
Nonlinear Model Reduction by Moment-Matching for a Point Absorber Wave Energy Conversion System

 ,
,  and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Notation and Conventions
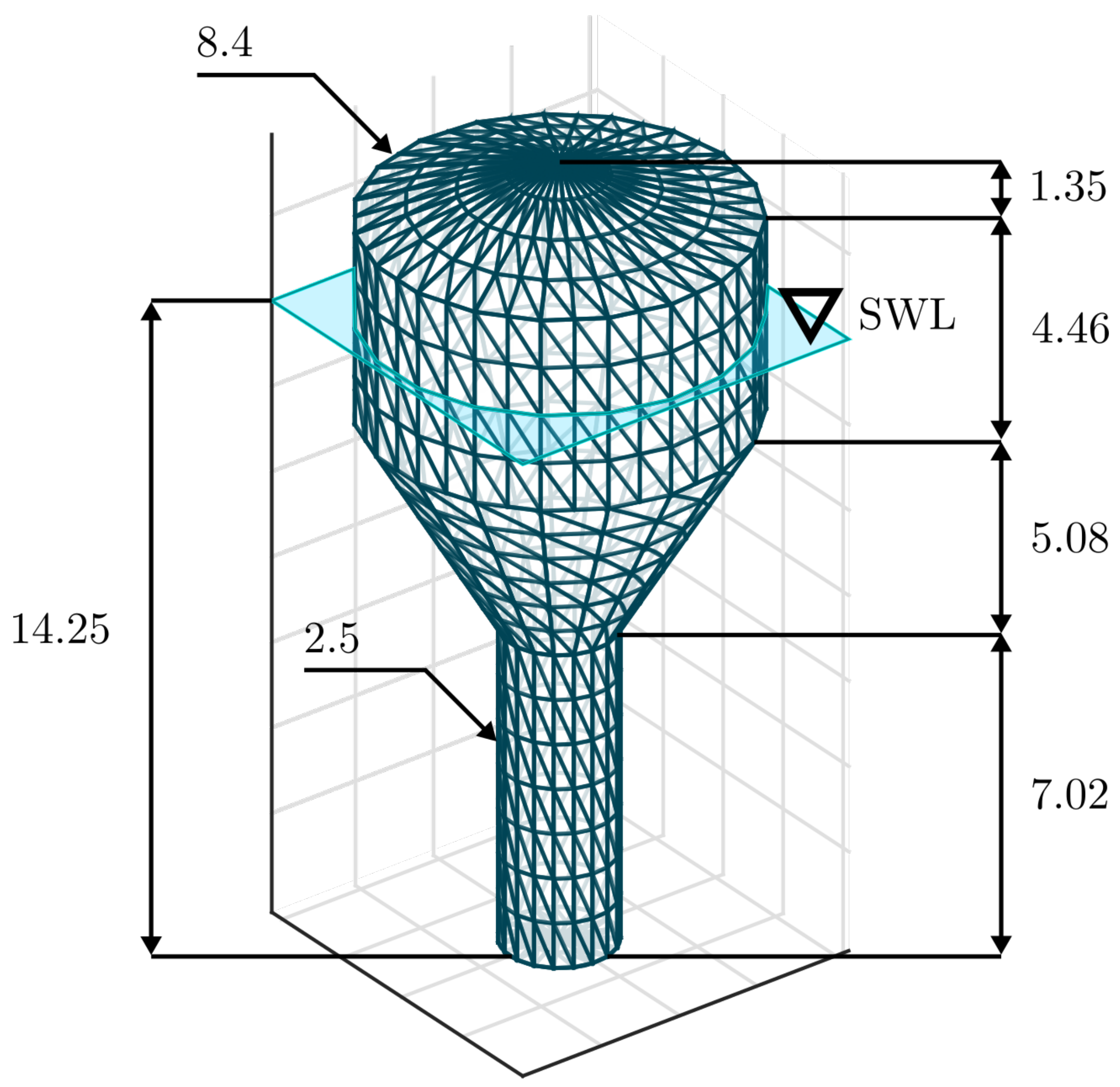
2. Point Absorber Dynamics
3. Moment-Based Analysis of the WEC
3.1. Definition of Moment
3.2. Model Reduction by Moment-Matching
