Dynamics of Double-Beam System with Various Symmetric Boundary Conditions Traversed by a Moving Force: Analytical Analyses

 , and
, and 
Abstract
:1. Introduction
2. Frequencies and Mode Shapes of the Double-Beam System
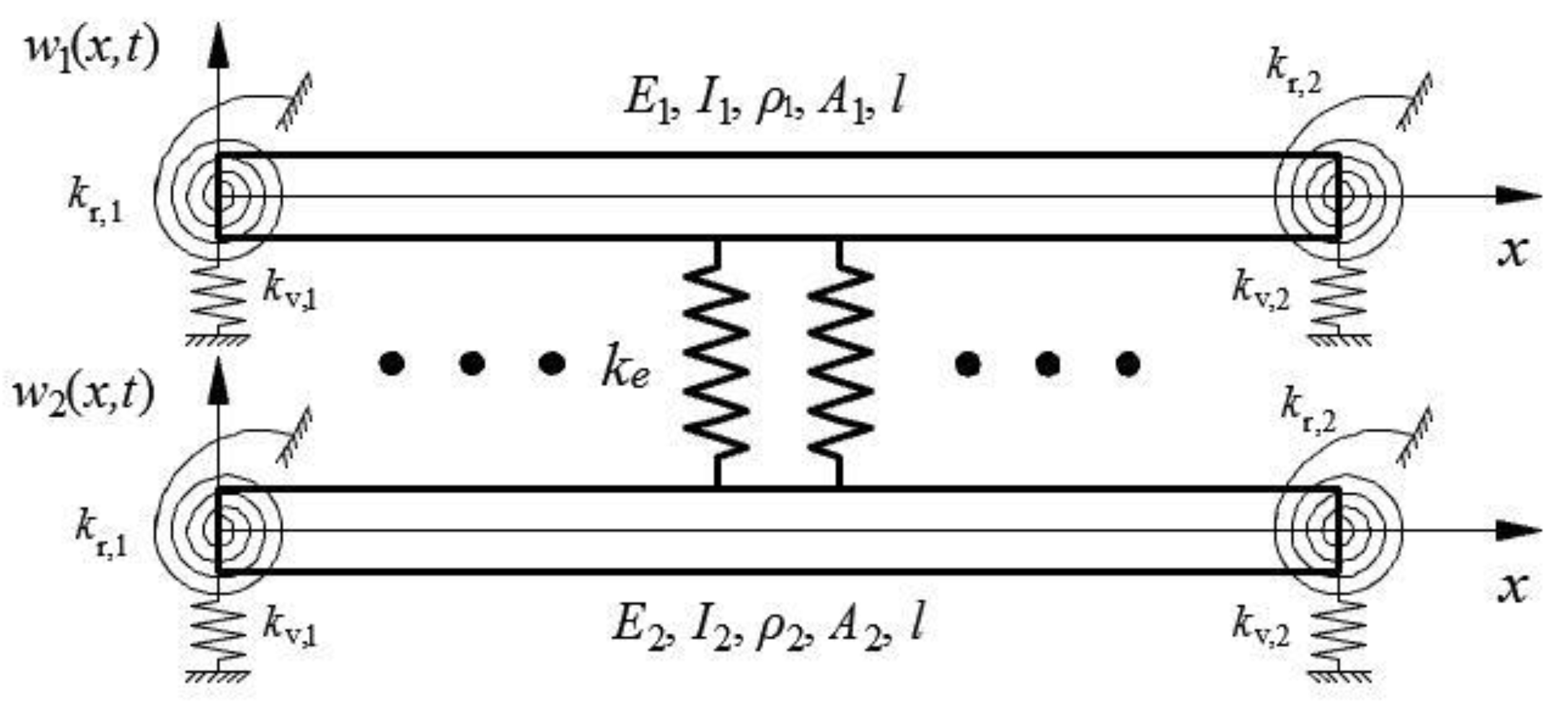
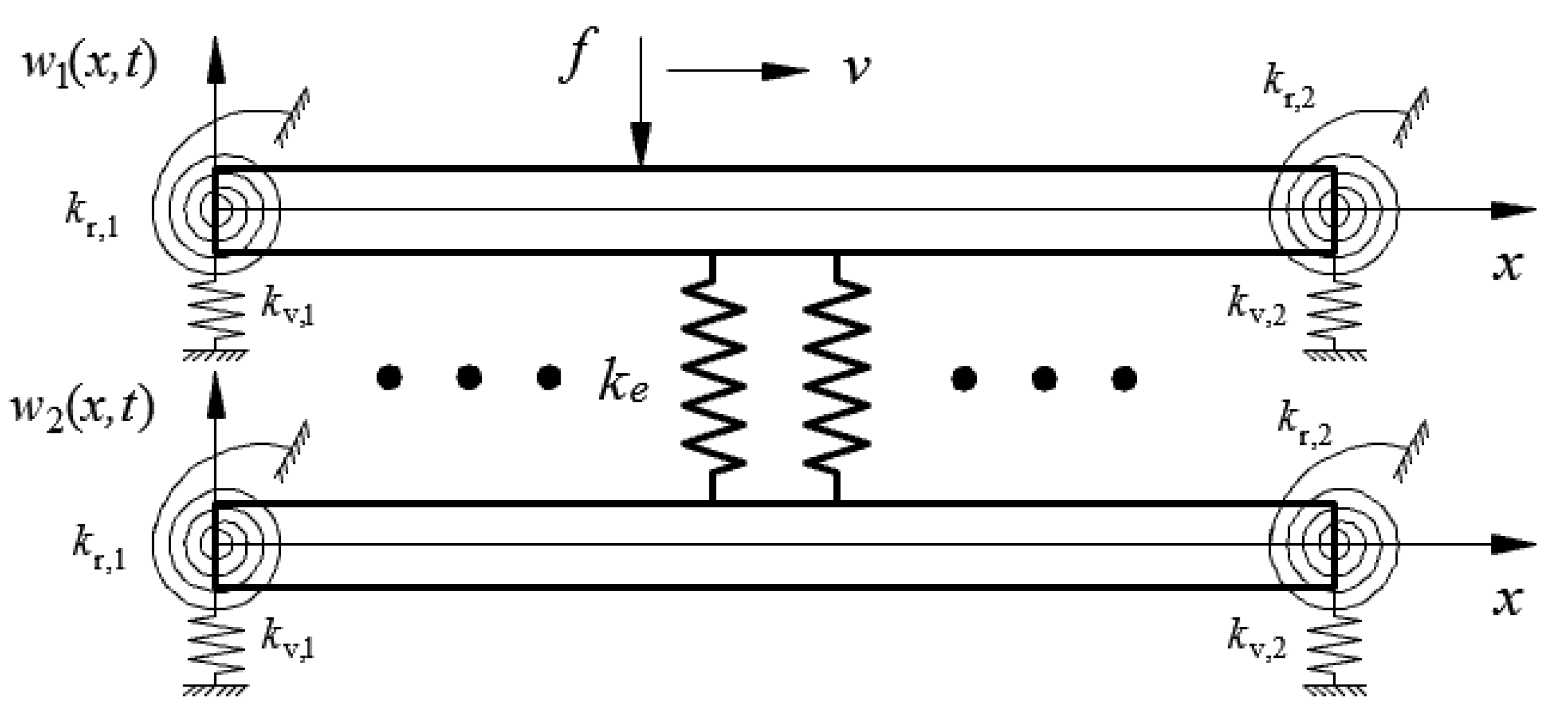
2.1. Mathematical Formulation
2.1.1. Fixed-Fixed Boundary Conditions
