





Pull-Out Test and Mechanical Properties Analysis Based on Intelligent Bolt and Internet of Things


Abstract
1. Introduction
2. Research and Design of Intelligent Pull-Out Test System for Rock Bolt
2.1. Design of Intelligent Pull-Out Test Scheme for Anchor Bolt
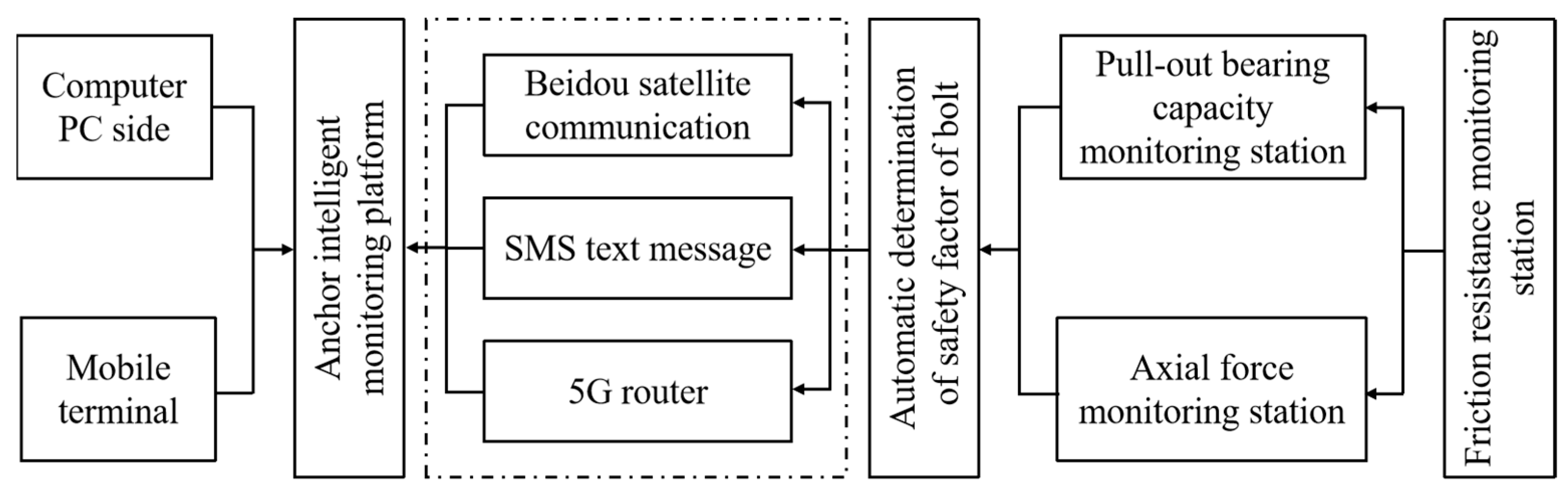
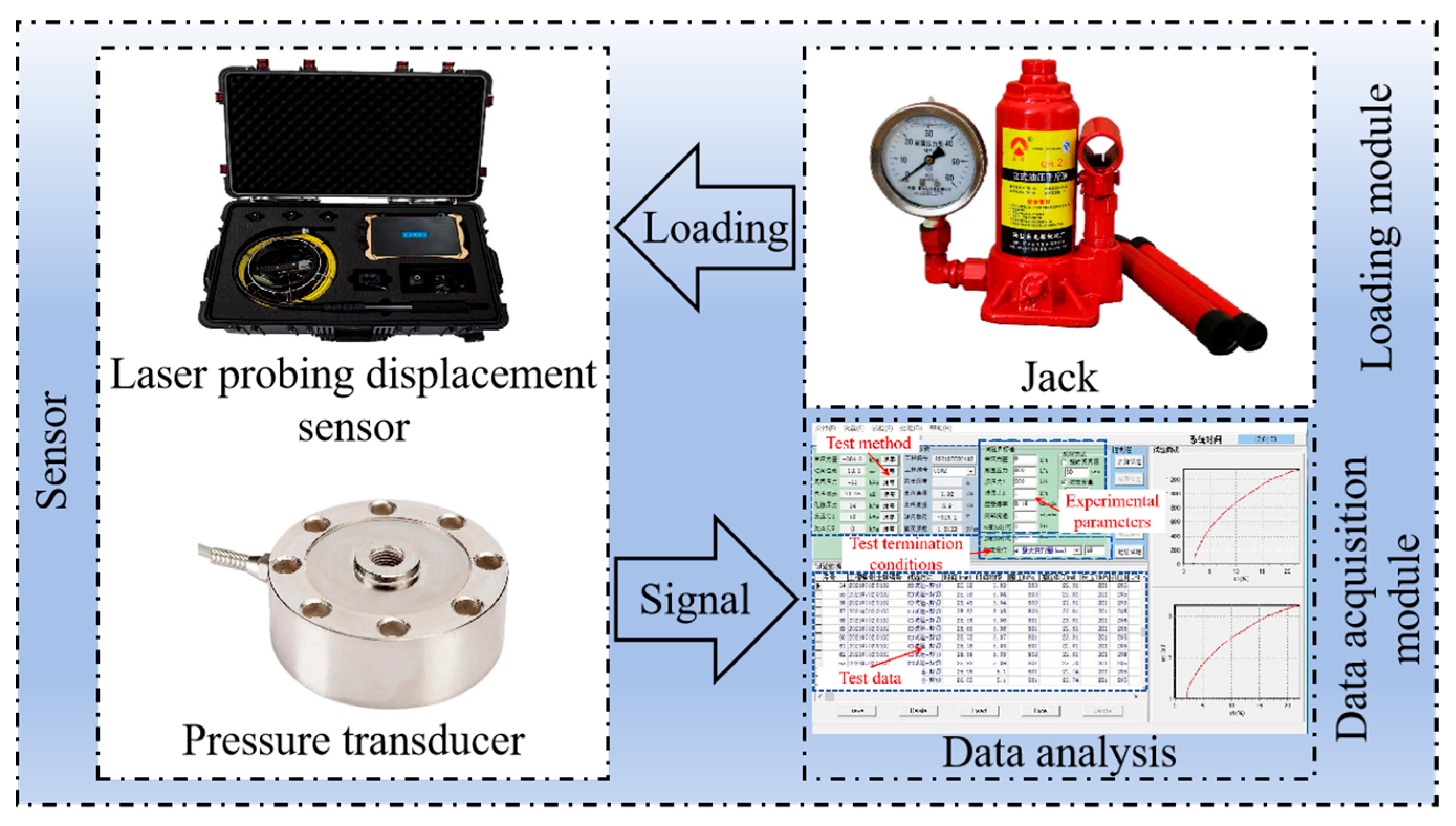
