Virtual Scene Construction for Seismic Damage of Building Ceilings and Furniture


Abstract

1. Introduction
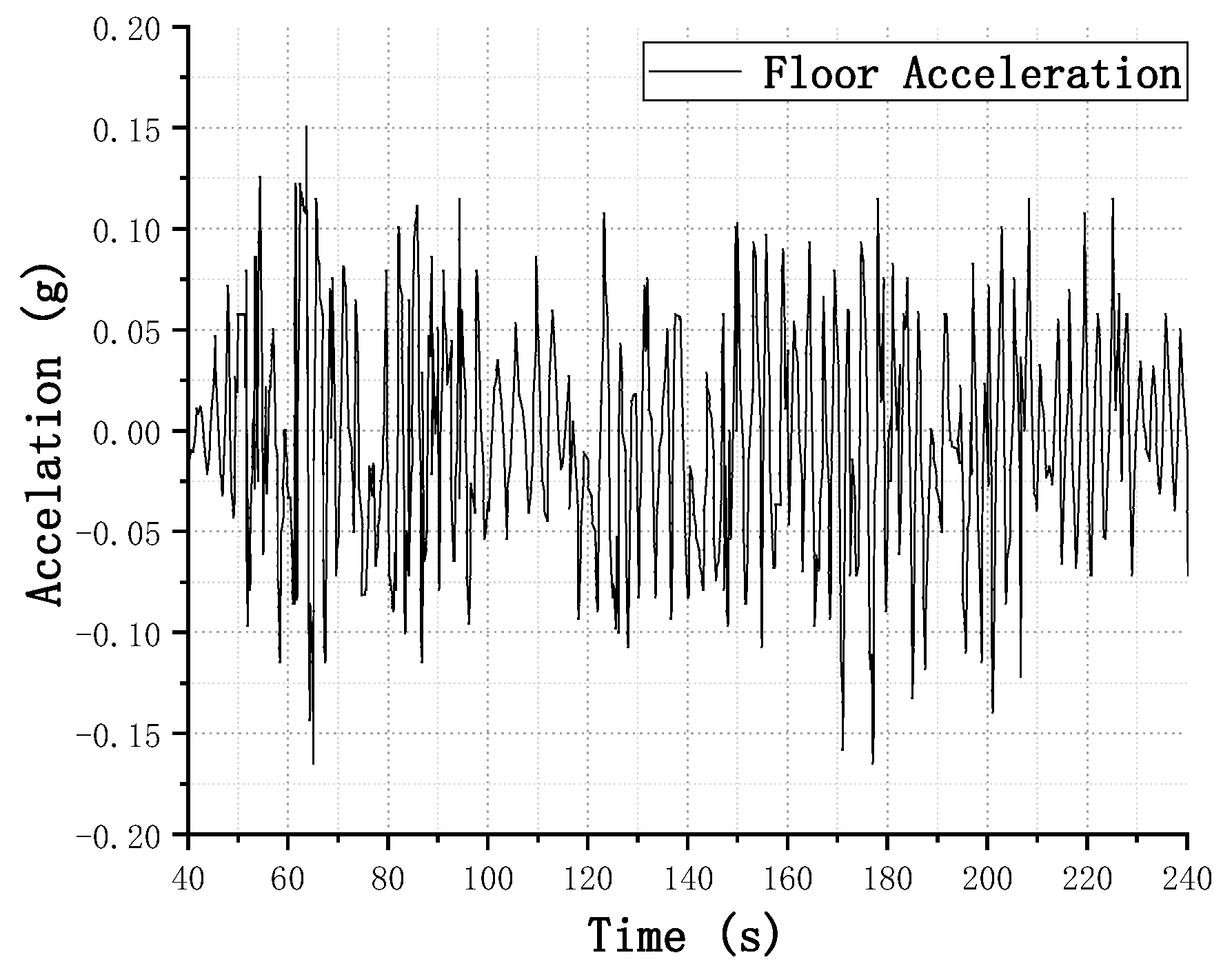
- How will the required structural seismic dynamic responses of nonstructural components be obtained? The seismic damage to nonstructural components depends on the structural seismic dynamic responses (e.g., floor drifts and accelerations), and thus obtaining these results is essential for constructing a seismic damage scene.
