
Fault-Tolerant Control Scheme for the Sensor Fault in the Acceleration Process of Variable Cycle Engine


Abstract
:1. Introduction
2. On-Board Adaptive Model
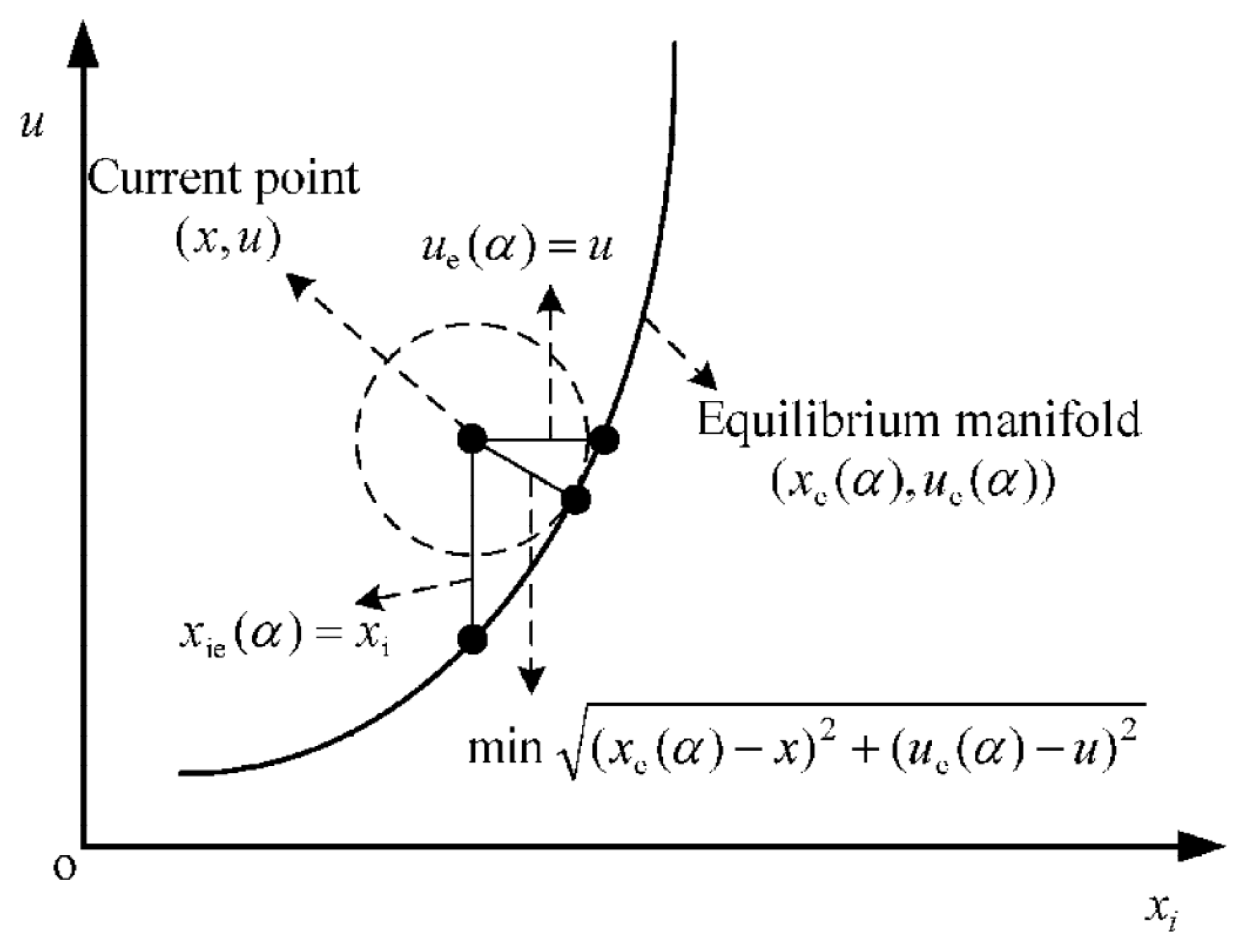
2.1. Equilibrium Manifold Model
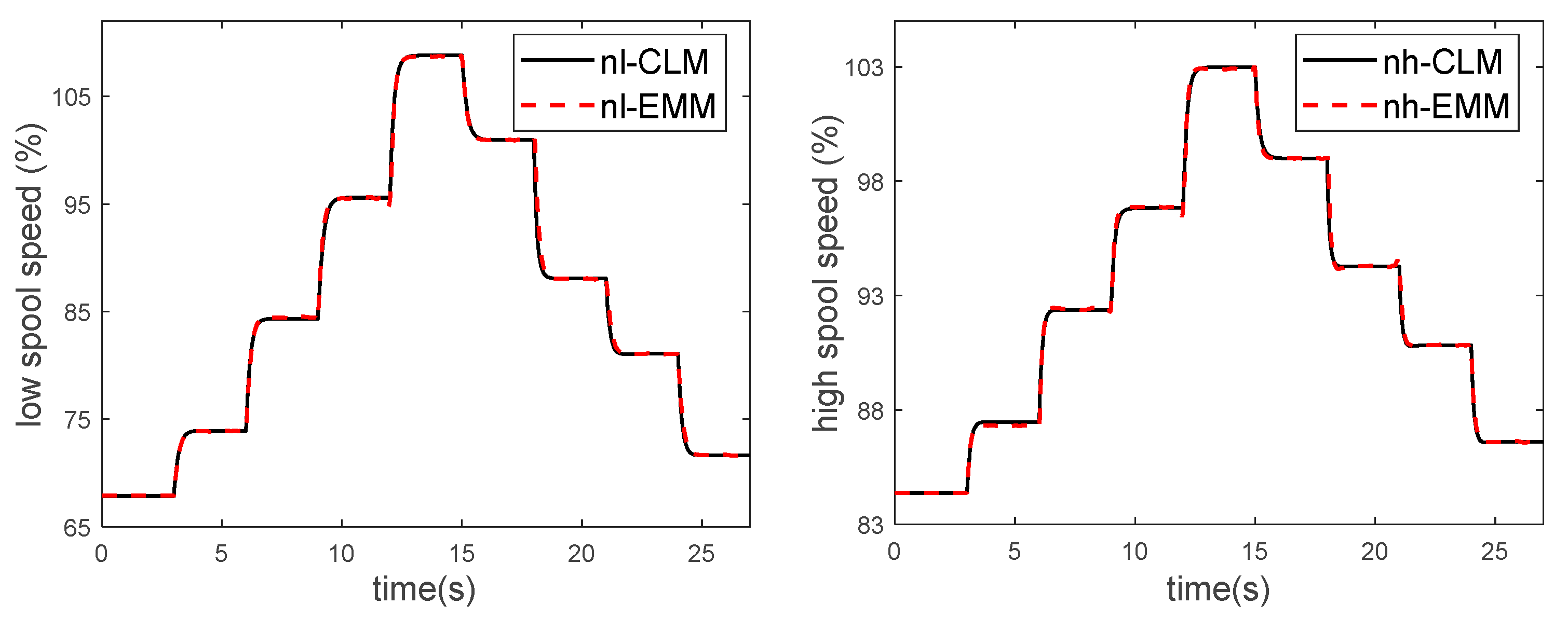
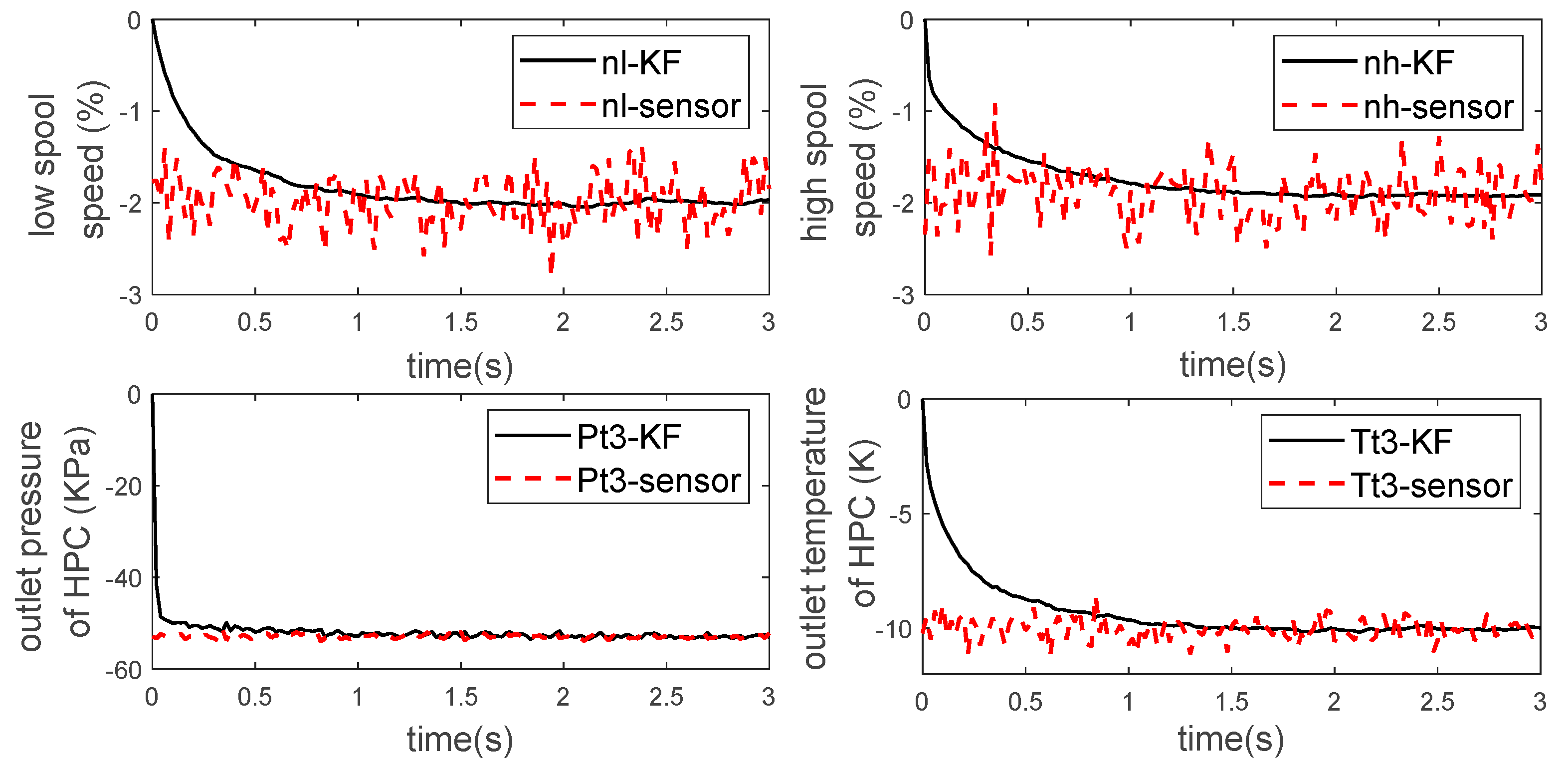
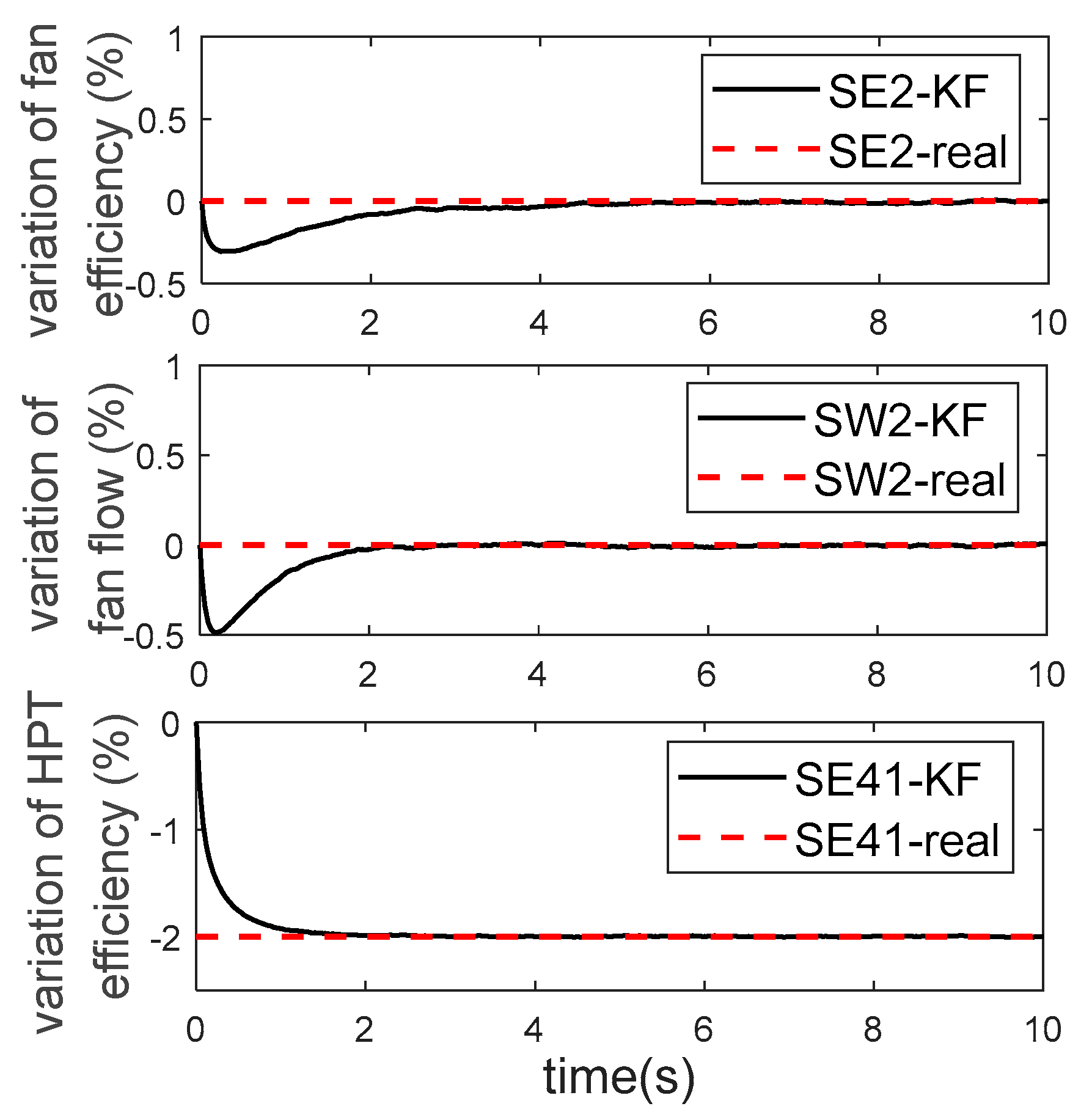
2.2. On-Board Adaptive Equilibrium Manifold Model
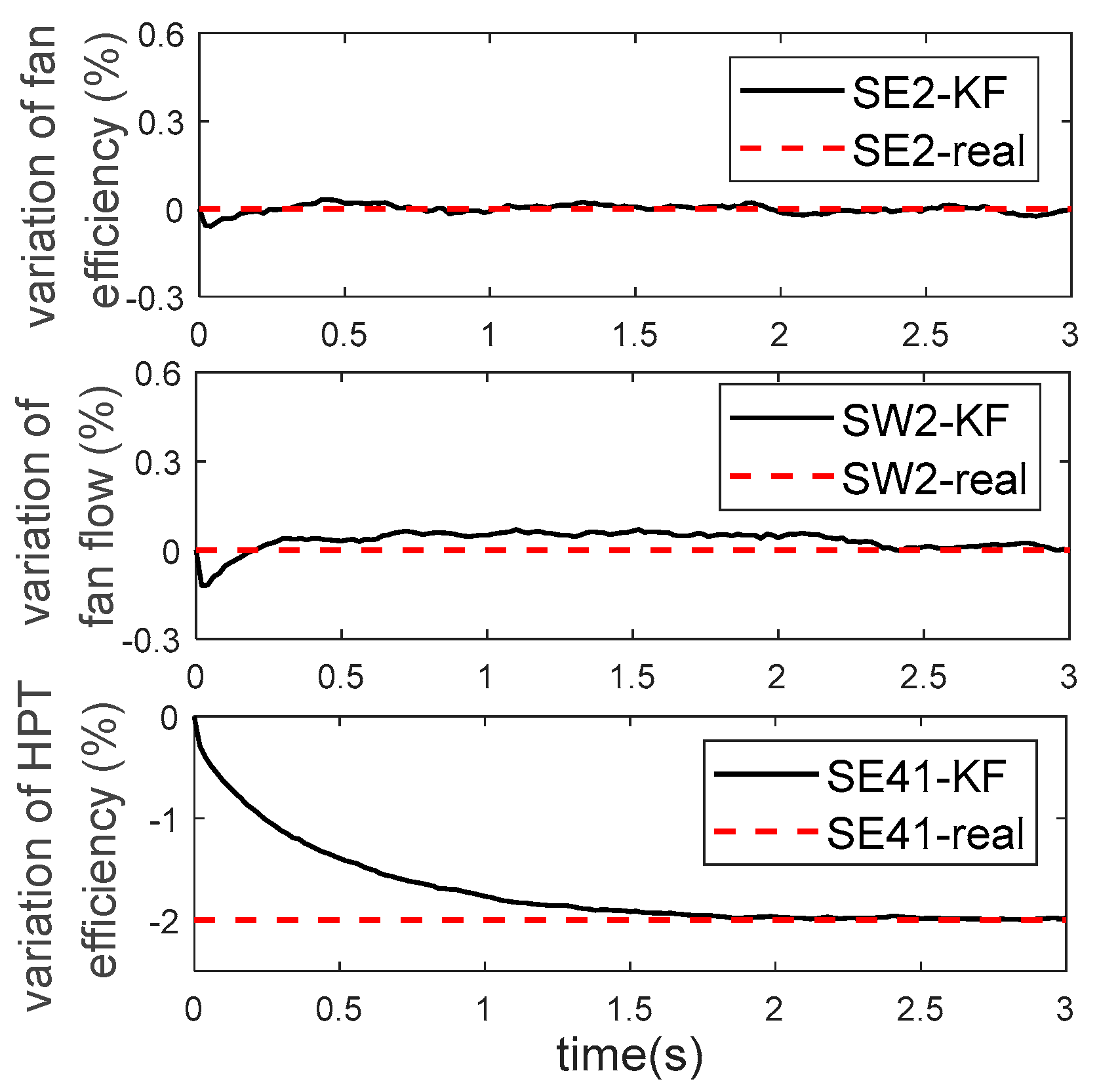
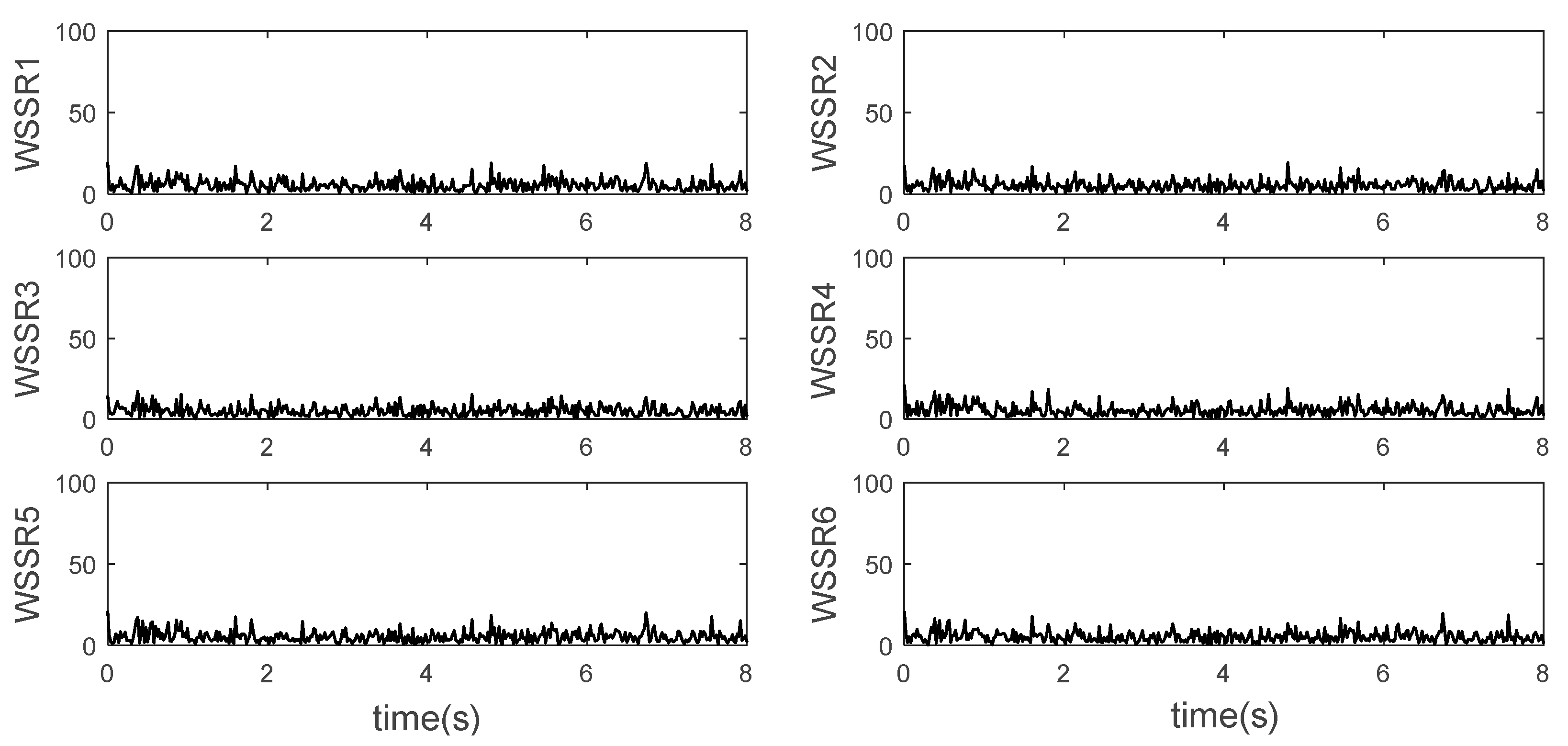
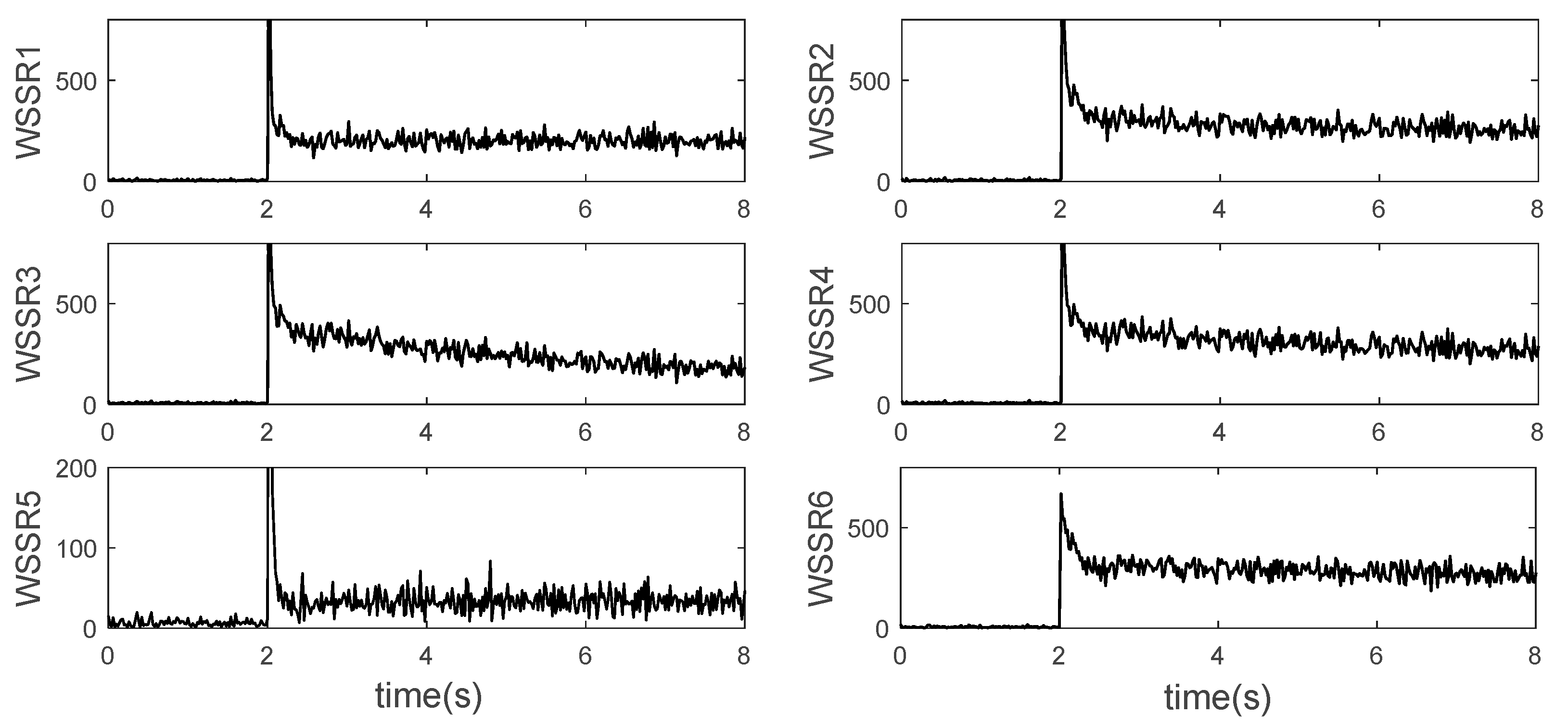
3. Sensor Fault Diagnosis
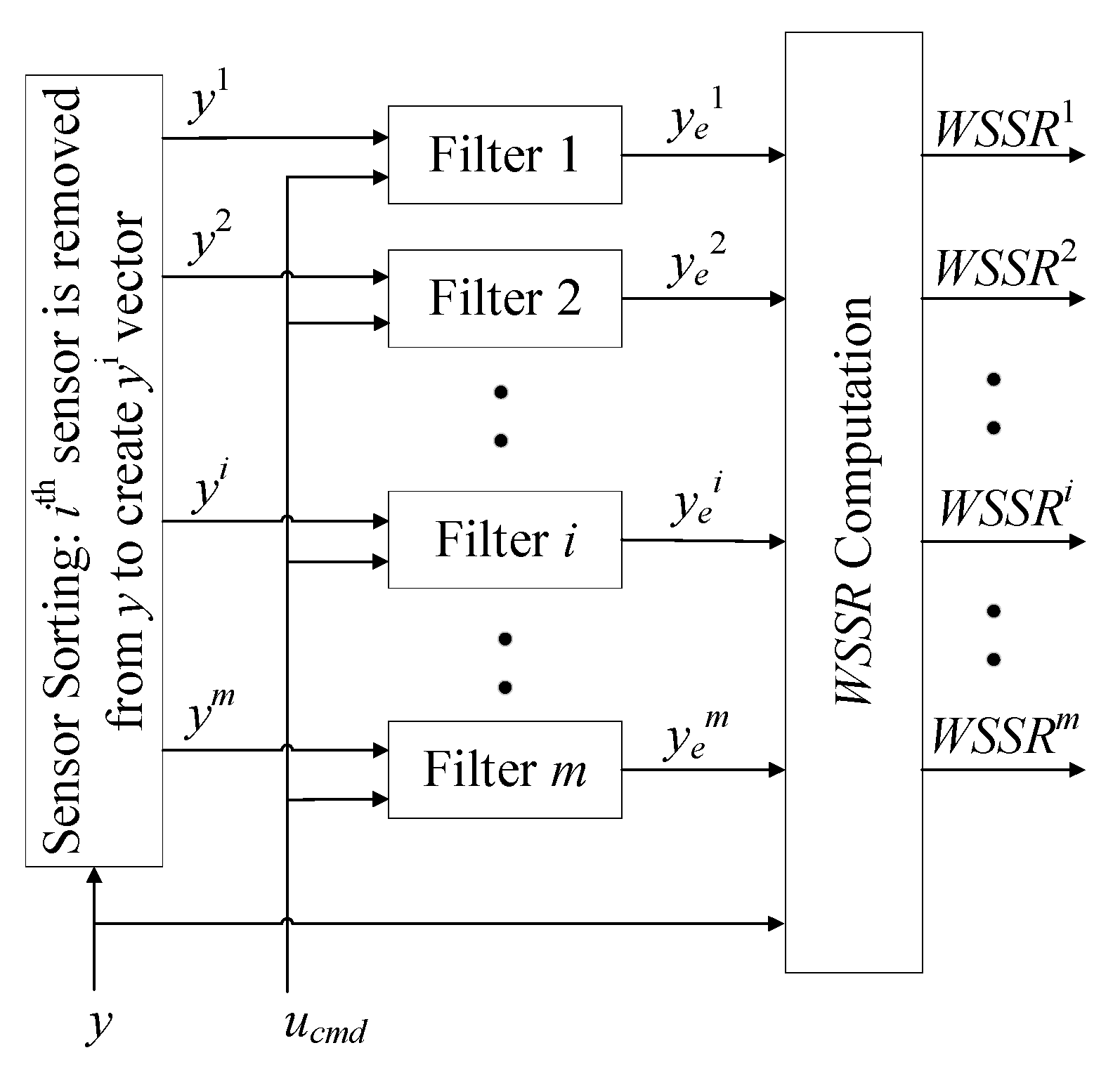
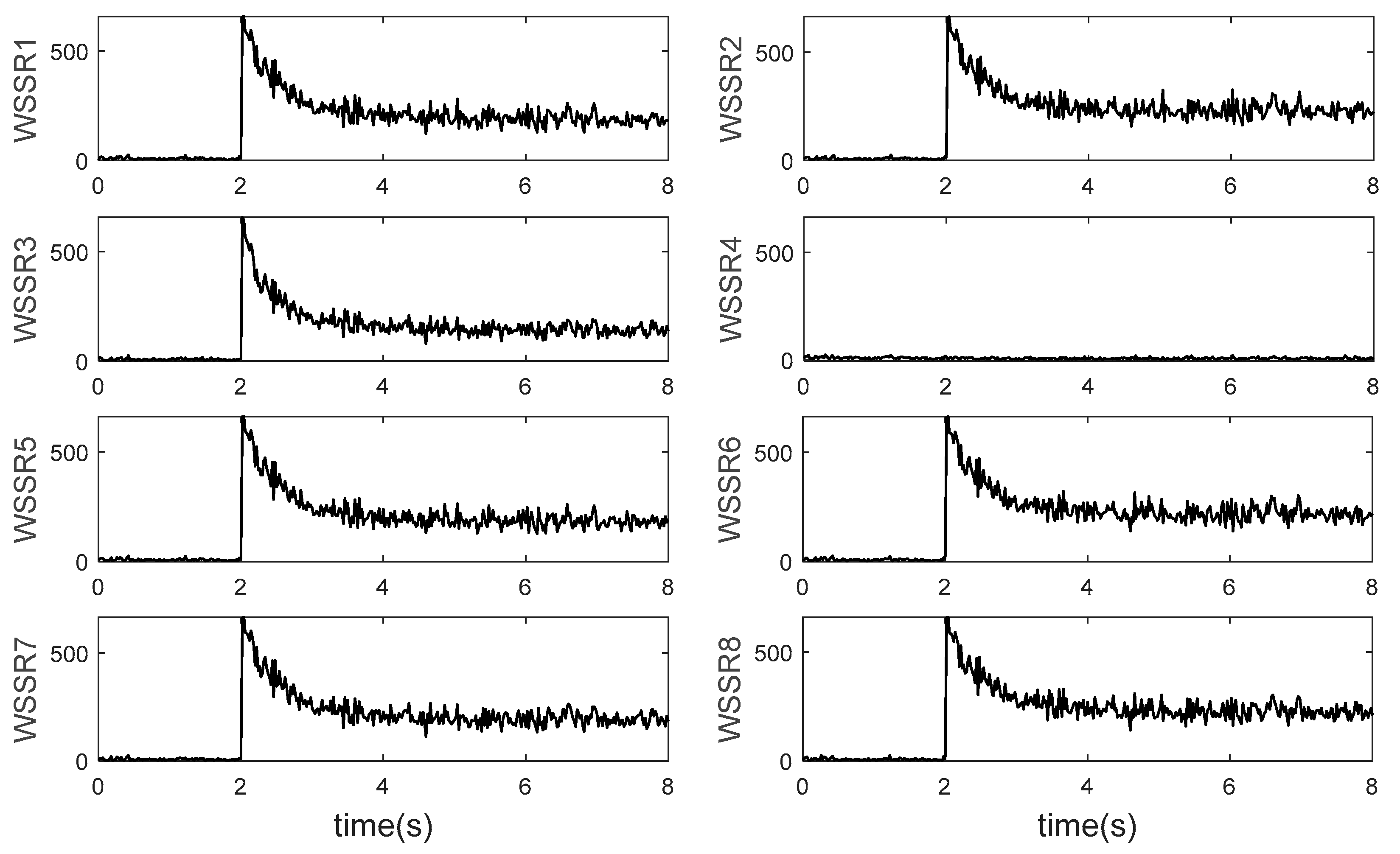
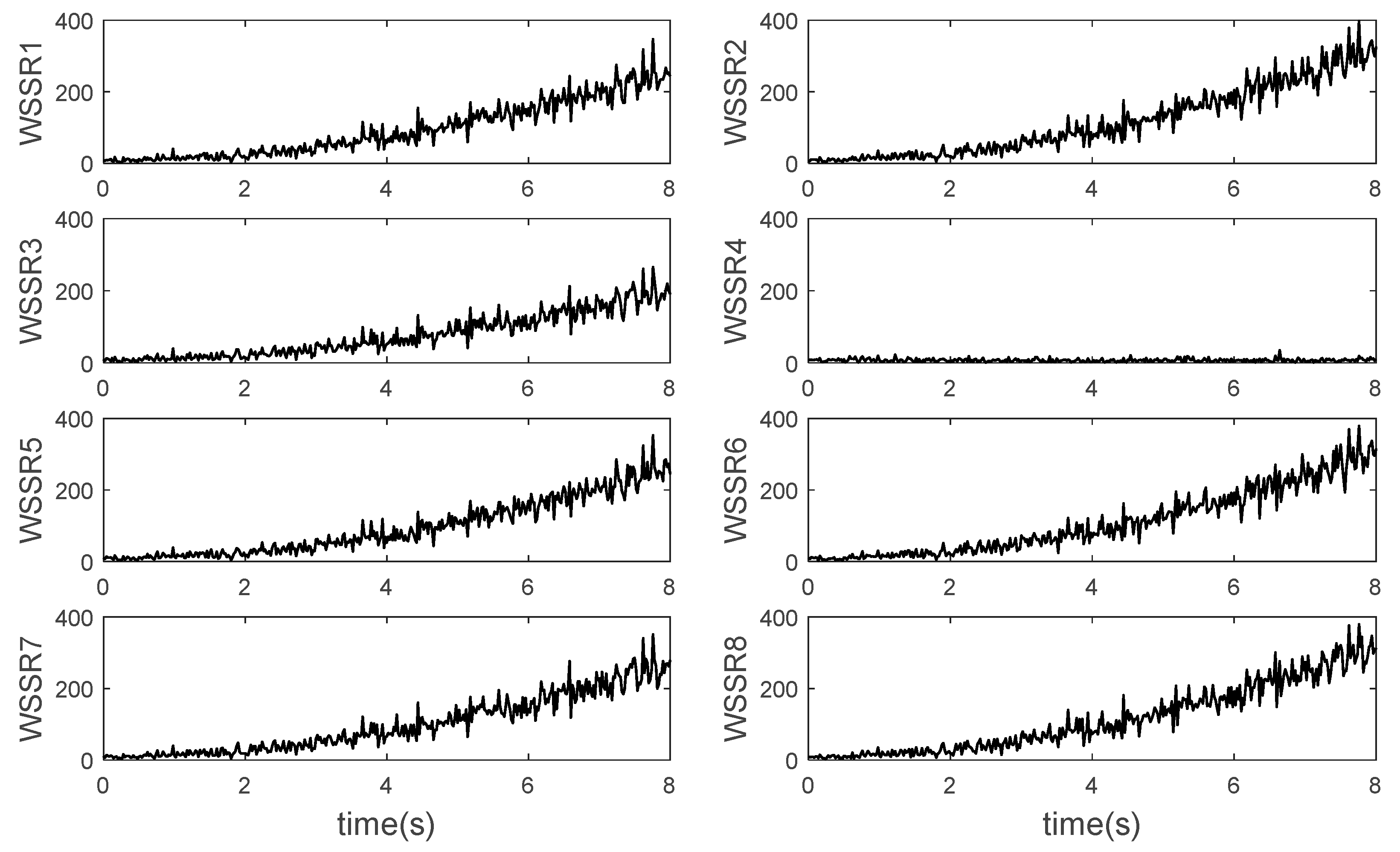
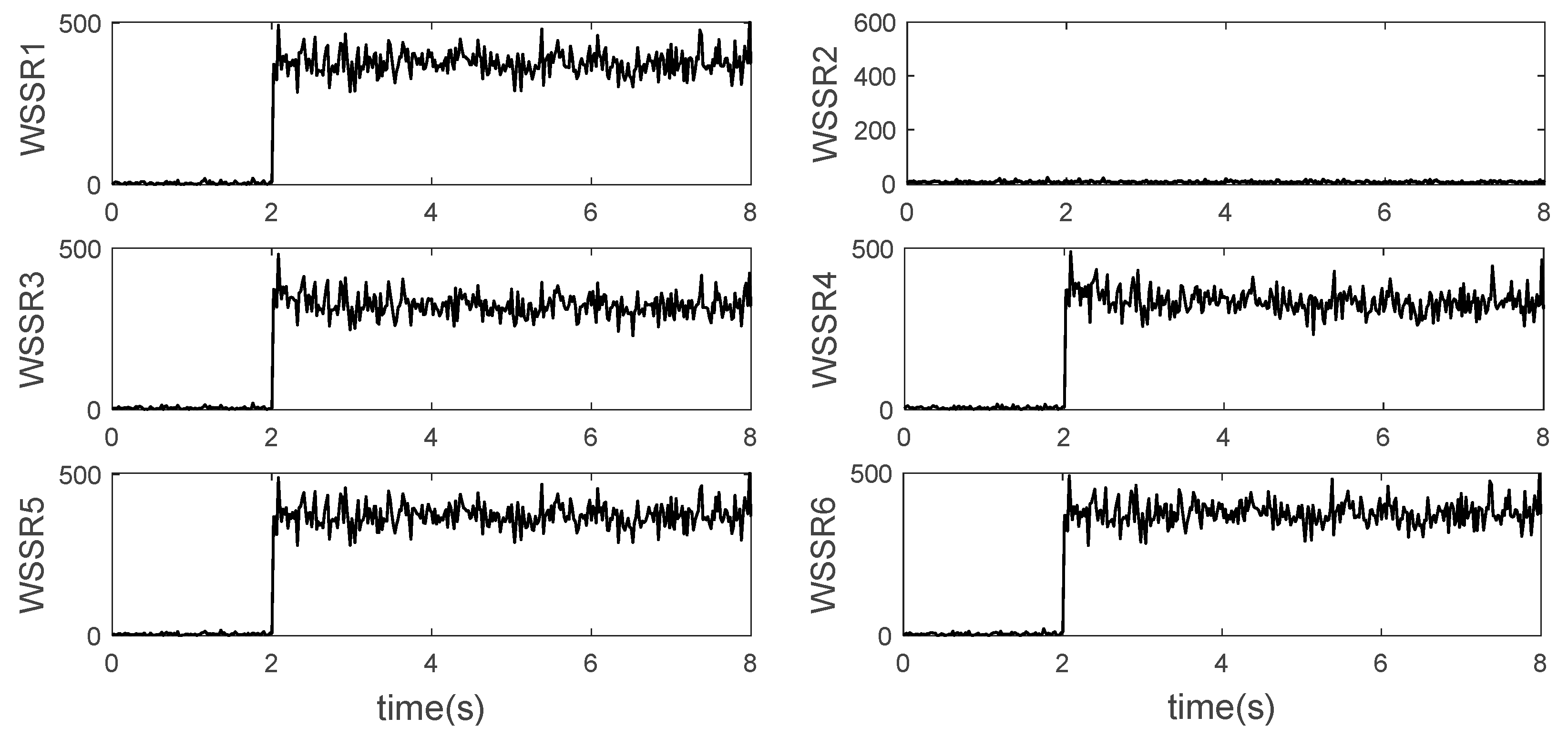
3.1. Single Sensor Fault
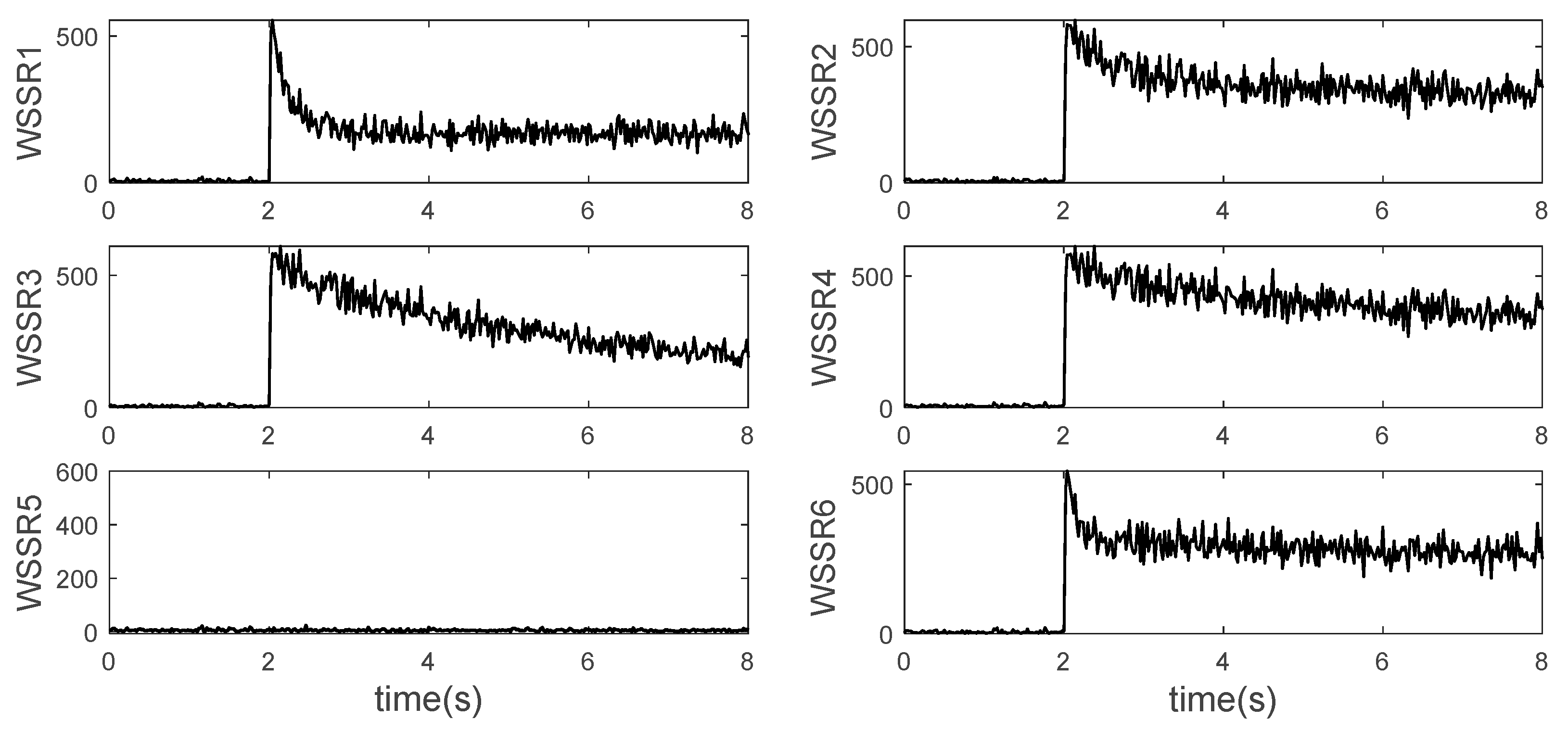
3.2. Dual Sensor Faults
4. Optimization Design of Acceleration Control Plan