2.2. The Composition of Intelligent Pull-Out Test System for Anchor Rod Is Introduced
2.3. Dynamic Design of Intelligent Bolt Pull-Out Test
3. Field Test
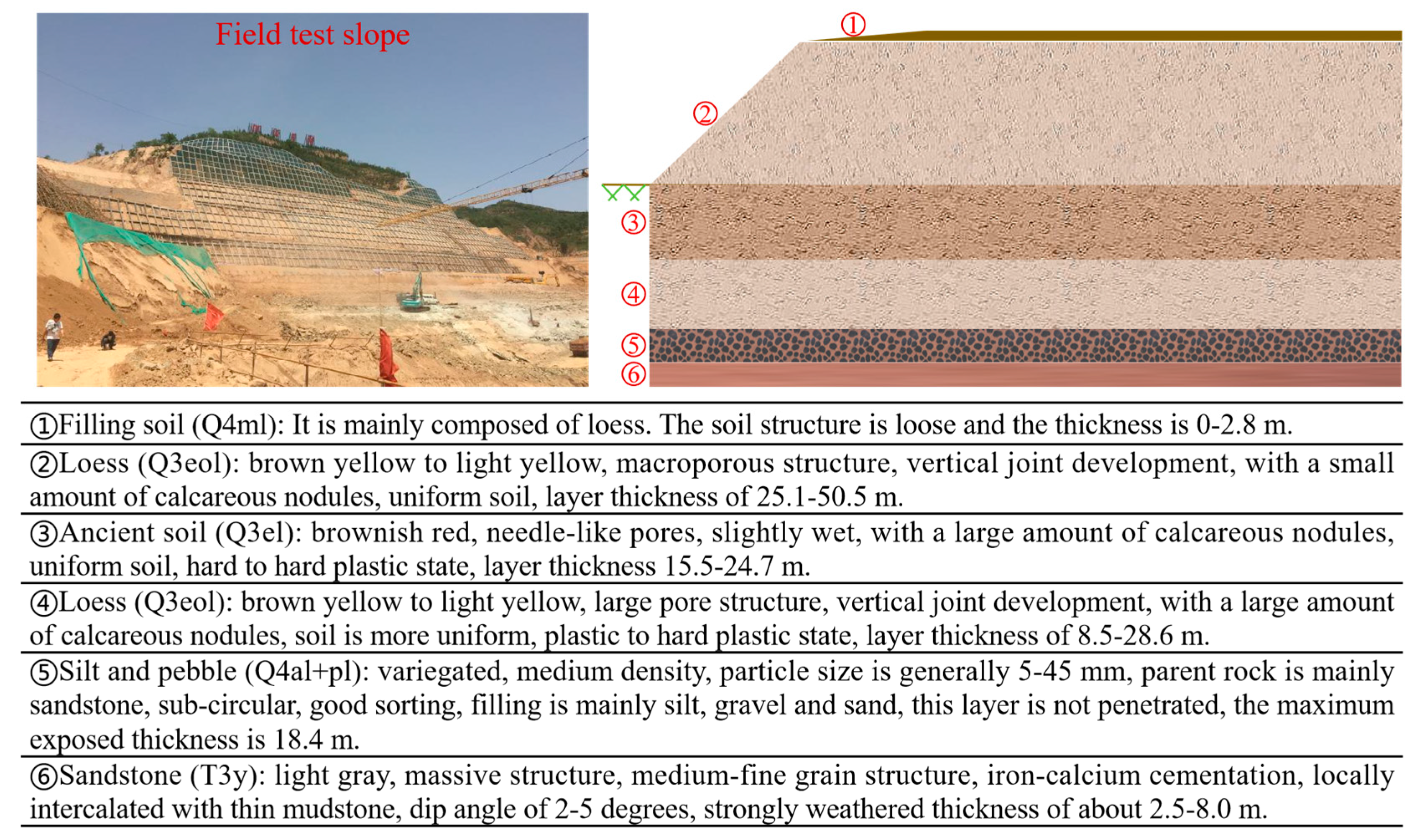
3.1. Engineering Geology
3.2. Testing Material
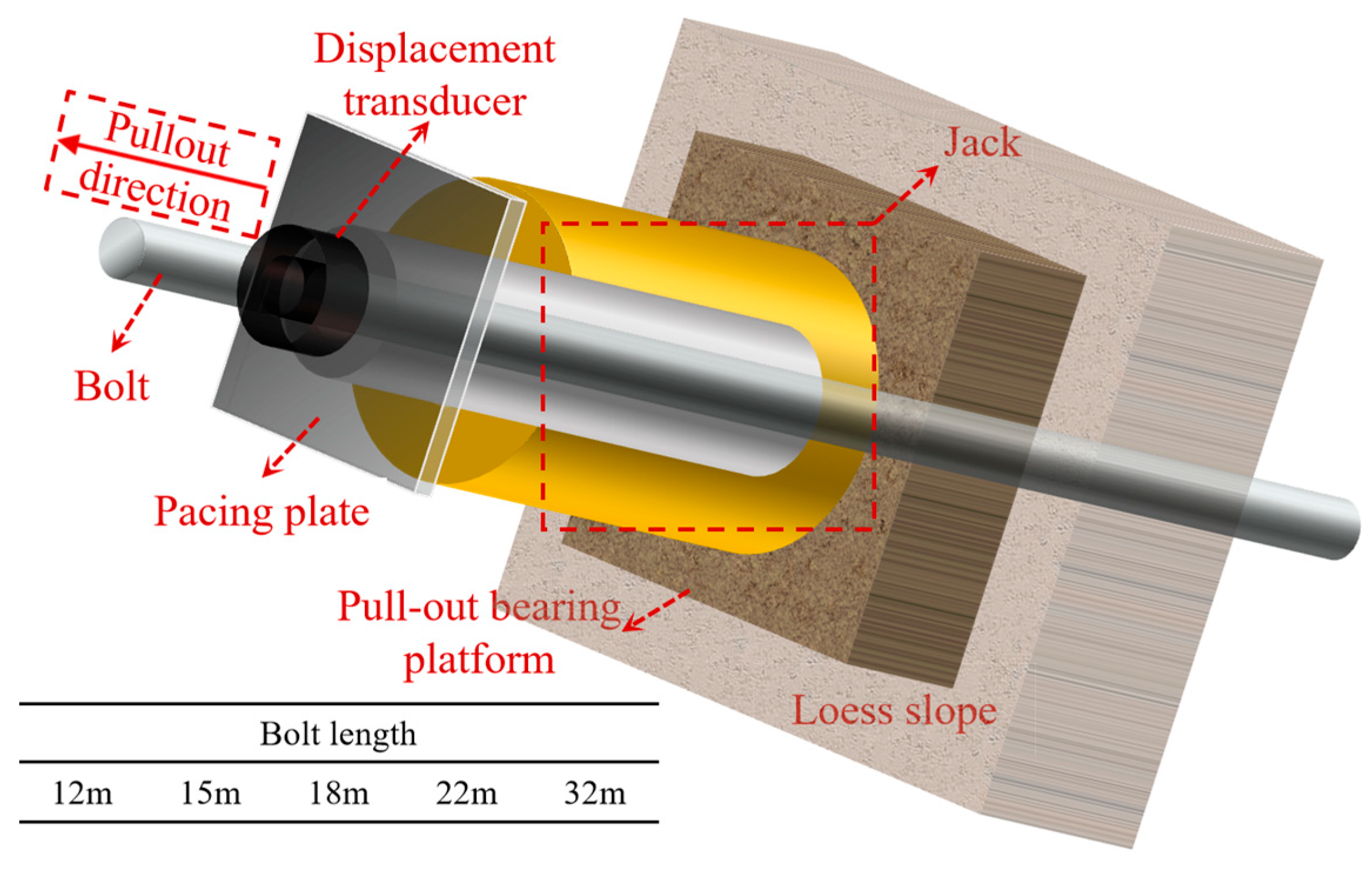
3.3. Pull-Out Test
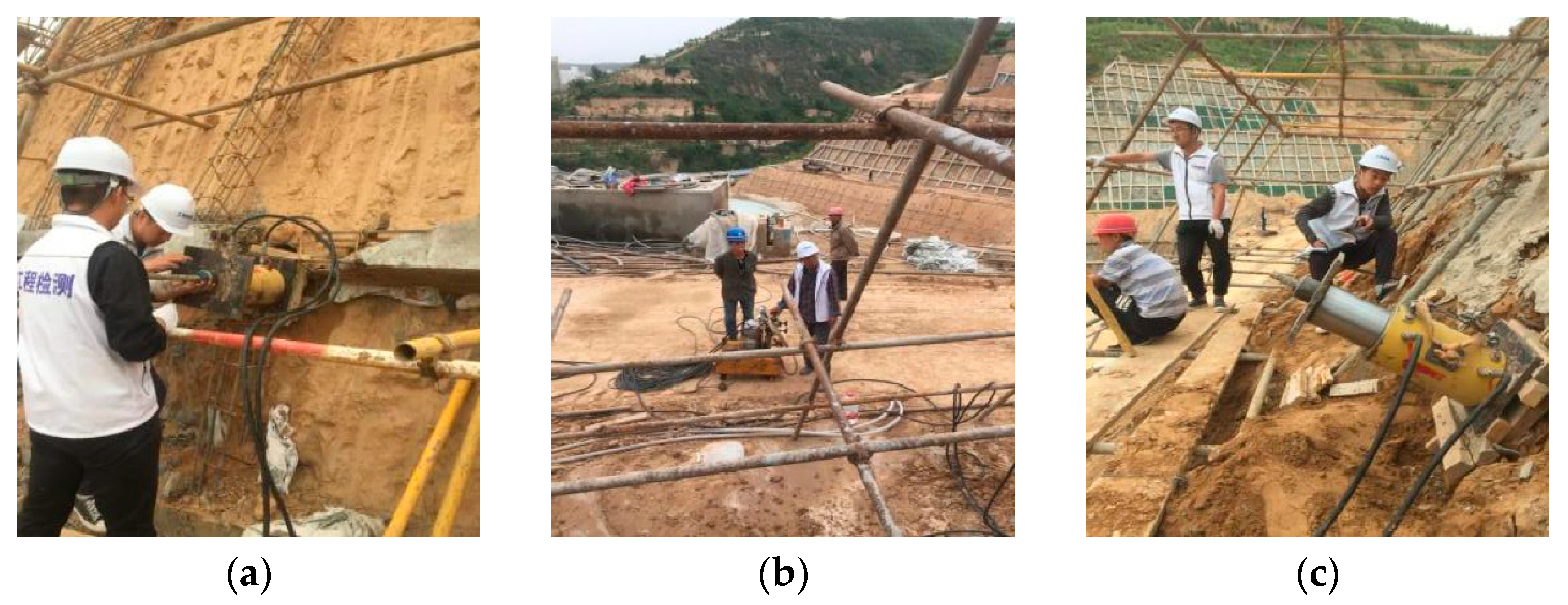
- Drilling: The drilling is performed using a crawler rotary jet drilling rig. The vertical spacing between drill holes is 2.5 m, and the horizontal spacing is 2.0 m. The diameter of each drill hole is 200 mm. The drilling direction has a horizontal inclination angle of 15°, and all drill holes are located at the same depth within the slope.