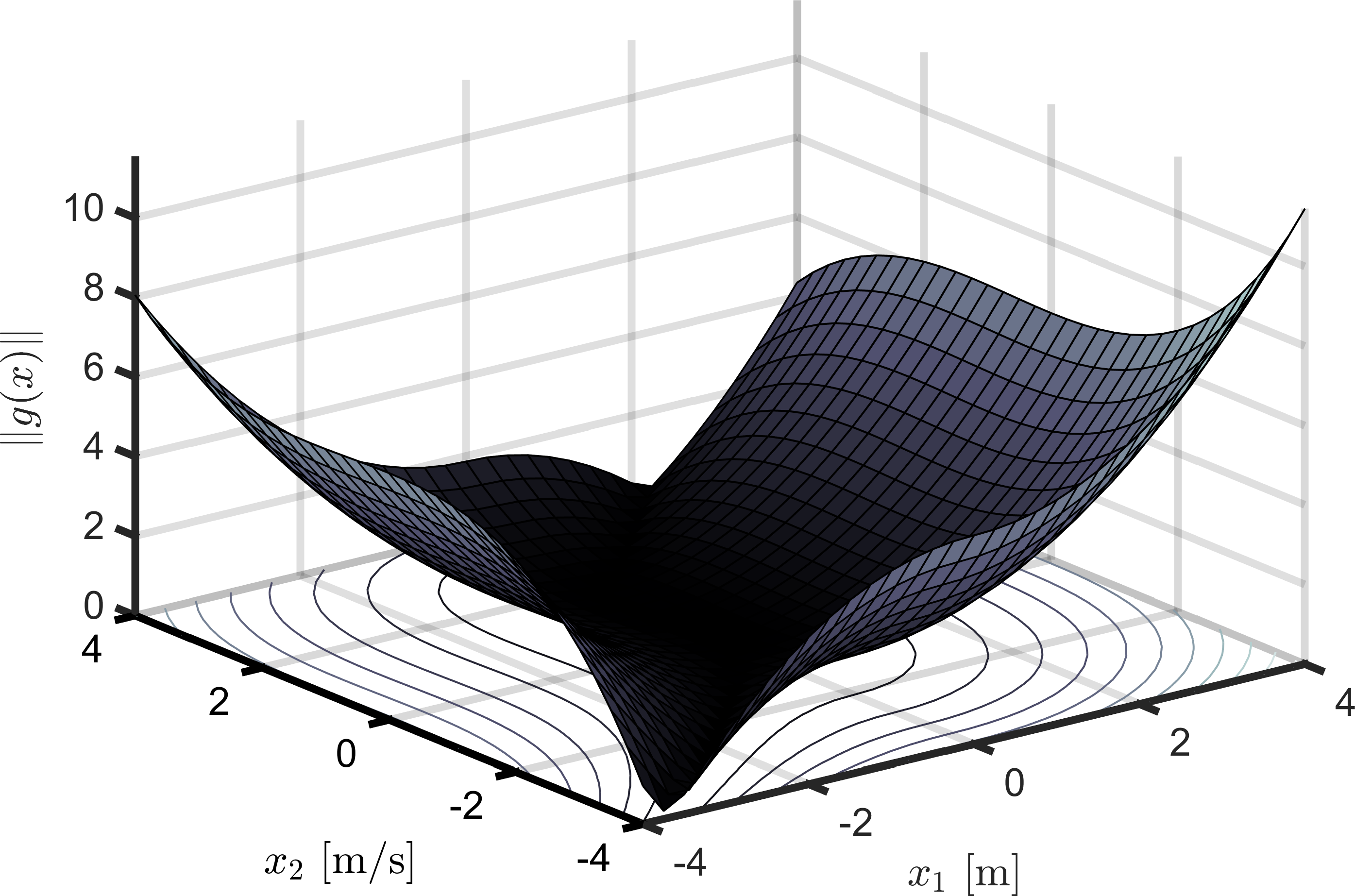
3.3. Approximation of
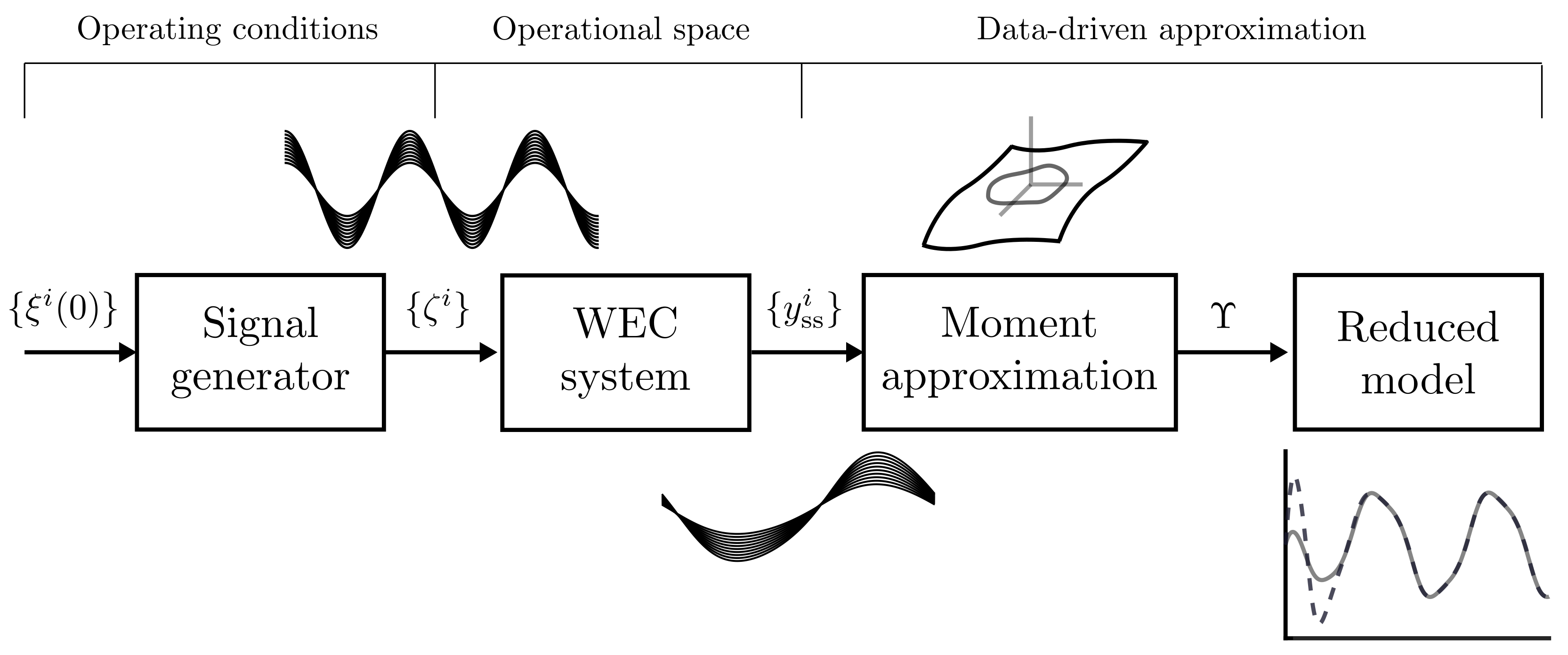
3.4. Systematic Overview
- (S1)
- Choose the fundamental frequency associated with the selected wave conditions.
- (S2)
- Compute S as in Equation (10) and set .
- (S3)
- Compute the set of trial trajectories via the set of initial conditions of interest.
- (S4)
- Compute the set of associated input signals .
- (S5)
- For each defined input , with , compute the steady-state output response of the WEC system (collected after a sufficiently large time ).
- (S6)
- Choose the set of time instants , with , such that and Assumption A4 holds.
- (S7)
- Compute the matrices and as in Equation (18).
