
Recent Advances, Future Trends, Applications and Challenges of Internet of Underwater Things (IoUT): A Comprehensive Review


 , ,
, , 

Abstract
1. Introduction
2. IoUT Architecture
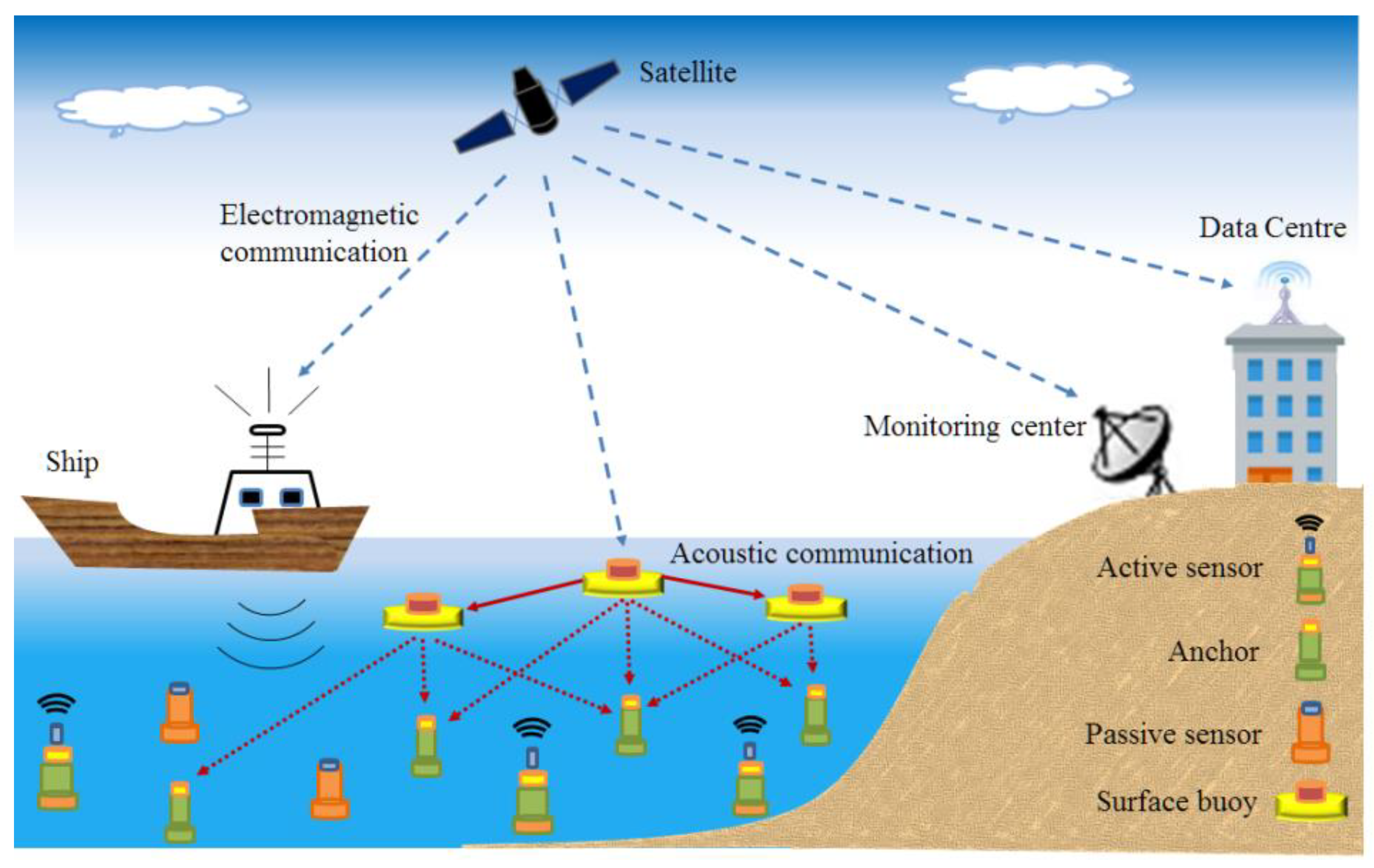
- Endpoint nodes are devices including sensors, cameras, hydrophones, actuators, and radio or acoustic tags.
- Mid-layer nodes are devices such as modems, gateways, repeaters, and relays.
- Sink nodes are located on buoys, ships, satellites, and at on-shore base stations. Generally, IoUT systems are based on several heterogeneous objects; hence, it is very important to introduce a flexible, layered system. Every layer has distinct capabilities in terms of scalability and operation. IoUT architecture is usually based on three layers, as presented in Figure 4.
- Perception layer: This layer is the lowest layer in the IoUT system architecture. It is based on devices such as monitoring stations, UAVs, surface links, GPS sensors, and energy harvesting elements. The basic tasks of actuators and sensors are to collect data and initiate actuation. The key functions of this layer are to obtain water parameters, to perform water quality monitoring, and to collect information about underwater objects or aquatic species.
- Network layer: This layer obtains data from the perception layer and processes it. It is based on wired and wireless links, remotely operated stations, a cloud platform, and the internet. It performs bi-directional data packet handling through internet protocols and data routing.
- Application layer: This layer is responsible for analyzing data using GUI-empowered front-end services. Its main objective is to identify sensors, i.e., their location, id, number, and type. Data collection includes sensing, tracking, storing and streaming information.