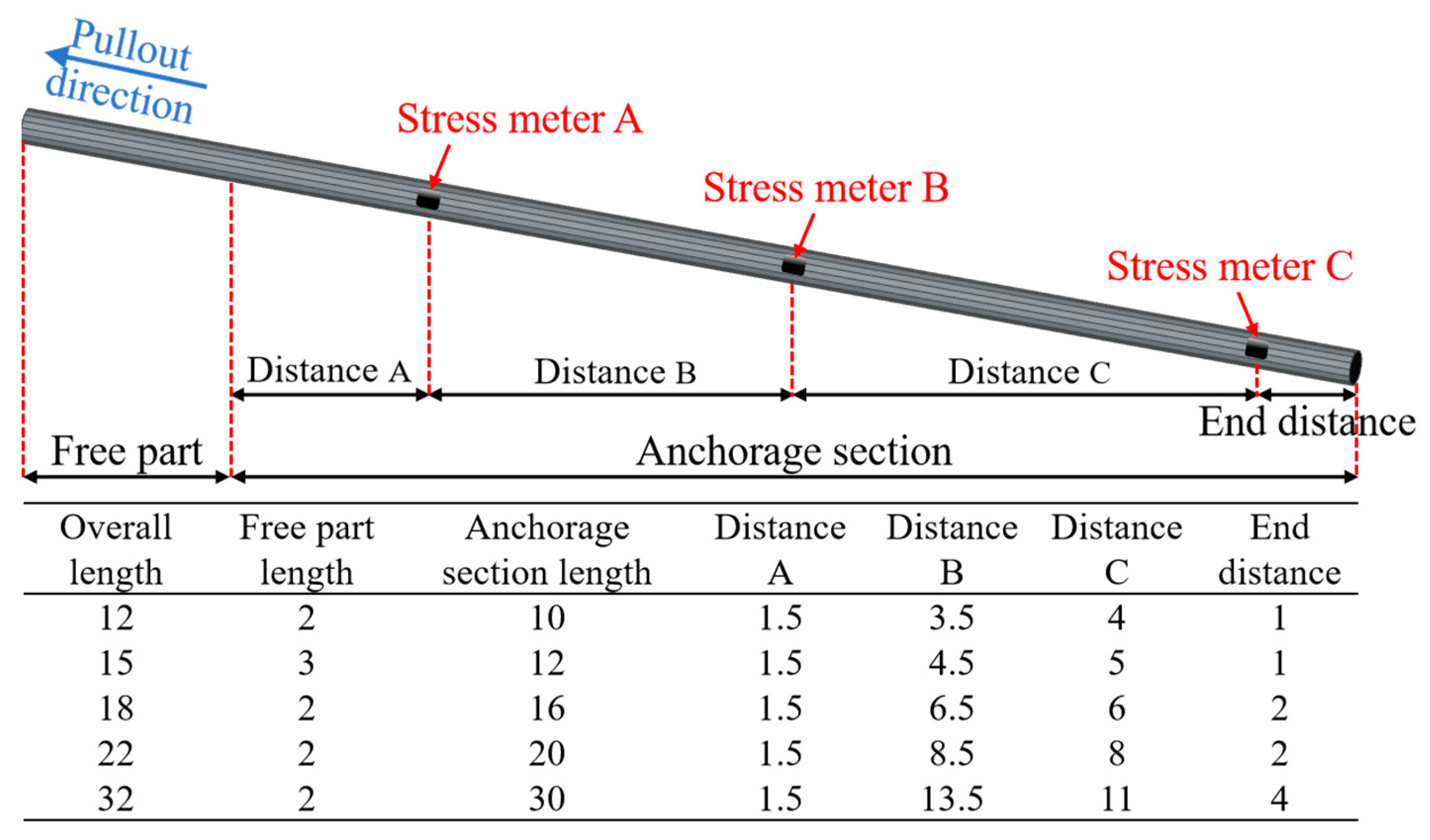
- Bolt installation and grouting: The anchor rod is assembled according to the design length, and the positioning bracket and steel bar stress meter are installed before being manually inserted into the hole. M25 cement paste, with a water–cement ratio of 0.45:1, is injected into the hole using a two-stage grouting process. First, normal pressure grouting is performed at a pressure of 0.3–0.5 MPa. After 2 h, secondary grouting is carried out by inserting the grouting pipe to the bottom of the hole, with a pressure of 1.0–1.5 MPa. Pull-out tests are conducted after 28 days of curing following the grouting.
