1. Introduction
In industrial plants, such as mining and metallurgical plants, there is a frequent requirement for the periodical quantification of the amount of materials stored in the input or waste dumps. The stored material usually consists of a loose consistency gravel, sand, iron ore pellets, steelmaking slag, gangue, fly ash, etc. Given the logistics of the production process, the materials entering into production usually have a heap shape. Materials of different kinds or fractions are stored in separate heaps. Material loading and removal occur in small heaps realized by tracked or wheeled loaders; at larger scale heaps, a belt or giant gantry machines are preferably used.
A required quantification parameter is the volume of the deposited material in the desired moment. The methodology of the work consists of geodetic measurements in the field, data processing, and calculation. When choosing a surveying method, it is essential to consider the specific size and shape of the measured object, its accessibility in terms of personnel safety while surveying, and the time period in which it is necessary to make measurements in the field [
1]. An important aspect is the required accuracy of the determined volume, which depends mainly on the precision and detail of the resultant 3D model, i.e., primarily the amount and precision of measured points [
2]. Several geodetic methods can be used for this purpose. Global navigation satellite systems (GNSS) and the real-time kinematics method (RTK) are suitable for such works.
The tachymetric measurement on the principle of the spatial polar method using electronic total station (TS) can be considered as a base method for geodetic spatial data collection [
3]. The non-prism distance measurement use is suitable for detailed point measurements of minimal personnel movement on the heap body and accelerating fieldworks [
3]. The motorized total stations with automatic scanning option and mainly terrestrial laser scanners (TLS) are the current trend of spatial polar method use in surveying instruments [
4].
These surveying technologies are most commonly used for direct spatial data collection. Their advantage is simplicity with appropriate accuracy; the disadvantage is mainly the long time period required to carry out measurements in the field, often in dangerous conditions on the bulk material.
The TLS measurement method has been used as a validated and reference method for comparing the results of several tested measurement methods and for evaluating surfaces in high-altitude environments [
5,
6].
Gallay et al. [
7], Hofierka et al. [
8], and Pukanská et al. [
9] also used TLS measurements in the mapping of underground and surface karst areas. Erdélyi et al. [
10] used TLS measurements to determine the deformation of a bridge and to document the facade elements of a high-rise building. They used a high scan point density of 3 mm to capture small-scale details on the measured object. In [
11], the TLS method was used as a reference in the investigation of the spatial deformation of a bridge.
TLS measurement can be used in an industrial environment to document industrial machinery, such as rotary kilns [
12] and boiler drums [
13]. Another use is the ability to accurately determine the volumes of mined reserves and determine the specific gravity of heterogeneous materials [
14].
Křemen used high-density terrestrial laser scanning in the documentation of historical monuments [
15,
16], and Koska [
17] and Janowski [
18] combine TLS and SfM photogrammetry.
We consider aerial photogrammetry (AP) as a traditional surveying method. Compared to the aforementioned methods, it is suitable for larger territorial unit mapping or larger object documentation [
19]. The most common products of aerial image processing are vector maps, orthophoto maps, digital terrain models (DTM), and digital surface models (DSM) [
20,
21,
22]. In recent years, digital aerial cameras and appropriate software development have provided sensors with higher resolution, allowing the Earth’s surface to be captured with detail-level improvement at the same flight height, respectively reducing the necessary number of images and thus flight time and cost of imaging [
23]. The minimizing of fieldwork time, rapidity of photogrammetric data collection and processing, and high detail and accuracy of the terrain models generated by modern software currently take aerial photogrammetry forward as an exciting alternative in terms of quality and efficiency in comparison with terrestrial geodetic methods [
24].
Unmanned aerial systems (UAS) are preferred for smaller-scale areas today, mainly because of their ease of use and low acquisition costs.
Rusnák et al. provided a template for the application of unmanned aerial vehicles (UAV) in mapping a river landscape [
25]. Its outputs can also be applied to the mapping and documentation of quarries and landfills. Zeybek [
26], Štroner et al. [
27], and Ren et al. [
28] evaluated the quality and accuracy of UAV photogrammetry data using RTK GNSS methods. Without GCPs (ground control points), they achieved a positional accuracy of 1–3 cm and height accuracy of 4–6 cm. Burdziakowski addressed the quality of UAV-based DEM models affected by poor lighting conditions by comparing point clouds [
29]. The filtering and classification of point clouds were dealt with by Zeybek [
30] and Klápště et al. [
31].
The analysis of spatial solids approximated by a regular solid was applied by Janowski et al. [
32]. Speed and morphology change using cross-section processing was implemented by Kociuba [
33]. Kociuba et al. in their works also dealt with the issue of the volume of moved material of eroded banks in Svalbard. They studied the bedload transport of material in a glacial river (see discussion) [
34,
35].
The current trend in photogrammetric processing is the SfM method. It can be used to process both terrestrial and aerial photogrammetric images [
36]. In addition, there are many commercial and open-source software solutions [
37].
