Abstract
The advent of electric and flying vehicles (EnFVs) has brought significant advancements to the transportation industry, offering improved sustainability, reduced congestion, and enhanced mobility. However, the efficient routing of messages in EnFVs presents unique challenges that demand specialized algorithms to address their specific constraints and objectives. This study analyzes several case studies that investigate the effectiveness of genetic algorithms (GAs) in optimizing routing for EnFVs. The major contributions of this research lie in demonstrating the capability of GAs to handle complex optimization problems with multiple objectives, enabling the simultaneous consideration of factors like energy efficiency, travel time, and vehicle utilization. Moreover, GAs offer a flexible and adaptive approach to finding near-optimal solutions in dynamic transportation systems, making them suitable for real-world EnFV networks. While GAs show promise, there are also limitations, such as computational complexity, difficulty in capturing real-world constraints, and potential sub-optimal solutions. Addressing these challenges, the study highlights several future research directions, including the integration of real-time data and dynamic routing updates, hybrid approaches with other optimization techniques, consideration of uncertainty and risk management, scalability for large-scale routing problems, and enhancing energy efficiency and sustainability in routing. By exploring these avenues, researchers can further improve the efficiency and effectiveness of routing algorithms for EnFVs, paving the way for their seamless integration into modern transportation systems.
1. Introduction
The transportation industry has witnessed a remarkable transformation with the advent of electric and flying vehicles (EnFVs), holding the promise of enhanced sustainability, reduced congestion, and improved mobility [1,2,3]. These innovative modes of transportation, exemplified by electric vehicles (EVs) and unmanned aerial vehicles (UAVs), have the potential to revolutionize urban mobility and logistics. However, the effective communication and message routing within these dynamic transportation systems are faced with unique challenges that require specialized solutions [4]. Multi-objective message routing stands as a critical issue of EnFV operations, requiring the simultaneous optimization of different objectives, including travel time minimization, energy consumption reduction, reliability maximization, and environmental sustainability promotion [5,6]. The optimization task becomes even more tedious due to the inherent conflicts among these objectives. Genetic algorithms (GAs) offer a promising avenue to address the multi-objective message routing in EnFVs [7]. Efficient communications in EnFVs are essential, given their substantial influence on the sustainability of futuristic transportation [8]. Embracing electric and energy-efficient solutions not only reduces operational costs but also significantly mitigates the adverse effects of global warming.
In light of these challenges and opportunities, this review paper sets out to provide a comprehensive analysis of the utilization of GAs for multi-objective message routing in EnFVs. By conducting an extensive examination of existing research papers and studies, this paper seeks to outline state-of-the-art approaches and methodologies, identify key challenges, discuss the merits and limitations of GA-based routing strategies, and infer their implications for realizing the efficiency, reliability, and sustainability of message routing in EnFVs. Our novel work targets to answer pivotal questions given below, that roam in the research community regarding the applications of the GA in EnFVs environment. Why is a thorough examination and analysis of the application of GA for multi-objective message routing in EnFVs missing from the literature? What approaches have been employed so far in multi-objective message routing for EnFVs? What are the key challenges and complexities associated with multi-objective message routing within dynamic EnFV systems? What are the benefits and limits of GA-based routing strategies in the context of EnFVs? What are the practical implications of employing GA-based routing on the efficiency, reliability, and sustainability of message routing in EnFVs?
A comprehensive and thorough answer to the questions given above collectively contributes to a comprehensive understanding of the role of genetic algorithms in addressing the multi-objective message routing challenges in electric and flying vehicles, offering insights into their potential benefits and limitations. Moreover, this review paper identifies future research directions and opportunities to enhance the effectiveness of GAs in optimizing message routing for EnFVs. By providing critical insights into the current state of research and potential areas for improvement, this study aims to contribute to the advancement of efficient and reliable communication within these innovative transportation systems.
1.1. Background and Motivation
In the realm of modern transportation, the landscape is rapidly evolving, presenting a complex challenge for traditional routing methods initially tailored to conventional vehicles. This complexity is particularly evident in emerging transportation systems like EnFVs [9]. Within the spectrum of routing solutions, there is a notable limitation. The majority of existing approaches tend to focus narrowly on a single objective, often at the expense of other critical considerations. However, there is a promising subset of solutions that adopt a rigorous analytical approach. The solutions leverage mathematical calculations to identify optimal routes while simultaneously considering multiple objectives [5]. While this approach demonstrates potential in specific scenarios, it may lack the requisite dynamism and adaptability for real-world applications, occasionally resulting in excessively convoluted routing.
Furthermore, it is important to acknowledge a scarcity of research addressing the domain of multi-objective routing within the context of EnFVs [2]. This research gap underscores the pressing need for innovative and versatile routing strategies tailored to the unique demands of EnFVs. These demands include a wide range of factors, from energy efficiency and real-time adaptability to navigating complex and ever-changing environments. But let us delve deeper. Picture this: EnFVs, electric vehicles (EVs), and flying vehicles (FVs) like drones are revolutionizing transportation. Ensuring efficient message routing in these vehicles is absolutely critical for their seamless operation within dynamic transportation systems. In the realm of EVs, message routing optimization is key. We are talking about keeping the information flow reliable and real-time while considering factors like energy usage, where to find charging stations, and staying within the vehicle’s range [10]. Now, for FVs such as drones and UAVs, it is a whole new ballgame. Message routing algorithms must factor in flight restrictions, airspace regulations, and the ever-changing landscape of obstacles.
The exciting part? When we optimize message routing, we are not just improving a single aspect; we are supercharging the performance and functionality of EnFVs. Think intelligent transportation systems, futuristic package deliveries, and high-tech surveillance operations [3]. We must admit, in the world of high-mobility vehicles with multiple requirements, finding the absolute best route is quite the challenge. But here is the thing: there is often a solution that comes really close to meeting all the requirements and, honestly, beats the competition. After a deep dive into the literature, it is clear that genetic algorithms (GAs) are a popular choice for routing strategies. GAs excel in optimization due to their ability to perform global searches, robustness in complex and noisy environments, and adaptability to various problem types. They do not require derivatives, can be parallelized for efficiency, and balance exploration and exploitation effectively. GAs maintain diverse solution populations, facilitate crossover to produce better solutions, and are heuristic, making them versatile for real-world problems. However, their effectiveness depends on problem characteristics, and the choice of optimization technique should be problem-specific. However, there is a twist—there is surprisingly little literature on their use in EnFVs communications and routing.
1.2. Challenges in Message Routing for EnFVs
The routing of messages in EnFVs presents numerous challenges that need to be addressed to ensure efficient and reliable communication [10,11]. One of the primary challenges is the dynamic nature of these transportation systems. EnFVs operate in dynamic environments characterized by constantly changing traffic conditions, charging station availability, flight restrictions, and environmental factors. Message routing algorithms must be able to adapt in real-time to these dynamic conditions to provide efficient and uninterrupted communication. Another key challenge is the multi-objective nature of message routing in EnFVs. Efficient routing must consider multiple objectives simultaneously, such as minimizing travel time, reducing energy consumption, maximizing reliability, and incorporating environmental sustainability. However, optimizing these objectives simultaneously is a complex task, as they often conflict with each other [12]. Traditional single-objective optimization approaches are inadequate to capture the trade-offs and achieve optimal solutions in these multi-objective scenarios. Furthermore, the integration of genetic algorithms (GAs) offers a promising solution for addressing the multi-objective message routing problem in EnFVs [4]. GAs are evolutionary optimization techniques that mimic the process of natural selection to develop a population of potential solutions. However, the design and parameterization of GAs for message routing optimization requires a careful consideration to ensure effective convergence towards optimal or near-optimal solutions. Additionally, the computational complexities associated with genetic algorithms can pose challenges in terms of scalability and efficiency.
1.3. Objective of the Review Paper
The objective of this review paper is to provide a comprehensive analysis of the application of GAs for multi-objective message routing in EnFVs. By examining existing research papers and studies, our aim is to achieve the following objectives:
- Explore the state-of-the-art approaches and methodologies for multi-objective message routing in EnFVs using GAs.
- Identify the key challenges and considerations in optimizing message routing for these transportation systems.
- Discuss the benefits and limitations of GA-based routing approaches and their impact on the performance and functionality of EnFVs.
- Highlight the implications and potential applications of GAs in improving the efficiency, reliability, and the sustainability of message routing in EnFVs.
- Identify future research directions and opportunities to further enhance the effectiveness of GAs in optimizing message routing in these transportation systems.
By providing a comprehensive overview and analysis, this study contributes to the understanding of multi-objective message routing in EnFVs and provides insights for researchers and practitioners interested in leveraging GAs for efficient and reliable communication within these innovative transportation systems. It provides critical challenges to the message routing of EnFVs and suggests many promising research directions.
The subsequent sections of this paper delve into the multi-objective nature of message routing in EnFVs (Section 2), GAs for multi-objective routing optimization (Section 3), a review of existing studies on routing optimization for EVs and FVs (Section 4 and Section 5), respectively, and a detailed discussion on the benefits and limitations of GA-based routing approaches (Section 6). This paper concludes by summarizing key findings, providing implications for EnFV message routing, and suggesting promising future research directions in this rapidly evolving field (Section 7 and Section 8).
2. Multi-Objective Message Routing in EnFVs
Message routing plays a critical role in facilitating efficient communication and data exchange in transportation systems, including EnFVs [13]. However, traditional routing algorithms often fail to consider the unique characteristics and requirements of these emerging modes of transportation [12]. EVs require a careful consideration of energy consumption, charging station availability, and range limitations, while flying vehicles such as drones need to navigate airspace regulations, flight restrictions, and congestion. Therefore, there is a need for specialized routing approaches that address the specific objectives and constraints of these vehicles.
In recent years, researchers have explored the application of multi-objective optimization techniques to address the challenges of message routing in EnFVs. Multi-objective optimization aims to find a set of solutions that simultaneously optimize multiple objectives, considering trade-offs between them [14]. GAs are inspired by the process of natural selection and evolution [15]. They operate on a population of potential solutions, represented by chromosomes, and iteratively improve them through selection, crossover, and mutation operations. By applying these genetic operators, the algorithm explores the solution space, considering different combinations of objectives and constraints. The use of GAs in multi-objective message routing for EnFVs has been investigated in several studies. For example, Alolaiwy and Zohdy [16] proposed a GA-based approach that optimized message routing for EVs, considering objectives such as considers reliability, data rate, and residual energy as routing metrics. Their results demonstrated significant improvements of up to 90% in packet delivery rate using New York City traffic trace.
In the context of FVs, Wei et al. [6] applied a GA to optimize message routing for flying ad hoc networks (FANETs). Their approach focuses on improving the routing in FANETs to enhance network performance and lifetime. They proposed the GA-based routing (GAR) protocol, which considers factors like stability, link bandwidth, and node energy. By utilizing a GA approach, GAR quickly identifies optimized routes, resulting in improved network performance. The simulation results show that GAR enhances route stability, thereby improving overall network performance and increasing network availability. However, the paper acknowledges the need to incorporate energy consumption in future research to develop energy-efficient routing strategies. Overall, the GAR protocol offers a promising solution for enhancing routing in FANETs, with potential implications for network sustainability and efficiency. This study highlighted the effectiveness of GAs in addressing the multi-objective nature of message routing for EnFVs. By considering multiple objectives and constraints simultaneously, GAs can generate a set of solutions that represent trade-offs between different optimization goals. These solutions offer decision-makers a range of routing options that cater to various objectives, such as minimizing energy consumption, maximizing efficiency, and adhering to operational constraints.
In conclusion, multi-objective message routing in EnFVs requires specialized approaches that consider the unique characteristics and objectives of these modes of transportation.
2.1. Objectives and Constraints in Routing Optimization
Routing optimization in the context of EnFVs involves the determination of efficient and optimal routes for message transmission, considering various objectives and constraints [17,18]. The objectives in multi-objective message routing optimization typically include minimizing message delivery time, maximizing network throughput, reducing energy consumption, and ensuring reliable communication. These objectives are crucial for enhancing the overall performance and efficiency of the transportation system described below.
Message delivery time is a primary objective in routing optimization. For EVs, minimizing the message delivery time is essential for timely coordination, ensuring efficient charging, and enabling effective vehicle-to-grid communication. In the case of flying vehicles, timely message delivery is crucial for maintaining situational awareness, enabling efficient air traffic control, and supporting safe operations [1]. Maximizing network throughput is another key objective in routing optimization. High network throughput ensures the efficient utilization of communication resources and facilitates the exchange of messages among vehicles. This objective is particularly relevant in scenarios where a large number of vehicles are present, such as in urban environments or during peak travel periods [19]. Reducing energy consumption is a critical objective for EnFVs. In the case of EVs, minimizing energy consumption during message routing helps extend the vehicle’s driving range and optimize battery usage. For flying vehicles, energy efficiency is vital for increasing flight endurance and reducing the need for frequent refueling or recharging [20]. Furthermore, the routing optimization process must consider various constraints that arise in the context of EnFVs. These constraints may include the availability and location of charging stations for EVs, flight restrictions and airspace regulations for flying vehicles, road or airspace congestion, and real-time traffic conditions. Incorporating these constraints ensures that the generated routes adhere to the specific operational requirements and limitations of the vehicles and the transportation system.
2.2. Traditional Routing Algorithms and Their Limitations
Traditional routing algorithms, such as shortest path algorithms (e.g., Dijkstra’s algorithm) and heuristic-based algorithms (e.g., A* algorithm), have been widely used in transportation systems to find efficient routes based on distance or time [21]. However, these algorithms have limitations when it comes to addressing the specific requirements and complexities of message routing in EnFVs. One major limitation of traditional routing algorithms is their inability to consider the unique characteristics of EVs [22]. EVs have limited range and require access to charging infrastructure to ensure uninterrupted operation. Traditional algorithms do not take into account the availability and proximity of charging stations when calculating routes. Consequently, they may inadvertently direct EVs on routes that exceed their battery capacity or fail to consider the optimal charging locations along the route. In the case of FVs, traditional routing algorithms face similar limitations. FVs, such as drones or UAVs, are subject to flight restrictions, airspace regulations, and safety constraints. Traditional algorithms do not incorporate these factors into their routing decisions, potentially leading to routes that violate airspace regulations or pose safety risks [9]. Moreover, traditional routing algorithms typically optimize for a single objective, such as minimizing the distance or travel time. In the context of EnFVs, multiple objectives need to be considered simultaneously. For example, routing decisions should not only focus on minimizing energy consumption but also on factors such as traffic congestion, vehicle load balancing, and environmental impact. Traditional algorithms lack the capability to handle multi-objective optimization, leading to suboptimal or impractical routing solutions.
2.3. Importance of Multi-Objective Optimization in EnFVs
There is a critical need to develop routing algorithms that can effectively optimize message routing in these dynamic transportation systems and address the limitations of traditional routing algorithms [18]. Multi-objective optimization is highly important in the context of EnFVs due to several key reasons [10,14,23]:
- Conflicting objectives: EnFVs face multiple conflicting objectives that need to be optimized simultaneously. These objectives may include maximizing energy efficiency, minimizing travel time, reducing emissions, optimizing battery usage, ensuring passenger comfort, and considering safety and regulatory constraints. Multi-objective optimization allows for balancing and trade-off analysis among these objectives to find the most desirable solutions.
- Complex and dynamic environment: EnFVs operate in complex and dynamic environments, such as urban areas with varying traffic conditions, weather patterns, and the availability of charging or refueling infrastructure. Multi-objective optimization techniques enable the vehicles to adapt to these changing conditions and make informed decisions to optimize performance based on multiple objectives.
- Resource constraints: EnFVs often have limited resources, such as battery capacity or fuel availability. Multi-objective optimization helps in finding optimal solutions that make efficient use of these resources by considering multiple objectives simultaneously. It allows for better resource allocation and utilization, thereby extending the range and overall performance of EnFVs.
- User preferences and stakeholder considerations: Different stakeholders, including vehicle owners, operators, passengers, and regulatory bodies, may have diverse preferences and requirements. Multi-objective optimization provides a systematic approach to incorporate these preferences and consider the needs of various stakeholders while optimizing the vehicle’s performance. It allows for the generation of a set of Pareto-optimal solutions, offering a range of choices that can cater to different user preferences and stakeholder considerations.
- Innovation and future development: Multi-objective optimization serves as a catalyst for innovation and the development of advanced EnFV technologies. By exploring various trade-offs and finding optimal solutions, it encourages the integration of cutting-edge technologies, such as advanced energy management systems, intelligent routing algorithms, and vehicle-to-vehicle communication, to achieve the best possible performance across multiple objectives. This drives the progress and advancement of EnFV technologies for a sustainable and efficient transportation system.
In summary, multi-objective optimization is crucial in the context of electric and flying vehicles as it enables the vehicles to address conflicting objectives, adapt to dynamic environments, optimize resource usage, consider user preferences and stakeholder considerations, and drive innovation for future development. It plays a vital role in achieving optimal performance and advancing the sustainability of EnFVs in the transportation sector.
3. GAs for Multi-Objective Routing Optimization
To address the multi-objective routing optimization problem in the context of EnFVs, GAs have emerged as a powerful optimization technique. GAs are inspired by the process of natural selection and evolution, and they have been widely applied to various optimization problems, including routing optimization. The main advantage of using GAs is their ability to efficiently search and explore the solution space, considering multiple conflicting objectives simultaneously [10].
