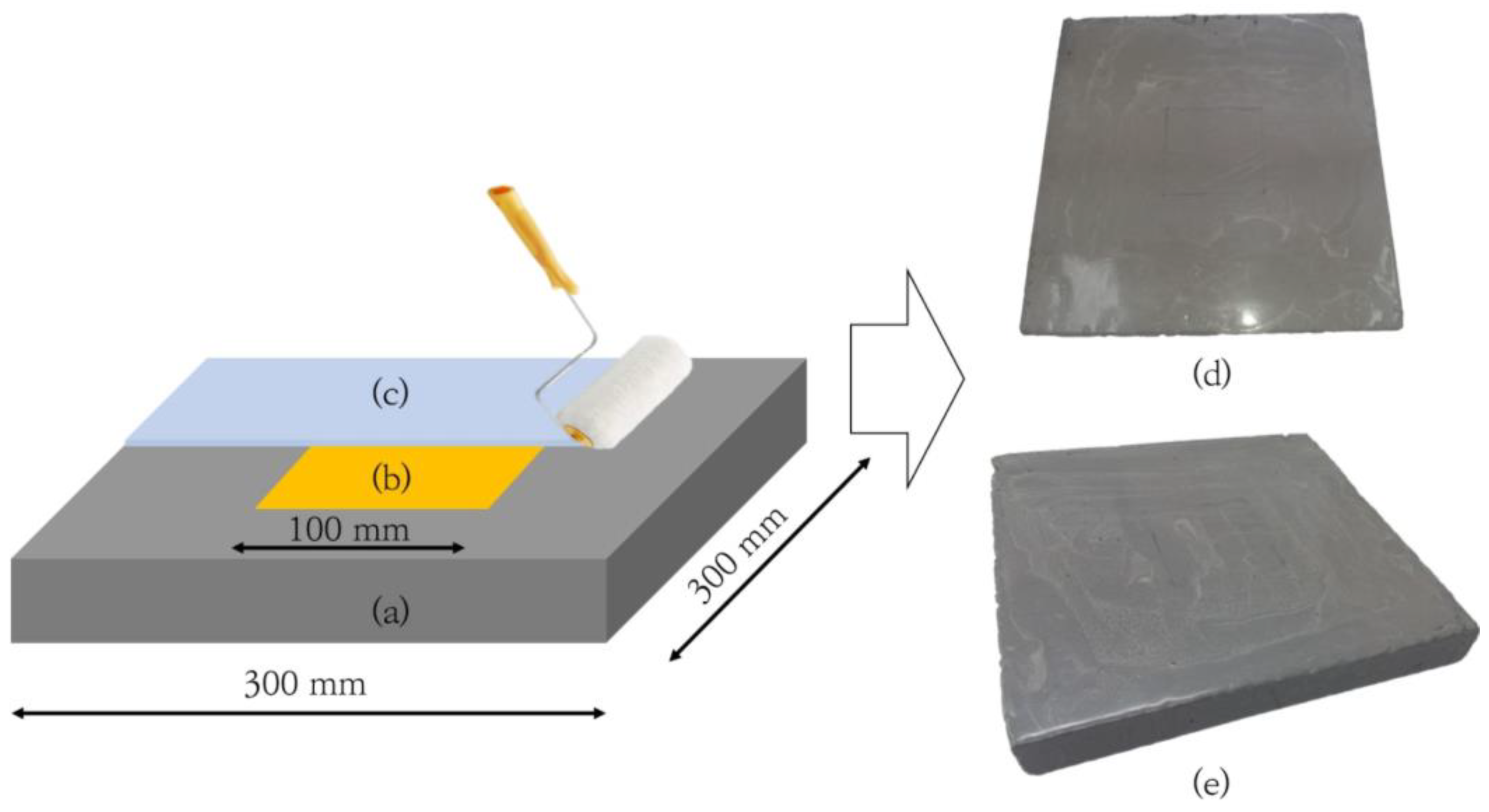
3.1. Specimen Preparation
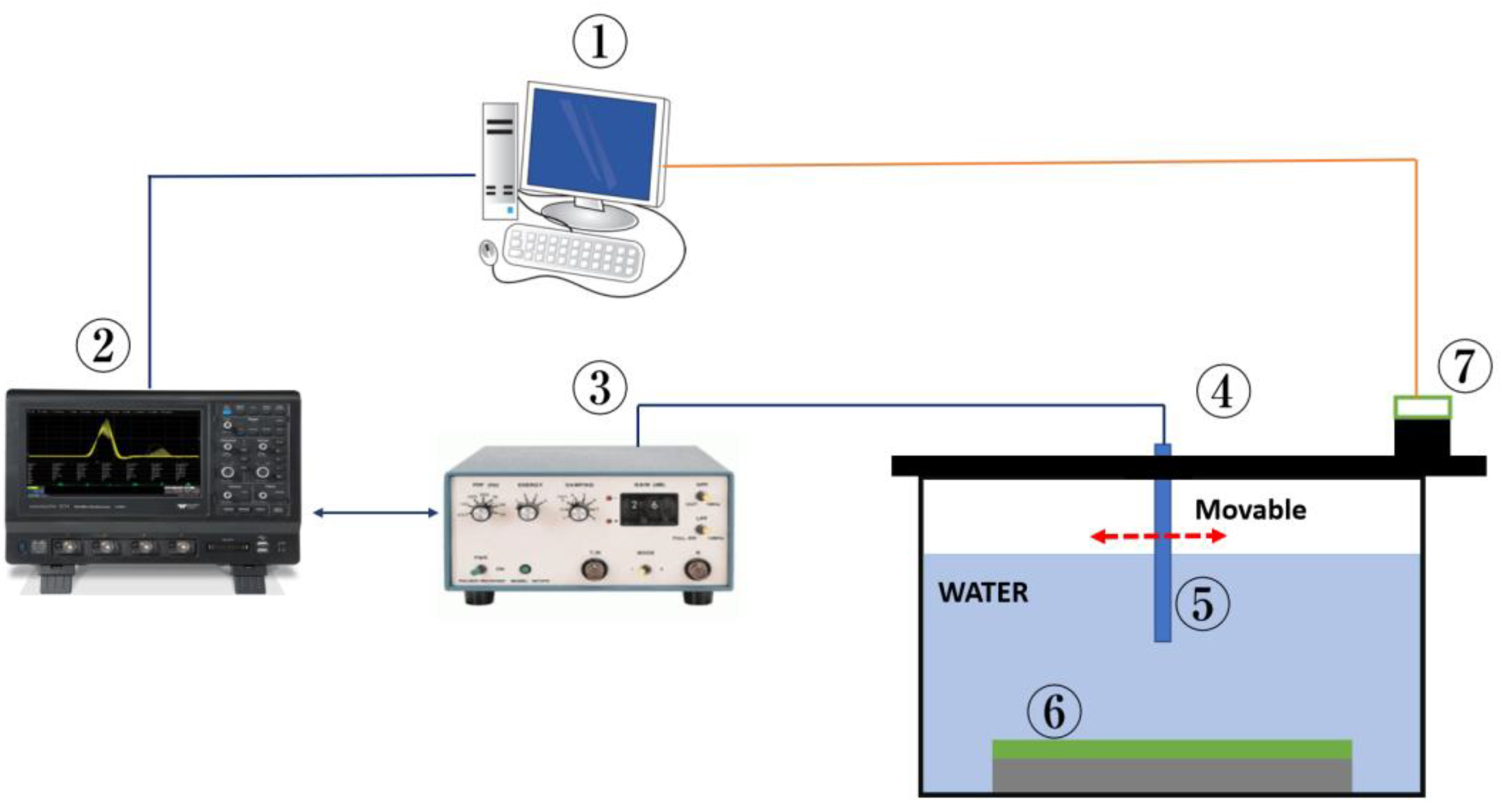
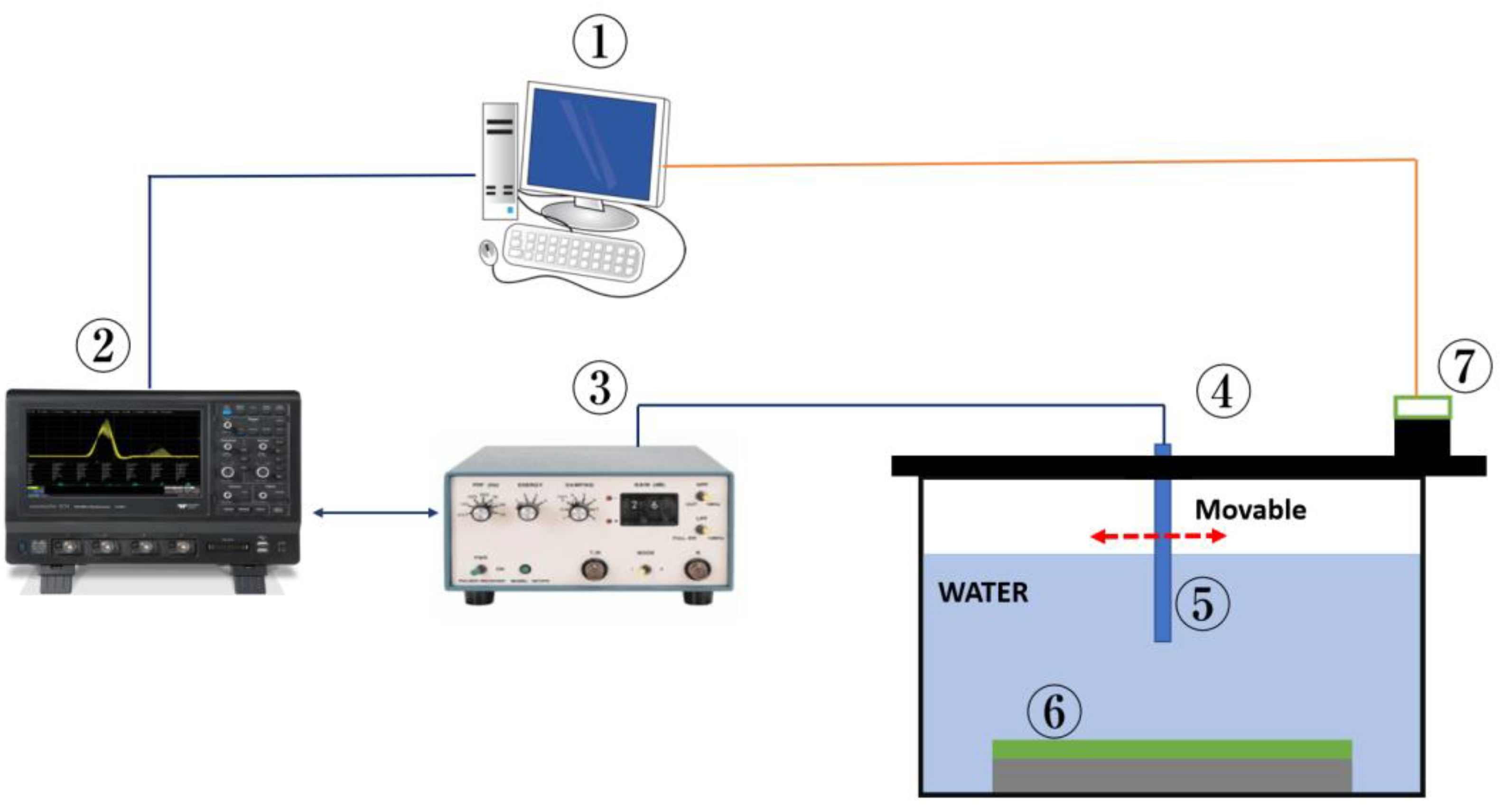
3.2. Immersion Scanning Device
3.3. Ultrasonic Probe
4. Experimental Results
5. Neural Networks
5.1. Introduction to Neural Networks
5.2. Hyperparameters Optimization
5.3. Classification Results
6. Discussion
7. Conclusions
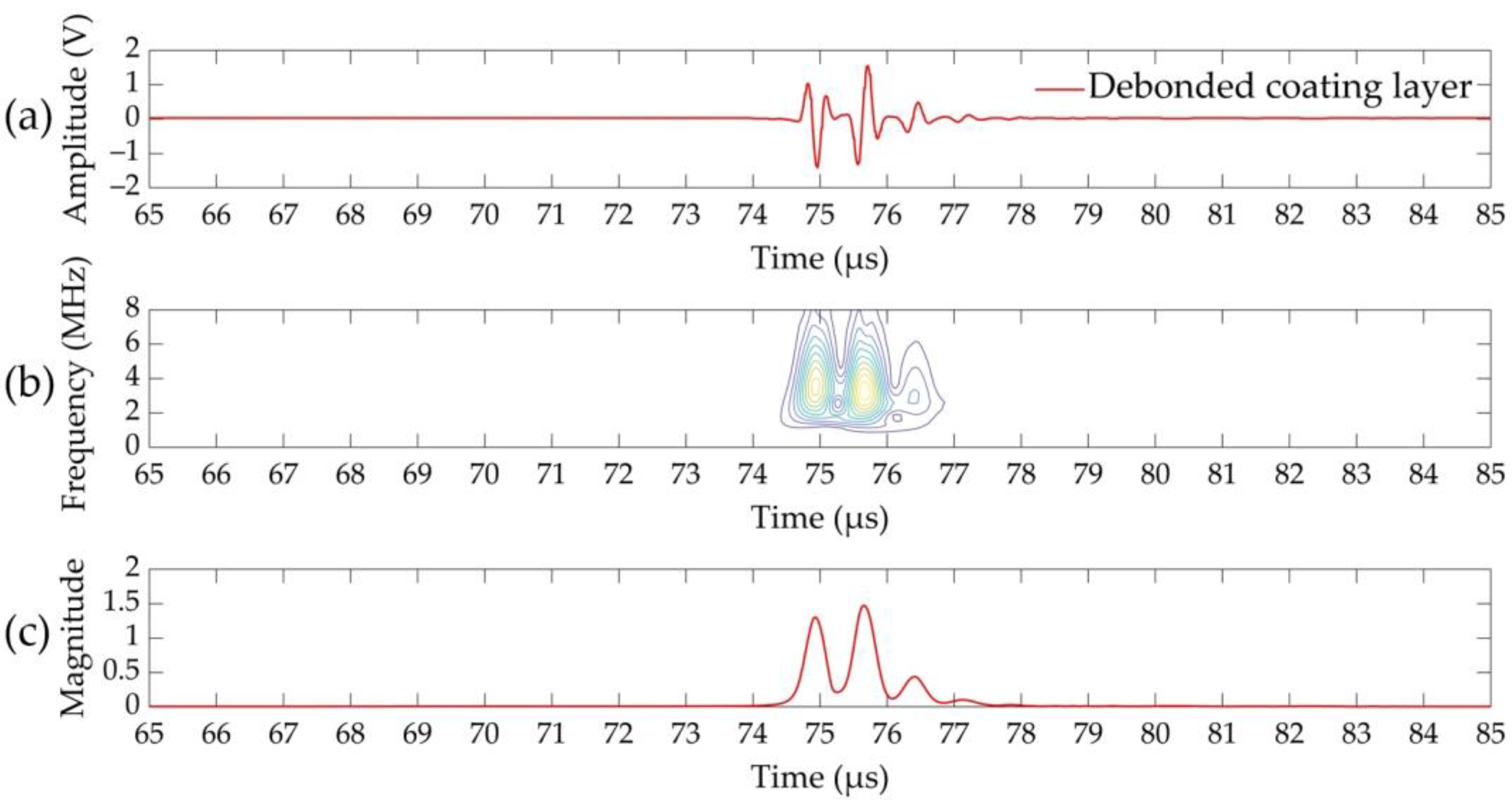
