
Fluid–Structure Interaction Study in Unconventional Energy Horizontal Wells Driven by Recursive Algorithm and MPS Method

Abstract
1. Introduction
2. Bidirectional FSI Numerical Model
2.1. Dynamic Modeling
2.1.1. Multi-Body Model
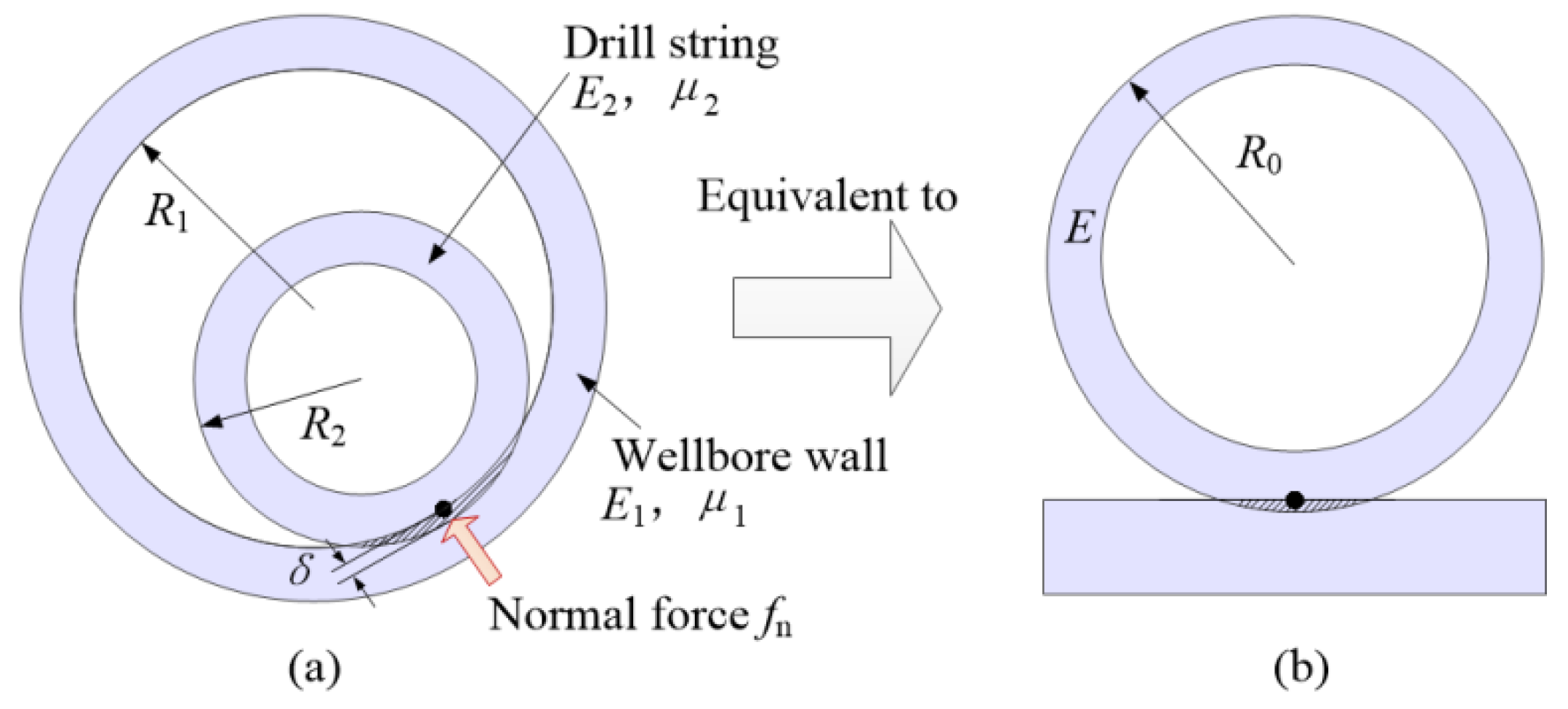
2.1.2. Drill String–Wellbore Wall Contact Force
2.2. Fluid Domain Solution
2.2.1. MPS Method
2.2.2. Boundary Conditions
2.3. Bidirectional FSI Algorithm
2.4. Experiments and Validation
2.4.1. Experimental Setup
2.4.2. Validation
3. Results and Discussion
3.1. Dynamic Response Under Drilling Parameters
3.2. Impact of Drilling Fluid
3.2.1. Drill String Vibration Response
