Abstract
This paper aims to provide a novel insight into the influence of uncertainties in system- and pedestrian-induced load parameters on the vibration response of footbridges. The study begins with a sensitivity analysis for the vertical vibration response of a representative footbridge to two loading cases: a single pedestrian and a crowd. Two methods are utilized: the Sobol’-based global sensitivity analysis method and the local sensitivity analysis method. Uncertainties in all model parameters (which include bridge and human body dynamics in a walking posture, as well as dynamic force generated by humans) are considered in stochastic response estimation. Parametric analysis is then performed to investigate the influence of the variation of the mean values of the bridge modal mass, damping ratio, and natural frequency on the results of global and local sensitivity analysis. Systematic comparison of the results of global and local sensitivity analysis is performed to identify their similarities and differences. It has been found that the sensitive parameters and their importance ranking strongly depend on bridge modal properties and loading scenarios (i.e., a single pedestrian or a crowd crossing). The damping ratio and natural frequency of the human body are found to be the only two insensitive parameters. Therefore, they could be treated as deterministic parameters in the stochastic estimation of human-induced vibration. Global sensitivity analysis is recommended as a choice for the sensitivity analysis of pedestrian-induced vibration of footbridges as it leads to more reliable results, owing to the advantage of characterizing model sensitivity over the entire input spaces.
1. Introduction
The application of the lightweight high-strength construction materials enabled the design of slender and aesthetically remarkable footbridges [1,2]. Such structures are prone to excessive vibration under the excitation of walking pedestrian(s) [3,4]. Therefore, vibration serviceability assessment plays a key role in the design of modern footbridges [5].
For the vibration serviceability assessment of a slender footbridge with well-separated vibration modes, design standards routinely require the estimation of the vertical resonant response of the footbridge induced by an average pedestrian traversing the bridge. In such an analysis, the bridge is modeled, in the modal domain, as a single degree of freedom (SDoF) system representing a relevant mode. The walking force is assumed to be a harmonic force having the frequency that matches the natural frequency of the relevant vibration mode to create resonance. More advanced design guidelines also require estimation of the vibration response induced by a crowd [6,7]. In this case, the crowd-induced response is calculated by multiplying the resonant response to an average pedestrian by a factor that is a function of the number of pedestrians present on the bridge at any one time and, in some cases, the damping ratio of the bridge. The human–structure interaction (HSI) is usually excluded from the analysis, apart from a basic consideration that pedestrians contribute to the modal mass of the structure.
The dynamic properties and load parameters of a human–structure system are assumed to be deterministic in the analysis above. This leads to a deterministic estimation of vibration response. However, there are inherent uncertainties in load parameters that are due to the inter- and intra-subject variabilities of the pedestrian action. In addition, there unavoidably exist uncertainties in dynamic properties of the structure owing to the inherent uncertainties in the construction process of the structure. As a consequence, the resultant vibration response is difficult to predict accurately. Recently, probability-based human-induced vibration estimation in footbridges by taking into account uncertainties in load parameters has drawn increasing attention [8,9,10,11,12], as it has become clear that stochastic, rather than deterministic, assessment of human-induced vibration response is more suitable for vibration serviceability assessment.
In the last four decades, great efforts have been devoted to experimental characterization of the uncertainties in walking-force parameters [1,13,14,15,16,17,18,19,20,21,22,23,24,25]. The mean value and coefficient of variation (COV) for step frequency, step length, and pedestrian weight obtained by various researchers are summarized in Table 1. The dynamic load factor was found to correlate with step frequency in the references [13,26], while in the study [5] the dynamic load factor was assumed as an independent variable following the normal distribution with a mean value of 0.35 and a COV of 20%. The normal distribution parameters expressed using the two parameters will be presented in short form hereafter, in this case being N (0.35, 20%).

Table 1.
Stochastic properties of load parameters.
