
Changes in Propeller Shaft Behavior by Fluctuating Propeller Forces during Ship Turning





Abstract
1. Introduction
2. Approaches Adopted
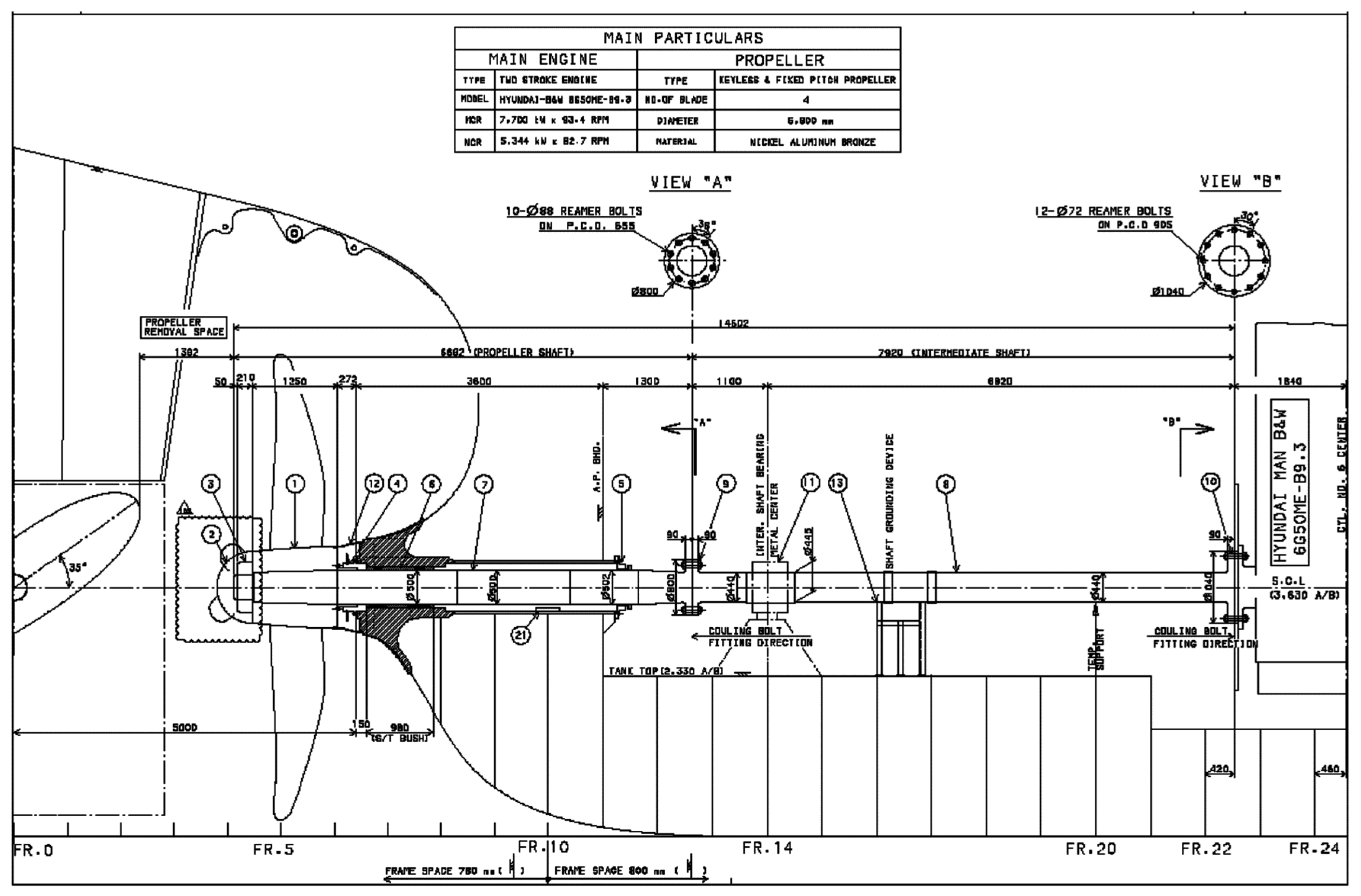
2.1. Ship Description
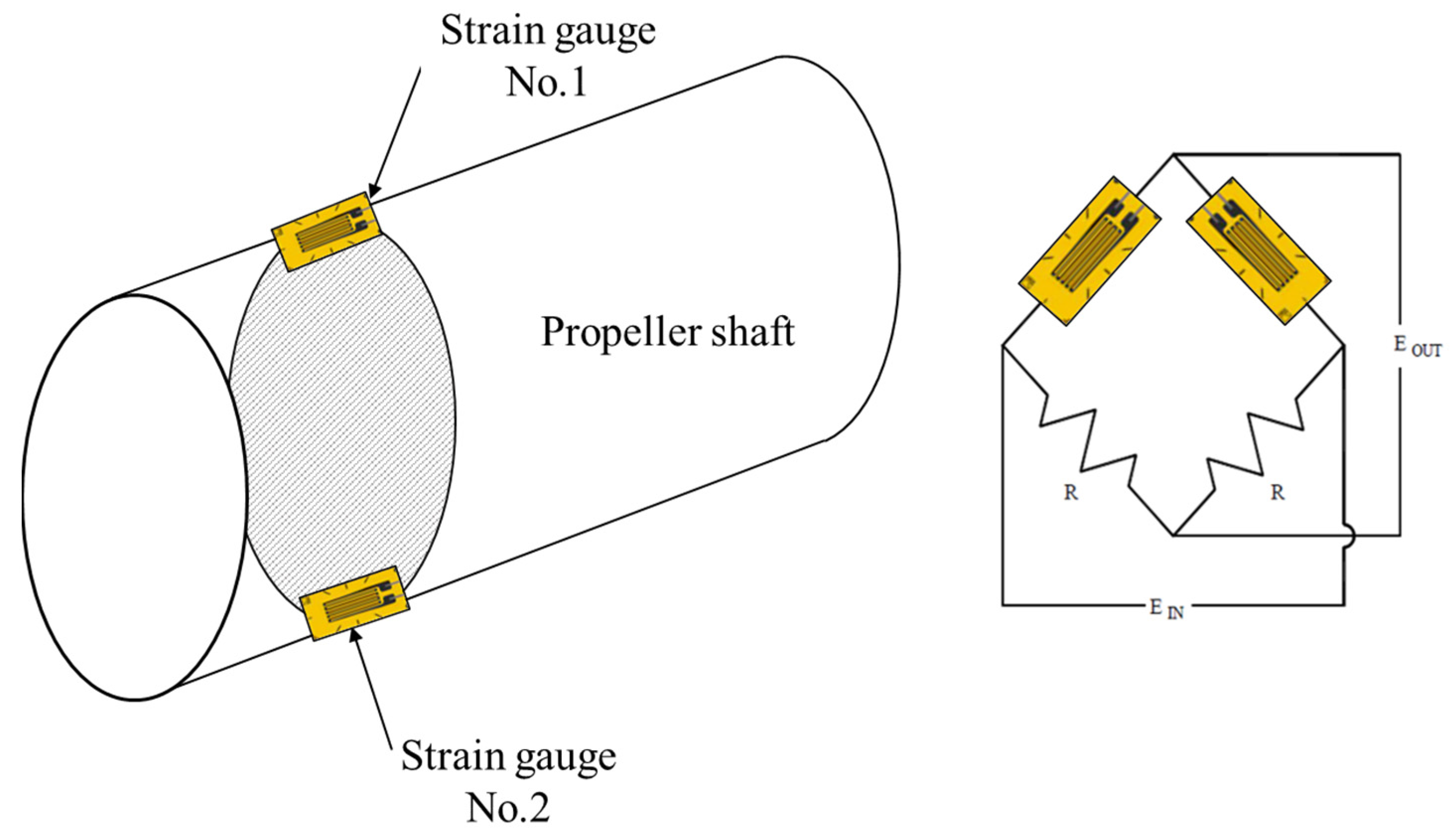
2.2. Introduction to the Strain Gauge Method
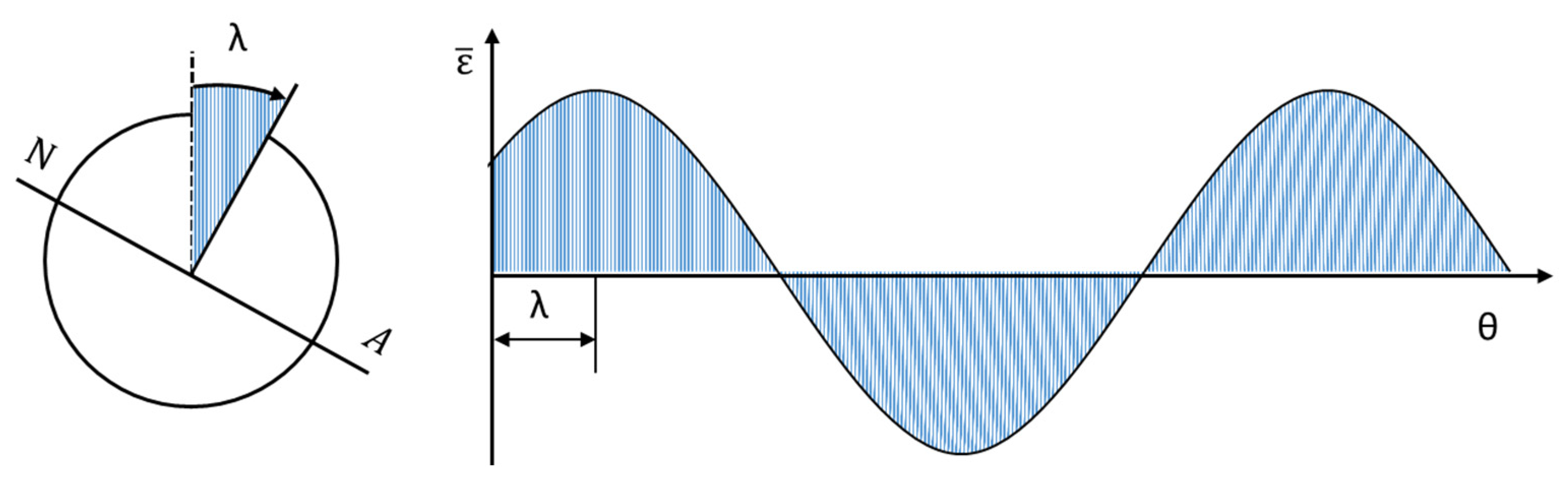
- is the strain amplitude, ,
- is the angle between the vertical direction and the gauge,
- is the angle between the normal to neutral axis and the vertical direction or bending angle, and
- is the average strain.
- is the strain amplitude,
- is the bending moment of the shaft,
- E is Young’s modulus,
- is the second moment of the shaft’s cross-section, and
- is the radius of the shaft’s cross-section.
