
Coupled-Mode Parabolic Equations for the Modeling of Sound Propagation in a Shallow-Water Waveguide with Weak Elastic Bottom


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Equations and Expansions
3. WKB Solutions for Shear Waves
4. Interface Conditions
5. Boundary Conditions
6. Elastic Mode Parabolic Equations (EMPE)
7. Initial-Boundary Value Problem for the System of Elastic Mode Parabolic Equations
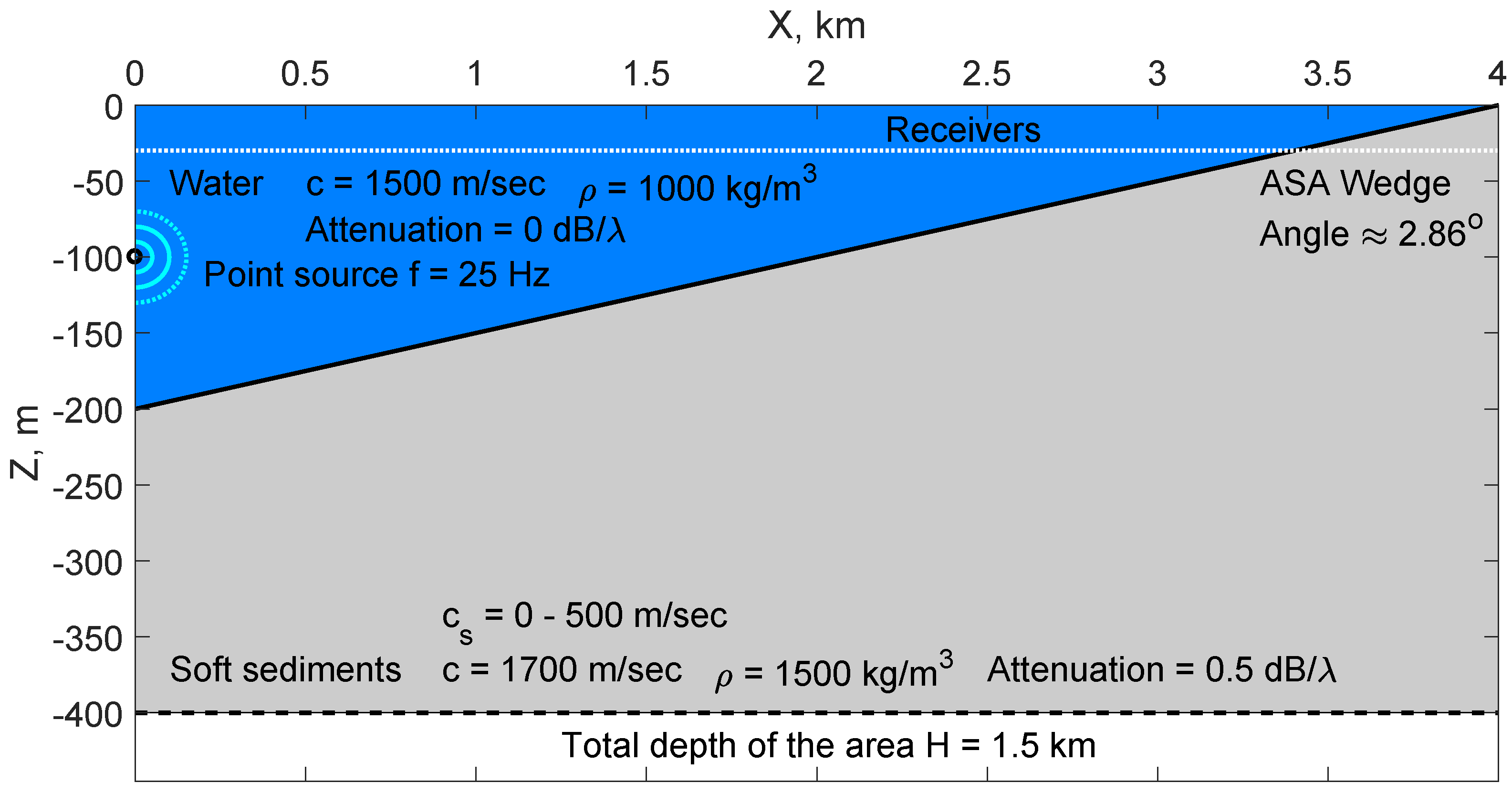
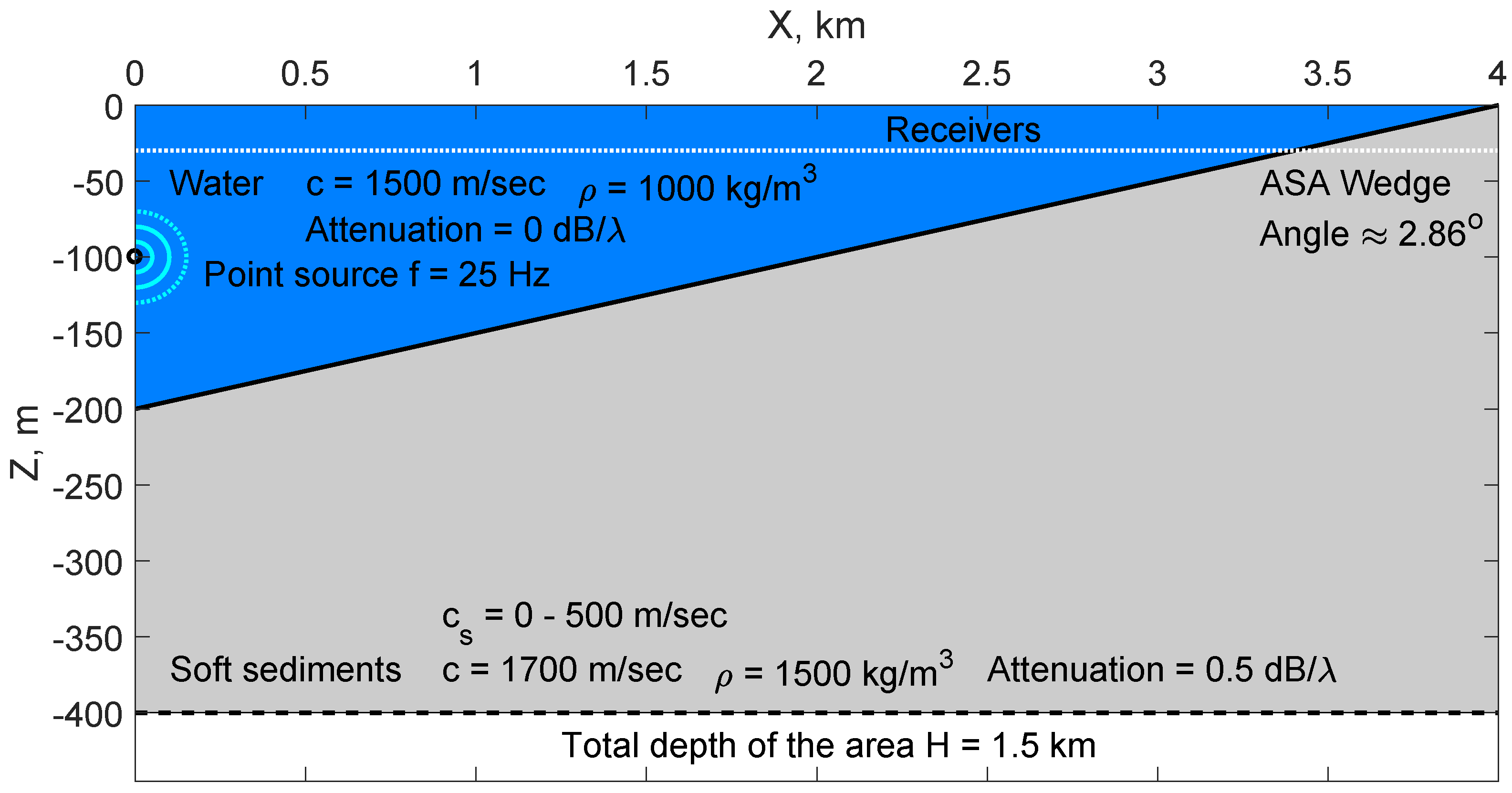
8. Numerical Examples
9. Discussion
10. Conclusions
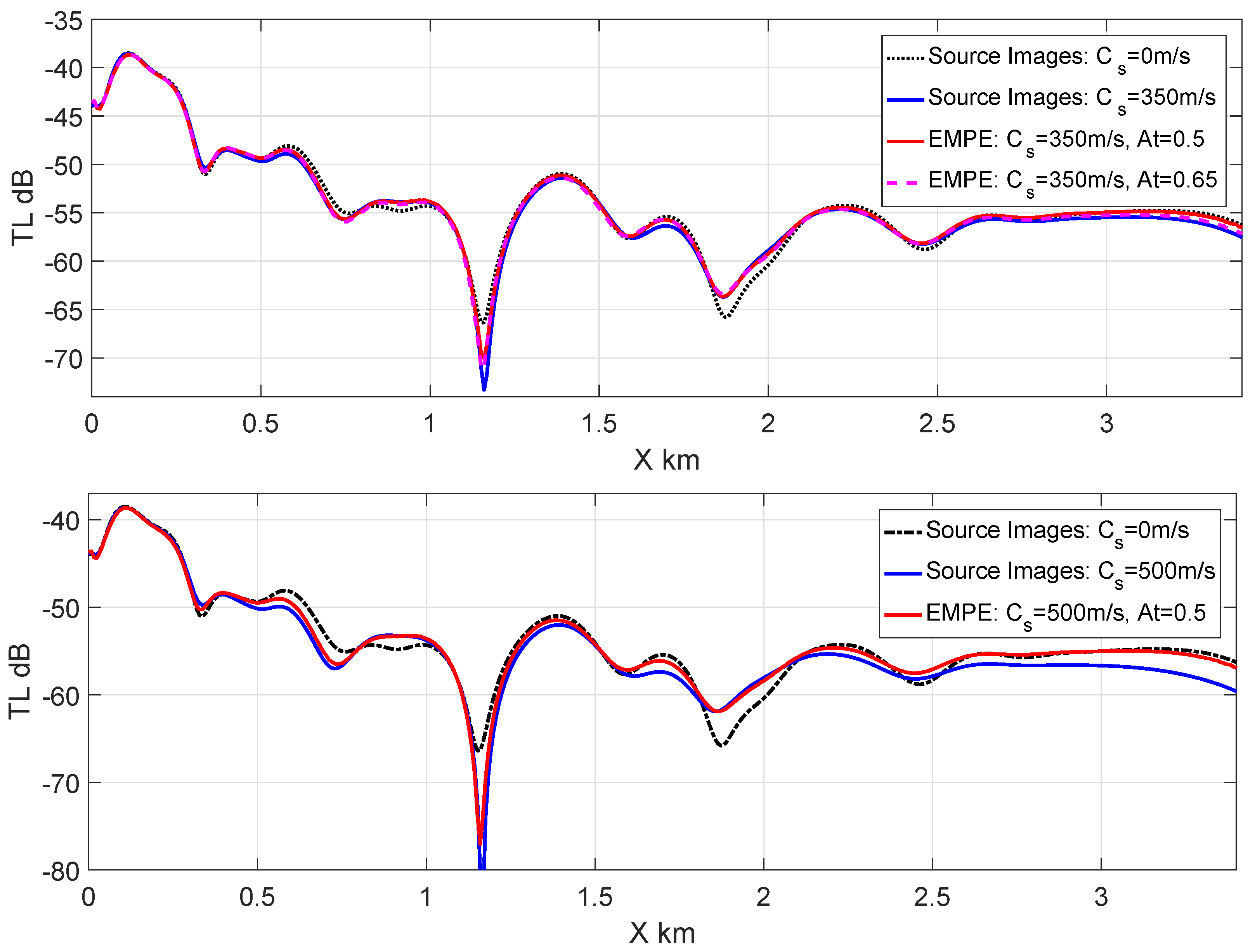