2.1.2. Pinned-Pinned Boundary Conditions
2.1.3. Fixed-Pinned Boundary Conditions
2.1.4. Pined-Fixed Boundary Conditions
2.1.5. Fixed-Free Boundary Conditions
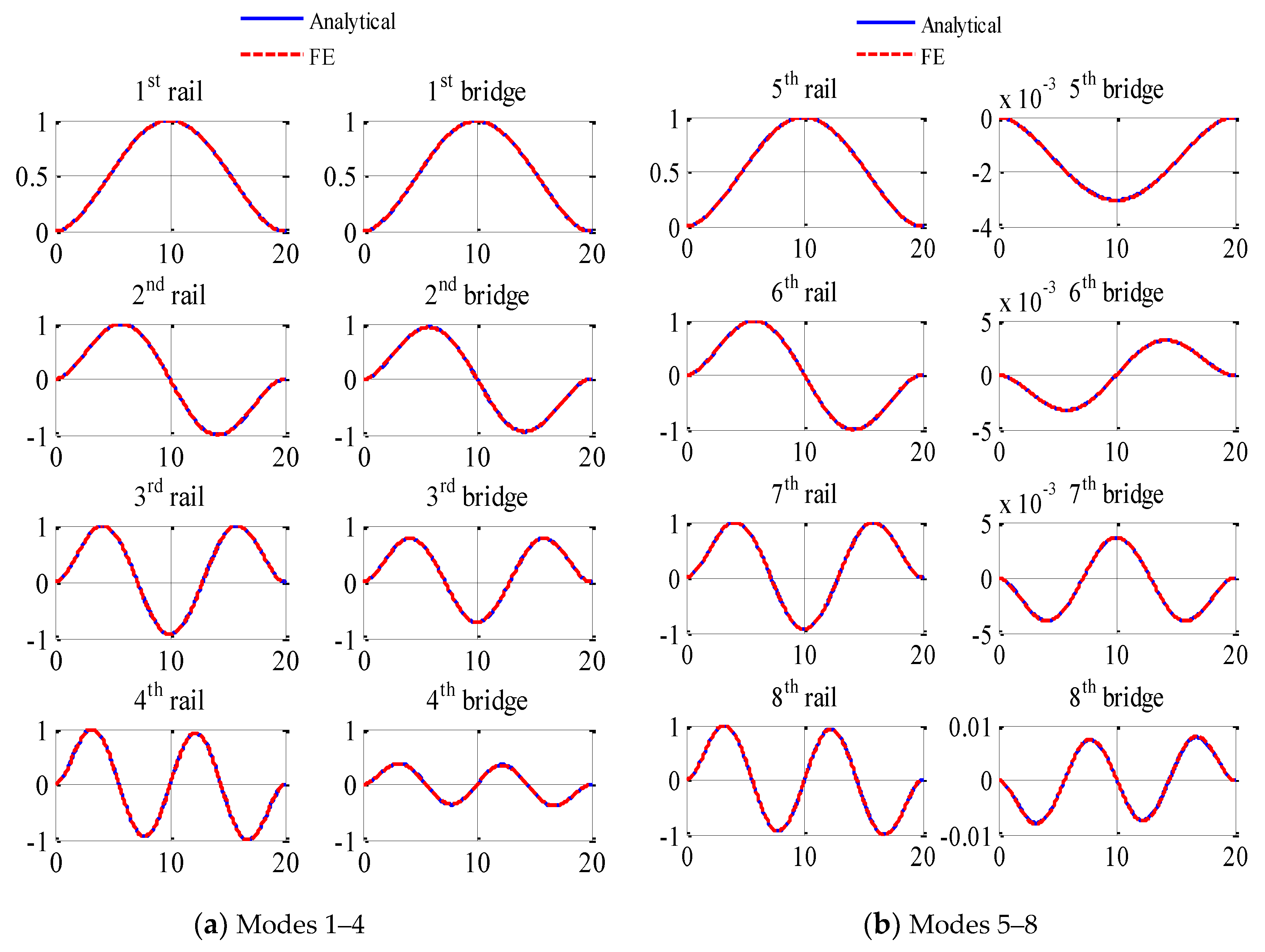
2.2. Verification of the Analytical Solutions in Section 2.1
2.3. Parametric Studies
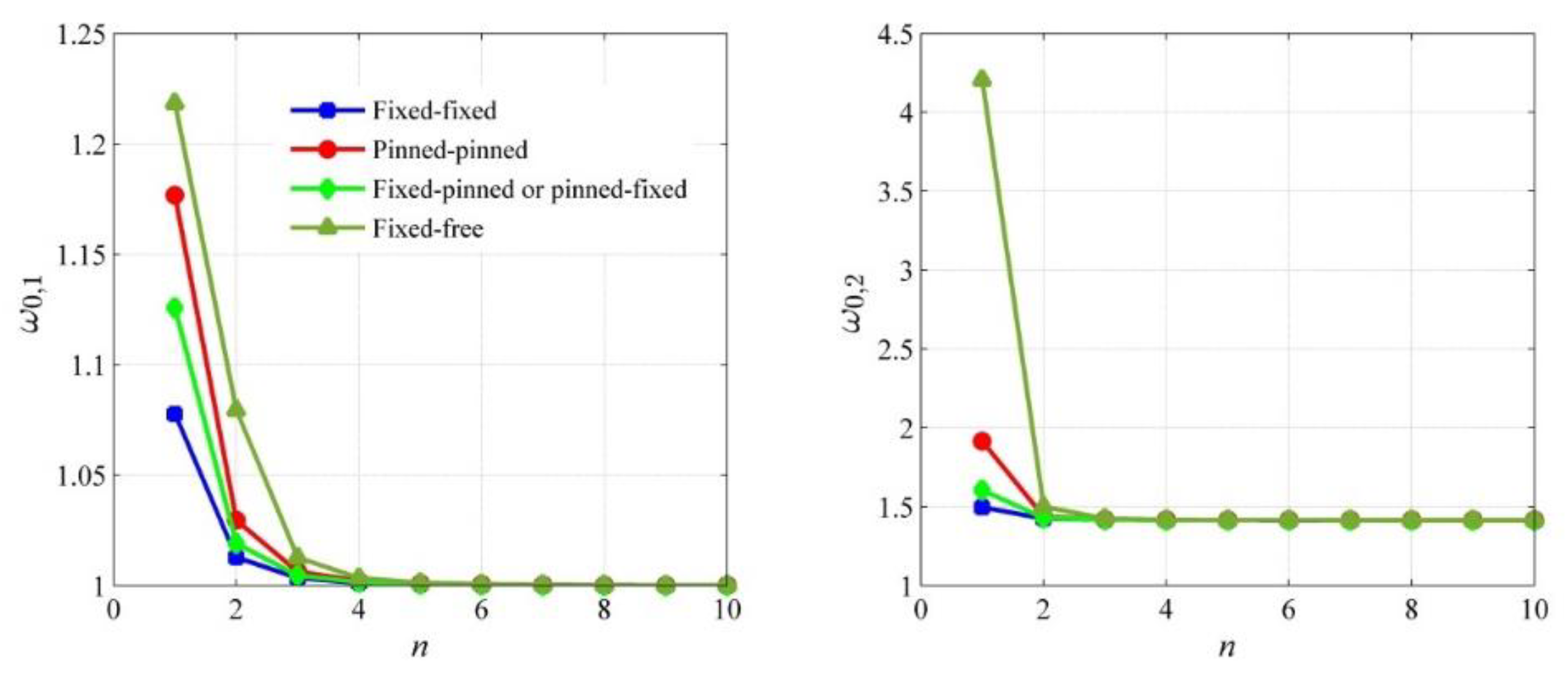
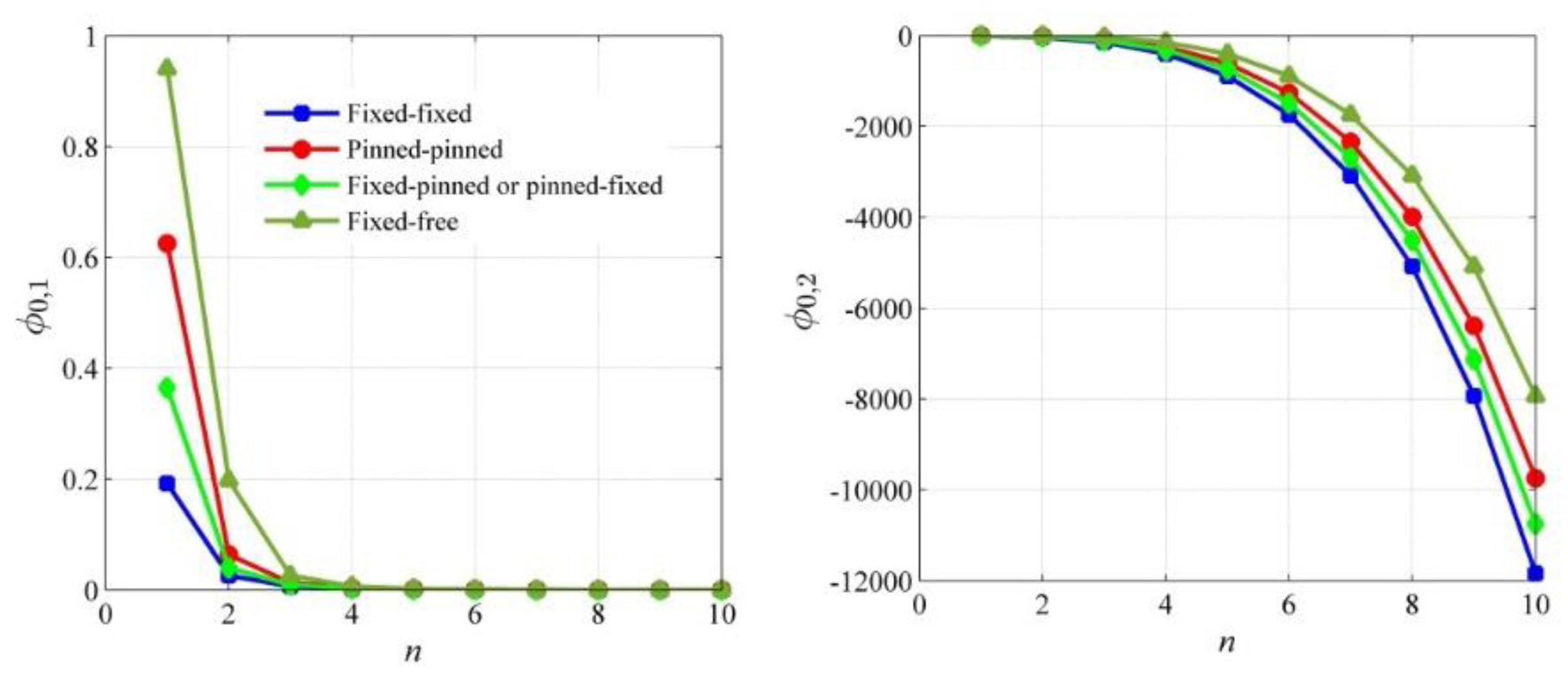