- Z is the section modulus of the shaft.
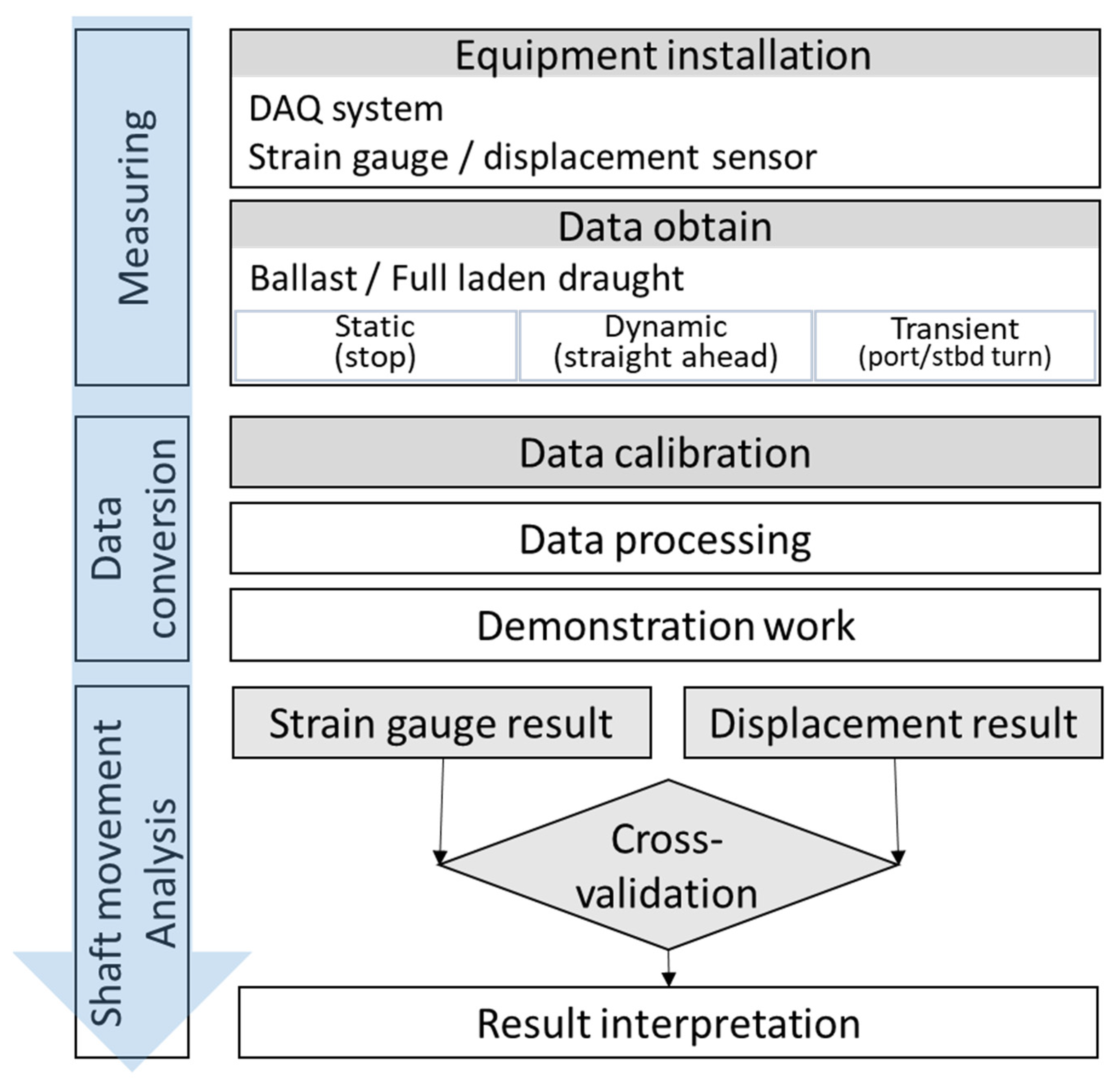
2.3. Measurement and Data Analysis Procedures
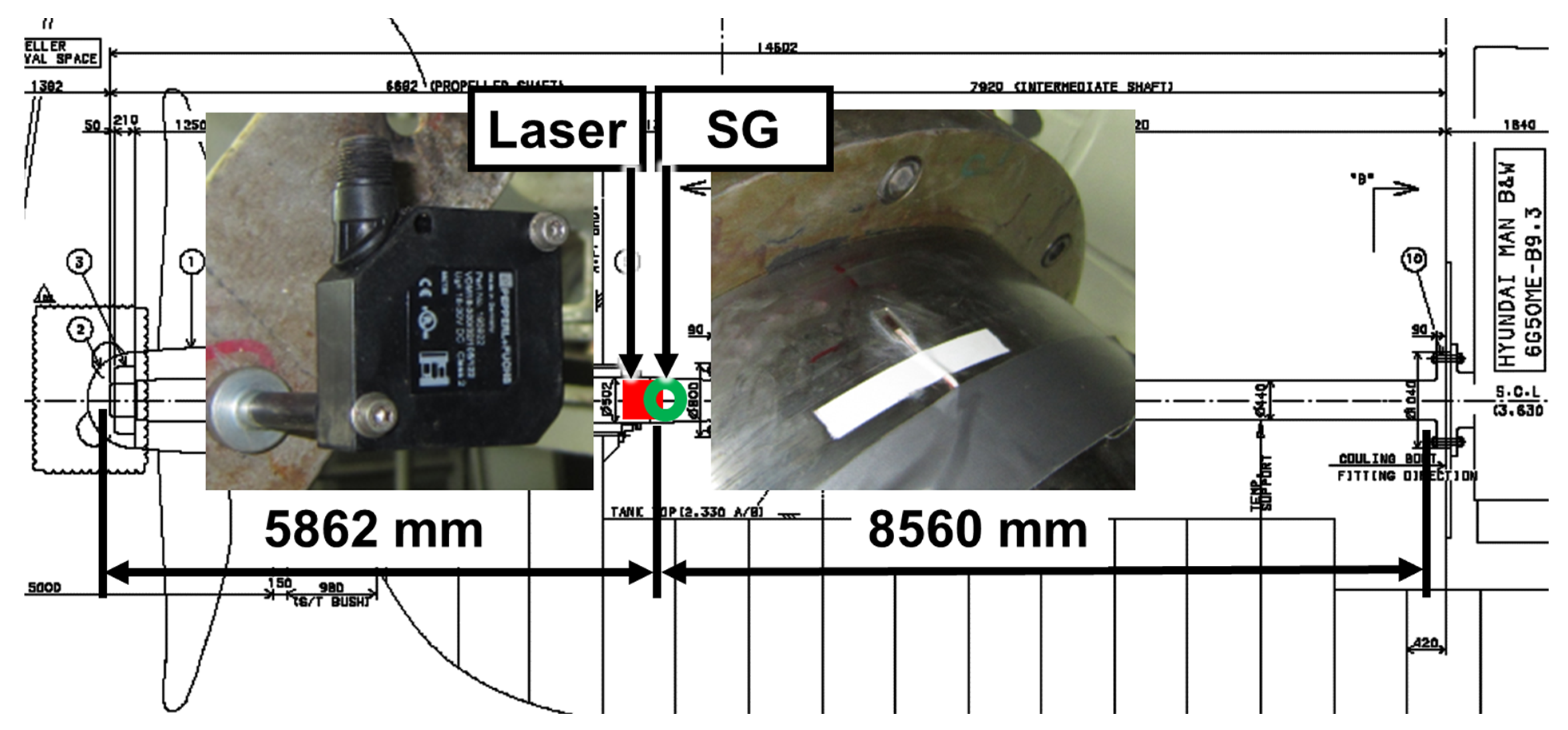
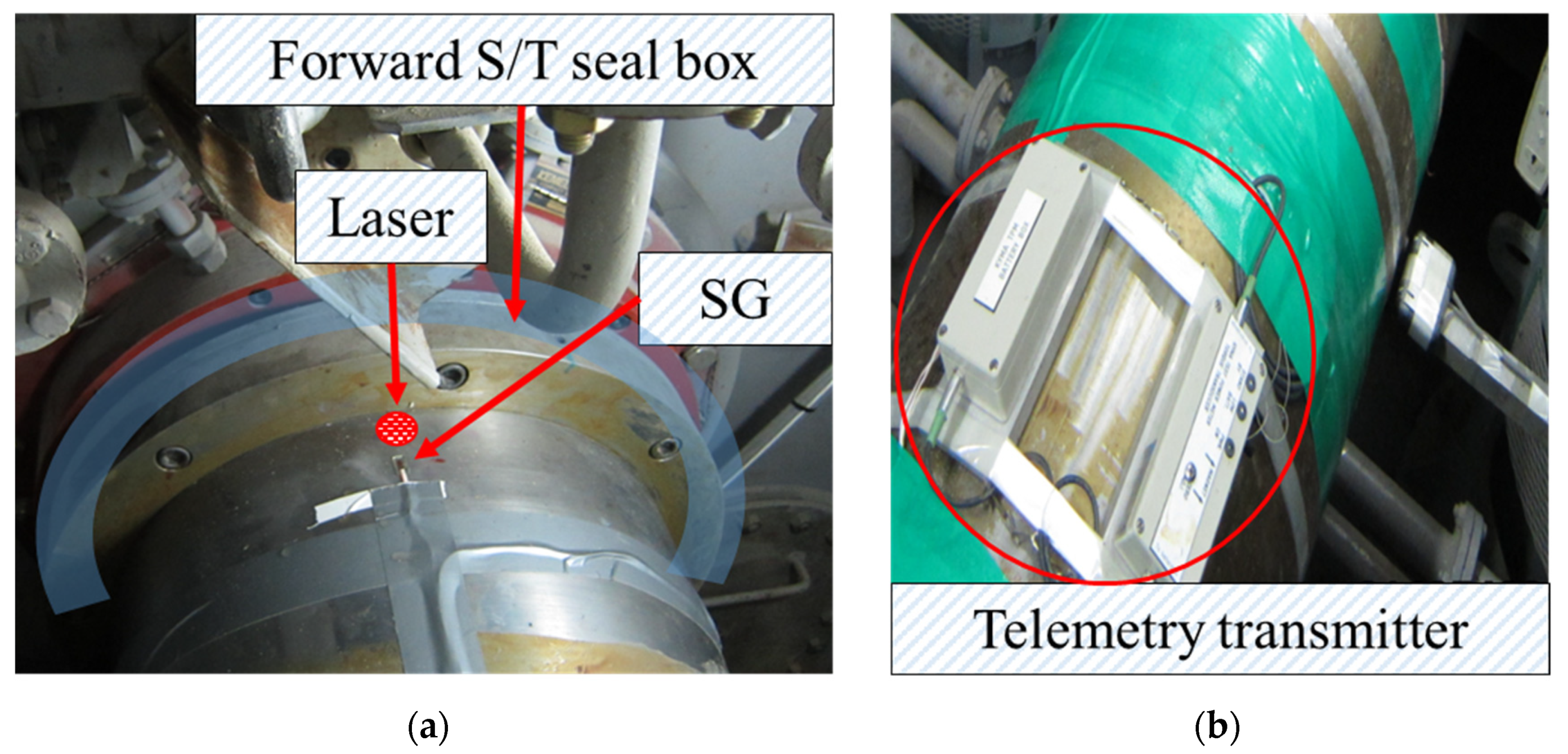
2.3.1. Configuration
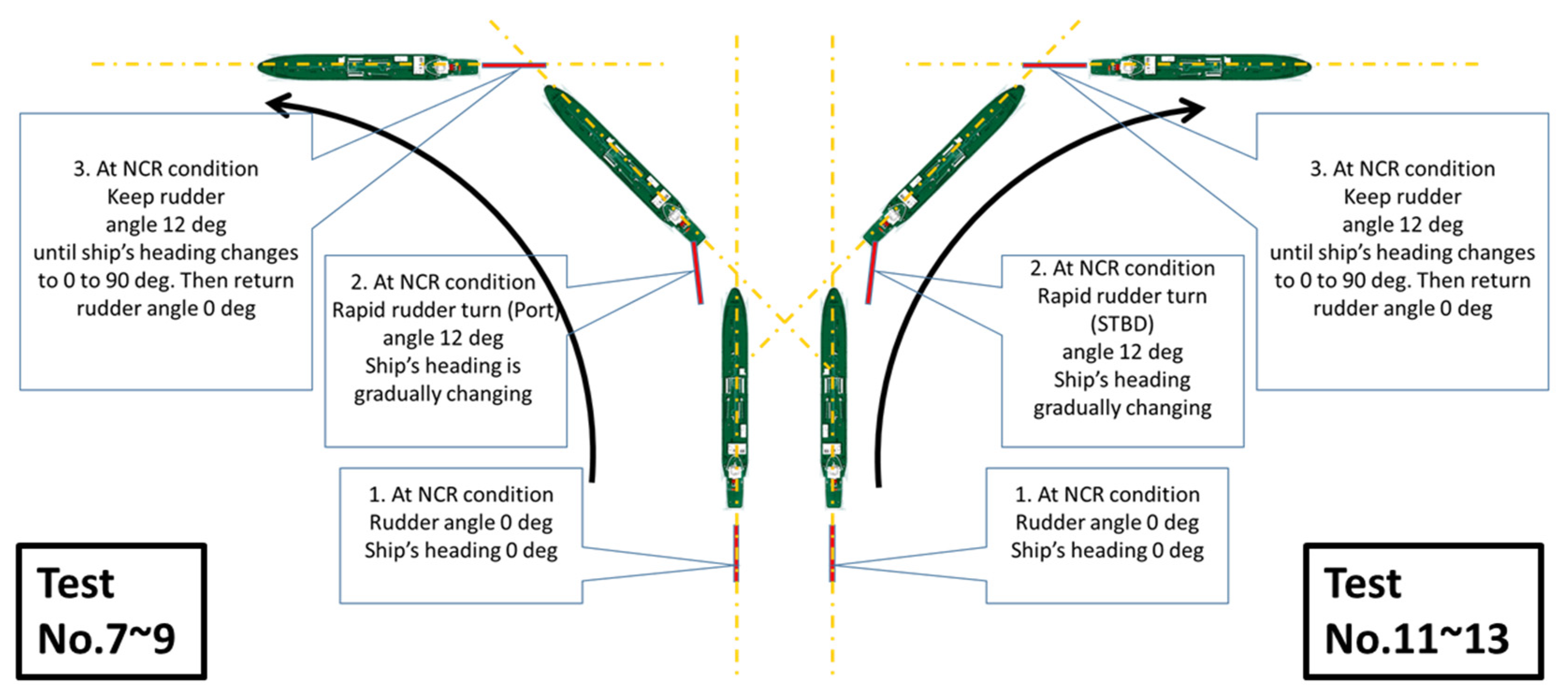
2.3.2. Measurement Procedures
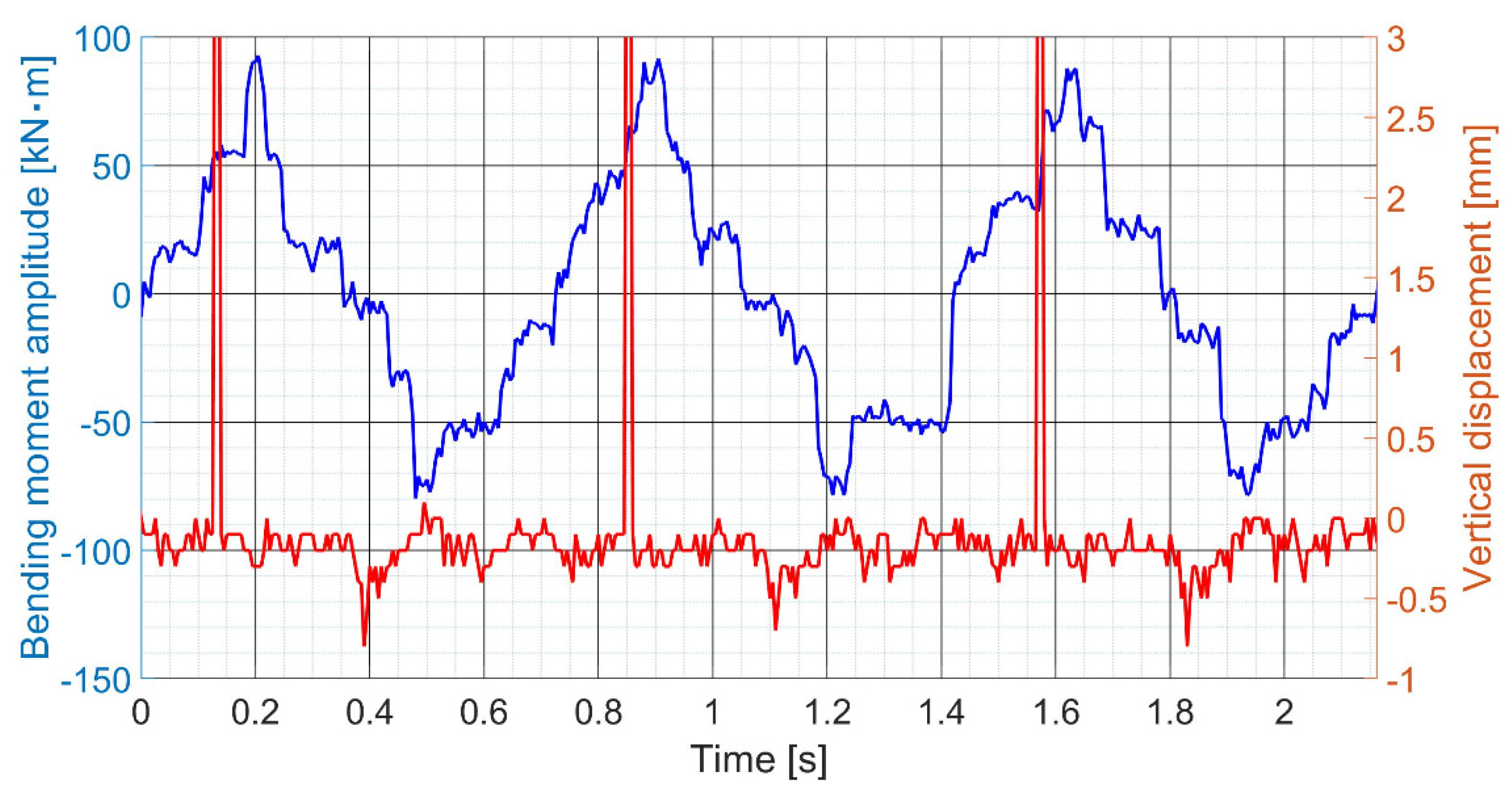