Accurate estimation of human-induced vibration in footbridges may also require taking HSI into account [4,27,28]. In the modeling of HSI, the human body in a walking posture is usually modeled as a SDoF mass-damper-spring system [4,29,30,31,32]. Several experiments have been conducted to determine the dynamic properties of a human body in a walking posture [33,34,35,36]. The results show that the natural frequency and damping ratio vary significantly from person to person and between different studies, ranging from 1.25 Hz to 3 Hz and from 28% to 70%, respectively. In addition, some studies found that the human body’s natural frequency and damping ratio are either related to step frequency [33,34] or walking speed [36]. Rather than by fixed values or intervals, the human body’s natural frequency measured by Shahabpoor et al. [37] was described by a normal distribution N (2.86 Hz, 12%). They also concluded that the damping ratio follows the normal distribution N (29.5%, 16%). Jiménez-Alonso and Sáez [38] also described the measured natural frequency and damping ratio by normal distributions: N (2.76 Hz, 6%) and N (47%, 6%), respectively. In addition, an inverted pendulum model [39,40] and bipedal model [41,42] were also employed to account for HSI, which are not considered in the paper.
Given that there are inherent uncertainties in the construction process of the structure, the natural frequencies, modal mass (corresponding to modal shapes normalized to the largest component equal to unity), and damping ratios of a bridge are also random parameters. The COVs of the fundamental natural frequency and modal mass are usually no more than 10% [5], while the COV for the damping ratio could be relatively large, ranging from 4% to 25% [43]. Note that experiments for stochastic characterization of uncertain parameters in a human–structure system usually require a significant number of test subjects, a large number of trials, and expensive test facilities, making them time consuming and expensive.
Recently, increasing attention has been paid to the sensitivity of human-induced vibration response of a footbridge to uncertainties in the system and load parameters. Sensitivity analysis aims to study how variations in model outputs may be attributed to model inputs. It informs selection of influential parameters required for analyzing uncertainty propagation in stochastic response estimation, as well as for experimental characterization of randomness. This analysis therefore results in significant savings in computational effort in stochastic response estimation, as well as in reducing the cost of experimental characterization. Wei et al. [44] used a polynomial chaos-expansion-based global sensitivity analysis (GSA) method to determine the influence of uncertainties in the mechanical properties of fiber-reinforced polymer (FRP) components on the vibration response of an FRP footbridge exposed to a single pedestrian crossing. They found that the influence of the uncertainties could be neglected on the investigated footbridge. Van Nimmen et al. [45] focused on the influence of variations in a footbridge’s natural frequency on the estimated response caused by a crowd crossing. The vibration response was estimated according to design guides SETRA [6] and HIVOSS [46], in which the walking force is treated as a deterministic, uniformly distributed load. It was found that for bridges with a frequency of no more than the second harmonic of the walking force, a COV of 10% for natural frequency may lead to a big scatter of estimated peak acceleration responses, e.g., ranging from 1.4 to 5.2 . Caprani et al. [47] evaluated the stochastic response of a virtual footbridge with dynamic properties treated as deterministic parameters while a single pedestrian loading was modeled as a stochastic force model. The uncertainties in step frequency, step length, and weight of pedestrian were considered. They found the estimated footbridge acceleration response is most sensitive to the step frequency. Similarly, Pedersen and Frier [8] studied the sensitivity of footbridge response to step frequency, walking speed, pedestrian weight, and dynamic load factor characterizing a single pedestrian and concluded that the step frequency is the most influential parameter. Shahabpoor et al. [29] examined the impact of the mass, natural frequency, and damping ratio of the human body and a pedestrian’s walking speed, as well as the pedestrians’ arrival rate on the multi-pedestrian-induced footbridge response experienced by walking pedestrians rather than at a fixed location. The HSI was considered by modeling each pedestrian as an SDoF system. The results showed that the footbridge acceleration response is most sensitive to a human body’s frequency in cases when this frequency is close to the bridge frequency. The sensitivity of the response to the other four parameters was significantly lower. More specifically, a 30% variation in one of these four parameters changed the response up to only 10%, whereas a 10% variation in a human body’s frequency can achieve the same effect.