Multi-objective optimization (MOO) is a mathematical framework used to solve complex decision-making problems where multiple conflicting objectives need to be simultaneously optimized. In MOO, the goal is to find a set of solutions that represent a trade-off between these conflicting objectives, rather than a single optimal solution. Mathematically, a multi-objective optimization problem can be defined as follows:
Let us consider an optimization problem with m objectives, represented as , , …, , where x is a vector of decision variables.
Minimize (or maximize) the objectives: For minimization, the general form of a multi-objective optimization problem can be expressed as:
Minimize:
Subject to constraints:
Here, the objective functions represent the quantities to be minimized, and the constraints and represent inequalities and equalities, respectively. These constraints define the feasible region for decision variables x.
For maximization, you would replace “Minimize” with “Maximize” in the problem statement. The key challenge in MOO is finding a set of solutions that represent trade-offs among the conflicting objectives. The GA has the potential to choose the best dominant solution out of solution space. The foundation of a GA lies in its key components, including the representation and encoding of routes, the fitness evaluation and objective functions, the selection, crossover, and mutation operators, as well as the concept of Pareto dominance and non-dominated sorting [14], explained in following subsections.
3.1. Fundamentals of GAs
GAs, inspired by natural selection and genetics [4], offer a powerful optimization technique for addressing complex problems with multiple objectives, including message routing optimization in EnFVs. The core principle of GAs involves iteratively improving a population of potential solutions to discover optimal or near-optimal outcomes.
The key components of a GA encompass solution representation and encoding, fitness evaluation, selection, crossover, and mutation operators, as illustrated in Figure 1 [24]. These components collectively drive the search process towards the optimal solution space.
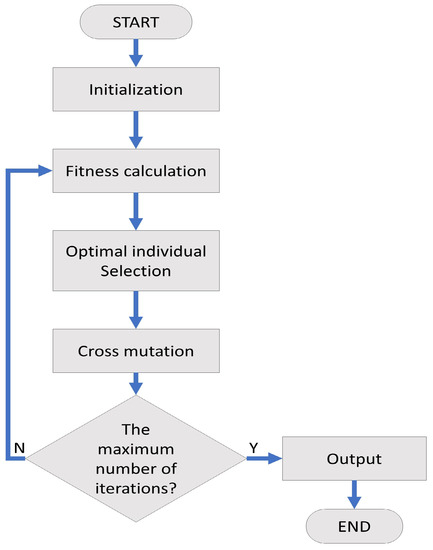
Figure 1.
GA Process.
Solution representation and encoding are vital in GAs, especially in message routing optimization for EnFVs. Routes need to be represented in formats that capture essential problem characteristics [25]. Fitness evaluation plays a crucial role in GAs, as it assesses the quality of potential solutions based on defined objectives. In message routing optimization, the fitness function evaluates routes in terms of multiple objectives, such as minimizing travel time, reducing energy consumption, and adhering to EnFV-specific constraints [19]. The function assigns a numerical value to each solution, indicating its suitability or fitness for the problem. Selection involves choosing the fittest individuals from the current population for reproduction, akin to the principle of survival of the fittest in natural selection [26]. Various selection strategies, such as tournament selection, roulette wheel selection, or rank-based selection, ensure diversity and balance exploration and the exploitation of the solution space. Crossover, inspired by genetic recombination in natural reproduction, combines genetic information from two parent solutions to generate offspring. In message routing optimization, crossover exchanges genetic material between the routes of two parents, creating new potential routes for the next generation. Mutation introduces random changes in the genetic material of solutions, exploring new regions of the solution space. It is crucial in maintaining diversity and preventing premature convergence to suboptimal solutions [14]. In message routing optimization, mutation involves altering the specific nodes or components of a route, enabling the exploration of alternative routes.
The next generation of solutions is determined through selection, crossover, and mutation operators, creating a new population of potential solutions. This iterative process continues until a termination criterion is met, such as reaching a maximum number of generations or achieving a satisfactory level of fitness.
3.2. Representation and Encoding of Routes
The representation and encoding of routes are crucial aspects of GAs for multi-objective message routing in EnFVs. The chosen representation directly impacts the algorithm’s ability to explore diverse solutions within the search space. In message routing, efficient encoding is necessary to capture the sequence of waypoints, charging stations, and flight paths [27,28].
One commonly used representation is the chromosome-based approach, where each chromosome corresponds to a potential route. The chromosomes consist of a sequence of genes, with each gene representing a specific waypoint or charging station. The order of genes in the chromosome determines the sequence in which waypoints or charging stations are visited. For EVs, route encoding may include additional information like energy consumption and charging requirements. The chromosome can be expanded to include genes representing energy levels at each charging station or remaining battery capacity at waypoints. For FVs, encoding may incorporate flight restrictions, altitude limits, and airspace regulations. The genes within the chromosome can be expanded to include information related to flight paths, altitude ranges, and any specific requirements for each waypoint. The encoding scheme should balance representational capacity and computational complexity, allowing the exploration of diverse routes while ensuring feasible and efficient solutions. Various encoding schemes, such as binary encoding, permutation encoding, or integer encoding, can be explored based on specific routing problem requirements.
Commonly used encoding schemes include binary encoding, suitable for discrete decision spaces; integer encoding, appropriate for finite options; permutation encoding, for cases where the order matters; real-valued encoding, enabling continuous representation; tree-based encoding, offering flexibility for complex relationships; and composite encoding, combining multiple schemes for tailored representation. The choice of encoding depends on the problem, decision variables, and objectives of the multi-objective GA. It is crucial to select an encoding scheme that effectively represents the problem domain, which facilitates exploration of the solution space, and enables accurate fitness evaluation during the optimization process.
3.3. Fitness Evaluation and Objective Functions
In multi-objective message routing for EnFVs, fitness evaluation is essential for assessing the quality of each solution or chromosome within the GA. It involves quantifying the performance of a solution based on the multiple objectives and constraints of the routing problem. Objective functions are used to measure the satisfaction level for each objective, enabling the comparison and selection of better solutions [29].
The objective functions in multi-objective routing optimization for EnFVs consider various factors such as energy consumption, travel time, distance, congestion, charging station availability, flight restrictions, and environmental impact. These objectives represent the diverse requirements of the vehicles and the transportation system, aiming to optimize trade-offs between conflicting goals. The design of objective functions should be specific to the transportation system’s characteristics and the routing problem’s objectives. These functions need careful crafting to strike a balance between conflicting objectives and align with desired system performance.
3.4. Selection, Crossover, and Mutation Operators
The selection, crossover, and mutation operators are crucial components of the GA-based optimization framework for multi-objective message routing in EnFVs. These operators facilitate the exploration and exploitation of the solution space, leading the algorithm towards optimal or near-optimal solutions [29]. The selection operator is responsible for choosing the fittest individuals from the current population to create the next generation. Various strategies, such as tournament selection and rank-based selection, assign higher probabilities to individuals with better fitness values, promoting the propagation of superior solutions. The crossover operator combines genetic information from two parent individuals to create offspring, mimicking the process of sexual reproduction. Different crossover techniques, like one-point crossover, enable the effective recombination of genetic material and the generation of diverse solutions [7]. The mutation operator introduces random changes in the genetic material of individuals to maintain diversity and explore new regions of the solution space [30]. Commonly used approaches like bit-flip mutation allow the fine-tuning of solutions and prevent convergence to local optima. These operators work together to enable the GA to explore, maintain diversity, and converge towards optimal or near-optimal solutions in multi-objective message routing for EnFVs.
3.5. Pareto Dominance and Non-Dominated Sorting
In multi-objective optimization for EnFVs, Pareto dominance is a fundamental concept used to evaluate and compare different solutions [14]. A solution is considered superior to another if it performs better in at least one objective without sacrificing performance in any other objective. This concept allows for the identification of trade-offs between conflicting objectives and helps in finding optimal solutions.
Non-dominated sorting is the process of categorizing solutions based on Pareto dominance as depicted in Figure 2. This involves dividing the population into different fronts, where each front contains solutions that are not dominated by any other solution. Non-dominated sorting helps identify the Pareto-optimal solutions, which cannot be improved in any objective without worsening another objective.
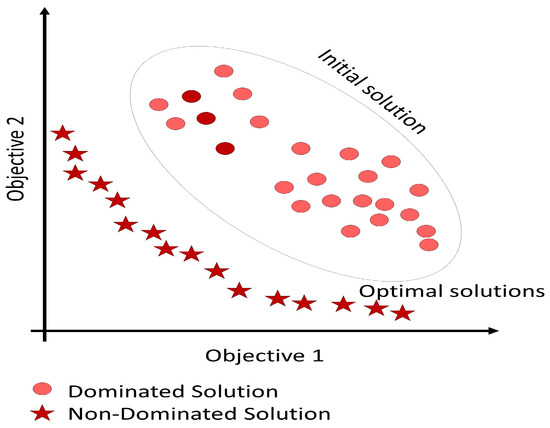
Figure 2.
Pareto Front-Multi-Objective Solutions.
Non-dominated sorting is crucial in GA-based approaches for multi-objective message routing in EnFVs. It enables the selection of promising solutions for the next generation, allowing the GA to converge towards the Pareto-optimal front. By exploring trade-offs between objectives, non-dominated sorting aids decision making and helps stakeholders make informed choices based on their preferences. To improve efficiency and performance, researchers have proposed various variations and enhancements to non-dominated sorting, including adaptive methods, elitism strategies, and diversity preservation techniques. Continuous research aims to develop novel algorithms to address challenges posed by large-scale optimization problems in multi-objective message routing for EnFVs.
3.6. GA Parameters and Tuning
GAs rely on various parameters that significantly influence their performance and convergence to optimal or near-optimal solutions. The proper tuning of these parameters is essential to strike a balance between exploring and exploiting the solution space [6]. The commonly tuned parameters include population size, crossover rate, mutation rate, and termination criteria. The population size determines the number of individuals (routes) in each GA generation. A larger population size allows for the greater exploration of the solution space but increases computational complexity. On the other hand, a smaller population size may lead to premature convergence and suboptimal solutions. The choice of population size should consider the problem complexity and available computational resources. The crossover rate represents the probability of performing a crossover operation between two parent routes to generate offspring [31]. A higher crossover rate promotes the exploration and diversification of the solution space. However, an excessively high crossover rate may result in the loss of good solutions, while a lower rate may slow down convergence. The selection of the crossover rate should consider the problem characteristics and the desired trade-off between exploration and exploitation. The mutation rate determines the probability of introducing random changes in the genes (locations) of an individual route [29]. Mutation helps maintain diversity and allows for the exploration of new regions in the solution space. A higher mutation rate encourages exploration but may slow down convergence, while a lower rate risks premature convergence to local optima. The choice of the mutation rate should balance the exploration–exploitation trade-off, considering the problem’s complexity. The termination criteria define the conditions for stopping the GA’s execution. Common termination criteria include reaching a maximum number of generations, achieving a satisfactory fitness level, or reaching a predefined computational time limit. The choice of termination criteria should consider the problem’s characteristics, available computational resources, and optimization goals.
Proper parameter tuning is essential to achieve the best performance of the GA for multi-objective message routing in EnFVs. It requires a thorough experimentation and analysis to strike the right balance between exploration and exploitation, considering the problem’s complexity, available computational resources, and optimization objectives.
4. Review of Case Studies: Electric Vehicle Routing Optimization
Numerous case studies have been carried out to explore the efficiency of GAs in optimizing routing for EVs. The distribution of these studies considered in this work over the years is depicted in Figure 3.
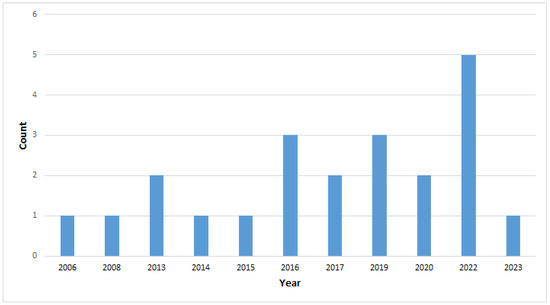
Figure 3.
Distribution of GA-based EV routing optimization studies.
One notable study by Rajesh et al. [30] addressed the personal electric vehicle routing problem (pEVRP) with the objective of optimizing the travel time and recharging costs for a single electric vehicle. They aim to minimize travel time and charging process as objective function, represented by Equation (4). The first three terms of Equation (4) denote the time taken to reach the destination node D from the source node S and the next three terms are associated with the charging process.
Real-life factors such as traffic delays, detour distances, and variable pricing were incorporated into the problem formulation. The study formulated a mixed-integer nonlinear programming (MINLP) problem and employed the -constraint method to obtain a set of non-dominated points representing the first Pareto front. Meta-heuristic techniques, including GA and PSO, were applied to find globally optimal solutions. The results demonstrated that the proposed methods effectively optimized travel time and recharging costs, providing valuable insights into decision-making in personal electric vehicle routing. Similarly, Alinaghian and Zamani [22] addressed the IRP with a focus on optimizing fuel consumption and pollutant emissions in the transportation sector. They used comprehensive modal emission model (CMEM) for computing fuel consumption rate and greenhouse gas emission based on vehicle speed, load weight and road gradient. They computed fuel consumption using Equation (5).
where is the mass rates of fuel to the air. is the vehicle type h engine friction. is engine speed, and is engine displacement vehicle type h. and k are constant values and the diesel engine efficiency parameter and thermal value of diesel fuel, respectively. is momentary engine power output vehicle type h (in kW). A bi-objective model is proposed, considering fleet composition as heterogeneous to enhance practicality. The proposed model is solved using a multi-objective quantum algorithm, and its performance is compared to other methods like NSGA-II and exact methods. The results demonstrated the superior performance of the proposed algorithm in terms of defined criteria. The paper concluded by suggesting future research directions, including the incorporation of additional concepts and policies, fuel consumption models, and solution methods to further enhance the model’s scope and effectiveness in addressing inventory routing optimization, fuel consumption, and environmental sustainability.
In another study, Liu et al. [32] focused on optimizing the navigation system for EVs considering both charging and routing aspects. Their study addressed the challenges posed by the introduction of a real-time pricing (RTP) policy, which aimed to manage load shaving during fast charging. The proposed approach extended the original traffic network to a feasible state graph using EV arrival states and traffic parameters. An improved chrono-SPT (ICS) algorithm is introduced to determine the optimal decision sequence for routing and charging policies. To simplify the computational complexity, a simplify–charge–control (SCC) algorithm is presented. Simulation results demonstrated the effectiveness of both the ICS and SCC algorithms, with the SCC algorithm significantly reducing the computation complexity while maintaining an acceptable level of deviation from the optimal cost.
Ombuki et al. [33] proposed a novel approach to solving the VRP with time windows (VRPTW) by treating it as a multi-objective optimization problem (MOP) using a GA with Pareto ranking. Unlike previous approaches that biased the optimization towards minimizing the number of vehicles, this MOP formulation considered the number of vehicles and the total distance traveled as separate dimensions in the search space. This avoided introducing search bias and allows for a more comprehensive exploration of the solution space. The proposed approach recognized the inherent nature of the VRPTW as a MOP and provides a computationally advantageous solution. Experimental results demonstrated the competitiveness of the approach compared to existing methods, highlighting the effectiveness of the MOP formulation in capturing alternative solutions that prioritize different objectives. By adopting the MOP framework, the authors addressed the philosophical and theoretical aspects of the VRPTW, acknowledging that there are multiple trade-offs between minimizing the number of vehicles and minimizing the total distance traveled. The proposed approach does not prioritize one objective over the other but allows for the generation of a set of solutions that represent different trade-offs between the two objectives. This MOP formulation provides flexibility for decision makers to select solutions based on their specific priorities and constraints. The computational advantages of the approach are also highlighted, as the performance and results obtained using the GA with Pareto ranking are competitive with existing methods.
Another study by Liu et al. [7] also focused on the electric vehicle routing problem with time windows (EVRPTW) in the context of logistics transportation. The study takes into account the terrain grades of roads, which impact the travel process of EVs, and the battery state-of-charge (SoC) dynamics are used to model the EVs’ electricity consumption. The objective is to minimize the total electricity consumption while efficiently serving a set of customers with specific time windows. The problem is formulated as a mixed-integer programming model, and a hybrid GA that combines the 2-opt algorithm with GA is developed to address the EVRPTW. Simulation results demonstrated that the proposed approach outperforms the simulated annealing (SA) algorithm and GA in terms of finding better solutions within a shorter computation time. The research contributes to optimizing EV routing and energy consumption in logistics transportation, taking into account real-world factors such as terrain grades and battery dynamics. However, Syafrizal and Sugiharti [34] addressed the EV routing problem with time windows (E-VRPTW) and proposed an improvement by incorporating Fuzzy Logic using the GA and Tabu Search (TS) methods. They determined the value of fitness of the current population based on four indicators, , , , and as per Equation (6).