3.2.2. Impact of Flow Rate
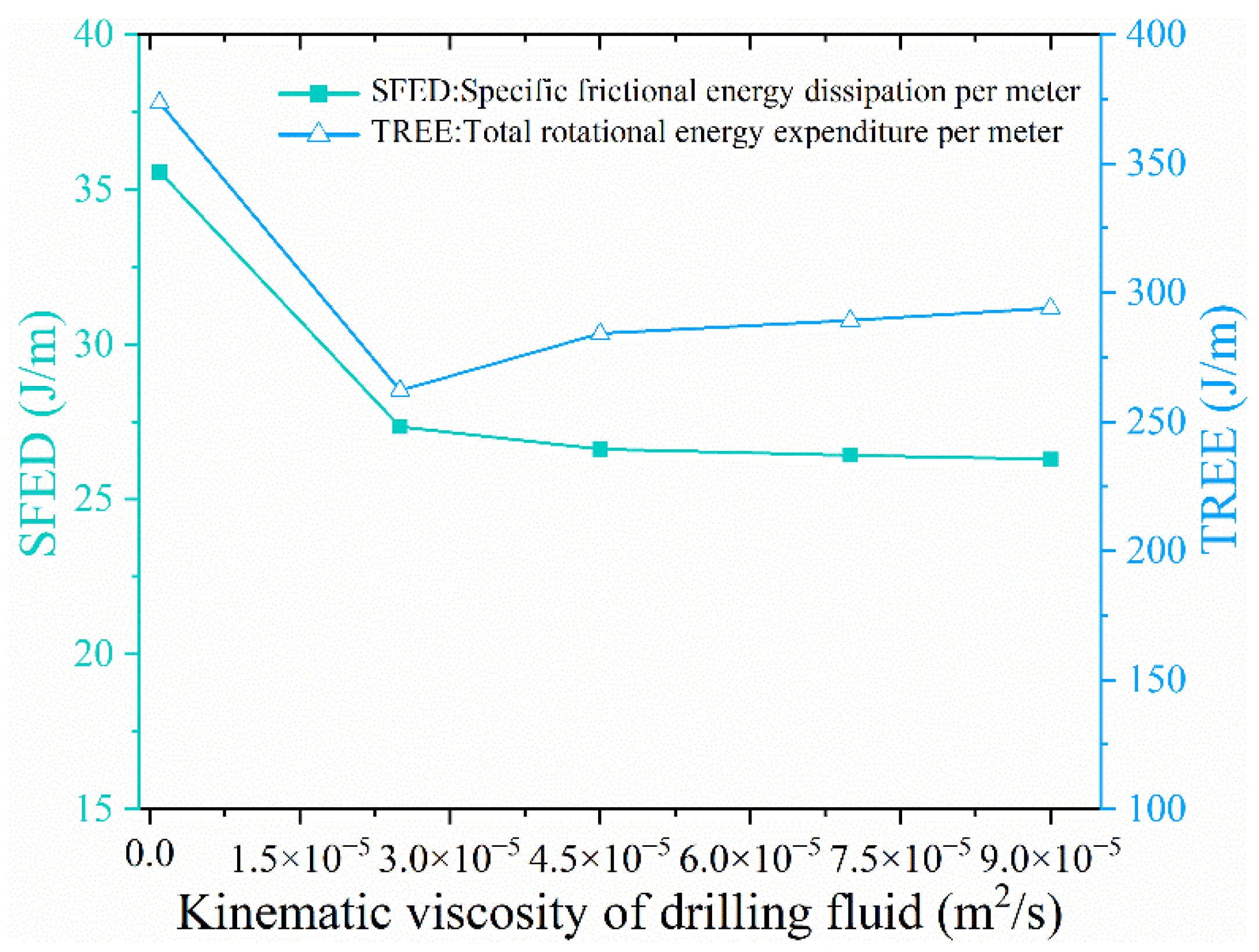
3.2.3. Impact of Kinematic Viscosity
3.2.4. Impact of Density
3.2.5. Comprehensive Parameter Sensitivity Analysis
3.3. Impact of Formation and Friction
4. Conclusions
- (1)
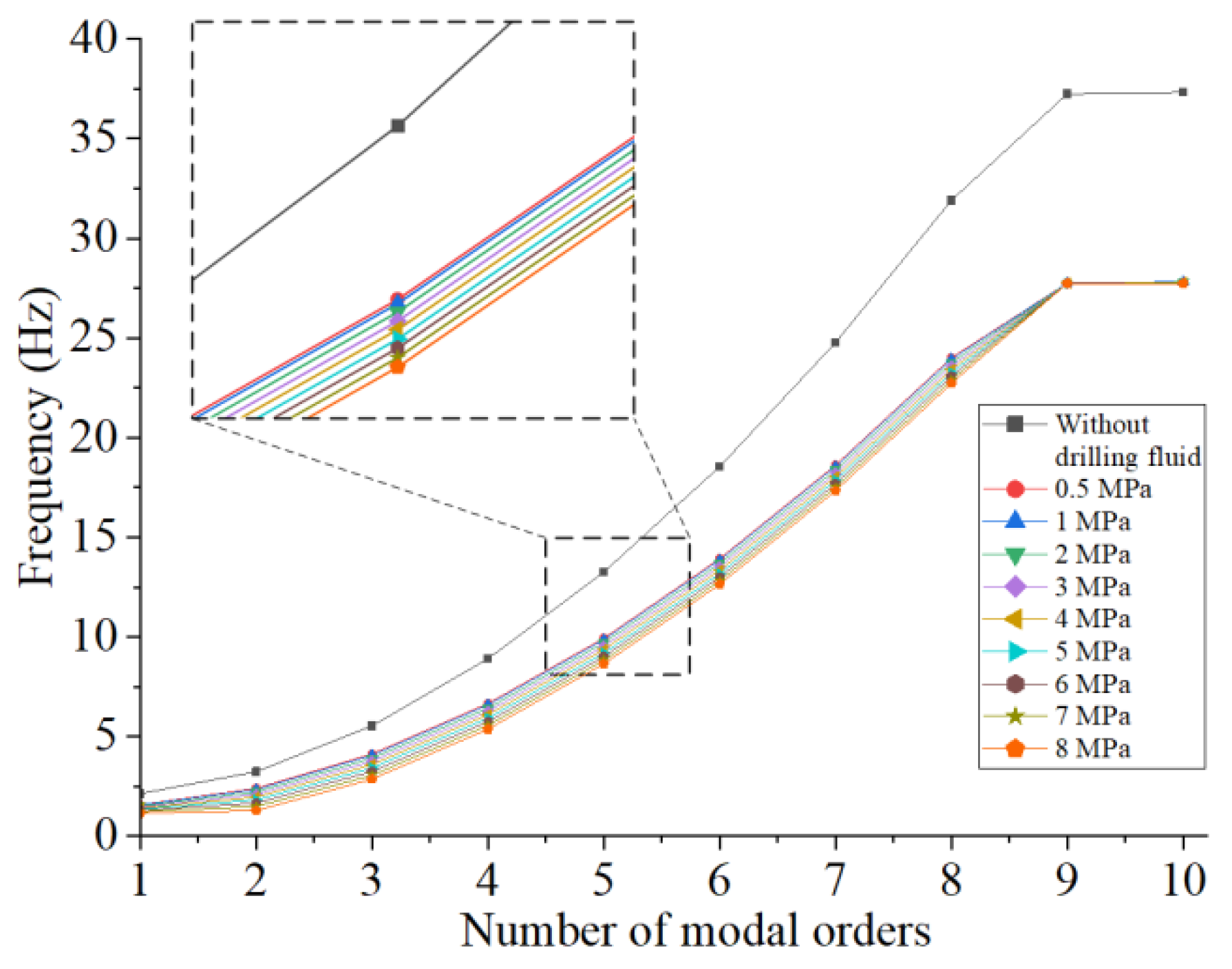
- Drilling fluid lowers the drill string natural frequency by 20–25%, with low-order modes showing lateral coupled vibrations. An increased pump pressure (0.5–8 MPa) further reduces the second-order frequency by up to 46.5%, requiring monitoring of the low-order modes to prevent resonance.
- (2)