2.3.3. Processing of Raw Signals
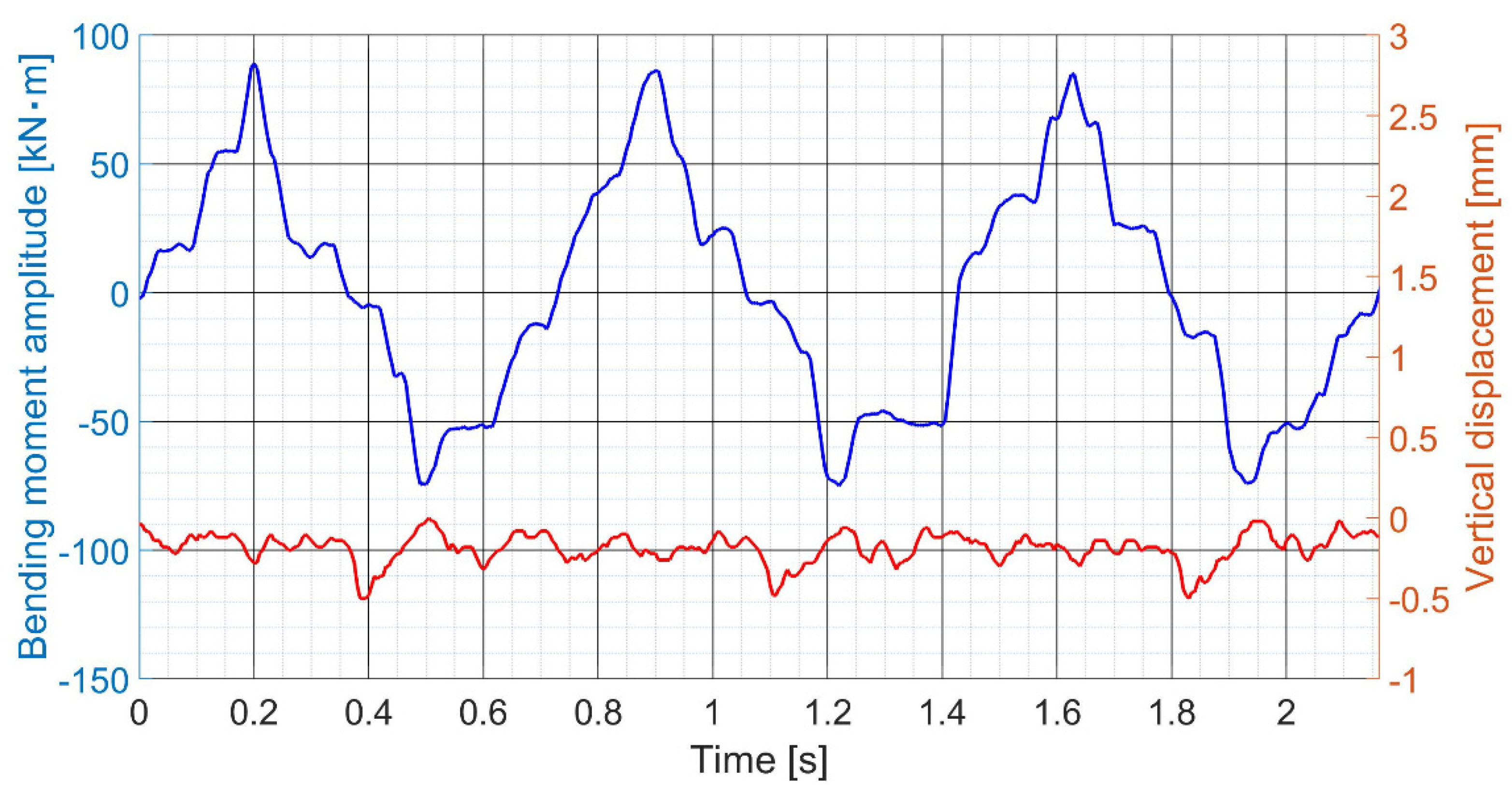
- Read the local bending moment directly from the measured strain during one revolution;
- Determine the maximum and minimum values;
- Obtain the bending moment as half of the peak-to-peak amplitude ((max − min)/2) as described in Equation (5).