Mapping using manned aerial systems is justified, especially for larger areas such as the tasks of investigating flood events [
38], soil, gullies, shore erosion [
39,
40], landslides [
41], and volcanological surveying [
42] or of analysing the slope stability of hard-to-reach or larger units [
43,
44,
45]. In practice, in addition to creating DEMs and DSMs, it is also used to create updates to orthophoto maps and large-scale maps. Other types of sensors with their economic and technological benefits, such as thermal [
46], multi, and hyperspectral cameras and Lidars [
47,
48,
49,
50,
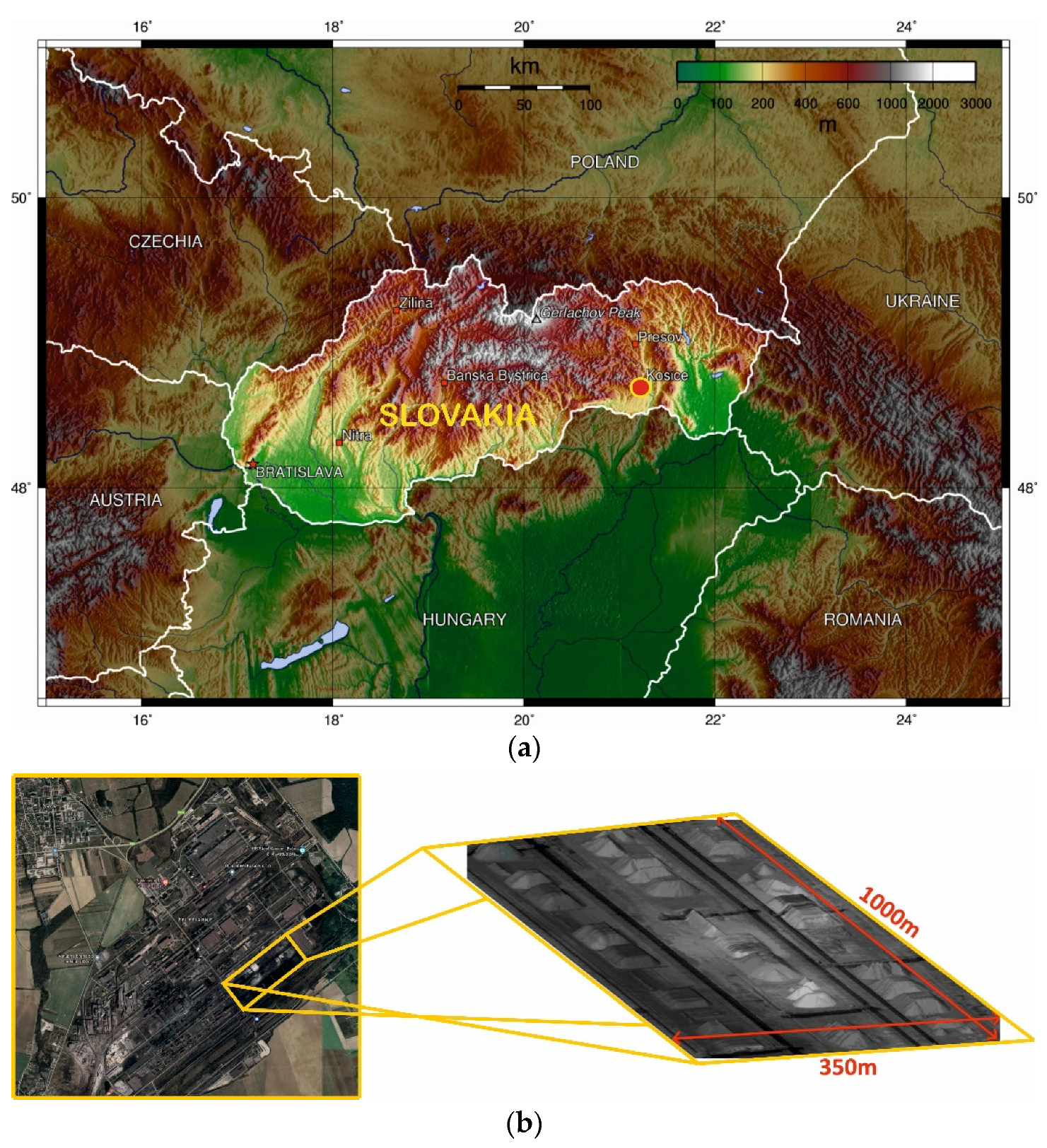
51,
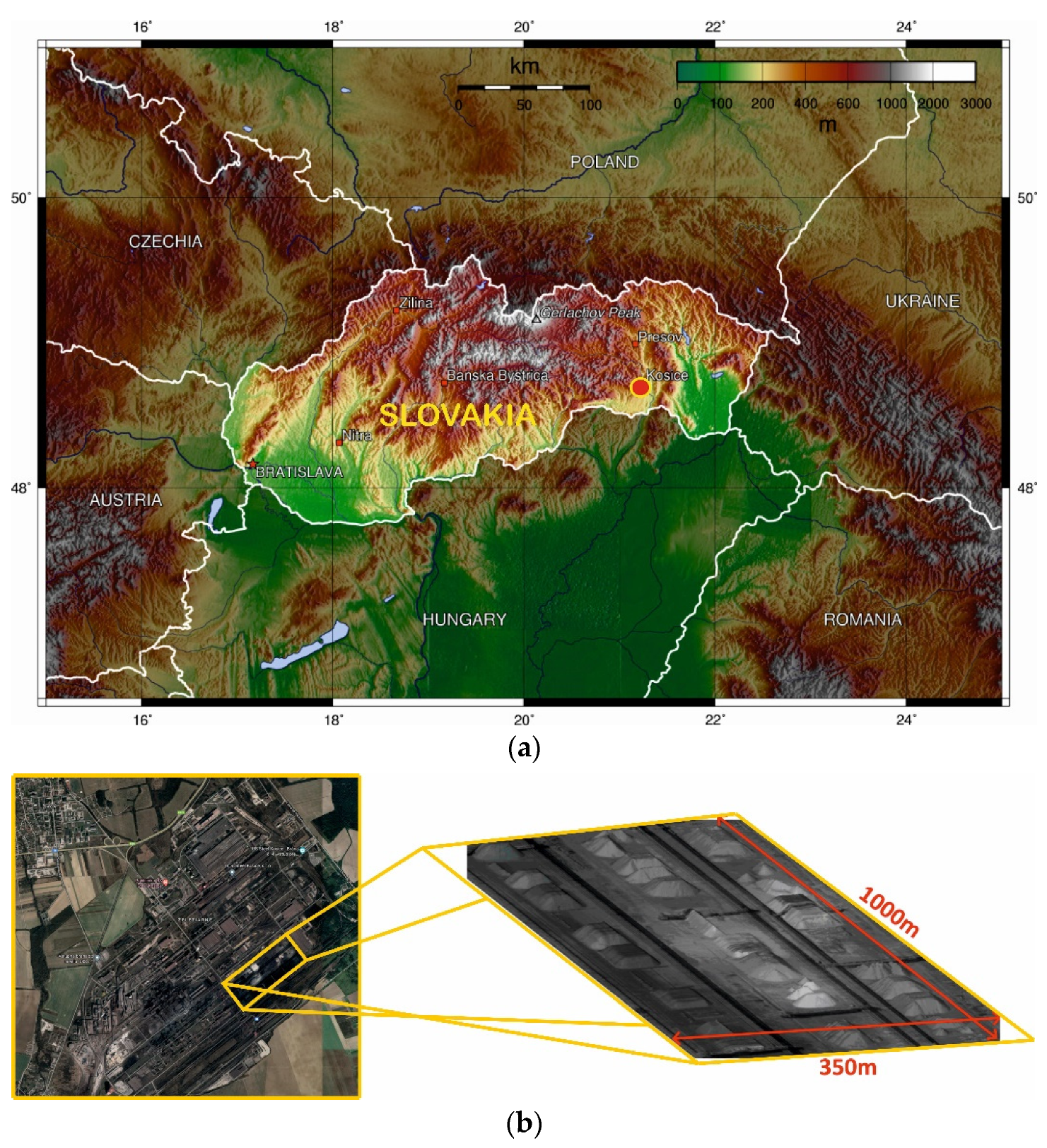
52], can also be placed on airborne platforms. The AP method using manned aerial vehicles is currently competing with the cheaper and more operational UAS photogrammetry, but it effectively covers a smaller area and takes measurements from a lower altitude. This study aims to demonstrate that the use of AP achieves the required accuracy and detail of outputs. After validation on a test area of 1000 m× 350 m, it can be assumed that usage in larger areas (open-pit mines, large landfills, etc.), i.e., where the use of conventional rotary or fixed-wing UAVs would be less economical, will meet the requirements and needs. We also see a use in obtaining data on industrial heaps and dumps as a secondary product when mapping larger parts of the territory if carried out in the required time.
Given the large range of the area of interest, the terrestrial measurement would force more days of shut down, which, at a frequent periodic measurement for the company operating in the area, represents an unacceptable loss of production. Therefore, from the available methods for performing the required measurements, the method of aerial photogrammetry has been chosen as likely the most appropriate way to fulfil the purpose of measurement. The advantages of this method consist of the very short time for measurement, fast and automated data processing procedures, sufficient precision, the non-contact method of measuring, and the minimized working time in the factory [
3,
18,
23].
However, it was necessary to confirm the suitability of the digital aerial photogrammetry method as a primary method for future measurements regarding comparability and reliability of results with previous measurements. For this purpose, a one-time validation project of heap documentation and volume determination was realised with data collected by aerial photogrammetry compared to the reference method TLS and GNSS as previously used methods. This case study presents verifying the appropriateness of the photogrammetric techniques for the documentation and volume determining of material deposited in dumps of larger scale. The requirements for the measurement and processing methods are determined in particular by continuous operation in the plant (and therefore also in a landfill), the minimal forced shutdown of loaders, and the adequate accuracy of the determined volumes.