- Dominant frictional energy dissipation occurs from persistent drill string–wellbore contact (lower right). Eccentric annular fluid pressure significantly reduces this friction; under benchmark conditions, SFED and TREE decreased by 24.28% and 27.41%, respectively. While most parameter increases reduce SFED, TREE slightly rises if viscosity exceeds 2.5 × 10−5 m2/s, leading to laminar flow detrimental to wellbore cleaning.
- (3)
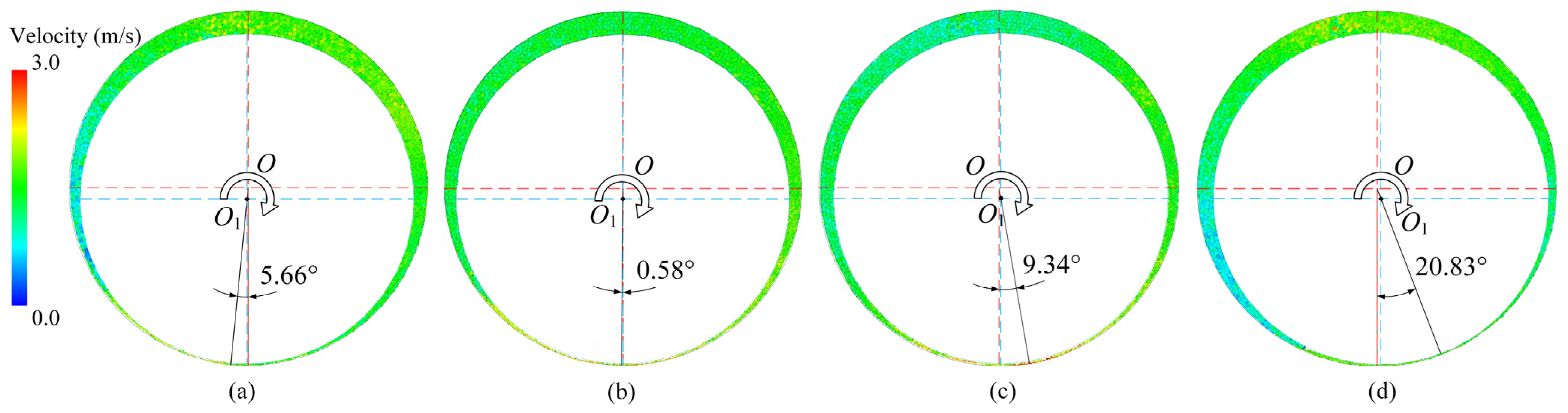
- Horizontal drill string displacement favors the right side, but a kinematic viscosity > 2.5 × 10−5 m2/s causes anomalous leftward shifts and introduces radial velocity gradients. Inherent circumferential flow asymmetry aids wellbore cleaning.