- (S8)
- Compute as the unique least-square solution expressed in (19).
- (S9)
- Construct the family of reduced order models achieving moment-matching for the WEC system asfor any matrix such that .
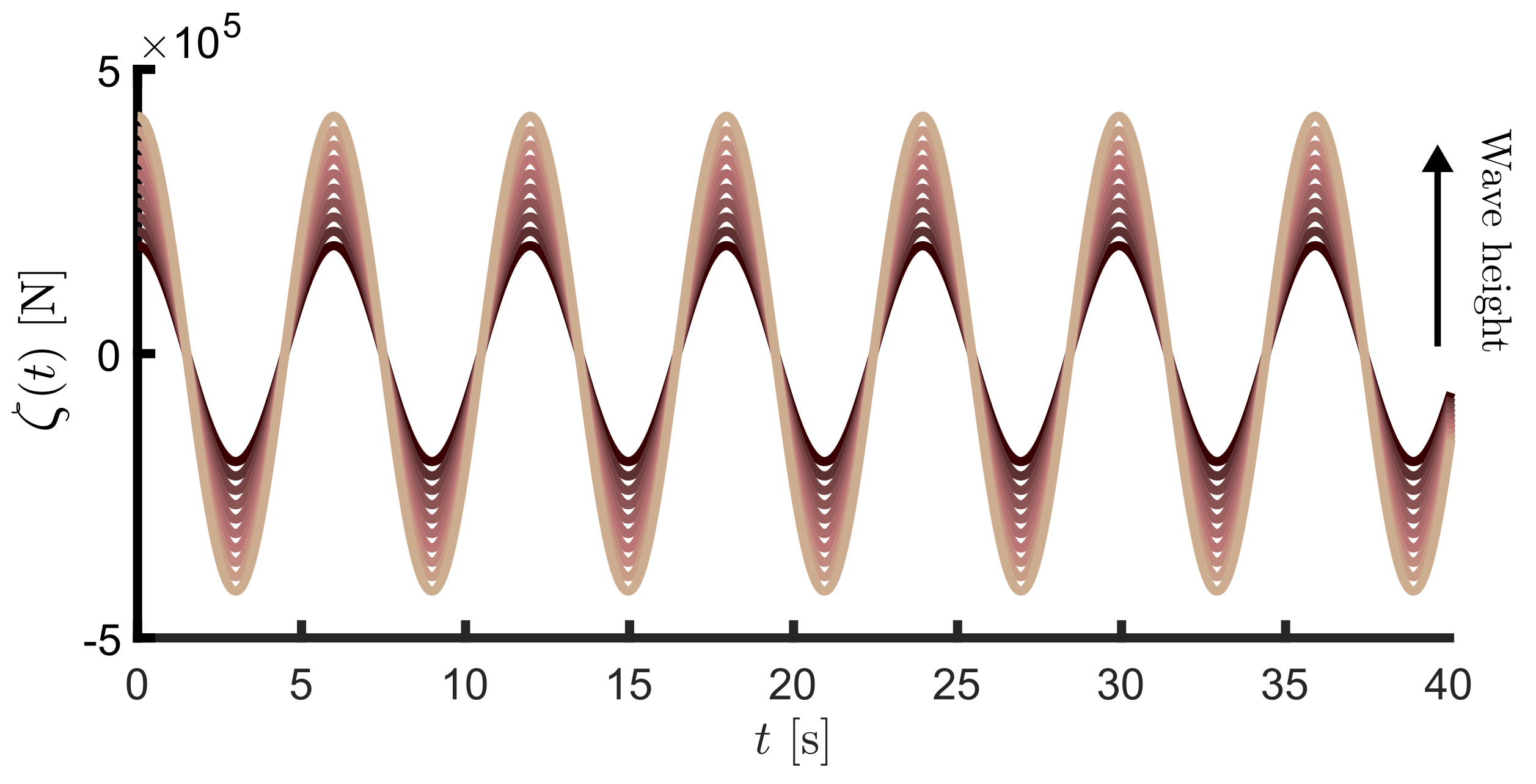
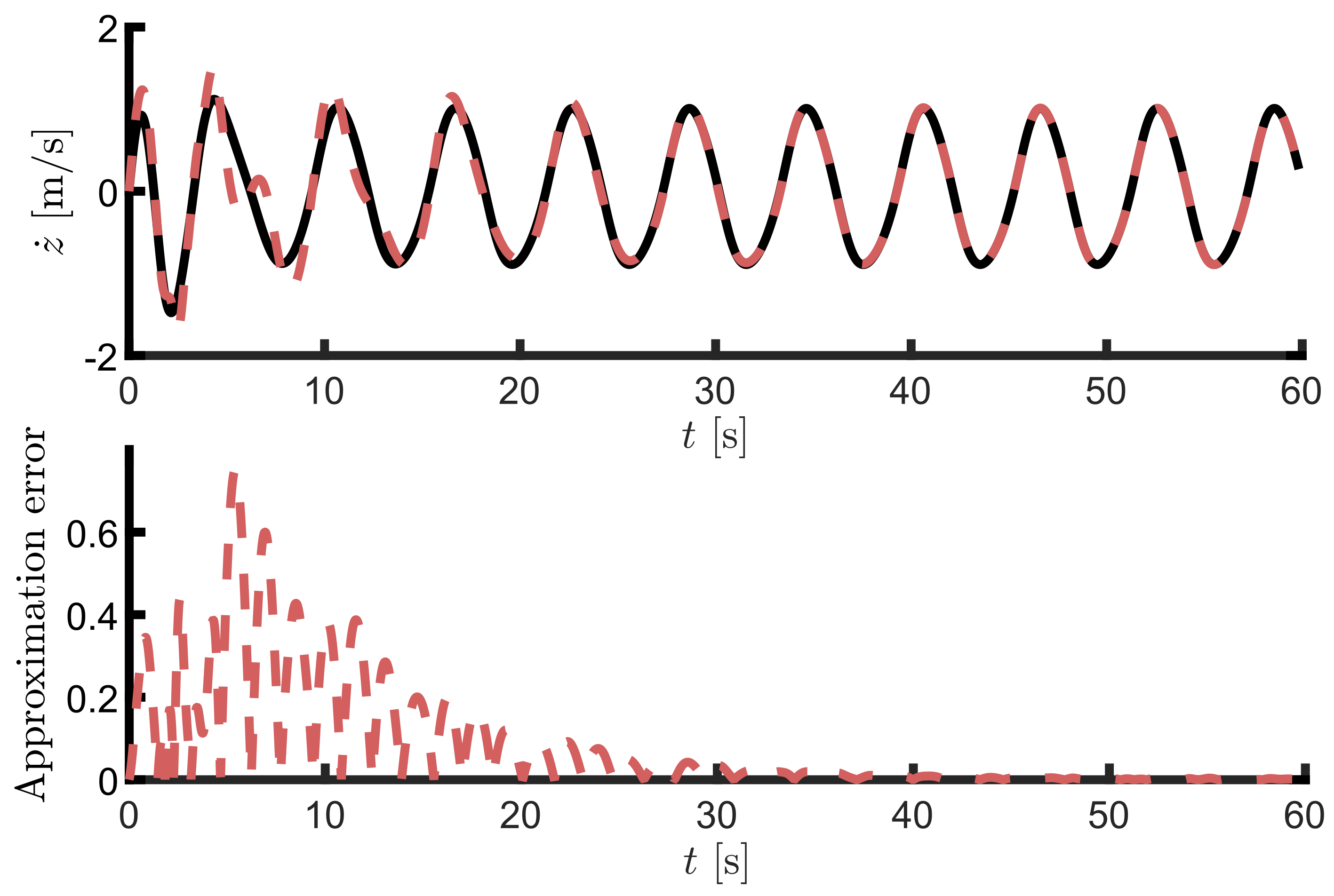
4. Numerical Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A. Proof of Proposition 1
Appendix B. Proof of Proposition 2
| 1 | |
| 2 | From now on, the dependence on t is dropped when clear from the context. |
| 3 | Note that this is performed without any loss of generality, and merely due to the importance of the velocity variable within the WEC optimal control formulation. |
| 4 | |
| 5 | The interested reader is referred to [26] for a formal treatment of the concept of excitability for a general class of systems. |
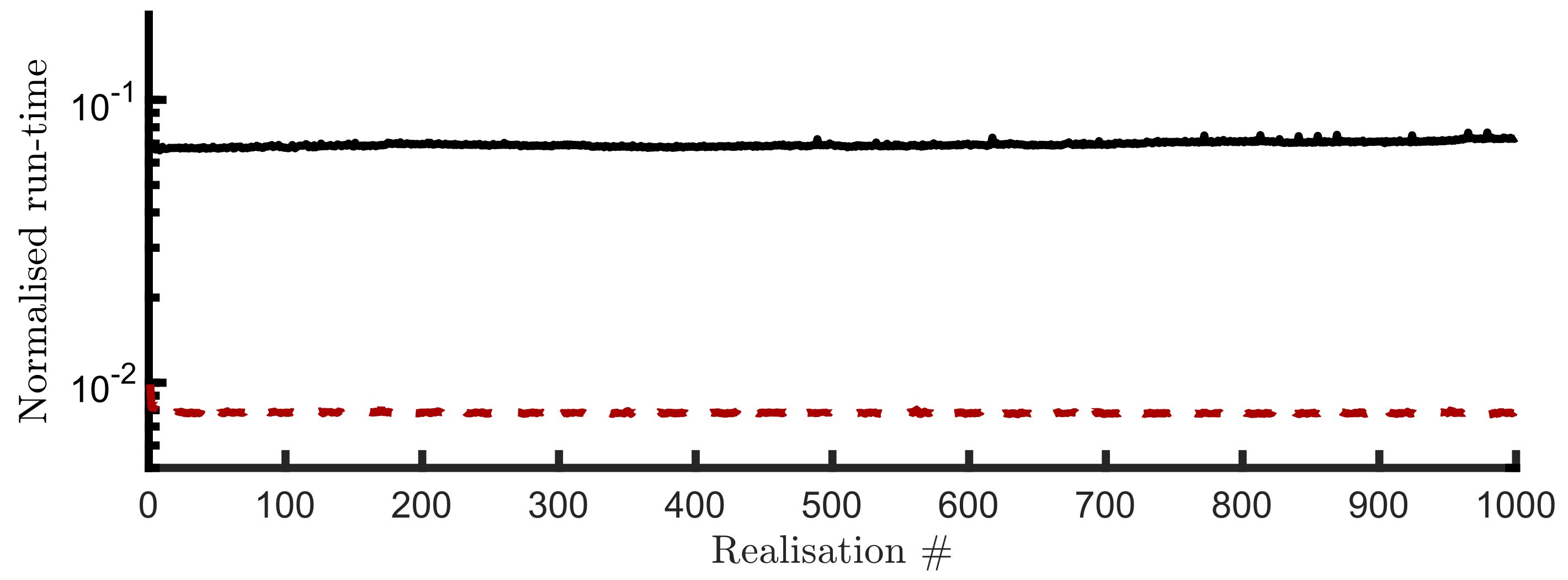
| 6 | The normalised run-time is defined as the time required to compute the output corresponding to each analysed model, and the simulation length. |
References
- Ringwood, J.V. Wave energy control: Status and perspectives 2020. IFAC-PapersOnLine 2020, 53, 12271–12282. [Google Scholar] [CrossRef]
- Ringwood, J.V.; Bacelli, G.; Fusco, F. Energy-maximizing control of wave-energy converters: The development of control system technology to optimize their operation. IEEE Control Syst. 2014, 34, 30–55. [Google Scholar]
- García-Violini, D.; Faedo, N.; Jaramillo-Lopez, F.; Ringwood, J.V. Simple Controllers for Wave Energy Devices Compared. J. Mar. Sci. Eng. 2020, 8, 793. [Google Scholar] [CrossRef]
- Faedo, N. Optimal Control and Model Reduction for Wave Energy Systems: A Moment-Based Approach. Ph.D. Thesis, National University of Ireland, Maynooth, Ireland, 2020. [Google Scholar]
