Development of Image Processing for Crack Detection on Concrete Structures through Terrestrial Laser Scanning Associated with the Octree Structure




Abstract
Featured Application
Abstract
1. Introduction
1.1. Background and Purpose of the Study
1.2. Scope and Method of Research
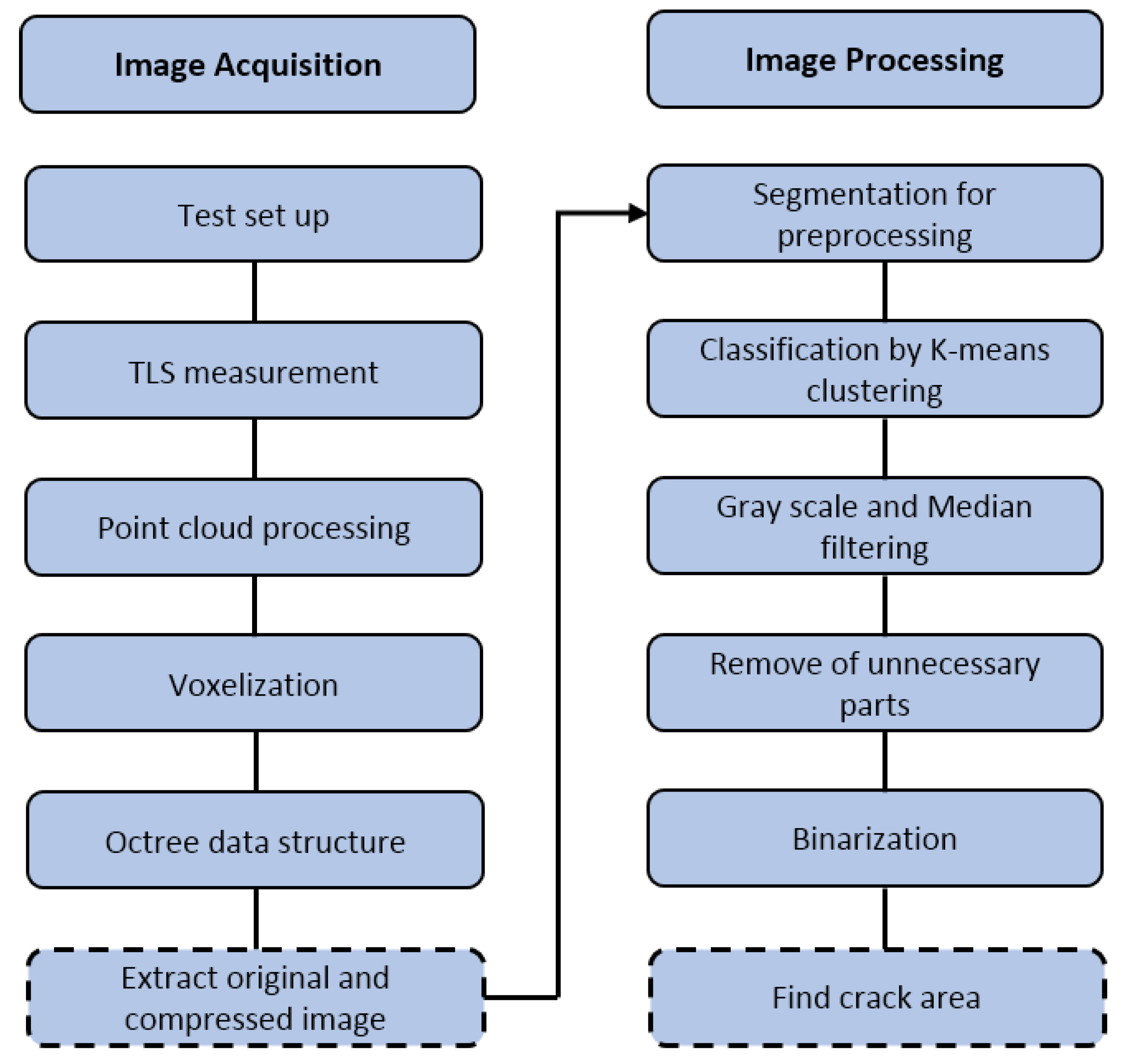
2. TLS Measurement and Data Compression