- (4)
- A critical friction coefficient of 0.15 stabilizes the drill string centrally. Excessive lateral displacement causes asymmetric cuttings’ accumulation, impacting fracturing. Managing viscosity and drag reducers based on subcritical or supercritical friction is key to controlling deflection and cuttings buildup.
- (5)
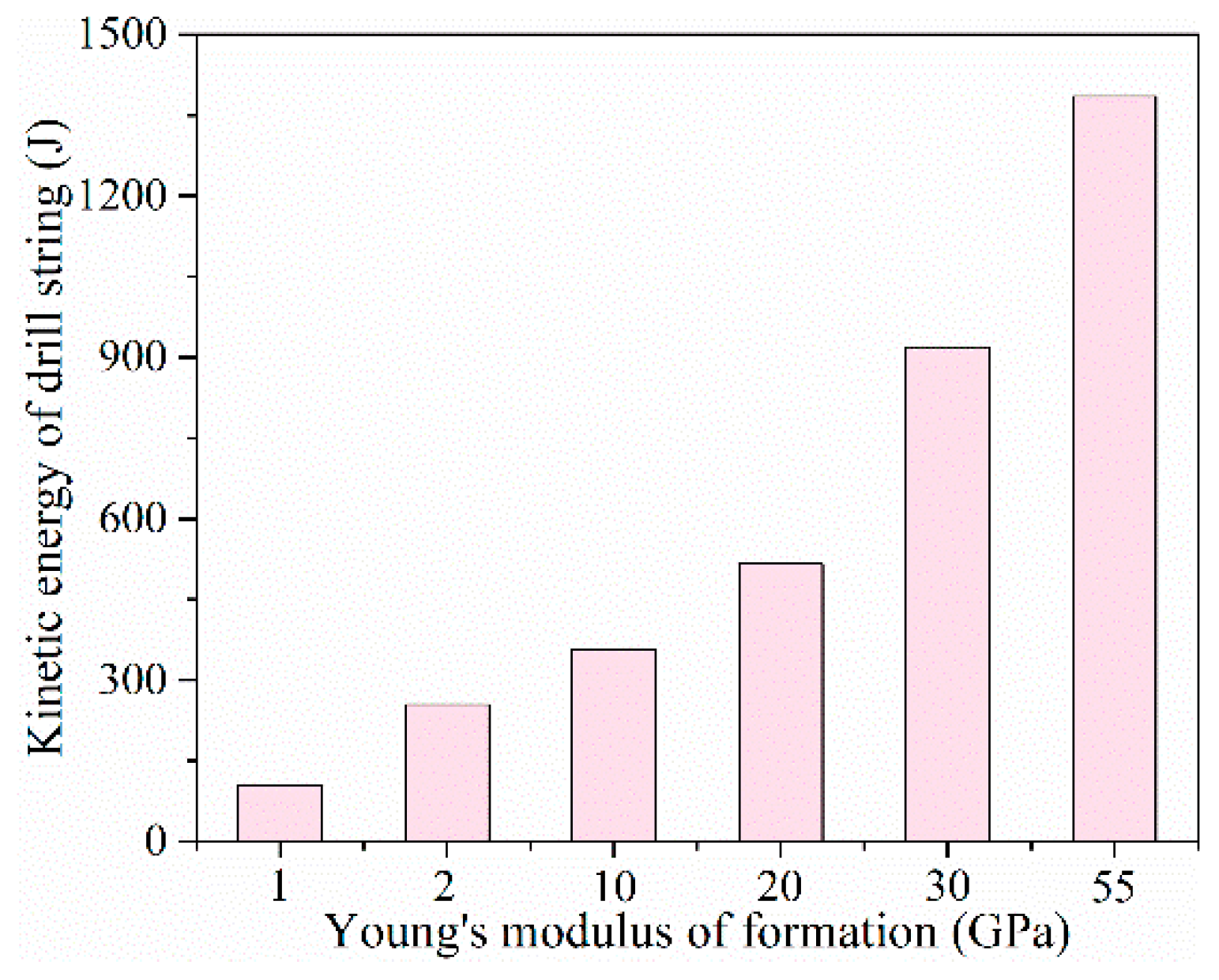
- High-Young’s-modulus formations increase drill string vibrations, the lateral coupled resonance risk, impact forces, and failure likelihood.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sabanov, S.; Qureshi, A.R.; Dauitbay, Z.; Kurmangazy, G. A Method for the Modified Estimation of Oil Shale Mineable Reserves for Shale Oil Projects: A Case Study. Energies 2023, 16, 5853. [Google Scholar] [CrossRef]
- Jintao, A.; Jun, L.; Huang, H.; Zhang, H.; Yang, H.; Zhang, G.; Chen, S.; Lai, Q. Analysis of Cuttings Transport in Small-Bore Horizontal Wells Considering Drill String Eccentricity. Energy Sci. Eng. 2025, 13, 3088–3106. [Google Scholar] [CrossRef]
- Tengesdal, N.K.; Fotland, G.; Holden, C.; Haugen, B. Modeling of drill string dynamics in directional wells for real-time simulation. Simulation 2023, 99, 937–956. [Google Scholar] [CrossRef]
- Nguyen, K.-L.; Tran, Q.-T.; Andrianoely, M.-A.; Manin, L.; Baguet, S.; Dufour, R.; Mahjoub, M.; Menand, S. Nonlinear rotordynamics of a drillstring in curved wells: Models and numerical techniques. Int. J. Mech. Sci. 2020, 166, 105225. [Google Scholar] [CrossRef]
- Liu, Y.; Niu, Y.; Guan, Z.; Lyu, S. The review and development of devices with an increasing rate of penetration (ROP) in deep formation drilling based on drill string vibration. Energies 2022, 15, 7377. [Google Scholar] [CrossRef]
- Berlioz, A.; Der Hagopian, J.; Dufour, R.; Draoui, E. Dynamic Behavior of a Drill-String: Experimental Investigation of Lateral Instabilities. J. Vib. Acoust. 1996, 118, 292–298. [Google Scholar] [CrossRef]
- Tchomeni Kouejou, B.X.; Sozinando, D.F.; Anyika Alugongo, A. Modeling and Analysis of Drill String–Casing Collision under the Influence of Inviscid Fluid Forces. Appl. Sci. 2023, 13, 3557. [Google Scholar] [CrossRef]
- Mohammadzadeh, M.; Arbabtafti, M.; Shahgholi, M.; Yang, J. Nonlinear vibrations of composite drill strings considering drill string–wellbore contact and bit–rock interaction. Arch. Appl. Mech. 2022, 92, 2569–2592. [Google Scholar] [CrossRef]
- Patil, P.A.; Teodoriu, C. A comparative review of modelling and controlling torsional vibrations and experimentation using laboratory setups. J. Pet. Sci. Eng. 2013, 112, 227–238. [Google Scholar] [CrossRef]
- Goicoechea, H.E.; Lima, R.; Sampaio, R. How to mathematically model a drill-string: Lumped or continuous models? Chaos Solitons Fractals 2024, 188, 115543. [Google Scholar] [CrossRef]
- Bembenek, M.; Grydzhuk, Y.; Gajdzik, B.; Ropyak, L.; Pashechko, M.; Slabyi, O.; Al-Tanakchi, A.; Pryhorovska, T. An analytical–numerical model for determining “drill string–wellbore” frictional interaction forces. Energies 2024, 17, 301. [Google Scholar] [CrossRef]
- Heisig, G.; Neubert, M. Lateral Drillstring Vibrations in Extended-Reach Wells. In Proceedings of the IADC/SPE Drilling Conference, New Orleans, LA, USA, 23 February 2000. [Google Scholar]