3. Results
3.1. Fully Laden (FL) Condition
3.2. Normal Ballast (NB) Condition
4. Discussion
4.1. Eccentric Propeller Thrust Fluctuations
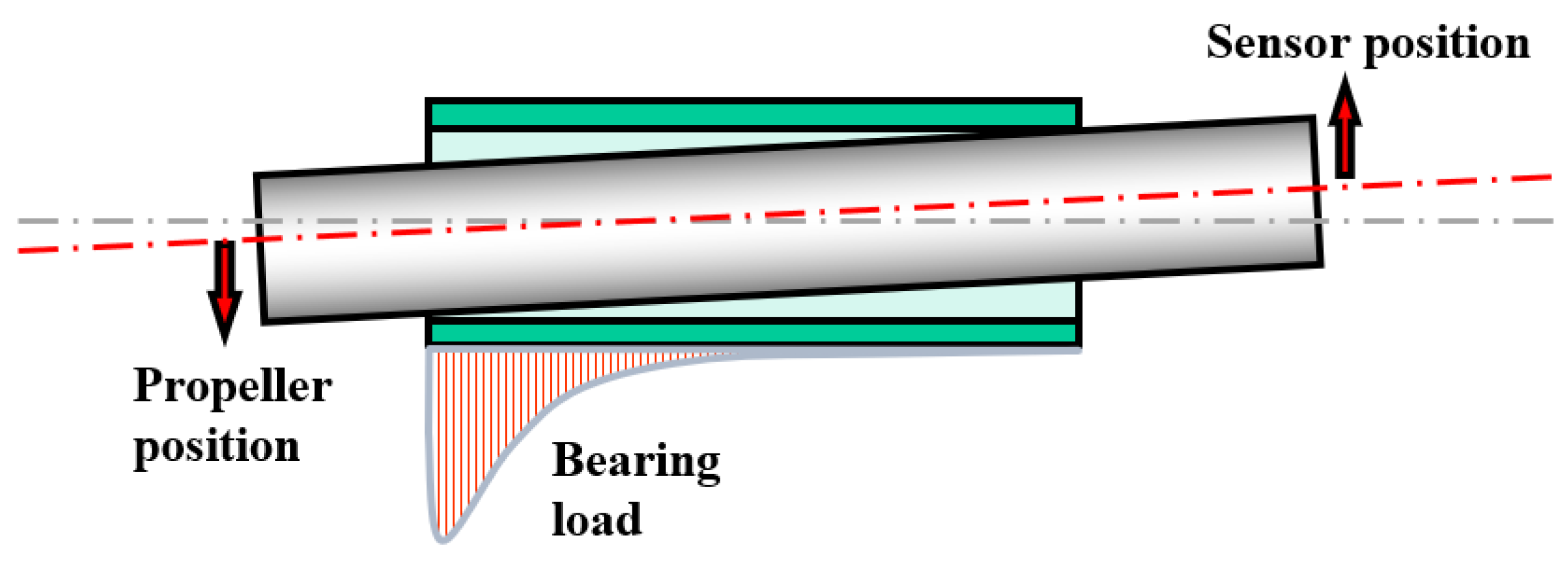
4.2. Correlation between Sensor Position and Propeller Thrust Force Generating Position
5. Conclusions
- (1)
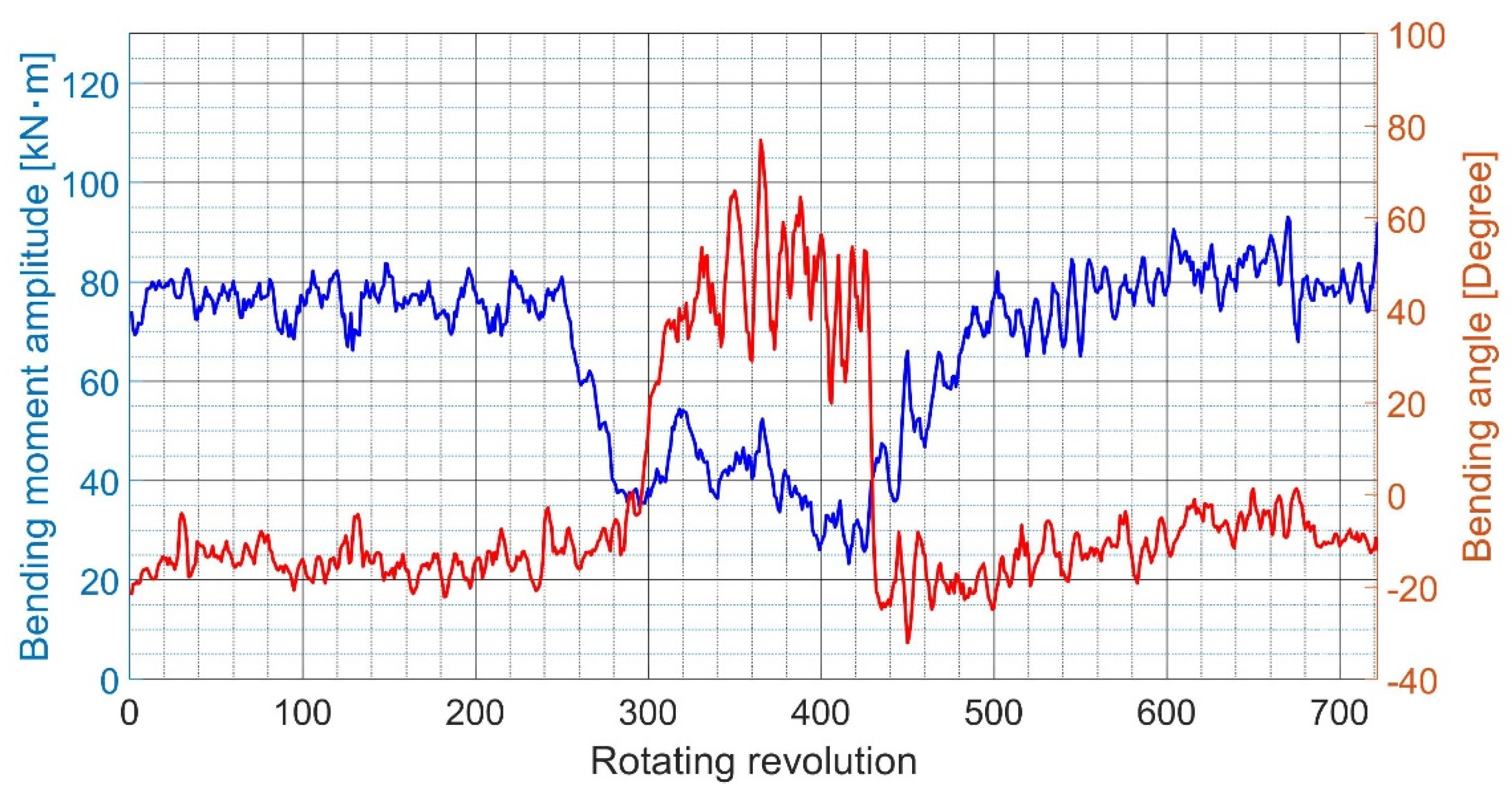
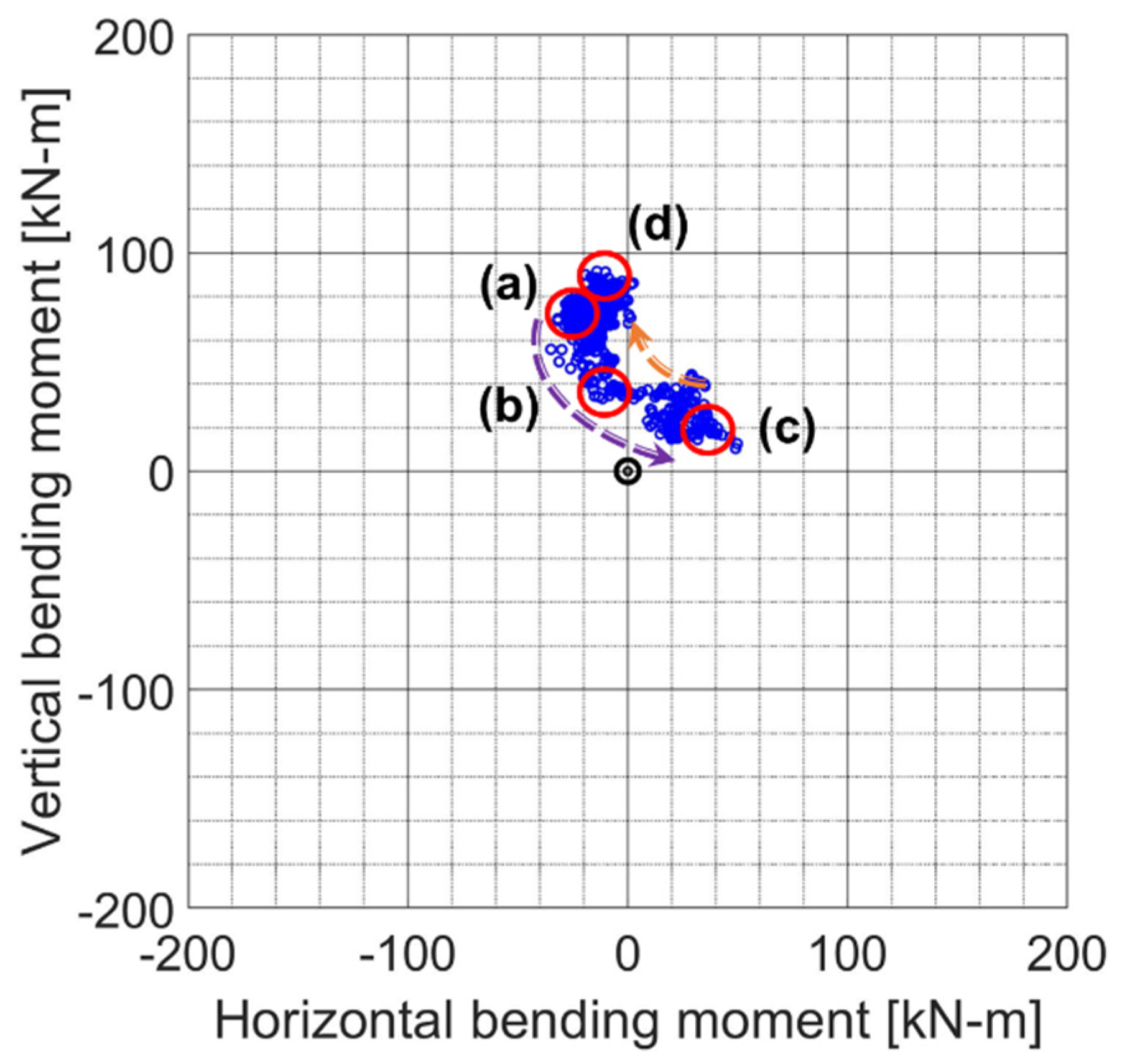
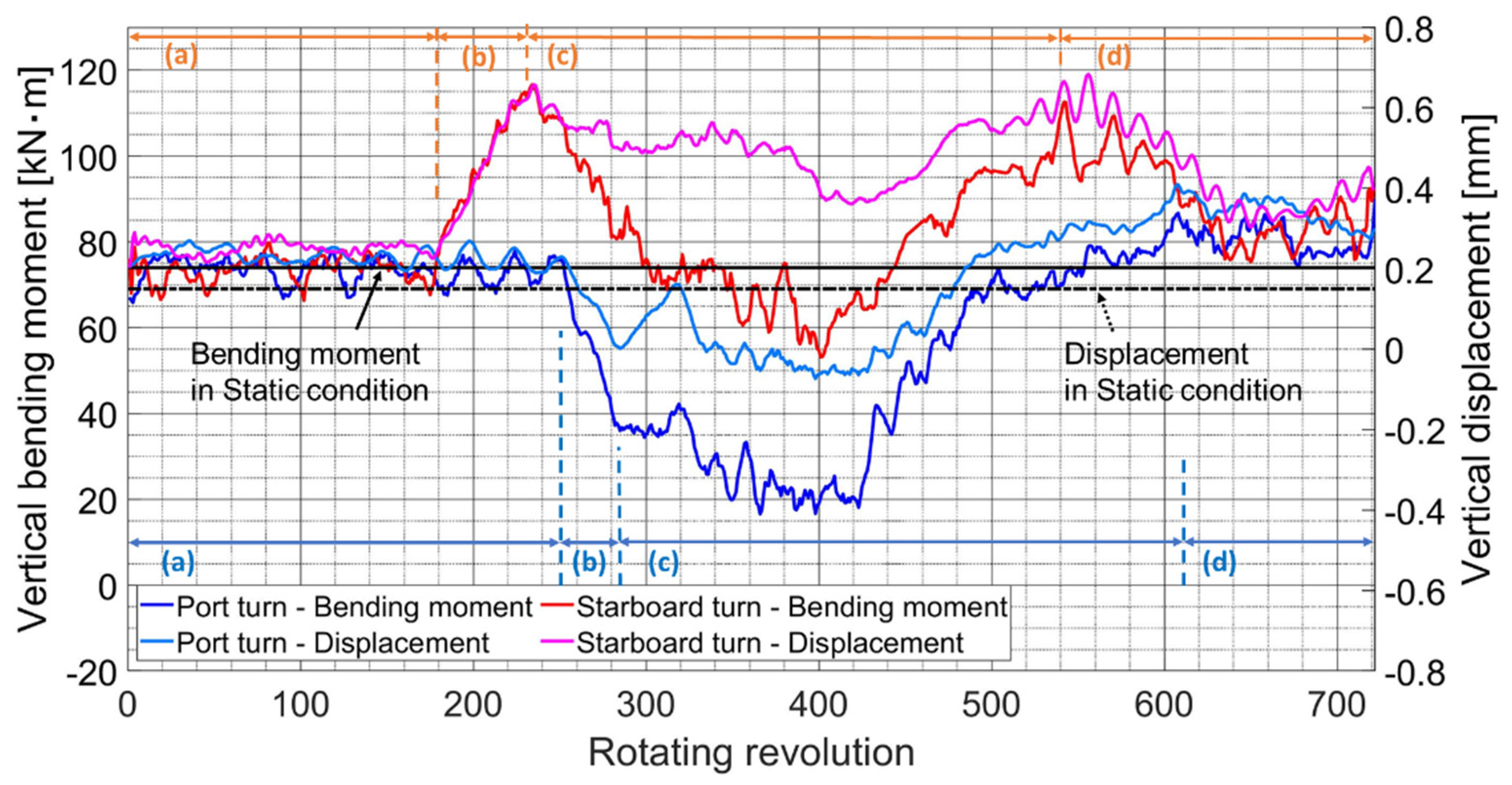
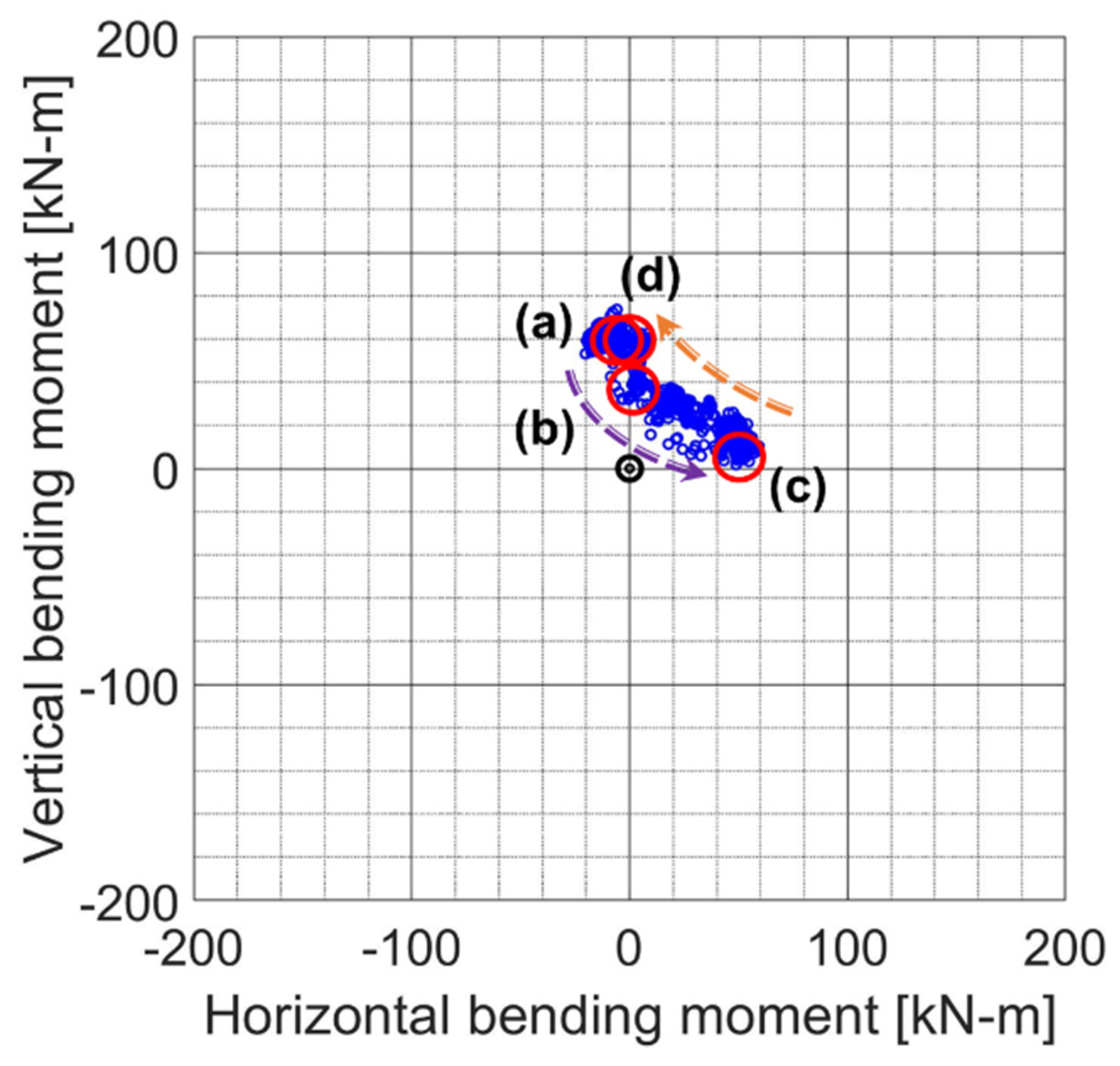
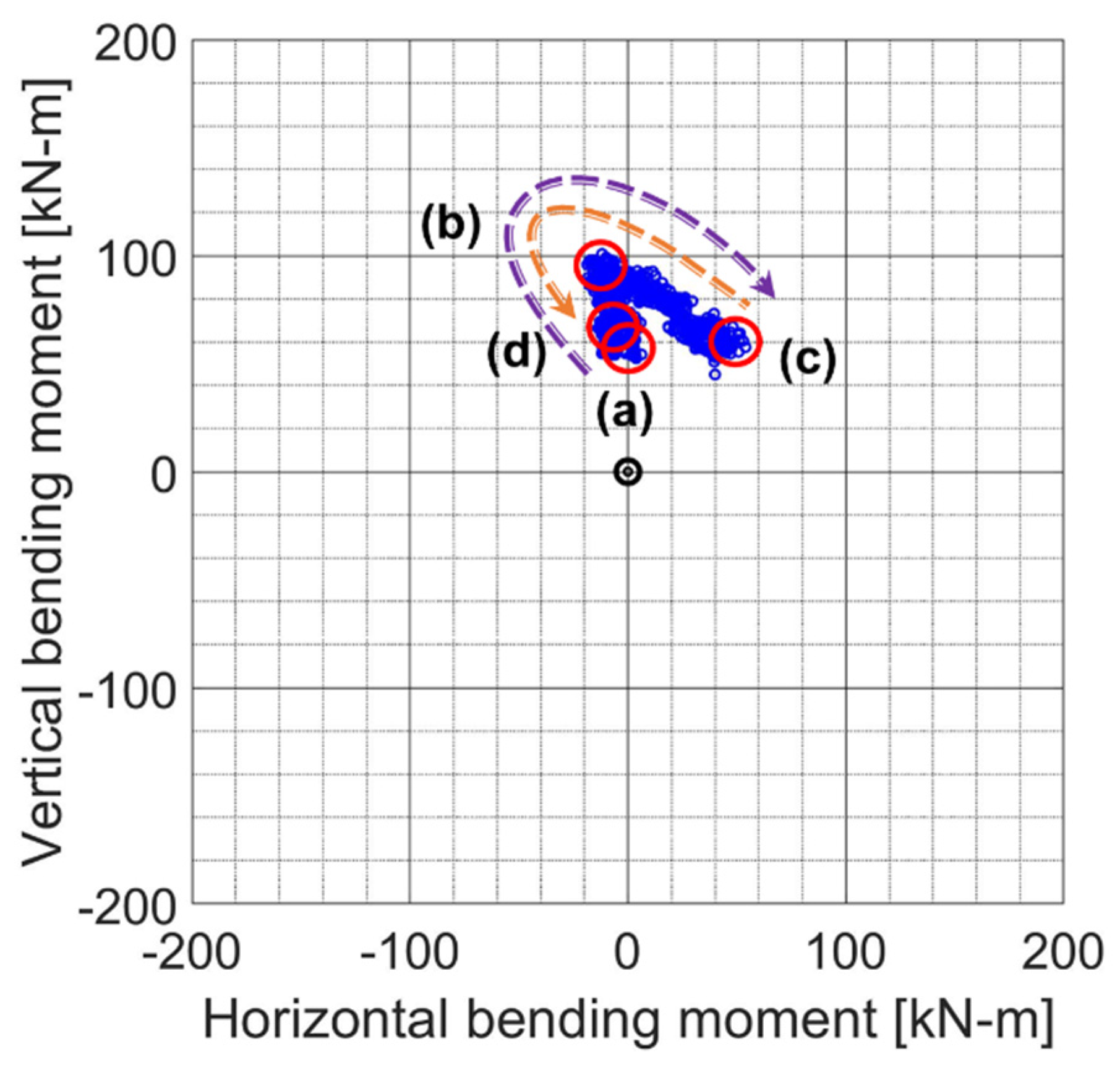
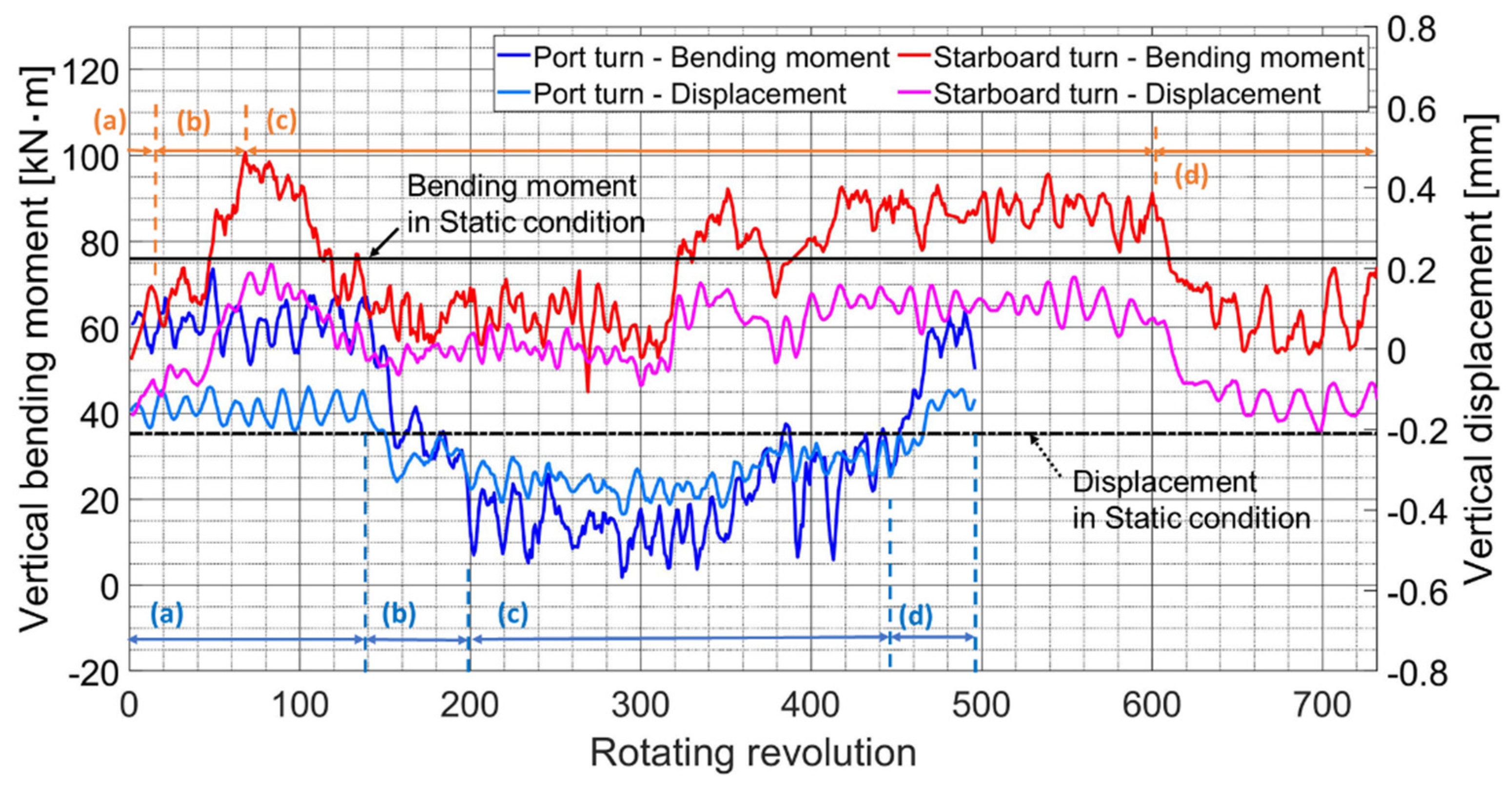