The addition of fuzzy logic introduced tolerance in the time windows, allowing for flexibility in arrival times. The experimental results show that the proposed E-VRPFTW model with GA-TS and fuzzy logic achieves higher fitness values compared to the E-VRPTW model without fuzzy logic. The fitness values increase by an average of 14.39% in the first trial and 8.49% in the second trial. Furthermore, when considering the number of vehicles and distance, the GA-TS method combined with fuzzy logic yields better results, with a shorter mileage and a smaller number of vehicles, indicating the effectiveness of this approach in optimizing the E-VRPTW problem. They concluded that the integration of fuzzy logic and the GA-TS approach enhances the E-VRPTW by providing more optimal routes. The utilization of fuzzy logic in time windows introduces flexibility in arrival times, leading to improved fitness values. The comparison of results with other studies confirms the effectiveness of the GA-TS method and fuzzy logic, resulting in shorter distances traveled and a reduced number of required vehicles.
Akbara and Aurachman [35] focused on optimizing the capacitated vehicle routing problem with time windows (CVRPTW) for a mineral water company distributor. The study utilized GA, Tabu Search Algorithm (TS), and a hybrid approach combining both algorithms. The objective is to reduce the total distance traveled and determine the optimal number of homogeneous fleet vehicles. The results show that the hybrid GA-Tabu Search approach yields the best solution, reducing the existing route’s total distance by 15.99%. The travel distances achieved were 932.47 km for GA, 982.96 km for TS, and 789.67 km for the hybrid algorithm. This study suggested considering customer time windows and evaluating the impact on transportation costs for future research. Additionally, visualizing the results can aid in route determination and further enhance the optimization process. Similarly, Mohammed et al. [36] focused on optimizing the shuttle bus services at UNITEN by implementing the capacitated vehicle routing problem (CVRP) model. This study utilized a GA as a metaheuristic approach to improve transportation efficiency and reduce costs. The GA is effective in solving complex computational problems, such as VRP, and has successfully achieved the study goals by minimizing distances and improving route planning. However, the limitations of the algorithm are identified, including the simplicity of the research problem with a single variable (distance) and a limited number of bus stops. The lack of alternative physical roads and the constraint of passing through all predetermined locations present challenges in finding shorter routes. The study suggested future work to expand the algorithm’s domain to include more diverse locations, which would showcase its strength and performance in handling complex scenarios. The authors concluded that the implementation of the CVRP model using a GA has proven beneficial in optimizing shuttle bus services, reducing transportation costs, and improving efficiency at UNITEN. However, Agrawal et al. [37] addressed the problem of distributing perishable goods with quality constraints using a heterogeneous fleet of vehicles. A mathematical programming model is proposed to optimize the distribution process, considering factors such as time windows and deterioration rates. The model proved effective in handling perishable products with short shelf lives. A GA-based heuristic is introduced to efficiently determine optimal routes. The results from the proposed model aligned with expectations, requiring more vehicles as constraints on quality and time become more stringent. The heuristic provided computationally efficient solutions with minimal loss in solution quality. The authors stated that future research could explore incorporating traffic congestion, demand variability, and the distribution of multiple items, as well as addressing pickup operations in addition to drop-off operations at retail stores.
Goel and Gruhn [38] proposed a general vehicle routing problem (GVRP) model that addresses various complexities encountered in real-life applications. Their model incorporates time window restrictions, a heterogeneous fleet with diverse travel times, costs, and capacities, order-to-vehicle compatibility constraints, orders with multiple services and pickup/delivery locations, distinct starting and ending locations for each vehicle, route restrictions, and limitations on drivers’ working hours. To solve this problem, they proposed an iterative improvement approach that modifies the neighborhood structure during the search process. Computational experiments demonstrated the effectiveness of their method, as it successfully handled multiple vehicles and transportation requests.
Many authors also integrated few conventional methods. For example, Sadouni [39] proposed an original heuristic algorithm based on Tabu search to address the hybrid vehicle routing problem (HVRP) with time window constraints and nonlinear penalized delays. Their objective function considered a weighted sum of the vehicle cost, total distance traveled, and a penalty cost for delays. Mendez et al. [40] formulated the HVRP with time window constraints and multiple vehicle visits to the pickup and delivery nodes as a mixed-integer linear programming (MILP) model. They utilized a branch and cut algorithm-based commercial software package to obtain optimal vehicle routes. Penna et al. [41] introduced an iterated local search (ILS) metaheuristic using a variable neighborhood descent procedure to find optimal solutions for various HVRP variants with different numbers of customers and fleet sizes. Kritikos and Ioannou [42] addressed a novel variant of HVRP, considering permissible overloads and a penalty cost for overloads below a predefined limit. They proposed a sequential insertion-based heuristic and evaluated it on Solomon’s benchmark datasets [43]. Mungwattana et al. [44] conducted a practical case study of a third-party logistics firm in Thailand and modeled an HVRP with time windows, multi-product deliveries, and limited vehicle and driver availability. They employed GA and branch and bound approaches to find optimal solutions. Cheng et al. [45] introduced a greenIRP with a heterogeneous fleet and developed a mixed-integer linear programming model to minimize the total cost, including load-dependent fuel consumption and emission costs. Numerical tests were performed to evaluate the effectiveness of their comprehensive study.
Cai et al. [46] focused on solving the multi-objective vehicle routing problem (VRP) with simultaneous pick-up and delivery and time window constraints (Mo-EVRPSDPTW). This study proposed a mathematical model that aims to minimize total logistics cost and maximize average customer satisfaction. To address challenges such as traffic congestion and dynamic power consumption, a multi-objective GA (NSGA-II) with improved strategies is developed. The experimental results demonstrated the effectiveness of the improved NSGA-II algorithm in reducing logistics costs while maintaining high customer satisfaction levels. The algorithm generated more reasonable vehicle service routes, meeting customer needs and optimizing the distribution process. Sensitivity analysis on traffic congestion confirms the stability and effectiveness of the algorithm. The authors stated that future research directions include considering nonlinear charging and queuing time in the charging process to account for real-world conditions. Additionally, incorporating clustering algorithms to enhance the multi-objective evolutionary algorithm’s performance is suggested. Xiao et al. [47] investigated the electric VRP with time windows (EVRPTW) and its implications for incorporating EVs into fleet operations. The study focused on the energy consumption rate of EVs and develops a mixed-integer linear programming (MILP) model called EVRPTW-ECR to dynamically estimate the EV’s maximum range based on speed and load. The model used two linearization methods to handle the nonlinear relationship between speed and travel time. Computational experiments demonstrated that the MILP model can be optimally solved for instances with up to 25 customers using the CPLEX solver and partially optimized for larger instances using a heuristic approach. The research highlighted the importance of considering EV characteristics and energy consumption in route planning to support greener transportation.
Shen et al. [48] addressed the electric VRP with time windows (EVRPTW) by considering uncertain customer demand and weight-related energy consumption of EVs. A robust optimization model based on a route-related uncertain set is proposed, and an adaptive large neighborhood search heuristic is developed to solve the problem. The effectiveness of the method is verified through experiments, highlighting the importance of considering uncertainty and energy consumption in EVRPTW for practical and efficient distribution tasks. Goeke and Schneider [49] presented the electric VRP with time windows and mixed fleet (E-VRPTWMF), which focuses on optimizing the routing of a combination of electric commercial vehicles (ECVs) and conventional internal combustion commercial vehicles (ICCVs). This study incorporated a realistic energy consumption model that considers factors such as speed, gradient, and cargo load distribution, which are crucial for ECVs due to their limited driving range and recharging requirements. An adaptive large neighborhood search algorithm, combined with local search, is developed to solve the problem efficiently. The paper conducted numerical studies on new test instances to analyze the impact of load distribution on solution quality and structure. It also explores different objective functions and evaluates the contribution of ECVs to overall routing costs. The benchmark instances of related problems are used to demonstrate the algorithm’s performance. Overall, the paper provides insights and solutions for optimizing routing in mixed fleets of ECVs and ICCVs.
A study by Torabi et al. [50] examined the energy optimization for autonomous urban electric buses with regenerative braking using GA, specifically addressing the challenge of extending the range of these buses on a single battery charge. This study is conducted within the Sohjoa Baltic project, which aims to improve public transportation through the use of autonomous electric minibuses in various Baltic Sea region cities. The authors introduced an extension of the speed profile optimization (SPO) framework to the context of urban electric minibuses with regenerative braking. The SPO methodology is employed to optimize the speed profiles of the buses, taking into account the frequent stops and short distances between them. Basso et al. [51] presented the two-stage electric VRP (2sEVRP), which addresses the challenge of accurately predicting energy consumption and planning charging stops for fleets of electric commercial vehicles. The proposed approach incorporated detailed factors such as topography and speed profiles to estimate energy costs. It utilized a two-stage process to determine optimal paths and routes, considering battery and time-window constraints. The method demonstrated improved accuracy in time and energy estimations compared to existing approaches. Numerical experiments conducted on a road network in Gothenburg, Sweden, validate the effectiveness of the proposed method. The results indicated that the planned routes are feasible in terms of energy demand and include appropriate charging stops when required.
Table 1 provides a summary of the key parameters and contributions of each paper, allowing for a comparative analysis of the problem addressed, objectives, optimization approach, and key contributions of each study.

Table 1.
Comparative analysis of electric vehicle routing optimization papers.
These case studies demonstrate the effectiveness of GAs in optimizing routing for EVs. By considering multiple objectives such as energy consumption, travel time, and customer satisfaction, the GA-based approaches offer promising results in improving route efficiency and sustainability. The integration of real-time data and dynamic constraints further enhances the performance of the routing optimization process for EVs.
To evaluate the efficiency and quality of the GA-based approach for multi-objective message routing in EVs, several performance evaluation metrics have been utilized in previous studies. These metrics offer valuable insights into the routing solutions achieved by the GA in terms of their effectiveness and efficiency. Figure 4 depicts the performance metrics utilized in various studies examined in this research. It is evident that the majority of researchers concentrated on optimizing two key factors: energy consumption and distance traveled. These metrics highlight the significance of enhancing energy efficiency and minimizing the overall distance covered for electric vehicle (EV) routing optimization. By prioritizing these objectives, researchers aim to achieve greener and more sustainable transportation solutions for EVs. However, it is important to note that different studies might consider additional performance metrics to address specific requirements and real-world constraints in their respective EV routing scenarios.
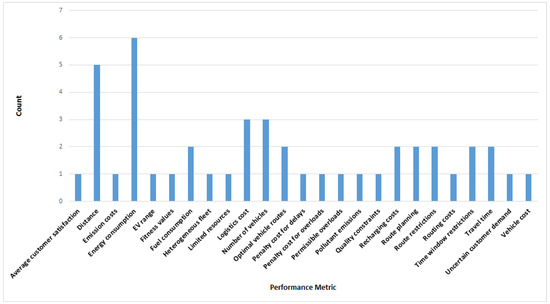
Figure 4.
Performance metric analysis of GA-based EV routing optimization studies.
Table 2 summarizes GA studies for optimizing electric vehicle routing-based applications.
Table 2.
Comparative analysis of GA studies for optimizing electric vehicle routing-based applications.
Table 2 presents a critical summary of various studies addressing GA-based optimization techniques for electric VRPs. The studies cover a range of application domains such as personal EV routing [30], inventory routing [22], EV navigation, and the distribution of perishable goods [37], among others. Multiple optimization techniques, including GAs, metaheuristic algorithms, and mathematical programming models, are employed to solve these problems. Overall, the studies demonstrate the effectiveness of the proposed optimization techniques in improving various performance metrics such as travel time, recharging costs, fuel consumption, pollutant emissions, total electricity consumption, logistics cost, and customer satisfaction [38,40]. The results indicate that the optimization approaches provide valuable insights and contribute to decision making in VRPs.
Some studies highlight the importance of incorporating real-life factors such as traffic delays, detour distances, variable pricing, and terrain grades into the optimization models [30,35]. These factors significantly impact the performance of EVs and the energy consumption of the fleet. By considering these factors, the studies demonstrate improved optimization results and better alignment with real-world conditions. Comparatively, the studies utilize different optimization techniques and approaches, each tailored to the specific problem at hand. GAs and metaheuristic algorithms like particle swarm optimization, Tabu search, and adaptive large neighborhood search are frequently employed to efficiently explore the solution space and find optimal or near-optimal solutions. These techniques often outperform traditional methods like exact algorithms in terms of solution quality and computational efficiency [27,45,52]. Furthermore, some studies address multi-objective VRPs, where conflicting objectives such as minimizing the number of vehicles and minimizing the total distance traveled need to be balanced [48,51,53]. The adoption of multi-objective optimization frameworks, such as Pareto ranking and non-dominated sorting, allows for the generation of a set of solutions representing different trade-offs between objectives. This flexibility enables decision makers to select solutions based on specific priorities and constraints, enhancing the practicality and effectiveness of the optimization process. It is worth noting that several studies propose future research directions to further enhance the optimization models and techniques [8,46,49,53]. Suggestions include incorporating additional concepts and policies, considering nonlinear charging and queuing time, integrating clustering algorithms, addressing pickup operations, and exploring dynamic factors like traffic congestion and demand variability. These future directions aim to broaden the scope and applicability of the optimization techniques, making them more robust and adaptable to real-world scenarios.
In conclusion, the comparative analysis of the optimization techniques employed in electric VRPs demonstrates their effectiveness in improving various performance metrics. The studies contribute valuable insights, propose innovative approaches, and provide avenues for further research in optimizing vehicle routing processes, reducing costs, improving efficiency, and promoting sustainable transportation.
5. Review of Case Studies: Flying Vehicle Routing Optimization
Several case studies have been conducted to explore the application of GAs for flying vehicle routing optimization. These studies aim to address the unique challenges associated with routing UAVs or drones, considering factors such as airspace regulations, battery limitations, and varying mission objectives. The distribution of these studies considered in this work over the years is depicted in Figure 5.
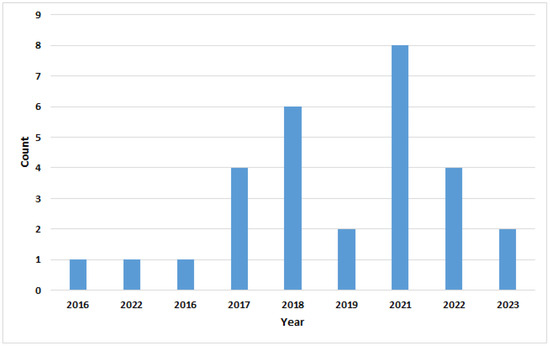
Figure 5.
Distribution of GA-based FV routing optimization studies.
One notable case study by Wei et al. [6] proposes a GA-based routing (GAR) protocol for flying ad hoc networks (FANETs) that addresses the challenges of high node mobility. The protocol improved routing by considering factors such as link stability, link bandwidth, and node energy. The selection, crossover, and variation operators of the GA are enhanced to optimize route planning. Experimental results demonstrated that GAR significantly improves the network throughput, reduces the delay, and enhances the network stability, making it well suited for FANETs. However, the paper acknowledged the need for future research to consider energy consumption in realistic environments. However, Jeauneau et al. [54] introduced two methods for the path planning of UAVs in a real 3D environment. One method was based on the A-Star algorithm and provides real-time path planning capability, while the other method used a GA to generate multiple trajectories based on a Pareto front. Both methods considered the dynamic properties of the UAV and computed 2D trajectories, with the missing dimension being computed using a recursive algorithm. The A-Star method has an average computation time of 836 ms, demonstrating its real-time capability, while the GA method offers performance and flexibility by identifying failures in the tactical situation and providing diverse solutions. The experimental results show that the GA improves the fitness of the A-Star solution by an average of 44.5%. The paper concluded by highlighting the potential of combining these methods to create a fully operational system, and suggests future work to improve the quality of the estimator and explore parallelization techniques.
Dai et al. [55] proposed a quality-aware coverage and path planning scheme for UAV networks in complex environments. They introduced a waypoint generation algorithm to achieve full coverage with satisfactory spatial resolution and an energy-efficient path planning solution for multiple UAVs. Simulation results demonstrated improved coverage and energy consumption compared to traditional techniques. They suggested two future research directions: exploring online adjustment strategies for unpredictable situations and investigating effective communication mechanisms for delivering sensed images to end-users. The proposed framework will be extended to incorporate relay UAV nodes and consider image quality and deadline requirements. A study of Luo et al. [56] presented a study on the integration of wind effects in the optimization of task allocation and path planning for fixed-wing UAVs. Their objective is to minimize the time required for UAVs to complete tasks in the presence of steady wind. The authors proposed a variable-speed Dubins path VRP (VS-DP-VRP) model that incorporates the minimum turning radius of UAVs and calculates the UAV’s ground speed based on the wind speed and airspeed. The model is solved using a GA with customized crossover and mutation operators. The feasibility and effectiveness of the method are demonstrated through an illustrative example, and the sensitivity of the algorithm to different parameters is analyzed. The study concluded that the proposed model and algorithm provide an effective solution for UAV task allocation and path planning under steady wind conditions.