4. Test Result Analysis
4.1. Analysis of Pull-Out Effects of Bolts with Varying Anchorage Lengths
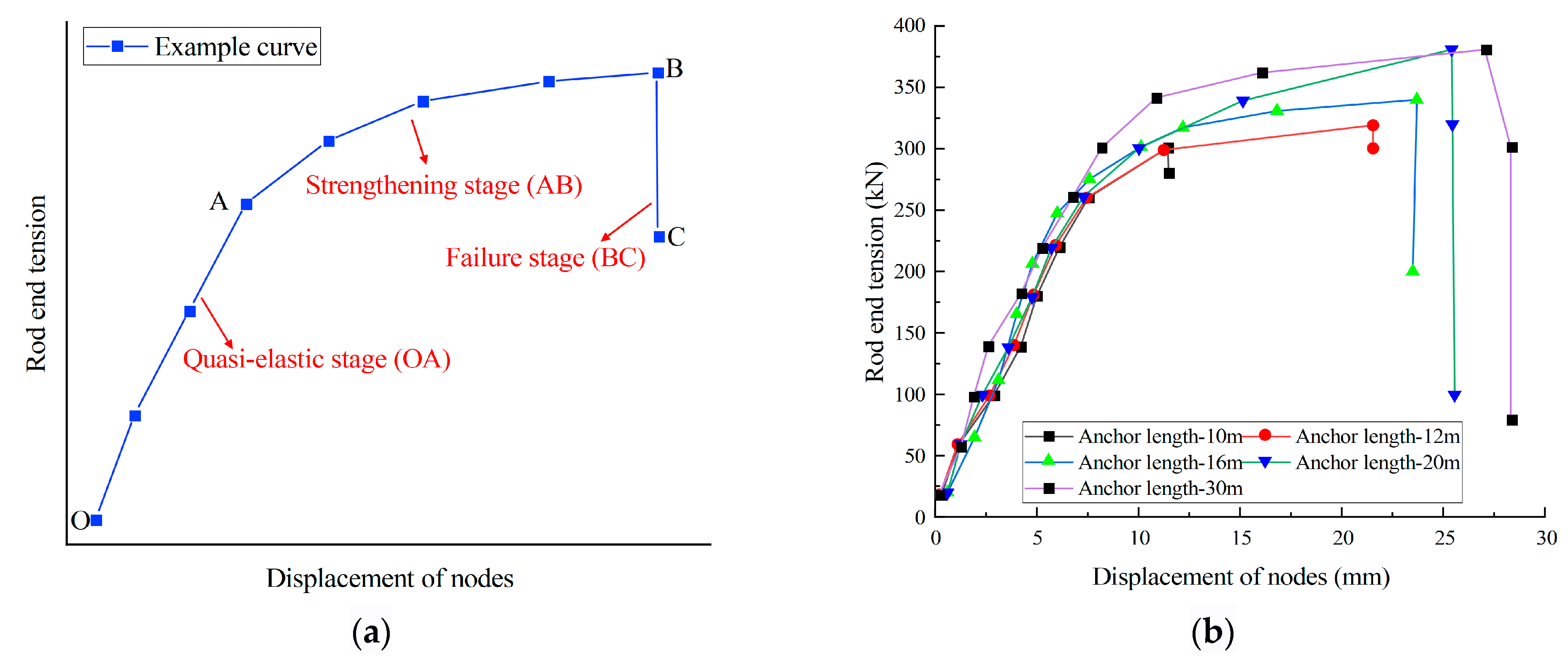
- (1)
- Quasi-elastic stage (OA): the rod end tension and the rod end displacement basically increase linearly, the plastic deformation of the bolt is small, and the rod end tension increases rapidly. The tension value under different anchorage lengths can be found. The load value of point A is the elastic limit.
- (2)
- Strengthening stage (AB): Different from the previous studies on a pull-out test of short bolts, it is found that when the bolt length is long, the curve shows obvious strengthening characteristics. It is because when the length of the bolt is long, with the increase in the tension at the end of the bolt during the drawing process, the friction force, cohesive force and other resistance between the bolt and the rock and soil mass are not evenly exerted. The longer anchorage section enables the bolt to mobilize more rock and soil to participate in the bearing, so that more rock and soil are activated and play a bearing role, which leads to the continuous increase in the tension at the end of the rod and shows the strengthening characteristics. In addition, with the increase in the pull force of the rod end during the drawing process, the relative displacement between the anchor rod and the rock and soil mass increases, and the friction force also increases. The longer anchor rod provides a larger friction area, resulting in the rod end tension continuing to rise, and shows strengthening characteristics. At the same time, when the bolt length is long, the curve does not show the yield characteristics. This is because, compared with the short bolt, the stress distribution of the long bolt body is not uniform. With the gradual increase in the stress in each part during the drawing process, the whole bolt and rock and soil system gradually exert the bearing capacity, and there will be no stress concentration phenomenon, so that a certain part reaches the yield strength first. The synergistic effect between the longer anchor and the surrounding rock and soil is more significant, and the deformation of the anchor will be constrained and limited by the rock and soil, so that the anchor will not show obvious plastic deformation and the yield phenomenon, as will the short anchor under stress, but will show continuous strengthening characteristics. With the increase in the tension at the end of the bolt, the displacement of the end of the bolt increases rapidly, and the plastic deformation of the anchorage body also increases.
- (3)
- Failure stage (BC): After reaching the ultimate pull-out bearing capacity, the tension at the end of the rod continues to increase, and the anchorage body disengages and slips or the bolt body is destroyed. The tension value decreases rapidly, and the displacement at the end of the rod remains unchanged or increases. The failure mechanism of the failure stage mainly has the following two aspects: First, the anchorage body disengages and slips. During the pull-out process of the bolt, the load is mainly transmitted by the cohesive force between the bolt and the surrounding rock and soil. With the increase in the tension at the end of the rod, after reaching the ultimate uplift bearing capacity, the bonding force at the interface between the bolt and the rock and soil is gradually overcome. At the same time, the displacement of the rod end increases rapidly in the strengthening stage, and the plastic deformation of the anchorage body increases, which makes the relative displacement between the bolt and the rock and soil mass accumulate continuously, which leads to the aggravation of the failure of the bonding surface. Finally, the anchorage body disengages and slips, the bolt cannot effectively transfer the load to the surrounding rock and soil mass, and the tension value decreases rapidly. The second aspect is the failure of the anchor rod body. In the strengthening stage, the anchor rod body produces a certain plastic deformation. With the continuous increase in the drawing force, once the plastic deformation accumulates to a certain extent, the bearing capacity of the rod body decreases sharply, which eventually leads to the failure of the rod body, and the tension value also decreases rapidly.