- Giorgi, G.; Gomes, R.P.F.; Bracco, G.; Mattiazzo, G. Numerical investigation of parametric resonance due to hydrodynamic coupling in a realistic wave energy converter. Nonlinear Dyn. 2020, 101, 153–170. [Google Scholar] [CrossRef] [PubMed]
- Giorgi, G. Nonlinear Hydrodynamic Modelling of Wave Energy Converters under Controlled Conditions. Ph.D. Thesis, Department of Electronic Engineering, Maynooth University, Maynooth, Ireland, 2018. [Google Scholar]
- Suchithra, R.; Ezhilsabareesh, K.; Samad, A. Development of a reduced order wave to wire model of an OWC wave energy converter for control system analysis. Ocean Eng. 2019, 172, 614–628. [Google Scholar] [CrossRef]
- Penalba Retes, M.; Ringwood, J.V. Systematic complexity reduction of wave-to-wire models for wave energy system design. Ocean Eng. 2020, 217, 107651. [Google Scholar] [CrossRef]
- Penalba, M.; Ringwood, J.V. Linearisation-based nonlinearity measures for wave-to-wire models in wave energy. Ocean Eng. 2019, 171, 496–504. [Google Scholar] [CrossRef]
- Faedo, N.; Piuma, F.J.D.; Giorgi, G.; Ringwood, J.V. Nonlinear model reduction for wave energy systems: A moment-matching-based approach. Nonlinear Dyn. 2020, 102, 1215–1237. [Google Scholar] [CrossRef]
- Astolfi, A. Model reduction by moment matching for linear and nonlinear systems. IEEE Trans. Autom. Control 2010, 55, 2321–2336. [Google Scholar] [CrossRef]
- Scarciotti, G.; Astolfi, A. Nonlinear Model Reduction by Moment Matching. Found. Trends Syst. Control 2017, 4, 224–409. [Google Scholar] [CrossRef]