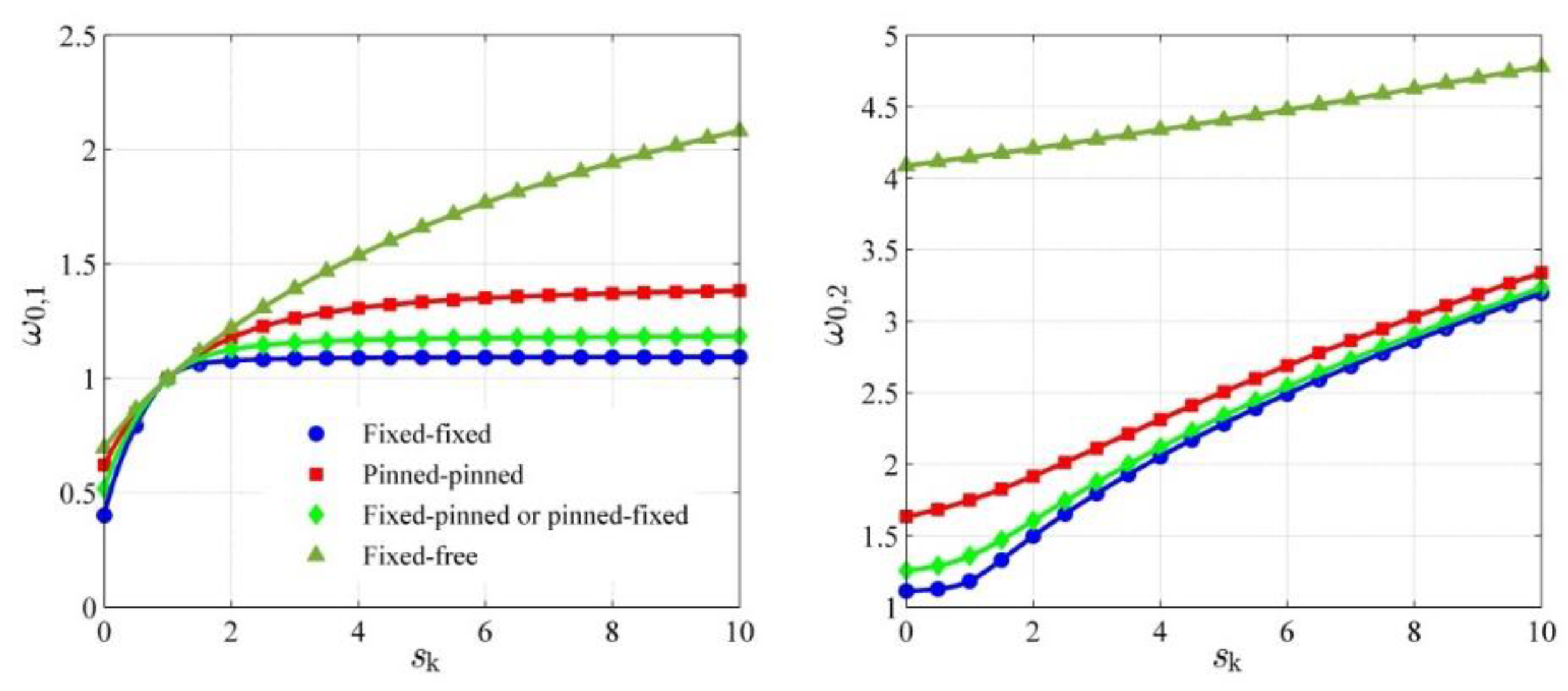
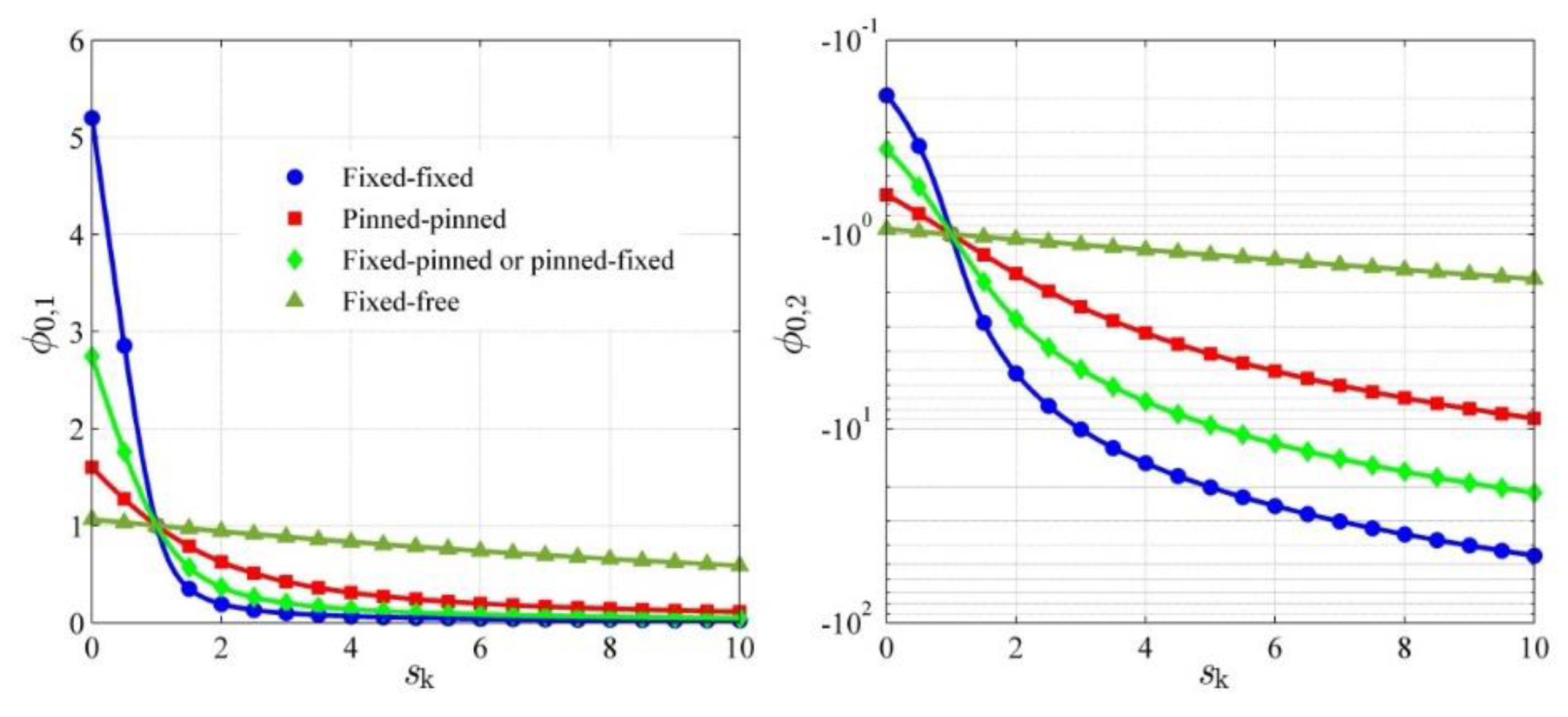
2.3.1. The Order of Basic Mode
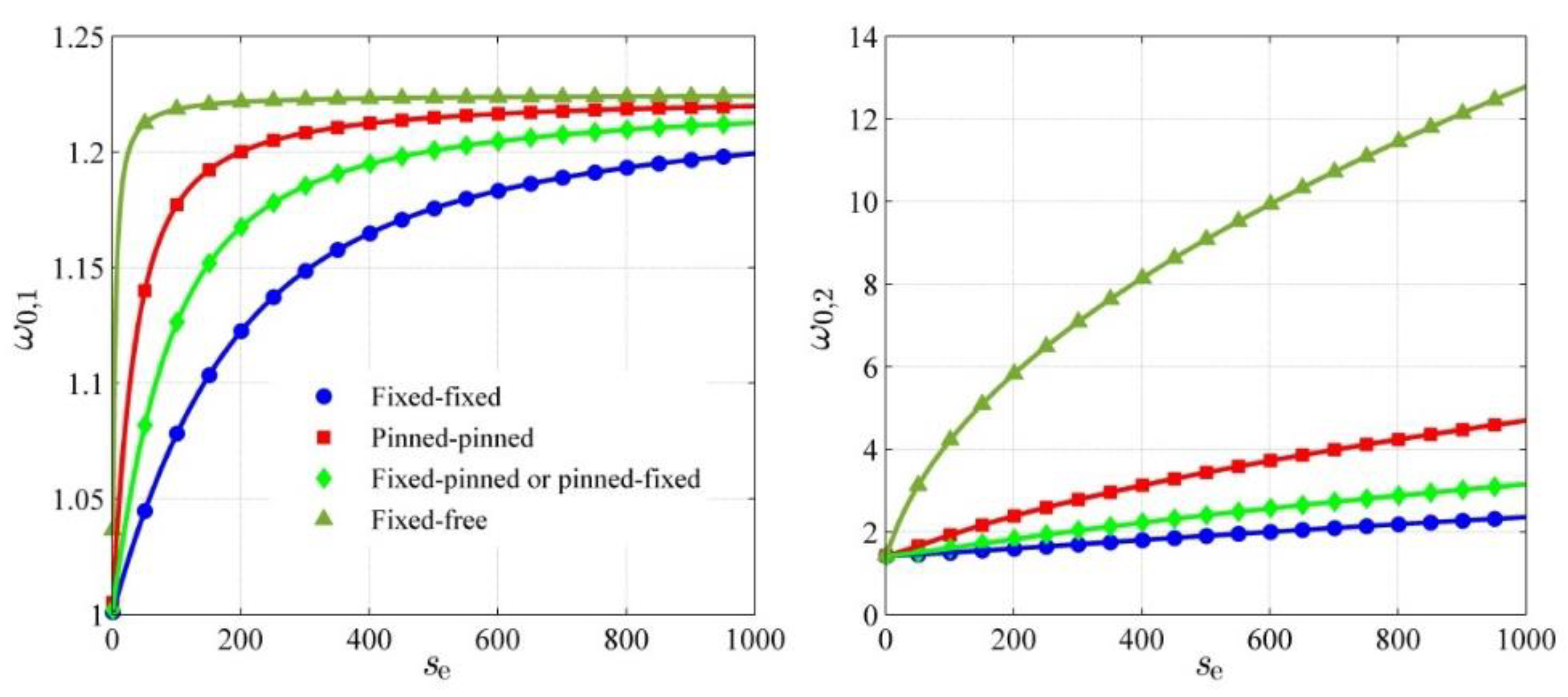
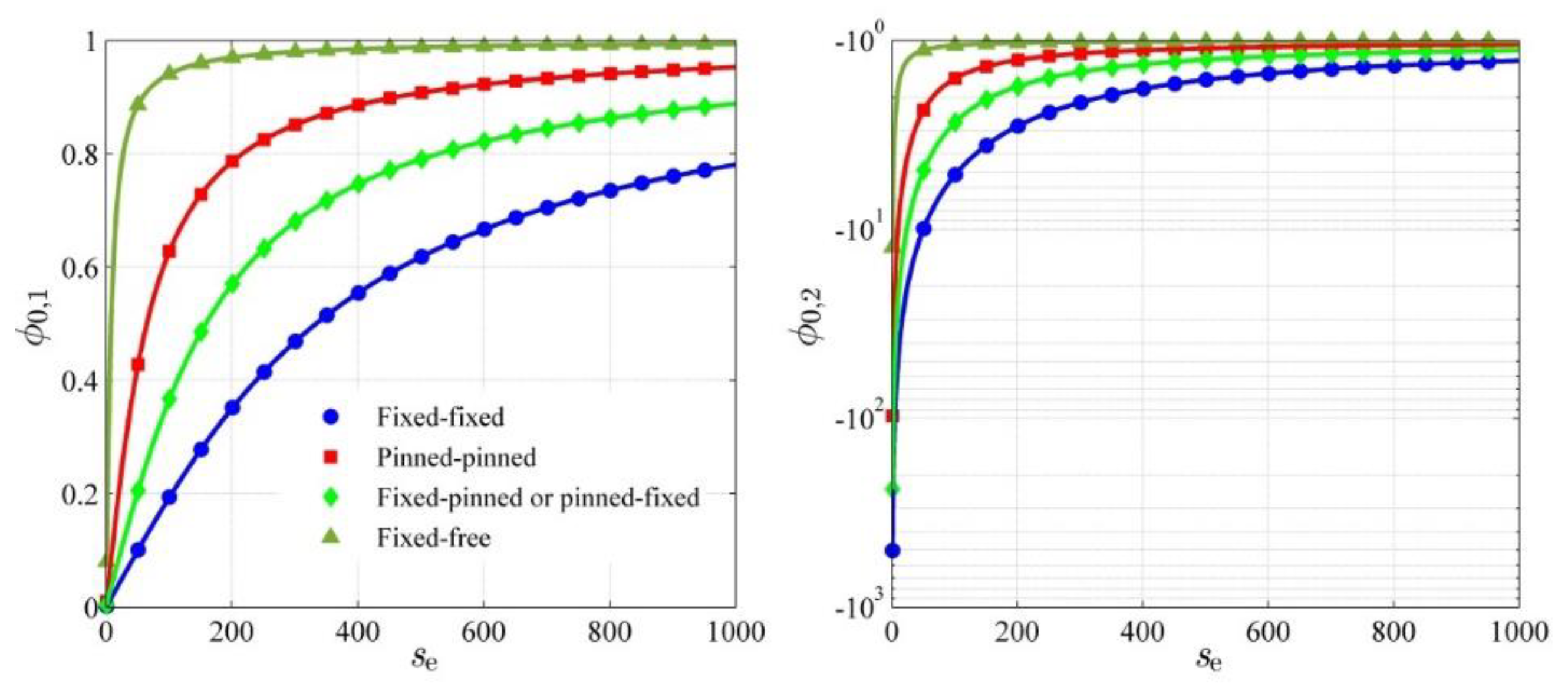
2.3.2. Contact Stiffness Ratio
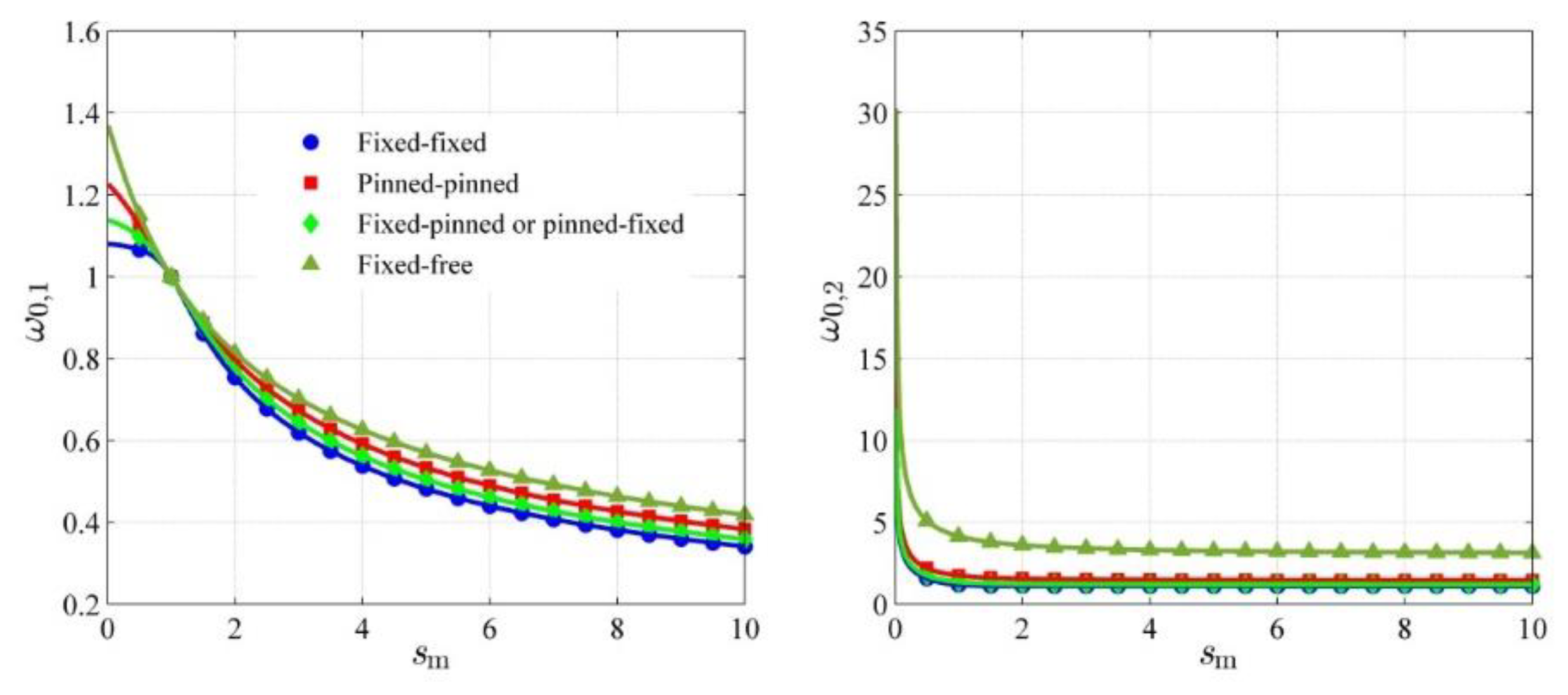
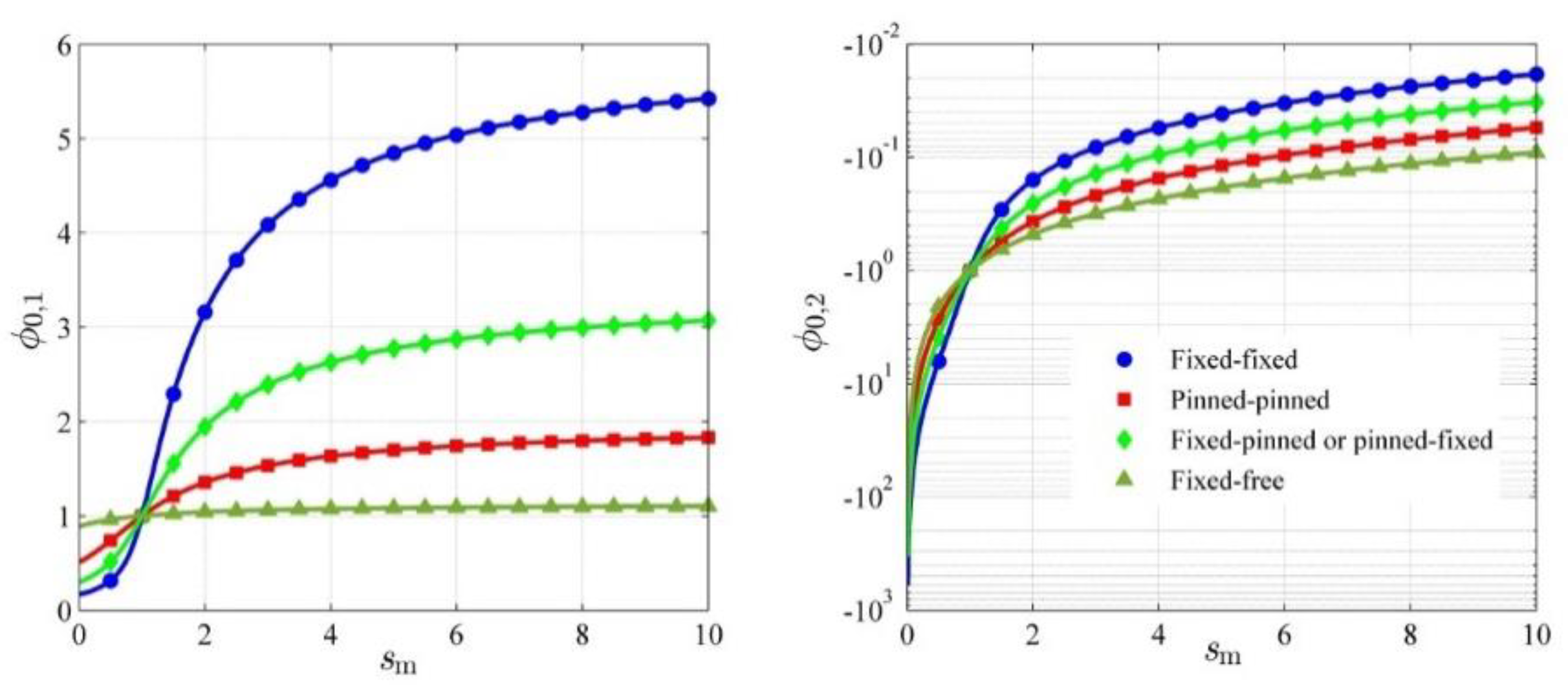
2.3.3. Mass Ratio
2.3.4. Beam Stiffness Ratio