- The moment behavior of the shaft shifted downward in the counterclockwise direction during the port turn compared with going straight ahead, while it shifted upward in the clockwise direction during the starboard turn, and the opposite trend could be observed.
- The reason why the shaft behavior patterns were contrary to each other is that the formation of the wake field at the rear of the stern tube would be completely different depending on the rudder angle.
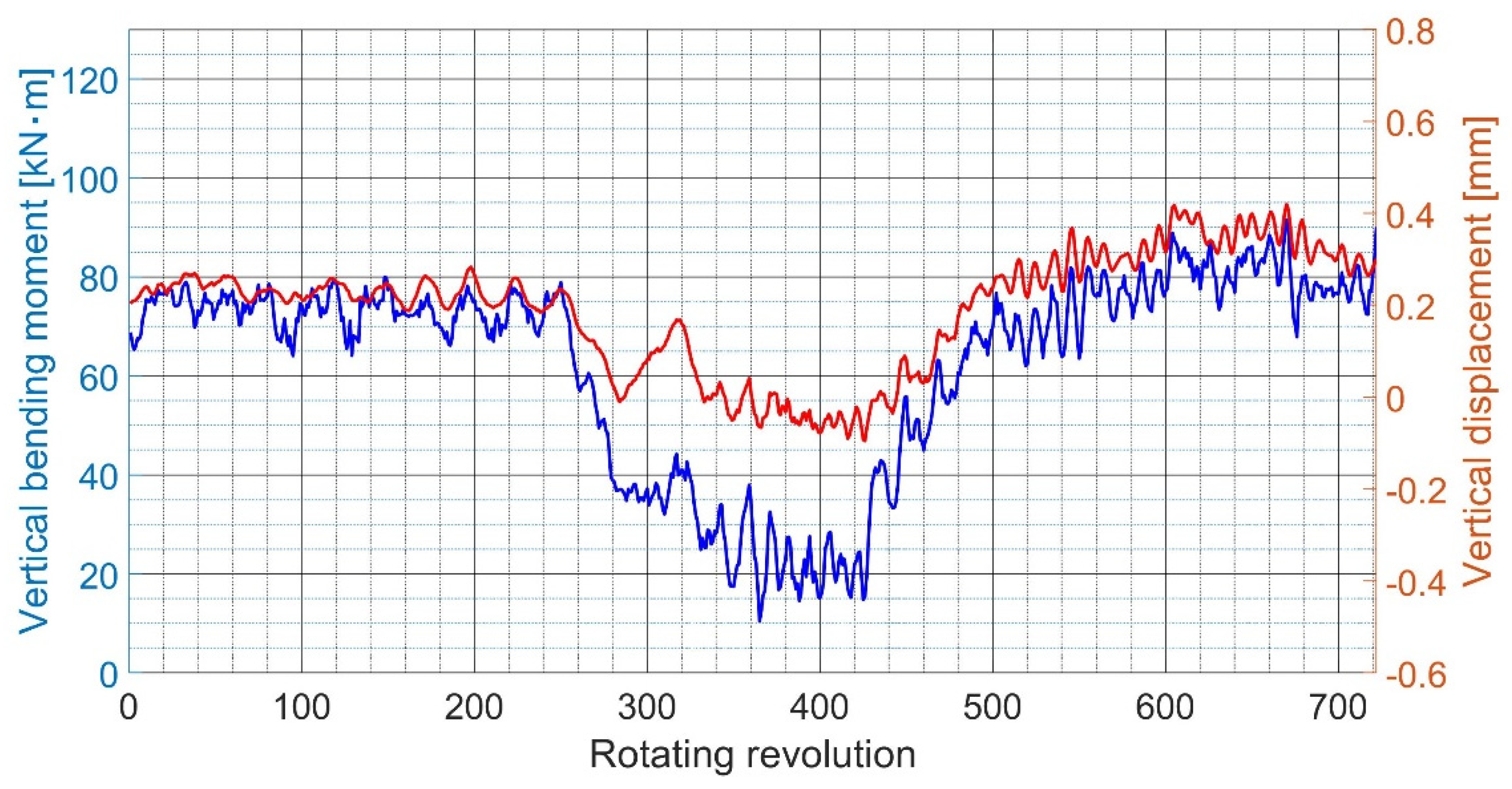