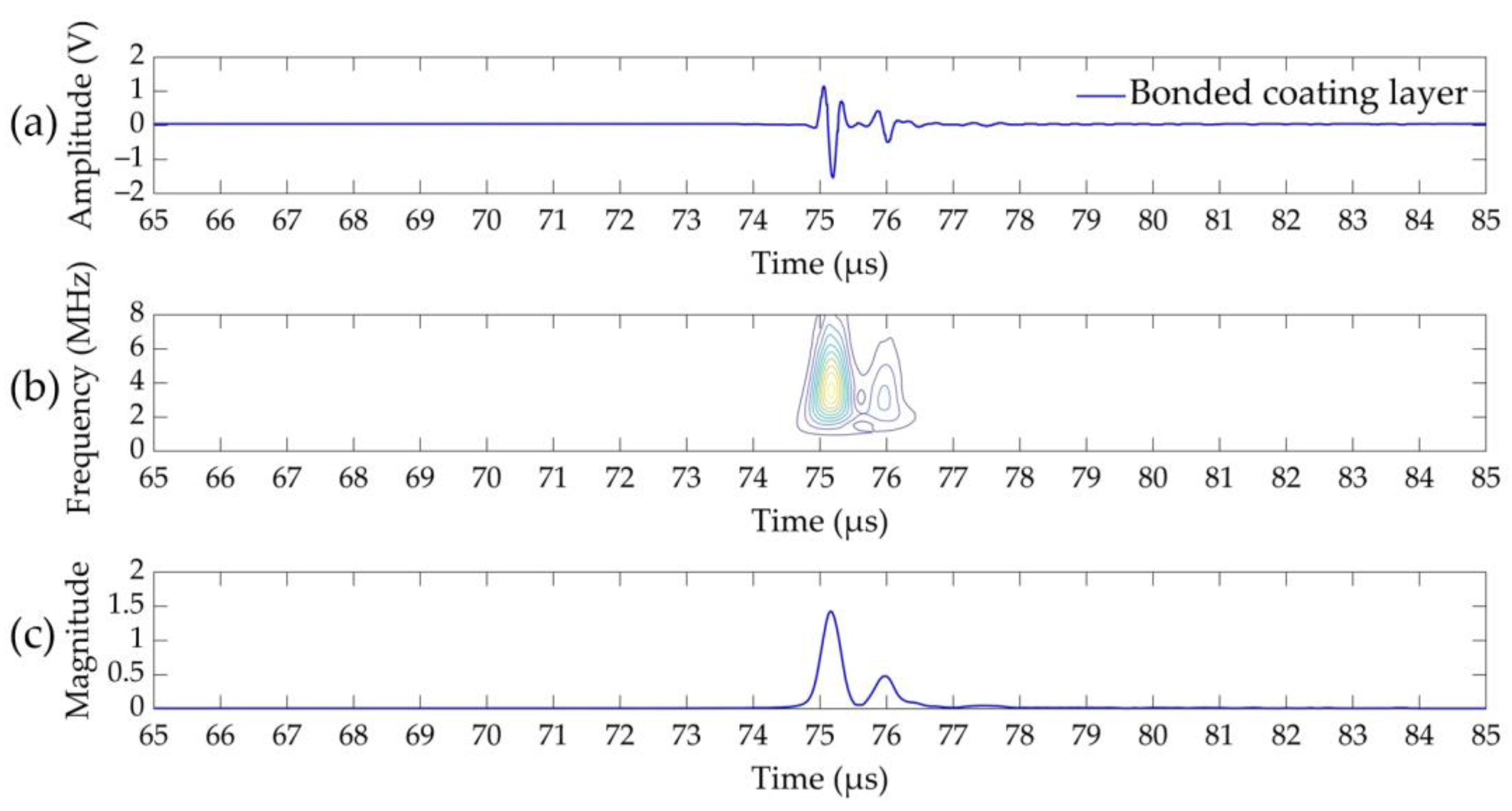
- The local peaks of the CWT magnitude were used to estimate the TOF of the reflected echoes. Despite the fact that the TOF of a reflected echo can also be determined manually in a time-domain waveform, the CWT-based method has the advantage of estimating the TOF of very thin coating layers regardless of water quality, even if the signal-to-noise ratios are low.