4. Discussion
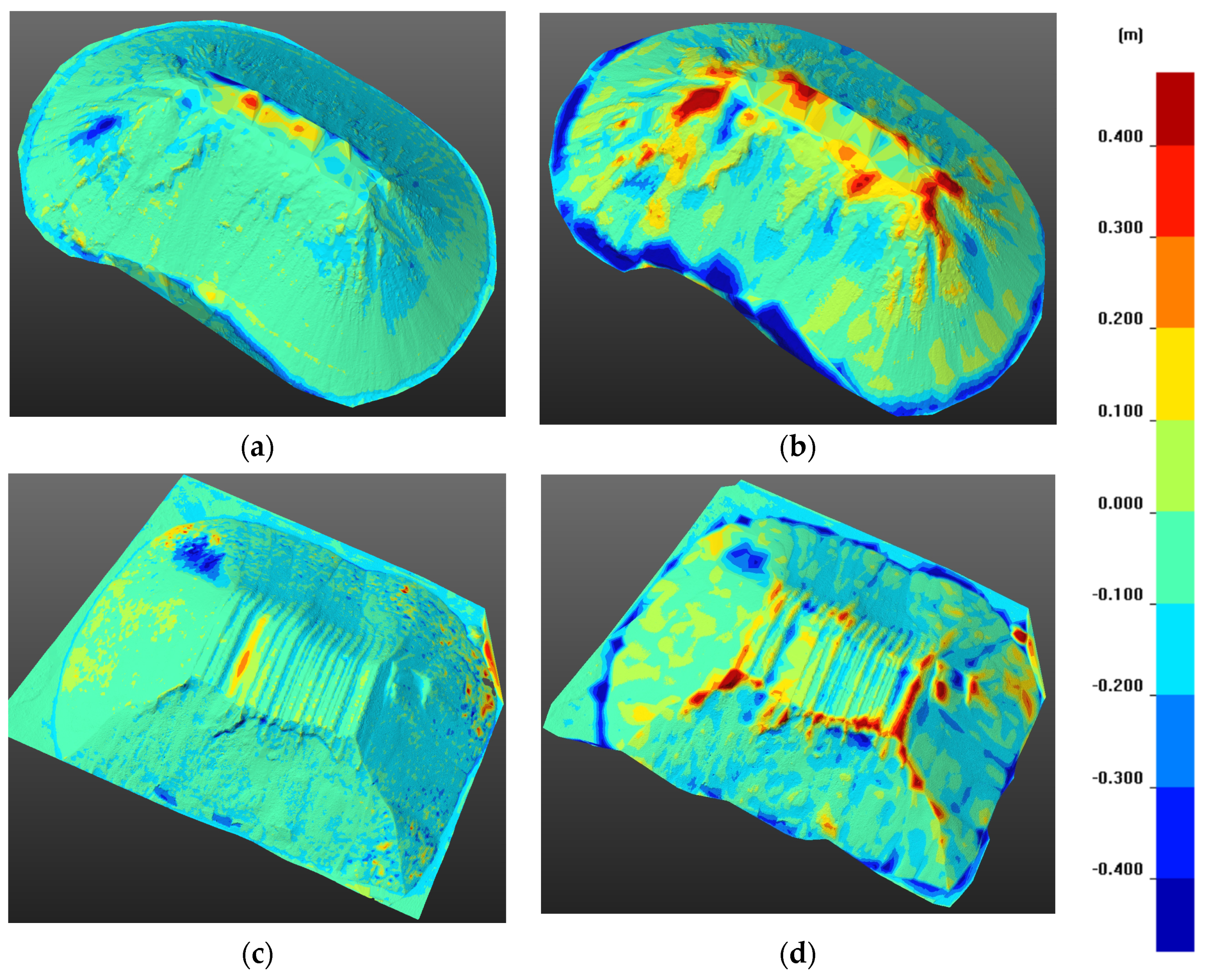
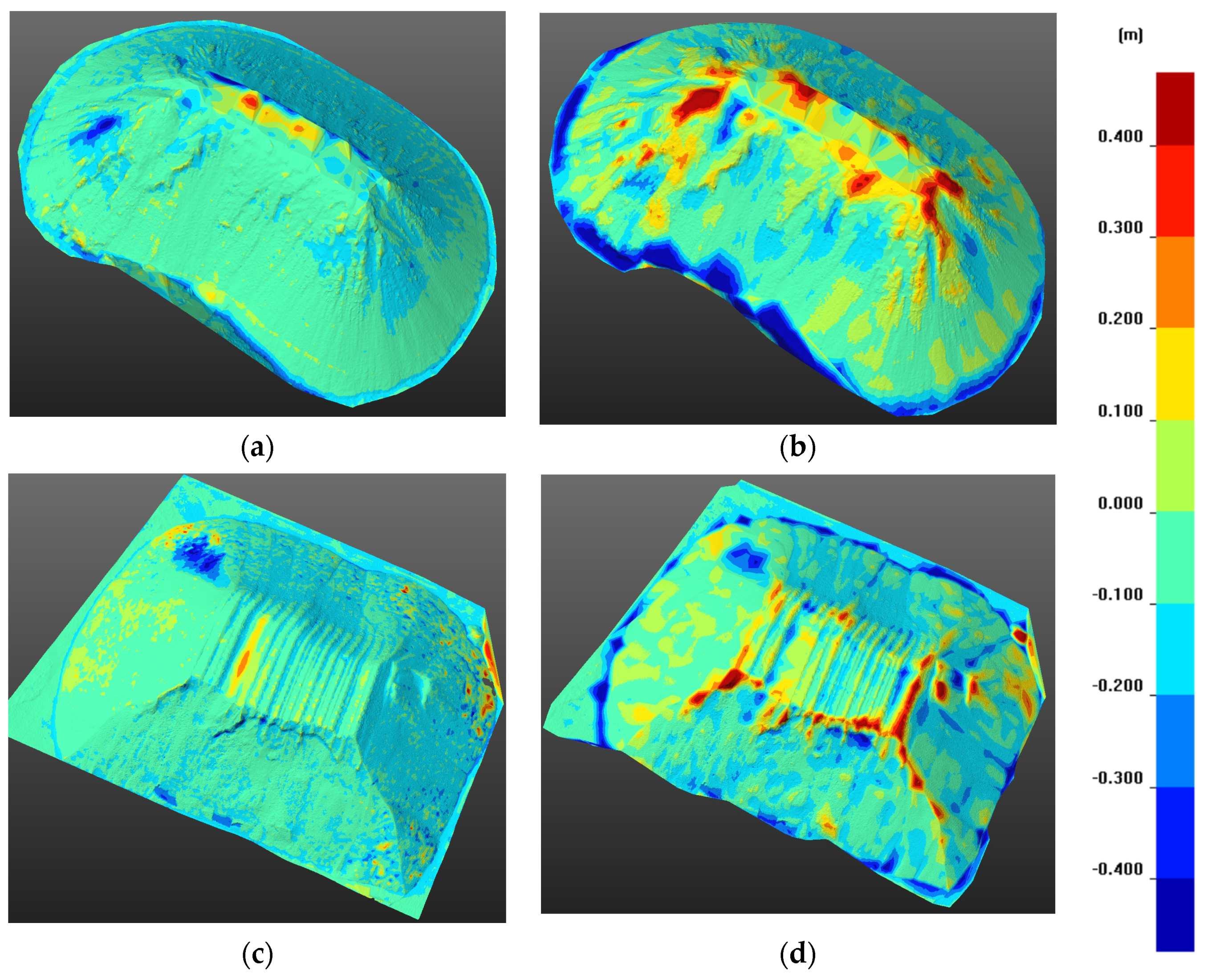
The mesh surface comparison (
Figure 8) was the initial analysis in this research. It shows a level of agreement of the compared surfaces obtained by different surveying methods. TLS vs. AP surface evaluation (
Figure 8a,c) is almost identical at both heaps. The most significant differences between the surfaces were detected mainly on the upper part of the heap and partly on its sidewalls (red and blue colours). This can be assigned to the absence of a sufficient number of points at these locations measured by the TLS method. Despite the goal of making TLS measurements with a full coverage of heaps and with a raised instrument station position, these areas were hidden by obstacles. The TLS vs. GNSS surface comparison (
Figure 8b,d) identifies significant differences of surfaces at both heaps. These are mainly found on the edges of the formed planar areas and on the circumference at the base of the heaps. This is due to the substantially lower density of points in the model created from the GNSS RTK measurements. Furthermore, all the direct methods, including GNSS, are influenced by human factors: when moving on the heap, it is not easy for the operator to select the appropriate measured points for optimal surface description.
To obtain numerical values for comparison, the frequency difference histograms were created in sets with a 5 mm size for the residual values of −0.2 m to + 0.2 m (
Figure 9). TLS vs. AP surface analysis has confirmed the initial assumption about the possible correlation of surface models obtained by the employed method. TLS vs. AP surface validation shows a standard deviation σ = 39 mm for Heap no. 1 and σ = 42 mm for Heap No. 2. TLS vs. GNSS surface validation shows a standard deviation σ = 67 mm for Heap no. 1 and σ = 68 mm for Heap No. 2. When comparing the TLS vs. AP surface validation residuals, there is a mean error value of 9 mm for Heap No. 1 and 6 mm for Heap No. 2. TLS vs. GNSS surface validation residuals show a mean error value of 12 mm for Heap No. 1 and a mean error value of 15 mm for Heap No. 2. The correlation coefficient was calculated from the frequency of residual values at the selected intervals of 5 mm of the same data collection methods and processed in two separate heaps. The correlation coefficient value was 0.96 for the AP and 0.75 for the GNSS measurement. This parameter shows a high reliability, especially for the results obtained by the AP.