2.1. 3D Laser Scanning
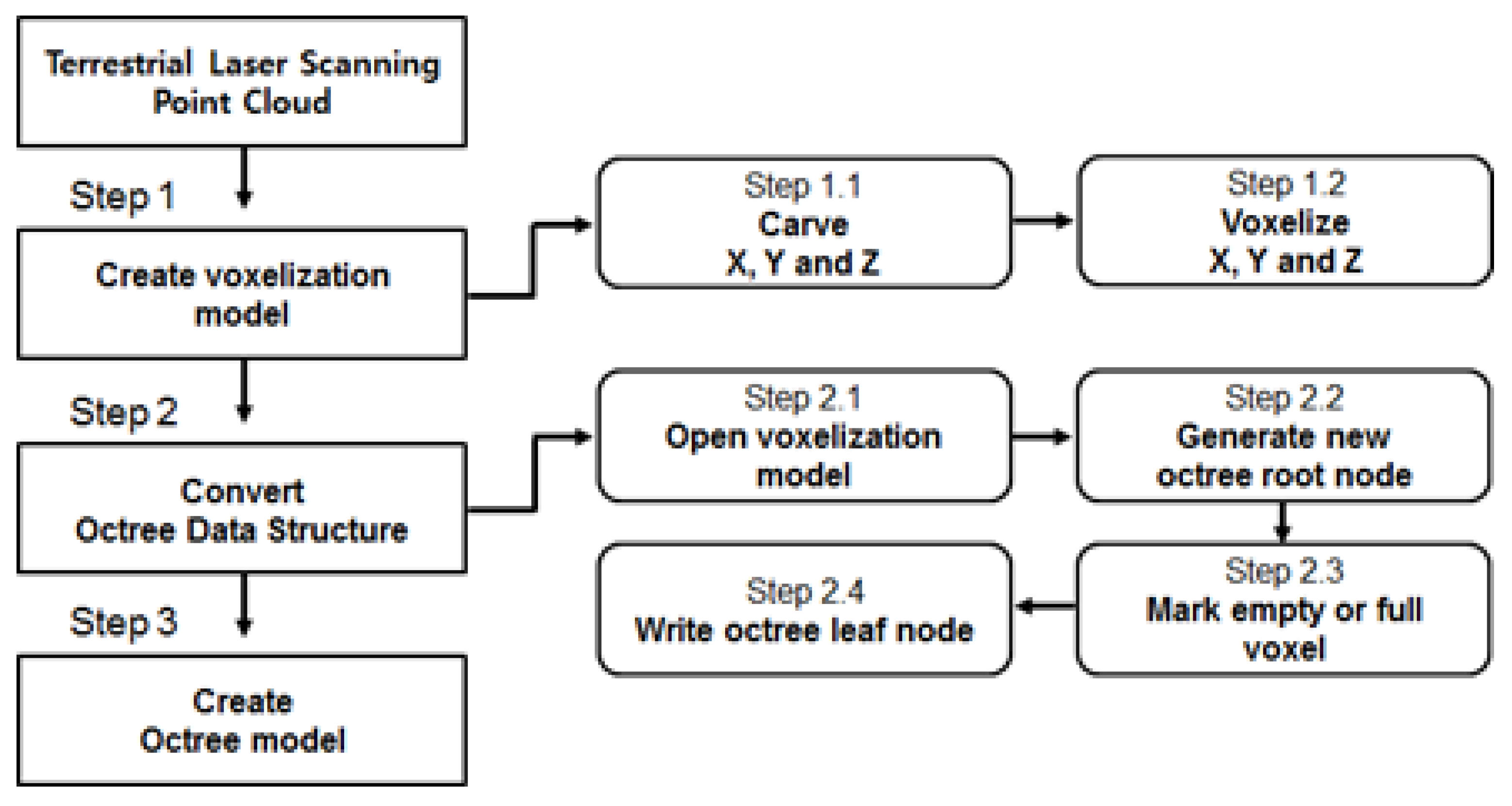
2.2. Voxelization and Octree Data Structure
3. Image Processing
3.1. K-Means Clustering
3.2. Conversion into the Gray-Scale Image
3.3. Median Filtering and Improved Subtraction
3.4. Removal of Unnecessary Parts Using K-Means Clustering
3.5. Binarization
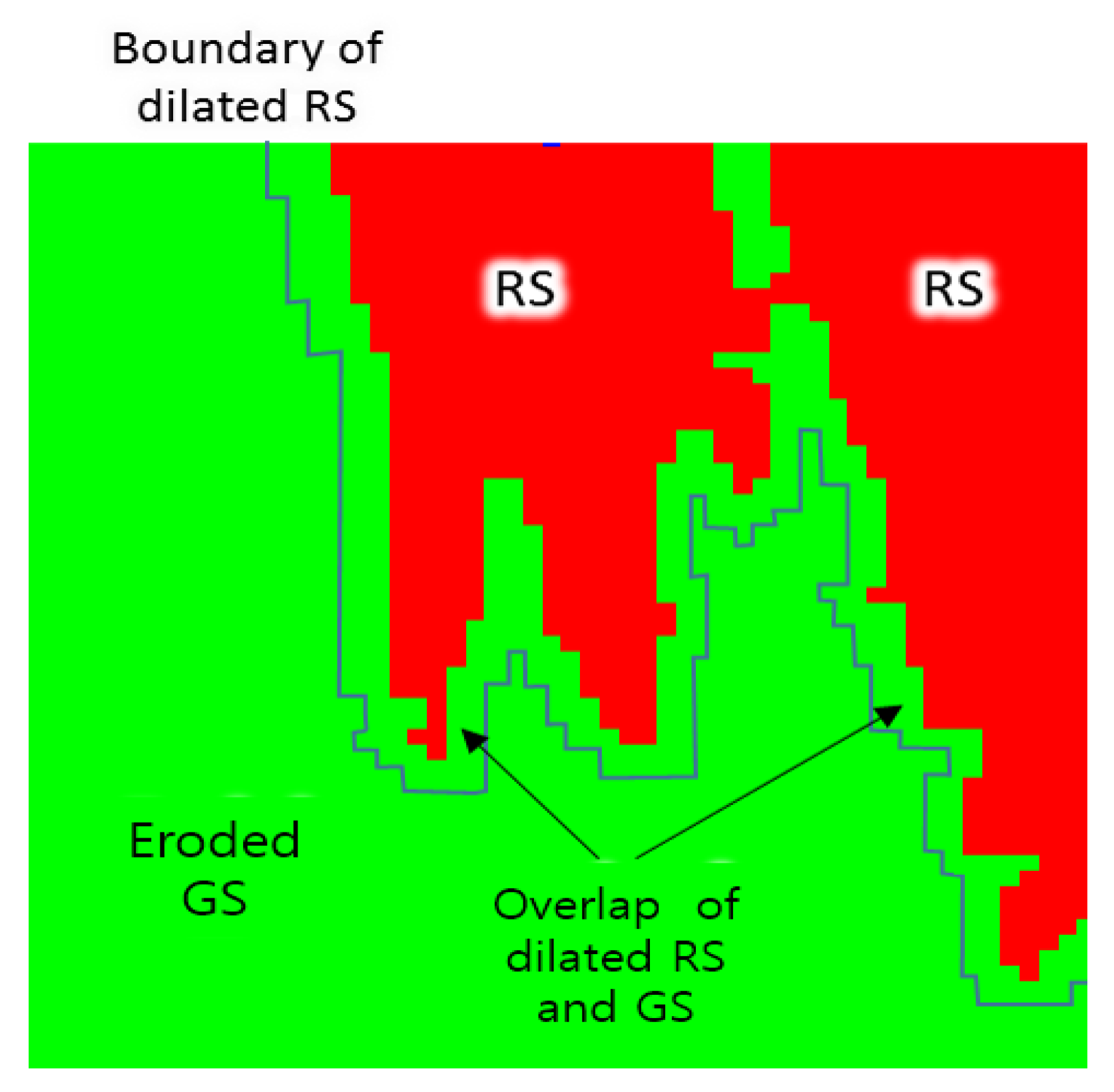
