Reactive Balance Control for Legged Robots under Visco-Elastic Contacts

 , ,
, ,
Abstract
1. Introduction
1.1. Problem Overview
1.2. State of the Art
1.3. Contributions
1.4. Paper Structure
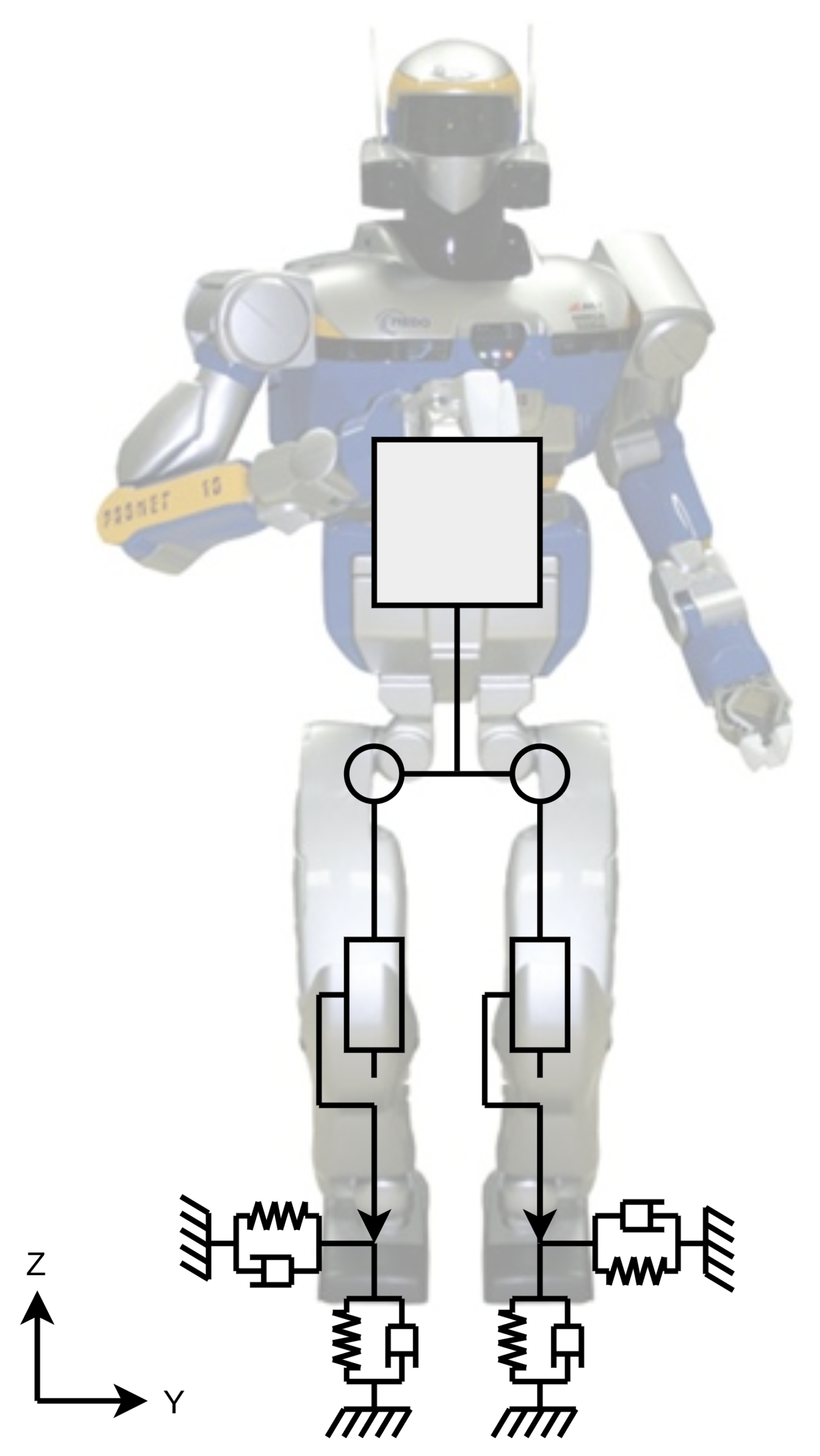
2. Background: Dynamics and Contact Model
2.1. Visco-Elastic Contact Model
2.2. Importance of Stiffness vs. Damping
2.3. Centroidal Dynamics
2.4. Whole-Body Dynamics
3. State of the Art
3.1. Inverse Dynamics with Rigid Contacts (TSID-Rigid)
3.2. Admittance Control (Adm-Ctrl)
4. Inverse Dynamics Admittance Control (TSID-Adm)
5. Flexible TSID (TSID-Flex-K)
5.1. Feedback Linearization
5.2. Accounting for Force Variations during the Time Step
5.3. Linear Feedback Regulator
5.4. Friction Force Constraints
5.5. Summary
6. Results
- TSID-Rigid: a state-of-the-art approach, see Section 3.1.
- Adm-Ctrl: a state-of-the-art approach, see Section 3.2.
- TSID-Adm: a novel approach, see Section 4.
- TSID-Flex-K: a novel approach, see Section 5.