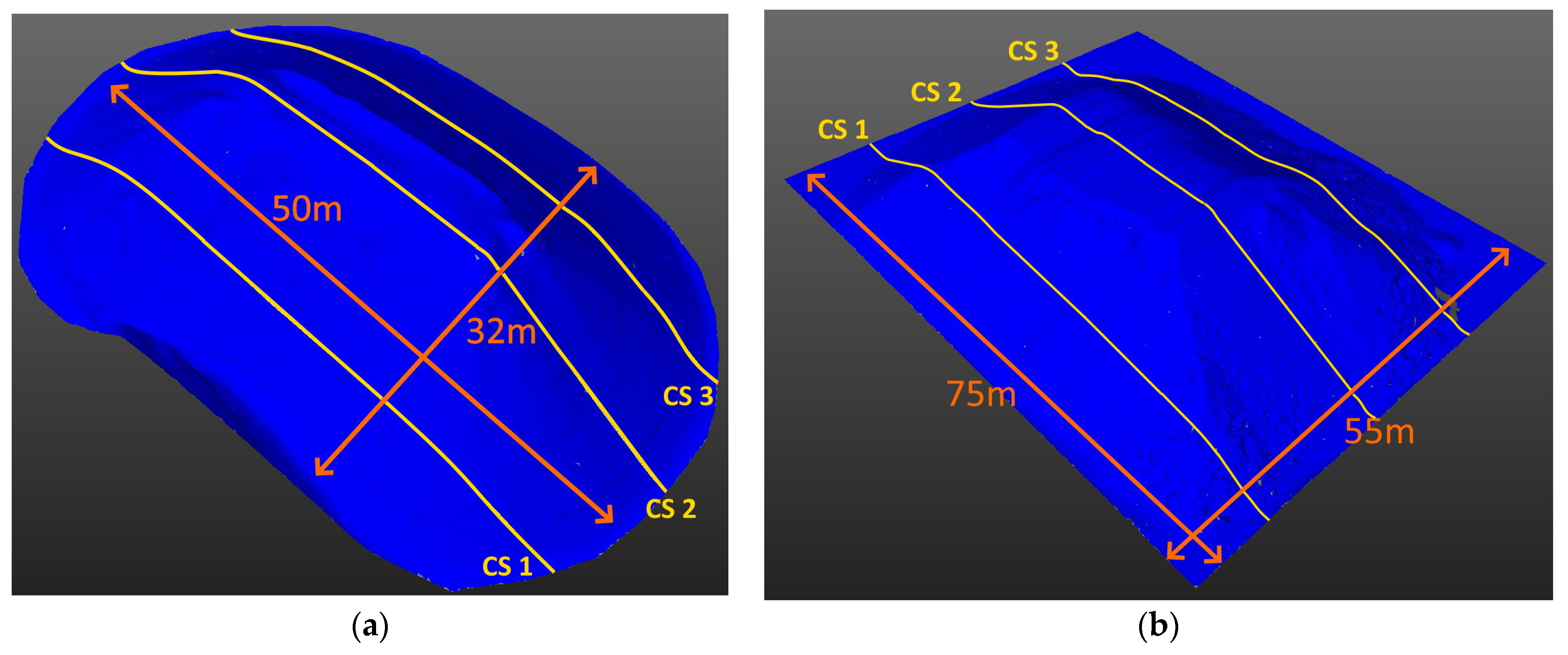
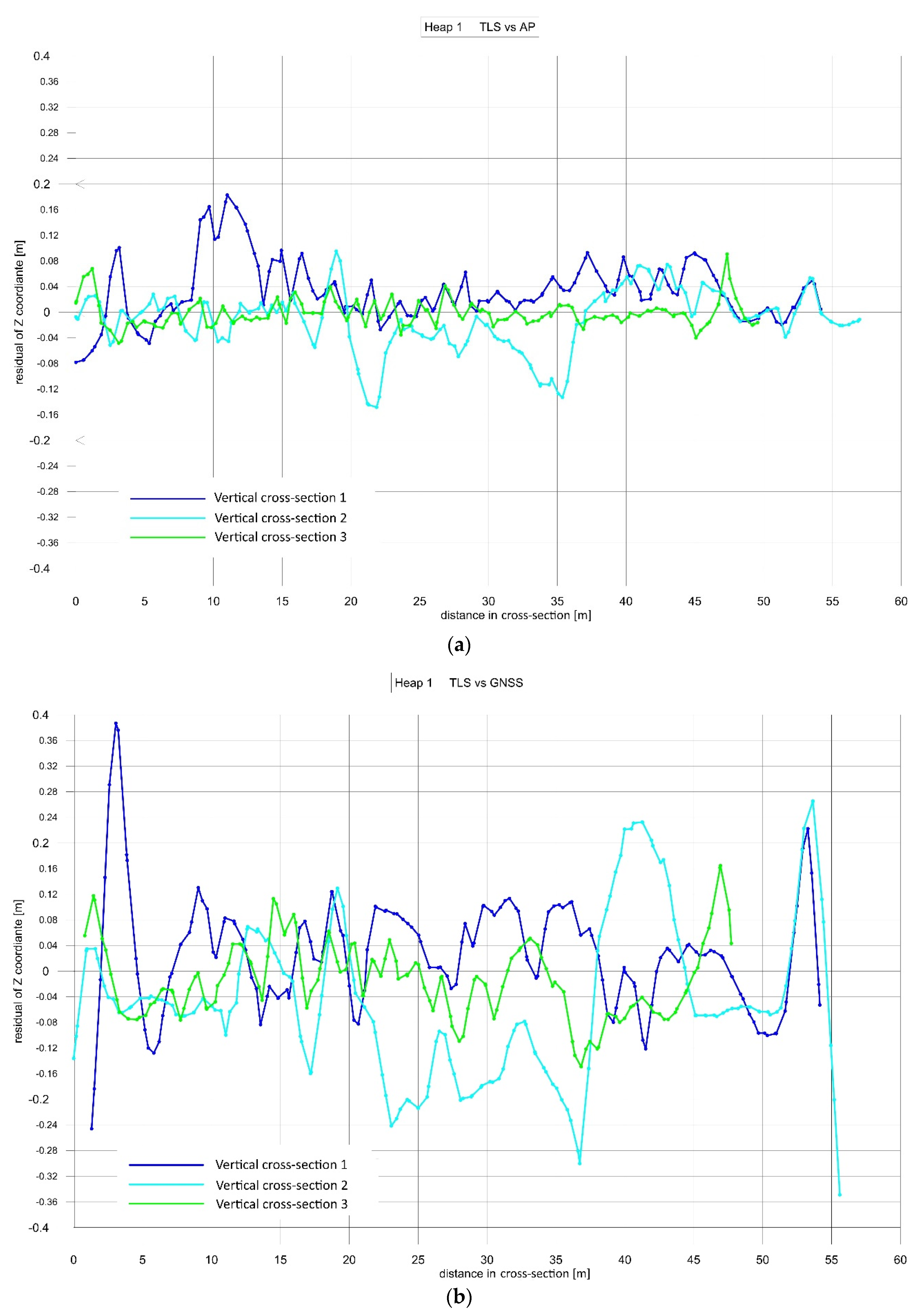
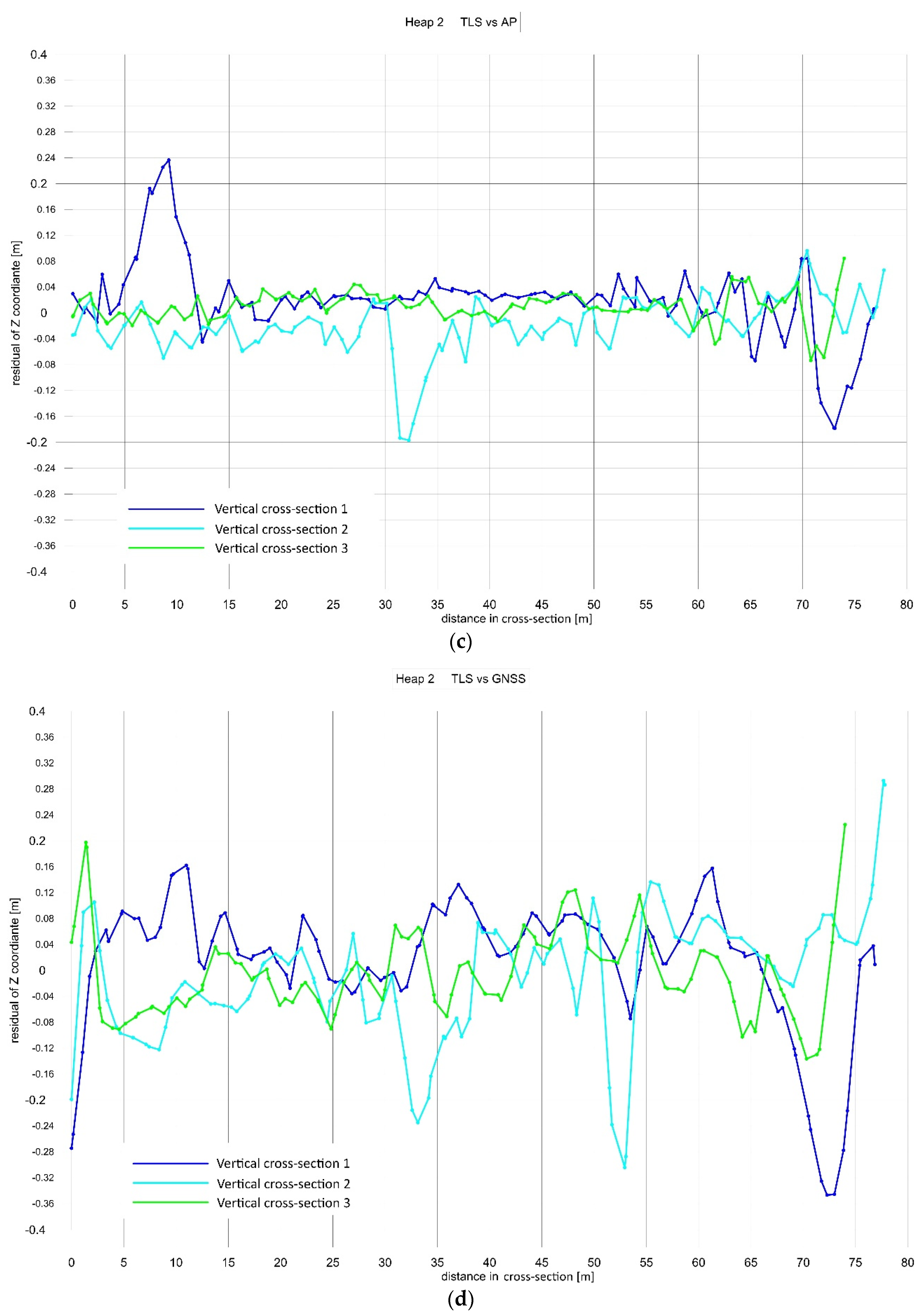
Cross-section analysis (
Figure 10) was performed on smaller datasets relative to surface analysis, which corresponds to the evaluated standard deviations according to initial assumptions. TLS vs. AP cross-sections validation has a standard deviation σ = 53 mm for Heap No. 1 and σ = 49 mm for Heap No. 2. TLS vs. GNSS surface validation shows a standard deviation σ = 100 mm for Heap No. 1 and σ = 91 mm for Heap No. 2. TLS vs. AP cross-sections validation residuals show a mean value
= 6 mm for Heap No. 1 and
= 3 mm for Heap No. 2. TLS vs. GNSS surface validation shows a mean value
= 11 mm for Heap No. 1 and
= 8 mm for Heap No. 2.
Yourtseven [
58] compared photogrammetric DSMs obtained from different flight altitudes up to 350 m AGL using UAS. The reference model was DSM obtained by TLS. When comparing GNSS and TLS measurements by comparing the Z coordinate in the sections, he achieved a standard deviation of 73 mm. When comparing GNSS and AP from a height of 350 m AGL, the standard deviation was approximately 60 mm. The values correspond to our achieved results. When comparing TLS and AP, a standard deviation value of up to 76 mm was reached.
The comparison of the specified volumes (
Table 7) confirms the results of previous analyses. Volume difference values were specified for the comparison of TLS vs. AP as 0.09% at Heap No. 1 and 0.08% at Heap No. 2, and for the comparison of TLS vs. GNSS as −3.36% for Heap No. 1 and −1.67% for Heap No. 2. Regarding the relatively large size difference of both heaps, these results are at the level of expected values and correspond to small values of the mean error of residuals to the reference surface.