- Galasso, S.; Santelli, L.; Zambetti, R.; Giusteri, G.G. Simulation of drill-string systems with fluid–structure and contact interactions in realistic geometries. Comput. Mech. 2024, 75, 1165–1189. [Google Scholar] [CrossRef]
- Chodankar, A.D.; Seibi, A. Effects of axial compression load, borehole clearance, and contact force using axial-lateral fluid coupled drill string vibration model. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Salt Lake City, UT, USA, 11–14 November 2019; American Society of Mechanical Engineers: New York, NY, USA, 2019; p. V004T05A112. [Google Scholar]
- Tengesdal, N.K.; Holden, C.; Pedersen, E. Component-based modeling and simulation of nonlinear drill-string dynamics. J. Offshore Mech. Arct. Eng. 2022, 144, 021801. [Google Scholar] [CrossRef]
- Neto, H.J.C.; Trindade, M.A. Mitigation of negative damping effects in deep drilling operations through active control. J. Sound Vib. 2025, 610, 119078. [Google Scholar] [CrossRef]
- Barjini, A.H.; Khoshnazar, M.; Moradi, H. Design of a sliding mode controller for suppressing coupled axial & torsional vibrations in horizontal drill strings using Extended Kalman Filter. J. Sound Vib. 2024, 586, 118477. [Google Scholar]
- Ejike, C.; Abid, K.; Teodoriu, C. Scaling Torsional Drilling Vibrations: A Simulation-Based Comparison of Downscale and Upscale Drill Strings Under Varying Torque Conditions. Appl. Sci. 2025, 15, 2399. [Google Scholar] [CrossRef]
- Arjun Patil, P.; Teodoriu, C. Model development of torsional drillstring and investigating parametrically the stick-slips influencing factors. J. Energy Resour. Technol. 2013, 135, 013103. [Google Scholar] [CrossRef]
- Chen, W.; Cao, Y.; Guo, X.; Ma, H.; Wen, B.; Wang, B. Semi-analytical dynamic modeling and fluid-structure interaction analysis of L-shaped pipeline. Thin-Walled Struct. 2024, 196, 111485. [Google Scholar] [CrossRef]
- Bouaanani, N.; Miquel, B. Efficient modal dynamic analysis of flexible beam–fluid systems. Appl. Math. Model. 2015, 39, 99–116. [Google Scholar] [CrossRef]
- Abdollahi, R.; Firouz-abadi, R.D.; Rahmanian, M. On the stability of rotating pipes conveying fluid in annular liquid medium. J. Sound Vib. 2021, 494, 115891. [Google Scholar] [CrossRef]
- Liao, M.; Zhou, Y.; Su, Y.; Lian, Z.; Jiang, H. Dynamic analysis and multi-objective optimization of an offshore drilling tube system with pipe-in-pipe structure. Appl. Ocean. Res. 2018, 75, 85–99. [Google Scholar] [CrossRef]
- Matuck, G.A.; Gama, A.L.; Lannes, D.P.; Bento, T.F.B. Hydrodynamic mass and damping of horizontal tubes subjected to internal two-phase flow. J. Sound Vib. 2022, 532, 117004. [Google Scholar] [CrossRef]
- Pei, Y.-C.; Sun, Y.-H.; Wang, J.-X. Dynamics of rotating conveying mud drill string subjected to torque and longitudinal thrust. Meccanica 2013, 48, 2189–2201. [Google Scholar] [CrossRef]
- Fujita, K.; Moriasa, A. Stability of cantilevered pipes subjected to internal flow and external annular axial flow simultaneously. In Proceedings of the Pressure Vessels and Piping Conference, Boston, MA, USA, 19–23 July 2015; American Society of Mechanical Engineers: New York, NY, USA, 2015; p. V004T04A020. [Google Scholar]