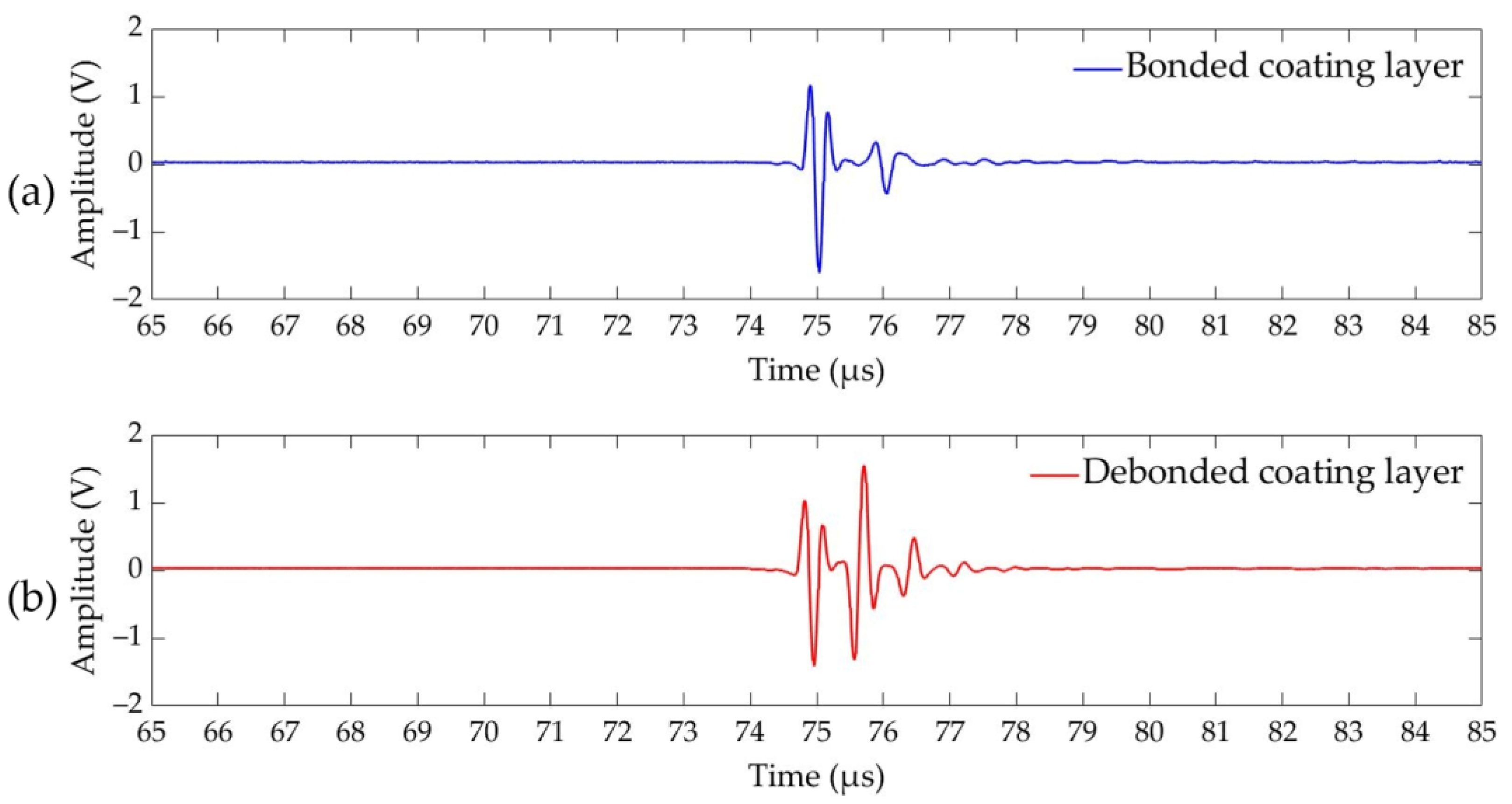
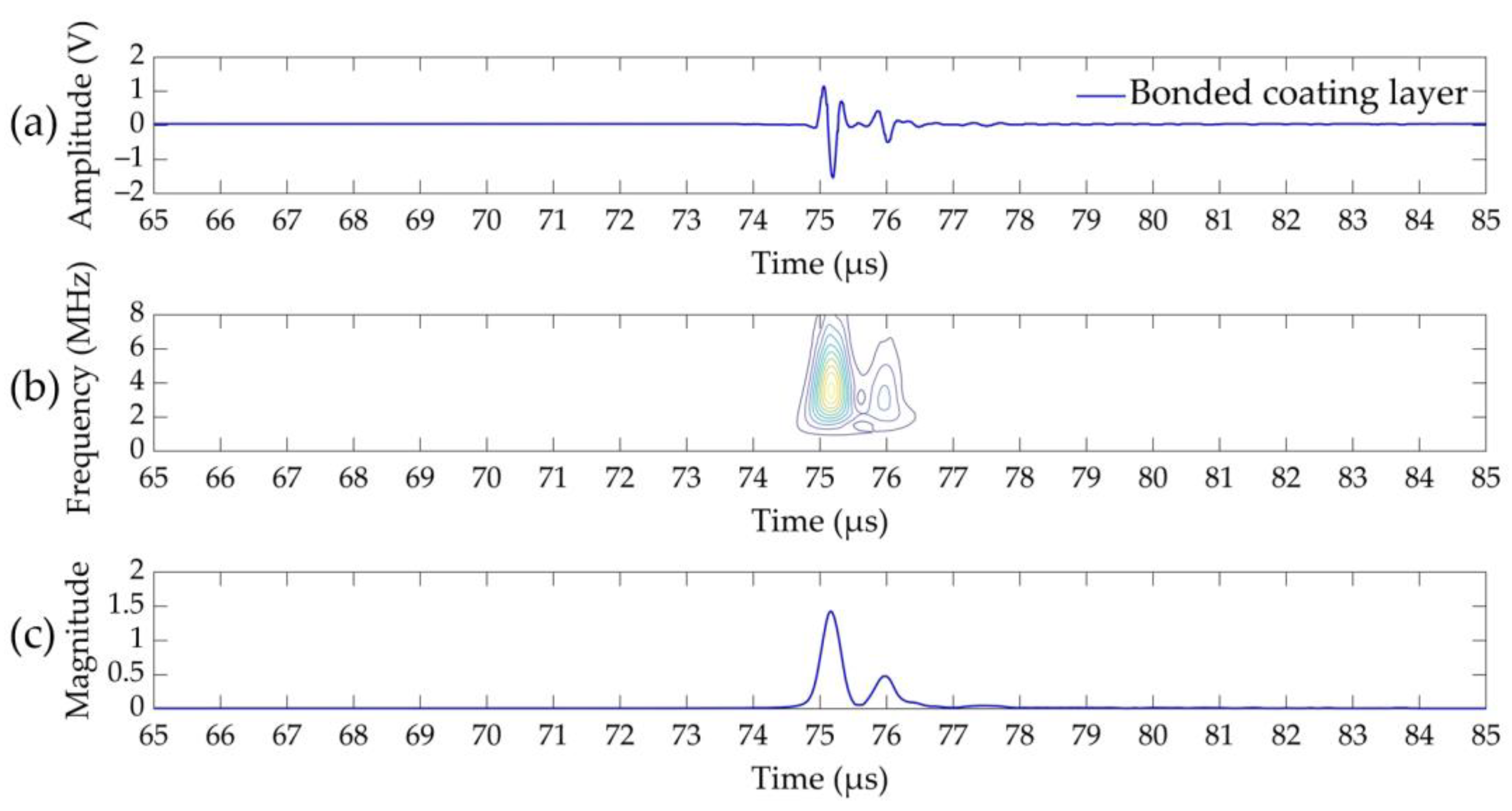
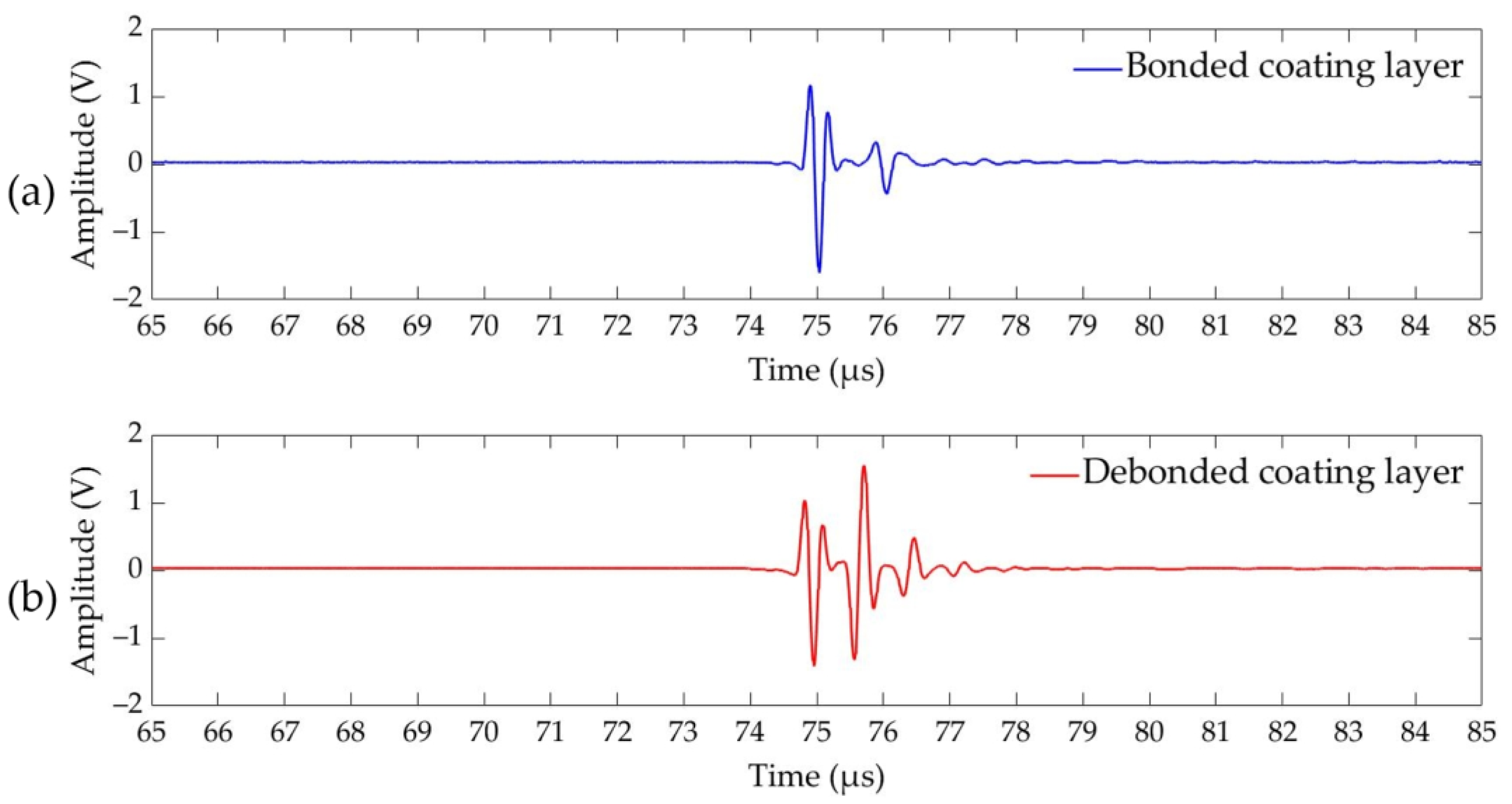
- The CWT magnitude ratio of the two consecutive echoes has been used as a relative parameter to compare attenuation rates in the coating layer. The attenuation rate of the ultrasonic energy was faster in the bonded compared with the delaminated coating layer due to the ultrasonic energy transfer to the concrete. Consequently, the CWT magnitude ratio was higher in the debonded layer.