3. Underwater Robot Technologies and Acoustic Sensing
3.1. Underwater Robots
3.2. Tools and Technologies for System Implementation in the IoUT
3.3. Underwater Acoustic Sensors
3.3.1. Underwater Acoustic Positioning Sensors
3.3.2. Underwater Acoustic Ranging/Imaging Sensors
4. Recent Developments in the IoUT
4.1. Communication in IoUT
4.2. Role of AUV in IoUT
4.2.1. Data Collection
4.2.2. Localization
4.2.3. Void Challenges
4.2.4. Topology Optimization
4.2.5. Multi-AUV-Aided Data Collection for Mission Critical IoUT
4.3. Sea Gliders
4.4. Cabled Underwater Observatory Systems
4.5. Satellite Oceanography
5. Integration of the IoUT with Other Technologies
5.1. Edge Computing in IoUT
5.2. Data Analysis in the IoUT
5.3. OWC in IoUT
5.4. Blockchain in IoUT
5.5. Intelligent Reflecting Surfaces in IoUT
6. Applications of the IoUT
6.1. Aquatic Animal Tracking
6.2. Environmental Monitoring
Water Quality Monitoring
6.3. Military
6.4. Powering Underwater Devices [59,60]
6.5. Underwater Pipeline Monitoring
6.6. Smart Ocean
6.7. AUV-Assisted Underwater Observation [94]
6.8. Disaster Prevention
6.9. Aquaculture
6.10. Harbor Monitoring
7. IoUT Challenges, Solutions, and Future Research Directions
7.1. Communication
7.2. Energy Storage and Consumption
7.3. Mobility and Reliability
7.4. Transmission Medium
7.5. Latency
7.6. Sparse and High-Maintenance Sensing Devices in the IoUT
7.7. The IoUT for Humanitarian Applications
7.8. IoUT Security and Privacy Issues
7.9. Reliable Multihop Transmission Control Protocol
7.10. Lack of Standardization
Acoustic Protocol for the IoUT
7.11. Link Misalignment in Optical IoUT
7.12. Localization
7.13. Relay Placement in the IoUT
7.14. Unreliable Channel Conditions [41]
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Domingo, M.C. An overview of the internet of underwater things. J. Netw. Comput. Appl. 2012, 35, 1879–1890. [Google Scholar] [CrossRef]
- Yan, J.; Gong, Y.; Chen, C.; Luo, X.; Guan, X. AUV-aided localization for Internet of underwater things: A reinforcement-learning-based method. IEEE Internet Things J. 2020, 7, 9728–9746. [Google Scholar] [CrossRef]
- Khan, M.T.R.; Ahmed, S.H.; Kim, D. AUV-aided energy-efficient clustering in the Internet of underwater things. IEEE Trans. Green Commun. Netw. 2019, 3, 1132–1141. [Google Scholar] [CrossRef]
- Morozs, N.; Mitchell, P.D.; Diamant, R. Scalable adaptive networking for the Internet of underwater things. IEEE Internet Things J. 2020, 7, 10023–10037. [Google Scholar] [CrossRef]
- Kao, C.C.; Lin, Y.S.; Wu, G.D.; Huang, C.J. A comprehensive study on the internet of underwater things: Applications, challenges, and channel models. Sensors 2017, 17, 1477. [Google Scholar] [CrossRef]
- Gopinath, M.P.; Tamizharasi, G.S.; Kavisankar, L.; Sathyaraj, R.; Karthi, S.; Aarthy, S.L.; Balamurugan, B. A secure cloud-based solution for real-time monitoring and management of Internet of underwater things (IOUT). Neural Comput. Appl. 2019, 31, 293–308. [Google Scholar] [CrossRef]
- UniversitySeoul, K. GUID for Mobility First Architecture Supporting IoUT. Int. J. Multimed. Ubiquitous Eng. 2014, 9, 93–110. [Google Scholar]
- Gjanci, P.; Petrioli, C.; Basagni, S.; Phillips, C.A.; Bölöni, L.; Turgut, D. Path finding for maximum value of information in multi-modal underwater wireless sensor networks. IEEE Trans. Mob. Comput. 2017, 17, 404–418. [Google Scholar] [CrossRef]
- Yan, J.; Yang, X.; Luo, X.; Chen, C. Energy-efficient data collection over AUV-assisted underwater acoustic sensor network. IEEE Syst. J. 2018, 12, 3519–3530. [Google Scholar]
- Fang, Z.; Wang, J.; Jiang, C.; Zhang, Q.; Ren, Y. AoI inspired collaborative information collection for AUV assisted internet of underwater things. IEEE Internet Things J. 2021, 8, 14559–14571. [Google Scholar] [CrossRef]
- Abdillah, A.F.; Berlian, M.H.; Panduman, Y.Y.F.; Akbar, M.W.; Afifah, M.A.; Tjahjono, A.; Sukaridhoto, S.; Sasaki, S. Design and development of low cost coral monitoring system for shallow water based on internet of underwater things. J. Telecommun. Electron. Comput. Eng. (JTEC) 2017, 9, 97–101. [Google Scholar]
- Al-Bzoor, M.; Al-assem, E.; Alawneh, L.; Jararweh, Y. Autonomous underwater vehicles support for enhanced performance in the Internet of underwater things. Trans. Emerg. Telecommun. Technol. 2021, 32, e4225. [Google Scholar] [CrossRef]
- Menaka, D.; Gauni, S.; Manimegalai, C.T.; Kalimuthu, K. Vision of IoUT: Advances and future trends in optical wireless communication. J. Opt. 2021, 50, 439–452. [Google Scholar] [CrossRef]
- Rizvi, S.S.H.; Zubair, M.; Ahmad, J.; Hashmani, M.; Khan, M.W. Wireless Communication as a Reshaping Tool for Internet of Things (IoT) and Internet of Underwater Things (IoUT) Business in Pakistan: A Technical and Financial Review. Wirel. Pers. Commun. 2021, 116, 1087–1105. [Google Scholar] [CrossRef]
- Petrioli, C.; Petroccia, R.; Spaccini, D.; Vitaletti, A.; Arzilli, T.; Lamanna, D.; Galizial, A.; Renzi, E. The SUNRISE GATE: Accessing the SUNRISE federation of facilities to test solutions for the Internet of Underwater Things. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014. [Google Scholar]
- Luo, C.; Ma, B.; Chen, F.; Guan, Q.; Yu, H.; Ji, F. Multicore-processor based software-defined communication/network platform for underwater Internet of things. Sensors 2019, 19, 5168. [Google Scholar] [CrossRef] [PubMed]
- Emrecan, D.; Jiacheng, S.; Anh, D.; Neil, D.; Raffaele, G.; Bernard, H.; Flavius, P.; Guofeng, C.; Cristian, C.; Sayedamirhossein, T.; et al. The seanet project: Toward a programmable internet of underwater things. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018. [Google Scholar]
- Technology Enabler for Internet of Underwater Things Applications. Available online: https://cordis.europa.eu/project/id/957008 (accessed on 1 March 2022).