However, Greiff and Robertsson [57] presented a modular approach for generating state trajectories for a miniature UAV while considering computational constraints, obstacle avoidance, and priority assignment. The proposed algorithms included a GA for solving the traveling salesman problem with respect to priorities and obstacle avoidance, a projective algorithm for finding the shortest paths around obstacles, and a quadratic program for generating minimum-snap polynomial trajectories while ensuring the avoidance of static obstacles. These algorithms enabled efficient motion planning in both 2D and 3D environments and have been implemented in real-time scenarios. Chen et al. [58] focused on UAV path planning and proposes two parallel optimization algorithms: the improved GA (IGA) and the particle-swarm-optimization-based ant colony optimization algorithm (PSO-ACO). The goal is to solve the TSP for UAVs and find optimal path planning solutions. The TSP model is established, considering UAVs as traveling salesmen and mission targets as cities. The IGA and PSO-ACO algorithms are applied to solve the TSP model, providing effective and reasonable UAV path planning schemes. Experimental results show that the proposed algorithms outperform a contrast approach and offer more rational and effective solutions for UAV path planning. The study highlighted the importance of UAV path planning for successful UAV missions and contributes to the development of UAV path planning techniques. Bouzid et al. [59] presented a coverage path-planning algorithm for quadrotors in a 2D workspace with obstacle avoidance. The algorithm consists of two steps: the first step uses the RRT*FN algorithm to find optimal paths between points and their neighbors, while the second step connects these points to form the overall shortest path using GAs. The algorithm also addresses energy consumption by providing a scalable solution using the savings technique. A discrete model of the map is generated, and points of interest (POIs) are defined based on this discretized map. The proposed algorithm offers an effective solution for coverage scenarios with obstacle avoidance and energy efficiency. Numerical simulations demonstrate promising results for the algorithm’s effectiveness.
Ferrandez et al. [60] investigated the effectiveness of implementing unmanned aerial delivery vehicles in delivery networks. The focus is on comparing the performance of a truck–drone network with standalone truck or drone delivery systems in terms of overall delivery time and energy consumption. The objectives included examining the time and energy associated with the truck–drone network, proposing an optimization algorithm to determine the optimal number and locations of launch sites, and developing mathematical formulations for estimating the optimal number of launch locations and total delivery time. The algorithm presented in their paper utilized K-means clustering to find optimal launch locations and a GA to solve the truck route as a TSP. The optimal solution is determined by minimizing the cost associated with a parabolic convex cost function. The results show that in tandem delivery efforts outperform standalone systems, and having multiple drones per truck leads to energy and time savings. This paper also provided closed-form mathematical solutions that serve as estimators for the optimal number of launch locations and delivery time. Alinaghian and Zamani [22] focused on the IRP and its relevance in addressing fuel consumption and environmental impact in the transportation sector. They proposed a bi-objective model for IRP that incorporates fuel consumption and pollutant emissions as separate objectives. The model also considers a heterogeneous fleet composition, making it more realistic for real-world applications. The study highlighted the importance of optimizing fuel consumption to improve economic efficiency and mitigate environmental issues related to transportation. The proposed model offered a novel approach to solving IRP and shows promising results compared to other methods. By addressing the challenges associated with the fuel consumption and environmental impact, this study contributed to the field of transportation and logistics.
Sahraeian and Mehraneh [12] addressed the tri-objective two-echelon capacitated vehicle routing problem (2E-CVRP) for distributing perishable products. The objective is to minimize total travel cost, customer waiting times, and carbon dioxide emissions. The proposed model is formulated as a mixed-integer nonlinear programming problem and is transformed into a mixed integer linear programming problem using linearization methods. To solve the problem, they introduced a non-dominated sorting GA (NSGA-II) as a meta-heuristic approach. The algorithm is compared with the Lp-metric method in small-sized problems and with the multi-objective particle swarm optimization (MOPSO) algorithm in medium- and large-sized problems. The results demonstrate the efficiency and effectiveness of the NSGA-II algorithm in finding near-optimal solutions within a reasonable computational time. This study provided valuable insights into the optimization of vehicle routing for perishable products. It highlighted the importance of considering customer satisfaction through reduced waiting times and the reduction in carbon dioxide emissions for environmental sustainability. The comparison of different algorithms provides a benchmark for evaluating the performance of optimization approaches in solving the 2E-CVRP.
Haerani et al. [19] addressed the multiple-depot vehicle distribution routing problem (MDVRP) in the context of perishable product distribution. This research focuses on finding the optimal route using a GA and optimizing parameter values through the use of a fuzzy logic controller (FLC). The objective is to minimize the risk of product spoilage by determining the shortest route for distribution. The combination of GA and FLC enhances the optimization process and improves the efficiency of the distribution system. The findings of the study demonstrated the effectiveness of the proposed approach in optimizing the MDVRP and reducing the risk of product deterioration. Liu et al. [61] introduced a UAV-vehicle joint delivery model for logistics distribution in mountainous cities, addressing the challenges posed by complex terrain and limited UAV capabilities. The model aimed to improve delivery efficiency and reduce the total delivery route length. The proposed approach utilized a three-step route distribution method and employs a GA with end optimization to solve the problem. Simulation results demonstrate the effectiveness of the joint delivery model in solving logistics distribution problems in mountain cities. The future prospects of UAV technology and its potential advancements, such as increased load capacity and flight distance, are also highlighted. This study suggested further research directions, including expanding the joint delivery model to multiple UAVs and vehicles, considering additional factors like weather and signal interference, and exploring the application of the model in different urban areas.
Li et al. [62] focused on the optimization of emergency logistics distribution using a collaborative delivery model with vehicles and UAVs. This study addressed the limitations of UAV-only delivery and proposes a model that considers factors such as start-up costs, waiting costs, and penalty costs. A GA is used to minimize the overall logistics distribution cost, including fixed costs, start-up costs, distribution costs, waiting costs, and penalty costs. The model is compared with other delivery models in a county-level district in Xi’an city, showing significant reductions in total cost compared to the vehicle-alone and UAV-alone models. The vehicle–UAV collaborative delivery model improved the distribution efficiency and customer satisfaction. However, they ignored to explore the impact of road congestion constraints and the scale of vehicles and UAVs on collaborative delivery in emergency situations. Shavarani et al. [63] focused on the economics and logistics of a drone delivery system, specifically addressing the optimization of drone specifications and the configuration of launch and recharge stations. This study proposed a hierarchical facility location model to minimize the total costs of the system, taking into account establishment costs, drone procurement and usage costs. Two metaheuristic algorithms, GA and a hybrid GA, are developed and compared for solving the model. This study also examined the feasibility and profitability of investing in a drone delivery system. The findings provided valuable insights for companies considering establishing an aerial delivery system, addressing logistics, investment feasibility, resource requirements, and demand allocation. This paper suggested future research directions including considering capacitated models, fuzzy programming approaches, congestion models, and environmental sustainability assessments.
Sajid et al. [64] presented a joint-optimization framework for addressing the UAV-routing and UAV-route scheduling problems in UAV-assisted delivery systems. They introduced mixed-integer linear programming models to capture the impact of incidental processes and varying the payload on travel time. To optimize the travel time, a hybrid genetic and simulated annealing (HGSA) algorithm is proposed for UAV-routing. The HGSA algorithm combined GAs and simulated annealing to achieve the optimal global position of customers while avoiding local optima. Additionally, a UAV-oriented MinMin (UO-MinMin) algorithm is introduced for UAV-route scheduling to minimize makespan. The UO-MinMin algorithm employs a UAV-oriented perspective to generate the route-scheduling order efficiently without compromising makespan quality. Extensive Monte Carlo simulations are conducted to evaluate the impact of the hybridization probability of GA and SA in the HGSA algorithm. The performance of the proposed algorithms is assessed using a set of benchmark instances, and they outperformed existing algorithms such as GA, PSO-SA, DE-SA, and HHO. The effectiveness of the UO-MinMin algorithm is demonstrated for various numbers of UAVs, surpassing base algorithms like MCT and OLB. Pehlivanoglu and Pehlivanoglu [65] addressed the problem of constructing a safe and efficient path for autonomous UAVs in target coverage scenarios. Various algorithms, including GA_1, GA_2, GA_3, GA_4, and GA_5, are proposed to overcome challenges such as collisions with terrain surfaces. The algorithms are tested in different 3D environments with rural and urban terrains. The results show that the GA_5 algorithm, which uses cluster centers based on collision points, outperforms the other algorithms by achieving a significant reduction in the required number of cost function evaluations. The convergence histories indicate that GA_4 and GA_3 also perform well. The accuracy of cluster centers plays a crucial role in the success of the Voronoi diagram in GA_3 and GA_4. On the other hand, GA_5 produces more accurate additional waypoints by considering only collision points, resulting in higher confidence levels in the results. Overall, the findings highlight the effectiveness of the proposed GA_5 algorithm in path planning for UAVs, particularly in avoiding collisions with terrain surfaces.
Yuan et al. [27] proposed a coverage path planning method for fixed-wing UAVs based on an improved GA. The algorithm addressed the energy inefficiency issue caused by the conventional scan-type path planning approach. It utilized the good point set algorithm to generate a more uniform primary population and incorporates heuristic crossover and random interval inverse mutation operators to reduce the risk of local optimization. Simulation results demonstrated that the proposed algorithm outperforms the conventional GA in terms of solution quality, particularly with an increasing number of paths. The authors suggested exploring region segmentation algorithms for large areas and extending the coverage path planning to three-dimensional space in future research. Khan et al. [66] explored the use of UAVs for emergency medical aid delivery. Their aim was to develop an algorithm for efficient and safe UAV navigation from a hospital to the location of a medical emergency. Their proposed algorithm focused on optimizing path planning to minimize computational time and transportation costs. Various algorithms, including capacitated vehicle routing problem (CVRP), PSO, ACO, and GA, are compared for vehicle routing. The results demonstrated that the CVRP algorithm outperforms the others, particularly when the vehicle capacity is increased. This indicated that the proposed path planning method has the potential to effectively provide real-time medical aid with improved efficiency. Euchi and Abdeljawed [67] addressed the issue of energy consumption in VRPs by proposing the use of UAVs as a battery-powered delivery method. The emergence of commercial companies like Amazon, Google, and DHL utilizing drones for package delivery has led to the development of a new variant of the VRP known as VRP with drones (VRPD). In VRPD, vehicles and drones are employed to deliver packages to customers either independently or in a dependent manner. An MILP model is presented to describe the problem, and a hybrid GA is proposed to solve the VRPD. Experimental results demonstrated the effectiveness of the proposed algorithm in solving this variant of the VRP. The study highlighted the potential of using UAVs for efficient and environmentally friendly deliveries, providing insights for companies looking to optimize their logistics operations.
Wang et al. [68] addressed the optimization of package delivery using a fleet of drones with different capabilities. The problem is formulated as an extension of the classic VRP and involves scheduling operations in a package depot center. A mixed-integer programming (MIP) model is proposed to minimize the delivery time for a set of packages. To tackle the computational complexity, two GAs, FBGA and RBGA, are developed. RBGA incorporates a rescheduling-based optimization model to adjust drone operations and minimize completion time. Extensive experiments show that the proposed algorithms outperform the MIP approach, particularly for larger problem instances. The findings highlighted the practicality and effectiveness of these methods for real-world implementation in drone-assisted package delivery systems. Changjiang et al. [69] focused on optimizing the delivery paths of UAVs for efficient and automated delivery in the field of e-commerce and urban logistics. The problem is formulated as a multi-objective path planning problem, aiming to minimize the total cost and maximize customer satisfaction. A novel GA based on the non-dominant sorting GA II (NSGA-II) with constraints is proposed. The algorithm represented decision vectors as one-dimensional chromosomes and utilizes specialized variation operators. These design choices, along with the properties of NSGA-II, enable the discovery of a larger number of non-crowding Pareto optimal solutions with reduced computational complexity. A case study on a portion of the Solomon dataset demonstrated the algorithm’s ability to find sparse and well distributed non-dominant solutions within a short time and with a relatively small population size.
Shi et al. [53] addressed the need for the efficient and timely delivery of medical supplies during the COVID-19 pandemic. The use of drones for medical supply delivery offers advantages such as overcoming traffic restrictions and reducing the risk of contact with COVID-19 patients. However, existing optimization models for drone delivery are not suitable for the specific requirements of medical supply delivery during public health emergencies. To address this, the authors proposed a new bi-objective mixed integer programming model for the multi-trip drone location routing problem. This model allows for simultaneous pick-up and delivery, enabling the efficient and timely delivery of medical supplies to the right locations. To solve the model, a modified version of the NSGA-II algorithm is developed. This modified algorithm incorporates double-layer coding to enhance its performance in finding optimal solutions. Multiple sets of data experiments are conducted to evaluate the performance of the proposed model and algorithm. The results demonstrate that the simultaneous pick-up and delivery mode achieves shorter delivery times, improves safety, and saves more resources compared to separate pick-up and delivery modes. Additionally, sensitivity analysis is performed by varying certain parameters, providing valuable insights for the management of medical supply delivery using drones. Overall, the proposed approach shows promising results in meeting the specific requirements of medical supply delivery during public health emergencies.
Kuo et al. [70] examined the feasibility and environmental advantages of using drones for delivery. It introduces the VRP with drones (VRPD) model, which aims to minimize both the delivery route’s makespan and carbon emissions. The model incorporated the collaboration between trucks and drones, where each truck is equipped with a drone to enhance delivery efficiency. The paper presented a mathematical formulation for the VRPD and proposes the use of the NSGA-II to solve it. The algorithm’s performance is evaluated using different-scale problems, and the quality of the solutions is assessed using hypervolume and spacing metrics. The results demonstrated that the algorithm generates high-quality solutions, as indicated by favorable hypervolume and spacing values. Through significance tests, the study confirmed the benefits of using drones in terms of reducing both makespan and carbon emissions. The findings underscore the significant difference achieved by incorporating drones in the delivery process. Hazama et al. [71] focused on the scheduling problem of parcel delivery using drones, where customers need to be assigned to both takeoff points and drones. A GA is proposed as a solution method to efficiently find a near-optimal solution. Experimental results demonstrated that the proposed GA outperforms an integer programming (IP) solver and other GAs in terms of speed and solution quality. The effectiveness of the GA is attributed to its optimized crossover and mutation operations. It is important to note that this study considers a scenario where drones carry only one parcel. The authors ignored the exploration of the problem to drones carrying multiple parcels.
Chiang et al. [72] investigated the environmental and cost-saving implications of using unmanned aerial vehicles (UAVs) for last-mile parcel deliveries. The focus is on analyzing the impact of UAVs on CO2 emissions and cost. A mixed-integer green routing model is proposed to maximize the sustainability benefits of UAV usage. The model considers factors such as energy consumption and carbon emissions. To solve the complex model, a GA is developed. Extensive experiments are conducted to validate the analytical model and the solution algorithm. The results demonstrated that routing and delivering packages with UAVs can lead to energy savings and a reduction in carbon emissions. These findings strongly support the argument that utilizing UAVs for last-mile logistics is not only cost-effective but also environmentally friendly. Khoufi et al. [73] addressed the pickup and delivery optimization problem with a time window and intermittent connectivity network using UAVs. The NSGA-II algorithm was successfully applied, considering UAV-specific constraints like refueling. A novel representation of individuals and associated heuristics and algorithms were introduced to improve the solution generation, crossover, and mutation processes. Experimental results showcased the effectiveness of the NSGA-II approach in achieving high-quality results for the PDPTW-UAV problem, with and without the consideration of refueling constraints. Future work will focus on optimizing refueling management and developing a formula to determine the refueling time based on UAV energy requirements, aiming to further enhance the efficiency and performance of UAV-based pickup and delivery systems.
In a study conducted by Dorling et al. [9], a model for energy consumption in drone delivery was developed. They proposed a cost function that takes into account drone reuse, aiming to identify sub-optimal solutions in real-life scenarios. To optimize the overall cost and delivery time, an MILP formulation was used, and the problem was solved using the simulated annealing (SA) heuristic. The research findings demonstrated that, by optimizing battery weight and promoting drone reuse, significant improvements of over 10% could be achieved compared to scenarios where each drone had an identical battery weight. Xia et al. [52] presented a nonlinear MIP formulation that aimed to optimize homogeneous drone operations by minimizing costs while considering battery wear and disposal effects. To solve this problem, they implemented a tailored branch-and-price algorithm, which demonstrated practical applicability by successfully solving instances with up to 100 customers within the given time limit. In a similar vein, Sawadsitang et al. [74] proposed a three-stage stochastic IP model that accounted for the uncertainty of takeoff and breakdown conditions in the context of minimizing the total delivery costs while adhering to traveling distance limitations. To handle the high complexity of this optimization problem, they adopted an L-shape decomposition method, which enabled an efficient solution computation. Table 3 provides a summary of the key parameters and contributions of each paper, allowing for a comparative analysis of the problem addressed, objectives, optimization approach, and key contributions of each study.
Table 3.
Comparative analysis of flying vehicle routing optimization papers.
These case studies collectively showcase the effectiveness of GAs in addressing the routing optimization challenges specific to flying vehicles. The application of GAs enables the consideration of multiple objectives, constraints, and trade-offs in the optimization process, resulting in improved performance and efficiency in the routing of flying vehicles.