4.1. Optimization Scheme of Control Plan Based on Target Shooting Method
- (1)
- Divide the fixed time interval [0, 1] into m equal parts to get the node: , where .
- (2)
- Parameterize the control quantity. Introduce a set of vectors where and define:where can be a constant value or some interpolation function.
- (3)
- Set up the initial value problem. A set of vectors is selected as an estimate of the state variables at the node . Then we have m initial value problems (IVP):where the initial value is:
- (4)
- Constituting Nonlinear Programming (NLP). The optimization objective is:where is the estimate of . The endpoints of each interval meet the matching conditions:
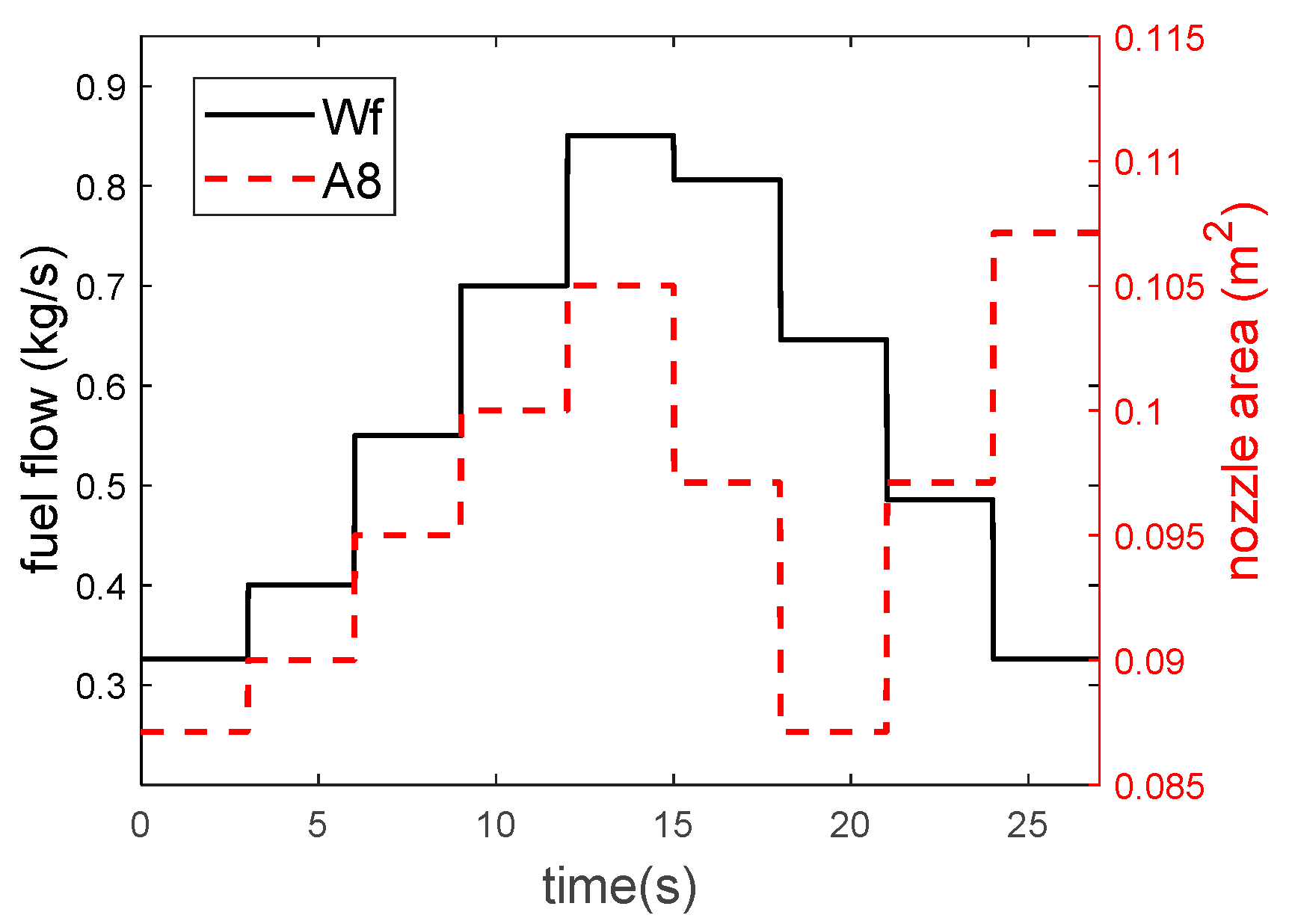
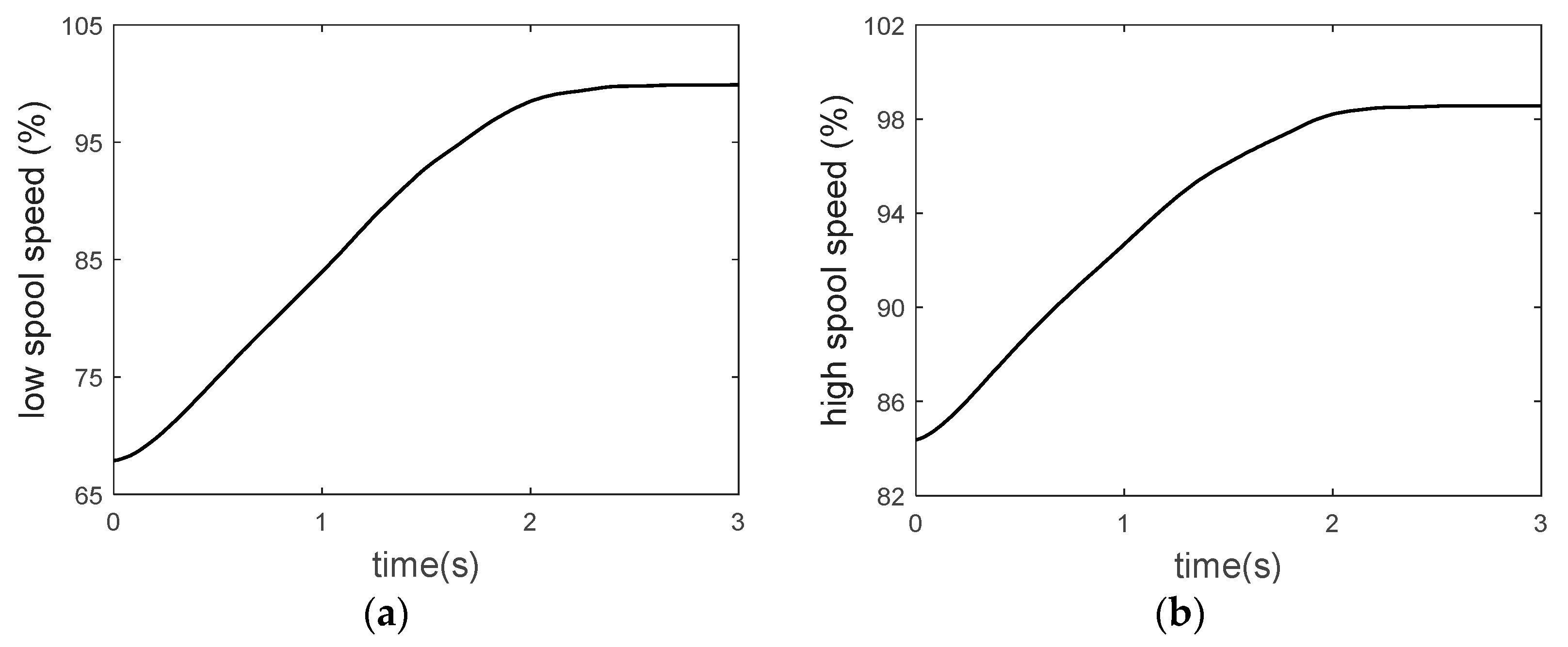
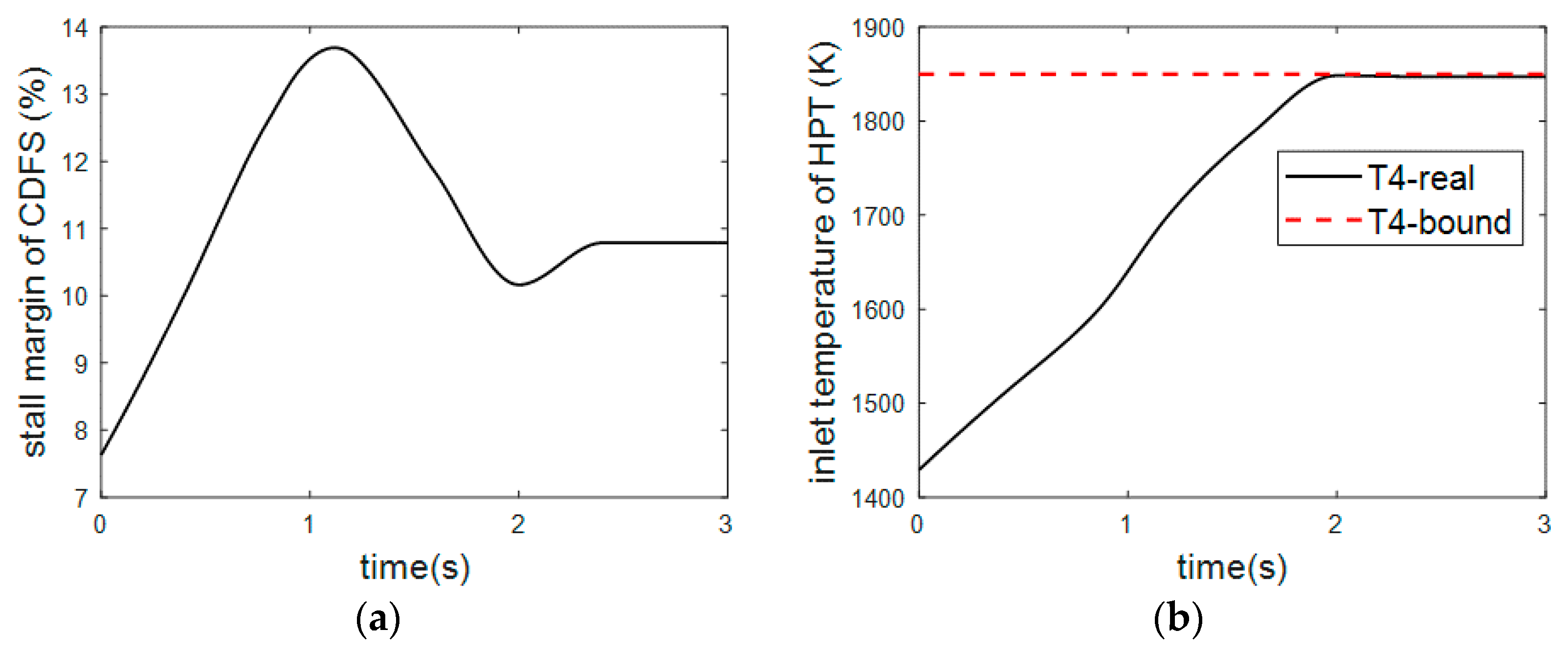
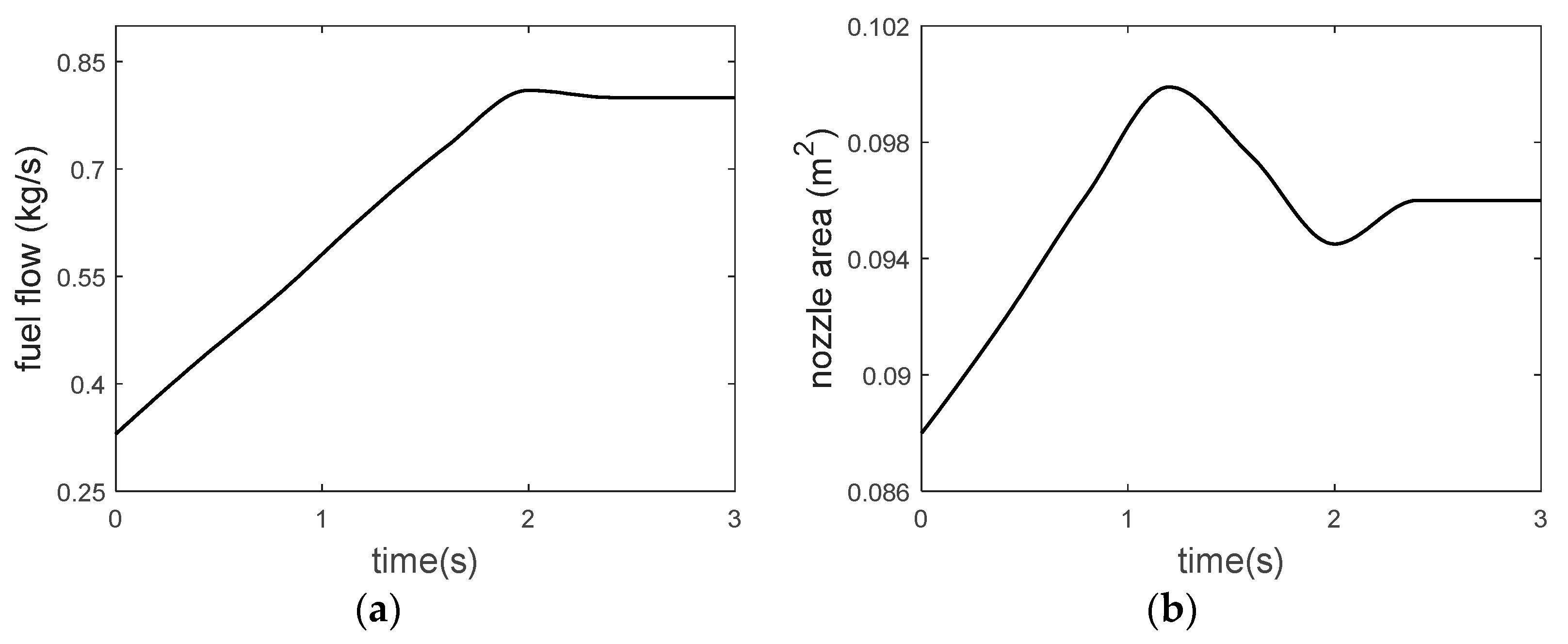
4.2. Accelerated Process Control Plan Design of VCE
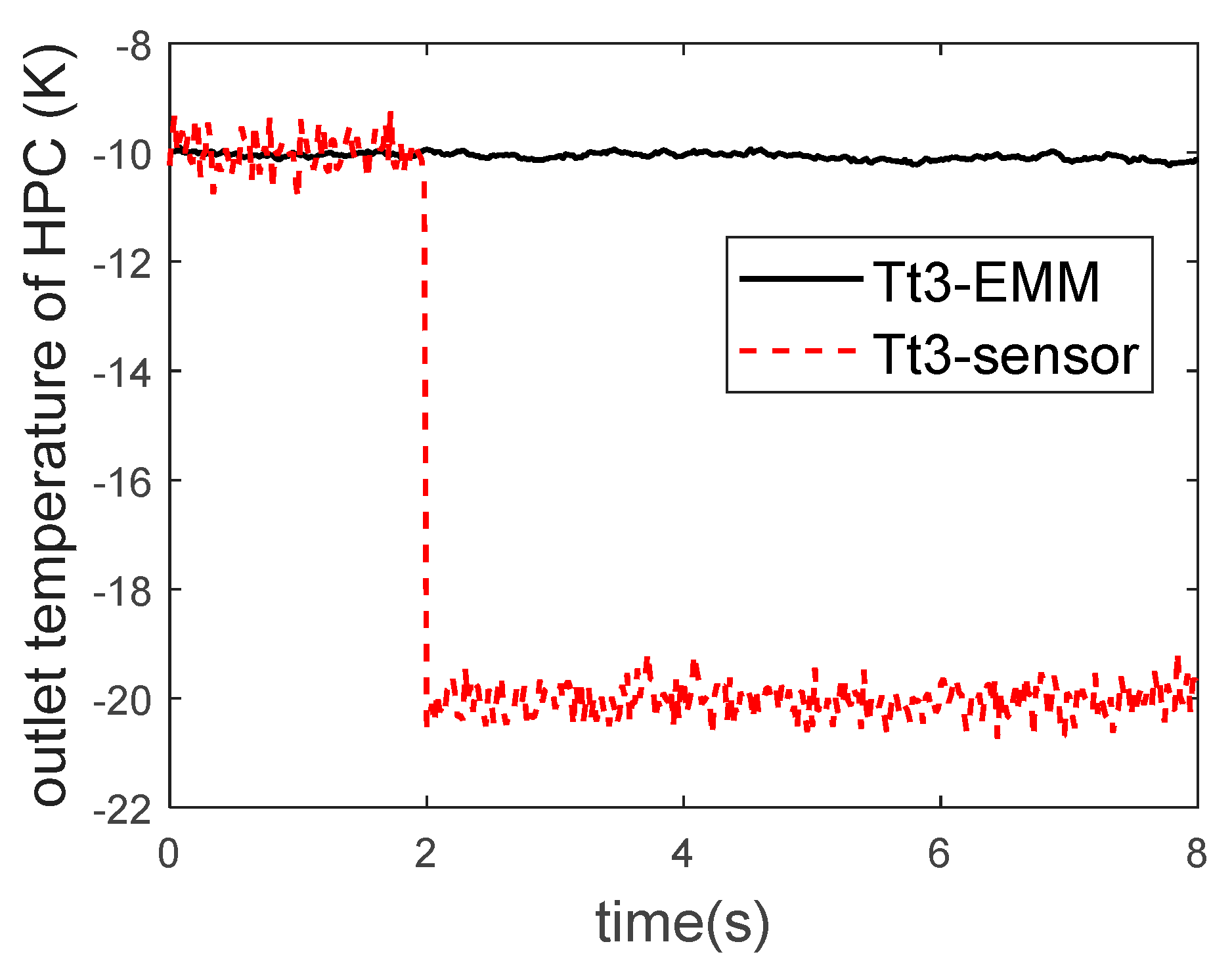