- Deep Sea Internet or Internet of Underwater Things to Connect the Underwater World of Sensors, Unmanned Underwater Vehicles, Ships and Submarine. Available online: https://idstch.com/military/navy/deep-sea-internet-or-internet-of-underwater-things-iout-to-connect-the-underwater-world/ (accessed on 15 March 2022).
- Senses Lab. SENSELab Members. 2021. Available online: http://senseslab.di.uniroma1.it/team (accessed on 5 March 2022).
- Argo. Available online: https://argo.ucsd.edu/ (accessed on 3 April 2022).
- Celik, A.; Saeed, N.; Shihada, B.; Al-Naffouri, T.Y.; Alouini, M.S. A software-defined opto-acoustic network architecture for internet of underwater things. IEEE Commun. Mag. 2020, 58, 88–94. [Google Scholar] [CrossRef]
- Yisa, A.G.; Dargahi, T.; Belguith, S.; Hammoudeh, M. Security challenges of Internet of Underwater Things: A systematic literature review. Trans. Emerg. Telecommun. Technol. 2021, 32, e4203. [Google Scholar] [CrossRef]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater wireless sensor networks: A survey on enabling technologies, localization protocols, and internet of underwater things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Delphin Raj, K.M.; Lee, J.; Ko, E.; Shin, S.Y.; Namgung, J.I.; Yum, S.H.; Park, S.H. Underwater Network Management System in Internet of Underwater Things: Open Challenges, Benefits, and Feasible Solution. Electronics 2020, 9, 1142. [Google Scholar]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An energy efficient routing protocol for UWSNs in the internet of underwater things. IEEE Sens. J. 2015, 16, 4072–4082. [Google Scholar] [CrossRef]
- Berlian, M.H.; Sahputra, T.E.R.; Ardi, B.J.W.; Dzatmika, L.W.; Besari, A.R.A.; Sudibyo, R.W.; Sukaridhoto, S. Design and implementation of smart environment monitoring and analytics in real-time system framework based on internet of underwater things and big data. In Proceedings of the 2016 International Electronics Symposium (IES), Bali, Indonesia, 29–30 September 2016; pp. 403–408. [Google Scholar]
- Liou, E.C.; Kao, C.C.; Chang, C.H.; Lin, Y.S.; Huang, C.J. Internet of underwater things: Challenges and routing protocols. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 1171–1174. [Google Scholar]
- Nayyar, A.; Ba, C.H.; Duc, N.P.C.; Binh, H.D. Smart-IoUT 1.0: A smart aquatic monitoring network based on Internet of Underwater Things (IoUT). In International Conference on Industrial Networks and Intelligent Systems; Springer: Cham, Switzerland, 2018; pp. 191–207. [Google Scholar]
- Xu, G.; Shi, Y.; Sun, X.; Shen, W. Internet of things in marine environment monitoring: A review. Sensors 2019, 19, 1711. [Google Scholar] [CrossRef]
- Khalil, R.; Babar, M.; Jan, T.; Saeed, N. Towards the Internet of underwater things: Recent developments and future challenges. IEEE Consum. Electron. Mag. 2020, 10, 32–37. [Google Scholar] [CrossRef]
- Su, R.; Ju, M.; Gong, Z.; Li, C.; Venkatesan, R. A Review of Channel Modeling Techniques for Internet of Underwater Things. In Proceedings of the 2021 International Wireless Communications and Mobile Computing (IWCMC), Harbin, China, 28 June–2 July 2021; pp. 1754–1759. [Google Scholar]
- Jahanbakht, M.; Xiang, W.; Hanzo, L.; Azghadi, M.R. Internet of underwater Things and big marine data analytics—A comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 23, 904–956. [Google Scholar] [CrossRef]
- Qiu, T.; Zhao, Z.; Zhang, T.; Chen, C.; Chen, C.P. Underwater Internet of Things in smart ocean: System architecture and open issues. IEEE Trans. Ind. Inform. 2019, 16, 4297–4307. [Google Scholar] [CrossRef]
- Hou, X.; Wang, J.; Fang, Z.; Zhang, X.; Song, S.; Zhang, X.; Ren, Y. Machine-Learning-Aided Mission-Critical Internet of Underwater Things. IEEE Netw. 2021, 35, 160–166. [Google Scholar] [CrossRef]
- Krishnaraj, N.; Elhoseny, M.; Thenmozhi, M.; Selim, M.M.; Shankar, K. Deep learning model for real-time image compression in Internet of Underwater Things (IoUT). J. Real-Time Image Process. 2020, 17, 2097–2111. [Google Scholar] [CrossRef]
- Zhao, Q.; Peng, Z.; Hong, X. A named data networking architecture implementation to Internet of Underwater Things. In Proceedings of the International Conference on Underwater Networks & Systems, Atlanta, GA, USA, 23–25 October 2019; pp. 1–8. [Google Scholar]
- Mohammadi, R.; Nazari, A.; Nassiri, M.; Conti, M. An SDN-based framework for QoS routing in internet of underwater things. Telecommun. Syst. 2021, 78, 253–266. [Google Scholar] [CrossRef]
- Cong, Y.; Gu, C.; Zhang, T.; Gao, Y. Underwater robot sensing technology: A survey. Fundam. Res. 2021, 1, 337–345. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Wang, P.; Sun, Z. Realizing underwater communication through magnetic induction. IEEE Commun. Mag. 2015, 53, 42–48. [Google Scholar] [CrossRef]
- Mary, D.R.K.; Ko, E.; Kim, S.G.; Yum, S.H.; Shin, S.Y.; Park, S.H. A Systematic Review on Recent Trends, Challenges, Privacy and Security Issues of Underwater Internet of Things. Sensors 2021, 21, 8262. [Google Scholar] [CrossRef]
- Han, G.; Li, S.; Zhu, C.; Jiang, J.; Zhang, W. Probabilistic neighborhood-based data collection algorithms for 3D underwater acoustic sensor networks. Sensors 2017, 17, 316. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.; Guo, D.; Luo, X.; Guan, X. AUV-aided localization for underwater acoustic sensor networks with current field estimation. IEEE Trans. Veh. Technol. 2020, 69, 8855–8870. [Google Scholar] [CrossRef]
- Jin, Z.; Zhao, Q.; Luo, Y. Routing void prediction and repairing in AUV-assisted underwater acoustic sensor networks. IEEE Access 2020, 8, 54200–54212. [Google Scholar] [CrossRef]
- He, M.; Liu, F.; Miao, Z.; Zhou, H.; Chen, Q. A mechanism of topology optimization for underwater acoustic sensor networks based on autonomous underwater vehicles. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147716686979. [Google Scholar] [CrossRef]
- Lan, H.; Lv, Y.; Jin, J.; Li, J.; Sun, D.; Yang, Z. Acoustical Observation with Multiple Wave Gliders for Internet of Underwater Things. IEEE Internet Things J. 2020, 8, 2814–2825. [Google Scholar] [CrossRef]
- Jiang, S. Marine internet for internetworking in oceans: A tutorial. Future Internet 2019, 11, 146. [Google Scholar] [CrossRef]
- Monterey Bay Aquarium Research Institute. Monterey Accelerated Research System (MARS) Cabled Observator. Available online: https://www.mbari.org/at-sea/cabled-observatory/ (accessed on 15 April 2022).