The assessment of the GA-based approach for multi-objective message routing in FVs involves the utilization of various performance evaluation metrics in existing studies. These metrics offer valuable insights into the quality and efficiency of the routing solutions obtained through the GA optimization process. Figure 6 provides a comprehensive overview of the performance metrics employed in the diverse studies analyzed in this research. Notably, the majority of researchers have focused on three fundamental factors: energy consumption, carbon emissions, and routing efficiency. These metrics underscore the paramount importance of enhancing energy efficiency and sustainability while ensuring optimal routing decisions for FVs. By emphasizing these key objectives, researchers aimed to develop environmentally friendly and efficient routing solutions for FVs, which play a critical role in promoting green transportation and mitigating the environmental impact of these advanced aerial vehicles. It is essential to acknowledge that individual studies may incorporate additional metrics based on the specific requirements and complexities of their EnFV routing scenarios.
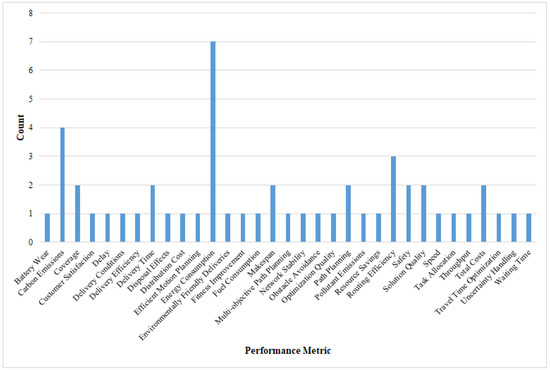
Figure 6.
Performance metric analysis of GA-based FV routing optimization studies.
Table 4 summarizes GA studies for optimizing flying vehicle routing-based applications.
Table 4.
Comparative analysis of GA studies for optimizing flying vehicle routing-based applications.
Based on the provided Table 4, it is evident that the GA-based studies cover a wide range of application domains, including FANETs [6], UAV path planning [54], UAV networks [55], VRPs [56], logistics distribution [58], emergency logistics [59], drone delivery systems [18], and medical supply delivery [71]. This indicates the diverse areas in which GA-based optimization techniques are being applied to enhance efficiency and effectiveness. The optimization techniques employed in these studies vary, with common approaches including GAs, A-Star algorithm, PSO, ACO, and MILP. These techniques are well suited for addressing complex optimization problems and have been adapted and enhanced to tackle specific challenges in each application domain. The results of the studies indicate positive outcomes in terms of improving efficiency, reducing energy consumption, enhancing coverage, optimizing logistics, and achieving better solution quality. Many studies have demonstrated significant improvements compared to existing approaches or highlighted the potential of the proposed methods in real-world scenarios. However, it is important to note that the results may vary depending on the specific conditions and constraints of each application domain. While the studies provide valuable insights and contributions to their respective fields, there are a few limitations and areas for further improvement. Some studies acknowledge the need for future research to consider additional factors or challenges, such as energy consumption in realistic environments, or scalability [9,27,66]. These future research directions can enhance the practicality and applicability of the proposed optimization techniques [53,70].
In terms of optimization techniques, it would be beneficial to explore the use of other metaheuristic algorithms or hybrid approaches to further improve solution quality and computational efficiency. Additionally, several studies focus on single-objective optimization, and future research could consider multi-objective optimization to address conflicting objectives and provide decision-makers with a range of trade-off solutions. Furthermore, while the studies highlight the benefits of using UAVs for delivery and logistics, there is limited discussion on the regulatory, safety, and ethical aspects associated with UAV operations [69,70]. Considering these factors is crucial for the successful integration of UAVs into real-world scenarios. Overall, the studies reviewed provide valuable contributions to their respective domains and demonstrate the effectiveness of optimization techniques in addressing complex problems. However, further research is needed to address the identified limitations and to explore new avenues for optimization in the context of emerging technologies and evolving application domains.
In summary, performance evaluation metrics such as the average travel time, energy consumption, message delivery reliability, and network congestion were utilized to assess the effectiveness of the GA-based approach for multi-objective message routing in EnFVs. The results obtained in various studies demonstrate the capability of GAs to provide efficient and effective routing solutions, improving the travel time, energy consumption, reliability, and overall system performance.
6. Evaluation, Benefits, and Limitations of GA-Based Routing
GA-based routing offers several advantages in the context of routing for EnFVs. Firstly, GAs are highly effective in addressing complex optimization problems with multiple objectives, allowing for the simultaneous consideration of various critical factors.
A comprehensive quantitative performance evaluation of GA-based routing was conducted in [16] for optimizing route selection within the EnFVs paradigm. This evaluation treated energy consumption and transmission rates as a MOO problem, and GA was employed to select the best optimal solution from the Pareto front. The assessment was carried out using real New York City traffic trace data, where it achieved an impressive packet delivery ratio with GA. In contrast, three state-of-the-art solutions yielded packet delivery ratios ranging from to . It is worth noting that the optimal route chosen by GA incurred a slightly longer connection time, approximately 4–5 s, compared to all existing solutions. This outcome is particularly significant considering the high mobility of the flying vehicles involved, which travel at speeds of 10–50 m per second. A connectivity advantage of more than five seconds represents a substantial gain in EnFV routing performance. However, it is crucial to acknowledge that genetic algorithm-based routing comes with its share of limitations and challenges. Notably, the management of trade-offs between multiple objectives demands careful consideration since optimizing one objective may necessitate compromises in others.
In spite of these limitations, genetic algorithms remain an invaluable tool for multi-objective routing in electric and flying vehicle systems. The following sub-sections delve into the benefits, limitations, and trade-offs associated with GA-based routing in more detail.
6.1. Benefits of GAs in Electric and Flying Vehicle Routing
GAs offer several benefits when applied to the optimization of message routing in EnFVs. These advantages stem from the unique characteristics of GAs, such as their ability to handle multi-objective optimization problems and their capacity to explore a wide range of potential solutions [75]. Firstly, GAs excel in handling multiple conflicting objectives in routing optimization for EnFVs [76]. In these complex transportation systems, the objectives may include minimizing travel time, maximizing energy efficiency, considering environmental factors, and ensuring passenger comfort. Traditional routing algorithms often struggle to effectively balance these objectives. However, GAs leverage the concept of Pareto dominance and non-dominated sorting to generate a diverse set of solutions, known as Pareto-optimal solutions. These solutions represent trade-offs between the different objectives, allowing decision makers to choose the most suitable routing strategies based on their preferences and priorities. Moreover, GAs enable the exploration of a large solution space, providing a more comprehensive search for optimal or near-optimal solutions [31]. The use of crossover and mutation operators facilitates the creation of new routes by combining and modifying existing ones, introducing diversity and preventing premature convergence to suboptimal solutions. This feature is particularly advantageous in dynamic transportation environments, where conditions such as traffic congestion, charging station availability, and flight restrictions may change over time. By adaptively updating and refining the routing solutions, genetic algorithms can respond to real-time data and ensure the resilience and efficiency of the routing strategy. Furthermore, GAs offer flexibility in the representation of routes, allowing the incorporation of various constraints and considerations specific to EnFVs [34,77]. For example, the representation can include information about charging station locations, battery capacity, vehicle range, flight restrictions, and other relevant factors. This flexibility allows the optimization process to consider these vehicle-specific requirements, leading to more realistic and effective routing solutions.
6.2. Limitations and Challenges in GA-Based Routing
While GA-based routing offers significant advantages for optimizing message routing in EnFVs, it also comes with certain limitations and challenges that need to be addressed. Understanding these limitations is crucial for researchers and practitioners to develop more robust and effective solutions. One of the primary challenges is the computational complexity associated with GAs [68,78]. As the problem size and the number of objectives increase, the computational time required to find optimal or near-optimal solutions may become prohibitively high. The exploration of the solution space through the population of chromosomes and the application of selection, crossover, and mutation operators necessitate substantial computational resources. Researchers should focus on developing efficient algorithms and parallel computing techniques to mitigate this challenge [1]. Another limitation is the difficulty in determining appropriate parameter settings for the GA. Parameters such as population size, mutation rate, and crossover rate significantly impact the algorithm’s performance and convergence. Identifying the optimal parameter values is a non-trivial task, as they often depend on the specific characteristics of the routing problem and the objectives involved. Researchers must conduct thorough experimentation and sensitivity analysis to determine suitable parameter settings for different scenarios [68].
Furthermore, GA-based routing may struggle with finding a balance between exploration and exploitation of the solution space. Premature convergence, where the algorithm becomes trapped in a suboptimal solution, is a common issue. The selection of appropriate selection, crossover, and mutation operators, as well as the management of diversity within the population, are crucial for addressing this challenge. Novel techniques, such as adaptive operators and diversity preservation mechanisms, should be explored to enhance the algorithm’s exploration capabilities [79]. Additionally, the inclusion of real-time data and dynamic updates in GA-based routing introduces additional complexities. The incorporation of real-time factors, such as traffic conditions, charging station availability, or flight restrictions, requires efficient data integration and decision-making mechanisms. Dynamic updates further exacerbate the computational complexity and necessitate algorithms capable of adapting the routes in real-time. Research efforts should focus on developing algorithms that can handle dynamic environments and efficiently incorporate real-time data [1,68].
Addressing these limitations and challenges will pave the way for more effective and efficient GA-based routing solutions in the context of EnFVs. Future research should focus on developing advanced algorithms, incorporating advanced optimization techniques, and integrating emerging technologies to overcome these challenges and unlock the full potential of GA-based routing.
6.3. Trade-Offs between Multiple Objectives
In multi-objective message routing for EnFVs, optimizing multiple objectives often leads to trade-offs among different performance metrics. These trade-offs arise due to the inherent conflicts and dependencies between objectives, making it challenging to find a single optimal solution that simultaneously satisfies all objectives. For instance, in electric vehicle routing, two primary objectives are minimizing travel time and minimizing energy consumption [17,80]. These objectives are inherently contradictory, as reducing the travel time often requires higher vehicle speeds and increased energy consumption. On the other hand, minimizing energy consumption might lead to longer travel times. Therefore, finding an optimal routing solution necessitates striking a balance between these conflicting objectives. Similarly, in the case of FV routing, objectives such as minimizing flight time, avoiding restricted airspace, and optimizing passenger comfort can come into play [9,55]. These objectives may compete with each other, as minimizing the flight time might involve flying through congested or restricted areas, potentially compromising passenger comfort or violating airspace regulations.
To handle these trade-offs, GAs offer a valuable approach. GAs utilize the concept of Pareto dominance and non-dominated sorting to identify a set of Pareto-optimal solutions, also known as the Pareto front [14]. These solutions represent different trade-offs between the multiple objectives, where improving one objective comes at the expense of another. By analyzing the Pareto front, decision-makers can choose the most appropriate solution based on their preferences and priorities. Several metrics can be employed to evaluate the trade-offs between objectives, such as the hypervolume indicator, epsilon dominance, and weighted sum of objectives. These metrics provide insights into the quality and diversity of solutions along the Pareto front, allowing decision makers to understand the trade-offs and make informed decisions [81]. Previous studies in the field demonstrated the effectiveness of GAs in identifying trade-offs and enabling decision-making in multi-objective message routing for EnFVs.
7. Future Research Directions
In the field of multi-objective message routing in EnFVs, there are several promising avenues for future research. These directions aim to enhance the effectiveness and efficiency of routing algorithms and address various challenges and considerations using GA, as described below.
7.1. Integration of Real-Time Data and Dynamic Routing Updates
One promising area for future research in multi-objective message routing for EnFVs is the integration of real-time data and dynamic routing updates [24,80]. Real-time data, such as traffic conditions, weather information, vehicle availability, and charging station status, can significantly impact the performance and efficiency of routing decisions. Incorporating such dynamic factors into the GA-based optimization process can enable adaptive and responsive routing strategies that better account for the current operating conditions of the vehicles and the transportation network. To achieve this integration, researchers can explore various avenues. Firstly, the development of efficient data collection mechanisms and sensors can provide real-time information on key parameters, such as traffic congestion, weather patterns, and charging station availability [20]. These sensors could be integrated into the vehicles or the surrounding infrastructure to gather relevant data continuously.
Secondly, novel algorithms and techniques need to be devised to effectively process and utilize the real-time data [1,82]. Machine learning approaches, such as reinforcement learning, deep learning, or online learning, can be explored to develop models that can learn and adapt to changing conditions in real-time. These models can be integrated into the GA framework to dynamically update the routing decisions based on the latest available data. Furthermore, the scalability of the GA approach needs to be considered when incorporating real-time data [38]. Efficient techniques for handling large-scale and complex routing problems in real-time must be explored to ensure the practicality and feasibility of the proposed solutions.
In conclusion, integrating real-time data and dynamic routing updates into the GA-based optimization framework is a promising direction for future research. This integration can enhance the adaptability, responsiveness, and efficiency of multi-objective message routing in EnFVs. By leveraging real-time information on traffic, weather, and vehicle availability, researchers can develop intelligent routing strategies that effectively balance multiple objectives in dynamic transportation systems.
7.2. Hybrid Approaches and Integration with Other Optimization Techniques
While GAs have shown promise in optimizing multi-objective message routing in EnFVs, there is still room for further advancements by exploring hybrid approaches and integrating them with other optimization techniques. Hybridization involves combining genetic algorithms with complementary optimization methods to leverage their individual strengths and improve the overall performance of the routing algorithms [22,35].
One possible direction for future research is the integration of machine learning techniques with GAs [83,84]. Machine learning algorithms, such as neural networks or reinforcement learning, can be employed to model and predict the dynamic behavior of EnFVs, including traffic patterns, charging station availability, and flight restrictions. These learned models can then be used as heuristic guidance within the GA framework to enhance the decision-making process during message routing. For instance, neural networks can be trained to estimate energy consumption or predict congestion levels, which can inform the GA’s fitness evaluation and help optimize the routing solutions. Such hybrid approaches have the potential to improve the scalability and adaptability of the routing algorithms in dynamic environments. Additionally, the integration of other optimization techniques, such as swarm intelligence algorithms or ant colony optimization with GAs can lead to hybrid algorithms that offer enhanced exploration and exploitation capabilities [85]. For example, swarm intelligence algorithms, inspired by collective behavior in natural systems, can be used to dynamically adapt the population size, mutation rates, or selection strategies in the GA based on the current state of the transportation system. This combination can provide a more robust and efficient search process, enabling the GA to overcome local optima and converge towards better solutions. Furthermore, the use of metaheuristic frameworks, such as genetic programming or memetic algorithms, can also be explored to develop not only the routing solutions but also the operators and parameters within the GA itself [68,86]. This allows for an automated adaptation of the GA’s behavior during the optimization process, leading to improved performance and convergence.
These are just a few potential avenues for future research in the domain of multi-objective message routing in EnFVs using genetic algorithms. Exploring hybrid approaches and integration with other optimization techniques can lead to novel algorithms that tackle the challenges of scalability, adaptability, and efficiency in the context of dynamic transportation systems.
7.3. Consideration of Uncertainty and Risk Management
One critical aspect that requires further investigation in the field of multi-objective message routing for EnFVs is the consideration of uncertainty and risk management. In real-world transportation systems, uncertainties such as unpredictable traffic conditions, weather disruptions, or changes in vehicle availability can significantly impact the performance and reliability of message routing algorithms [87]. Moreover, flying vehicles face additional uncertainties related to airspace regulations, airspace congestion, and flight path deviations due to safety considerations. To address these challenges, future research should focus on developing routing optimization models that explicitly incorporate uncertainty and risk management mechanisms [88]. Bayesian approaches, probabilistic modeling, or uncertainty quantification techniques can be employed to represent and reason about uncertain factors in the routing optimization process. By integrating real-time data and predictive models, these approaches can estimate the likelihood of events and dynamically adapt the routing decisions to minimize potential risks.
One potential avenue for research in this direction is to develop robust optimization models that consider the worst-case scenarios or robust objectives [89]. Robust optimization aims to optimize the system’s performance against a set of plausible future scenarios, rather than assuming a single deterministic scenario. This allows for more resilient and adaptive routing decisions that can handle unforeseen events and uncertainties in the transportation system. Furthermore, the integration of risk management techniques can help in identifying and mitigating potential risks associated with message routing [90]. Risk assessment methodologies, such as fault tree analysis or failure mode and effects analysis, can be employed to identify critical failure points and vulnerabilities in the routing system. By incorporating risk mitigation strategies, such as redundant routes, backup communication channels, or dynamic reconfiguration mechanisms, the routing algorithms can enhance system reliability and resilience in the face of uncertain events. Research in this area could also explore the application of machine learning and data-driven approaches to improve uncertainty and risk management in routing. By leveraging historical data and learning from past routing decisions, machine learning algorithms can assist in predicting and mitigating potential risks and uncertainties. For example, anomaly detection techniques can identify abnormal traffic patterns or system behaviors, triggering proactive measures to ensure reliable message routing.
In summary, future research in multi-objective message routing for EnFVs should give significant attention to the consideration of uncertainty and risk management. The integration of uncertainty quantification techniques, robust optimization models, risk assessment methodologies, and machine learning approaches can enhance the adaptability, reliability, and resilience of routing algorithms in dynamic transportation systems.