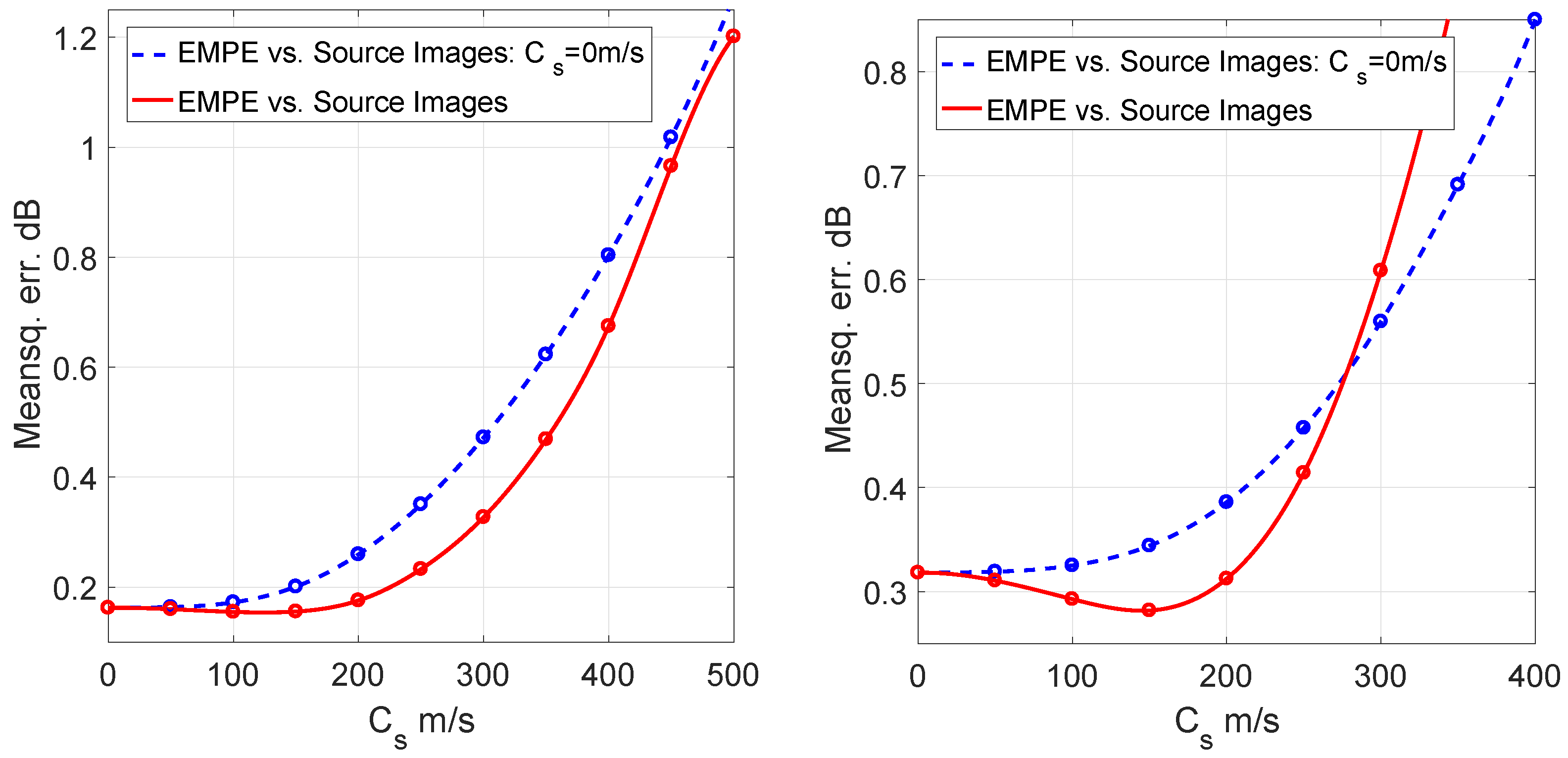
- The proposed method is numerically validated. The test calculations carried out for the ASA wedge benchmark prove to be in excellent agreement with the source image method [14] for shear wave speeds up to 300 m/s at the bottom and a rather good agreement of up to 400 m/s.
- We have developed the software package [32] for the modeling of sound propagation in 3D waveguides based on the derived equations.
- This software package has been successfully used to plan and analyze the results of the acoustic experiments on the propagation of sound in a shallow sea [33].