- Kawaguchi, K.; Kaneko, S.; Nishida, T.; Komine, T. Construction of the DONET real-time seafloor observatory for earthquakes and tsunami monitoring. In Seafloor Observatories; Springer: Berlin/Heidelberg, Germany, 2015; pp. 211–228. [Google Scholar]
- The University of Victoria, Canada. Ocean Networks Canada (OCN). Available online: http://www.oceannetworks.ca (accessed on 20 April 2022).
- European Research Infrastructure Consortium (ERIC). European Multidisciplinary Seafloor and Water Column Observatory (EMSO). Available online: http://emso.eu/ (accessed on 25 April 2022).
- Yu, Y.; Xu, H.; Xu, C. A Sensor Control Model for Cabled Seafloor Observatories in the East China Sea. Sensors 2018, 18, 3027. [Google Scholar] [CrossRef]
- Cai, S.; Zhu, Y.; Wang, T.; Xu, G.; Liu, A.; Liu, X. Data collection in underwater sensor networks based on mobile edge computing. IEEE Access 2019, 7, 65357–65367. [Google Scholar] [CrossRef]
- Liang, M.; Su, X.; Liu, X.; Zhang, X. Intelligent Ocean Convergence Platform Based on IoT Empowered with Edge Computing. J. Internet Technol. 2020, 21, 235–244. [Google Scholar]
- Bhattacharjya, K.; De, D. IoUT: Modelling and simulation of Edge-Drone-based Software-Defined smart Internet of Underwater Things. Simul. Model. Pract. Theory 2021, 109, 102304. [Google Scholar] [CrossRef]
- Addison, P.F.E.; Collins, D.J.; Trebilco, R.; Howe, S.; Bax, N.; van Hedge, P.; Jones, G.; Miloslavich, P.; Roelfsema, C.; Sams, M.; et al. A new wave of marine evidence-based management: Emerging challenges and solutions to transform monitoring, evaluating, and reporting. ICES J. Mar. Sci. 2018, 75, 941–952. [Google Scholar] [CrossRef]
- Li, Z.; Wang, N.; Li, Y.; Sun, X.; Huo, M.; Zhang, H. Collective efficacy of support vector regression with smoothness priority in marine sensor data prediction. IEEE Access 2019, 7, 10308–10317. [Google Scholar] [CrossRef]
- Yan, J.; Meng, Y.; Luo, X.; Guan, X. To Hide Private Position Information in Localization for Internet of Underwater Things. IEEE Internet Things J. 2021, 8, 14338–14354. [Google Scholar] [CrossRef]
- Shen, D.; Tao, L.; Yu, J.; Ye, P.; Sheng, Z.; Zhou, L.; Shi, M.; Mei, S.; Wan, X.; Lian, X.; et al. Disruptive Technology of Building Internet of Underwater Things: Laser-based Underwater Solid-State Lighting. In Proceedings of the 2021 5th IEEE Electron Devices Technology & Manufacturing Conference (EDTM), Chengdu, China, 8–11 April 2021; pp. 1–3. [Google Scholar]
- De Oliveira Filho, J.I.; Trichili, A.; Ooi, B.S.; Alouini, M.S.; Salama, K.N. Toward self-powered Internet of Underwater Things devices. IEEE Commun. Mag. 2020, 58, 68–73. [Google Scholar] [CrossRef]
- Hammi, M.T.; Bellot, P.; Serhrouchni, A. BCTrust: A decentralized authentication blockchain-based mechanism. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Crimmins, D.M.; Patty, C.T.; Beliard, M.A.; Baker, J.; Jalbert, J.C.; Komerska, R.J.; Chappell, S.G.; Blidberg, D.R. Long-endurance test results of the solar-powered AUV system. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–5. [Google Scholar]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent reflecting surface aided wireless communications: A tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Salam, A. Internet of things in water management and treatment. In Internet of Things for Sustainable Community Development; Springer: Cham, Switzerland, 2020; pp. 273–298. [Google Scholar]
- Lakshmikantha, V.; Hiriyannagowda, A.; Manjunath, A.; Patted, A.; Basavaiah, J.; Anthony, A.A. IoT based Smart Water Quality Monitoring System. Glob. Transit. Proc. 2021, 2, 181–186. [Google Scholar] [CrossRef]
- Xu, G.; Shen, W.; Wang, X. Applications of wireless sensor networks in marine environment monitoring: A survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef]
- Myint, C.Z.; Gopal, L.; Aung, Y.L. WSN-based reconfigurable water quality monitoring system in IoT environment. In Proceedings of the 2017 14th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Phuket, Thailand, 27–30 June 2017; pp. 741–744. [Google Scholar]
- Yaroshenko, I.; Kirsanov, D.; Marjanovic, M.; Lieberzeit, P.A.; Korostynska, O.; Mason, A.; Frau, I.; Legin, A. Real-time water quality monitoring with chemical sensors. Sensors 2020, 20, 3432. [Google Scholar] [CrossRef]
- Oshimi, R.; Tabeta, S.; Mizuno, K. Water quality modeling in subtropical shallow waters to predict environmental impacts of ocean thermal energy conversion. J. Mar. Sci. Technol. 2021, 27, 335–347. [Google Scholar] [CrossRef]
- Olatinwo, S.O.; Joubert, T.H. Efficient energy resource utilization in a wireless sensor system for monitoring water quality. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 6. [Google Scholar] [CrossRef]
- Vo, D.T.; Nguyen, X.P.; Nguyen, T.D.; Hidayat, R.; Huynh, T.T.; Nguyen, D.T. A review on the internet of thing (IoT) technologies in controlling ocean environment. Energy Sources Part A Recovery Util. Environ. Eff. 2021. [Google Scholar] [CrossRef]
- Bresnahan, P.J.; Wirth, T.; Martz, T.; Shipley, K.; Rowley, V.; Anderson, C.; Grimm, T. Equipping smart coasts with marine water quality IoT sensors. Results Eng. 2020, 5, 100087. [Google Scholar] [CrossRef]
- Kao, C.C.; Lin, Y.S.; Wu, G.D.; Huang, C.J. A study of applications, challenges, and channel models on the Internet of Underwater Things. In Proceedings of the 2017 International Conference on Applied System Innovation (ICASI), Sapporo, Japan, 13–17 May 2017; pp. 1375–1378. [Google Scholar]