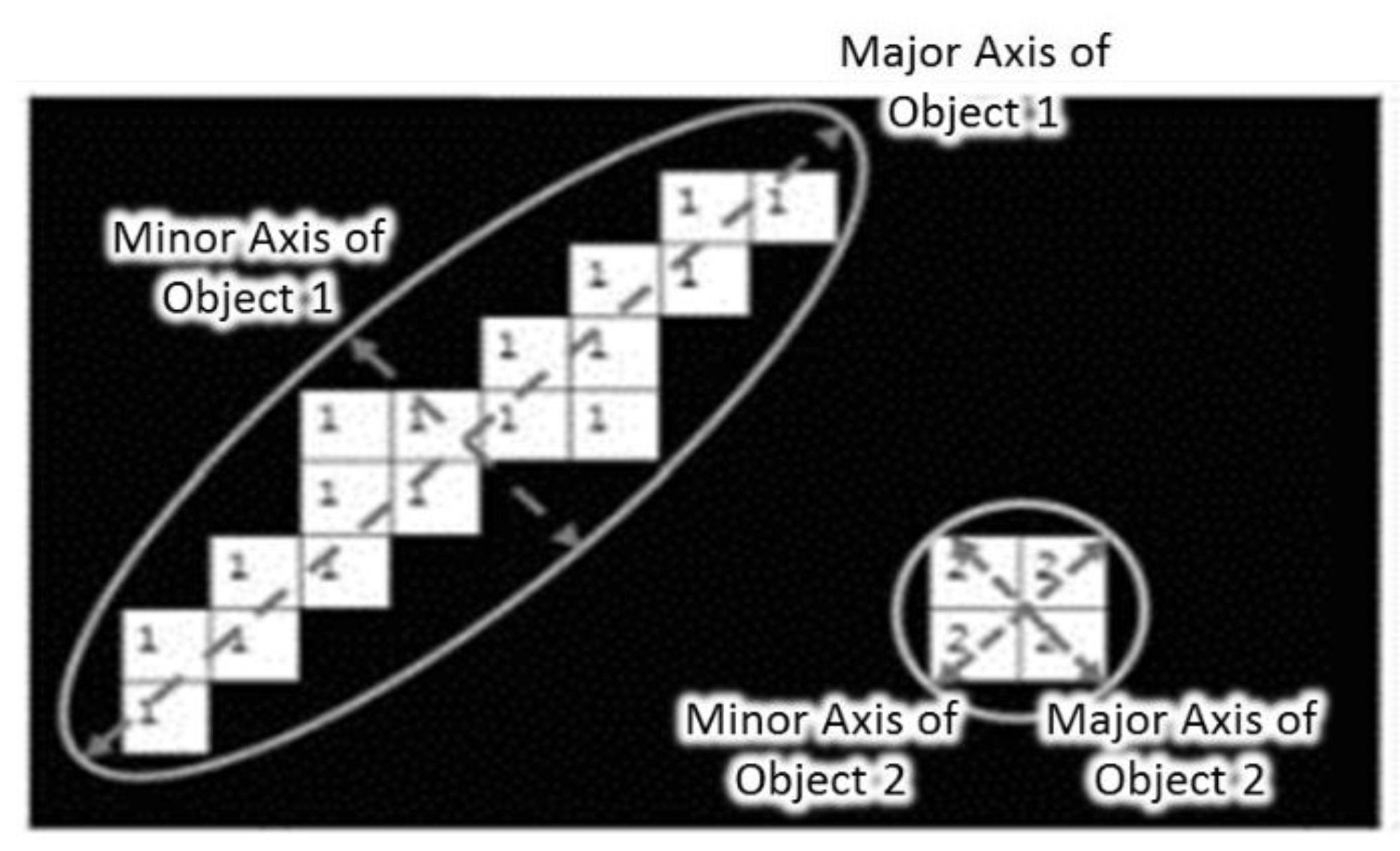
3.6. Morphological Operation: Closing and Blob Removal
4. Construction of Octree-Based Shape Information Model
4.1. Test-Bed and Equipment
4.2. Construction and Visualization of an Octree-Based Shape Information Model
4.3. Image Processing for Crack Detection
- Convert RGB image to grayscale.