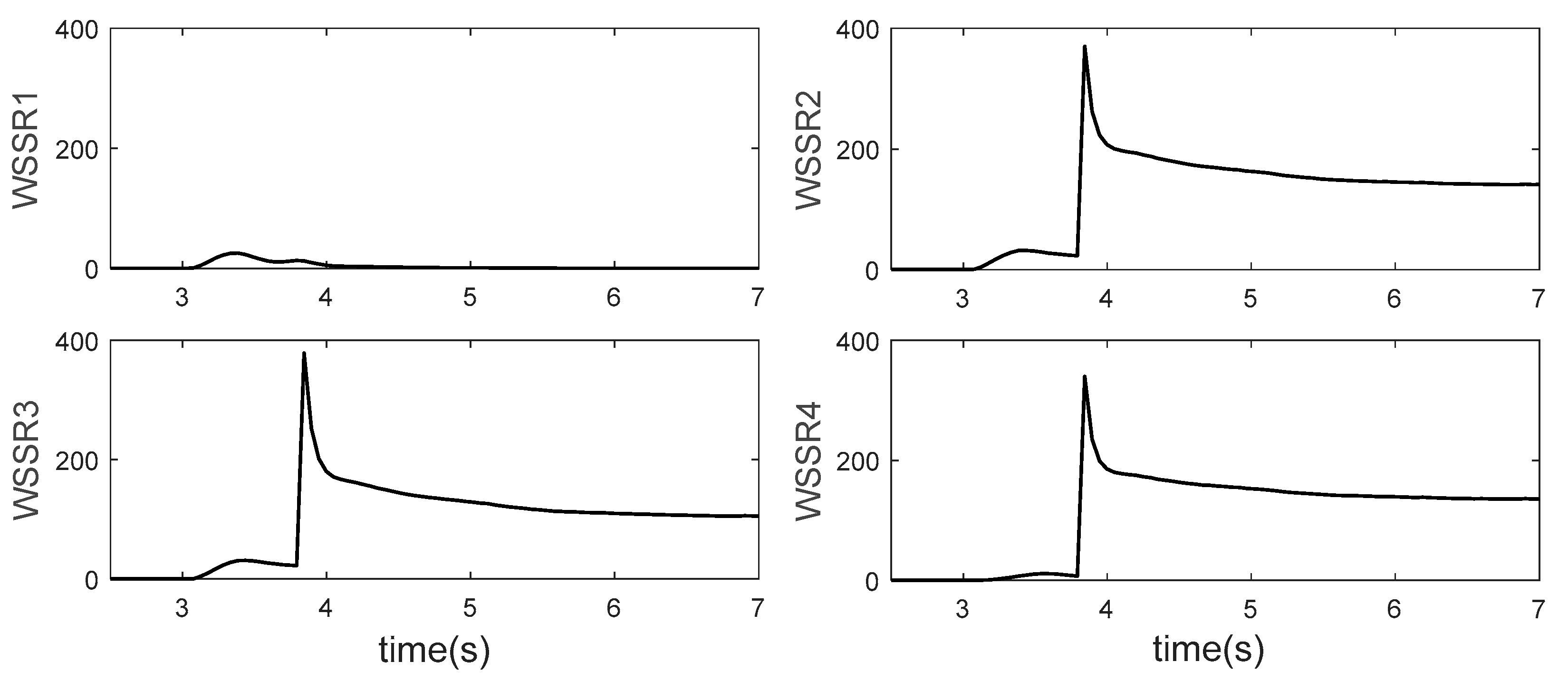
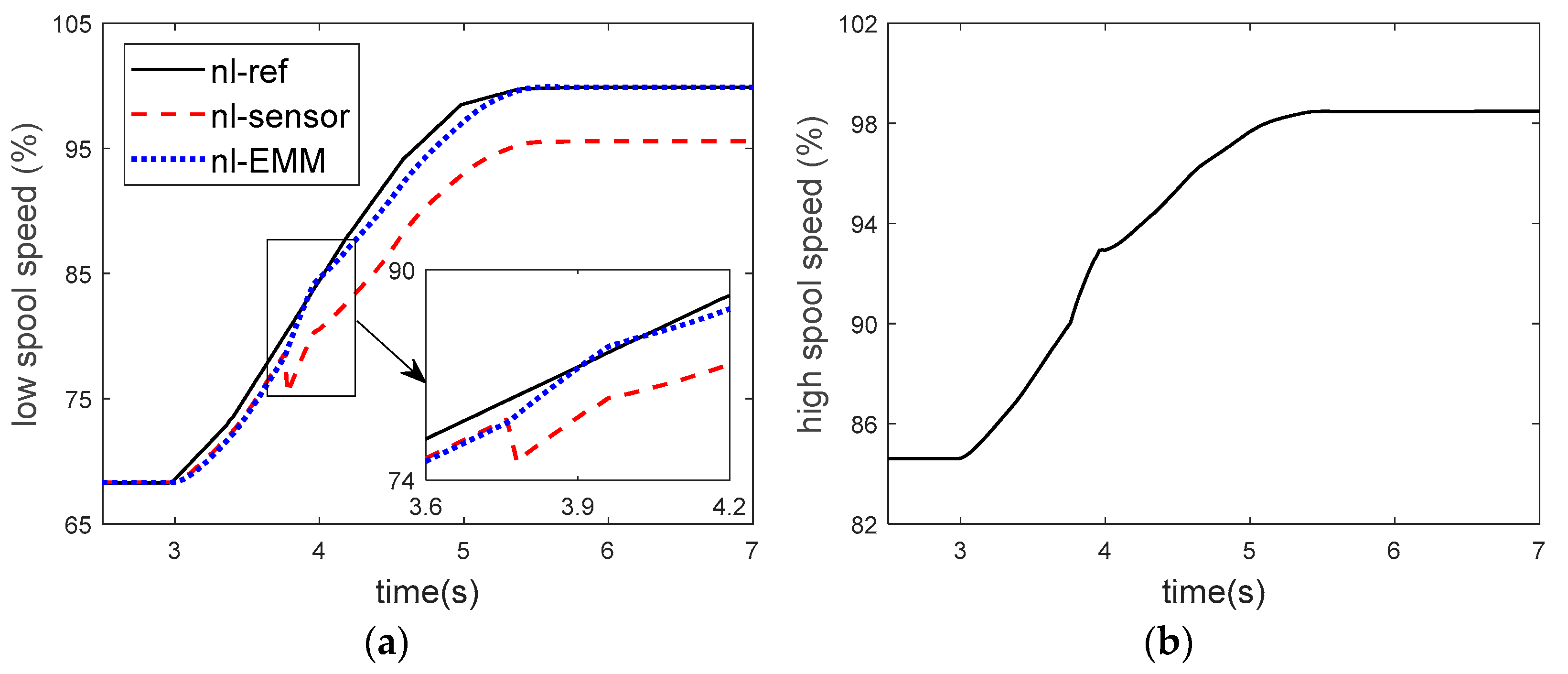
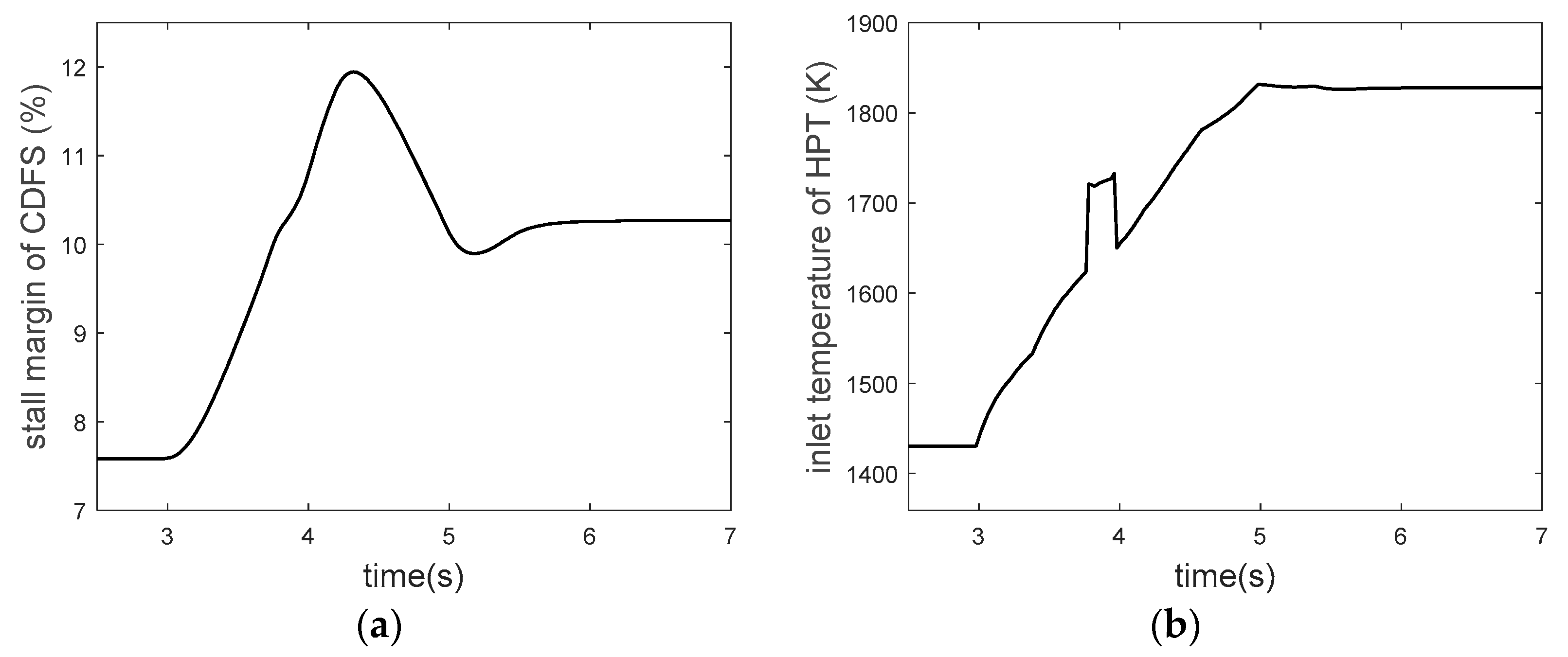
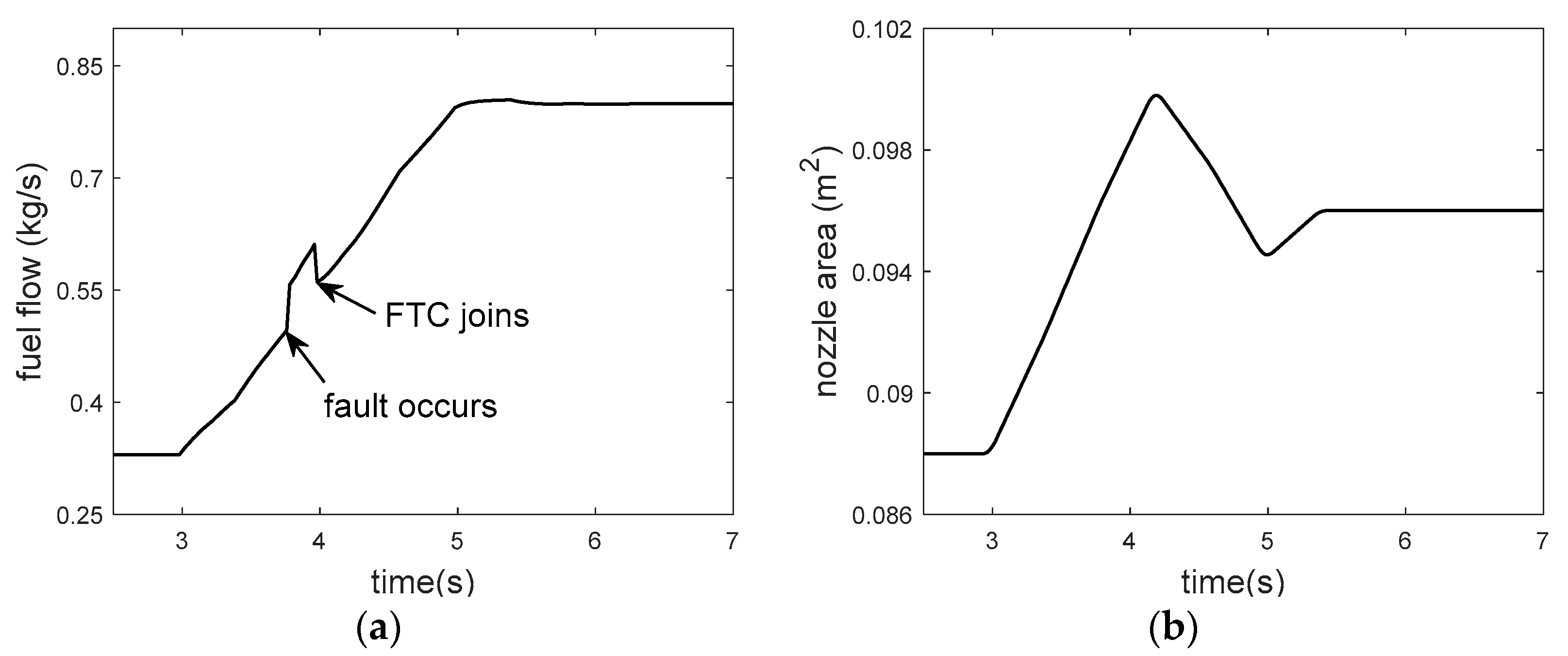
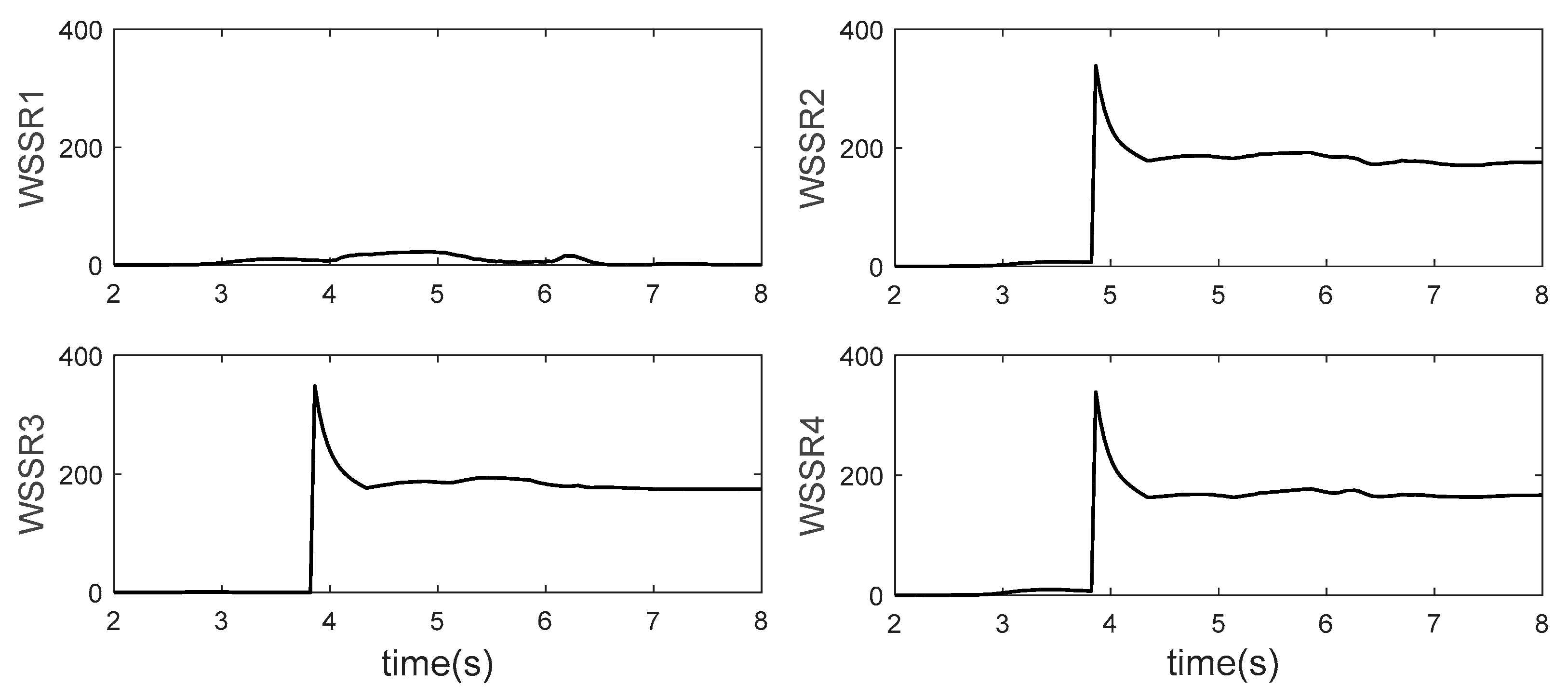
4.3. Sensor Fault Simulation
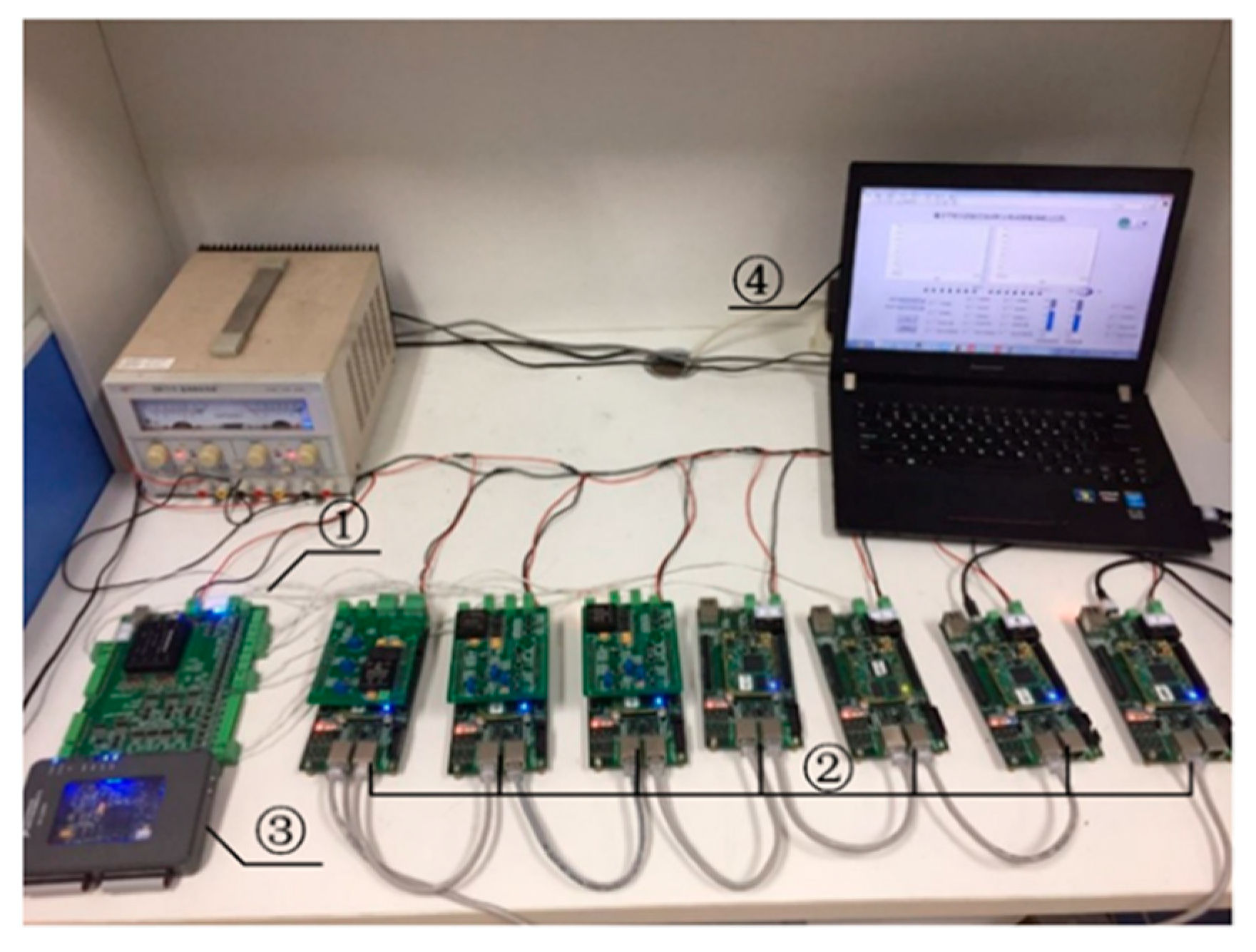
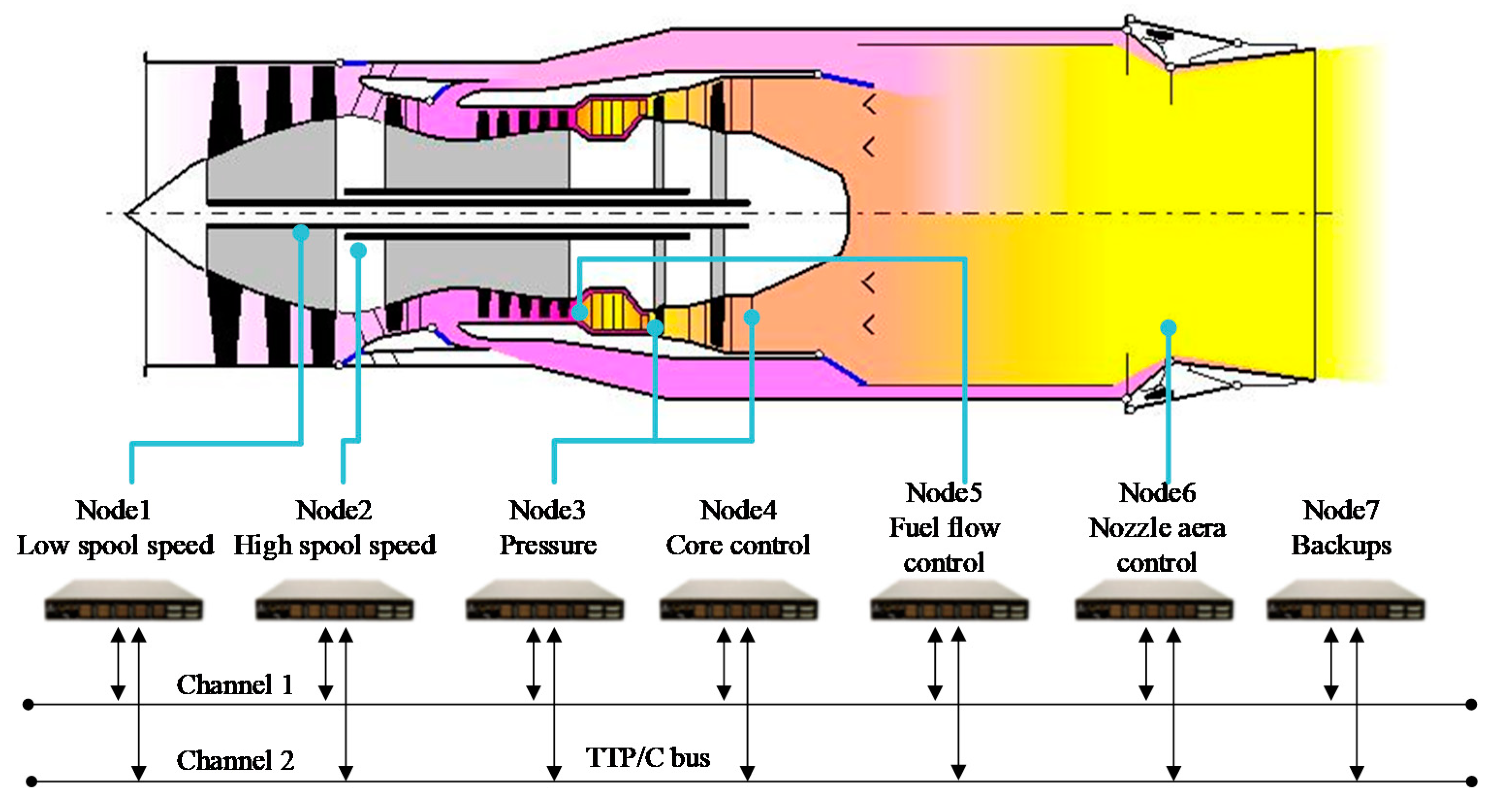
5. Hardware-in-the-Loop Simulation and Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hua, Y. Aero Engine Full Authority Digital Electronic Control System. In A Treatise on Electricity and Magnetism, 3rd ed.; Air China Media: Beijing, China, 2014. [Google Scholar]
- Baocheng, H. Application of simulation model of sensors to analysis fault of control system of turbojet engine. Propuls. Technol. 2001, 22, 364–367. [Google Scholar]