- Khaledi, S.; Mann, H.; Perkovich, J.; Zayed, S. Design of an underwater mine detection system. In Proceedings of the 2014 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 25 April 2014; pp. 78–83. [Google Scholar]
- Cayirci, E.; Tezcan, H.; Dogan, Y.; Coskun, V. Wireless sensor networks for underwater survelliance systems. Ad Hoc Netw. 2006, 4, 431–446. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, X.; Wang, Y.; Wang, H.; Wang, H.; Zhang, S.L.; Zhao, T.; Xu, M.; Wang, Z.L. Flexible Seaweed-Like Triboelectric Nanogenerator as a Wave Energy Harvester Powering Marine Internet of Things. ACS Nano 2021, 15, 15700–15709. [Google Scholar] [CrossRef] [PubMed]
- Guida, R.; Demirors, E.; Dave, N.; Melodia, T. Underwater Ultrasonic Wireless Power Transfer: A Battery-less Platform for the Internet of Underwater Things. IEEE Trans. Mob. Comput. 2020, 21, 1861–1873. [Google Scholar] [CrossRef]
- Shihada, B.; Amin, O.; Bainbridge, C.; Jardak, S.; Alkhazragi, O.; Ng, T.K.; Ooi, B.; Berumen, M.; Alouini, M.-S. Aqua-Fi: Delivering Internet underwater using wireless optical networks. IEEE Commun. Mag. 2020, 58, 84–89. [Google Scholar] [CrossRef]
- Raffaele, G.; Demirors, E.; Dave, N.; Rodowicz, J.; Melodia, T. An acoustically powered battery-less internet of underwater things platform. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018. [Google Scholar]
- Kong, M.; Lin, J.; Guo, Y.; Sun, X.; Sait, M.; Alkhazragi, O.; Kang, C.H.; Holguin-Lerma, J.A.; Kheireddine, M.; Ouhssain, M.; et al. AquaE-lite Hybrid-Solar-Cell Receiver-Modality for Energy-Autonomous Terrestrial and Underwater Internet-of-Things. IEEE Photon-J. 2020, 12, 1–13. [Google Scholar] [CrossRef]
- Guan, Z.; Li, P.; Wen, Y.; Du, Y.; Han, T.; Ji, X. Efficient underwater energy harvesting from bubble-driven pipe flow. Appl. Energy 2021, 295, 116987. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, Z.; Yang, O.; Yuan, W.; Zhou, L.; Yin, X.; Liu, L.; Li, Y.; Wang, Z.L.; Wang, J. Bionic-fin-structured triboelectric nanogenerators for undersea energy harvesting. Adv. Mater. Technol. 2020, 5, 2000531. [Google Scholar] [CrossRef]
- Zhao, T.; Xu, M.; Xiao, X.; Ma, Y.; Li, Z.; Wang, Z.L. Recent progress in blue energy harvesting for powering distributed sensors in ocean. Nano Energy 2021, 88, 106199. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, B.; Mu, C. A comparative study of optimization models for the gas detector placement in process facilities. Comput. Chem. Eng. 2020, 143, 107095. [Google Scholar] [CrossRef]
- Østby, E.; Hellesvik, A.O. Fracture Control–Offshore Pipelines JIP Results from large scale testing of the effect of biaxial loading on the strain capacity of pipes with defects. In Proceedings of the Seventeenth International Offshore and Polar Engineering Conference, Lisbon, Portugal, 1–6 July 2007. [Google Scholar]
- Nonn, A.; Erdelen-Peppler, M.; Wessel, W.; Mahn, D. How Reliable Are the Current Testing Procedures for the Safety Assurance Against Crack Propagation in Seamless Gas Pipelines? In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 45424, p. V04AT02A019. [Google Scholar]
- Li, Y.; Hu, Z. A review of multi-attributes decision-making models for offshore oil and gas facilities decommissioning. J. Ocean. Eng. Sci. 2021, 7, 58–74. [Google Scholar] [CrossRef]
- Hegrenæs, Ø.; Gade, K.; Hagen, O.K.; Hagen, P.E. Underwater transponder positioning and navigation of autonomous underwater vehicles. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–7. [Google Scholar]
- Morales, R.; Keitler, P.; Maier, P.; Klinker, G. An underwater augmented reality system for commercial diving operations. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–8. [Google Scholar]
- Mohamed, N.; Jawhar, I.; Al-Jaroodi, J.; Zhang, L. Monitoring underwater pipelines using sensor networks. In Proceedings of the 2010 IEEE 12th International Conference on High Performance Computing and Communications (HPCC), Melbourne, VIC, Australia, 1–3 September 2010; pp. 346–353. [Google Scholar]
- Loftis, D.; Forrest, D.; Katragadda, S.; Spencer, K.; Organski, T.; Nguyen, C.; Rhee, S. StormSense: A new integrated network of IoT water level sensors in the smart cities of Hampton Roads, VA. Mar. Technol. Soc. J. 2018, 52, 56–67. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Lu, J.; Ding, X.; Jiang, C.; Yang, J.; Shen, J. Design, modeling, control, and experiments for a fish-robot-based IoT platform to enable smart ocean. IEEE Internet Things J. 2021, 8, 9317–9329. [Google Scholar] [CrossRef]
- Hu, C.; Pu, Y.; Yang, F.; Zhao, R.; Alrawais, A.; Xiang, T. Secure and efficient data collection and storage of IoT in smart ocean. IEEE Internet Things J. 2020, 7, 9980–9994. [Google Scholar] [CrossRef]
- Marcelli, M.; Piermattei, V.; Gerin, R.; Brunetti, F.; Pietrosemoli, E.; Addo, S.; Boudaya, L.; Coleman, R.; Nubi, O.A.; Jojannes, R.; et al. Toward the widespread application of low-cost technologies in coastal ocean observing (Internet of Things for the Ocean). Mediterr. Mar. Sci. 2021, 22, 255–269. [Google Scholar] [CrossRef]
- Qin, C.; Du, J.; Wang, J.; Ren, Y. A hierarchical information acquisition system for AUV assisted internet of underwater things. IEEE Access 2020, 8, 176089–176100. [Google Scholar] [CrossRef]