- Use the Sobel edge detector to find the edges with masks and get the value of the edge image.
- Use Otsu’s thresholding value to obtain the binary image.
- Find the connected areas in the binary image with the controlled area and put them to the background.
5. Conclusions
- (1)
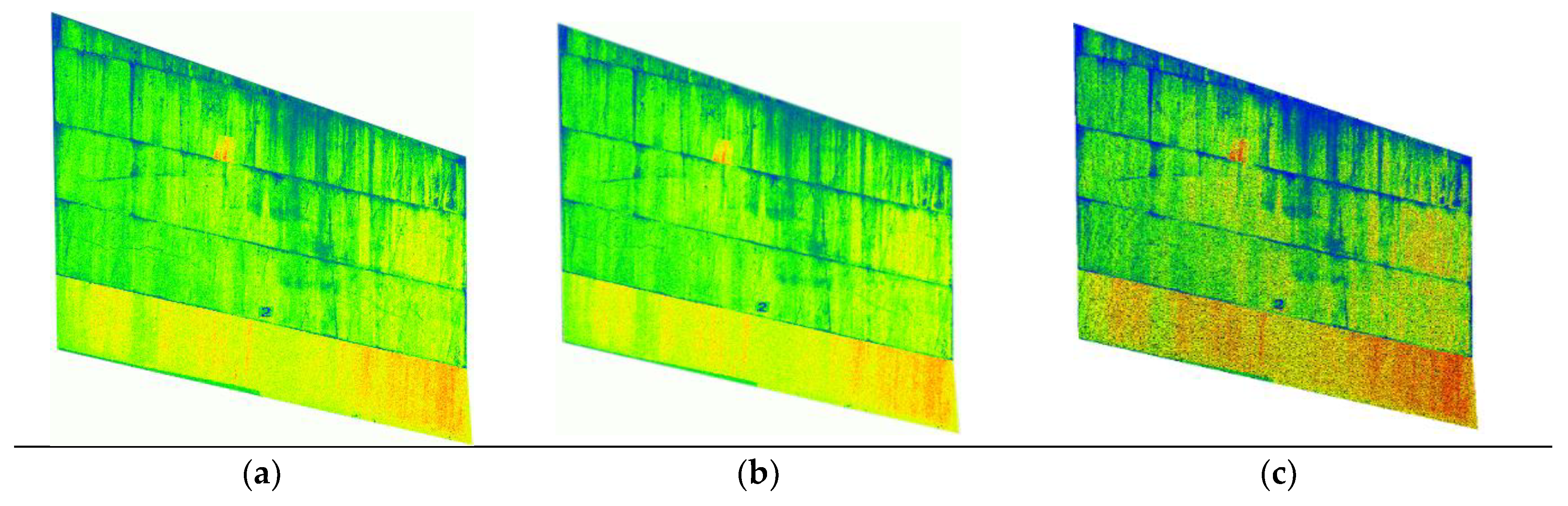
- The original scan data 19.56 MB was compressed using the octree data structure up to the 31.6%, 50.3%, and 80.2% corresponding to the data size of 13.36 MB, 9.7 MB, and 3.86 MB, respectively.