- The phase at local peaks of CWT magnitude showed a clear difference between bonded and delaminated coating layers. The phase of the reflected echo was shifted by 180 degrees when the coating was delaminated from the concrete.
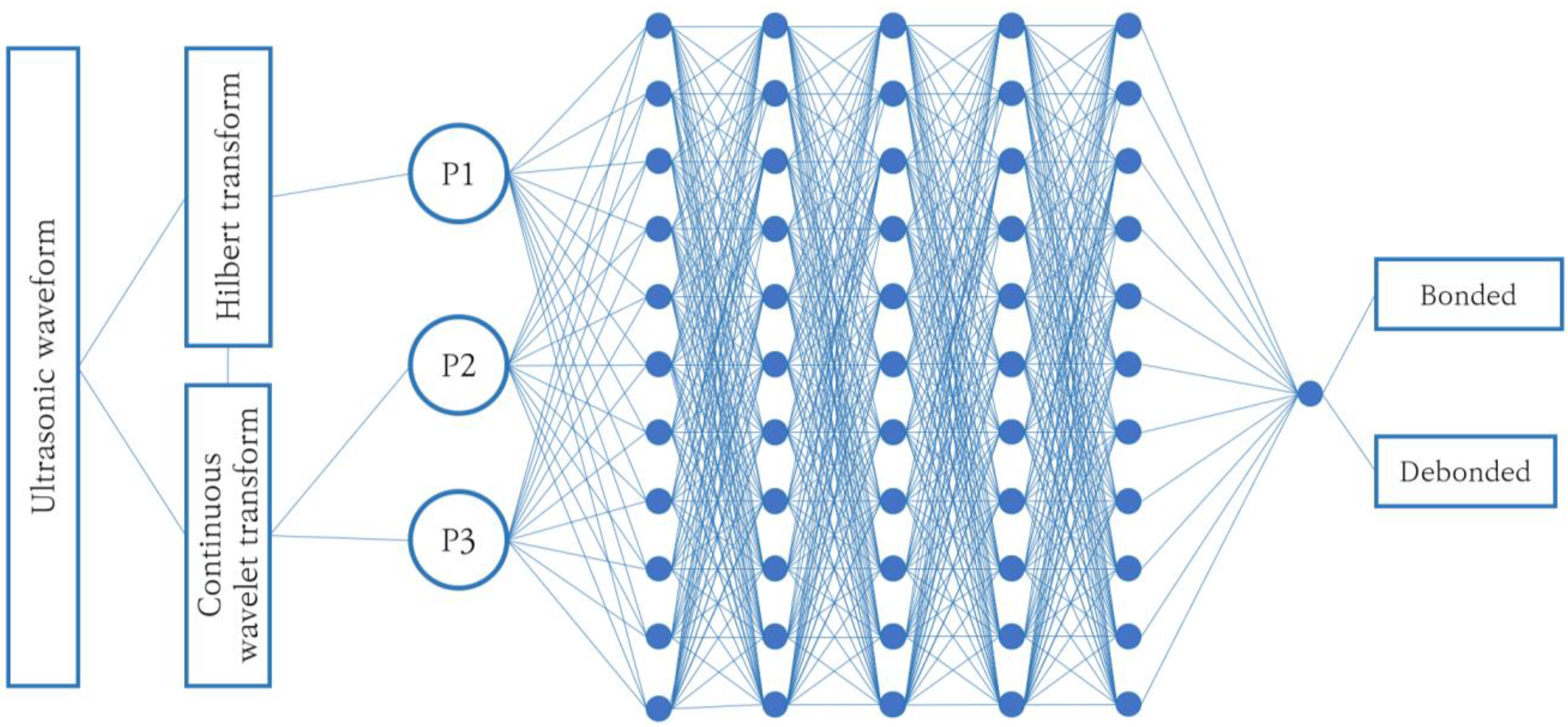
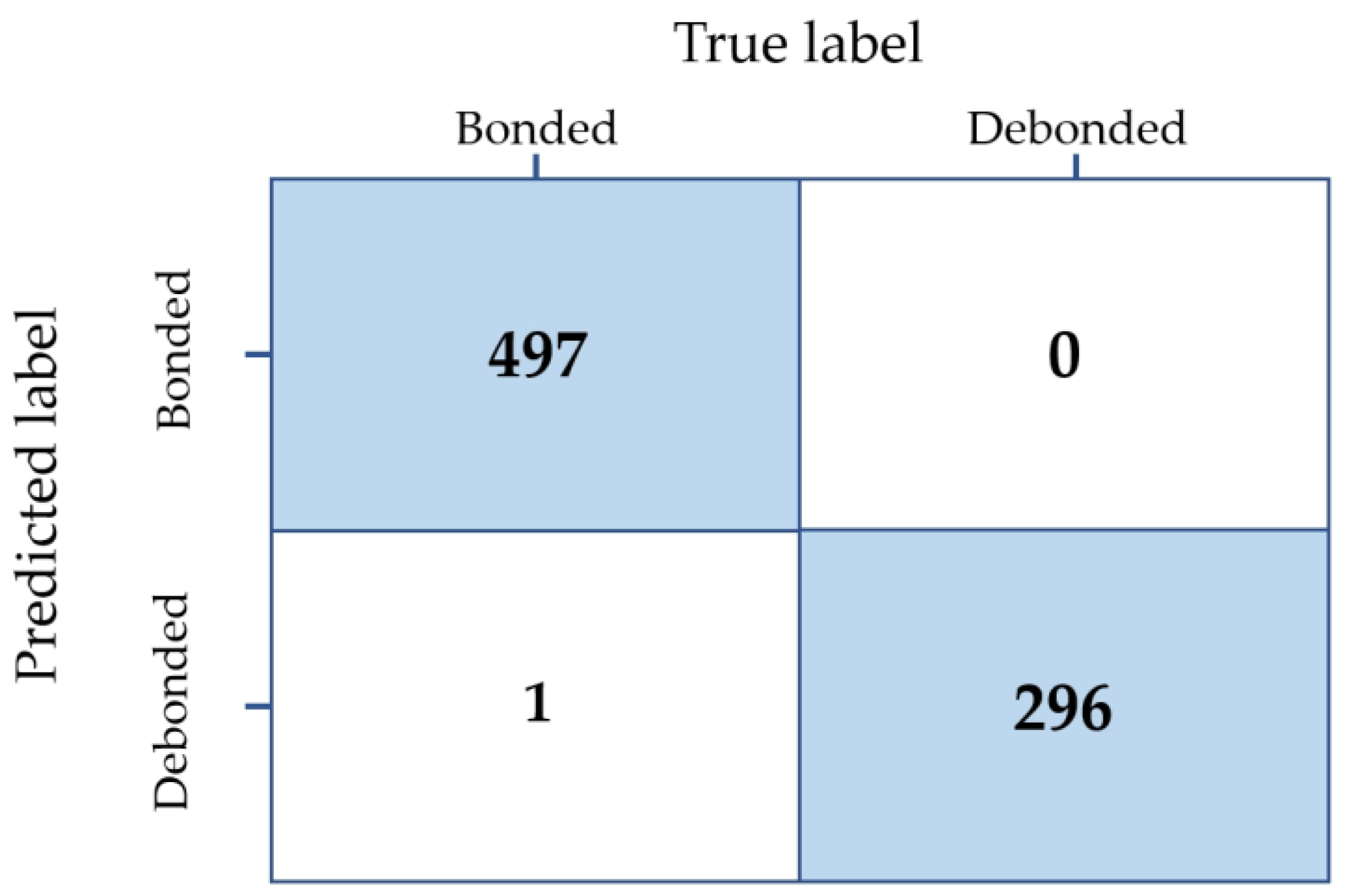
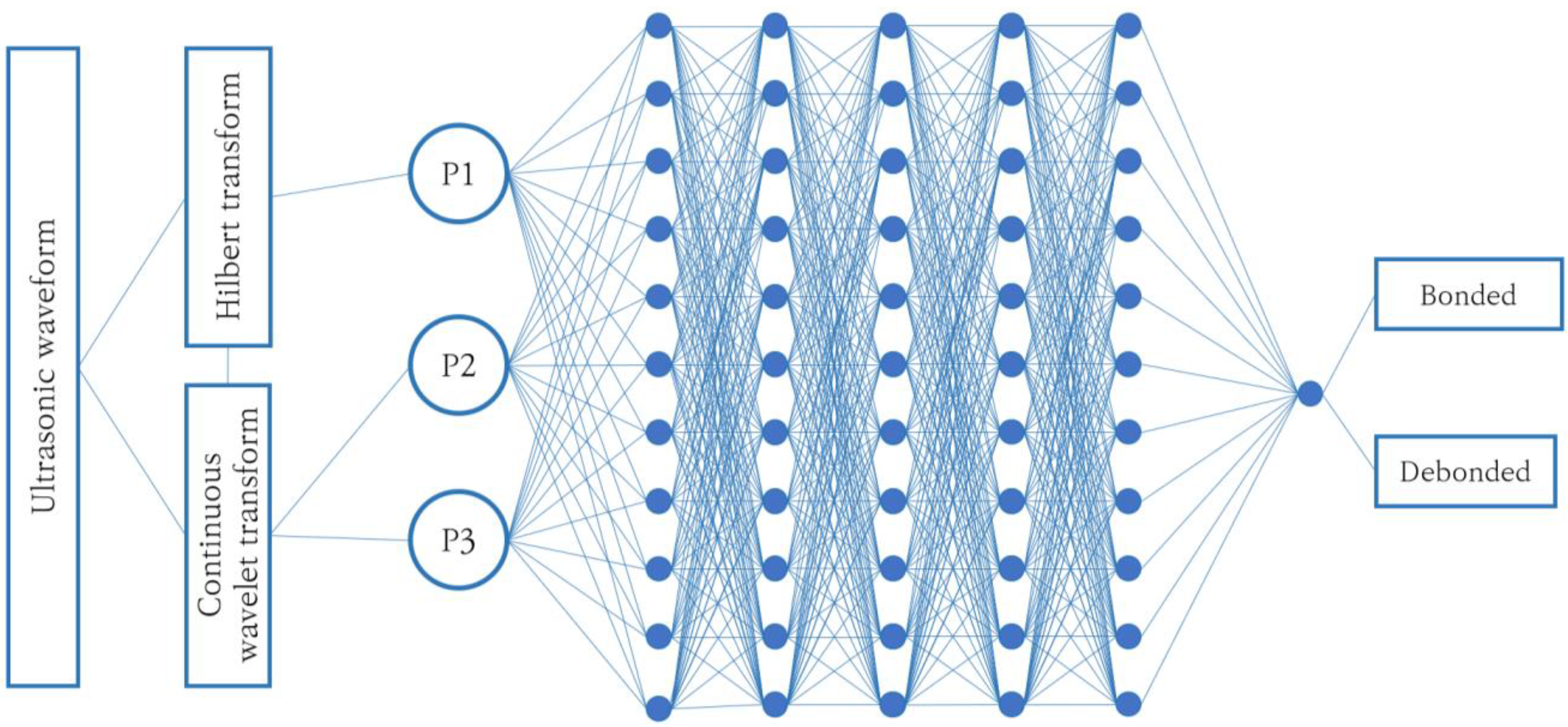
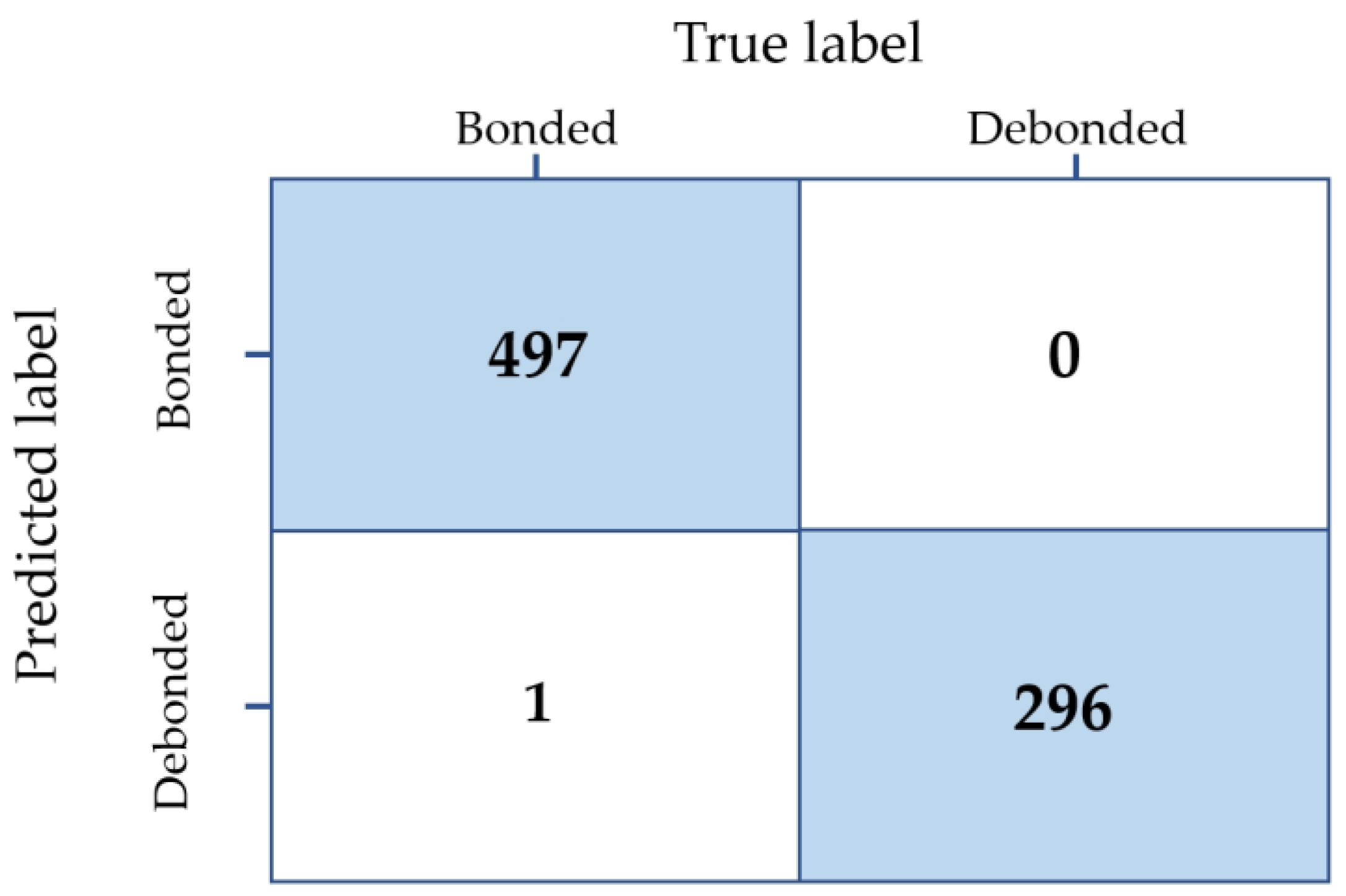
- Automatic classification of the bonding condition was achieved by DNN through the selection of optimal hyperparameters using the Bayesian method. A total of 1592 data sets were used to train, test, and validate the DNN’s performance. The design model predicts the delamination pattern without error for all validation specimens. DNN made an automatic decision to inspect the bonding state without setting any threshold values for detection.