- Robinson, Y.H.; Vimal, S.; Julie, E.G.; Khari, M.; Expósito-Izquierdo, C.; Martínez, J. Hybrid optimization routing management for autonomous underwater vehicle in the internet of underwater things. Earth Sci. Inform. 2021, 14, 441–456. [Google Scholar] [CrossRef]
- Jenkyns, R. NEPTUNE Canada: Data integrity from the seafloor to your (Virtual) Door. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–7. [Google Scholar]
- Marin-Perez, R.; García-Pintado, J.; Gómez, A.S. A real-time measurement system for long-life flood monitoring and warning applications. Sensors 2012, 12, 4213–4236. [Google Scholar] [CrossRef]
- Casey, K.; Lim, A.; Dozier, G. A sensor network architecture for tsunami detection and response. Int. J. Distrib. Sens. Netw. 2008, 4, 27–42. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. Underwater sensor networks for smart disaster management. IEEE Consum. Electron. Mag. 2020, 9, 107–114. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, K.; Chao, L.; Li, D.; Tian, X.; Bao, H.; Chen, G.; Xia, Y. Exploring the utility of radar and satellite-sensed precipitation and their dynamic bias correction for integrated prediction of flood and landslide hazards. J. Hydrol. 2021, 603, 126964. [Google Scholar] [CrossRef]
- Tian, H.; Huang, N.; Niu, Z.; Qin, Y.; Pei, J.; Wang, J. Mapping winter crops in China with multi-source satellite imagery and phenology-based algorithm. Remote Sens. 2019, 11, 820. [Google Scholar] [CrossRef]
- Tian, H.; Pei, J.; Huang, J.; Li, X.; Wang, J.; Zhou, B.; Qin, Y.; Wang, L. Garlic and winter wheat identification based on active and passive satellite imagery and the google earth engine in northern china. Remote Sens. 2020, 12, 3539. [Google Scholar] [CrossRef]
- Zhou, G.; Bao, X.; Ye, S.; Wang, H.; Yan, H. Selection of optimal building facade texture images from UAV-based multiple oblique image flows. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1534–1552. [Google Scholar] [CrossRef]
- Fukae, K.; Imai, T.; Yamabe, S.; Arai, K.; Kobayashi, T. Development of Observation Device with Multi Sensor Platform for Underwater Aquaculture Cages. In Proceedings of the 2021 IEEE 45th Annual Computers, Software, and Applications Conference (COMPSAC), Madrid, Spain, 12–16 July 2021; pp. 1633–1638. [Google Scholar]
- Zhou, G.; Zhou, X.; Song, Y.; Xie, D.; Wang, L.; Yan, G.; Hu, M.; Liu, B.; Shang, W.; Gong, C.; et al. Design of supercontinuum laser hyperspectral light detection and ranging (LiDAR) (SCLaHS LiDAR). Int. J. Remote Sens. 2021, 42, 3731–3755. [Google Scholar] [CrossRef]
- Zhou, G.; Li, C.; Zhang, D.; Liu, D.; Zhou, X.; Zhan, J. Overview of underwater transmission characteristics of oceanic LiDAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8144–8159. [Google Scholar] [CrossRef]
- Zhou, G.; Li, W.; Zhou, X.; Tan, Y.; Lin, G.; Li, X.; Deng, R. An innovative echo detection system with STM32 gated and PMT adjustable gain for airborne LiDAR. Int. J. Remote Sens. 2021, 42, 9187–9211. [Google Scholar] [CrossRef]
- Nakano, M.; Shiba, H.; Kawahara, A.; Tabuchi, T.; Kobayashi, M.; Yagi, M. Harbor Monitoring Network System for Detecting Suspicious Objects Approaching Critical Facilities in Coastal Areas. NEC Tech. J. 2015, 9, 111–114. [Google Scholar]
- Luo, H.; Wu, K.; Ruby, R.; Liang, Y.; Guo, Z.; Ni, L.M. Software-defined architectures and technologies for underwater wireless sensor networks: A survey. IEEE Commun. Surv. Tutor. 2018, 20, 2855–2888. [Google Scholar] [CrossRef]
- Park, S.; Jo, O. Intelligent Handover Prediction Based on Locational Priority with Zero Scanning for the Internet of Underwater Things. IEEE Access 2020, 8, 186291–186303. [Google Scholar] [CrossRef]
- Salami, A.F.; Dogo, E.M.; Makaba, T.; Adedokun, E.A.; Muazu, M.B.; Sadiq, B.O.; Salawudeen, A.T. A decade bibliometric analysis of underwater sensor network research on the Internet of Underwater Things: An African perspective. In Trends in Cloud-Based IoT; Springer: Berlin/Heidelberg, Germany, 2020; pp. 147–182. [Google Scholar]
- Qadar, R.; Bin Qaim, W.; Nurmi, J.; Tan, B. Effects of multipath attenuation in the optical communication-based internet of underwater things. Sensors 2020, 20, 6201. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Liu, L. Sender-receiver role-based energy-aware scheduling for Internet of Underwater Things. IEEE Trans. Emerg. Top. Comput. 2016, 7, 324–336. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Jiang, C.; Du, J.; Hou, X.; Ren, Y. Heterogeneous Multi-AUV Aided Green Internet of Underwater Things. In Proceedings of the ICC 2021-IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Coutinho, R.W.; Boukerche, A. Topology control for internet of underwater things. In Proceedings of the 15th ACM International Symposium on QoS and Security for Wireless and Mobile Networks, Miami Beach, FL, USA, 25–29 November 2019; pp. 79–83. [Google Scholar]
- Urunov, K.; Namgung, J.I.; Park, S.H. Custody Transfer of Bundle layer in Security Mechanism for Under water Internet of Things (UIoT). J. Korea Multimed. Soc. 2015, 18, 506–523. [Google Scholar] [CrossRef]
- Uddin, M.A.; Stranieri, A.; Gondal, I.; Balasurbramanian, V. A lightweight blockchain based framework for underwater IoT. Electronics 2019, 8, 1552. [Google Scholar] [CrossRef]