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of the Main Ansatz
References
- Jensen, F.B.; Porter, M.B.; Kuperman, W.A.; Schmidt, H. Computational Ocean Acoustics, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Manul’chev, D.; Tyshchenko, A.; Fershalov, M.; Petrov, P. Estimating Sound Exposure Levels Due to a Broadband Source over Large Areas of Shallow Sea. J. Mar. Sci. Eng. 2022, 10, 82. [Google Scholar] [CrossRef]
- Porter, M.B. Beam tracing for two-and three-dimensional problems in ocean acoustics. J. Acoust. Soc. Am. 2019, 146, 2016–2029. [Google Scholar] [CrossRef] [PubMed]
- de Moraes Calazan, R.; Rodríguez, O.C. Simplex based three-dimensional eigenray search for underwater predictions. J. Acoust. Soc. Am. 2018, 143, 2059–2065. [Google Scholar] [CrossRef] [PubMed]
- Bottero, A.; Cristini, P.; Komatitsch, D.; Brissaud, Q. Broadband transmission losses and time dispersion maps from time-domain numerical simulations in ocean acoustics. J. Acoust. Soc. Am. 2018, 144, EL222–EL228. [Google Scholar] [CrossRef]
- Lin, Y.T.; Porter, M.B.; Sturm, F.; Isakson, M.J.; Chiu, C.S. Introduction to the special issue on three-dimensional underwater acoustics. J. Acoust. Soc. Am. 2019, 146, 1855–1857. [Google Scholar] [CrossRef]
- Petrov, P.; Katsnelson, B.; Li, Z. Modeling Techniques for Underwater Acoustic Scattering and Propagation (Including 3D Effects). J. Mar. Sci. Eng. 2022, 10, 1192. [Google Scholar] [CrossRef]
- Collins, M.D. The adiabatic mode parabolic equation. J. Acoust. Soc. Am. 1993, 94, 2269–2278. [Google Scholar] [CrossRef]
- Trofimov, M.Y. Narrow-angle parabolic equations of adiabatic single-mode propagation in horizontally inhomogeneous shallow sea. Acoust. Phys. 1999, 45, 575–580. [Google Scholar]
- Petrov, P.S.; Ehrhardt, M.; Tyshchenko, A.G.; Petrov, P.N. Wide-angle mode parabolic equations for the modelling of horizontal refraction in underwater acoustics and their numerical solution on unbounded domains. J. Sound Vib. 2020, 484, 115526. [Google Scholar] [CrossRef]
- Tyshchenko, A.; Zaikin, O.; Sorokin, M.; Petrov, P. A Program based on the Wide-Angle Mode Parabolic Equations Method for Computing Acoustic Fields in Shallow Water. Acoust. Phys. 2021, 67, 512–519. [Google Scholar] [CrossRef]
- Abawi, A.T.; Kuperman, W.A.; Collins, M.D. The coupled mode parabolic equation. J. Acoust. Soc. Am. 1997, 102, 233–238. [Google Scholar] [CrossRef]
- Trofimov, M.Y.; Kozitskiy, S.B.; Zakharenko, A.D. A mode parabolic equation method in the case of the resonant mode interaction. Wave Motion 2015, 58, 42–52. [Google Scholar] [CrossRef]
- Tang, J.; Petrov, P.; Kozitskiy, S.; Piao, S. On the source images method for sound propagation in a penetrable wedge: Some corrections and appendices. In Proceedings of the IEEE International Conference Days on Diffraction 2017, St. Petersburg, Russia, 19–23 June 2017; pp. 304–310. [Google Scholar]
- Tu, H.; Wang, Y.; Lan, Q.; Liu, W.; Xiao, W.; Ma, S. A Chebyshev–Tau spectral method for normal modes of underwater sound propagation with a layered marine environment. J. Sound Vib. 2021, 492, 115784. [Google Scholar] [CrossRef]
- Tu, H.; Wang, Y.; Lan, Q.; Liu, W.; Xiao, W.; Ma, S. Applying a Legendre collocation method based on domain decomposition to calculate underwater sound propagation in a horizontally stratified environment. J. Sound Vib. 2021, 511, 116364. [Google Scholar] [CrossRef]
- Tu, H.; Wang, Y.; Yang, C.; Wang, X.; Ma, S.; Xiao, W.; Liu, W. A novel algorithm to solve for an underwater line source sound field based on coupled modes and a spectral method. J. Comput. Phys. 2022, 468, 111478. [Google Scholar] [CrossRef]
- Tu, H.; Wang, Y.; Ma, X.; Zhu, X. Applying the Chebyshev–Tau spectral method to solve the parabolic equation model of wide-angle rational approximation in ocean acoustics. J. Theory Comput. Acoust. 2022, 30, 2150013. [Google Scholar] [CrossRef]