The existing literature provides an incomplete picture of the sensitive parameters, i.e., parameters that strongly influence footbridge vibration response. This is mainly due to the fact that only partial uncertainties were examined, i.e., either uncertainties in the parameters of the structure, or human-induced dynamic force, or human body dynamics. Another possible reason is the choice of the local sensitivity analysis (LSA) in the existing research. LSA is a one-at-a-time technique, evaluating variations in model outputs with respect to one input, with the remaining parameters fixed [48]. For an explicit input–output mapping relationship, the local sensitivity of the output may be defined as the partial derivative of the output with respect to one input of interest. A local sensitivity index is only valid in the vicinity of the base point where it is evaluated and may vary with the location of the base point [49]. Hence, LSA provides only a limited insight into model sensitivity and may lead to inconsistent sensitivity analysis results. A third possible reason is that the results from sensitivity analysis may vary with the input spaces of uncertain parameters. In existing literature, different stochastic distributions or intervals were employed for the same uncertain parameters by different researchers.
The contribution of this paper is to provide a more conclusive insight into the sensitivity of a pedestrian-induced vibration response. More specifically, stochastic vibration responses of a representative footbridge induced by a single pedestrian or a crowd walking are first estimated. Uncertainties in the dynamic properties of the structure and a human body, as well as parameters of human-induced load, are all included, which belong to aleatory uncertainty. The epistemic uncertainty, such as the uncertainty in distribution types of parameters, are out of the scope of the paper. The HSI is taken into account by modeling the human body as an SDoF system in conjunction with a vertical ground reaction force crossing the bridge at a constant speed. The crowd is assumed to constitute spatially unrestricted pedestrian traffic (characterized by a relatively low traffic density in which each person is free to choose a walking speed independently from the other pedestrians). GSA is then carried out using the Sobol’ method to investigate the influence of uncertainties in the system and load parameters. In this analysis, all parameters are varied simultaneously over the specified input space. As a result, the contributions of each individual parameter and the interactions between parameters to model output are evaluated simultaneously. GSA provides more reliable results than LSA by characterizing the response sensitivity across the entire input space. Then, parametric analysis is conducted to study the influence of the input spaces of bridge modal mass, damping ratio, and natural frequency on the results of GSA. In addition, LSAs are also performed in all cases so that the similarities and differences between GSA and LSA can be observed and evaluated.
The layout of this article is as follows. This introductory section is followed by Section 2, which briefly introduces the Sobol’ method. Section 3 presents the estimation methods for the vertical vibration response of a footbridge induced by a single pedestrian and a crowd. In Section 4, sensitivity analysis is carried out to reveal the global and local sensitivity of the acceleration response of a representative footbridge to the two load cases. Parametric analysis is performed in Section 5 to investigate how the variations in the input spaces of modal mass, damping ratio, and natural frequency of the footbridge affect the results of GSA and LSA. The discussion is presented in Section 6. The concluding remarks are given in Section 7.
2. The Sobol’ Method
This section presents a brief introduction of the Sobol’ method. A detailed description of the method can be found elsewhere [50].
2.1. Formulation of the Sobol’ Method
The model under investigation may be described by the following function:
where is a scalar model output and is a vector of model inputs.
It is assumed that is square integrable. In addition, the input parameters are assumed to be independent, random, and within the unit hypercube (i.e., and is the unit interval [0, 1]). This incurs no loss of generality because any space of a random variable can be transformed onto this unit hypercube.
The right-hand side of Equation (1) can be decomposed into the form of ANOVA-representation [51]:
if for and It follows that the summands in Equation (2) are orthogonal and can be expressed as the integrals of . The physical meanings of the summands are: represents the average of the model , describes the main effect of input , represents the effect of the interaction between and , and so on.
Squaring Equation (2) and integrating over , we can deduce that the variance of model output can be decomposed into fractions which are contributed by the sets of inputs:
where is the variance of model output. is the variance corresponding to input , is the variance contributed by both inputs and , and so on.