3. Double-Beam System Traversed by a Moving Force
3.1. Mathematical Formulation
3.1.1. Fixed-Fixed and Fixed-Pinned Boundary Conditions
3.1.2. Pinned-Pinned Boundary Conditions
3.1.3. Pinned-Fixed Boundary Conditions
3.1.4. Fixed-Free Boundary Conditions
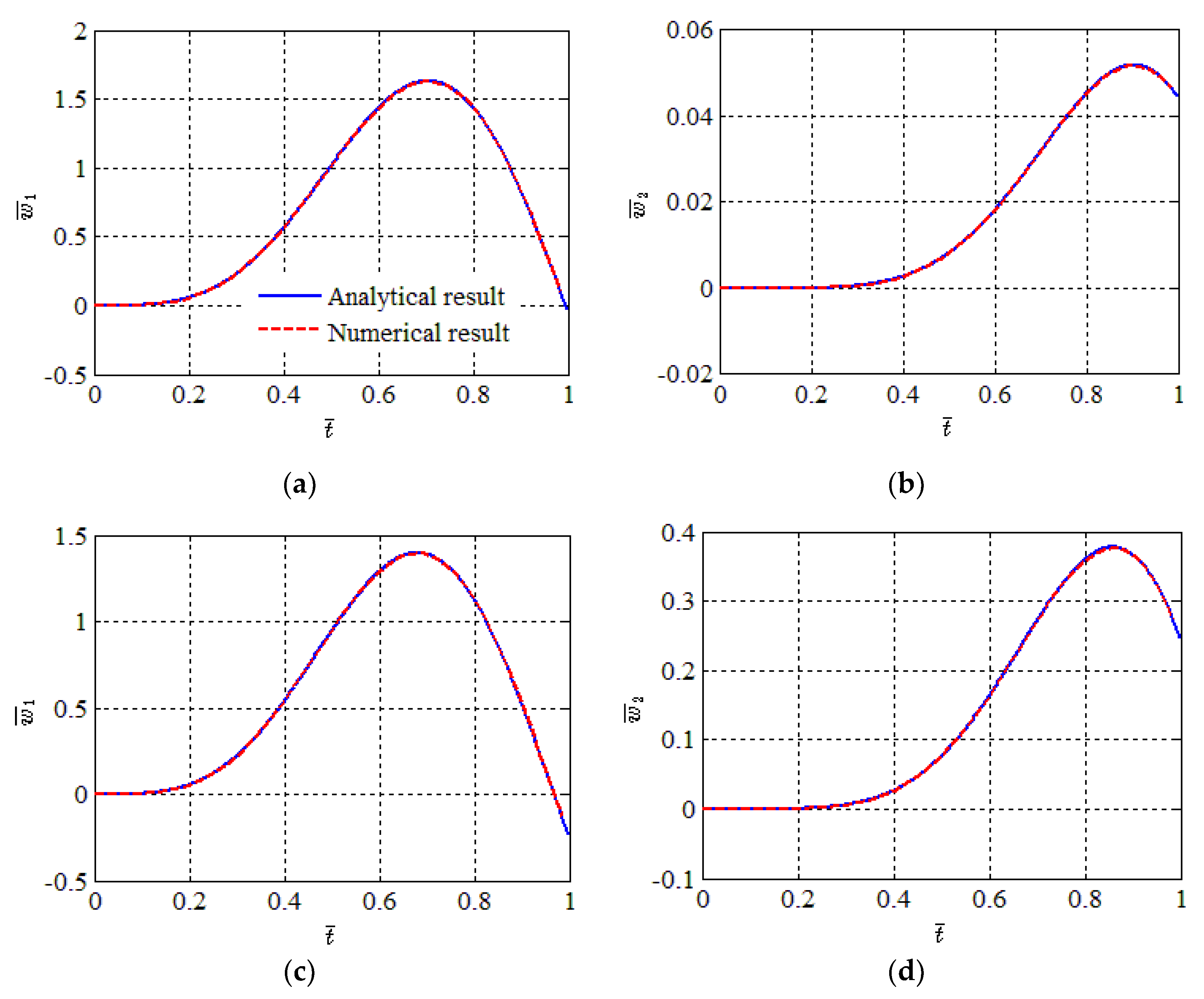
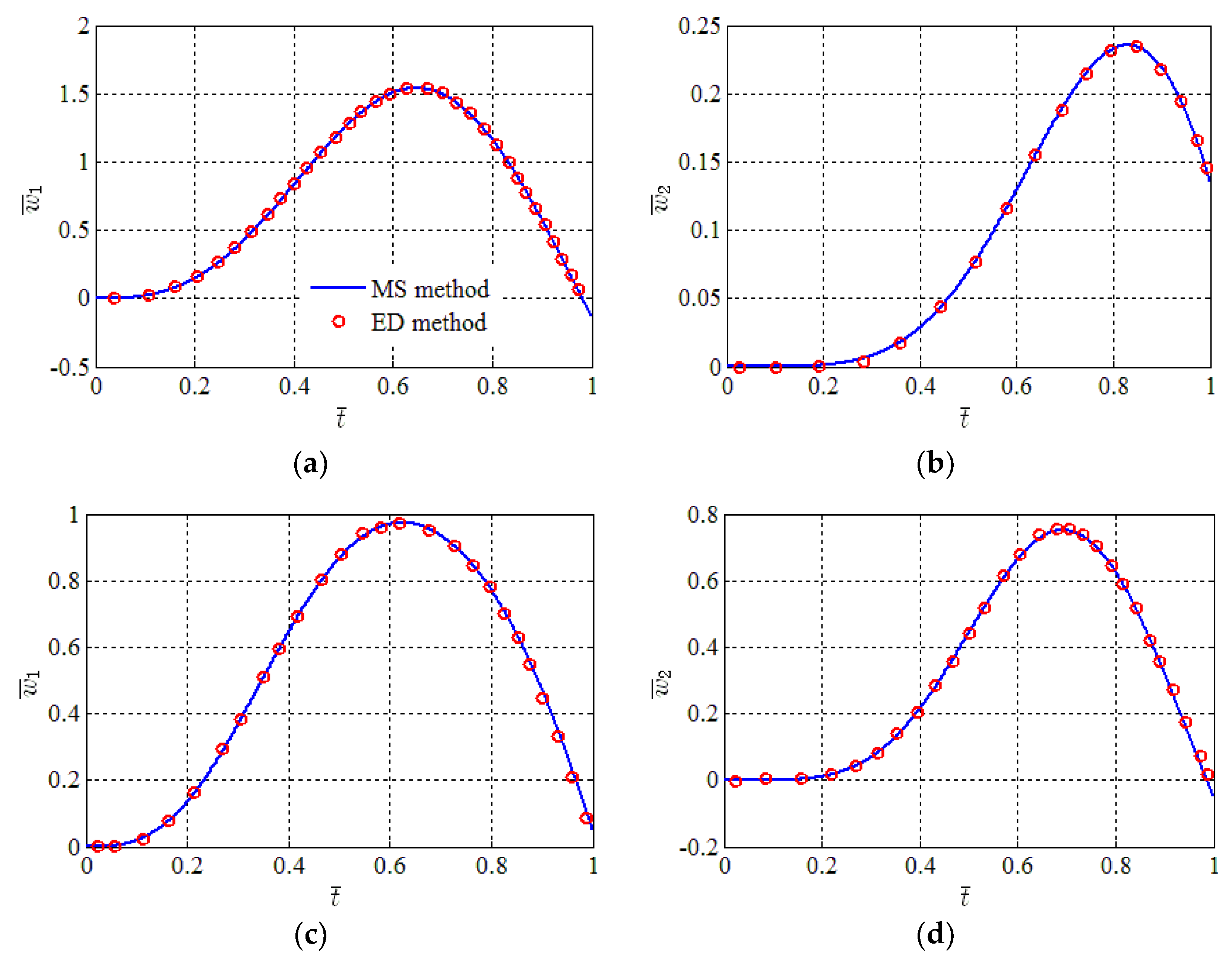