- The developed method is robust and allows for simultaneous inspection of coating layer thickness and adhesion. By incorporating computed relative parameters and DNN, it is possible to examine the bonding state of the coating material even if the distance between the probe and the specimen is changed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, Y.; Gao, W.; Castel, A.; Chen, X.; Liu, A. An integrated framework for modelling time-dependent corrosion propagation in offshore concrete structures. Eng. Struct. 2021, 228, 111482. [Google Scholar] [CrossRef]
- Athibaranan, S.; Karthikeyan, J.; Rawat, S. Investigation on service life prediction models of reinforced concrete structures exposed to chloride laden environment. J. Build. Pathol. Rehabil. 2022, 7, 16. [Google Scholar] [CrossRef]
- Qu, F.; Li, W.; Dong, W.; Tam, V.W.Y.; Yu, T. Durability deterioration of concrete under marine environment from material to structure: A critical review. J. Build. Eng. 2021, 35, 102074. [Google Scholar] [CrossRef]
- Li, G.; Hou, C.; Shen, L. Life-cycle analysis of FRP-strengthened offshore CFST columns suffering from steel corrosion. Compos. Struct. 2021, 277, 114607. [Google Scholar] [CrossRef]
- Kim, K.H.; Kim, M.J.; Kim, H.; Ann, K.Y. Effect of Hydrophobic Surface Treatment in Lowering Ionic Transport into Concrete. Adv. Mater. Sci. Eng. 2020, 2020, 4810259. [Google Scholar] [CrossRef]
- Hola, J.; Sadowski, L.; Schabowicz, K. Nondestructive identification of delaminations in concrete floor toppings with acoustic methods. Autom. Construct. 2011, 20, 799–807. [Google Scholar] [CrossRef]
- Safiuddin, M. Concrete damage in field conditions and protective sealer and coating systems. Coatings 2017, 7, 90. [Google Scholar] [CrossRef]
- Liu, Z.; Xu, K.; Li, D.; Ta, D.; Wang, W. Automatic mode extraction of ultrasonic guided waves using synchrosqueezed wavelet transform. Ultrasonics 2019, 99, 105948. [Google Scholar] [CrossRef]
- Wan, L.; Wei, Y.; Zhao, H.; Cao, H.; Li, J. Influence of microdefect size on corrosion behavior of epoxy-coated rebar for application in seawater-mixed concrete. Coatings 2021, 11, 439. [Google Scholar] [CrossRef]
- Samira, D.; Fares, D.; Toufik, B.; Ville, A.W.; Wvd, D. Experimental Ultrasonic NDT Signals of Cement paste and mortar Based on Time Frequency Analysis. In Proceedings of the 2019 International Conference on Advanced Electrical Engineering (ICAEE), Algiers, Algeria, 19–21 November 2019; pp. 1–5. [Google Scholar]
- Jiao, Y.; Li, Z.; Zhu, J.; Xue, B.; Zhang, B. ABIDE: A Novel Scheme for Ultrasonic Echo Estimation by Combining CEEMD-SSWT Method with EM Algorithm. Sustainability 2022, 14, 1960. [Google Scholar] [CrossRef]
- Gao, W.; Liu, W.; Hu, Y.; Wang, J. Study of ultrasonic near-field region in ultrasonic liquid-level monitoring system. Micromachines 2020, 11, 763. [Google Scholar] [CrossRef] [PubMed]
- Rautela, M.; Gopalakrishnan, S. Ultrasonic guided wave based structural damage detection and localization using model assisted convolutional and recurrent neural networks. Expert Syst. Appl. 2021, 167, 114189. [Google Scholar] [CrossRef]
- Liu, T.; Pei, C.; Cheng, X.; Zhou, H.; Xiao, P.; Chen, Z. Adhesive debonding inspection with a small EMAT in resonant mode. NDT E Int. 2018, 98, 110–116. [Google Scholar] [CrossRef]
- Dou, P.; Wu, T.; Luo, Z. Wide range measurement of lubricant film thickness based on ultrasonic reflection coefficient phase spectrum. J. Tribol. 2019, 141, 031702. [Google Scholar] [CrossRef]
- Al-Aufi, Y.A.; Hewakandamby, B.N.; Dimitrakis, G.; Holmes, M.; Hasan, A.; Watson, N.J. Thin film thickness measurements in two phase annular flows using ultrasonic pulse echo techniques. Flow Meas. Instrum. 2019, 66, 67–78. [Google Scholar] [CrossRef]
- Jaganathan, A.P. Multichannel surface wave analysis of reinforced concrete pipe segments using longitudinal and circumferential waves induced by a point impact. J. Appl. Geophys. 2019, 163, 40–54. [Google Scholar] [CrossRef]
- Smith, R.A.; Nelson, L.J.; Mienczakowski, M.J.; Wilcox, P.D. Ultrasonic Analytic-Signal Responses from Polymer-Matrix Composite Laminates. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 231–243. [Google Scholar] [CrossRef] [Green Version]
- Sturtevant, B.T.; Velisavljevic, N.; Sinha, D.N.; Kono, Y.; Pantea, C. A broadband wavelet implementation for rapid ultrasound pulse-echo time-of-flight measurements. Rev. Sci. Instrum. 2020, 91, 075115. [Google Scholar] [CrossRef]
- Wang, F.; Liu, J.; Mohummad, O.; Wang, Y. Research on Debonding Defects in Thermal Barrier Coatings Structure by Thermal-Wave Radar Imaging (TWRI). Int. J. Thermophys. 2018, 39, 1–9. [Google Scholar] [CrossRef]
- Chang, M.; Lu, Z.; Huang, Q.; Yang, C. Parameter estimation for ultrasonic echo signals through improved matching pursuit and flower pollination algorithms. Measurement: J. Int. Meas. Confed. 2022, 194, 111010. [Google Scholar] [CrossRef]
- Cao, H.; Jiang, M.; Jia, L.; Ma, M.; Sun, L.; Zhang, L.; Tian, A.; Liang, J. An ultrasonic signal processing method to improve defect depth estimation in composites based on empirical mode decomposition. Meas. Sci. Technol. 2021, 32, 115112. [Google Scholar] [CrossRef]
- Yang, X.; Verboven, E.; Ju, B.F.; Kersemans, M. Comparative study of ultrasonic techniques for reconstructing the multilayer structure of composites. NDT E Int. 2021, 121, 102460. [Google Scholar] [CrossRef]
- Malik, M.A.; Saniie, J. Gabor transform with optimal time-frequency resolution gor ultrasonic applications. In Proceedings of the 1998 IEEE Ultrasonic Symposium, Sendai, Japan, 5–8 October 1998. [Google Scholar] [CrossRef]
- Wee, A.; Grayden, D.B.; Petkovic-duran, K.; Smith, D. A continuous wavelet transform algorithm for peak detection. Electrophoresis 2008, 29, 4215–4225. [Google Scholar] [CrossRef]
- Crawford, A.; Droubi, M.G.; Faisal, N.H. Analysis of Acoustic Emission Propagation in Metal-to-Metal Adhesively Bonded Joints. J. Nondestruct. Eval. 2018, 37, 33. [Google Scholar] [CrossRef] [Green Version]
- Lin, L.; Zhang, W.; Ma, Z.; Lei, M. Porosity estimation of abradable seal coating with an optimized support vector regression model based on multi-scale ultrasonic attenuation coefficient. NDT E Int. 2020, 113, 102272. [Google Scholar] [CrossRef]
- Liu, Z.; Lin, B.; Liang, X.; Du, A. Synchrosqueezed wavelet transform-based method for characterizing the dispersive nature of laser-excited surface acoustic waves propagating through the coated or damaged medium. Meas. J. Int. Meas. Confed. 2021, 185, 109965. [Google Scholar] [CrossRef]
- Soleimanpour, R.; Soleimani, S.M.; Mohammad, N.K. Damage detection and localization in loose bolted joints. Procedia Struct. Integr. 2022, 37, 956–963. [Google Scholar] [CrossRef]
- Shokouhi, P.; Paso, E. Time-Frequency Techniques for the Impact Echo Data Analysis and Interpretations. In Proceedings of the 9th European Conference on NDT, Berlin, Germany, 25–29 September 2006. [Google Scholar]
- Hu, X.; Jin, T. Short-range vital signs sensing based on EEMD and CWT using IR-UWB radar. Sensors 2016, 16, 2025. [Google Scholar] [CrossRef] [Green Version]
- Lu, Z.; Yang, C.; Qin, D.; Luo, Y.; Momayez, M. Estimating ultrasonic time-of-flight through echo signal envelope and modified Gauss Newton method. Meas. J. Int. Meas. Confed. 2016, 94, 355–363. [Google Scholar] [CrossRef]
- Miao, S.; Liao, R. Agent-Based Methods for Medical Image Registration. In Deep Learning and Convolutional Neural Networks for Medical Imaging and Clinical Informatics; Lu, L., Wang, X., Carneiro, G., Yang, L., Eds.; Springer: Cham, Switzerland, 2019; pp. 323–345. [Google Scholar] [CrossRef]
- Arya, S.; Singh, R. A Comparative Study of CNN and AlexNet for Detection of Disease in Potato and Mango leaf. In Proceedings of the 2019 International Conference on Issues and Challenges in Intelligent Computing Techniques ICICT, Ghaziabad, India, 27–28 September 2019. [Google Scholar] [CrossRef]