The Sobol’ indices can be defined as:
where is the first-order sensitivity index (FSI) that measures the contribution of alone to the output variance . is the second-order sensitivity index that measures the contribution of the terms involving the interaction between and to the total variance , and so on. Each sensitivity index is in the range from 0 to 1. The sum of all of sensitivity indices is equal to 1.
In addition, a total sensitivity index (TSI), measuring the contribution of the input and all the possible joint terms between and all the other inputs, may be given by:
where is TSI for input . represents the total variance uncorrelated to input . Usually, the larger the TSI of an input, the more influence it has on the model output. In addition, the difference between the FSI and TSI of a parameter is accounted by its interaction with other parameters.
Let , be an arbitrary subset of and is the complementary set. Thus, . Let . The variance corresponding to input can be defined as [50]:
Similarly, can be defined. The FSI and TSI of subset then can be expressed as:
Equations (7) and (8) become Equation (4) (the first equation) and Equation (5), respectively, when .
2.2. Implementation of the Sobol’ Method
The variances , , and can be calculated using a Monte Carlo algorithm as [50]:
where is the number of Monte Carlo trails, which should be large enough to ensure convergence. To perform Equations (10) and (11), () needs to be sampled twice for each simulation, such that and ( and ) are independent from each other. represents the sample of in the first sampling for the th simulation and represents the sample of in the second sampling for the th simulation. Similarly, and can be defined.
3. Pedestrian-Induced Vibration Analysis for Footbridges
This section describes the approaches for estimating the vibration response of a footbridge induced by a single pedestrian and a crowd. The footbridge is modeled as an SDoF system associated with a relevant vibration mode, and the influence of a pedestrian walking on a footbridge is modeled as another SDoF system in conjunction with a ground reaction force crossing the bridge at a constant speed.
3.1. Estimation of the Vibration Response Induced by a Single Pedestrian
The equations of motion of a footbridge with a single pedestrian crossing may be written as [4]:
where:
, , and are the modal mass (kg), damping ratio (%), and natural frequency (Hz) of the footbridge, respectively, while , , and are the mass (kg), damping ratio (%) and natural frequency (Hz) of the pedestrian, respectively. and are the modal displacements of the footbridge and pedestrian, respectively. is the walking force. , and are the weight (N), dynamic load factor, and step frequency (Hz) of the pedestrian, respectively. is the mode shape of the bridge and is the walking speed, which is the product of step frequency and step length . and are the second-order and first-order derivatives of with respect to time .
3.2. Estimation of the Vibration Response Induced by a Crowd
Consider a crowd of pedestrians crossing a footbridge in one direction. Pedestrian arrival is assumed to be a Poisson process. This means that the time lag () between pedestrians follows an exponential distribution [52]. The equations of motion of a footbridge with a crowd crossing are [4]:
where:
The submatrices in Equation (13) are defined as follows:
where , , , , , , , , and , are the mass, damping ratio, natural frequency, walking speed, modal displacement, weight, dynamic load factor, step frequency, and phase angle for the -th pedestrian, respectively. The arrival time of the -th pedestrian on the bridge can be expressed as . The departure time of the -th pedestrian off the bridge can be expressed as . , and are the bridge length, step length of the -th pedestrian, and time lag between the -th pedestrian and the -th pedestrian, respectively. The definitions of the other variables have been given in Section 3.1.
4. Sensitivity Analysis of the Vibration Response of a Representative Footbridge
This section presents the GSA and LSA of the vibration response of a representative footbridge induced by a single pedestrian and a crowd. The representative footbridge is an idealized bridge, having a span of 50 m and a deck width of 2 m, which is typically employed in numerical examples in the literature related to human-induced vibration [4,5].