- (2)
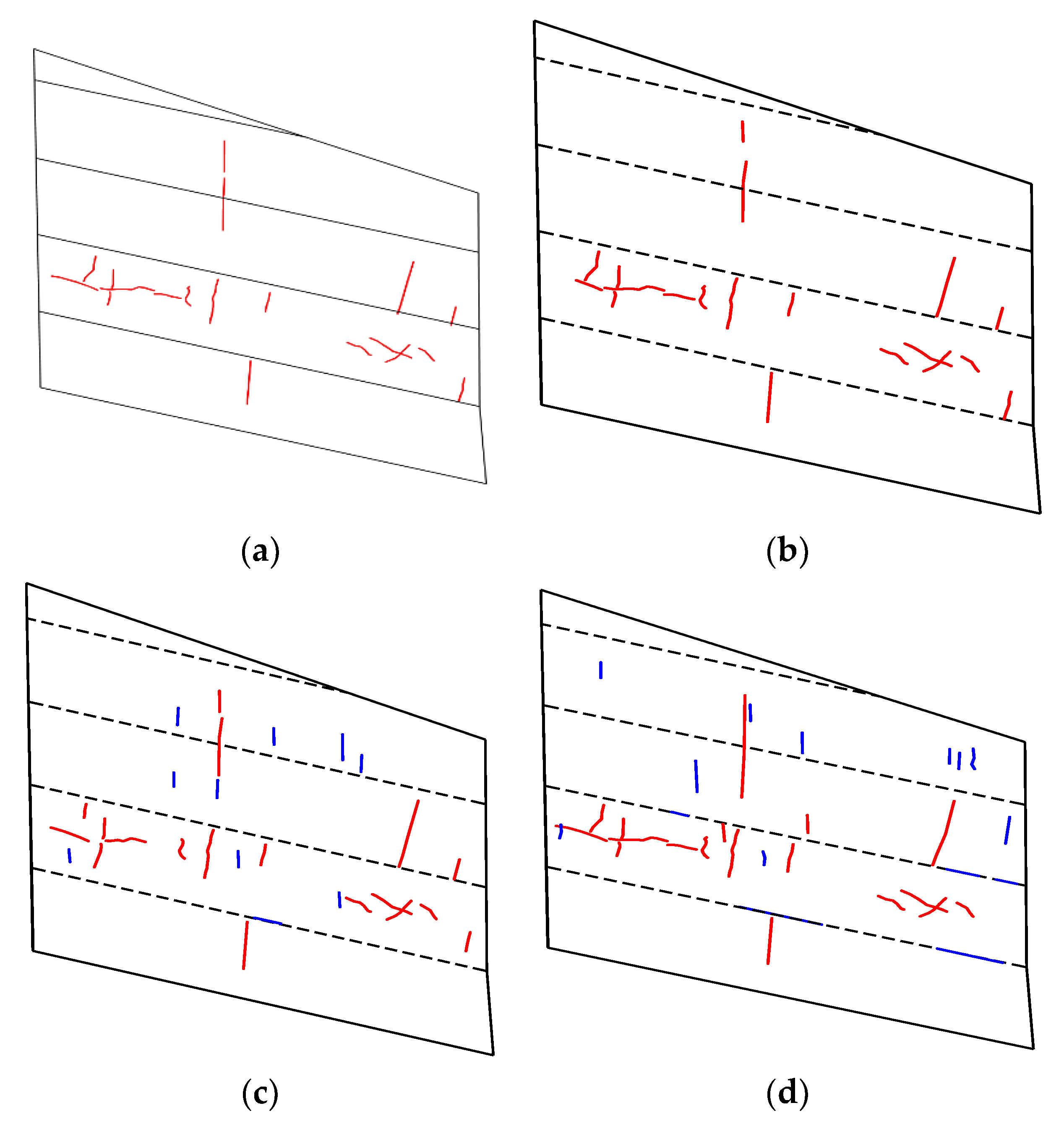
- Most major cracks as well as some minor cracks due to drying shrinkage of concrete could be identified successfully even in the 50% compressed image of the proposed method.
- (3)
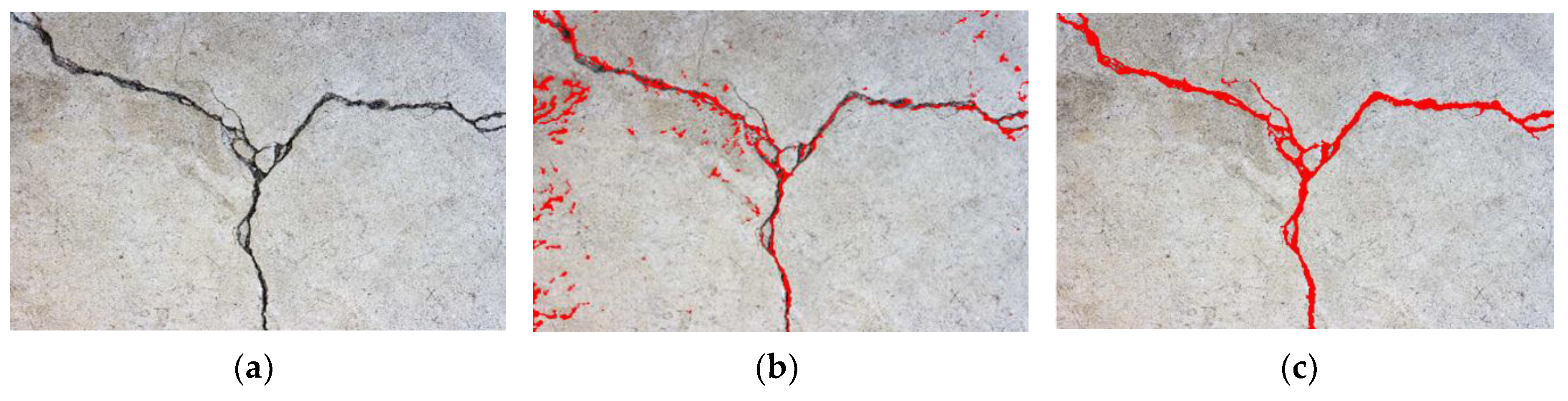
- The identified cracks by the proposed method had good agreement with the cracks obtained by visual inspection.