- Rautela, M.; Gopalakrishnan, S.; Gopalakrishnan, K.; Deng, Y. Ultrasonic guided waves based identification of elastic properties using 1D-Convolutional neural networks. In Proceedings of the 2020 IEEE International Conference on Prognostics and Health Management (ICPHM), Detroit, MI, USA, 8–10 June 2020. [Google Scholar] [CrossRef]
- Wu, J.; Chen, X.Y.; Zhang, H.; Xiong, L.D.; Lei, H.; Deng, S.H. Hyperparameter optimization for machine learning models based on Bayesian optimization. J. Electron. Sci. Technol. 2019, 17, 26–40. [Google Scholar] [CrossRef]
- Gómez-Flores, W.; Hernández-López, J. Automatic adjustment of the pulse-coupled neural network hyperparameters based on differential evolution and cluster validity index for image segmentation. Appl. Soft Comput. 2020, 97, 105547. [Google Scholar] [CrossRef]
- Victoria, A.H.; Maragatham, G. Automatic tuning of hyperparameters using Bayesian optimization. Evol. Syst. 2021, 12, 217–223. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, X.; Zhu, J.; Huang, L.; Lu, C.; Chen, Y. Sensing Signal Analysis and Imaging Processing with High Frequency Ultrasonic Testing for Fe-based Amorphous Coatings. IEEE Sens. J. 2021, 2021, 1–8. [Google Scholar] [CrossRef]
- Zhang, S.; Lv, G.; Guo, S.; Zhang, Y.; Feng, W. Porosity Characterization of Thermal Barrier Coatings by Ultrasound with Genetic Algorithm Backpropagation Neural Network. Complexity 2021, 2021, 8869928. [Google Scholar] [CrossRef]
- Kishore, M.B.; Lee, H.G.; Abera, A.G.; Kim, H.J.; Seok, C.S.; Song, S.J. Quantitative Evaluation of Partial Delamination in Thermal Barrier Coatings Using Ultrasonic C-scan Imaging. Int. J. Precis. Eng. Manuf. 2020, 21, 157–165. [Google Scholar] [CrossRef]
- Hernandez Delgadillo, H.; Kern, B.; Loendersloot, R.; Yntema, D.; Akkerman, R. A Methodology Based on Pulse-Velocity Measurements to Quantify the Chemical Degradation Levels in Thin Mortar Specimens. J. Nondestruct. Eval. 2018, 37, 79. [Google Scholar] [CrossRef] [Green Version]
- Fülöp, L.; Ferreira, M.; Tuhti, A.; Rapaport, G. Assessing the challenges of condition assessment of steel-concrete (SC) composite elements using NDE. Case Stud. Constr. Mater. 2022, 16, e00887. [Google Scholar] [CrossRef]
- Li, Y.; Han, Z.; Chen, Y. Research on Ultrasonic Testing Methods for Adhesion Quality of Ceramic Coatings. MATEC Web Conf. 2017, 114, 02001. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Shaw, C.; Gelman, L.; Grattan, K.T.V. Advances in test and measurement of the interface adhesion and bond strengths in coating-substrate systems, emphasising blister and bulk techniques. Meas. J. Int. Meas. Confed. 2019, 139, 387–402. [Google Scholar] [CrossRef]
- Völker, C.; Shokouhi, P. Multi sensor data fusion approach for automatic honeycomb detection in concrete. NDT E Int. 2015, 71, 54–60. [Google Scholar] [CrossRef]
- Zhang, Z.; Guo, S.; Li, Q.; Cui, F.; Malcolm, A.A.; Su, Z.; Liu, M. Ultrasonic detection and characterization of delamination and rich resin in thick composites with waviness. Compos. Sci. Technol. 2020, 189, 108016. [Google Scholar] [CrossRef]
- La Malfa Ribolla, E.; Rezaee Hajidehi, M.; Rizzo, P.; Fileccia Scimemi, G.; Spada, A.; Giambanco, G. Ultrasonic inspection for the detection of debonding in CFRP-reinforced concrete. Struct. Infrastruct. Eng. 2018, 14, 807–816. [Google Scholar] [CrossRef]
- Ghavamian, A.; Mustapha, F.; Baharudin, B.T.H.T.; Yidris, N. Detection, localisation and assessment of defects in pipes using guided wave techniques: A review. Sensors 2018, 18, 4470. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Hu, S.; Li, W.; Hu, Y. Construction and Building Materials Corrosion monitoring for prestressed concrete cylinder pipe spigot with combined use of Tafel extrapolation and surface acoustic wave methods. Constr. Build. Mater. 2022, 337, 127572. [Google Scholar] [CrossRef]
- Ho, M.; El-Borgi, S.; Patil, D.; Song, G. Inspection and monitoring systems subsea pipelines: A review paper. Struct. Health Monit. 2020, 19, 606–645. [Google Scholar] [CrossRef] [Green Version]
- Janků, M.; Cikrle, P.; Grošek, J.; Anton, O.; Stryk, J. Comparison of infrared thermography, ground-penetrating radar and ultrasonic pulse echo for detecting delaminations in concrete bridges. Constr. Build. Mater. 2019, 225, 1098–1111. [Google Scholar] [CrossRef]
- Georgiou, G.; Cohen, F.S. Tissue characterization using the continuous wavelet transform Part I: Decomposition method. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 355–363. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Tang, B.; Chen, Z. Operational modal parameter identification based on PCA-CWT. Meas. J. Int. Meas. Confed. 2019, 139, 334–345. [Google Scholar] [CrossRef]
- Lee, S.M. Analysis of Center Frequency Effect on Damping Parameters Estimation Using Continuous Wavelet Transform. KSCE J. Civ. Eng. 2021, 25, 1399–1409. [Google Scholar] [CrossRef]
- Luan, Y.; Sun, T.; Feng, J.; Gang, T. Ultrasonic evaluation of TiAl and 40Cr diffusion bonding quality based on time-scale characteristics extraction. NDT E Int. 2011, 44, 789–796. [Google Scholar] [CrossRef]
- Jordan, D.; Miksad, R.W.; Powers, E.J.; Jordan, D.; Miksad, R.W. Implementation of the continuous wavelet transform for digital time series analysis Implementation of the continuous wavelet transform for digital time series analysis. Rev. Sci. Instrum. 2009, 68, 1484. [Google Scholar] [CrossRef]
- Elefante, A.; Nilsen, M.; Sikström, F.; Christiansson, A.K.; Maggipinto, T.; Ancona, A. Detecting beam offsets in laser welding of closed-square-butt joints by wavelet analysis of an optical process signal. Opt. Laser Technol. 2019, 109, 178–185. [Google Scholar] [CrossRef]
- Sagasta, F.; Zitto, M.E.; Piotrkowski, R.; Benavent-Climent, A.; Suarez, E.; Gallego, A. Acoustic emission energy b-value for local damage evaluation in reinforced concrete structures subjected to seismic loadings. Mech. Syst. Signal Process. 2018, 102, 262–277. [Google Scholar] [CrossRef]
- Chang, C.C.; Yu, C.P.; Lin, Y. Distinction between crack echoes and rebar echoes based on Morlet Wavelet Transform of impact echo signals. NDT E Int. 2019, 108, 102169. [Google Scholar] [CrossRef]
- Gong, W.; Xiang, C.; Mao, F.; Ma, X.; Liang, A. Wavelet modulus maxima method for on-line wavelength location of pulsed lidar in CO_2 differential absorption lidar detection. Photonics Res. 2016, 4, 74. [Google Scholar] [CrossRef]
- Yi, H.; Shu, H. The improvement of the Morlet wavelet for multi-period analysis of climate data. Comptes Rendus Geosci. 2012, 344, 483–497. [Google Scholar] [CrossRef]
- Qin, Z.; Chen, L.; Bao, X. Continuous wavelet transform for non- stationary vibration detection with phase-OTDR. Opt. Express 2012, 20, 20459–20465. [Google Scholar] [CrossRef] [PubMed]
- Moca, V.V.; Bârzan, H.; Nagy-Dăbâcan, A.; Mureșan, R.C. Time-frequency super-resolution with superlets. Nat. Commun. 2021, 12, 337. [Google Scholar] [CrossRef]
- Mei, Z.; Kuts, Y.; Kochan, O.; Lysenko, I.; Levchenko, O.; Vlakh-Vyhrynovska, H. Using Signal Phase in Computerized Systems of Non-destructive Testing. Meas. Sci. Rev. 2022, 22, 32–43. [Google Scholar] [CrossRef]
- Wang, J.; Chen, J.; Wang, P.; Pan, X.; Gao, A. SAR Imaging Algorithm Based on Hilbert Transform in Long Wavelength Sar System. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Kim, Y.; Park, J.; Kim, H. Signal-Processing Framework for Ultrasound Compressed Sensing Data: Envelope Detection and Spectral Analysis. Appl. Sci. 2020, 10, 6956. [Google Scholar] [CrossRef]
- Demirli, R.; Saniie, J. Model-based estimation of ultrasonic echoes part I: Analysis and algorithms. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 787–802. [Google Scholar] [CrossRef]
- Haldren, H.A.; Perey, D.F.; Yost, W.T.; Cramer, K.E.; Gupta, M.C. Swept-frequency ultrasonic phase evaluation of adhesive bonding in tri-layer structures. Acoust. Soc. Am. 2019, 145, 1609–1618. [Google Scholar] [CrossRef]
- Lavrentyev, A.I.; Beals, J.T. Ultrasonic measurement of the diffusion bond strength. Ultrasonics 2000, 38, 513–516. [Google Scholar] [CrossRef] [PubMed]