7.4. Addressing Scalability and Large-Scale Routing Problems
One of the key challenges in multi-objective message routing in EnFVs is scalability, especially when dealing with large-scale transportation networks [91]. As the number of vehicles and communication nodes increases, the complexity of the routing problem grows exponentially, making it computationally expensive and time-consuming to find optimal or near-optimal solutions. Therefore, addressing scalability is crucial to enable the practical implementation of GA-based routing approaches in real-world scenarios. To tackle scalability, future research should focus on developing efficient and scalable algorithms for large-scale routing problems. One potential direction is the exploration of parallel and distributed computing techniques. By leveraging the power of parallel processing and distributed computing architectures, it is possible to distribute the computation load among multiple computing units, enabling faster and more scalable solutions. For instance, techniques such as parallel GAs, map-reduce frameworks, and cloud computing infrastructure can be explored to efficiently tackle large-scale routing problems [1,49]. Moreover, the utilization of metaheuristic approaches beyond GAs could be investigated. Evolutionary algorithms, including genetic algorithms, have shown promise in multi-objective optimization, but other metaheuristic algorithms such as particle swarm optimization, ant colony optimization, or simulated annealing can also be considered. These algorithms offer different search strategies and exploration–exploitation trade-offs, which may provide improved scalability and convergence properties for large-scale routing optimization problems [91].
Another avenue for future research is the development of hybrid approaches that combine GAs with other optimization techniques or heuristics [3,38]. Hybrid algorithms can leverage the strengths of different algorithms to address scalability challenges effectively. For example, integrating GAs with local search methods or metaheuristic hybrids could potentially improve the exploration of the solution space and enhance the convergence speed for large-scale routing problems [7,91]. Additionally, the investigation of approximation algorithms and heuristics tailored specifically for large-scale routing problems is warranted. These algorithms aim to provide near-optimal solutions within reasonable computational time, even though they do not guarantee global optimality [92]. Approaches such as local search, greedy algorithms, or clustering-based heuristics can be explored and customized to address the unique characteristics and constraints of EnFV routing scenarios.
In conclusion, future research should prioritize addressing scalability challenges and focusing on large-scale routing problems in the context of multi-objective message routing in EnFVs. Exploring parallel and distributed computing techniques, considering alternative metaheuristic algorithms, developing hybrid approaches, and investigating approximation algorithms and heuristics will contribute to the practical implementation of efficient routing solutions for real-world transportation networks.
7.5. Enhancing Energy Efficiency and Sustainability in Routing
One crucial aspect of multi-objective message routing in EnFVs is the need to enhance energy efficiency and promote sustainability [93]. As these vehicles rely on limited energy resources, optimizing routing decisions to minimize energy consumption and promote greener transportation is of paramount importance. Therefore, future research should explore innovative approaches to integrate energy efficiency and sustainability considerations into the GA-based routing optimization.
One potential direction is to develop intelligent routing algorithms that consider the energy consumption patterns of EnFVs [94]. By incorporating vehicle-specific energy models, such as battery discharge rates or power consumption rates, into the fitness evaluation process, the GA can prioritize routes that minimize energy usage. Additionally, dynamically adapting the routing decisions based on real-time energy availability and charging station locations can further optimize energy consumption. Another avenue for research is to explore the integration of renewable energy sources and charging infrastructure planning into the routing optimization process [95]. This can involve incorporating data on renewable energy generation, such as solar or wind power availability, and identifying optimal routes that enable EnFVs to recharge at strategically located charging stations powered by renewable sources. By aligning the routing decisions with sustainable energy generation and distribution, the overall energy efficiency and sustainability of the transportation system can be improved. Furthermore, considering the environmental impact of routing decisions is crucial for promoting sustainability. Future research can focus on integrating environmental factors, such as emissions and air quality, into the multi-objective routing optimization. By incorporating environmental models and data, the GA can generate routes that minimize carbon emissions or avoid areas with high pollution levels, contributing to sustainable transportation practices. Table 5 summarizes the aforementioned directions for future research in the field.
Table 5.
Summary of future research directions in multi-objective message outing for EnFVs.
8. Conclusions
In conclusion, this research paper focused on the challenges of message routing in EnFVs and explored the application of GAs to optimize multi-objective message routing in these dynamic transportation systems. This paper highlighted the unique requirements and complexities posed by EnFVs, such as limited energy resources, airspace regulations, and dynamic operating conditions. Traditional routing algorithms designed for conventional vehicles were found to be inadequate in addressing these challenges. To tackle the multi-objective nature of message routing in EnFVs, researchers turned to GAs, which proved effective in optimizing routing decisions considering multiple objectives and constraints specific to EnFVs. GAs leveraged evolutionary principles to develop potential solutions, allowing for the exploration of the solution space and identifying trade-offs between conflicting objectives. The key findings of this paper emphasized the importance of multi-objective optimization, the effectiveness of GAs in addressing routing problems, and the benefits showcased in case studies. However, the paper acknowledged challenges such as scalability, the integration of real-time data, uncertainty handling, and energy efficiency that require further research and development. The implications of GA-based routing optimization in EnFVs were far-reaching, including reduced energy consumption, improved system reliability, minimized travel time, and enhanced sustainability. Moreover, the integration of real-time data and dynamic routing updates can improve the adaptability and responsiveness of routing algorithms. Future research directions and opportunities were identified, including real-time data and dynamic routing updates, investigating hybrid approaches, considering uncertainty and risk management, addressing scalability, and enhancing energy efficiency in routing.
In summary, this research paper demonstrated the potential of GAs in addressing the multi-objective message routing problem in EnFVs. By providing a comprehensive review of methodologies, highlighting key findings, and suggesting future research directions, this paper significantly contributes to the field of routing optimization in dynamic transportation systems. The application of GAs in EnFV routing offers exciting prospects for advancing the efficiency, reliability, and sustainability of transportation systems. By leveraging the power of GAs, researchers and practitioners can optimize routing solutions and pave the way for more efficient, sustainable, and reliable transportation systems in the future.
Author Contributions
Conceptualization, M.A., T.H., M.Z., A.K. and S.L.; Methodology, M.A.; Software, T.H.; Validation, M.A., T.H., A.K. and S.L.; Formal analysis, M.A.; Resources, T.H. and M.Z.; Data curation, M.A.; Writing—original draft, M.A.; Writing—review & editing, A.K. and S.L.; Visualization, M.A. and M.Z.; Supervision, M.Z., A.K. and S.L.; Project administration, M.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data sharing not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Adadi, A. A survey on data-efficient algorithms in big data era. J. Big Data 2021, 8, 24. [Google Scholar] [CrossRef]
- Kumbhar, F.H.; Shin, S.Y. Innovating Multi-Objective Optimal Message Routing for Unified High Mobility Networks. IEEE Trans. Veh. Technol. 2023, 72, 6571–6583. [Google Scholar] [CrossRef]
- Kumar, Y.; Kumar, P.; Kadian, A. A survey on routing mechanism and techniques in vehicle to vehicle communication (VANET). Int. J. Comput. Sci. Eng. Surv. (IJCSES) 2011, 2, 135–143. [Google Scholar] [CrossRef]
- Sniedovich, M. A multi-objective routing problem revisited. Eng. Optim. 1988, 13, 99–108. [Google Scholar] [CrossRef]
- Kumbhar, F.H.; Shin, S.Y. Novel Vehicular Compatibility-Based Ad Hoc Message Routing Scheme in the Internet of Vehicles Using Machine Learning. IEEE Internet Things J. 2022, 9, 2817–2828. [Google Scholar] [CrossRef]
- Wei, X.; Yang, H.; Huang, W. A genetic-algorithm-based optimization routing for FANETs. Front. Neurorotics 2021, 15, 697624. [Google Scholar] [CrossRef]