- (4)
- The proposed method could minimize the false recognition of cracks on the structural joints and sediments with the help of K-means clustering, compared to Talab’s method.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Olsen, M.J.; Kuester, F.; Chang, B.J.; Hutchinson, T.C. Terrestrial laser scanning-based structural damage assessment. J. Comput. Civ. Eng. 2009, 24, 264–272. [Google Scholar] [CrossRef]
- Anil, E.B.; Akinci, B.; Garrett, J.H.; Kurc, O. Characterization of laser scanners for detecting cracks for post-earthquake damage inspection. In Proceedings of the International Symposium on Automation and Robotics in Construction and Mining (ISARC), Montreal, QC, Canada, 11–15 August 2013. [Google Scholar]
- Giri, P.; Kharkovsky, S. Detection of surface crack in concrete using measurement technique with laser displacement sensor. IEEE Trans. Instrum. Meas. 2016, 65, 1951–1953. [Google Scholar] [CrossRef]
- Laefer, D.F.; Truong-Hong, L.; Carr, H.; Singh, M. Crack detection limits in unit based masonry with terrestrial laser scanning. NDT & E Int. 2014, 62, 66–76. [Google Scholar]
- Li, T.; Almond, D.P.; Rees, D.A.S. Crack imaging by scanning pulsed laser spot thermography. NDT & E Int. 2011, 44, 216–225. [Google Scholar]
- Kim, M.K.; Sohn, H.; Chang, C.C. Localization and quantification of concrete spalling defects using terrestrial laser scanning. J. Comput. Civ. Eng. 2014, 29, 04014086. [Google Scholar] [CrossRef]
- Valença, J.; Puente, I.; Júlio, E.; González-Jorge, H.; Arias-Sánchez, P. Assessment of cracks on concrete bridges using image processing supported by laser scanning survey. Constr. Build. Mater. 2017, 146, 668–678. [Google Scholar] [CrossRef]
- Xu, X.; Yang, H.; Neumann, I. Concrete crack measurement and analysis based on terrestrial laser scanning technology. Sens. Transducers 2015, 186, 168–172. [Google Scholar]
- Tsakiri, M.; Lichti, D.; Pfeifer, N. Terrestrial Laser Scanning for Deformation Monitoring. In Proceedings of the 3rd IAG/12th FIG Symposium, Baden, Austria, 22–24 May 2006; pp. 22–24. [Google Scholar]
- Van Gosliga, R.; Lindenbergh, R.; Pfeifer, N. Deformation analysis of a bored tunnel by means of terrestrial laser scanning. In Proceedings of the International Archives of the Photogrammetry, Dresden, Germany, 25–27 September 2006; pp. 25–27. [Google Scholar]
- Chang, Y.; LAI, S.; Peng, S.; Chang, K. Non-Contact Bridge Deflection Measurement: Application of Laser Technology. In Proceedings of the Integrating Generations FIG Working Week, Stockholm, Sweden, 14–19 June 2008; pp. 14–19. [Google Scholar]
- Koch, K. Three-dimensional NURBS surface estimated by lofting method. J. Adv. Manuf. Technol. 2010, 49, 1059–1068. [Google Scholar] [CrossRef]
- Jafari, B.; Khaloo, A.; Lattanzi, D. Deformation tracking in 3D point clouds via statistical sampling of direct cloud-to-cloud distances. J. Nondestruct. Eval. 2017, 36, 65. [Google Scholar] [CrossRef]
- Khaloo, A.; Lattanzi, D. Automatic Detection of Structural Deficiencies Using 4D Hue-Assisted Analysis of Color Point Clouds. Conf. Proc. Soc. Exp. Mech. 2019, 2, 197–205. [Google Scholar]
- Dai, K.; Li, A.; Zhang, H.; Chen, S.E.; Pan, Y. Surface damage quantification of the post-earthquake building based on terrestrial laser scan data. Struct. Control Health 2018, 25, e2210. [Google Scholar] [CrossRef]
- Dawood, T.; Zhu, Z.; Zayed, T. Computer vision–based model for moisture marks detection and recognition in subway networks. J. Comput. Civ. Eng. 2017, 32, 04017079. [Google Scholar] [CrossRef]
- Law, D.W.; Silcock, D.; Holden, L. Terrestrial laser scanner assessment of deteriorating concrete structures. Struct. Control Health 2018, 25, e2156. [Google Scholar] [CrossRef]
- Song, M.; Yousefianmoghadam, S.; Mohammadi, M.E.; Moaveni, B.; Stavridis, A.; Wood, R.L. An application of finite element model updating for damage assessment of a two-story reinforced concrete building and comparison with lidar. Struct. Health Monit. 2018, 17, 1129–1150. [Google Scholar] [CrossRef]
- Lõhmus, H.; Ellmann, A.; Märdla, S.; Idnurm, S. Terrestrial laser scanning for the monitoring of bridge load tests–two case studies. Surv. Rev. 2018, 50, 270–284. [Google Scholar] [CrossRef]
- Baeza, F.J.; Ivorra, S.; Bru, D.; Varona, F.B. Structural health monitoring systems for smart heritage and infrastructures in Spain. In Mechatronics for Cultural Heritage and Civil Engineering; Springer: New York, NY, USA, 2018; pp. 271–294. [Google Scholar]
- Laefer, D.F.; Gannon, J.; Deely, E. Reliability of crack detection methods for baseline condition assessments. J. Infrastruct. Syst. 2010, 16, 129–137. [Google Scholar] [CrossRef]
- Koch, C.; Georgieva, K.; Kasireddy, V.; Akinci, B.; Fieguth, P. A review on computer vision based defect detection and condition assessment of concrete and asphalt civil infrastructure. Adv. Eng. Inform. 2015, 29, 196–210. [Google Scholar] [CrossRef]