6.1. Simulation Environment
6.2. Gain Tuning
6.3. Test Description
- realistic encoder quantization errors and white Gaussian noise on force sensing and gyroscope (see Table 3);
- an Extended Kalman Filter (explained in Appendix B) to estimate the robot state, with the covariances specified in Table 4;
- limited torque bandwidth by filtering the desired joint torques with a first-order low-pass filter with a cut frequency of 30 Hz. The best torque-tracking bandwidths that have been reported for high-performance actuators are between 40 Hz and 60 Hz (e.g., 40 Hz for hydraulic actuators [2], 46 Hz for electric motors with harmonic drives [21], 60 Hz for series elastic actuators [22]).
- joint Coulomb friction of about 1% of the maximum joint force/torque (0.4 Nm for hip joints, and 4 N for knee joints, which are prismatic).
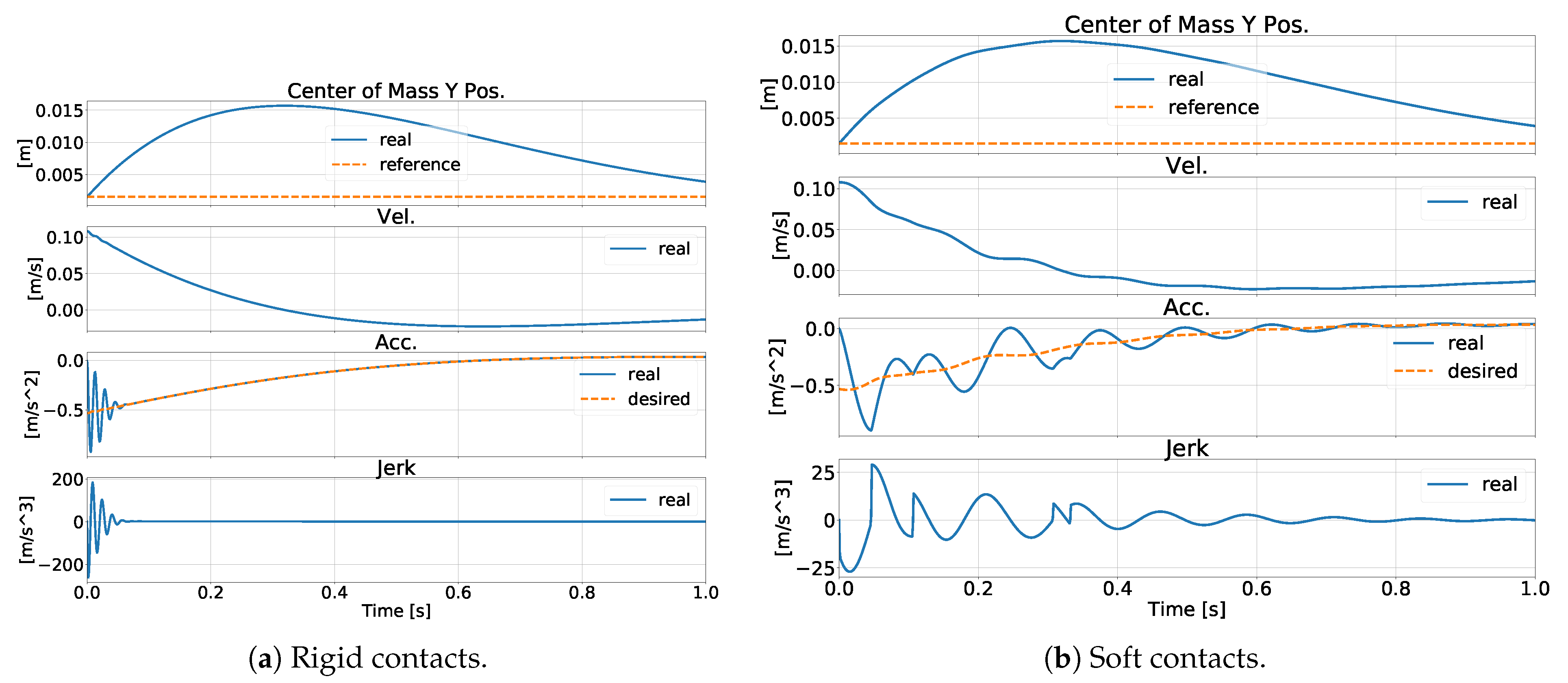
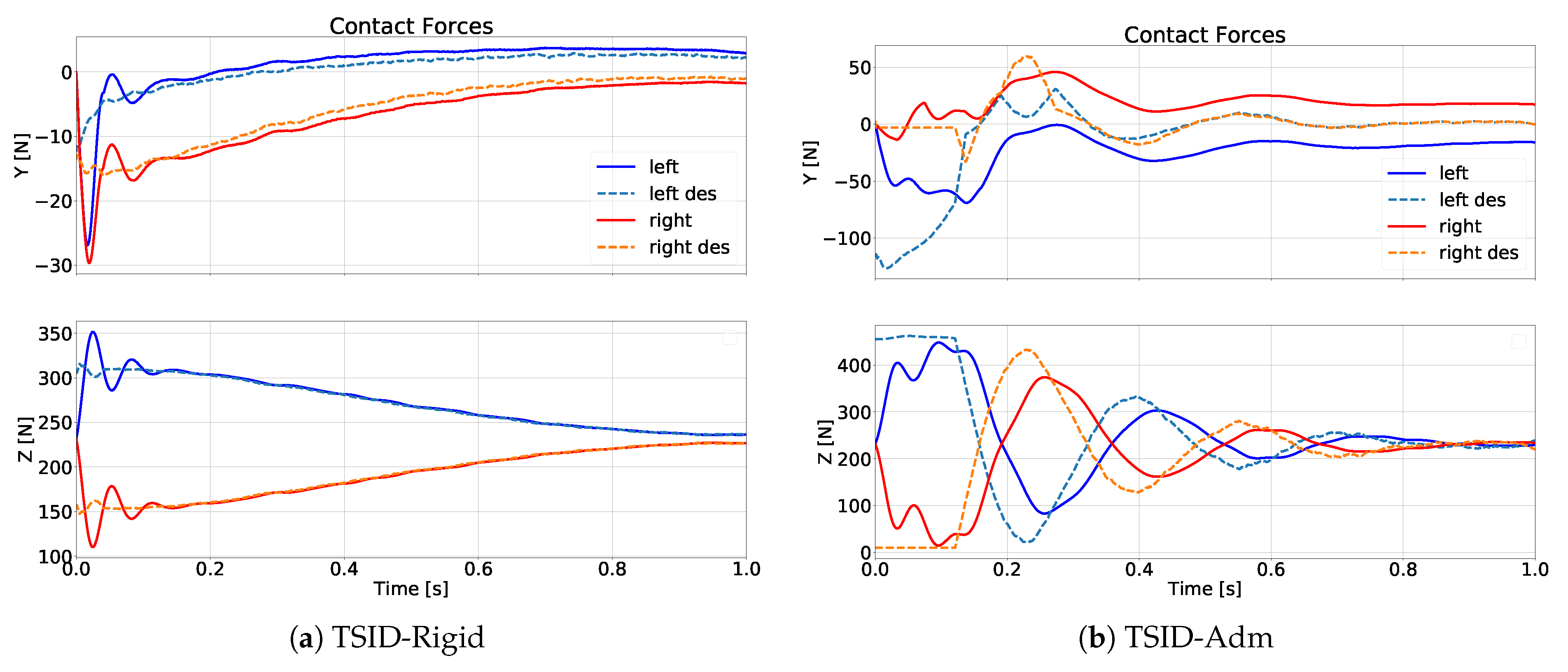
6.4. Test A: TSID-Rigid
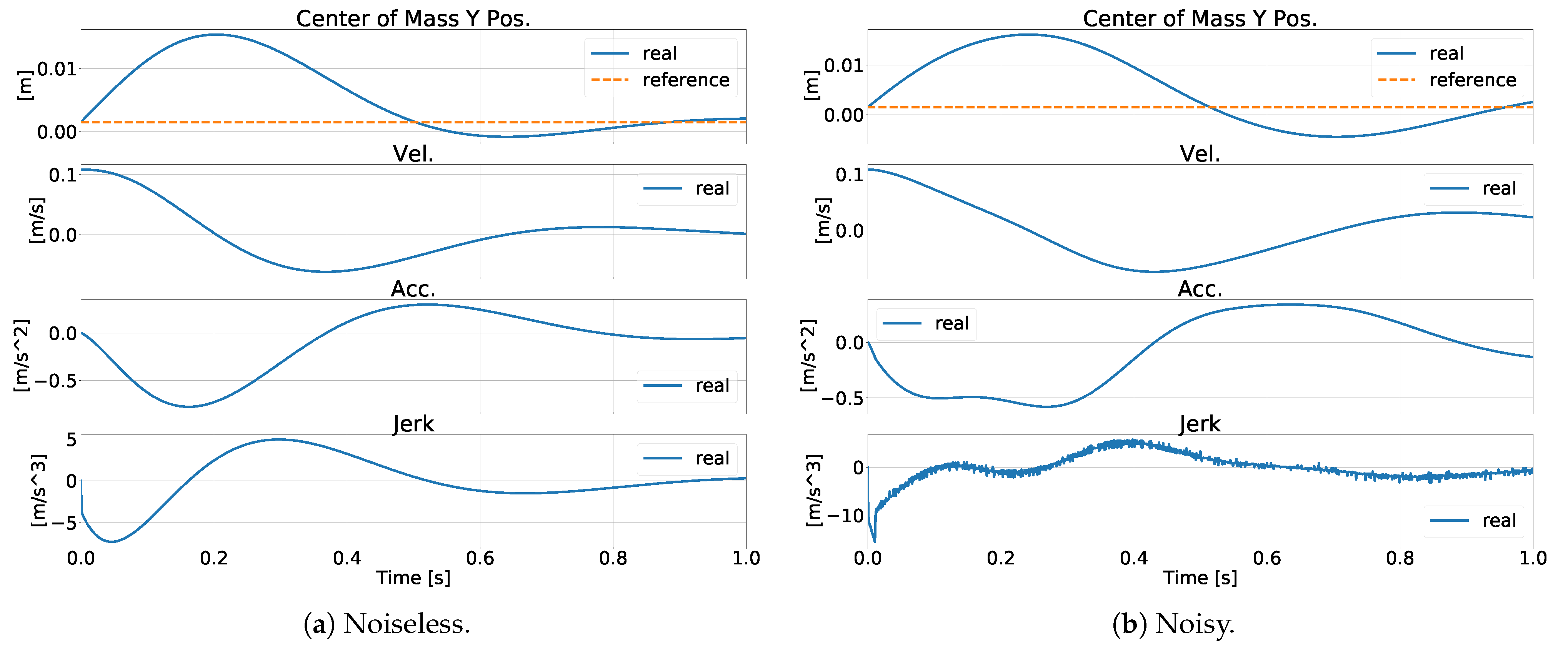