- Yazdinejad, A.; Parizi, R.M.; Srivastava, G.; Dehghantanha, A.; Choo, K.K.R. Energy efficient decentralized authentication in internet of underwater things using blockchain. In Proceedings of the 2019 IEEE Globecom Workshops (GC Wkshps), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Qureshi, B.; Aziz, S.A.; Wang, X.; Hawbani, A.; Alsamhi, S.H.; Qureshi, T.; Naji, A. A state-of-the-art survey on wireless rechargeable sensor networks: Perspectives and challenges. Wirel. Netw. 2022, 28, 3019–3043. [Google Scholar] [CrossRef]
- Lv, Z.; Chen, D.; Feng, H.; Wei, W.; Lv, H. Artificial intelligence in underwater digital twins sensor networks. ACM Trans. Sens. Netw. (TOSN) 2022, 18, 1–27. [Google Scholar] [CrossRef]
- Sun, W.; Lv, X.; Qiu, M. Distributed estimation for stochastic Hamiltonian systems with fading wireless channels. IEEE Trans. Cybern. 2020, 52, 4897–4906. [Google Scholar] [CrossRef]
- Cao, K.; Ding, H.; Wang, B.; Lv, L.; Tian, J.; Wei, Q.; Gong, F. Enhancing physical layer security for IoT with non-orthogonal multiple access assisted semi-grant-free transmission. IEEE Internet Things J. 2022, 9, 24669–24681. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Zhou, B.; Fu, H. Multi-dimensional prediction method based on Bi-LSTMC for ship roll. Ocean Eng. 2021, 242, 110106. [Google Scholar] [CrossRef]
- Potter, J.; Alves, J.; Green, D.; Zappa, G.; Nissen, I.; McCoy, K. The JANUS underwater communications standard. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014. [Google Scholar]
- Khalil, R.A.; Babar, M.I.; Saeed, N.; Jan, T.; Cho, H.S. Effect of link misalignment in the optical-Internet of underwater things. Electronics 2020, 9, 646. [Google Scholar] [CrossRef]
- Al-Bzoor, M.; Musa, A.; Alzoubi, K.; Gharaibeh, T. A Directional Selective Power Routing Protocol for the Internet of Underwater Things. Wirel. Commun. Mob. Comput. 2022, 2022, 3846621. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M.; Zhang, S.; Zheng, R.; Lan, J. Node Dynamic Localization and Prediction Algorithm for Internet of Underwater Things. IEEE Internet Things J. 2021, 9, 5380–5390. [Google Scholar] [CrossRef]
- Khalil, R.A.; Saeed, N. Optimal relay placement in magnetic induction-based Internet of underwater things. IEEE Sens. J. 2020, 21, 821–828. [Google Scholar] [CrossRef]
- Yan, J.; Jiao, H.; Pu, W.; Shi, C.; Dai, J.; Liu, H. Radar sensor network resource allocation for fused target tracking: A brief review. Inf. Fusion 2022, 86–87, 104–115. [Google Scholar] [CrossRef]
- Sui, T.; Marelli, D.; Sun, X.; Fu, M. Multi-sensor state estimation over lossy channels using coded measurements. Automatica 2020, 111, 108561. [Google Scholar] [CrossRef]
- Du, H.; Deng, Y.; Xue, J.; Meng, D.; Zhao, Q.; Xu, Z. Robust Online CSI Estimation in a Complex Environment. IEEE Trans. Wirel. Commun. 2022, 21, 8322–8336. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics and Issues | IoUT |
|---|---|
| Deployment | Mostly three dimensional |
| Transmission source | Acoustic signals |
| Transmission distance | ~10 km |
| Transmission rate | ~10’s of kbps |
| Propagation speed | 1500 m/s |
| Mobility | Controlled with AUVs, uncontrolled with water current |
| Reliability | Low |
| Delay | Long |
| Energy consumption | High |
| Device expense | High |
| Bandwidth | Low |
| Localization techniques | Expensive |
| Reference | Year | Research Contribution |
|---|---|---|
| [26] | 2015 | This article introduces a routing protocol, the “energy efficient enhanced channel-aware routing protocol” (ECARP), for use with UWSNs in the IoUT. The protocol would help to substantially reduce the cost of communications and enhance the network capacity. |
| [27] | 2016 | This study proposes a smart system using the IoUT and big data to analyze data received by portable sensors regarding water pH, conductivity, salinity, and temperature. |
| [5] | 2017 | This study discusses the differences between (terrestrial) WSNs and UWSNs. It also outlines channel models for the IoUT and their challenges and applications. |
| [28] | 2018 | This article addresses routing protocols for the IoUT, discussing the challenges they face and the relationships among them. |
| [29] | 2018 | This article focuses on IoUT system design and the challenges faced. It proposes a new prototype, “Smart IoUT 1.0”, which can sense and gather ocean data. |
| [30] | 2019 | This study addresses the use of the IoT by underwater monitoring and environmental protection applications. It also discusses the application of big data, opportunities, and associated challenges. |
| [6] | 2019 | This article introduces a cloud-based platform for the real-time control and monitoring of smart cities via the IoUT. The proposed system ensures reduced energy consumption and enhanced data transmission. |
| [23] | 2020 | A systematic study which outlines future research directions to preserve security and privacy in UWSNs and the IoUT. |
| [25] | 2020 | This study comprehensively discusses the opportunities, as well as the challenges and associated solutions, of the IoUT in order to assist scientists and industrial players in exploring these areas. |
| [31] | 2020 | This study outlines technological developments in communication, localization, consumer electronics, and the IoUT. It also addresses critical challenges facing the design and implementation of the IoUT. |
| [32] | 2021 | In this review study, researchers discuss channel models for the IoUT. They survey different models including the ray-theoretical model, the parabolic equation model, parabolic equations, multipath expansion, and the fast-field model. |