- Chae, M.; Abraham, D. Neuro-fuzzy approaches for sanitary sewer pipeline condition assessment. J. Comput. Civ. Eng. 2001, 15, 4. [Google Scholar] [CrossRef]
- Khanfar, A.; Abu-Khousa, M.; Qaddoumi, N. Microwave near-field nondestructive detection and characterization of disbonds in concrete structures using fuzzy logic techniques. Compos. Struct. 2003, 62, 335–339. [Google Scholar] [CrossRef]
- Adbel-Qader, I.; Abudayyeh, O.; Kelly, M. Analysis of edge-detection techniques for crack identification in bridges. J. Comput. Civ. Eng. 2003, 17, 255. [Google Scholar] [CrossRef]
- Guo, W.; Soibelman, L.; Garrett, J., Jr. Automated defect detection for sewer pipeline inspection and condition assessment. Autom. Constr. 2009, 18, 587–596. [Google Scholar] [CrossRef]
- Ng, H. Automatic thresholding for defect detection. Pattern Recogn. Lett. 2006, 27, 1644–1649. [Google Scholar] [CrossRef]
- Sinha, S.; Fieguth, P. Neuro-fuzzy network for the classification of buried pipe defects. Autom. Constr. 2006, 15, 73–83. [Google Scholar] [CrossRef]
- Moon, H.; Kim, J. Intelligent crack detecting algorithm on the concrete crack image using neural network. In Proceedings of the 28th ISARC, Seoul, Korea, 29 June–2 July 2011; pp. 1461–1467. [Google Scholar]
- Kawamura, K.; Miyamoto, A.; Nakamura, H.; Sato, R. Proposal of a crack pattern extraction method from digital images using an interactive genetic algorithm. JSCE 2003, 742, 115–131. [Google Scholar]
- Goswami, P.; Zhang, Y.; Pajarola, R.; Gobbetti, E. High Quality Interactive Rendering of Massive Point Models using Multi-way kd-Trees. In Proceedings of the 18th Pacific Conference on Computer Graphics and Applications 2010, Hangzhou, China, 25–27 September 2010; pp. 93–100. [Google Scholar]
- Saxena, M.; Finnigan, P.M.; Graichen, C.M.; Hathaway, A.F.; Parthasarathy, V.N. Octree-based automatic mesh generation for non-manifold domains. Eng. Comput. 1995, 11, 1–14. [Google Scholar] [CrossRef]
- Woo, H.; Kang, E.; Wang, S.; Lee, K.H. A new segmentation method for point cloud data. Int. J. Mach Tools Manuf. 2002, 42, 167–178. [Google Scholar] [CrossRef]
- Wang, M.; Tseng, Y.H. Lidar data segmentation and classification based on octree structure. In Proceedings of the XXth ISPRS Congress, Istanbul, Turkey, 12–23 July 2004. [Google Scholar]
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. Comput. Gr. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Cho, H.; Cho, W.; Park, J.; Song, N. 3D building modeling using aerial LiDAR data. Korean J. Remote Sens. 2008, 24, 141–152. [Google Scholar]
- Marechal, L. Advances in octree-based all hexahedral mesh generation: Handling sharp features. In Proceedings of the 18th International Meshing Roundtable, Salt Lake City, UT, USA, 25–28 October 2009; pp. 65–84. [Google Scholar]
- Han, S.; Lee, S.; Kim, S.P.; Kim, C.; Heo, J.; Lee, H.A. Comparison of 3D R-tree and octree to index large point clouds from a 3D terrestrial laser scanner. Korean J. Geomat. 2011, 29, 531–537. [Google Scholar] [CrossRef]
- Wang, J.; Lindenbergh, R.; Menenti, M. SigVox—A 3D feature matching algorithm for automatic street object recognition in mobile laser scanning point clouds. ISPRS J Photogramm. 2017, 128, 111–129. [Google Scholar] [CrossRef]
- Richard, O.D.; Peter, E.H. Pattern Classification and Scene Analysis; John Wiley and Sons: New York, NY, USA, 1973. [Google Scholar]
- Fujita, Y.; Hamamoto, Y. A robust automatic crack detection method from noisy concrete surfaces. Mach. Vis. Appl. 2010, 22, 1–10. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE. Trans. Syst. Man Cybern. C 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Fukuchi, T.; Shiina, T. Industrial Applications of Laser Remote Sensing; Bentham Science Publishers: Oak Par, IL, USA, 2012. [Google Scholar]
- Hocken, R.J.; Pereira, P.H. Coordinate Measuring Machines and Systems; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A Voxel-Based Method for Automated Identification and Morphological Parameters Estimation of Individual Street Trees from Mobile Laser Scanning Data. Remote. Sens 2013, 5, 584–611. [Google Scholar] [CrossRef]
- Kim, Y.J.; Kim, J.J. Compression of Normal Vectors using Octree Encoding. Soc. CAD/CAM Eng. 2007, 12, 109–117. [Google Scholar]
- Ryu, J.H. Efficient Octree Encoding for Real Time Transmission of 3D Geometry Data Through Internet. Soc. CAD/CAM Eng. 2002, 7, 262–268. [Google Scholar]
- Tamminen, M. Efficient Octree Conversion by Connectivity Labeling. In Proceedings of the 11th Annual Conference on Computer Graphics and Interactive Techniques, Minneapolis, MN, USA, 23–27 July 1984. [Google Scholar]