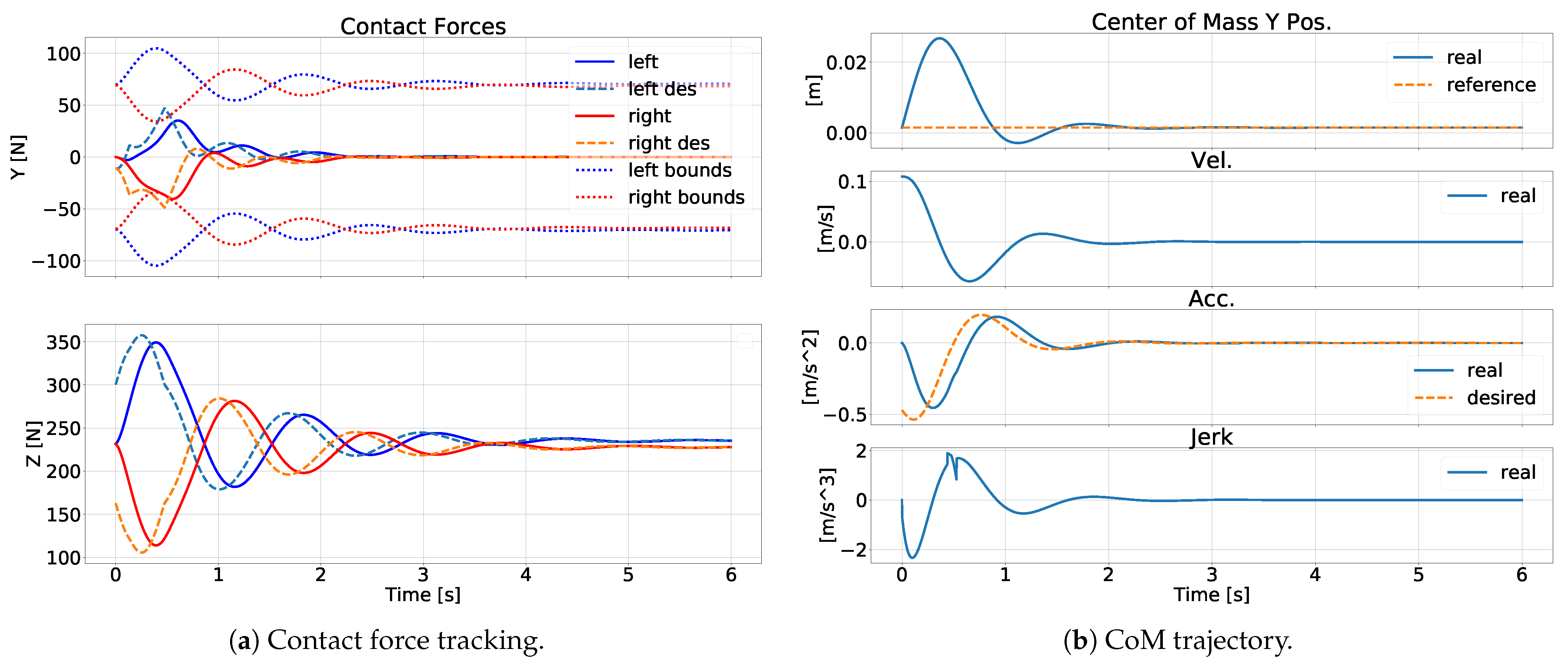
6.5. Test B: TSID-Flex-K and TSID-Adm
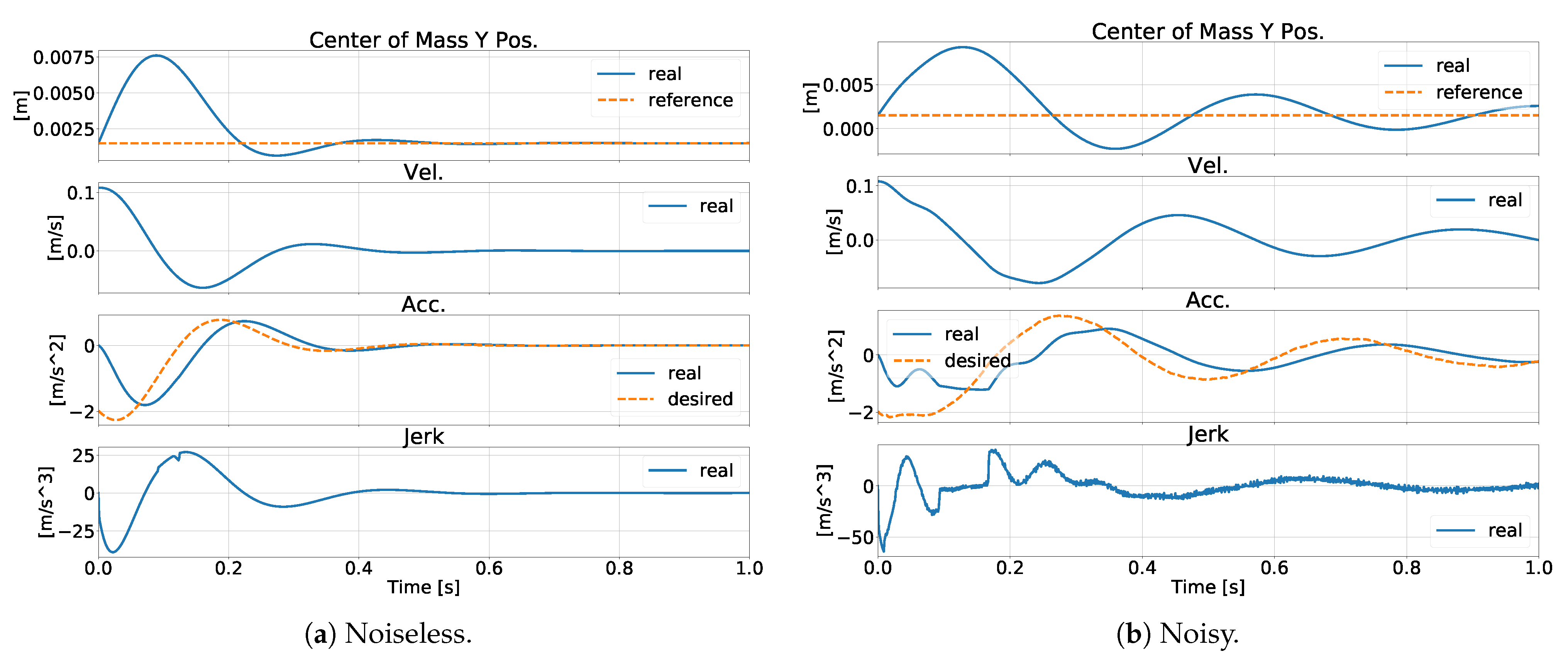
6.6. Test C: Adm-Ctrl
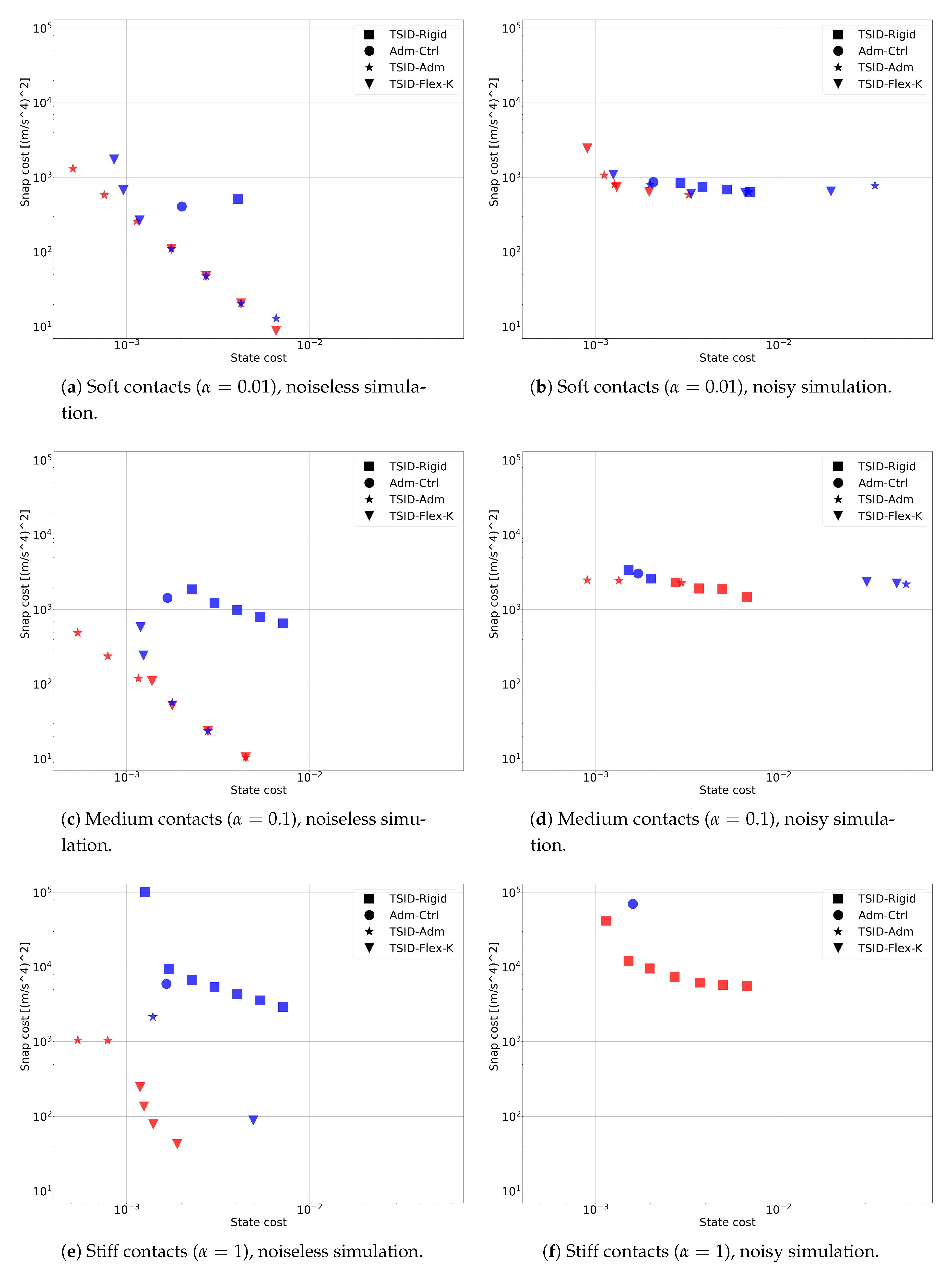
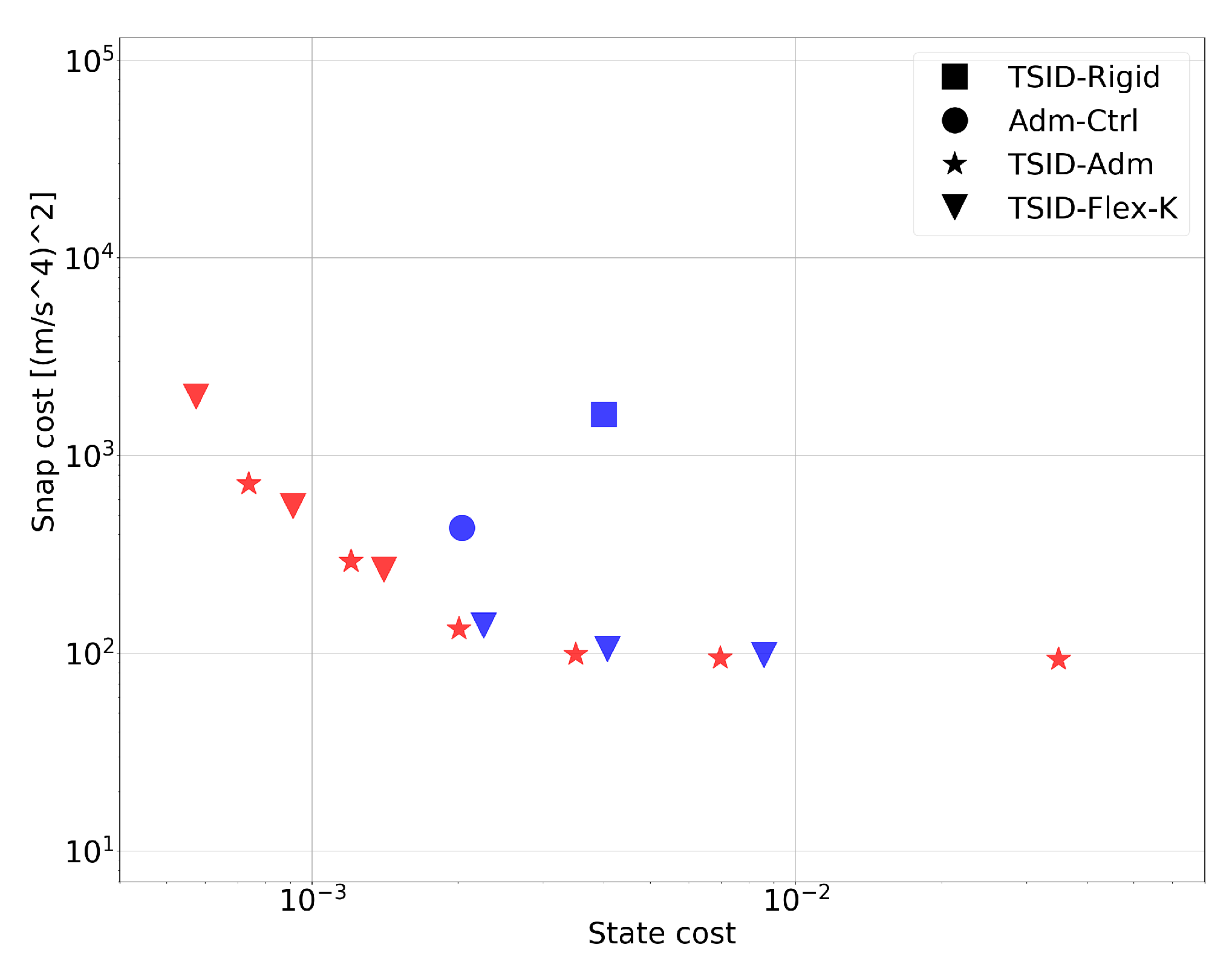
6.7. Test D: All Controllers
6.7.1. Soft Contacts
6.7.2. Medium Contacts
6.7.3. Stiff Contacts
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TSID | Task-Space Inverse Dynamics |
| CoM | Center of Mass |
| Adm-Ctrl | Admittance Control |
Appendix A. Gain Tuning
- the robot dynamical model is perfect,
- and are sufficiently small not to significantly affect the momentum task,
- the inequality constraints (e.g., friction cones) are not active.