- Paı, M.; Luu, T.; Prabhakar, S. Dynamics of a long tubular cantilever conveying fluid downwards, which then flows upwards around the cantilever as a confined annular flow. J. Fluids Struct. 2008, 24, 111–128. [Google Scholar]
- Mihajlović, N.; van Veggel, A.A.; van de Wouw, N.; Nijmeijer, H. Analysis of Friction-Induced Limit Cycling in an Experimental Drill-String System. J. Dyn. Syst. Meas. Control. 2005, 126, 709–720. [Google Scholar] [CrossRef]
- Tran, Q.-T.; Nguyen, K.-L.; Manin, L.; Andrianoely, M.-A.; Dufour, R.; Mahjoub, M.; Menand, S. Nonlinear dynamics of directional drilling with fluid and borehole interactions. J. Sound Vib. 2019, 462, 114924. [Google Scholar] [CrossRef]
- Ozbayoglu, E.M.; Erge, O.; Ozbayoglu, M.A. Predicting the pressure losses while the drillstring is buckled and rotating using artificial intelligence methods. J. Nat. Gas Sci. Eng. 2018, 56, 72–80. [Google Scholar] [CrossRef]
- Abdo, J.; Al-Shabibi, A.; Al-Sharji, H. Effects of tribological properties of water-based drilling fluids on buckling and lock-up length of coiled tubing in drilling operations. Tribol. Int. 2015, 82, 493–503. [Google Scholar] [CrossRef]
- Abdo, J.; Haneef, M. Clay nanoparticles modified drilling fluids for drilling of deep hydrocarbon wells. Appl. Clay Sci. 2013, 86, 76–82. [Google Scholar] [CrossRef]
- Liyanarachchi, S.; Rideout, G. Improved stiff string torque and drag prediction using a computationally efficient contact algorithm. Math. Comput. Model. Dyn. Syst. 2024, 30, 417–443. [Google Scholar] [CrossRef]
- Moharrami, M.J.; de Arruda Martins, C.; Shiri, H. Nonlinear integrated dynamic analysis of drill strings under stick-slip vibration. Appl. Ocean. Res. 2021, 108, 102521. [Google Scholar] [CrossRef]
- Guo, X.; Qiu, Z.; Li, M.; Li, X.; Hu, N.; Zhao, L.; Ye, C. Axial-torsional coupling vibration model and nonlinear behavior of drill string system in oil and gas wells. Commun. Nonlinear Sci. Numer. Simul. 2025, 142, 108560. [Google Scholar] [CrossRef]
- Asghar Jafari, A.; Kazemi, R.; Faraji Mahyari, M. The effects of drilling mud and weight bit on stability and vibration of a drill string. J. Vib. Acoust. 2012, 134, 011014. [Google Scholar] [CrossRef]
- Tang, S.; Liang, Z.; Zhao, G.-H. Stability of transverse vibration of drillstring conveying drilling fluid. J. Theor. Appl. Mech. 2020, 58, 1061–1074. [Google Scholar] [CrossRef]
- Guzek, A.; Shufrin, I.; Pasternak, E.; Dyskin, A.V. Influence of drilling mud rheology on the reduction of vertical vibrations in deep rotary drilling. J. Pet. Sci. Eng. 2015, 135, 375–383. [Google Scholar] [CrossRef]
- Passos Volpi, L.; Cayeux, E.; Wiggo Time, R. A Coupled Fluid-Structure Model for Estimation of Hydraulic Forces on the Drill-Pipes. J. Offshore Mech. Arct. Eng. 2024, 146, 031801. [Google Scholar] [CrossRef]
- Al Dushaishi, M.F.; Nygaard, R.; Stutts, D.S. Effect of drilling fluid hydraulics on drill stem vibrations. J. Nat. Gas Sci. Eng. 2016, 35, 1059–1069. [Google Scholar] [CrossRef]
- Liu, J.; Chen, Y.; Liang, S.; Cai, M.; Md, Y. Influence of non-Newton rheological parameters of drilling fluid on axial-lateral-torsional coupling vibration of rotating drill string. Geoenergy Sci. Eng. 2024, 232, 212415. [Google Scholar] [CrossRef]
- Volpi, L.; Cayeux, E.; Time, R.W. Whirling dynamics of a drill-string with fluid–structure interaction. Geoenergy Sci. Eng. 2024, 232, 212423. [Google Scholar] [CrossRef]