- Wallhagen, R.E.; Arpasi, D.J. Self-Teaching Digital-Computer Program for Fail-Operational Control of a Turbojet Engine in a Sea-Level Test Stand; No. NASA-TM-X-3043; National Aeronautics and Space Administatioin: Washington, DC, USA, 1974. [Google Scholar]
- Brown, H.; Vizzini, R.W. Analytical Redundancy Technology for Engine Reliability Improvement. SAE Aerosp. Technol. Conf. Expo. 1986, 95, 973–983. [Google Scholar] [CrossRef]
- Merrill, W.C.; DeLaat, J.C.; Bruton, W.M. Advanced detection, isolation, and accommodation of sensor failures—Real-time evaluation. J. Guid. Control Dyn. 1988, 11, 517–526. [Google Scholar] [CrossRef] [Green Version]
- Duyar, A.; Eldem, V.; Merrill, W.; Guo, T.-H. Fault detection and diagnosis in propulsion systems—A fault parameter estimation approach. J. Guid. Control Dyn. 1994, 17, 104–108. [Google Scholar] [CrossRef]
- Dewallef, P.; Léonard, O. Online validation of measurements on jet engines using automatic learning methods. In Proceedings of the 15th ISABE Conference, Bangalore, India, 3–7 September 2001; pp. 1–8. [Google Scholar]