3.2. Verification of the Analytical Solutions in Section 3.1
3.2.1. Fixed-Fixed Boundary Conditions
3.2.2. Pinned-Pinned Boundary Conditions
3.3. Parametric Studies
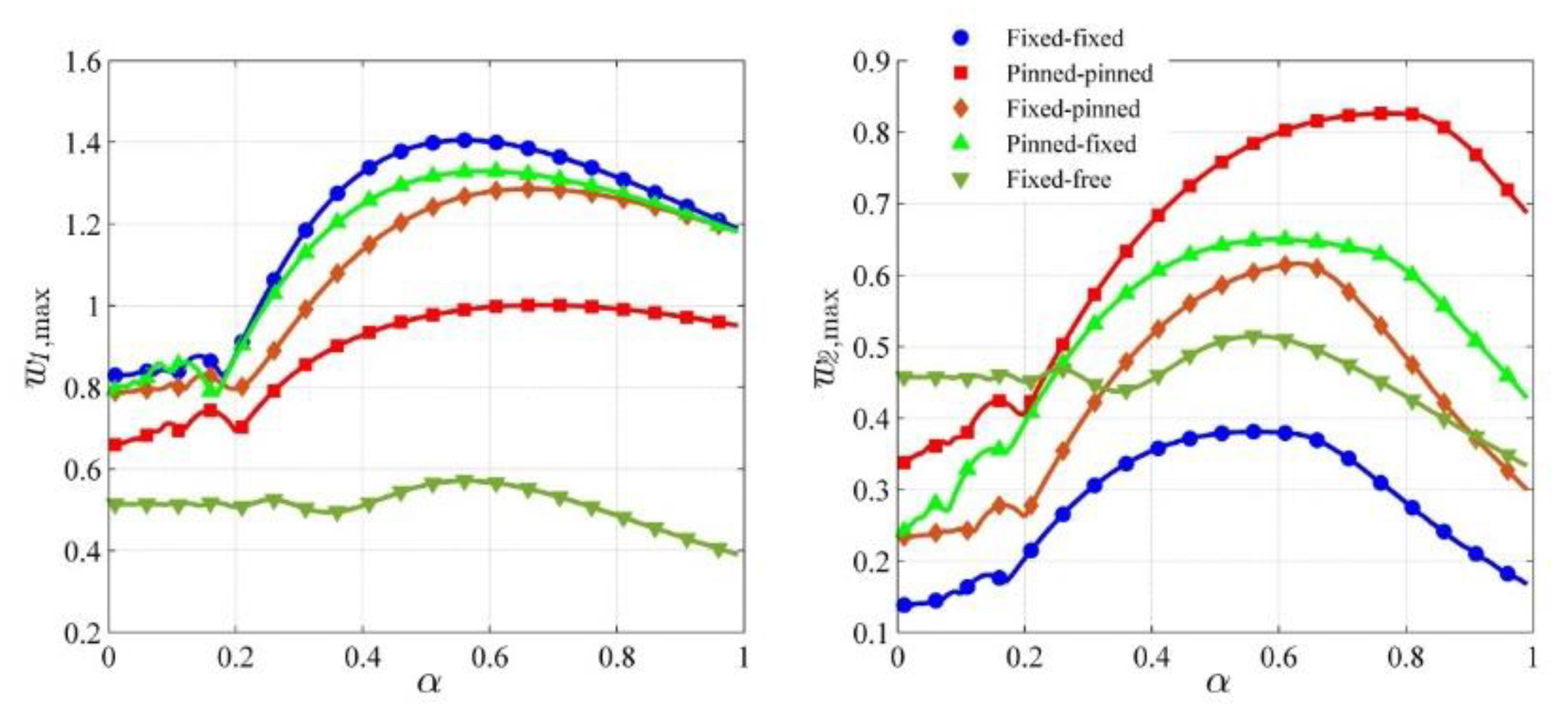
3.3.1. Speed Ratio
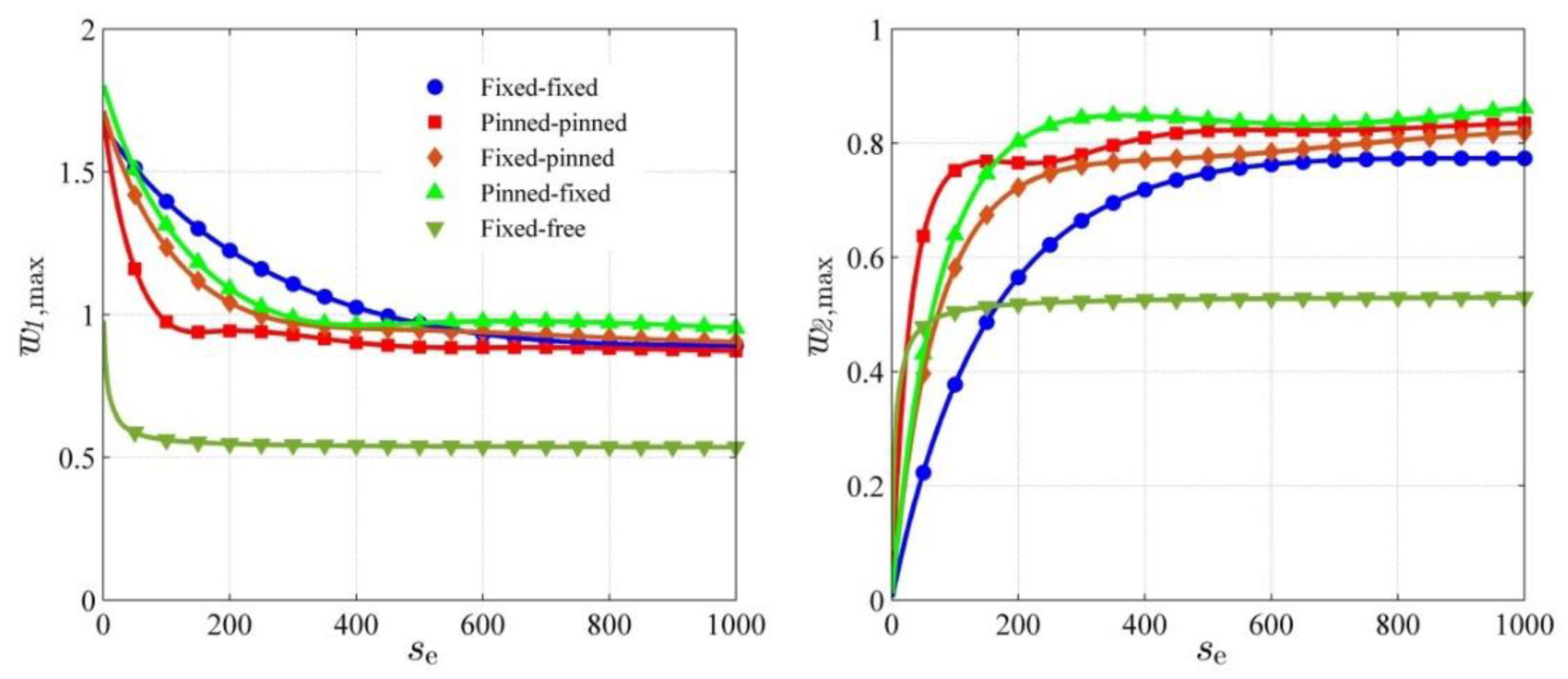
3.3.2. Contact Stiffness Ratio
- generally decreases with and the opposite trend is true for ;
- The varying rates of are very large when is below a turning point and become much smaller when is beyond the turning point;
- With the increase of , and tend to be the same value which is half of that for a single beam with the same boundary conditions and at the same values of , and ;
- The difference between and is generally smaller for looser boundary conditions.