The determination of volumes by contact methods such as the spatial polar method using total stations and the RTK method using GNSS was summarized by Ajayi [
3] as comparable. This is mainly due to approximately the same density of measured points. This has the most significant impact on the quality of the model and the derived results. By comparing volumes with a reference value, he determined an error in determining the volume with a value of 2.9% [
3], which is in line with our results of the GNSS comparison. Tamin et al. [
59] achieved a volume difference of 0.002% between TLS and AP. For AP data acquisition, a UAS was used at the height of 100 m AGL.
The results show that the AP method for volume determination and documentation is in its precision comparable with the reference method TLS (the calculated volumes differ by less than 0.1%) and is significantly more accurate and reliable than the RTK GNSS method (volumes differ in ones of percentages).
The advantage is the high density of surveyed points and thus almost true shape capture of the measured object. In areas with poorer texture, e.g., smooth surfaces and shadowy places, the error points occur, but these can be effectively removed using appropriate filtering tools. In the case of multistage measurements, it is appropriate to make a flight with the same parameters and external orientation using the same control points [
60].
Although the TLS measurement method achieves excellent results, it has some limits: in particular, the need for field measurements and the incompleteness of the point cloud and 3D model. It is, therefore, suitable for smaller areas or separate objects [
34]. Furthermore, the AP method with a correct measurement setup provides a higher work efficiency and model quality [
5,
17].
Ajayi [
3] also compared the time required for field measurements by the different methods. If we do not consider the time required for flight and GCP preparation, conventional measurement is more time consuming than AP. In our case study, a large area was surveyed. Therefore, fieldwork is only a small part of the surveying process. The total time required for AP acquisition is, then, shorter than using terrestrial measurement [
36]. However, with a large number of images, it is necessary to take into account the longer time of post-processing software processing [
37].
A disadvantage of AP use is that it only allows for measuring objects visible from above. It depends on suitable weather, which allows the flight to be made and provides good lighting conditions. Measurements can be made only in daylight, ideally in the midday hours. Risk factors in terms of industrial plants also include the direction and strength of the wind, which could impair visibility by smoke from nearby chimneys or swirling dust from heaps. These risks should be considered during mission planning and scheduling. Nevertheless, the accuracy, efficiency, speed, and economic view of AP compared with other methods make it the first choice for solving problems associated with data collection for terrain modelling and volume calculation with larger scale territory and objects.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}