4.2. Analysis of Ultimate Uplift Bearing Capacity
4.3. Distribution Law of Axial Force and Friction Resistance of Bolt
5. Theoretical Analysis
6. Conclusions
- (1)
- The stress process of bolt rod end tension–rod end displacement is divided into three stages, namely quasi-elastic stage, strengthening stage and failure stage. The stress history of bolts with different anchorage lengths is the same, but the curve shape changes from steep to slow with the increase in anchorage length. Under normal working conditions, increasing the length of the bolt can reduce the deformation of the bolt to a certain extent and effectively exert the passive anchoring effect of the bolt.
- (2)
- By increasing the length of the anchor rod, the ultimate uplift bearing capacity of the anchor rod can be improved, but the improvement is very limited. The anchorage length of the anchor rod in the loess layer selected in this experiment is suggested to be 10–16 m, which can not only meet the requirements of engineering safety and quality, but also avoid waste and save cost.
- (3)
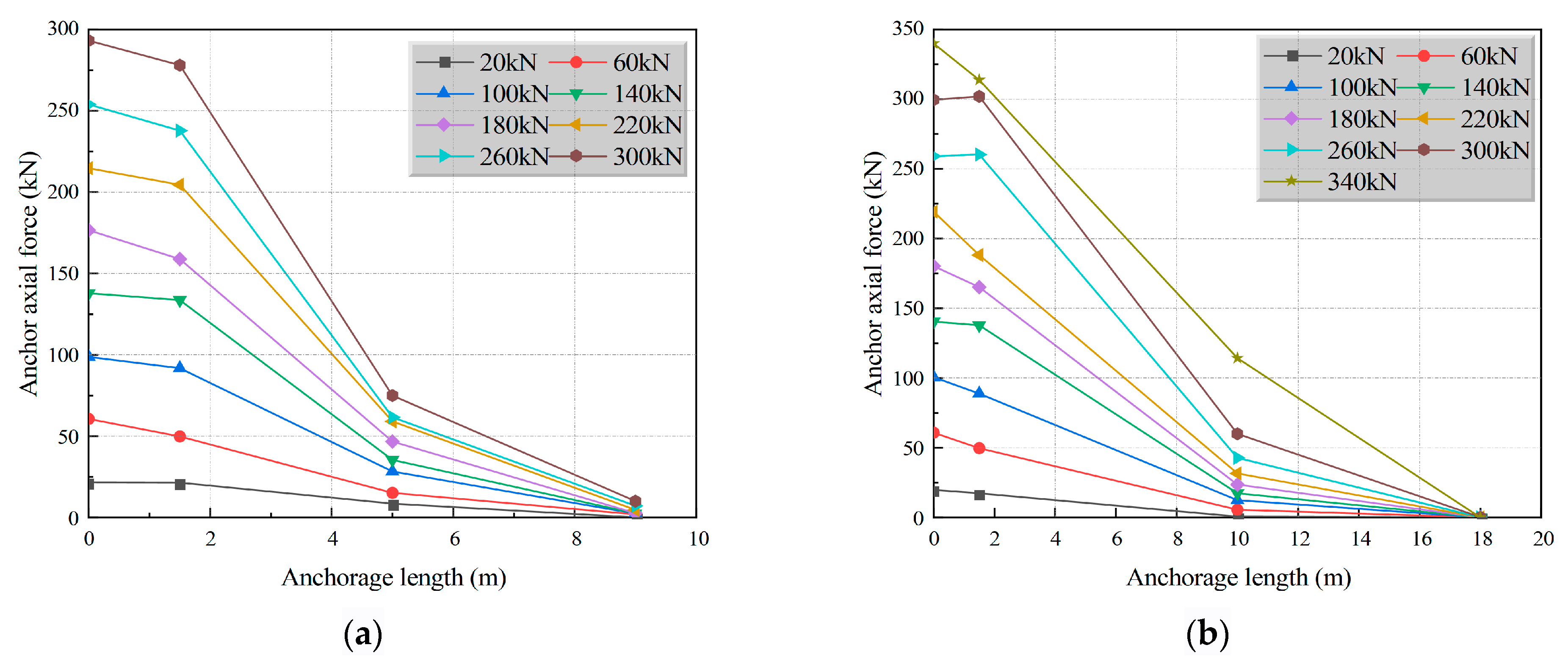
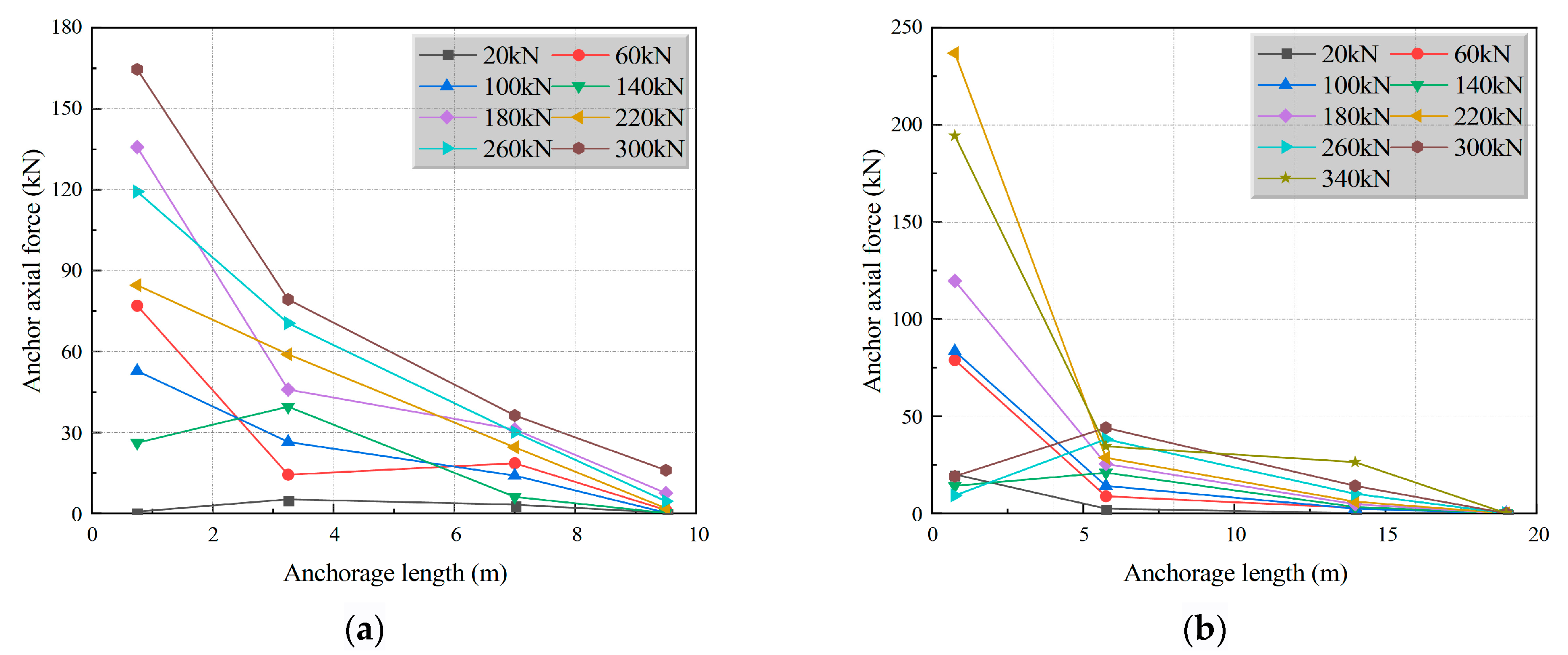
- The axial force of the bolt gradually decays along the length direction of the anchorage section, and the axial force decays the most in the first half of the rod body. Compared with the high anchorage length bolt, the axial force of the low anchorage length bolt is relatively uniform, and the range of axial force is increased. The frictional resistance of the bolt is unevenly distributed along the length direction of the anchorage body, reaching a peak at the front end of the anchorage body, and gradually decreasing with the increase in the anchorage length, showing a single peak curve. When the tension at the end of the rod reaches the ultimate pull-out bearing capacity, the peak friction resistance is basically unchanged with the increase in the anchorage length, while the average friction resistance in the middle of the rod body is significantly reduced.
- (1)
- Data processing and analysis: With the help of big data and cloud computing, the massive monitoring data generated by the increase in applications are efficiently stored, managed and analyzed, and the rules are mined to accurately predict the performance and safety status ; intelligent algorithms such as machine learning and deep learning are studied, and prediction models are established through historical data training to achieve fault diagnosis and early warning, such as using neural networks to evaluate forces.
- (2)
- Material and structure design: Explore new materials (such as high-strength alloy steel, composite materials) to manufacture bolt anchors, improve mechanical properties and durability, and ensure the compatibility of materials and sensors; the structure design is optimized to make the installation, maintenance and replacement more convenient, improve the anti-interference ability and reduce the maintenance cost.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| FBG | Fiber Bragg grating |