4.1. Representative Values for System and Load Parameters
The first vertical mode of the bridge is considered only. Thus, the mode shape is a half-sine function. According to the database of measured dynamic properties of 138 footbridges summarized by Wei et al. [53], the mean value for the modal mass, damping ratio, and fundamental frequency of the representative footbridge can be assumed to take values of 40,000 kg (based on a representative mass per deck area of 800 ), 1% and 2 Hz, respectively. The COVs for the modal mass and fundamental frequency of the footbridge are both assumed to be 10%, while the COV for the damping ratio is doubled because of the usually larger uncertainty in damping identification.
The pedestrian-generated dynamic load from Section 3 is a harmonic function characterized by force amplitude ( times ), step frequency , and step length in the case of a single pedestrian. There are two additional parameters, phase angle and time-lag , in the case of a crowd. The dynamic model for a walking pedestrian is characterized by the mass ( divided by gravitational acceleration), natural frequency , and damping ratio . The mean and COV values for step frequency, step length, weight, damping ratio, and natural frequency of a single pedestrian are assigned the average measured values reported in the literature and summarized in Section 1. They are listed in Table 2. The pedestrian density is set to be 0.3 pedestrians of deck area, which corresponds to free (i.e., spatially unrestricted) walking [54]. All the parameters characterizing dynamic properties and dynamic load are assumed to follow the normal distribution, except the phase angle and time lag between pedestrians. The phase angle is assumed to obey the uniform distribution between 0 and 2 [4]. The time lag between pedestrians follows an exponential distribution with a mean value of 1.2 s, which is the reciprocal of mean arrival rate of 0.84 pedestrians/s. Such an arrival rate corresponds to an average pedestrian density of 0.3 pedestrians for a crowd walking, on average, at a walking speed of 1.4 m/s (which is equal to the mean step frequency of 2 Hz multiplied by the mean step length of 0.7 m). In addition, the mean value and COV of the dynamic load factor are in agreement with those provided by Tubino et al. [5], in which the dynamic load factor was assumed to independent of step frequency. All parameters in Table 2 are assumed to be mutually independent random variables. Since the fundamental frequency of the bridge is in the range of the step frequency of a normal-walking pedestrian, only the first-order harmonic of the walking force is considered when estimating human-induced vibration. In the case of a single pedestrian, the input parameters for sensitivity analysis are the step frequency , step length , dynamic load factor , weight , damping ratio , and natural frequency of the pedestrian, and the fundamental frequency , damping ratio , and modal mass of the footbridge. For the case of a crowd, there are two additional inputs: phase angle and time lag . In both cases, the model output for sensitivity analysis is the maximum of one-second root-mean-squared (RMS) acceleration at the mid-span of the footbridge. Based on the input and output parameters mentioned above, the sensitivity analysis of the human-induced footbridge response can be carried out using the Sobol’ method and the local sensitivity analysis method.
Table 2.
Statistical characteristics of system and load parameters.
4.2. Vibration Response Induced by a Single Pedestrian
The vibration response of the footbridge induced by a single pedestrian is estimated by solving Equation (12) using the Newmark- numerical integration method [55]. Due to the step frequency and step length of pedestrian are random variables, the time to cross a 50 m long bridge is different for each pedestrian. Therefore, the time duration for each simulation is different, which is set to be 110% of the time for crossing the bridge to ensure the time history experiencing peak response and then decaying to a low response level at the end [4]. Monte Carlo simulations based on low-discrepancy sequences are conducted. It is found that the results of the sensitivity analysis are almost unchanged with a simulation size larger than 5000. Therefore, 10,000 Monte Carlo simulations are performed for reliable results.
4.2.1. Global Sensitivity Analysis
In this paper, the aim of the sensitivity analysis is to identify and rank the parameters that influence the vibration response most. Both FSI and TSI from GSA could be employed for distinguishing between sensitive and insensitive parameters, but a literature search does not provide consistent thresholds for either. For example, Tang et al. [56], Coppitters et al. [57], and Hsieh et al. [58] considered parameters of an FSI below 0.01, 0.02, and 0.05, respectively, to be insensitive. By contrast, Zhang et al. [59] and Chan et al. [60] employed a TSI with threshold values of 0.05 and 0.3, respectively. Although FSIs are frequently utilized for parameter selection and ranking, they are insufficient to characterize parameter importance when there are strong parameter interactions [50]. Hence, the selection and ranking of sensitive parameters in this paper are decided using a TSI threshold value of 0.07. However, both FSI and TSI will be calculated and presented.