Appendix A.1. TSID-Flex-K
Appendix A.2. Admittance Control
Appendix A.3. TSID-Admittance
- contact damping is negligible: ;
- and are diagonal matrices;
- all entries of , and corresponding to the same direction (X, Y, Z) have the same value; for instance, the admittance gain in direction Z must be the same for all contact points.
Appendix A.4. TSID-Rigid
Appendix A.5. Cost Function
- for TSID-Flex-K, and ,
- for TSID-Adm, and ,
- for TSID-Rigid, and .
Appendix B. Estimation
Appendix C. Order-of-Magnitude Analysis on Importance of Stiffness vs. Damping
References
- Wieber, P.B.; Tedrake, R.; Kuindersma, S. Modeling and Control of Legged Robots. In Handbook of Robotics, 2nd ed.; Siciliano, B., Oussama, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2015; Chapter 48. [Google Scholar]
- Boaventura, T.; Semini, C.; Buchli, J.; Frigerio, M.; Focchi, M.; Caldwell, D.G. Dynamic torque control of a hydraulic quadruped robot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MI, USA, 14–18 May 2012; pp. 1889–1894. [Google Scholar]
- Englsberger, J.; Ott, C.; Albu-Schäffer, A. Three-Dimensional Bipedal Walking Control Based on Divergent Component of Motion. IEEE Trans. Robot. 2015, 31, 355–368. [Google Scholar] [CrossRef]
- Herzog, A.; Rotella, N.; Mason, S.; Grimminger, F.; Schaal, S.; Righetti, L. Momentum control with hierarchical inverse dynamics on a torque-controlled humanoid. Auton. Robot. 2016, 40, 473–491. [Google Scholar] [CrossRef]
- Lim, H.O.; Setiawan, S.A.; Takanishi, A. Balance and impedance control for biped humanoid robot locomotion. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; Volume 1, pp. 494–499. [Google Scholar]
- Nava, G.; Romano, F.; Nori, F.; Pucci, D. Stability Analysis and Design of Momentum-based Controllers for Humanoid Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Deajeon, Korea, 9–14 October 2016. [Google Scholar]
- Takenaka, T.; Matsumoto, T.; Yoshiike, T.; Hasegawa, T.; Shirokura, S.; Kaneko, H.; Orita, A. Real time motion generation and control for biped robot-4 th report: Integrated balance control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 1601–1608. [Google Scholar]
- Kajita, S.; Morisawa, M.; Miura, K.; Nakaoka, S.; Harada, K.; Kaneko, K.; Kanehiro, F.; Yokoi, K. Biped walking stabilization based on linear inverted pendulum tracking. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 4489–4496. [Google Scholar]
- Li, Z.; Zhou, C.; Zhu, Q.; Xiong, R. Humanoid Balancing Behavior Featured by Underactuated Foot Motion. IEEE Trans. Robot. 2017, 33, 298–312. [Google Scholar] [CrossRef]
- Reher, J.; Cousineau, E.A.; Hereid, A.; Hubicki, C.M.; Ames, A.D. Realizing dynamic and efficient bipedal locomotion on the humanoid robot DURUS. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 1794–1801. [Google Scholar]
- Henze, B.; Roa, M.A.; Ott, C. Passivity-based whole-body balancing for torque-conrolled humanoid robots in multi-contact scenarios. Int. J. Robot. Res. 2016, 35, 1522–1543. [Google Scholar] [CrossRef]
- Azad, M.; Mistry, M.N. Balance control strategy for legged robots with compliant contacts. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 4391–4396. [Google Scholar]
- Fahmi, S.; Mastalli, C.; Focchi, M.; Semini, C. Passive Whole-Body Control for Quadruped Robots: Experimental Validation over Challenging Terrain. IEEE Robot. Autom. Lett. 2019, 4, 2553–2560. [Google Scholar] [CrossRef]
- Fahmi, S.; Focchi, M.; Radulescu, A.; Fink, G.; Barasuol, V.; Semini, C. STANCE: Locomotion Adaptation over Soft Terrain. IEEE Trans. Robot. 2020, 36, 443–457. [Google Scholar] [CrossRef]
- Orin, D.E.; Goswami, A.; Lee, S.H. Centroidal dynamics of a humanoid robot. Auton. Robot. 2013, 35, 161–176. [Google Scholar] [CrossRef]
- Hirai, K.; Hirose, M.; Haikawa, Y.; Takenaka, T. The development of Honda humanoid robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Leuven, Belgium, 16–20 May 1998. [Google Scholar]
- Caron, S.; Kheddar, A.; Tempier, O. Stair Climbing Stabilization of the HRP-4 Humanoid Robot using Whole-body Admittance Control. arXiv 2018, arXiv:1809.07073. [Google Scholar]
- Saccon, A.; Traversaro, S.; Nori, F.; Nijmeijer, H. On Centroidal Dynamics and Integrability of Average Angular Velocity. IEEE Robot. Autom. Lett. 2017, 2, 943–950. [Google Scholar] [CrossRef]