- How will the damage states (DSs) of nonstructural components be determined? A criterion is necessary to determine the DSs of nonstructural components based on specific values of the structural seismic response.
- How will the subsequent movements of the damaged nonstructural components be simulated? After a nonstructural component is damaged, it will undergo a complex subsequent movement, e.g., a ceiling tile will fall when it breaks away from the suspended ceiling. Therefore, the subsequent movements of damaged nonstructural components need to be simulated to create a valid virtual scene of indoor seismic damage.
2. Framework
3. Technical Method
3.1. BIM-Based Modeling and THA
3.2. Damage Prediction for Suspended Ceilings and Moveable Furniture
3.3. Simulation of the Movement of Damaged Nonstructural Components
3.3.1. Suspended Ceilings
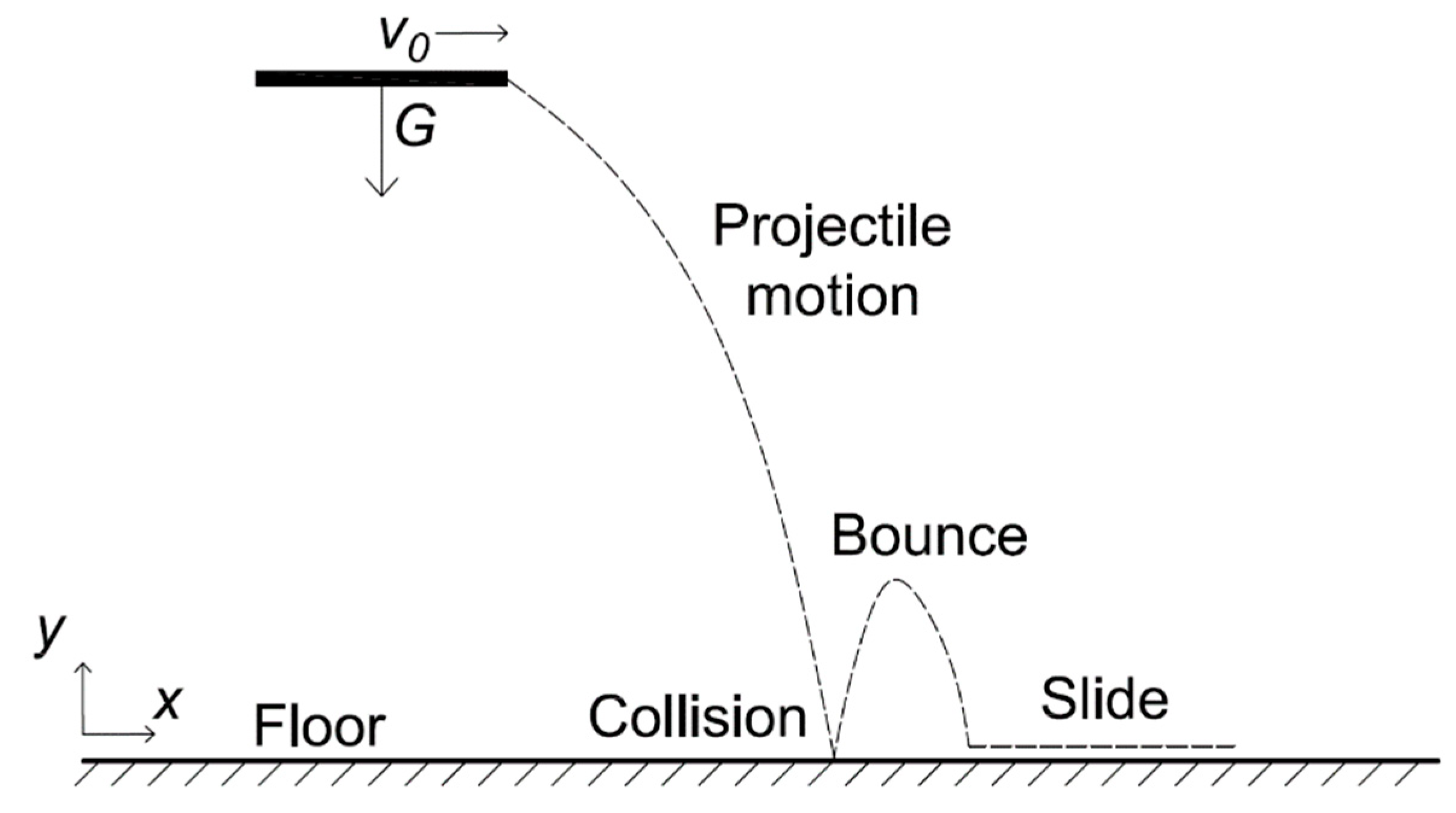
3.3.2. Movable furniture
4. Case Study
4.1. Overview
4.2. Model Conversion and Structural THA
4.3. Damage Prediction
4.4. Movement Simulation
4.4.1. Suspended Ceilings
4.4.2. Movable Furniture