- Luo, Y.; Qian, F.; Sun, H.; Wang, X.; Chen, A.; Zuo, L. Rigid-flexible coupling multi-body dynamics modeling of a semi-submersible floating offshore wind turbine. Ocean. Eng. 2023, 281, 114648. [Google Scholar] [CrossRef]
- Samei, H.; Chhabra, R. SuRFR: A fast recursive simulator for soft manipulators with discrete joints on SE (3). Mech. Mach. Theory 2024, 194, 105589. [Google Scholar] [CrossRef]
- Schiehlen, W.; Guse, N.; Seifried, R. Multibody dynamics in computational mechanics and engineering applications. Comput. Methods Appl. Mech. Eng. 2006, 195, 5509–5522. [Google Scholar] [CrossRef]
- Liu, C.; Tian, Q.; Hu, H. Dynamics and control of a spatial rigid-flexible multibody system with multiple cylindrical clearance joints. Mech. Mach. Theory 2012, 52, 106–129. [Google Scholar] [CrossRef]
- Tian, Q.; Lou, J.; Mikkola, A. A new elastohydrodynamic lubricated spherical joint model for rigid-flexible multibody dynamics. Mech. Mach. Theory 2017, 107, 210–228. [Google Scholar] [CrossRef]
- Zheng, E.; Wang, T.; Guo, J.; Zhu, Y.; Lin, X.; Wang, Y.; Kang, M. Dynamic modeling and error analysis of planar flexible multilink mechanism with clearance and spindle-bearing structure. Mech. Mach. Theory 2019, 131, 234–260. [Google Scholar] [CrossRef]
- Li, X.; Shao, W.; Tang, J.; Zhang, D.; Chen, J.; Zhao, J.; Wen, Y. Multi-physics field coupling interface lubrication contact analysis for gear transmission under various finishing processes. Eng. Fail. Anal. 2024, 165, 108742. [Google Scholar] [CrossRef]
- Gonzalez-Perez, I.; Iserte, J.L.; Fuentes, A. Implementation of Hertz theory and validation of a finite element model for stress analysis of gear drives with localized bearing contact. Mech. Mach. Theory 2011, 46, 765–783. [Google Scholar] [CrossRef]
- Zhou, C.; Wang, H. An adhesive wear prediction method for double helical gears based on enhanced coordinate transformation and generalized sliding distance model. Mech. Mach. Theory 2018, 128, 58–83. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, L. Curvature-based framework for contact analysis of complex tooth surfaces. Int. J. Mech. Sci. 2025, 293, 110147. [Google Scholar] [CrossRef]
- Chen, S.; Wei, J.; Wei, H.; Tan, Y.; Liu, C. A comprehensive mesh stiffness model for heavy-duty spiral bevel gear pair based on design and manufacturing collaboration. Mech. Mach. Theory 2025, 209, 106005. [Google Scholar] [CrossRef]
- Bu, H.; Li, J.; Guo, J.; Gao, Z.; Zhao, Y. Establishment of theoretical model and dynamic analysis of gear meshing force for the multi-gear driving system considering the effect of friction. Eng. Fail. Anal. 2025, 171, 109382. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, K.; Piao, M.; Wang, X.; Mao, J.; Song, Q. Virtual Simulation Analysis of Rigid-Flexible Coupling Dynamics of Shearer with Clearance. Shock. Vib. 2018, 2018, 6179054. [Google Scholar] [CrossRef]
- Deng, X.; Wang, S.; Hammi, Y.; Qian, L.; Liu, Y. A combined experimental and computational study of lubrication mechanism of high precision reducer adopting a worm gear drive with complicated space surface contact. Tribol. Int. 2020, 146, 106261. [Google Scholar] [CrossRef]