- Weiss, N.A. A Course in Probability; Addison–Wesley: Singapore, 2005; pp. 385–386. [Google Scholar]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robots 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Ahmed, M.T.; Huanga, Z.; Fan, X.; Liu, H.M. Detection crack in image using Otsu method and multiple filtering in image processing techniques. Optik 2015, 127, 1–4. [Google Scholar] [CrossRef]
- Liu, C.; Tang, C.S.; Shi, B.; Suo, W.B. Automatic quantification of crack patterns by image processing. Comput. Geosci. 2013, 57, 77–80. [Google Scholar] [CrossRef]
- Adhikari, R.S.; Moselhi, O.; Bagchi, A. Image-based retrieval of concrete crack properties for bridge inspection. Autom. Constr. 2014, 39, 180–194. [Google Scholar] [CrossRef]
- Liu, Y.; Cho, S.; Spencer, B.F., Jr.; Fan, J. Automated assessment of cracks on concrete surfaces using adaptive digital image processing. Smart Struct. Syst. 2014, 14, 719–741. [Google Scholar] [CrossRef]
- Liu, Y.F.; Cho, S.; Spencer, B.F., Jr.; Fan, J.S. Concrete crack assessment using digital image processing and 3D scene reconstruction. J. Comput. Civ. Eng. 2014, 30, 04014124. [Google Scholar] [CrossRef]
- Korea Ministry of Land, Infrastructure, and Transport (MLIT) and Korea. Guideline for Regular and Detailed Inspection; Korea Infrastructure Safety and Technology Corporation (KISTeC): Jinju, Korea, 2017; pp. 6–23. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | Operation |
|---|---|
| 1 | K-means Clustering: Divide original image into three images according to color similarity |
| 2 | Convert original image into gray-level image |
| 3 | Subtract median-filtered image from original gray-scale image to remove background |
| 4 | Remove image parts according to structural joints, sediments, etc. using segment information obtained by k-means clustering |
| 5 | Binarization using Otsu’s method (threshold = 0.2 × Ostu’s threshold) |
| 6 | Morphological closing to connect slightly-separated pixels |
| 7 | Remove blobs (i.e., pixel groups) with the controlled area and eccentricity |
| No. | Width (mm) | Length (mm) | No. | Width (mm) | Length (mm) |
|---|---|---|---|---|---|
| 1 | 0.2 | 1070 | 11 | 0.1 | 770 |
| 2 | 0.2 | 1810 | 12 | 0.1 | 1560 |
| 3 | 0.2 | 1840 | 13 | 0.1 | 670 |
| 4 | 0.2 | 650 | 14 | 0.1 | 810 |
| 5 | 0.2 | 960 | 15 | 0.1 | 1330 |
| 6 | 0.2 | 1350 | 16 | 0.1 | 890 |
| 7 | 0.2 | 640 | 17 | 0.1 | 620 |
| 8 | 0.2 | 450 | 18 | 0.1 | 850 |
| 9 | 0.2 | 1480 | 19 | 0.2 | 1500 |
| 10 | 0.1 | 740 |
 | Model | Leica ScanStation C5 |
| Measurement distance | 300 m | |
| Spot size | From 0–50 m: 4.5 mm (FWHH-based), 7 mm (Gaussian-based) | |
| Range accuracy | 35 m at 300 m | |
| Precision | 2 mm | |
| Speed | 50,000 point/s | |
| Range | Horizontal 360° (max) Vertical 270° (max) | |
| Laser Class | 3R (IEC 60825-1) | |
| Memory | 80 GB |
| Scan Parameter | Setting Value | Scanning View |
|---|---|---|
| Left | −11° |  |
| Right | 11.5° | |
| Top | 90° | |
| Bottom | −45° | |
| Resolution Mode | Highest Resolution |
| Div. | Data Points | Octree Level | Point Compression (%) | Data Size (MB) |
|---|---|---|---|---|
| Original | 1,367,274 | 1 | 0 | 19.56 |
| Case1 | 934,061 | 9 | 31.6 | 13.36 |
| Case2 | 678,319 | 10 | 50.3 | 9.7 |
| Case3 | 269,942 | 11 | 80.2 | 3.86 |
| Factors | Original | Case 1 | Case 2 | |
|---|---|---|---|---|
| K-means clustering | A | 300 × 550, 600 × 100, 500 × 200 | 300 × 550, 600 × 100, 500 × 200 | 300 × 550, 600 × 100, 500 × 200 |
| Median filter size | B | 20 | 16 | 14 |
| Segmentation level | C | 23 | 17 | 15 |
| Control of area, Eccentricity | D | >100, >0.3 | >100, >0.3 | >100, >0.3 |
| No. | True Positive | False Negative | Number of False Positive |
|---|---|---|---|
| Original | 100% (19/19) | 0% (0/19) | 0 |
| Case 1 | 95% (18/19) | 5% (1/19) | 10 |
| Case 2 | 84% (16/19) | 16% (3/19) | 15 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, S.; Park, S.; Cha, G.; Oh, T. Development of Image Processing for Crack Detection on Concrete Structures through Terrestrial Laser Scanning Associated with the Octree Structure. Appl. Sci. 2018, 8, 2373. https://doi.org/10.3390/app8122373
Cho S, Park S, Cha G, Oh T. Development of Image Processing for Crack Detection on Concrete Structures through Terrestrial Laser Scanning Associated with the Octree Structure. Applied Sciences. 2018; 8(12):2373. https://doi.org/10.3390/app8122373
Chicago/Turabian StyleCho, Soojin, Seunghee Park, Gichun Cha, and Taekeun Oh. 2018. "Development of Image Processing for Crack Detection on Concrete Structures through Terrestrial Laser Scanning Associated with the Octree Structure" Applied Sciences 8, no. 12: 2373. https://doi.org/10.3390/app8122373
APA StyleCho, S., Park, S., Cha, G., & Oh, T. (2018). Development of Image Processing for Crack Detection on Concrete Structures through Terrestrial Laser Scanning Associated with the Octree Structure. Applied Sciences, 8(12), 2373. https://doi.org/10.3390/app8122373