3.3.3. Mass Ratio
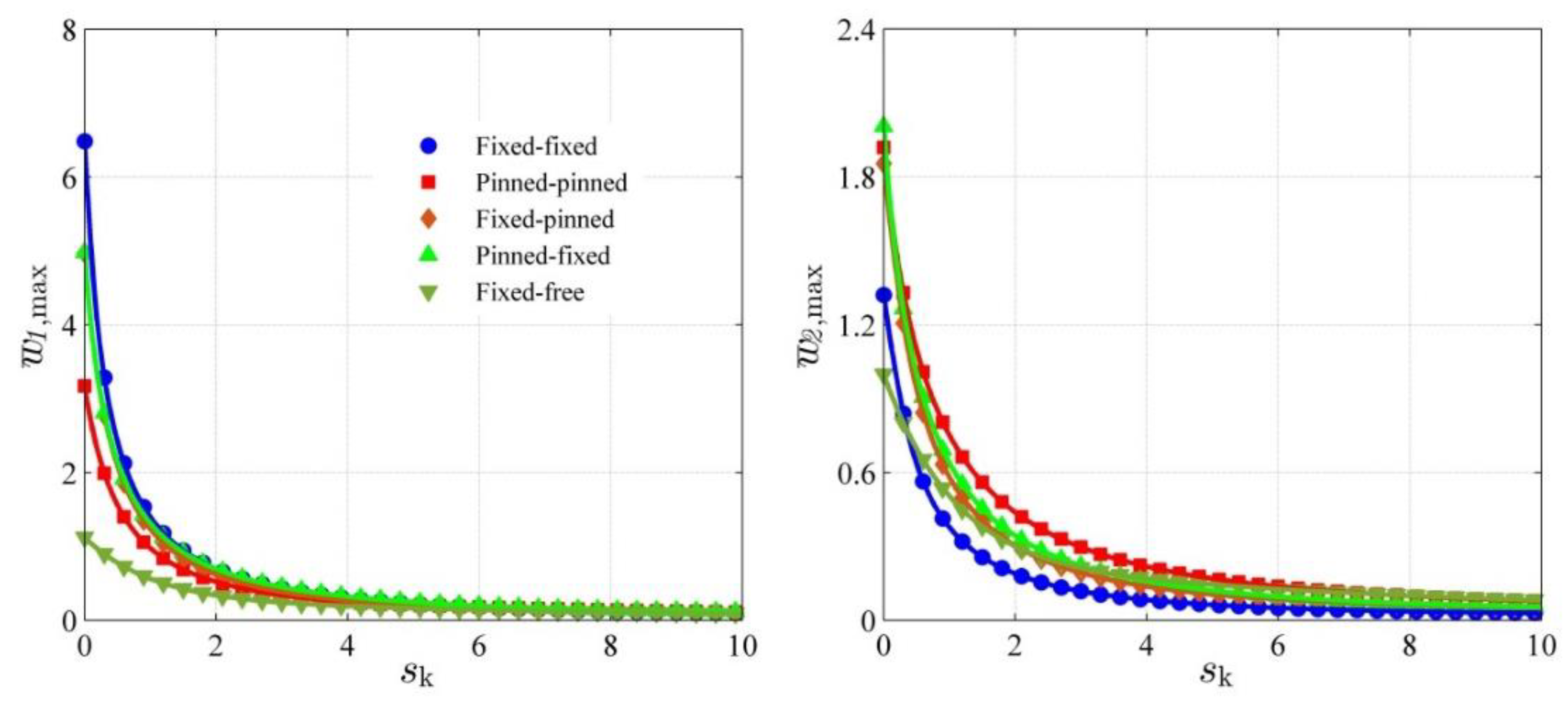
3.3.4. Beam Stiffness Ratio
4. Conclusions
- (1)
- Each wavenumber corresponds to two sub-modes of the system. The mode shapes of one beam of the system are the same as those for the single beam with the same boundary condition. The amplitudes of the mode shapes for one beam of the double-beam system are the multiple of those for the other beam of the system.
- (2)
- The two sub-modes corresponding to the first wavenumber both make significant contributions to the dynamics of the system under a moving load, which is different from the case for a single beam.
- (3)
- The maximum dynamic displacement of the primary beam generally decreases with the stiffness of the contact springs. The opposite trend is true for the maximum dynamic displacement of the secondary beam. The two beams vibrate together when the contact springs are very stiff. With the increase of the ratio between the mass of the primary beam and the secondary beam, the maximum dynamic displacement ratios of both beams increases first and then decreases. The maximum dynamic displacement ratios of both beams are smaller for a larger bending stiffness ratio of the primary beam to the secondary beam.
- (4)
- The primary beam tends to vibrate together with the secondary beam when the boundary condition of the system is looser.
Author Contributions
Funding
Conflicts of Interest
References
- Hussein, M.F.M.; Hunt, H.E.M. Modelling of floating-slab tracks with continuous slabs under oscillating moving loads. J. Sound Vib. 2006, 297, 37–54. [Google Scholar] [CrossRef]
- Cheng, Y.S.; Au, F.T.K.; Cheung, Y.K. Vibration of railway bridges under a moving train by using bridge-track-vehicle element. Eng. Struct. 2001, 23, 1597–1606. [Google Scholar] [CrossRef]
- Lou, P. Finite element analysis for train–track–bridge interaction system. Arch. Appl. Mech. 2007, 77, 707–728. [Google Scholar] [CrossRef]
- Galuppi, L.; Royer-Carfagni, G. Laminated beams with viscoelastic interlayer. Int. J. Solids Struct. 2012, 49, 2637–2645. [Google Scholar] [CrossRef]
- Hamada, T.R.; Nakayama, H.; Hayashi, K. Free and forced vibrations of elastically connected double-beam systems. Bull. JSME 1983, 26, 1936–1942. [Google Scholar] [CrossRef]
- Chen, Y.H.; Sheu, J.T. Dynamic characteristics of layered beam with flexible core. J. Vib. Acoust. 1994, 116, 350–356. [Google Scholar] [CrossRef]
- Rahmani, O.; Norouzi, S.; Golmohammadi, H.; Hosseini, S.A.H. Dynamic response of a double, single-walled carbon nanotube under a moving nanoparticle based on modified nonlocal elasticity theory considering surface effects. Mech. Adv. Mater. Struct. 2017, 24, 1274–1291. [Google Scholar] [CrossRef]
- Seelig, J.M.; Hoppmann, W.H., II. Normal mode vibrations of systems of elastically connected parallel bars. J. Acoust. Soc. Am. 1964, 36, 93–99. [Google Scholar] [CrossRef]
- Rao, S.S. Natural vibrations of systems of elastically connected Timoshenko beams. J. Acoust. Soc. Am. 1974, 55, 1232–1237. [Google Scholar] [CrossRef]
- Oniszczuk, Z. Free Transverse Vibrations Of Elastically Connected Simply Supported Double-Beam Complex System. J. Sound Vib. 2000, 232, 387–403. [Google Scholar] [CrossRef]
- Mirzabeigy, A.; Dabbagh, V.; Madoliat, R. Explicit formulation for natural frequencies of double-beam system with arbitrary boundary conditions. J. Mech. Sci. Technol. 2017, 31, 515–521. [Google Scholar] [CrossRef]
- Han, F.; Dan, D.; Cheng, W. An exact solution for dynamic analysis of a complex double-beam system. Compos. Struct. 2018, 193, 295–305. [Google Scholar] [CrossRef]
- Hao, Q.; Zhai, W.; Chen, Z. Free vibration of connected double-beam system with general boundary conditions by a modified Fourier–Ritz method. Arch. Appl. Mech. 2018, 88, 741–754. [Google Scholar] [CrossRef]
- Xiang, P.; Zhao, Y.; Lin, J.; Kennedy, D.; Williams, F.W. Random vibration analysis for coupled vehicle-track systems with uncertain parameters. Eng. Comput. 2016, 33, 443–464. [Google Scholar] [CrossRef]
- Kordestani, H.; Xiang, Y.-Q.; Ye, X.-W.; Jia, Y.-K. Application of the Random Decrement Technique in Damage Detection under Moving Load. Appl. Sci. 2018, 8, 753. [Google Scholar] [CrossRef]
- Wang, W.; Deng, L.; Shao, X. Number of stress cycles for fatigue design of simply-supported steel I-girder bridges considering the dynamic effect of vehicle loading. Eng. Struct. 2016, 110, 70–78. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, B.; Zhang, N.; Zheng, M. A Condensation Method for the Dynamic Analysis of Vertical Vehicle–Track Interaction Considering Vehicle Flexibility. J. Vib. Acoust. 2015, 137, 041010. [Google Scholar] [CrossRef]
- Vu, H.V.; OrdÓÑEz, A.M.; Karnopp, B.H. Vibration of a Double-Beam System. J. Sound Vib. 2000, 229, 807–822. [Google Scholar] [CrossRef]
- Abu-Hilal, M. Dynamic response of a double Euler–Bernoulli beam due to a moving constant load. J. Sound Vib. 2006, 297, 477–491. [Google Scholar] [CrossRef]
- Wu, Y.; Gao, Y. Analytical Solutions for Simply Supported Viscously Damped Double-Beam System under Moving Harmonic Loads. J. Eng. Mech. 2015, 141, 04015004. [Google Scholar] [CrossRef]
- Wu, Y.; Gao, Y. Dynamic response of a simply supported viscously damped double-beam system under the moving oscillator. J. Sound Vib. 2016, 384, 194–209. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Lu, Y.; Ma, G.W. Effect of compressive axial load on forced transverse vibrations of a double-beam system. Int. J. Mech. Sci. 2008, 50, 299–305. [Google Scholar] [CrossRef]
- Kessel, P.G. Resonances Excited in an Elastically Connected Double-Beam System by a Cyclic Moving Load. J. Acoust. Soc. Am. 1966, 40, 684–687. [Google Scholar] [CrossRef]
- Kessel, P.G.; Raske, T.F. Damped Response of an Elastically Connected Double-Beam System Due to a Cyclic Moving Load. J. Acoust. Soc. Am. 1967, 42, 873–881. [Google Scholar] [CrossRef]