- Mattern, D.L.; Jaw, L.C.; Guo, T.H.; Graham, R.; Mccoy, W. Using neural networks for sensor validation. In Proceedings of the 34th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Cleveland, OH, USA, 13–15 July 1998; p. 3547. [Google Scholar]
- Huang, X.-H. Sensor Fault Diagnosis and Reconstruction of Engine Control System Based on Autoassociative Neural Network. Chin. J. Aeronaut. 2004, 17, 23–27. [Google Scholar] [CrossRef] [Green Version]
- Yang, Q.; Wang, J. Multi-Level Wavelet Shannon Entropy-Based Method for Single-Sensor Fault Location. Entropy 2015, 17, 7101–7117. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Li, Y.; Qiu, T. A method for sensor fault diagnosis based on wavelet transform and neural network. Qinghua Daxue Xuebao/J. Tsinghua Univ. 2013, 53, 205–209. [Google Scholar]
- Chen, Y.S.; Jiang, S.D.; Liu, X.D.; Yang, J.L.; Wang, Q. Self-validating gas sensor fault diagnosis method based on EEMD sample entropy and SRC. Syst. Eng. Electron. 2016. [Google Scholar] [CrossRef]
- Liu, T.T.; Na, W.B.; He, N.; Li, M. Sensor Fault Detection Method Based on RBF Neural Network. Coal Mine Mach. 2017. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, Q.; Liu, S.; Sheng, H. Intelligent Fault-Tolerant Control System Design and Semi-Physical Simulation Validation of Aero-Engine. IEEE Access 2020, 8, 217204–217212. [Google Scholar] [CrossRef]
- Yu, D.R.; Sui, Y.F. Expansion model based on equilibrium manifold for nonlinear system. J. Syst. Simul. 2006, 18, 2415–2418. [Google Scholar]
- Zhao, H.; Niu, J.; Jiang, Y.F.; Da-Ren, Y.U. Linear Modeling of Aero Engines Based on Balanced Manifold Model. J. Propuls. Technol. 2011, 32, 377–382. [Google Scholar]