4.4.3. Integrated Indoor Earthquake Scene
4.5. Technical Evaluation
4.6. Parametric Study
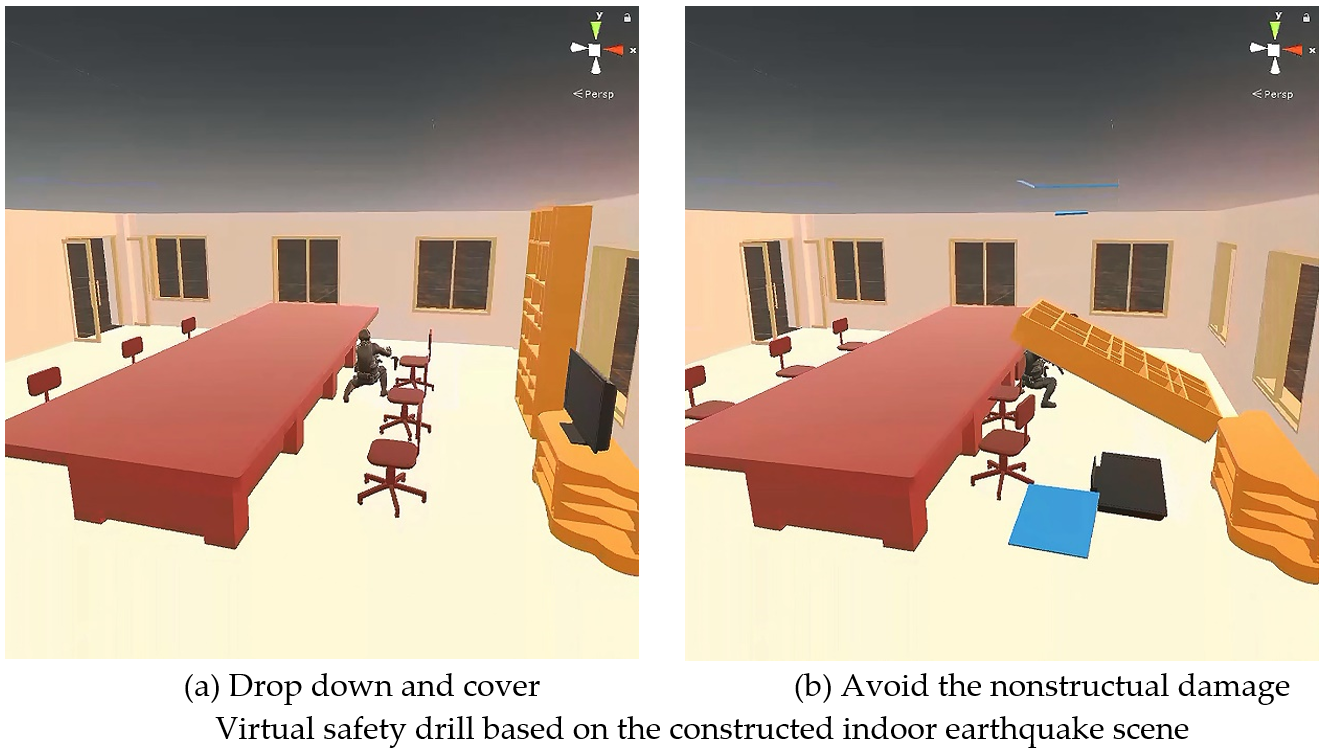
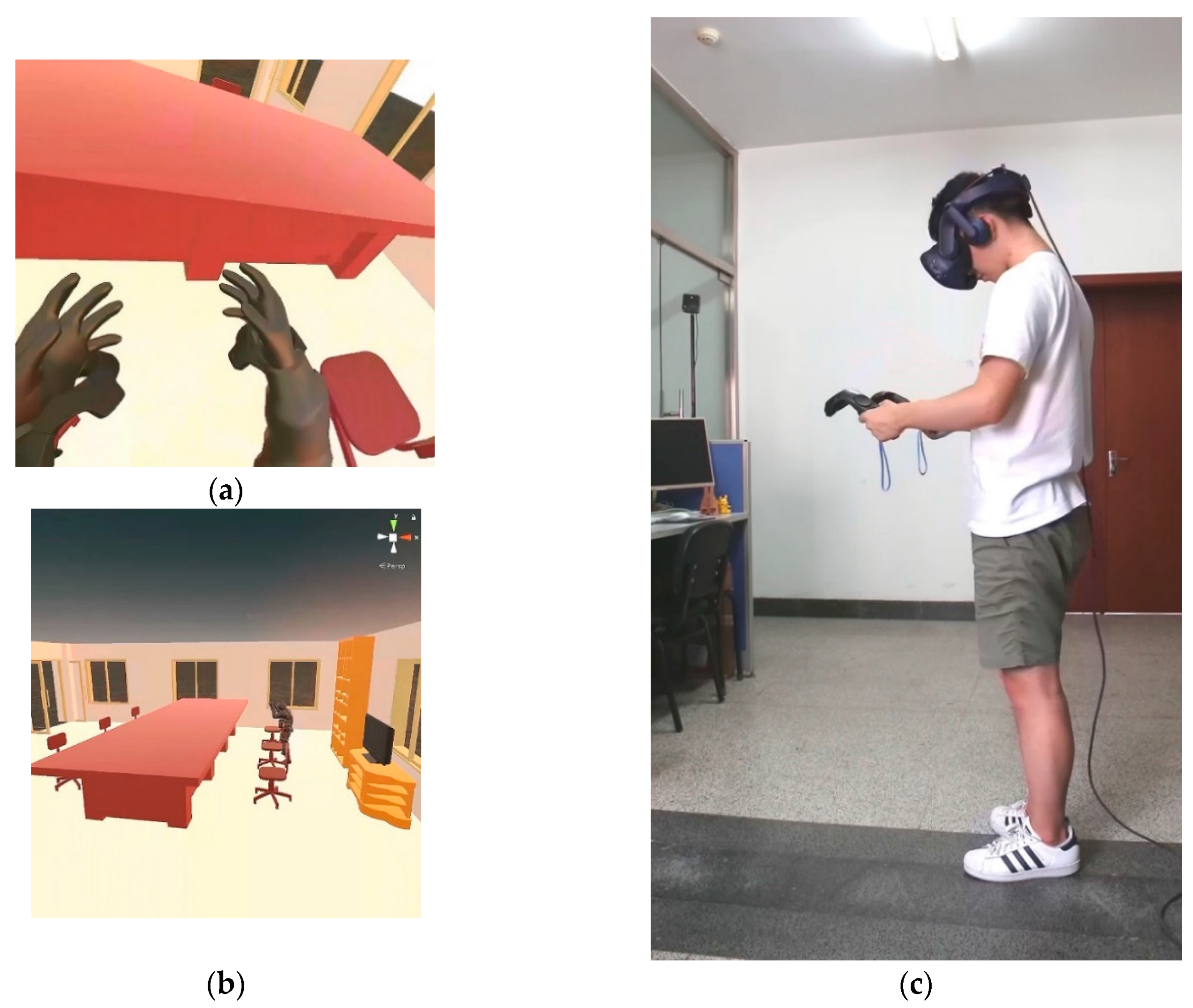
4.7. Virtual Earthquake Safety Drill
5. Conclusions
- The designed BIM-based modeling solution can efficiently create the consistent structural analysis and VR models of a building.
- The solution based on structural seismic THA and FEMA P-58 can provide detailed seismic damage results required to construct the earthquake scene for nonstructural components.