- Oniszczuk, Z. Forced transverse vibrations of an elastically connected complex simply supported double-beam system. J. Sound Vib. 2003, 264, 273–286. [Google Scholar] [CrossRef]
- Chonan, S. Dynamical behaviors of elastically connected double-beam systems subjected to an impulsive load. Bull. JSME 1976, 19, 595–603. [Google Scholar] [CrossRef]
- Pavlović, R.; Kozić, P.; Pavlović, I. Dynamic stability and instability of a double-beam system subjected to random forces. Int. J. Mech. Sci. 2012, 62, 111–119. [Google Scholar] [CrossRef]
- Stojanović, V.; Kozić, P. Forced transverse vibration of Rayleigh and Timoshenko double-beam system with effect of compressive axial load. Int. J. Mech. Sci. 2012, 60, 59–71. [Google Scholar] [CrossRef]
- Kozić, P.; Pavlović, R.; Karličić, D. The flexural vibration and buckling of the elastically connected parallel-beams with a Kerr-type layer in between. Mech. Res. Commun. 2014, 56, 83–89. [Google Scholar] [CrossRef]
- Kukla, S.; Skalmierski, B. Free vibration of a system composed of two beams separated by an elastic layer. J. Theor. Appl. Mech. 1994, 3, 581–590. [Google Scholar]
- Mao, Q.; Wattanasakulpong, N. Vibration and stability of a double-beam system interconnected by an elastic foundation under conservative and nonconservative axial forces. Int. J. Mech. Sci. 2015, 93, 1–7. [Google Scholar] [CrossRef]
- Li, Y.X.; Sun, L.Z. Transverse vibration of undamped elastically connected double-beam system with arbitrary boundary conditions. J. Eng. Mech. 2016, 142, 04015070. [Google Scholar] [CrossRef]
- Li, Y.X.; Hu, Z.J.; Sun, L.Z. Dynamical behavior of a double-beam system interconnected by a viscoelastic layer. Int. J. Mech. Sci. 2016, 105, 291–303. [Google Scholar] [CrossRef]
- Şimşek, M.; Cansız, S. Dynamics of elastically connected double-functionally graded beam systems with different boundary conditions under action of a moving harmonic load. Compos. Struct. 2012, 94, 2861–2878. [Google Scholar] [CrossRef]
- Zhang, Z.; Huang, X.; Zhang, Z.; Hua, H. On the transverse vibration of Timoshenko double-beam systems coupled with various discontinuities. Int. J. Mech. Sci. 2014, 89, 222–241. [Google Scholar] [CrossRef]
- Chen, Y.H.; Sheu, J.T. Beam on viscoelastic foundation and layered beam. J. Eng. Mech. 1995, 121, 340–344. [Google Scholar] [CrossRef]
- Li, J.; Hua, H. Spectral finite element analysis of elastically connected double-beam systems. Finite Elem. Anal. Des. 2007, 43, 1155–1168. [Google Scholar] [CrossRef]
- Palmeri, A.; Adhikari, S. A Galerkin-type state-space approach for transverse vibrations of slender double-beam systems with viscoelastic inner layer. J. Sound Vib. 2011, 330, 6372–6386. [Google Scholar] [CrossRef]
- Jun, L.; Hongxing, H.; Xiaobin, L. Dynamic stiffness matrix of an axially loaded slender double-beam element. Struct. Eng. Mech. 2010, 35, 717–733. [Google Scholar] [CrossRef]
- Lou, P. A vehicle-track-bridge interaction element considering vehicle’s pitching effect. Finite Elem. Anal. Des. 2005, 41, 397–427. [Google Scholar] [CrossRef]
- Jing, H.; He, X.; Zou, Y.; Wang, H. In-plane modal frequencies and mode shapes of two stay cables interconnected by uniformly distributed cross-ties. J. Sound Vib. 2018, 417, 38–55. [Google Scholar] [CrossRef]
- Yang, J.; Ouyang, H.; Stǎncioiu, D. Numerical studies of vibration of four-span continuous plate with rails excited by moving car with experimental validation. Int. J. Struct. Stab. Dyn. 2017, 17, 2039–2060. [Google Scholar] [CrossRef]
- Yang, J.; Ouyang, H.; Stǎncioiu, D. An approach of solving moving load problems by Abaqus and Matlab using numerical modes. In Proceedings of the 7th International Conference on Vibration Engineering, Shanghai, China, 18–20 September 2015. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 4.73 | 7.8532 | 10.9956 | 14.1372 | 17.2788 | 20.4204 |
| Mode | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 3.9266 | 7.0686 | 10.2102 | 13.3518 | 16.4934 | 19.6350 |
| Mode | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 1.8751 | 4.6941 | 7.8548 | 10.9955 | 14.1372 | 17.2788 |
| Mode Number | Frequency (Hz) | Difference | |
|---|---|---|---|
| FE | Analytical | (%) | |
| 1 | 16.12 | 16.12 | 0 |
| 2 | 44.44 | 44.44 | 0 |
| 3 | 87.08 | 87.08 | 0 |
| 4 | 143.66 | 143.68 | 0 |
| 5 | 179.90 | 180.72 | 0.5 |
| 6 | 180.03 | 180.85 | 0.5 |
| 7 | 180.49 | 181.31 | 0.5 |
| 8 | 181.77 | 182.59 | 0.5 |
| 9 | 182.20 | 183.01 | 0.4 |
| 10 | 185.72 | 186.57 | 0.5 |
| 11 | 190.52 | 191.38 | 0.5 |
| 12 | 197.36 | 198.23 | 0.4 |
| 13 | 206.69 | 207.61 | 0.4 |
| 14 | 216.22 | 216.24 | 0 |
| 15 | 218.82 | 219.77 | 0.4 |
| 16 | 233.99 | 234.96 | 0.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; He, X.; Jing, H.; Wang, H.; Tinmitonde, S. Dynamics of Double-Beam System with Various Symmetric Boundary Conditions Traversed by a Moving Force: Analytical Analyses. Appl. Sci. 2019, 9, 1218. https://doi.org/10.3390/app9061218
Yang J, He X, Jing H, Wang H, Tinmitonde S. Dynamics of Double-Beam System with Various Symmetric Boundary Conditions Traversed by a Moving Force: Analytical Analyses. Applied Sciences. 2019; 9(6):1218. https://doi.org/10.3390/app9061218
Chicago/Turabian StyleYang, Jing, Xuhui He, Haiquan Jing, Hanfeng Wang, and Sévérin Tinmitonde. 2019. "Dynamics of Double-Beam System with Various Symmetric Boundary Conditions Traversed by a Moving Force: Analytical Analyses" Applied Sciences 9, no. 6: 1218. https://doi.org/10.3390/app9061218
APA StyleYang, J., He, X., Jing, H., Wang, H., & Tinmitonde, S. (2019). Dynamics of Double-Beam System with Various Symmetric Boundary Conditions Traversed by a Moving Force: Analytical Analyses. Applied Sciences, 9(6), 1218. https://doi.org/10.3390/app9061218