- Liu, Q.; Xu, P.; Wu, Y.; Shen, T. A hybrid genetic algorithm for the electric vehicle routing problem with time windows. Control. Theory Technol. 2022, 20, 279–286. [Google Scholar] [CrossRef]
- Chakraborty, S.; Kumar, N.M.; Jayakumar, A.; Dash, S.K.; Elangovan, D. Selected Aspects of Sustainable Mobility Reveals Implementable Approaches and Conceivable Actions. Sustainability 2021, 13, 12918. [Google Scholar] [CrossRef]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar] [CrossRef]
- Jozefowiez, N.; Semet, F.; Talbi, E.G. Multi-objective vehicle routing problems. Eur. J. Oper. Res. 2008, 189, 293–309. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A review on electric vehicles: Technologies and challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Sahraeian, R.; Esmaeili, M. A multi-objective two-echelon capacitated vehicle routing problem for perishable products. J. Ind. Syst. Eng. 2018, 11, 62–84. [Google Scholar]
- Ran, L.L.; Li, L.; Zhao, X. Brief Review on Heterogeneous Vehicle Routing Problems. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 5847–5852. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Alam, T.; Qamar, S.; Dixit, A.; Benaida, M. Genetic algorithm: Reviews, implementations, and applications. arXiv 2020, arXiv:2007.12673. [Google Scholar] [CrossRef]
- Alolaiwy, M.; Zohdy, M. Multi-Objective Message Routing in Electric and Flying Vehicles Using a Genetics Algorithm. Sensors 2023, 23, 1100. [Google Scholar] [CrossRef] [PubMed]
- Ammouriova, M.; Herrera, E.M.; Neroni, M.; Juan, A.A.; Faulin, J. Solving Vehicle Routing Problems under Uncertainty and in Dynamic Scenarios: From Simheuristics to Agile Optimization. Appl. Sci. 2022, 13, 101. [Google Scholar] [CrossRef]
- Ferreira, J.C.; Steiner, M.T.A.; Canciglieri Junior, O. Multi-objective optimization for the green vehicle routing problem: A systematic literature review and future directions. Cogent Eng. 2020, 7, 1807082. [Google Scholar] [CrossRef]
- Haerani, E.; Wardhani, L.K.; Putri, D.K.; Sukmana, H.T. Optimization of multiple depot vehicle routing problem (MDVRP) on perishable product distribution by using genetic algorithm and fuzzy logic controller (FLC). In Proceedings of the 2017 5th International Conference on Cyber and IT Service Management (CITSM), Denpasar, Indonesia, 8–10 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Bharathidasan, M.; Indragandhi, V.; Suresh, V.; Jasiński, M.; Leonowicz, Z. A review on electric vehicle: Technologies, energy trading, and cyber security. Energy Rep. 2022, 8, 9662–9685. [Google Scholar] [CrossRef]
- Javaid, A. Understanding Dijkstra’s algorithm. SSRN Electron. J. 2013, 2340905. [Google Scholar]
- Alinaghian, M.; Zamani, M. A bi-objective fleet size and mix green inventory routing problem, model and solution method. Soft Comput. 2019, 23, 1375–1391. [Google Scholar] [CrossRef]
- Du, A.; Han, Y.; Zhu, Z. Review on multi-objective optimization of energy management strategy for hybrid electric vehicle integrated with traffic information. Energy Sources Part A Recover. Util. Environ. Eff. 2022, 44, 7914–7933. [Google Scholar] [CrossRef]
- Aguilar-Rivera, R.; Valenzuela-Rendón, M.; Rodríguez-Ortiz, J. Genetic algorithms and Darwinian approaches in financial applications: A survey. Expert Syst. Appl. 2015, 42, 7684–7697. [Google Scholar] [CrossRef]
- Kaleybar, H.J.; Davoodi, M.; Brenna, M.; Zaninelli, D. Applications of Genetic Algorithm and its Variants in Rail Vehicle Systems: A Bibliometric Analysis and Comprehensive Review. IEEE Access 2023, 11, 68972–68993. [Google Scholar] [CrossRef]
- Marampoutis, I.; Vinot, M.; Trilling, L. Multi-objective vehicle routing problem with flexible scheduling for the collection of refillable glass bottles: A case study. EURO J. Decis. Process. 2022, 10, 100011. [Google Scholar] [CrossRef]
- Yuan, J.; Liu, Z.; Lian, Y.; Chen, L.; An, Q.; Wang, L.; Ma, B. Global optimization of UAV area coverage path planning based on good point set and genetic algorithm. Aerospace 2022, 9, 86. [Google Scholar] [CrossRef]
- Sabet, S.; Farooq, B. Green Vehicle Routing Problem: State of the Art and Future Directions. IEEE Access 2022, 101622–101642. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Vijay, K. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Rajesh, K.; Jain, E.; Kotecha, P. A Multi-Objective approach to the Electric Vehicle Routing Problem. arXiv 2022, arXiv:2208.12440. [Google Scholar]
- Widuch, J. Current and emerging formulations and models of real-life rich vehicle routing problems. In Smart Delivery Systems; Elsevier: Amsterdam, The Netherlands, 2020; pp. 1–35. [Google Scholar]
- Liu, C.; Wu, J.; Long, C. Joint charging and routing optimization for electric vehicle navigation systems. IFAC Proc. Vol. 2014, 47, 2106–2111. [Google Scholar] [CrossRef]
- Ombuki, B.; Ross, B.J.; Hanshar, F. Multi-objective genetic algorithms for vehicle routing problem with time windows. Appl. Intell. 2006, 24, 17–30. [Google Scholar] [CrossRef]
- Syafrizal, W.; Sugiharti, E. Electric Vehicle Routing Problem with Fuzzy Time Windows using Genetic Algorithm and Tabu Search. J. Adv. Inf. Syst. Technol. 2022, 4, 205–221. [Google Scholar] [CrossRef]
- Akbar, M.D.; Aurachmana, R. Hybrid genetic–tabu search algorithm to optimize the route for capacitated vehicle routing problem with time window. Int. J. Ind. Optim. 2020, 1, 15–28. [Google Scholar] [CrossRef]
- Mohammed, M.A.; Abd Ghani, M.K.; Hamed, R.I.; Mostafa, S.A.; Ahmad, M.S.; Ibrahim, D.A. Solving vehicle routing problem by using improved genetic algorithm for optimal solution. J. Comput. Sci. 2017, 21, 255–262. [Google Scholar] [CrossRef]
- Agrawal, A.K.; Yadav, S.; Gupta, A.A.; Pandey, S. A genetic algorithm model for optimizing vehicle routing problems with perishable products under time-window and quality requirements. Decis. Anal. J. 2022, 5, 100139. [Google Scholar] [CrossRef]
- Goel, A.; Gruhn, V. Solving a dynamic real-life vehicle routing problem. In Proceedings of the Operations Research Proceedings 2005: Selected Papers of the Annual International Conference of the German Operations Research Society (GOR), Bremen, Germany, 7–9 September 2005; Springer: Berlin/Heidelberg, Germany, 2006; pp. 367–372. [Google Scholar]
- Sadouni, K. Heterogeneous fleet vehicle routing problem with time windows and nonlinearly penalized delays. J. Appl. Sci. 2006, 6, 1969–1973. [Google Scholar] [CrossRef]
- Méndez, C.; Dondo, R.; Cerdá, J. Towards optimal logistics management of complex distribution networks. In Proceedings of the Foundations of Computer-Aided Process Operations (FOCAPO 2008), Cambridge, MA, USA, 29 June–2 July 2008; pp. 485–488. [Google Scholar]
- Penna, P.H.V.; Subramanian, A.; Ochi, L.S. An iterated local search heuristic for the heterogeneous fleet vehicle routing problem. J. Heuristics 2013, 19, 201–232. [Google Scholar] [CrossRef]
- Kritikos, M.N.; Ioannou, G. The heterogeneous fleet vehicle routing problem with overloads and time windows. Int. J. Prod. Econ. 2013, 144, 68–75. [Google Scholar] [CrossRef]
- Solomon, M.M. Algorithms for the vehicle routing and scheduling problems with time window constraints. Oper. Res. 1987, 35, 254–265. [Google Scholar] [CrossRef]
- Mungwattana, A.; Soonpracha, K.; Manisri, T. A practical case study of a heterogeneous fleet vehicle routing problem with various constraints. In Proceedings of the 2016 International Conference on Industrial Engineering and Operations Management, Kuala Lumpur, Malaysia, 8–10 March 2016; pp. 948–957. [Google Scholar]
- Cheng, C.; Yang, P.; Qi, M.; Rousseau, L.M. Modeling a green inventory routing problem with a heterogeneous fleet. Transp. Res. Part E Logist. Transp. Rev. 2017, 97, 97–112. [Google Scholar] [CrossRef]
- Cai, W.; Zhang, Y.; Huang, F.; Ma, C. Delivery routing problem of pure electric vehicle with multi-objective pick-up and delivery integration. PLoS ONE 2023, 18, e0281131. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.; Zuo, X.; Kaku, I.; Zhou, S.; Pan, X. Development of energy consumption optimization model for the electric vehicle routing problem with time windows. J. Clean. Prod. 2019, 225, 647–663. [Google Scholar] [CrossRef]
- Shen, Y.; Yu, L.; Li, J. Robust electric vehicle routing problem with time windows under demand uncertainty and weight-related energy consumption. Complex Syst. Model. Simul. 2022, 2, 18–34. [Google Scholar] [CrossRef]
- Goeke, D.; Schneider, M. Routing a mixed fleet of electric and conventional vehicles. Eur. J. Oper. Res. 2015, 245, 81–99. [Google Scholar] [CrossRef]
- Torabi, S.; Bellone, M.; Wahde, M. Energy minimization for an electric bus using a genetic algorithm. Eur. Transp. Res. Rev. 2020, 12, 1–8. [Google Scholar] [CrossRef]
- Basso, R.; Kulcsár, B.; Egardt, B.; Lindroth, P.; Sanchez-Diaz, I. Energy consumption estimation integrated into the electric vehicle routing problem. Transp. Res. Part D Transp. Environ. 2019, 69, 141–167. [Google Scholar] [CrossRef]
- Xia, Y.; Zeng, W.; Xing, X.; Zhan, Y.; Tan, K.H.; Kumar, A. Joint optimisation of drone routing and battery wear for sustainable supply chain development: A mixed-integer programming model based on blockchain-enabled fleet sharing. Ann. Oper. Res. 2021, 327, 89–127. [Google Scholar] [CrossRef]
- Shi, Y.; Lin, Y.; Li, B.; Li, R.Y.M. A bi-objective optimization model for the medical supplies’ simultaneous pickup and delivery with drones. Comput. Ind. Eng. 2022, 171, 108389. [Google Scholar] [CrossRef] [PubMed]
- Jeauneau, V.; Jouanneau, L.; Kotenkoff, A. Path planner methods for UAVs in real environment. IFAC-PapersOnLine 2018, 51, 292–297. [Google Scholar] [CrossRef]