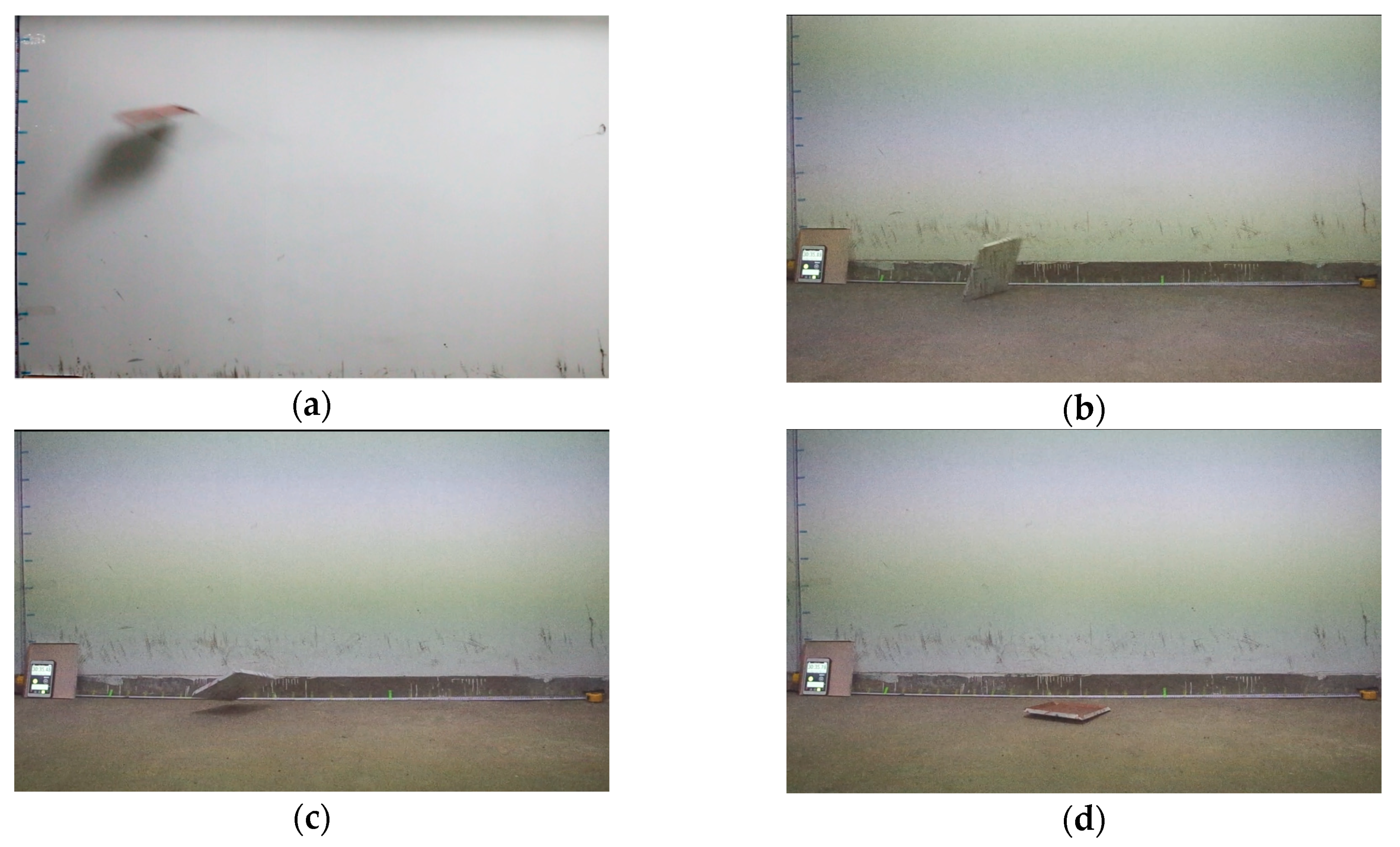
- Physical models and corresponding physics-engine-based implementation of suspended ceilings and moveable furniture are created, allowing the movement of these components to be simulated reasonably.
- The proposed method constructs a well-founded scene representing the seismic damage to indoor nonstructural components, which can be used to perform virtual indoor earthquake safety drills and thus improve the earthquake survival ability of occupants.