| [33] | 2021 | This study discusses the IoUT, Big Marine Data (BMD), and the relationship between the two. It also outlines tools, techniques, and state-of-the-art applications of the IoUT. Moreover, it examines current machine learning (ML) approaches for BMD analysis. |
| Reference | System Architecture, Layers | Research Contribution |
|---|---|---|
| [1] | Perception, network and application layer | The first ever IoUT architecture was proposed in this study. It also provides technical perspectives of the proposed architecture. |
| [6] | Cloud-based IoUT architecture | The proposed system addresses abovewater security challenges. It uses cloud-based monitoring centers to outperform traditional IoUT base stations. It is based on a monitoring center, sensors, sinks etc. |
| [21] | Software-Defined Opto-Acoustic Network Architecture | A hybrid opto-acoustic IoUT architecture is presented in this study. The proposed system provides the benefits of both acoustic and optical components. |
| [34] | Sensing, communication, fusion, networking and application layer | This study discusses system architecture along with fog computing, cloud computing, and AI. |
| [35] | Future maritime network architecture | The article suggests a maritime network architecture using the ML algorithm for data sensing, transmission, and processing. |
| [36] | Perception, network and application layer | This study proposes a deep learning approach for image compression in real-time for the IoUT. |
| [37] | Named Data Networking (NDN) architecture | In this work, the authors propose a Named Data Networking (NDN) architecture to aid in the effective, secure, and simplified deployment of the IoUT. |
| [38] | Software-defined networking (SDN) architecture | A new software defined networking (SDN) architecture is proposed in this study which ensures reliable connectivity between network objects for QoS enhancement. |
| Characteristics | MI | Optical | RF | Acoustic |
|---|---|---|---|---|
| Transmission power | 10−8 watts (W) | Megawatts (MW) | Megawatts (MW) | >10 W |
| Communication range, purpose | Deep-sea underground communication | Short range | Surface water communication | Long range |
| Bandwidth | MHz | ≤150 MHz | MHz | 1–100 kHz |
| Channel dependency | Conductivity | Scattering, turbidity, attenuation | Conductivity | Salinity, Doppler spread, Pressure, temperature |
| Antenna size | 0.1 s | 0.1 s | 0.5 s | 0.1 s |
| Frequency band | - | 5 × 1014 Hz | 30–300 Hz | 10–15 kHz |
| Data rate | Mbps | Gbps | Mbps | Kbps |
| Communication range | 10–100 m | 10–100 m | 10 m | km |
| Channel speed | 3 × 108 m/s | 3 × 108 m/s | 3 × 108 m/s | 1500 m/s |
| Parameters | TWSNs | UWSNs |
|---|---|---|
| Link reliability | Dependent to application | Low |
| Nodes mobility | Dependent to application | High |
| Recharging | Dependent to application | Difficulty |
| Transmission speed | ~250 kbps | ~10 kbps |
| Transmission range | 10–100 m | 100 m–10 km |
| Propagation speed | 300,000,000 m/s | 1200–1500 m/s |
| Transmission media | RF waves | Acoustic waves |
| Power source | Solar, battery | Battery |
| Propagation delay | Low | High |
| Device mobility | Static and mobile | Static and mobile |
| Location error rate | Low | High |
| Signal bandwidth | High | Low |
| Anchor | GPS-based | AUV |
| Noise interference | Low | High |
| Efficiency | High | Low |
| Dynamic topology operation | Low | High |
| Energy consumption | Low | Very high |
| Characteristics | MI | Optical | RF | Acoustic |
|---|---|---|---|---|
| Magnetic induction | Mb/s | 101 m | High data rate | Short transmission distance |
| Visible light communication (VLC) | 100 Mb/s | 102 m | Low cost and high data rate | High scattering |
| Radio waves | Mb/s | 102 m | Low consumption and high data rate | Multipath interference, short transmission distance |
| Channel dependency | Conductivity | Scattering, turbidity, attenuation | Conductivity | Salinity, Doppler spread, Pressure, temperature |
| Acoustic waves | kb/s | 103 m | Short distance and low attenuation | Interference, low data rate |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohsan, S.A.H.; Li, Y.; Sadiq, M.; Liang, J.; Khan, M.A. Recent Advances, Future Trends, Applications and Challenges of Internet of Underwater Things (IoUT): A Comprehensive Review. J. Mar. Sci. Eng. 2023, 11, 124. https://doi.org/10.3390/jmse11010124
Mohsan SAH, Li Y, Sadiq M, Liang J, Khan MA. Recent Advances, Future Trends, Applications and Challenges of Internet of Underwater Things (IoUT): A Comprehensive Review. Journal of Marine Science and Engineering. 2023; 11(1):124. https://doi.org/10.3390/jmse11010124
Chicago/Turabian StyleMohsan, Syed Agha Hassnain, Yanlong Li, Muhammad Sadiq, Junwei Liang, and Muhammad Asghar Khan. 2023. "Recent Advances, Future Trends, Applications and Challenges of Internet of Underwater Things (IoUT): A Comprehensive Review" Journal of Marine Science and Engineering 11, no. 1: 124. https://doi.org/10.3390/jmse11010124
APA StyleMohsan, S. A. H., Li, Y., Sadiq, M., Liang, J., & Khan, M. A. (2023). Recent Advances, Future Trends, Applications and Challenges of Internet of Underwater Things (IoUT): A Comprehensive Review. Journal of Marine Science and Engineering, 11(1), 124. https://doi.org/10.3390/jmse11010124