- Tattersall, H.G. The ultrasonic pulse-echo technique as applied to adhesion testing. J. Phys. D Appl. Phys. 1973, 6, 819–832. [Google Scholar] [CrossRef]
- Won, B.; Kim, M.O.; Park, S.; Yi, J.H. Effects of water exposure on the interfacial bond between an epoxy resin coating and a concrete substrate. Materials 2019, 12, 3715. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, B.; Shi, W.; Zhao, B.; Tan, J. A modal decomposition imaging algorithm for ultrasonic detection of delamination defects in carbon fiber composite plates using air-coupled Lamb waves. Measurement 2022, 195, 111165. [Google Scholar] [CrossRef]
- Smagulova, D.; Jasiuniene, E. Non—destructive evaluation of dissimilar material joints. In Proceedings of the 12th European Conference on non-Destructive Testing (ECNDT 2018), Gothenburg, Sweden, 11–15 June 2018; pp. 1–4. [Google Scholar]
- Fortineau, J.P.; Vander Meulen, F.; Fortineau, J.; Feuillard, G. Efficient algorithm for discrimination of overlapping ultrasonic echoes. Ultrasonics 2017, 73, 253–261. [Google Scholar] [CrossRef]
- Wang, J.; Liu, B.; Kan, G.; Li, G.; Zheng, J.; Meng, X. Frequency dependence of sound speed and attenuation in fine-grained sediments from 25 to 250 kHz based on a probe method. Ocean Eng. 2018, 160, 45–53. [Google Scholar] [CrossRef]
- Hua, J.; Zeng, L.; Gao, F.; Lin, J. Dictionary design for Lamb wave sparse decomposition. NDT E Int. 2019, 103, 98–110. [Google Scholar] [CrossRef]
- Brook, M.V. Ultrasonic Inspection Technology Development and Search Unit Design: Examples of Practical Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2012; ISBN 9780470874349. [Google Scholar]
- Ziskin, M.C.; Lewin, P.A. Measurement uncertainty in ultrasonic exposimetry. In Ultrasonic Exposimetry, 1st ed.; Ziskin, M.C., Lewin, P.A., Eds.; CRC Press: Boca Raton, FL, USA, 1993; pp. 409–443. [Google Scholar]
- Petronyuk, Y.S.; Levin, V.M.; Titov, S.A. Shape of short ultrasonic echo-pulses focused in the solid plate. Phys. Procedia 2015, 70, 626–630. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Liu, S.; Liu, F.; Xun, G. Multi-mode ultrasonic visualization of porosity in composites using a focused transducer with high sensitivity and near-surface resolution. Compos. Part C Open Access 2021, 4, 100104. [Google Scholar] [CrossRef]
- Mina, I.G.; Trolier-mckinstry, S. High Frequency Transducers from PZT Films. Ph.D. Thesis, Pennsylvania State University, State College, PA, USA, 2007. [Google Scholar]
- Giurlani, W.; Berretti, E.; Innocenti, M.; Lavacchi, A. Measuring the thickness of metal coatings: A review of the methods. Coatings 2020, 10, 1211. [Google Scholar] [CrossRef]
- Han, J.H.; Choi, D.J.; Park, S.U.; Hong, S.K. Hyperparameter Optimization Using a Genetic Algorithm Considering Verification Time in a Convolutional Neural Network. J. Electr. Eng. Technol. 2020, 15, 721–726. [Google Scholar] [CrossRef]
- Cho, H.; Kim, Y.; Lee, E.; Choi, D.; Lee, Y.; Rhee, W. Basic Enhancement Strategies When Using Bayesian Optimization for Hyperparameter Tuning of Deep Neural Networks. IEEE Access 2020, 8, 52588–52608. [Google Scholar] [CrossRef]
- Erlöv, T.; Jansson, T.; Persson, H.W.; Cinthio, M. Scatterer size estimation using the center frequency assessed from ultrasound time domain data. J. Acoust. Soc. Am. 2016, 140, 2352–2357. [Google Scholar] [CrossRef]
- Douglass, A.C.S.; Sparkman, D.; Harley, J.B. Segmentation of Hidden Delaminations with Pitch–Catch Ultrasonic Testing and Agglomerative Clustering. J. Nondestruct. Eval. 2020, 39, 8. [Google Scholar] [CrossRef]
- Zheng, S.; Zhang, S.; Luo, Y.; Xu, B.; Hao, W. Nondestructive analysis of debonding in composite/rubber/rubber structure using ultrasonic pulse-echo method. Nondestruct. Test. Eval. 2020, 36, 515–527. [Google Scholar] [CrossRef]
- Yang, X.; Fei, C.; Li, D.; Sun, X.; Hou, S.; Chen, J.; Yang, Y. Multi-layer polymer-metal structures for acoustic impedance matching in high-frequency broadband ultrasonic transducers design. Appl. Acoust. 2020, 160, 107123. [Google Scholar] [CrossRef]
- Tran, P.; Wu, C.; Saleh, M.; Bortolan Neto, L.; Nguyen-Xuan, H.; Ferreira, A.J.M. Composite structures subjected to underwater explosive loadings: A comprehensive review. Compos. Struct. 2021, 263, 113684. [Google Scholar] [CrossRef]
- Wertz, J.; Homa, L.; Lesthaeghe, T.; Aldrin, J. Classification of Composite Delaminations via Pitch-Catch Phased Array Ultrasound. J. Nondestruct. Eval. 2022, 41, 7. [Google Scholar] [CrossRef]
- Angelov, G.; Rusev, R.; Nikolov, D.; Rusev, R. Identifying of Delamination in Integrated Circuits using Surface Acoustic Microscopy. In Proceedings of the 2021 30th International Scientific Conference Electronics ET, Sozopol, Bulgaria, 15–17 September 2021. [Google Scholar] [CrossRef]
- Marhenke, T.; Neuenschwander, J.; Furrer, R.; Twiefel, J.; Hasener, J.; Niemz, P.; Sanabria, S.J. Modeling of delamination detection utilizing air-coupled ultrasound in wood-based composites. NDT E Int. 2018, 99, 1–12. [Google Scholar] [CrossRef]
- Islam, M.M.; Huang, H. Detecting severity of delamination in a lap joint using S-parameters. Smart Mater. Struct. 2018, 27, 035006. [Google Scholar] [CrossRef]
- Tian, F.; Hao, Y.; Zou, Z.; Zheng, Y.; He, W.; Yang, L.; Li, L. An ultrasonic pulse-echo method to detect internal defects in epoxy composite insulation. Energies 2019, 12, 4804. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.L.; Liu, Z.; Lai, S.K.; Luo, L.Z.; Dai, J.G. Debonding Detection in the Grouted Joints of Precast Concrete Shear Walls Using Impact-Echo Method. J. Nondestruct. Eval. 2021, 40, 50. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Boding State | Formula |
|---|---|
| Perfect bonding | |
| Debonding | |
| Imperfect Bonding |
| Debonded Section of Coated Concrete Specimen | |||||
|---|---|---|---|---|---|
| TOF of A0 | Phase of A0 | CF of A0 | TOF of A1 | Phase of A1 | CF of A1 |
| (µs) | (°) | (MHz) | (µs) | (°) | (MHz) |
| 74.93 | 90 | 3.58 | 75.65 | −90 | 3.12 |
| Bonded section of coated concrete specimen | |||||
| 75.16 | 90 | 3.58 | 75.97 | 90 | 3.50 |
| Debonded Section of Coated Concrete Specimen | ||
|---|---|---|
| CWT Ratio of A1/A0 | Phase Difference | CF Ratio of A1/A0 |
| (Unitless) | (°) | (Unitless) |
| 1.13 | 180 | 0.87 |
| Bonded section of coated concrete specimen | ||
| 0.27 | 0 | 0.98 |
| Hyperparameter | Range |
|---|---|
| Neurons | [3:100] |
| Learning rate | [0.01:1] |
| Batch size | [5:100] |
| Epochs | [20:200] |
| Number of Hidden Layers | [1:5] |
| Dropout rate | [0:0.3] |
| Optimization function | SGD, Adam, RMSprop, Adadelta, Adagrad, Adamax, Adam |
| Activation function | ReLu, Sigmoid, SoftPlus, SoftSign, Tanh, Selu, Elu, Exponential |
| Hyperparameter | Optimal Value |
|---|---|
| Neurons in each layer | 11 |
| Learning rate | 0.08 |
| Batch size | 5 |
| Epochs | 60 |
| Number of hidden layers | 5 |
| Dropout rate | 0.01 |
| Optimization function | Adadelta |
| Activation function | ReLu |
| Training Set | Validation Set | Test Set | Total |
|---|---|---|---|
| 638 | 160 | 794 | 1592 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malikov, A.K.u.; Kim, Y.H.; Yi, J.-H.; Kim, J.; Zhang, J.; Cho, Y. Neural-Network-Based Ultrasonic Inspection of Offshore Coated Concrete Specimens. Coatings 2022, 12, 773. https://doi.org/10.3390/coatings12060773
Malikov AKu, Kim YH, Yi J-H, Kim J, Zhang J, Cho Y. Neural-Network-Based Ultrasonic Inspection of Offshore Coated Concrete Specimens. Coatings. 2022; 12(6):773. https://doi.org/10.3390/coatings12060773
Chicago/Turabian StyleMalikov, Azamatjon Kakhramon ugli, Young H. Kim, Jin-Hak Yi, Jeongnam Kim, Jiannan Zhang, and Younho Cho. 2022. "Neural-Network-Based Ultrasonic Inspection of Offshore Coated Concrete Specimens" Coatings 12, no. 6: 773. https://doi.org/10.3390/coatings12060773
APA StyleMalikov, A. K. u., Kim, Y. H., Yi, J.-H., Kim, J., Zhang, J., & Cho, Y. (2022). Neural-Network-Based Ultrasonic Inspection of Offshore Coated Concrete Specimens. Coatings, 12(6), 773. https://doi.org/10.3390/coatings12060773