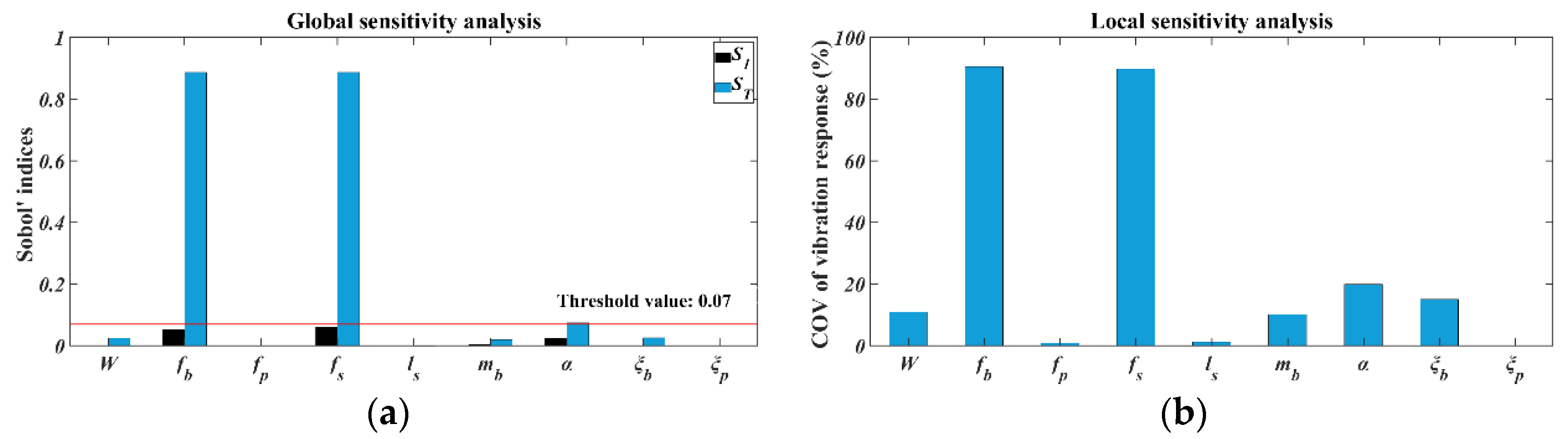
The FSIs and TSIs of the maximum of one-second RMS acceleration at the mid-span to all the parameters are calculated using the Sobol’ method described in Section 2. The results from GSA are depicted in Figure 1a, where and denote the FSI and TSI, respectively. According to the TSIs, the bridge’s natural frequency is the most important parameter, followed closely by step frequency and then dynamic load factor, while the TSI for other parameters is less than 0.07 and is of little importance. The interactions between the uncertain parameters can be detected according to the difference between TSI and FSI, owing to the fact that TSI can measure the contributions of an uncertain parameter, as well as of the interactions between this parameter and all other parameters to the variation of vibration response, but FSI measures the contribution of this parameter only. It can be found that the TSIs for a bridge’s natural frequency and step frequency are significantly larger than their first-order counterparts. This indicates a strong interaction between these two parameters, which is accounted for by the high probability of occurrence of resonance with a step frequency close to the bridge’s natural frequency.
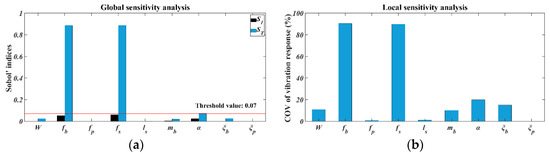
Figure 1.
The results from GSA and LSA of the vibration response of a representative footbridge induced by a single pedestrian: (a) the Sobol’ indices for system and load parameters; and (b) the COV of vibration response when one of the system and load parameters varies.