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application Programming Interface | API | Inter-Story Drift Ratio | IDR |
|---|---|---|---|
| Artificial intelligence | AI | National Research Institute for Earth Science and Disaster Resilience | NIED |
| Building information modeling | BIM | Peak floor acceleration | PFA |
| Damage state | DS | Performance group | PG |
| Federal Emergency Management Agency | FEMA | Peak ground acceleration | PGA |
| Filmbox | FBX | Three-dimensional | 3D |
| Engineering demand parameter | EDP | Time-history analysis | THA |
| Identity document | ID | Virtual reality | VR |
| Industry foundation classes | IFC | Yingjianke | YJK |
References
- Lu, X.; Lu, X.; Guan, H.; Ye, L. Collapse simulation of reinforced concrete high-rise building induced by extreme earthquakes. Earthq. Eng. Struct. Dyn. 2013, 42, 705–723. [Google Scholar] [CrossRef]
- Li, Y.; Lu, X.; Guan, H.; Ye, L. An energy-based assessment on dynamic amplification factor for linear static analysis in progressive collapse design of ductile RC frame structures. Adv. Struct. Eng. 2014, 17, 1217–1225. [Google Scholar] [CrossRef]
- Li, Y.; Lu, X.; Guan, H.; Ye, L. Progressive collapse resistance demand of RC frames under catenary mechanism. ACI Struct. J. 2014, 111, 1225–1234. [Google Scholar] [CrossRef]
- Xu, Z.; Lu, X.; Guan, H.; Tian, Y.; Ren, A. Simulation of earthquake-induced hazards of falling exterior non-structural components and its application to emergency shelter design. Nat. Hazards 2016, 80, 935–950. [Google Scholar]
- Xu, Z.; Lu, X.; Guan, H.; Lu, X.; Ren, A. Progressive-collapse simulation and critical region identification of a stone arch bridge. J. Perform. Constr. Facil. 2013, 27, 43–52. [Google Scholar] [CrossRef]
- Xu, Z.; Lu, X.; Guan, H.; Han, B.; Ren, A. Seismic damage simulation in urban areas based on a high-fidelity structural model and a physics engine. Nat. Hazards 2014, 71, 1679–1693. [Google Scholar] [CrossRef]
- Han, L.; Cheng, J.; An, Y.; Fang, L.; Jiang, C.; Chen, B.; Wu, Z.; Liu, J.; Xu, X.; Liu, R.; et al. Preliminary report on the 8 August 2017 Ms 7.0 Jiuzhaigou, Sichuan, China, Earthquake. Seismol. Res. Lett. 2018, 89, 557–569. [Google Scholar] [CrossRef]
- Shi, B.; Liu, G.; Li, L.; Tang, S.; Wang, J.; Xie, M.; Dai, X.; He, J.; Zhang, Y.; Tang, Y.; et al. Injury characteristics and therapeutic strategy of patients injured in “8.8” Jiuzhaigou earthquake. Chin. J. Repar. Reconstr. Surg. 2018, 32, 358–362. [Google Scholar]
- Solinska-Nowak, A.; Magnuszewski, P.; Curl, M.; French, A.; Keating, A.; Mochizuki, J.; Liu, W.; Mechler, R.; Kulakowska, M.; Jarzabek, L. An overview of serious games for disaster risk management–Prospects and limitations for informing actions to arrest increasing risk. Int. J. Disaster Risk Reduct. 2018, 31, 1013–1029. [Google Scholar] [CrossRef]
- Tarnanas, I.; Manos, G.C. Using virtual reality to teach special populations how to cope in crisis: The case of a virtual earthquake. Stud. Health Technol. Inform. 2001, 81, 495–501. [Google Scholar]
- Lovreglio, R.; Gonzalez, V.; Feng, Z.; Amor, R.; Spearpoint, M.; Thomas, J.; Trotter, M.; Sacks, R. Prototyping virtual reality serious games for building earthquake preparedness: The Auckland City Hospital case study. Adv. Eng. Inform. 2018, 38, 670–682. [Google Scholar] [CrossRef]