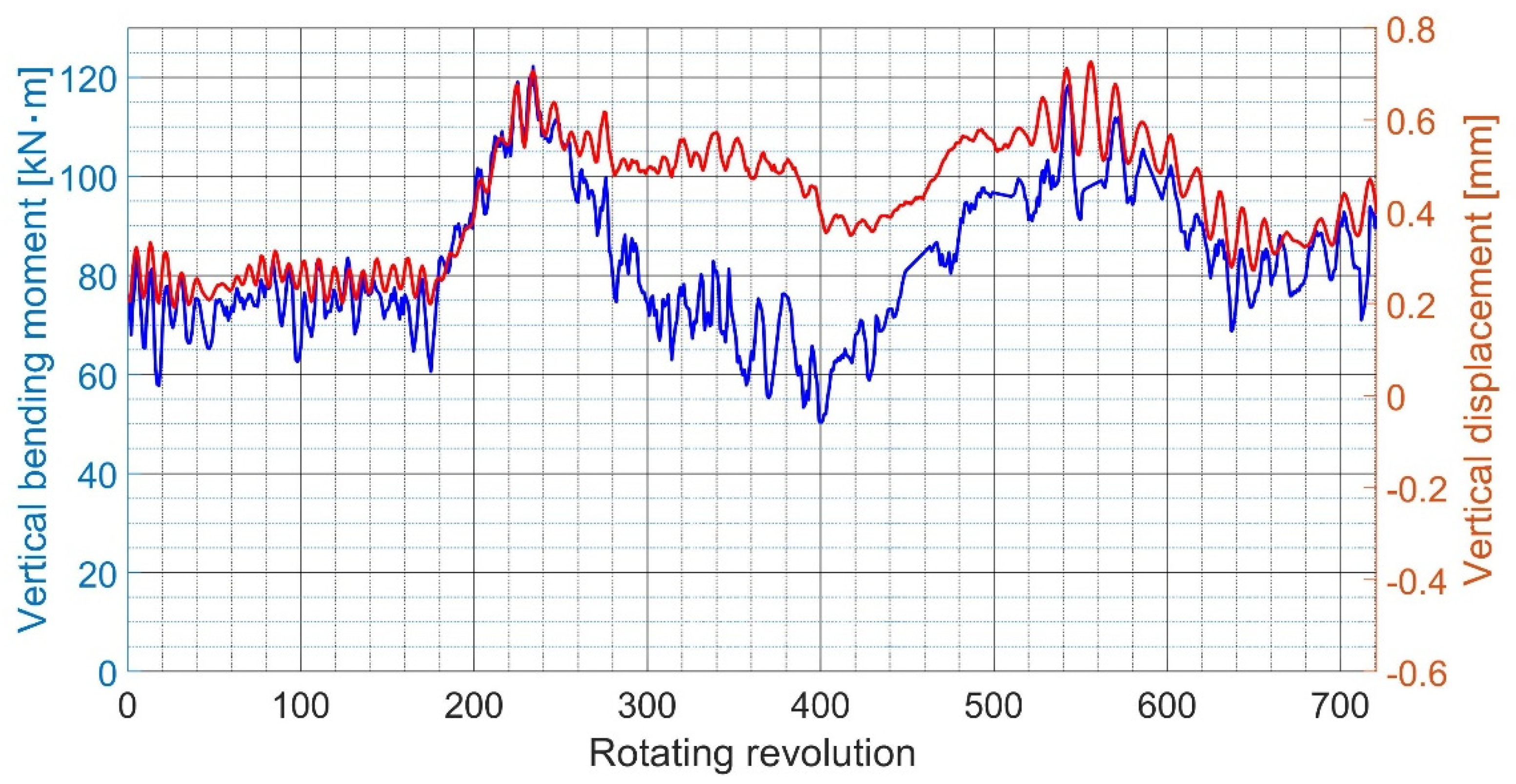
- This was cross-validated using the shaft’s vertical displacement value obtained from the displacement sensor. However, we were unable to measure the vertical displacement due to the limited number of sensor applications. Given that the shaft’s moment behavior varies in the clockwise and anticlockwise directions, further studies with enhanced sensing applications should be performed to improve the accuracy.
- (2)
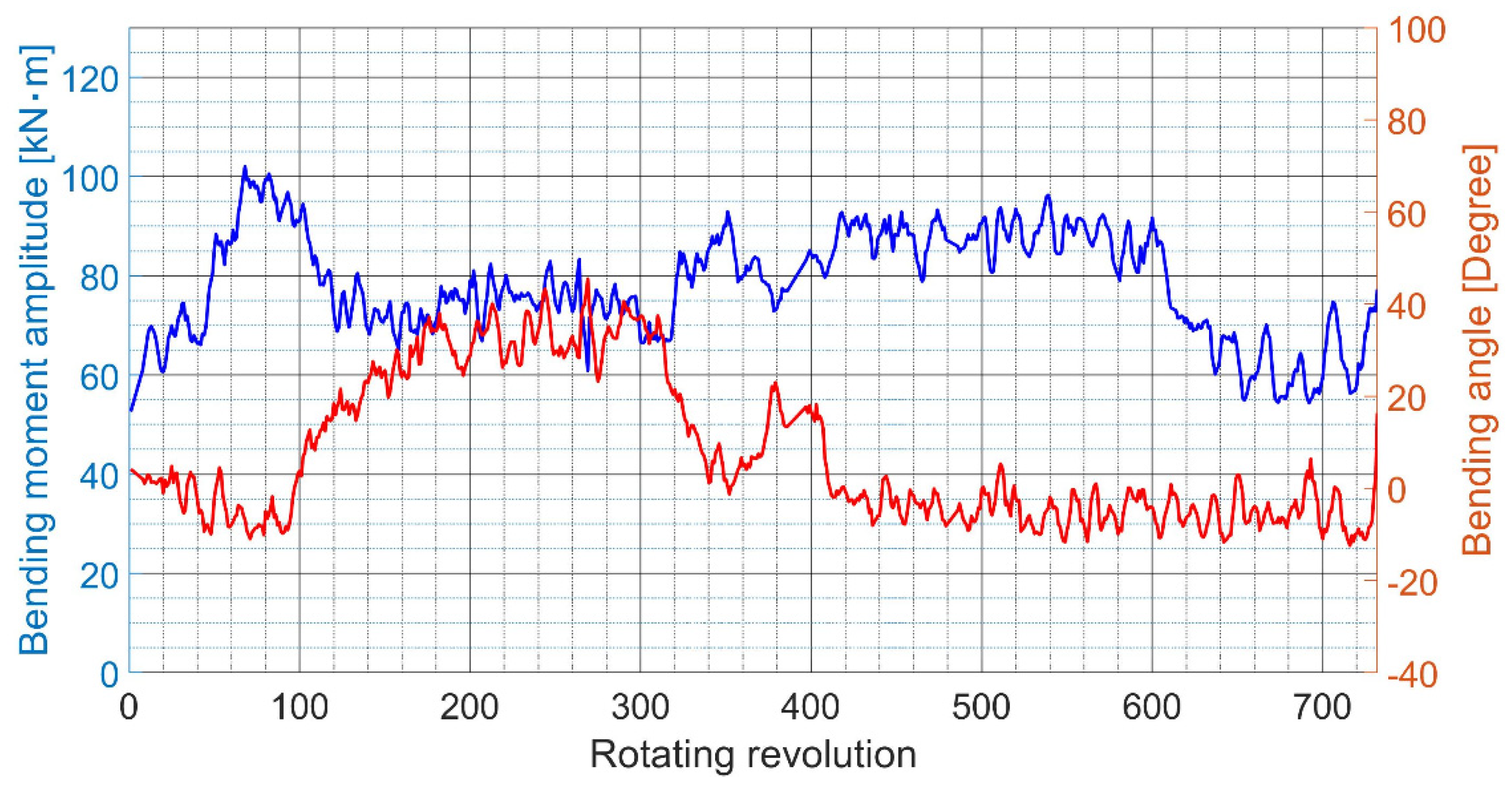
- The shaft continuously moved upward for a longer period of time under the normal ballast condition compared with the fully laden condition during starboard turns.
- Therefore, we recommend that ships avoid rapid starboard turns under ballast draught conditions in terms of securing the stability of the shafting system.
- Moreover, from a long-term perspective, we recommend that the research on evaluating the effect of the bearing force on the shafting system due to a non-uniform wake distribution be further extended.