- Dai, R.; Fotedar, S.; Radmanesh, M.; Kumar, M. Quality-aware UAV coverage and path planning in geometrically complex environments. Ad Hoc Netw. 2018, 73, 95–105. [Google Scholar] [CrossRef]
- Luo, H.; Liang, Z.; Zhu, M.; Hu, X.; Wang, G. Integrated optimization of unmanned aerial vehicle task allocation and path planning under steady wind. PLoS ONE 2018, 13, e0194690. [Google Scholar] [CrossRef] [PubMed]
- Greiff, M.; Robertsson, A. Optimisation-based motion planning with obstacles and priorities. IFAC-PapersOnLine 2017, 50, 11670–11676. [Google Scholar] [CrossRef]
- Chen, J.; Ye, F.; Li, Y. Travelling salesman problem for UAV path planning with two parallel optimization algorithms. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium-Fall (PIERS-FALL), Singapore, 19–22 November 2017; IEEE: Piscataway Township, NJ, USA, 2017; pp. 832–837. [Google Scholar]
- Bouzid, Y.; Bestaoui, Y.; Siguerdidjane, H. Quadrotor-UAV optimal coverage path planning in cluttered environment with a limited onboard energy. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Piscataway Township, NJ, USA, 2017; pp. 979–984. [Google Scholar]
- Mourelo Ferrandez, S.; Harbison, T.; Webwer, T.; Sturges, R.; Rich, R. Optimization of a truck-drone in tandem delivery network using k-means and genetic algorithm. J. Ind. Eng. Manag. 2016, 9, 374–388. [Google Scholar] [CrossRef]
- Liu, W.; Li, W.; Zhou, Q.; Die, Q.; Yang, Y. The optimization of the" UAV-vehicle" joint delivery route considering mountainous cities. PLoS ONE 2022, 17, e0265518. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Liu, H.; Lai, K.K.; Ram, B. Vehicle and UAV Collaborative Delivery Path Optimization Model. Mathematics 2022, 10, 3744. [Google Scholar] [CrossRef]
- Shavarani, S.M.; Nejad, M.G.; Rismanchian, F.; Izbirak, G. Application of hierarchical facility location problem for optimization of a drone delivery system: A case study of Amazon prime air in the city of San Francisco. Int. J. Adv. Manuf. Technol. 2018, 95, 3141–3153. [Google Scholar] [CrossRef]
- Sajid, M.; Mittal, H.; Pare, S.; Prasad, M. Routing and scheduling optimization for UAV assisted delivery system: A hybrid approach. Appl. Soft Comput. 2022, 126, 109225. [Google Scholar] [CrossRef]
- Pehlivanoglu, Y.V.; Pehlivanoglu, P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar] [CrossRef]
- Khan, S.I.; Qadir, Z.; Munawar, H.S.; Nayak, S.R.; Budati, A.K.; Verma, K.D.; Prakash, D. UAVs path planning architecture for effective medical emergency response in future networks. Phys. Commun. 2021, 47, 101337. [Google Scholar] [CrossRef]
- Euchi, J.; Sadok, A. Hybrid genetic-sweep algorithm to solve the vehicle routing problem with drones. Phys. Commun. 2021, 44, 101236. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Z.; Li, X. Optimal delivery route planning for a fleet of heterogeneous drones: A rescheduling-based genetic algorithm approach. Comput. Ind. Eng. 2023, 179, 109179. [Google Scholar] [CrossRef]
- Changjiang, G.; Yinan, C.; Xiaohai, T. Research on distribution route planning model and algorithm of unmanned aerial vehicle (UAV) based on improved multi-objective genetic algorithm. In Proceedings of the 2021 2nd International Conference on Artificial Intelligence and Information Systems, Chongqing, China, 28–30 May 2021; pp. 1–7. [Google Scholar]
- Kuo, R.; Edbert, E.; Zulvia, F.E.; Lu, S.H. Applying NSGA-II to vehicle routing problem with drones considering makespan and carbon emission. Expert Syst. Appl. 2023, 221, 119777. [Google Scholar] [CrossRef]
- Hazama, Y.; Iima, H.; Karuno, Y.; Mishima, K. Genetic algorithm for scheduling of parcel delivery by drones. J. Adv. Mech. Des. Syst. Manuf. 2021, 15, JAMDSM0069. [Google Scholar] [CrossRef]
- Chiang, W.C.; Li, Y.; Shang, J.; Urban, T.L. Impact of drone delivery on sustainability and cost: Realizing the UAV potential through vehicle routing optimization. Appl. Energy 2019, 242, 1164–1175. [Google Scholar] [CrossRef]
- Khoufi, I.; Laouiti, A.; Adjih, C.; Hadded, M. UAVs trajectory optimization for data pick up and delivery with time window. Drones 2021, 5, 27. [Google Scholar] [CrossRef]
- Sawadsitang, S.; Niyato, D.; Tan, P.S.; Wang, P. Joint ground and aerial package delivery services: A stochastic optimization approach. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2241–2254. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, M.; Zhang, Y.; Lu, Y.; Xu, B.; Yu, L. Cascade hydropower system operation considering ecological flow based on different multi-objective genetic algorithms. Water Resour. Manag. 2023, 37, 3093–3110. [Google Scholar] [CrossRef]
- Zhang, B. The Optimization of Distribution Path of Fresh Cold Chain Logistics Based on Genetic Algorithm. Comput. Intell. Neurosci. 2022, 2022, 4667010. [Google Scholar] [CrossRef] [PubMed]
- Thibbotuwawa, A.; Bocewicz, G.; Nielsen, P.; Banaszak, Z. Unmanned aerial vehicle routing problems: A literature review. Appl. Sci. 2020, 10, 4504. [Google Scholar] [CrossRef]
- Sobania, D.; Schweim, D.; Rothlauf, F. A comprehensive survey on program synthesis with evolutionary algorithms. IEEE Trans. Evol. Comput. 2022, 27, 82–97. [Google Scholar] [CrossRef]
- Zhan, Z.H.; Shi, L.; Tan, K.C.; Zhang, J. A survey on evolutionary computation for complex continuous optimization. Artif. Intell. Rev. 2022, 55, 59–110. [Google Scholar] [CrossRef]
- Alves Junior, J.; Wille, E.C. Routing in vehicular ad hoc networks: Main characteristics and tendencies. J. Comput. Netw. Commun. 2018, 2018, 1302123. [Google Scholar] [CrossRef]
- Ahn, K.; Bichiou, Y.; Farag, M.; Rakha, H.A. Multi-objective Eco-Routing Model Development and Evaluation for Battery Electric Vehicles. Transp. Res. Rec. 2021, 2675, 867–879. [Google Scholar] [CrossRef]
- Benamar, N.; Singh, K.D.; Benamar, M.; El Ouadghiri, D.; Bonnin, J.M. Routing protocols in vehicular delay tolerant networks: A comprehensive survey. Comput. Commun. 2014, 48, 141–158. [Google Scholar] [CrossRef]
- Fazio, P.; De Rango, F.; Sottile, C.; Santamaria, A.F. Routing optimization in vehicular networks: A new approach based on multiobjective metrics and minimum spanning tree. Int. J. Distrib. Sens. Netw. 2013, 9, 598675. [Google Scholar] [CrossRef]
- Sehgal, A.; La, H.; Louis, S.; Nguyen, H. Deep reinforcement learning using genetic algorithm for parameter optimization. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 596–601. [Google Scholar]
- Luan, J.; Yao, Z.; Zhao, F.; Song, X. A novel method to solve supplier selection problem: Hybrid algorithm of genetic algorithm and ant colony optimization. Math. Comput. Simul. 2019, 156, 294–309. [Google Scholar] [CrossRef]
- Wang, S.; Mei, Y.; Zhang, M.; Yao, X. Genetic programming with niching for uncertain capacitated arc routing problem. IEEE Trans. Evol. Comput. 2021, 26, 73–87. [Google Scholar] [CrossRef]
- Adriano, D.D.; Montez, C.; Novaes, A.G.; Wangham, M. DMRVR: Dynamic milk-run vehicle routing solution using fog-based vehicular ad hoc networks. Electronics 2020, 9, 2010. [Google Scholar] [CrossRef]
- Ganesh, A.D.; Kalpana, P. Future of artificial intelligence and its influence on supply chain risk management–A systematic review. Comput. Ind. Eng. 2022, 169, 108206. [Google Scholar] [CrossRef]
- Ash, C.; Diallo, C.; Venkatadri, U.; VanBerkel, P. Distributionally robust optimization of a Canadian healthcare supply chain to enhance resilience during the COVID-19 pandemic. Comput. Ind. Eng. 2022, 168, 108051. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Yu, F.R.; Zhang, P. A survey on cyber-security of connected and autonomous vehicles (CAVs). IEEE Trans. Intell. Transp. Syst. 2021, 23, 6240–6259. [Google Scholar] [CrossRef]
- Tian, Y.; Si, L.; Zhang, X.; Cheng, R.; He, C.; Tan, K.C.; Jin, Y. Evolutionary large-scale multi-objective optimization: A survey. Acm Comput. Surv. (CSUR) 2021, 54, 1–34. [Google Scholar] [CrossRef]
- Shin, Y.W.; Abebe, M.; Noh, Y.; Lee, S.; Lee, I.; Kim, D.; Bae, J.; Kim, K.C. Near-optimal weather routing by using improved A* algorithm. Appl. Sci. 2020, 10, 6010. [Google Scholar] [CrossRef]
- Borawake-Satao, R.; Prasad, R. Mobility aware multi-objective routing in wireless multimedia sensor network. Multimed. Tools Appl. 2019, 78, 32659–32677. [Google Scholar] [CrossRef]
- Thangaramya, K.; Kulothungan, K.; Logambigai, R.; Selvi, M.; Ganapathy, S.; Kannan, A. Energy aware cluster and neuro-fuzzy based routing algorithm for wireless sensor networks in IoT. Comput. Netw. 2019, 151, 211–223. [Google Scholar] [CrossRef]
- Albert, J.R.; Selvan, P.; Sivakumar, P.; Rajalakshmi, R. An advanced electrical vehicle charging station using adaptive hybrid particle swarm optimization intended for renewable energy system for simultaneous distributions. J. Intell. Fuzzy Syst. 2022, 43, 4395–4407. [Google Scholar] [CrossRef]
- Khoo, T.S.; Mohammad, B.B. The parallelization of a two-phase distributed hybrid ruin-and-recreate genetic algorithm for solving multi-objective vehicle routing problem with time windows. Expert Syst. Appl. 2021, 168, 114408. [Google Scholar] [CrossRef]
- Choudhury, S.; Solovey, K.; Kochenderfer, M.J.; Pavone, M. Efficient large-scale multi-drone delivery using transit networks. J. Artif. Intell. Res. 2021, 70, 757–788. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Mozaffari, M.; Chaib, N.; Lorenz, P.; Atiquzzaman, M.; Jamalipour, A. ECaD: Energy-efficient routing in flying ad hoc networks. Int. J. Commun. Syst. 2019, 32, e4156. [Google Scholar] [CrossRef]
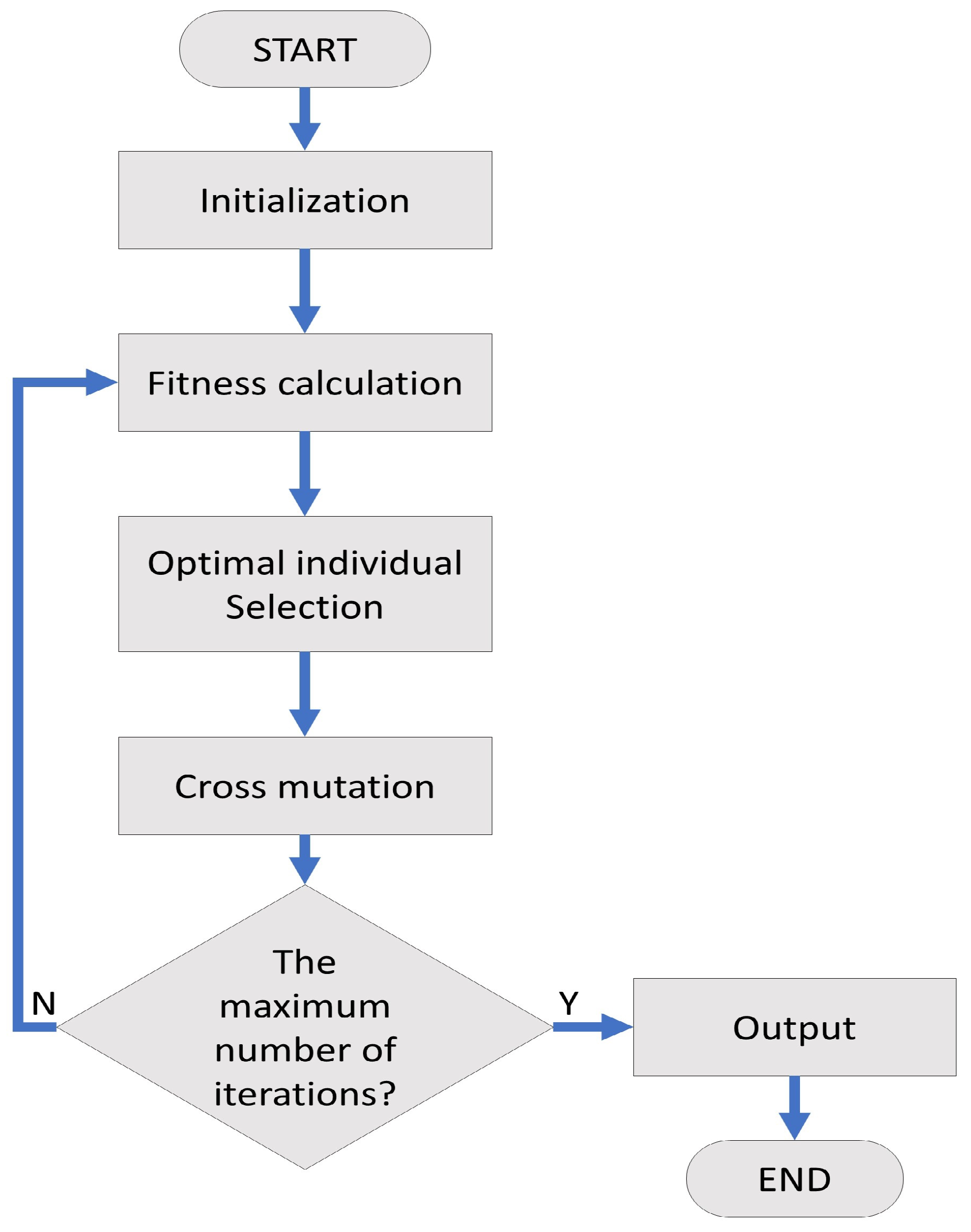
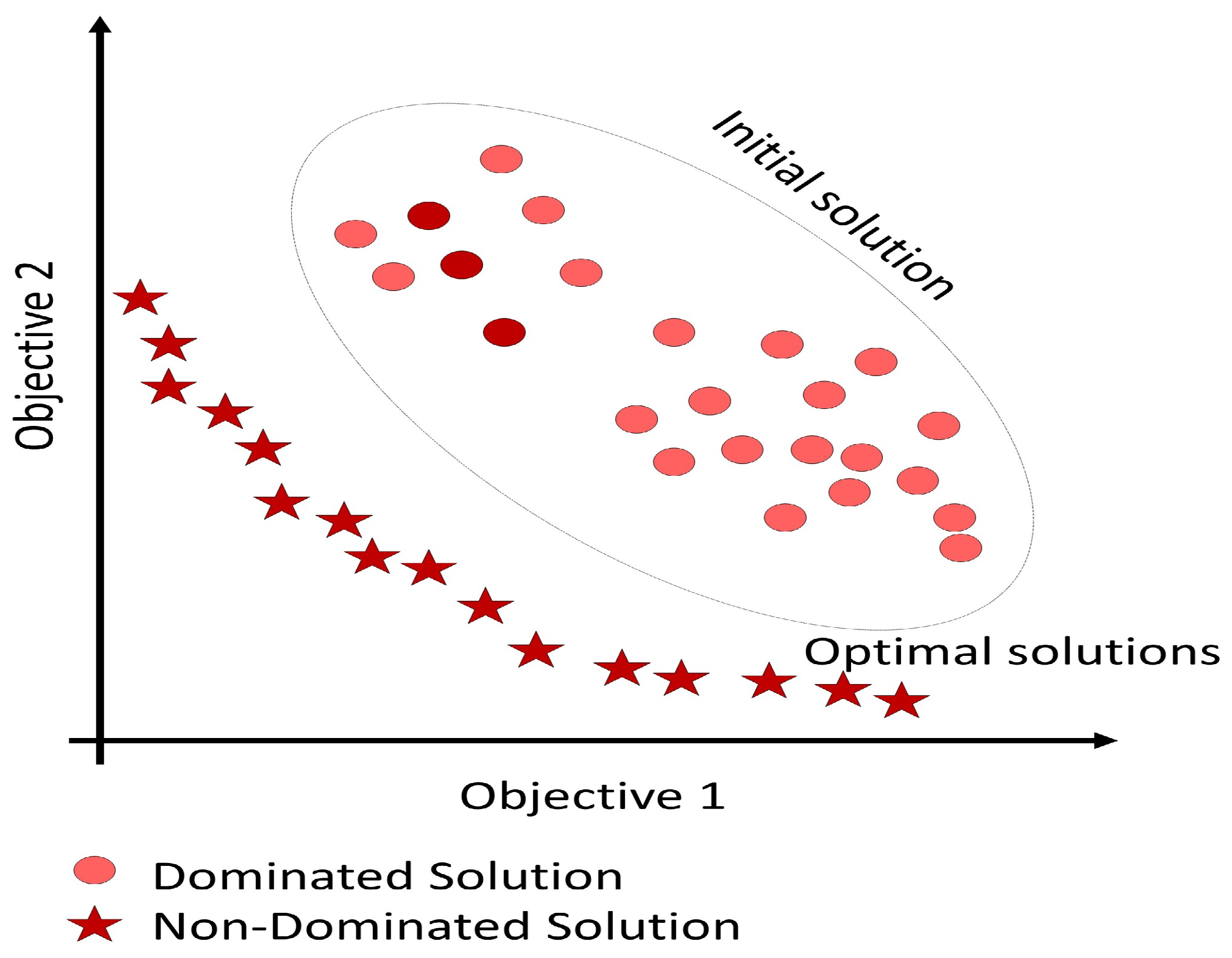
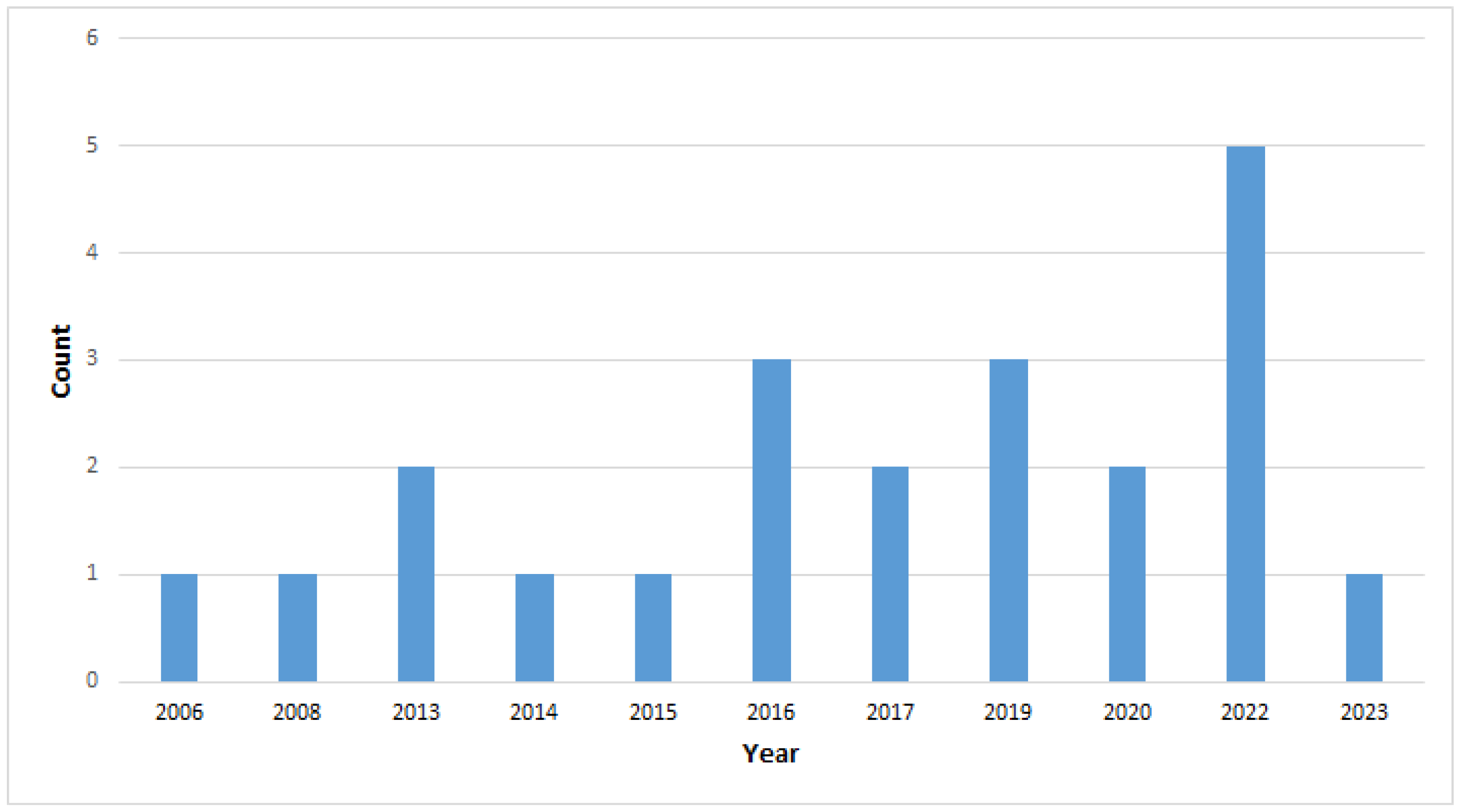
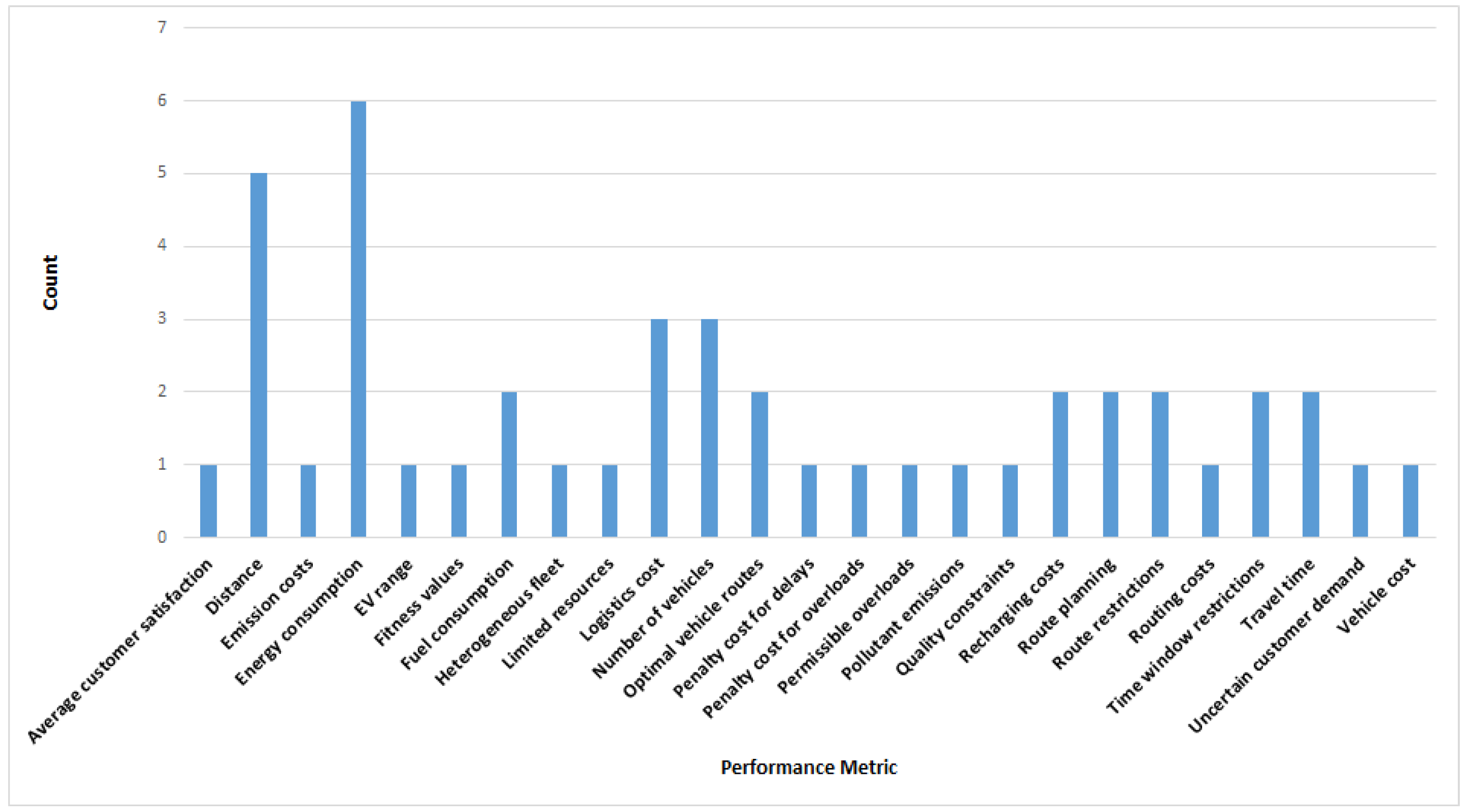
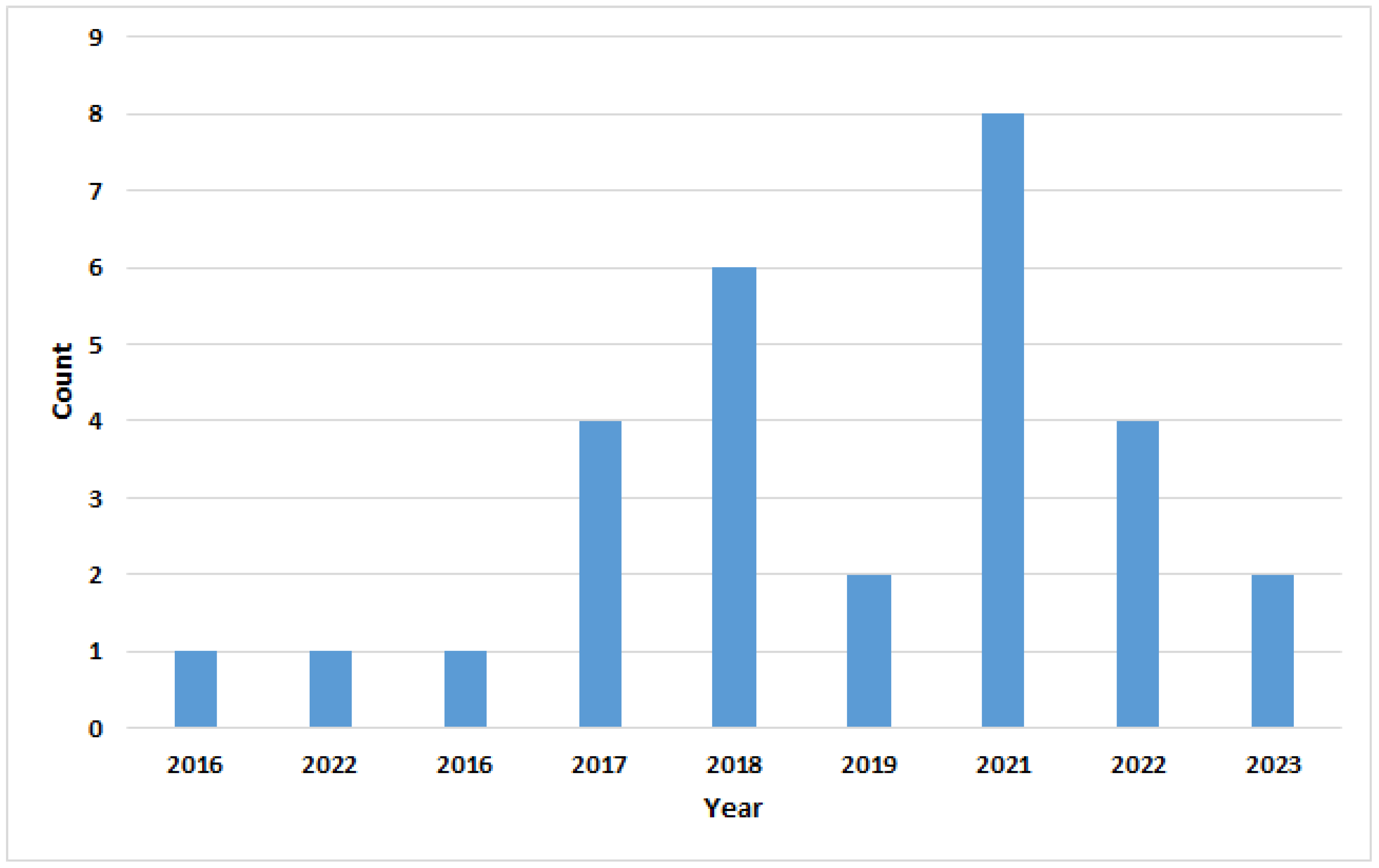
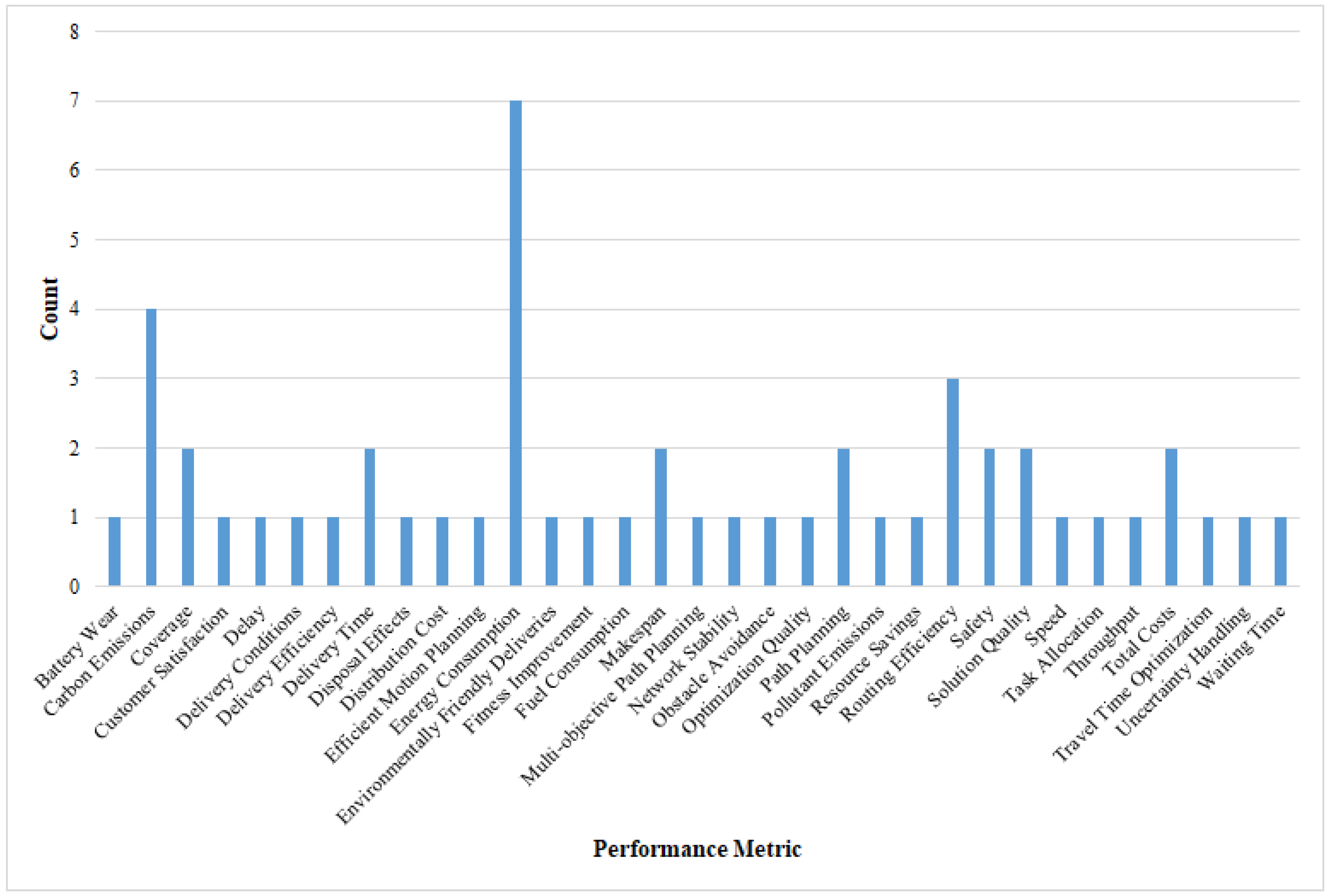
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).