| FRP | Fiber-reinforced polymer |
| GFRP | Glass fiber-reinforced polymer |
References
- You, Z.J.; Feng, L.J. Integration of industry 4.0 related technologies in construction industry: A framework of Cyber-Physical system. IEEE Access 2020, 8, 122908–122922. [Google Scholar]
- Zhang, J.P.; Lin, J.R.; Hu, Z.Z.; Wang, Y.W. Digitally driven intelligent construction. Build. Technol. 2022, 53, 1565–1571. [Google Scholar]
- You, Z.J.; Wu, C.; Liu, Z.W. Research review on intelligent construction. J. Civ. Eng. Manag. 2022, 39, 82–87. [Google Scholar]
- Zhang, H.Q.; Miao, X.X.; Zhang, G.M.; Wu, Y.; Chen, Y.L. Non-destructive testing and pre-warning analysis on the quality of bolt support in deep roadways of mining districts. Int. J. Min. Sci. Technol. 2017, 27, 989–998. [Google Scholar] [CrossRef]
- Liang, M.F.; Fang, X.Q.; Xue, G.Z.; Li, H.W.; Wu, G. Development and field test of FBG bolt dynamometer. J. Min. Saf. Eng. 2017, 34, 549–555. [Google Scholar]
- Wang, G.X.; Huang, P.; Zhao, J. Research on early warning threshold of bolt supporting slope and development of intelligent monitoring system. J. Shenyang Jianzhu Univ. (Nat. Sci. Ed.) 2021, 37, 668–675. [Google Scholar]
- Lin, L.B.; Dong, X.P. Identification method and experiment of bolt lateral load based on fiber grating sensing technology. J. Xiamen Univ. (Nat. Sci. Ed.) 2023, 62, 576–581. [Google Scholar]
- Liu, Q. Research on the Application of Intelligent FRP Bolt in Slope Reinforcement and Monitoring. Master’s Thesis, Harbin University of Technology, Harbin, China, 2021. [Google Scholar]
- Cheng, S.H.; Chen, S.S.; Yang, K.H. Self-inspection system for ground anchors monitoring on long-term load change. Transp. Geotech. 2022, 36, 100825. [Google Scholar] [CrossRef]
- Bai, X.Y.; Zhang, M.Y.; Kuang, Z.; Wang, Y.H.; Yan, N.; Zhu, L. Application of fiber grating sensing technology in pull-out test on glass fiber reinforced polymer anti-floating anchor. Rock Soil Mech. 2018, 39, 3891–3899. [Google Scholar]
- Xu, S.; Guo, M.Z.; Ji, X.B.; Yang, Z.M. Based on intelligent testing system of drawing bolt anchoring force field efficient evaluation method. J. Met. Mine 2022, 551, 56–61. [Google Scholar]
- Wang, H.D.; Qin, Y.B.; Cui, T.J.; Ma, Y.D. Remote monitoring and early warning system of Deep foundation pit envelope deformation. J. Liaoning Tech. Univ. (Nat. Sci. Ed.) 2013, 32, 14–18. [Google Scholar]
- Liao, Y.; Qiao, S.C.; Huang, H.R.; Deng, Y.; Gui, J.Y.; Yang, T. Support design and application of intelligent monitoring technology for a super high-rise deep foundation pit. J. Guilin Univ. Technol. 2023, 43, 100–107. [Google Scholar]
- Huang, M.H. Analysis of Pulling Load Transfer of Rock and Soil Bolt and Monitoring Verification of FRP Smart Bolt. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2014. [Google Scholar]
- Cheng, L.K.; Fan, J.L.; Zhang, P.W.; Zhou, J.M. The ways and methods to improve the bearing capacity of geotechnical anchor uplift and its effect. Ind. Constr. 2015, 45, 103–109. [Google Scholar]