- Renzi, E.; Dias, F. Application of a moving particle semi-implicit numerical wave flume (MPS-NWF) to model design waves. Coast. Eng. 2022, 172, 104066. [Google Scholar] [CrossRef]
- Khayyer, A.; Tsuruta, N.; Shimizu, Y.; Gotoh, H. Multi-resolution MPS for incompressible fluid-elastic structure interactions in ocean engineering. Appl. Ocean. Res. 2019, 82, 397–414. [Google Scholar] [CrossRef]
- Liu, X.; Morita, K.; Zhang, S. An advanced moving particle semi-implicit method for accurate and stable simulation of incompressible flows. Comput. Methods Appl. Mech. Eng. 2018, 339, 467–487. [Google Scholar] [CrossRef]
- Bazaluk, O.; Velychkovych, A.; Ropyak, L.; Pashechko, M.; Pryhorovska, T.; Lozynskyi, V. Influence of heavy weight drill pipe material and drill bit manufacturing errors on stress state of steel blades. Energies 2021, 14, 4198. [Google Scholar] [CrossRef]
- Chudyk, I.; Sudakova, D.; Dreus, A.; Pavlychenko, A.; Sudakov, A. Determination of the thermal state of a block gravel filter during its transportation along the borehole. Min. Miner. Depos. 2023, 17, 75–82. [Google Scholar] [CrossRef]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Drill String | Wellbore Wall | ||
|---|---|---|---|---|
| Actual Value | Simulated Value | Actual Value | Simulated Value | |
| Young’s modulus (GPa) | 205 | 2.2 | 55 | 2.6 |
| Poisson’s ratio | 0.29 | 0.394 | 0.26 | 0.35 |
| Density (kg/m3) | 7850 | 1100 | 2600 | 1180 |
| Condition | Parameter | Explicit Dynamics | Recursive Algorithm | Efficiency Improvement (vs. Explicit Dynamics) |
|---|---|---|---|---|
| Condition 1 | Mesh Size (mm) | 1.8 | 1.8 | 59.3% |
| Element Count | 422,682 | 356,520 | ||
| Total Sim. Time (Days) | 4.3 | 1.75 | ||
| Condition 2 | Mesh Size (mm) | 8 | 8 | 56.3% |
| Element Count | 132,400 | 124,800 | ||
| Total Sim. Time (Days) | 0.96 | 0.42 |
| Parameter | Parameter Range | Response Range of Reduction | |
|---|---|---|---|
| SFED | TREE | ||
| Flow rate Q (L/min) | 30–70 | −16.43–32.79% | −21.56–34.6% |
| Kinematic viscosity η (m2/s) | 1 × 10−6–9 × 10−5 | −24.28–44.02% | −27.41–49.06% |
| Density ρ (kg/m3) | 1000–1400 | −24.28–42.5% | −27.41–30.26% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, X.; Zhao, D.; Zhang, Y.; Chen, Y.; Gao, Z.; Zhang, X.; Wang, S. Fluid–Structure Interaction Study in Unconventional Energy Horizontal Wells Driven by Recursive Algorithm and MPS Method. Appl. Sci. 2025, 15, 6743. https://doi.org/10.3390/app15126743
Gao X, Zhao D, Zhang Y, Chen Y, Gao Z, Zhang X, Wang S. Fluid–Structure Interaction Study in Unconventional Energy Horizontal Wells Driven by Recursive Algorithm and MPS Method. Applied Sciences. 2025; 15(12):6743. https://doi.org/10.3390/app15126743
Chicago/Turabian StyleGao, Xikun, Dajun Zhao, Yi Zhang, Yong Chen, Zhanzhao Gao, Xiaojiao Zhang, and Shengda Wang. 2025. "Fluid–Structure Interaction Study in Unconventional Energy Horizontal Wells Driven by Recursive Algorithm and MPS Method" Applied Sciences 15, no. 12: 6743. https://doi.org/10.3390/app15126743
APA StyleGao, X., Zhao, D., Zhang, Y., Chen, Y., Gao, Z., Zhang, X., & Wang, S. (2025). Fluid–Structure Interaction Study in Unconventional Energy Horizontal Wells Driven by Recursive Algorithm and MPS Method. Applied Sciences, 15(12), 6743. https://doi.org/10.3390/app15126743