- Lu, C.K. Research on Multivariable Control of Turbofan Engine Based on Equilibrium Manifold Model. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2019. [Google Scholar]
- Gou, X.Z.; Zhou, W.X.; Huang, J.Q. Component-level modeling technology for variable cycle engine. J. Aerosp. Power 2013, 28, 104–111. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Before the Acceleration Process | After the Acceleration Process |
|---|---|---|
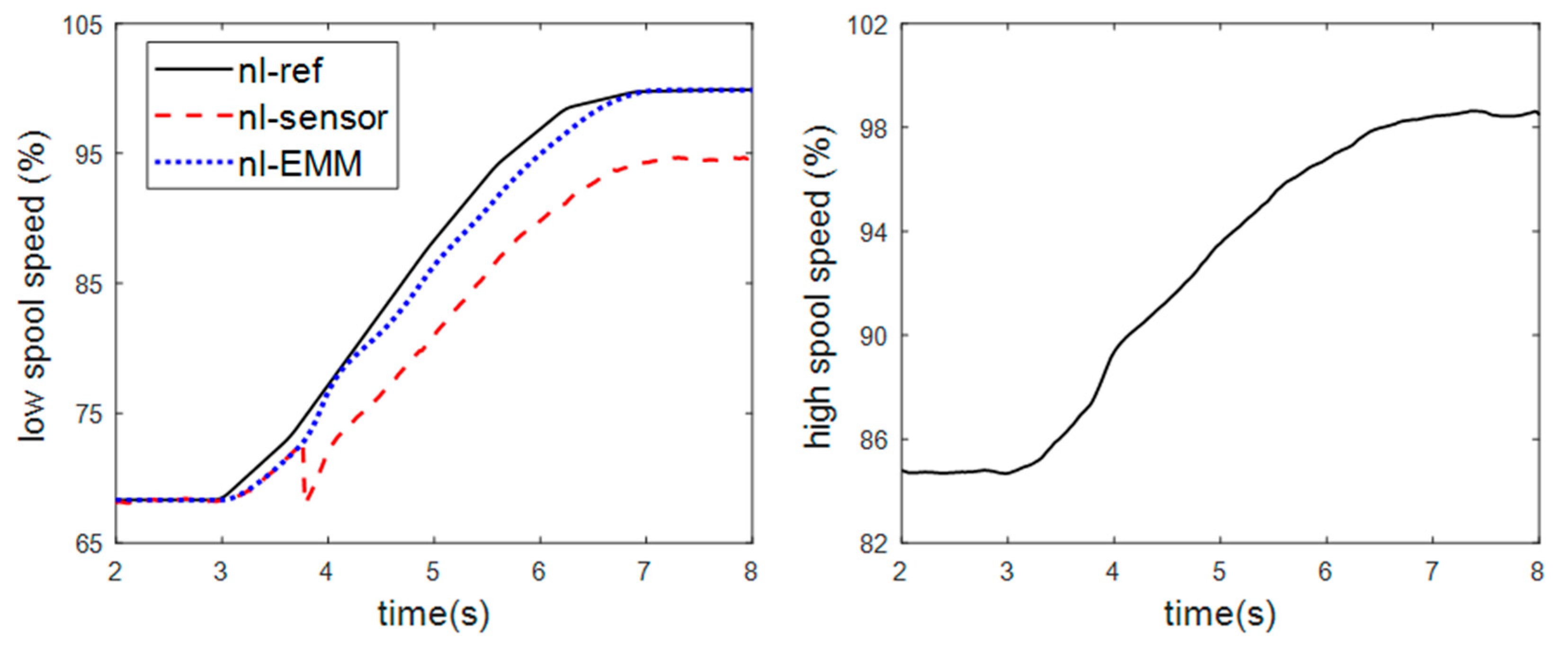
| Low spool speed (%) | 67.87 | 99.9 |
| High spool speed (%) | 84.37 | 98.5 |
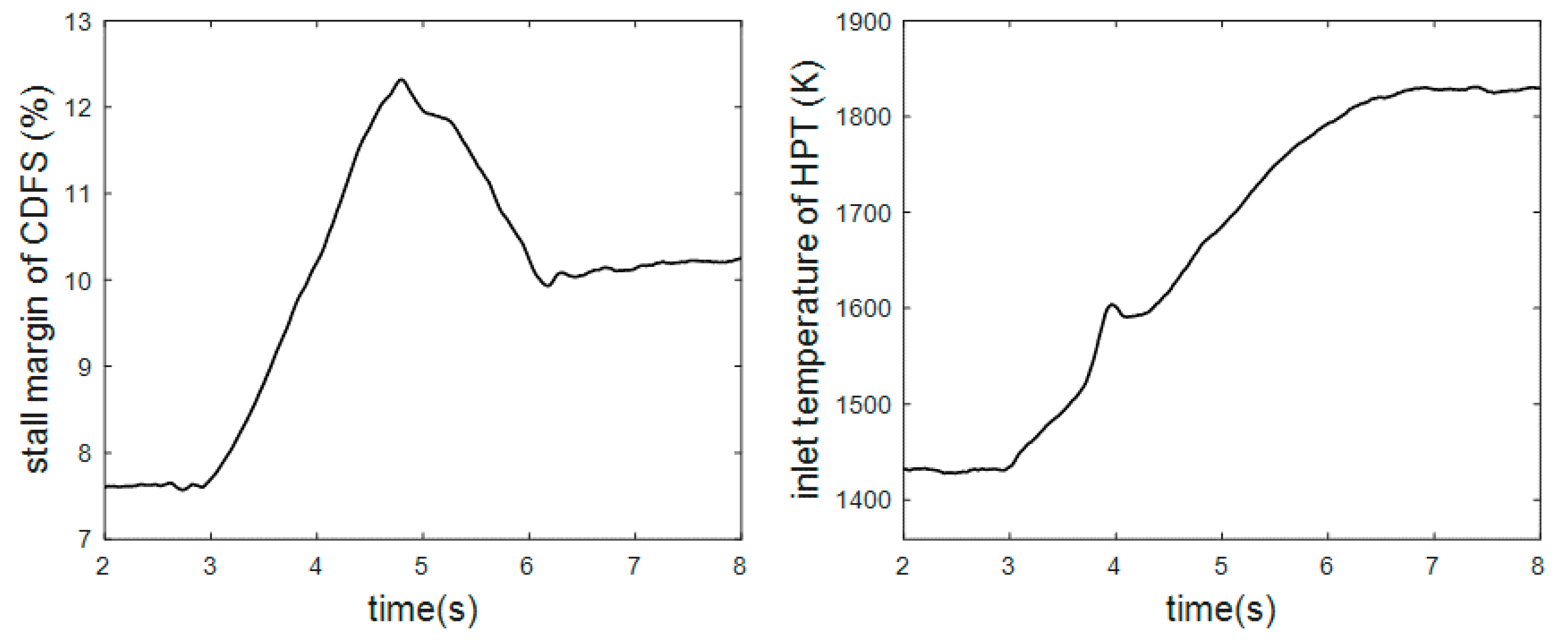
| Stall margin of CDFS (%) | 7.62 | 10.13 |
| Inlet temperature of HPT (K) | 1435.25 | 1823.69 |
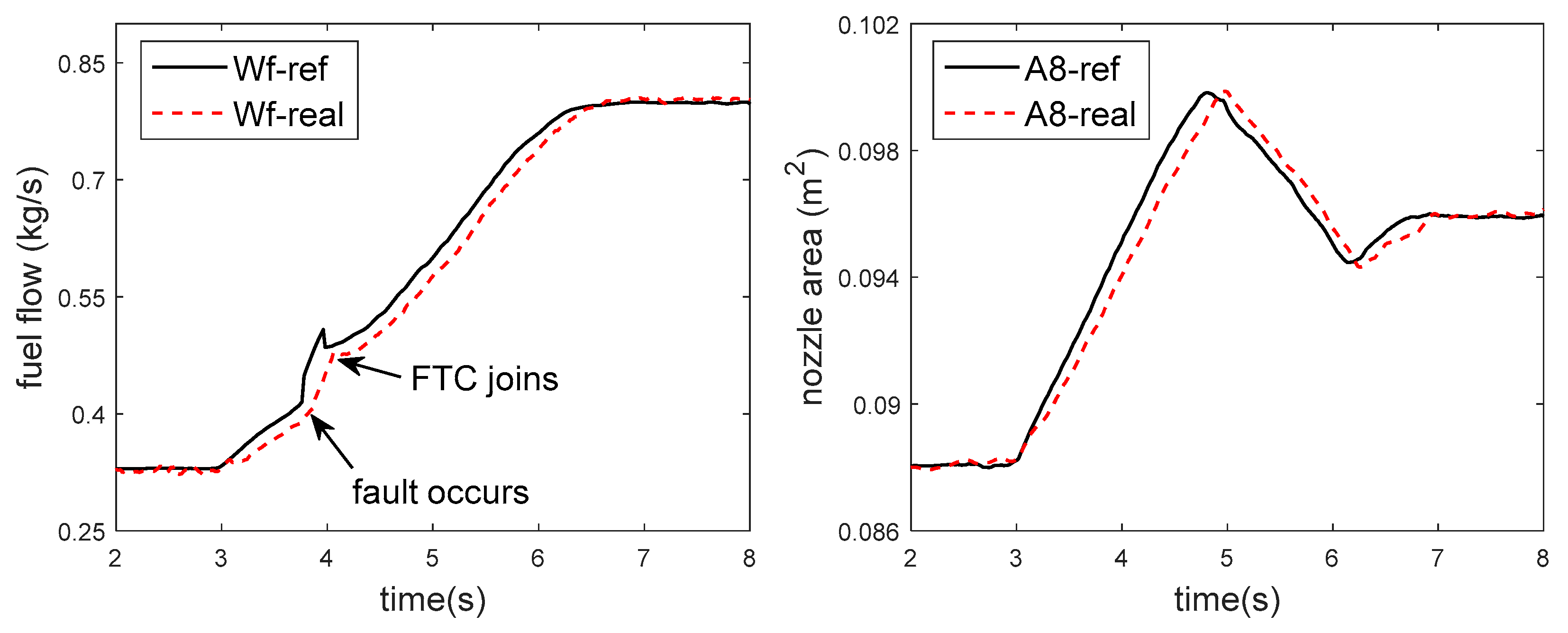
| Fuel flow (kg/s) | 0.33 | 0.80 |
| High spool speed (%) | 84.37 | 98.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Yuan, Y.; Zhang, X.; Wu, S.; Zhang, T. Fault-Tolerant Control Scheme for the Sensor Fault in the Acceleration Process of Variable Cycle Engine. Appl. Sci. 2022, 12, 2085. https://doi.org/10.3390/app12042085
Li L, Yuan Y, Zhang X, Wu S, Zhang T. Fault-Tolerant Control Scheme for the Sensor Fault in the Acceleration Process of Variable Cycle Engine. Applied Sciences. 2022; 12(4):2085. https://doi.org/10.3390/app12042085
Chicago/Turabian StyleLi, Lingwei, Yuan Yuan, Xinglong Zhang, Songwei Wu, and Tianhong Zhang. 2022. "Fault-Tolerant Control Scheme for the Sensor Fault in the Acceleration Process of Variable Cycle Engine" Applied Sciences 12, no. 4: 2085. https://doi.org/10.3390/app12042085
APA StyleLi, L., Yuan, Y., Zhang, X., Wu, S., & Zhang, T. (2022). Fault-Tolerant Control Scheme for the Sensor Fault in the Acceleration Process of Variable Cycle Engine. Applied Sciences, 12(4), 2085. https://doi.org/10.3390/app12042085