- Wu, Q. Study on Action Mechanism and Applicability of Recoverable Prestressed Anchor Bolt (Cable). Master’s Thesis, Lanzhou University of Technology, Lanzhou, China, 2022. [Google Scholar]
- Mirzaghorbanali, A.; Rasekh, H.; Aziz, N.; Yang, G.Y.; Khaleghparast, S.; Nemcik, J. Shear strengthproperties of cable bolts using a new double shear instrument, ex-perimental study, and numerical simulation. Tunn. Undergr. Space Technol. 2017, 40, 240–253. [Google Scholar]
- Malvar, L.J. Tensile and bond properties of GFRP reinforcingbars. ACI Mater. J. 1995, 92, 276–285. [Google Scholar]
- Sun, T.; Zhou, F.Y.; Liu, Q.; Yang, J.J.; Liu, T.C. Test study of glass fiber reinforced polymer anchor head. J. China Res. Inst. Water Resour. Hydropower Res. 2017, 15, 250–255. [Google Scholar]
- Song, Y.M.; Deng, L.L.; Lv, X.F.; Zhao, Z.X.; Wu, J.N. Study on the law of force transfer of anchoring system in bolt drawing process. J. Min. Saf. Eng. 2008, 35, 1122–1128. [Google Scholar]
- Xiao, T.Q.; Li, H.M.; Li, H.Y.M. Wang. Pull-out properties of bolt with different anchorage length. J. Min. Saf. Eng. 2017, 34, 1075–1080. [Google Scholar]
- Tu, B.X.; Li, S.C. In-situ test study on critical anchoring length of weathering rock bolt. Cryog. Build. Technol. 2018, 40, 84–89. [Google Scholar]
- GB50330-2013; Technical Code for Building Slope Engineering. Ministry of Housing and Urban-Rural Development. China Construction Industry Press: Beijing, China, 2013.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bar Parameters | Diameter | Yield Load | Failure Load | Elastic Modulus |
|---|---|---|---|---|
| Numerical value | 28 mm | 246 kN | 332 kN | 200 GPa |
| Anchorage Length | Load/kN | Displacement/mm | Load/kN | Displacement/mm | Load/kN | Displacement/mm |
|---|---|---|---|---|---|---|
| 10 m | 220 | 6.1 | 260 | 7.5 | 300 | 11.5 |
| 12 m | 260 | 7.4 | 300 | 11.2 | 320 | 21.5 |
| 16 m | 280 | 8.6 | 320 | 12.3 | 340 | 23.7 |
| 20 m | 300 | 10.0 | 340 | 15.1 | 380 | 25.3 |
| 30 m | 340 | 11.0 | 360 | 16.1 | 380 | 27.2 |
| NO. | Free Part/m | Anchorage Section/m | k/kPa |
|---|---|---|---|
| A-1-2 | 2 | 10 | 423.31 |
| A-1-9 | 3 | 12 | 315.75 |
| B-2-1 | 2 | 16 | 433.98 |
| B-2-9 | 2 | 20 | 566.59 |
| C-1-3 | 2 | 30 | 757.65 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zhang, H.; Li, X.; He, J. Pull-Out Test and Mechanical Properties Analysis Based on Intelligent Bolt and Internet of Things. Appl. Sci. 2025, 15, 3901. https://doi.org/10.3390/app15073901
Li Z, Zhang H, Li X, He J. Pull-Out Test and Mechanical Properties Analysis Based on Intelligent Bolt and Internet of Things. Applied Sciences. 2025; 15(7):3901. https://doi.org/10.3390/app15073901
Chicago/Turabian StyleLi, Zengle, Huimei Zhang, Xin Li, and Junliang He. 2025. "Pull-Out Test and Mechanical Properties Analysis Based on Intelligent Bolt and Internet of Things" Applied Sciences 15, no. 7: 3901. https://doi.org/10.3390/app15073901
APA StyleLi, Z., Zhang, H., Li, X., & He, J. (2025). Pull-Out Test and Mechanical Properties Analysis Based on Intelligent Bolt and Internet of Things. Applied Sciences, 15(7), 3901. https://doi.org/10.3390/app15073901