- Hals, J.; Ásgeirsson, G.S.; Hjálmarsson, E.; Maillet, J.; Möller, P.; Pires, P.; Guérinel, M.; Lopes, M. Tank testing of an inherently phase-controlled wave energy converter. Int. J. Mar. Energy 2016, 15, 68–84. [Google Scholar]
- Scarciotti, G.; Astolfi, A. Data-driven model reduction by moment matching for linear and nonlinear systems. Automatica 2017, 79, 340–351. [Google Scholar] [CrossRef]
- Faedo, N.; Piuma, F.J.D.; Giorgi, G.; Bracco, G.; Ringwood, J.V.; Mattiazzo, G. Data-driven nonlinear model reduction by moment-matching for the ISWEC system. In Proceedings of the 2021 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Mauritius, Mauritius, 7–8 October 2021; pp. 1–6. [Google Scholar]
- Korde, U.A.; Ringwood, J.V. Hydrodynamic Control of Wave Energy Devices; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Folley, M.; Forehand, D. Chapter 8—Conventional Multiple Degree-of-Freedom Array Models. In Numerical Modelling of Wave Energy Converters; Folley, M., Ed.; Academic Press: New York, NY, USA, 2016; pp. 151–164. [Google Scholar]
- Faedo, N.; Scarciotti, G.; Astolfi, A.; Ringwood, J.V. Energy-maximising moment-based constrained optimal control of ocean wave energy farms. IET Renew. Power Gener. 2021, 15, 3395–3408. [Google Scholar] [CrossRef]
- Faedo, N.; Scarciotti, G.; Astolfi, A.; Ringwood, J.V. Nonlinear energy-maximizing optimal control of wave energy systems: A moment-based approach. IEEE Trans. Control Syst. Technol. 2021, 29, 2533–2547. [Google Scholar] [CrossRef]
- Faedo, N.; Peña-Sanchez, Y.; Ringwood, J.V. Parametric representation of arrays of wave energy converters for motion simulation and unknown input estimation: A moment-based approach. Appl. Ocean Res. 2020, 98, 102055. [Google Scholar] [CrossRef]