4.2.2. Local Sensitivity Analysis
In this section, LSA for vibration response of the representative footbridge under the excitation of a single pedestrian is carried out. Specifically, one input parameter varies at a time according to its statistical characteristics and the other inputs are kept at their nominal values. The corresponding COV for the vibration response of the bridge, estimated using the Monte Carlo simulation method, is then calculated. Note that the LSA can only produce qualitative results [48], i.e., ranking the input parameters. In other words, it is impossible to establish a quantitative criterion to distinguish important from unimportant parameters. For the sake of comparing the results of GSA and LSA, a top few parameters ranked by LSA are considered as the sensitive parameters as much as those given by GSA.
Figure 1b presents the results of LSA for vibration response induced by a single pedestrian. By comparing with Figure 1a, it can be found that the result of LSA is similar to the TSIs, rather than the FSIs, from the GSA. This is mainly due to the fact that for an uncertain parameter, both the TSI and the result of LSA simultaneously measure the contributions of this parameter as well as of the interactions between this parameter and all other parameters to the variation of vibration response, while the FSI only measure the contribution of this single parameter. The results of LSA show that the bridge natural frequency is the most important parameter, followed by step frequency and then dynamic load factor. This agrees with the conclusion from GSA. However, LSA cannot identify the interactions between the uncertain parameters as the same as the GSA.
Note that a 95th percentile of the peak of one-second RMS acceleration of the 10,000 cases for each analysis in the GSA and LSA in Section 4.2 is in the range of 0.16 to 0.23 .
4.3. Vibration Response Induced by a Crowd
The vibration response of the footbridge induced by a crowd is computed using the same numerical integration method to solve Equation (13). To ensure a long-enough duration of steady-state pedestrian flow, i.e., the period after the departure time of the first pedestrian off the bridge and before the arrival time of the last pedestrian on the bridge, the number of people in a crowd is set to be 150. In this case, the maximum of one-second RMS acceleration exhibits no obvious variation during this period. Due to the randomness in the pedestrian step frequency, step length and time-lag between pedestrians, the time required for a crowd to cross the bridge is different each time. Therefore, the time duration for each simulation is set to be the time for a crowd to cross the bridge completely. Again, 10,000 Monte Carlo simulations are conducted.
4.3.1. Global Sensitivity Analysis
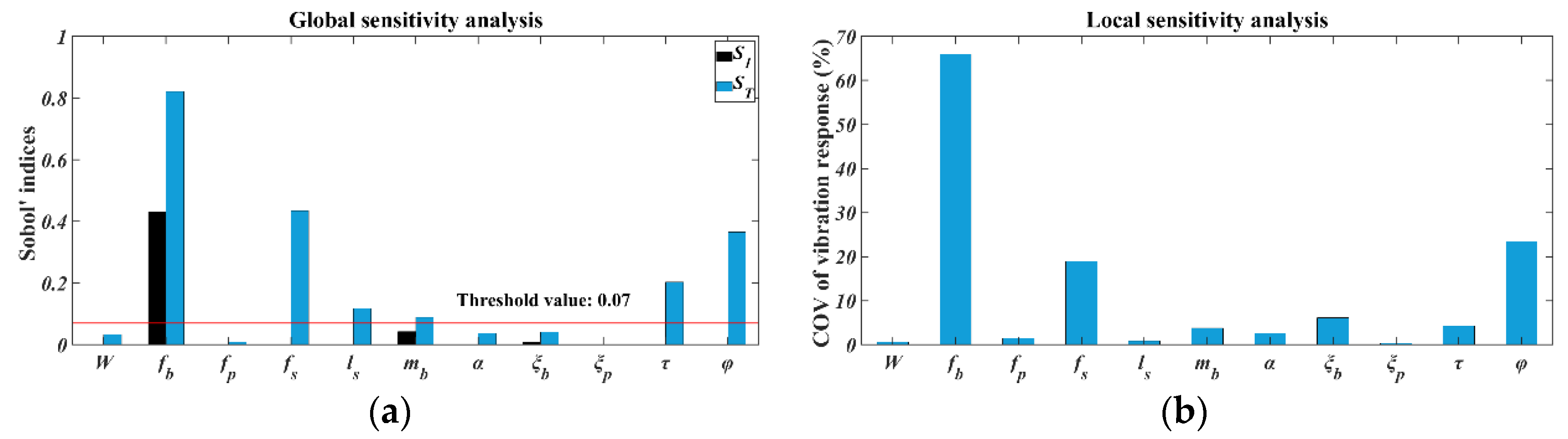