- (3)
- The key finding of this study is that, even with the same starboard turn, a greater load is applied to the stern tube bearing under ballast conditions compared with fully laden conditions. This could be a significant contribution to the literature, as the conventional quasi-static analysis methods cannot yield these results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Michel, R. A quarter century of propulsion shafting design practice and operating experience in the US navy. J. Am. Soc. Nav. Eng. 1959, 71, 153–164. [Google Scholar] [CrossRef]
- Lehr, W.; Parker, E. Considerations in the design of marine propulsion shaft systems. Soc. Nav. Archit. Mar. Eng. 1961, 67, 555. [Google Scholar]
- Mann, G. Design of propulsion shaft systems using fair curve alignment theory. Nav. Eng. J. 1964, 76, 851–862. [Google Scholar]
- Mann, G. Analysis of shafting problems using fair curve alignment theory. Nav. Eng. J. 1965, 77, 117–133. [Google Scholar] [CrossRef]
- Mann, G. Shipyard alignment of propulsion shafting using fair curve alignment theory. Nav. Eng. J. 1965, 77, 651–659. [Google Scholar] [CrossRef]
- Jeon, H.-J.; Park, J.-G.; Choi, J.-S. Optimum alignment of marine engine shaftings by the finite element method. J. Korean Soc. Mar. Eng. 1978, 2, 3–14. [Google Scholar]
- Moon, D.; Jeon, H. A study on the propulsion shaft alignment calculation by the matrix method of three-moment theory. J. Korean Soc. Mar. Eng. 1981, 5, 20–27. [Google Scholar]
- Park, T.-I.; Lee, H.-Y. Alignment Calculation of Marine Engine Shafting System by Quadruple Integration Method. J. Korean Soc. Mar. Eng. 1979, 3, 32–39. [Google Scholar]
- Larsen, O. Some considerations of marine shafting design. Ind. Lubr. Tribol. 1981, 33, 164–171. [Google Scholar] [CrossRef]
- Class NK. Guidelines on Shafting Alignmen; Class NK: Tokyo, Japan, 2006. [Google Scholar]
- MAN Energy Solutions. Final Alignment of Engine on Board; MAN Energy Solutions: Augsburg, Germany, 2014; p. 5. [Google Scholar]
- MAN Energy Solutions. Bearing Load Measurement by Jacking Up; MAN Energy Solutions: Augsburg, Germany, 2012; p. 23. [Google Scholar]
- Shin, S.; Choe, I. Pressure Distribution Analysis for After Bush Bearing of Ship Propulsion Shaft. J. Soc. Nav. Archit. Korea 2004, 41, 35–40. [Google Scholar]
- Choung, J.-M.; Choe, I.-H. Development of elastic shaft alignment design program. J. Soc. Nav. Archit. Korea 2006, 43, 512–520. [Google Scholar]
- Kozousek, V.; Davies, P. Analysis and Survey Procedures of Propulsion Systems: Shaft Alignment; Lloyd’s Register’s Technical Association: London, UK, 2000; p. 5. [Google Scholar]
- DNV. DNVGL-RU-SHIP Pt. 4, Ch. 2, Sec. 4, 2.1.6 Aft Most Bearing Lubrication Criteria; DNV: Greater Oslo, Norway, 2021; pp. 36–40. [Google Scholar]
- Sun, J.-S.; Kim, Y.-G.; Kim, U.-K. Study on shaft alignment of propulsion shafting system depending on single reaction force supporting position of aft stern tube bearing. J. Mar. Sci. Technol. 2021, 26, 1340–1357. [Google Scholar] [CrossRef]
- Bureau Veritas. Elastic Shaft Alignment(ESA). In Sec 2. 5. Running Calculations; Bureau Veritas: Neuilly sur Seine, France, 2015; Volume NR 592, pp. 13–18. [Google Scholar]
- Park, G.; Koh, C.; Chung, J.; Nam, G.; Chae, J. A Study on the Stern Bearing Damage and Shaft Alignment for 37K DWT Product/Chemical Tanker. J. Soc. Nav. Archit. Korea 2021, 58, 97–104. [Google Scholar] [CrossRef]
- Saitoh, T. Dynamic alignment taking account of propeller forces and stern tube bearing performances. J. MESJ 1983, 18, 142–153. [Google Scholar] [CrossRef]
- Kuroiwa, R.; Oshima, A.; Nishioka, T.; Tateishi, T.; Ohyama, K.; Ishijima, T. Reliability improvement of stern tube bearing considering propeller shaft forces during ship turning. Mitshbishi Heavy Ind. Ltd. Tech. Rev. 2007, 44, 1–3. [Google Scholar]
- Sugimoto, I.; Baba, S.; Yatsuo, M.; Tanaka, H. Development of the criteria for crankshaft alignment in large 2-stroke marine diesel engines. In Proceedings of the Conference Publication of 23rd CIMAC World Congress on Combustion Engine Technology for Ship Propulsion, Power Generation, Rail Traction, Hamburg, Germany, 7–10 May 2001. [Google Scholar]
- Ortolani, F. Dubbioso, G. Experimental investigation of blade and propeller loads: Steady turning motion. Appl. Ocean. Res. 2019, 91, 101874. [Google Scholar] [CrossRef]
- Vartdal, B.J.; Gjestland, T.; Arvidsen, T.I. Lateral propeller forces and their effects on shaft bearings. In Proceedings of the First International Symposium on Marine Propulsors, Trondheim, Norway, 22–24 June 2009; pp. 475–481. [Google Scholar]
- Dubbioso, G.; Muscari, R.; Ortolani, F.; Di Mascio, A. Analysis of propeller bearing loads by CFD. Part I: Straight ahead and steady turning maneuvers. Ocean. Eng. 2017, 130, 241–259. [Google Scholar] [CrossRef]
- Muscari, R.; Dubbioso, G.; Ortolani, F.; Di Mascio, A. Analysis of propeller bearing loads by CFD. Part II: Transient maneuvers. Ocean. Eng. 2017, 146, 217–233. [Google Scholar] [CrossRef]
- Shin, S.-H. Effects of Propeller Forces on the Propeller Shaft Bearing during Going Straight and Turning of Ship. J. Soc. Nav. Archit. Korea 2015, 52, 61–69. [Google Scholar] [CrossRef][Green Version]
- Lee, J.-U. Application of strain gauge method for investigating influence of ship shaft movement by hydrodynamic propeller forces on shaft alignment. Measurement 2018, 121, 261–275. [Google Scholar] [CrossRef]
- Choi, S.-P.; Lee, J.-U.; Park, J.-B. Application of Deep Reinforcement Learning to Predict Shaft Deformation Considering Hull Deformation of Medium-Sized Oil/Chemical Tanker. J. Mar. Sci. Eng. 2021, 9, 767. [Google Scholar] [CrossRef]
- Takahashi, S.; Matsumoto, S.; Tateishi, T.; Ohyama, K.; Kuroiwa, R.; Morohoshi, S. Study on oil film analysis of the stern tube bearing under the conditions of dynamic propeller shaft forces. Jpn. Soc. Mech. Eng. Trans. C 2009, 75, 3054–3061. [Google Scholar] [CrossRef][Green Version]
- Song, G.; Park, H.; Lee, T. The Effect of Rudder Existence on Propeller Eccentric Force. J. Mar. Sci. Eng. 2019, 7, 455. [Google Scholar] [CrossRef]
- Lin, J.-F.; Zhao, D.-G.; Guo, C.-Y.; Su, Y.-M.; Zhong, X.-H. Comprehensive test system for ship-model resistance and propulsion performance in actual seas. Ocean. Eng. 2020, 197, 106915. [Google Scholar] [CrossRef]
- Wontka, L. In Service Diagnosing of a Marine Diesel Engine usion Mean Indicated Pressure. Sci. J. Gdyn. Marit. Univ. 2018, 108, 153–167. [Google Scholar] [CrossRef]
- Wróblewski, P.; Iskra, A. Problems of Reducing Friction Losses of a Piston-Ring-Cylinder Configuration in a combustion Piston Engine with an Increased Isochoric Pressure Gain. In SAE Technical Paper 2020-01-2227; 2020; Available online: https://saemobilus.sae.org/content/2020-01-2227/ (accessed on 9 May 2022).
- Forrest, A.W., Jr.; Labasky, R.F. Shaft Alignment Using Strain Gages. Mar. Technol. 1981, 18, 276–284. [Google Scholar] [CrossRef]
- ABS. Guide for Enhanced Shaft Alignment; American Bureau of Shipping: Houston, TX, USA, 2018; pp. 6–12. [Google Scholar]
- ABS. Guidance Notes on Propulsion Shafting Alignment; American Bureau of Shipping: Housto, TX, USA, 2019; pp. 107–110. [Google Scholar]
- Lee, J.-U. A study of the analysis of shaft alignment considering hull deflections for 50,000 DWT oil/chemical tankers. J. Korean Soc. Mar. Eng. 2016, 40, 191–197. [Google Scholar]
- Seo, C.-O.; Jeong, B.; Kim, J.-R.; Song, M.; Noh, J.-H.; Lee, J.-U. Determining the influence of ship hull deformations caused by draught change on shaft alignment application using FE analysis. Ocean. Eng. 2020, 210, 107488. [Google Scholar] [CrossRef]
- Shi, L.; Xue, D.; Song, X. Research on shafting alignment considering ship hull deformations. Mar. Struct. 2010, 23, 103–114. [Google Scholar] [CrossRef]
- Avgouleas, K.; Sarris, E.; Gougoulidis, G. Practical Aspects of Propulsion Shaft Alignment. In Proceedings of the SNAME 7th International Symposium on Ship Operations, Management and Economics, Athens, Greece, 2–3 April 2021. [Google Scholar]
- Lee, J.-U. A study on the analysis of bearing reaction forces and hull deflections affecting shaft alignment using strain gauges for a 50,000 DWT oil/chemical tanker. J. Korean Soc. Mar. Eng. 2016, 40, 288–294. [Google Scholar] [CrossRef]
- Lee, J.-U. Theoretical and experimental analysis of the lateral vibration of shafting system using strain gauges in 50,000-DWT oil/chemical tankers. J. Korean Soc. Mar. Eng. 2016, 40, 301–306. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 | |||
| Vessel type | 50,000 DWT medium-range oil/chemical tanker | ||
| L × B × D (m) | 174.0 × 32.2 × 19.1 | Propeller | Four blades at a fixed pitch |
| Main engine | Type: MAN B&W 6G50ME-B | Diameter: 6600 mm | |
| MCR: 7700 kW × 93.4 rpm | Material: Ni–Al–Bronze | ||
| NCR: 5344 kW × 82.7 rpm | Mass: 18,200 kg | ||
| Flywheel | Mass: 11,207 kg | Cap and nut mass: 1538 kg | |
| Sensor Type | Sensor Name and Mounted Position |
|---|---|
| Laser sensor | LA (in the vicinity of the forward-stern tube seal box) VDM18-300/32/105/122 of PEPPERL+FUCHS. Accuracy: ±0.2 mm. |
| Strain gauge | SG (in the vicinity of the forward-stern tube seal box) WFLA-3 of the Tokyo Measuring Instrument Lab. Gauge factor: 2122.12 ± 1%. |
| Test No. | Condition | Load | Rpm (Approximately) |
|---|---|---|---|
| 1 | Static | 0 | 0 |
| 2 | Steady state | 25% | 57.3 |
| 3 | Steady state | NCR | 78.3 |
| 4 | Steady state | 85% | 90.3 |
| 5 | Steady state | MCR | 95 |
| 6 | Straight ahead (Midship 0°) | NCR | 83.7 |
| 7 | Command rudder angle port 12° | NCR | 84.9 |
| 8 | Ship turning (Rudder angle port 12° steady) | NCR | 84.9 |
| 9 | Ship’s heading 90° (Then midship 0°) | NCR | 84.9 |
| 10 | Straight ahead (Midship 0°) | NCR | 84.9 |
| 11 | Command rudder angle starboard 12° | NCR | 84.9 |
| 12 | Ship turning (Rudder angle starboard 12° steady) | NCR | 84.9 |
| 13 | Ship’s heading 90° (Then midship 0°) | NCR | 84.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-W.; Vuong, Q.D.; Jeong, B.; Lee, J.-u. Changes in Propeller Shaft Behavior by Fluctuating Propeller Forces during Ship Turning. Appl. Sci. 2022, 12, 5041. https://doi.org/10.3390/app12105041
Lee J-W, Vuong QD, Jeong B, Lee J-u. Changes in Propeller Shaft Behavior by Fluctuating Propeller Forces during Ship Turning. Applied Sciences. 2022; 12(10):5041. https://doi.org/10.3390/app12105041
Chicago/Turabian StyleLee, Ji-Woong, Quang Dao Vuong, Byongug Jeong, and Jae-ung Lee. 2022. "Changes in Propeller Shaft Behavior by Fluctuating Propeller Forces during Ship Turning" Applied Sciences 12, no. 10: 5041. https://doi.org/10.3390/app12105041
APA StyleLee, J.-W., Vuong, Q. D., Jeong, B., & Lee, J.-u. (2022). Changes in Propeller Shaft Behavior by Fluctuating Propeller Forces during Ship Turning. Applied Sciences, 12(10), 5041. https://doi.org/10.3390/app12105041