- Del Prete, A. Joint Position and Velocity Bounds in Discrete-Time Acceleration/ Torque Control of Robot Manipulators. IEEE Robot. Autom. Lett. 2018, 3, 281–288. [Google Scholar] [CrossRef]
- Kaneko, K.; Kanehiro, F. Design of prototype humanoid robotics platform for HRP. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Lausanne, Switzerland, 30 September–4 October 2002. [Google Scholar]
- Dallali, H.; Medrano-Cerda, G.A.; Focchi, M.; Boaventura, T.; Frigerio, M.; Semini, C.; Buchli, J.; Caldwell, D.G. On the use of positive feedback for improved torque control. Control. Theory Technol. 2015, 13, 266–285. [Google Scholar] [CrossRef]
- Paine, N.; Oh, S.; Sentis, L. Design and Control Considerations for High-Performance Series Elastic Actuators. IEEE/ASME Trans. Mechatron. 2014, 19, 1080–1091. [Google Scholar] [CrossRef]
- Rotella, N.; Herzog, A.; Schaal, S.; Righetti, L. Humanoid momentum estimation using sensed contact wrenches. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 556–563. [Google Scholar]
- Flayols, T.; Del Prete, A.; Wensing, P.; Mifsud, A.; Benallegue, M.; Stasse, O. Experimental Evaluation of Simple Estimators for Humanoid Robots. In Proceedings of the IEEE International Conference on Humanoid Robots (Humanoids), Birmingham, UK, 15–17 November 2017; pp. 889–895. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning | Value |
|---|---|---|
| Simulation time step | 0.0001 s | |
| Control time step | 0.001 s | |
| Force friction coefficient | 0.3 | |
| K | Contact stiffness | 200,000 |
| Contact damping ratio | 0.3 | |
| T | Simulation time | 6 s |
| Symbol | Controller | Meaning | Value |
|---|---|---|---|
| TSID-Flex-K | Postural task weight | 0.3 | |
| TSID-Adm | Postural task weight | 1 × 10−3 | |
| Adm-Ctrl | Postural task weight | 1 × 10−3 | |
| TSID-Rigid | Postural task weight | 1 × 10−2 | |
| TSID-Rigid | Force regularization weight | 1 × 10−4 | |
| Adm-Ctrl | Proportional momentum gain | 30.7 | |
| Adm-Ctrl | Derivative momentum gain | 10.3 | |
| Adm-Ctrl | Proportional joint position gain | ||
| Adm-Ctrl | Derivative joint position gain | 200 | |
| Adm-Ctrl | Proportional force gain | 8 × 10−3 | |
| All | Proportional posture gain | 10 | |
| All | Derivative posture gain | 6 |
| Symbol | Meaning | Value |
|---|---|---|
| Force sensor (Y axis) | 1.3 × 10−2 | |
| Force sensor (Z axis) | 1.0 | |
| Gyroscope | 6.4 × 10−3 | |
| Force sensor (Y axis) | 1.8 × 10−2 | |
| Force sensor (Z axis) | 7.3 × 10−2 | |
| Gyroscope | 1.0 × 10−3 | |
| Encoders | 8.2 × 10−5 |
| Symbol | Meaning | Value |
|---|---|---|
| CoM position measurement | 1 × 10−3 | |
| CoM velocity measurement | 1 × 10−2 | |
| Angular momentum measurement | 0.1 | |
| Force measurement | 1 | |
| Control | 1 × 104 | |
| CoM acceleration disturbance | 10 |
| PROS | CONS |
|---|---|
| TSID-Flex-K and TSID-Adm | |
| • Easy to tune (unified pos-force feedback). | • Need high frequency for hard contacts. |
| • Best for soft/medium contact. | • Unstable for hard contact with noise. |
| TSID-Rigid | |
| • Ok for hard/medium contacts. | • Unstable for soft contacts. |
| • Easy to tune (assuming perfect joint torque tracking). | • Undesired oscillations (no force feedback). |
| Adm-Ctrl | |
| • Always stable. | • Hard to tune/analyze. |
| • Good for soft contacts. | • Never the best. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Flayols, T.; Del Prete, A.; Khadiv, M.; Mansard, N.; Righetti, L. Reactive Balance Control for Legged Robots under Visco-Elastic Contacts. Appl. Sci. 2021, 11, 353. https://doi.org/10.3390/app11010353
Flayols T, Del Prete A, Khadiv M, Mansard N, Righetti L. Reactive Balance Control for Legged Robots under Visco-Elastic Contacts. Applied Sciences. 2021; 11(1):353. https://doi.org/10.3390/app11010353
Chicago/Turabian StyleFlayols, Thomas, Andrea Del Prete, Majid Khadiv, Nicolas Mansard, and Ludovic Righetti. 2021. "Reactive Balance Control for Legged Robots under Visco-Elastic Contacts" Applied Sciences 11, no. 1: 353. https://doi.org/10.3390/app11010353
APA StyleFlayols, T., Del Prete, A., Khadiv, M., Mansard, N., & Righetti, L. (2021). Reactive Balance Control for Legged Robots under Visco-Elastic Contacts. Applied Sciences, 11(1), 353. https://doi.org/10.3390/app11010353