- Sabatini, R.; Cristini, P. A multi-domain collocation method for the accurate computation of normal modes in open oceanic and atmospheric waveguides. Acta Acust. United Acust. 2019, 105, 464–474. [Google Scholar] [CrossRef]
- Luo, W.; Yu, X.; Yang, X.; Zhang, Z.; Zhang, R. A three-dimensional coupled-mode model for the acoustic field in a two-dimensional waveguide with perfectly reflecting boundaries. Chin. Phys. B 2016, 25, 124309. [Google Scholar] [CrossRef]
- Chapman, D.M.F.; Godin, O.A. Dispersion of interface waves in sediments with power-law shear speed profiles. 1. Exact and approximate analytical results. J. Acoust. Soc. Am. 2001, 110, 1890–1907. [Google Scholar] [CrossRef]
- Hudson, J.A. A parabolic approximation for surface waves. Geophys. J. Int. 1981, 67, 755–770. [Google Scholar] [CrossRef]
- Hudson, J.A. A parabolic approximation for elastic waves. Wave Motion 1980, 2, 207–214. [Google Scholar] [CrossRef]
- Trofimov, M.Y.; Kozitskiy, S.B.; Zakharenko, A.D. Weak shear modulus in the acoustic mode parabolic equation. In Proceedings of the IEEE International Conference Days on Diffraction 2016, St. Petersburg, Russia, 27 June–1 July 2016; pp. 416–421. [Google Scholar]
- Nayfeh, A.H. Perturbation Methods; John Wiley and Sons: New York, NY, USA, 1973; p. 437. [Google Scholar]
- Babich, V.M.; Kiselev, A.P. Elastic Waves: High Frequency Theory; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Brehovskih, L.M.; Goncharov, V.V. The introduction to the Continuous Media Mechanics; Nauka: Moscow, Russia, 1982. [Google Scholar]
- Collino, F. Perfectly matched absorbing layers for the paraxial equations. J. Comput. Phys. 1997, 131, 164–180. [Google Scholar] [CrossRef]
- Lin, Y.T.; Duda, T.F.; Newhall, A.E. Three-dimensional sound propagation models using the parabolic-equation approximation and the split-step Fourier method. J. Comput. Acoust. 2013, 21, 1250018. [Google Scholar] [CrossRef]
- Sturm, F. Leading-order cross term correction of three-dimensional parabolic equation models. J. Acoust. Soc. Am. 2016, 139, 263–270. [Google Scholar] [CrossRef] [PubMed]
- Petrov, P.S.; Sturm, F. An explicit analytical solution for sound propagation in a three-dimensional penetrable wedge with small apex angle. J. Acoust. Soc. Am. 2016, 139, 1343–1352. [Google Scholar] [CrossRef]
- Software “AmpeQ” for Simulating of the Acoustic Fields in the Sallow Water Waveguides by the Elastic Mode Parabolic Equation Method. Available online: https://disk.yandex.ru/d/Ao2lyJQBuNB5pQ (accessed on 14 September 2022).
- Rutenko, A.N.; Kozitskii, S.B.; Manul’chev, D.S. Effect of a sloping bottom on sound propagation. Acoust. Phys. 2015, 61, 72–84. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kozitskiy, S. Coupled-Mode Parabolic Equations for the Modeling of Sound Propagation in a Shallow-Water Waveguide with Weak Elastic Bottom. J. Mar. Sci. Eng. 2022, 10, 1355. https://doi.org/10.3390/jmse10101355
Kozitskiy S. Coupled-Mode Parabolic Equations for the Modeling of Sound Propagation in a Shallow-Water Waveguide with Weak Elastic Bottom. Journal of Marine Science and Engineering. 2022; 10(10):1355. https://doi.org/10.3390/jmse10101355
Chicago/Turabian StyleKozitskiy, Sergey. 2022. "Coupled-Mode Parabolic Equations for the Modeling of Sound Propagation in a Shallow-Water Waveguide with Weak Elastic Bottom" Journal of Marine Science and Engineering 10, no. 10: 1355. https://doi.org/10.3390/jmse10101355
APA StyleKozitskiy, S. (2022). Coupled-Mode Parabolic Equations for the Modeling of Sound Propagation in a Shallow-Water Waveguide with Weak Elastic Bottom. Journal of Marine Science and Engineering, 10(10), 1355. https://doi.org/10.3390/jmse10101355