- Pérez, T.; Fossen, T.I. Time-vs. frequency-domain identification of parametric radiation force models for marine structures at zero speed. Model. Identif. Control 2008, 29, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Morison, J.; Johnson, J.; Schaaf, S.A. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- Astolfi, A.; Scarciotti, G.; Simard, J.; Faedo, N.; Ringwood, J.V. Model Reduction by Moment Matching: Beyond Linearity A Review of the Last 10 Years. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Korea, 14–18 December 2020; pp. 1–16. [Google Scholar]
- Faedo, N.; Scarciotti, G.; Astolfi, A.; Ringwood, J.V. On the Approximation of Moments for Nonlinear Systems. IEEE Trans. Autom. Control 2021, 66, 5538–5545. [Google Scholar] [CrossRef]
- Faedo, N.; Carapellese, F.; Pasta, E.; Mattiazzo, G. On the principle of impedance-matching for underactuated wave energy harvesting systems. Appl. Ocean Res. 2021, 118, 102958. [Google Scholar] [CrossRef]
- Padoan, A.; Scarciotti, G.; Astolfi, A. A Geometric Characterization of the Persistence of Excitation Condition for the Solutions of Autonomous Systems. IEEE Trans. Autom. Control 2017, 62, 5666–5677. [Google Scholar] [CrossRef] [Green Version]
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Faedo, N.; Peña-Sanchez, Y.; Ringwood, J.V. Finite-order hydrodynamic model determination for wave energy applications using moment-matching. Ocean Eng. 2018, 163, 251–263. [Google Scholar] [CrossRef] [Green Version]