- Lovreglio, R.; Gonzalez, V.; Amor, R.; Spearpoint, M.; Thomas, J.; Trotter, M.; Sacks, R. The need for enhancing earthquake evacuee safety by using virtual reality serious games. In Proceedings of the Joint Conference on Computing in Construction, Proceedings of the Lean and Computing in Construction Congress: Vol. 1, Heraklion, Greece, 16–21 Jul 2017; Heriot-Watt University: Edinburgh, UK, 2017; pp. 381–389. [Google Scholar]
- Kuester, F.; Hutchinson, T.C. A virtualized laboratory for earthquake engineering education. Comput. Appl. Eng. Educ. 2007, 15, 15–29. [Google Scholar] [CrossRef]
- Shin, Y.S. Virtual reality simulations in Web-based science education. Comput. Appl. Eng. Educ. 2002, 10, 18–25. [Google Scholar] [CrossRef]
- Xu, F.; Chen, X.; Ren, A.; Lu, X. Earthquake disaster simulation for an urban area, with GIS, CAD, FEA, and VR integration. Tsinghua Sci. Technol. 2008, 13, 311–316. [Google Scholar] [CrossRef]
- Li, C.; Liang, W.; Quigley, C.; Zhao, Y.; Yu, L.-F. Earthquake safety training through virtual drills. IEEE Trans. Vis. Comput. Graph. 2017, 23, 1275–1284. [Google Scholar] [CrossRef] [PubMed]
- Volk, R.; Stengel, J.; Schultmann, F. Building Information Modeling (BIM) for existing buildings—Literature review and future needs. Autom. Constr. 2014, 38, 109–127. [Google Scholar] [CrossRef]
- Autodesk. Revit: Multidisciplinary Bim Software for Higher Quality, Coordinated Designs. Available online: https://www.autodesk.com/products/revit/overview (accessed on 5 January 2019).
- Trimble. Tekla: The Most Advanced Bim Software for Structural Workflow. Available online: https://www.tekla.com/products/tekla-structures (accessed on 7 January 2019).
- Eastman, C.M. Industry Foundation Classes. In Building Product Models; CRC Press: Boca Raton, FL, USA, 2018; pp. 279–318. [Google Scholar] [CrossRef]
- Federal Emergency Management Agency (FEMA). Seismic Performance Assessment of Buildings: Volume 1—Methodology; FEMA: Washington, DC, USA, 2012.
- Federal Emergency Management Agency (FEMA). Seismic Performance Assessment of Buildings: Volume 2—Implementation; FEMA: Washington, DC, USA, 2012.
- Millington, I. Game Physics Engine Development: How to Build a Robust Commercial-Grade Physics Engine for your Game; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Havok. Technology for Games. Available online: https://www.havok.com/ (accessed on 11 January 2019).
- Bullet. Real-Time Physics Simulation. Available online: https://pybullet.org/wordpress/ (accessed on 7 January 2019).
- Nvidia. A Multi-Platform Physics Solution. Available online: https://developer.nvidia.com/physx-sdk (accessed on 6 January 2019).
- Erez, T.; Tassa, Y.; Todorov, E. Simulation tools for model-based robotics: Comparison of Bullet, Havok, MuJoCo, ODE and PhysX. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 25–30 May 2015; pp. 4397–4404. [Google Scholar]
- Xu, Z.; Lu, X.; Guan, H.; Ren, A. Physics engine-driven visualization of deactivated elements and its application in bridge collapse simulation. Autom. Constr. 2013, 35, 471–481. [Google Scholar] [CrossRef]
- Unity. The World’s Leading Real-Time Creation Platform. Available online: https://unity.com/ (accessed on 5 January 2019).
- Tsay, R.J. A study of BIM combined with ETABS in reinforced concrete structure analysis. IOP Conf. Ser. Earth Environ. Sci. 2019, 233, 022024. [Google Scholar] [CrossRef]
- Autodesk. Robot Structural Analysis Professional. Available online: https://www.autodesk.com/products/robot-structural-analysis/overview (accessed on 2 February 2019).
- YJK. Interface between YJK and Revit. Available online: http://www.yjk.cn/cms/item/view?table=prolist&id=16 (accessed on 8 January 2019).
- Liu, Z.-Q.; Zhang, F.; Zhang, J. The building information modeling and its use for data transformation in the structural design stage. J. Appl. Sci. Eng. 2016, 19, 273–284. [Google Scholar]
- Xu, Z.; Zhang, Z.; Lu, X.; Zeng, X.; Guan, H. Post-earthquake fire simulation considering overall seismic damage of sprinkler systems based on BIM and FEMA P-58. Autom. Constr. 2018, 90, 9–22. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, H.; Lu, X.; Xu, Y.; Zhang, Z.; Li, Y. A prediction method of building seismic loss based on BIM and FEMA P-58. Autom. Constr. 2019, 102, 245–257. [Google Scholar] [CrossRef]
- Motosaka, M.; Mitsuji, K. Building damage during the 2011 off the Pacific coast of Tohoku Earthquake. Soils Found. 2012, 52, 929–944. [Google Scholar] [CrossRef]
- Badillo-Almaraz, H.; Whittaker, A.S.; Reinhorn, A.M. Seismic fragility of suspended ceiling systems. Earthq. Spectra 2007, 23, 21–40. [Google Scholar] [CrossRef]
- ToolBox Engineering. Friction and Friction Coefficients. Available online: https://www.engineeringtoolbox.com/friction-coefficients-d_778.html (accessed on 6 January 2019).
- Takuya, N. Seismic damage reconstruction of non-structural components in high building: Full-scale experiment in E-Defense shaking table (rewarded by Architectural Institute of Japan). J. Archit. Build. Sci. 2010, 83, 1607. (In Japanese) [Google Scholar]
- Ministry of Housing and Urban-Rural Development. Code for Seismic Design of Building (GB 50011-2010); China Architecture Industry Press: Beijing, China, 2016. (In Chinese) [Google Scholar]
- Kelly, J.W.; Klesel, B.C.; Cherep, L.A. Visual stabilization of balance in virtual reality using the HTC Vive. ACM Trans. Appl. Percept. 2019, 16, 8. [Google Scholar] [CrossRef]
- Egger, J.; Gall, M.; Wallner, J.; Boechat, P.; Hann, A.; Li, X.; Chen, X.; Schmalstieg, D. HTC Vive MeVisLab integration via OpenVR for medical applications. PLoS ONE 2017, 12, e0173972. [Google Scholar] [CrossRef] [PubMed]


















| Component | Typical PG ID | The Required EDP | DS | Fragility Curves |
|---|---|---|---|---|
| Suspended ceiling | C3032.001a | PFA | DS1: 5% of ceiling grid and tile damage DS2: 30% of ceiling grid and tile damage DS3: 50% of ceiling grid and tile damage | Figure 2 |
| Movable furniture | E2022.001 | PFA | DS1: Wall units need to be adjusted and straightened. Some elements are bent/damaged and need to be replaced. | Reference [22] |
| Furniture | Mass (kg) | Friction Coefficients |
|---|---|---|
| The lower cabinet (Left) | 109.82 | 0.62 |
| The lower cabinet (Right) | 159.19 | 0.62 |
| The taller wardrobe | 135.96 | 0.62 |
| Lamp | 2.70 | 0.50 |
| Story | Peak Floor Velocity (mm/s) | PFA (g) |
|---|---|---|
| 1 | 127.749 | 0.232 |
| 2 | 350.015 | 0.541 |
| 3 | 542.816 | 0.714 |
| 4 | 688.488 | 0.829 |
| 5 | 862.150 | 0.873 |
| 6 | 997.742 | 1.191 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Zhang, H.; Wei, W.; Yang, Z. Virtual Scene Construction for Seismic Damage of Building Ceilings and Furniture. Appl. Sci. 2019, 9, 3465. https://doi.org/10.3390/app9173465
Xu Z, Zhang H, Wei W, Yang Z. Virtual Scene Construction for Seismic Damage of Building Ceilings and Furniture. Applied Sciences. 2019; 9(17):3465. https://doi.org/10.3390/app9173465
Chicago/Turabian StyleXu, Zhen, Huazhen Zhang, Wei Wei, and Zhebiao Yang. 2019. "Virtual Scene Construction for Seismic Damage of Building Ceilings and Furniture" Applied Sciences 9, no. 17: 3465. https://doi.org/10.3390/app9173465
APA StyleXu, Z., Zhang, H., Wei, W., & Yang, Z. (2019). Virtual Scene Construction for Seismic Damage of Building Ceilings and Furniture. Applied Sciences, 9(17), 3465. https://doi.org/10.3390/app9173465