- Pena-Sanchez, Y.; Faedo, N.; Penalba, M.; Giuseppe, G.; Mérigaud, A.; Windt, C.; Violini, D.G.; LiGuo, W.; Ringwood, J. Finite-order hydrodynamic approximation by moment-matching (FOAMM) toolbox for wave energy applications. In Proceedings of the European Tidal and Wave Energy Conference Proceedings (EWTEC), Napoli, Italy, 1–6 September 2019; Volume 2019. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Faedo, N.; Olaya, S.; Ringwood, J.V. Optimal control, MPC and MPC-like algorithms for wave energy systems: An overview. IFAC J. Syst. Control 2017, 1, 37–56. [Google Scholar] [CrossRef] [Green Version]
- Isidori, A.; Astolfi, A. Disturbance attenuation and H∞-control via measurement feedback in nonlinear systems. IEEE Trans. Autom. Control 1992, 37, 1283–1293. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papini, G.; Dores Piuma, F.J.; Faedo, N.; Ringwood, J.V.; Mattiazzo, G. Nonlinear Model Reduction by Moment-Matching for a Point Absorber Wave Energy Conversion System. J. Mar. Sci. Eng. 2022, 10, 656. https://doi.org/10.3390/jmse10050656
Papini G, Dores Piuma FJ, Faedo N, Ringwood JV, Mattiazzo G. Nonlinear Model Reduction by Moment-Matching for a Point Absorber Wave Energy Conversion System. Journal of Marine Science and Engineering. 2022; 10(5):656. https://doi.org/10.3390/jmse10050656
Chicago/Turabian StylePapini, Guglielmo, Francisco Javier Dores Piuma, Nicolás Faedo, John V. Ringwood, and Giuliana Mattiazzo. 2022. "Nonlinear Model Reduction by Moment-Matching for a Point Absorber Wave Energy Conversion System" Journal of Marine Science and Engineering 10, no. 5: 656. https://doi.org/10.3390/jmse10050656
APA StylePapini, G., Dores Piuma, F. J., Faedo, N., Ringwood, J. V., & Mattiazzo, G. (2022). Nonlinear Model Reduction by Moment-Matching for a Point Absorber Wave Energy Conversion System. Journal of Marine Science and Engineering, 10(5), 656. https://doi.org/10.3390/jmse10050656