The FSIs and TSIs for the system and load parameters are shown in Figure 2a. The sensitive parameters, in descending order (of TSI), are the bridge natural frequency, step frequency, phase angle, time lag, step length, and bridge modal mass. Hereafter, the sensitive parameters are listed in descending order by default. Compared with the case of a single pedestrian, the dynamic load factor loses on significance. In addition, there are big differences between the TSIs and FSIs for the bridge’s natural frequency, step frequency, phase angle, and time lag because of the interactions between these four parameters. It should be noted that for a system with nonlinearity like the one in this paper, TSI is recommended to measure the sensitivity of uncertain parameters instead of FSI. This is because the FSI cannot evaluate interactions from nonlinear effects, which may lead to the misleading result.
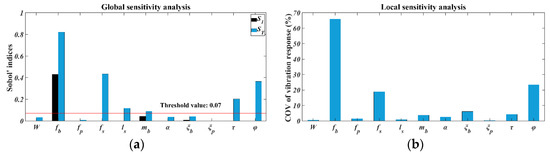
Figure 2.
The results from GSA and LSA of the vibration response of a representative footbridge induced by a crowd: (a) the Sobol’ indices for system and load parameters; and (b) the COV of vibration response when one of the system and load parameters varies.
4.3.2. Local Sensitivity Analysis
The results from LSA are shown in Figure 2b. The most influential parameter is the bridge’s natural frequency, followed by phase-angle and then step frequency. The bridge damping ratio, time lag, and bridge modal mass are the least sensitive parameters. The other parameters are of little influence. Comparison of the results in Figure 2a,b shows that LSA and GSA differ in ranking the parameters. This inconsistency may be attributed to the fact that a local sensitivity index is estimated only in the vicinity of the nominal point, leading to the incomplete investigation of the full input space, while GSA produces an estimation of model sensitivity over the full input space including the nominal point. As a consequence, GSA, rather than LSA, is recommended as a choice for the sensitivity analysis of the pedestrian-induced vibration of footbridges. This is owing to the fact that the results of LSA may not include the effects of interactions between uncertain parameters in the unexplored input space, while GSA does not have this problem and therefore leads to more reliable results.
Note that a 95th percentile of the peak of one-second RMS acceleration of the 10,000 cases for each analysis in the GSA and LSA in Section 4.3 is in the range of 0.61 to 2.64 .
5. Parametric Analysis of the Input Spaces of Modal Mass, Damping Ratio, and Natural Frequency
The GSA and LSA presented in Section 4 are for a particular footbridge. To provide more robust insight, the sensitivity analysis for different footbridges is performed in this section. It includes both GSA and LSA for the vibration response of footbridges with different mean values of modal mass, damping ratio, and natural frequency.
5.1. Natural Frequency
The footbridges with a natural frequency up to 3 Hz may be strongly excited by the first-order harmonic of a pedestrian’s walking force. Thus, six footbridges with different mean natural frequencies from 0.5 Hz to 3 Hz (with a step size of 0.5 Hz) are considered in the parametric analysis. The natural frequency of these six footbridges is described by normal distribution: N (0.5–3 HZ, 10%). The statistical characteristics for the other parameters are taken from Table 2. These six footbridges are referred to as Bridge Series A.
5.1.1. Vibration Response Induced by a Single Pedestrian
Global Sensitivity Analysis
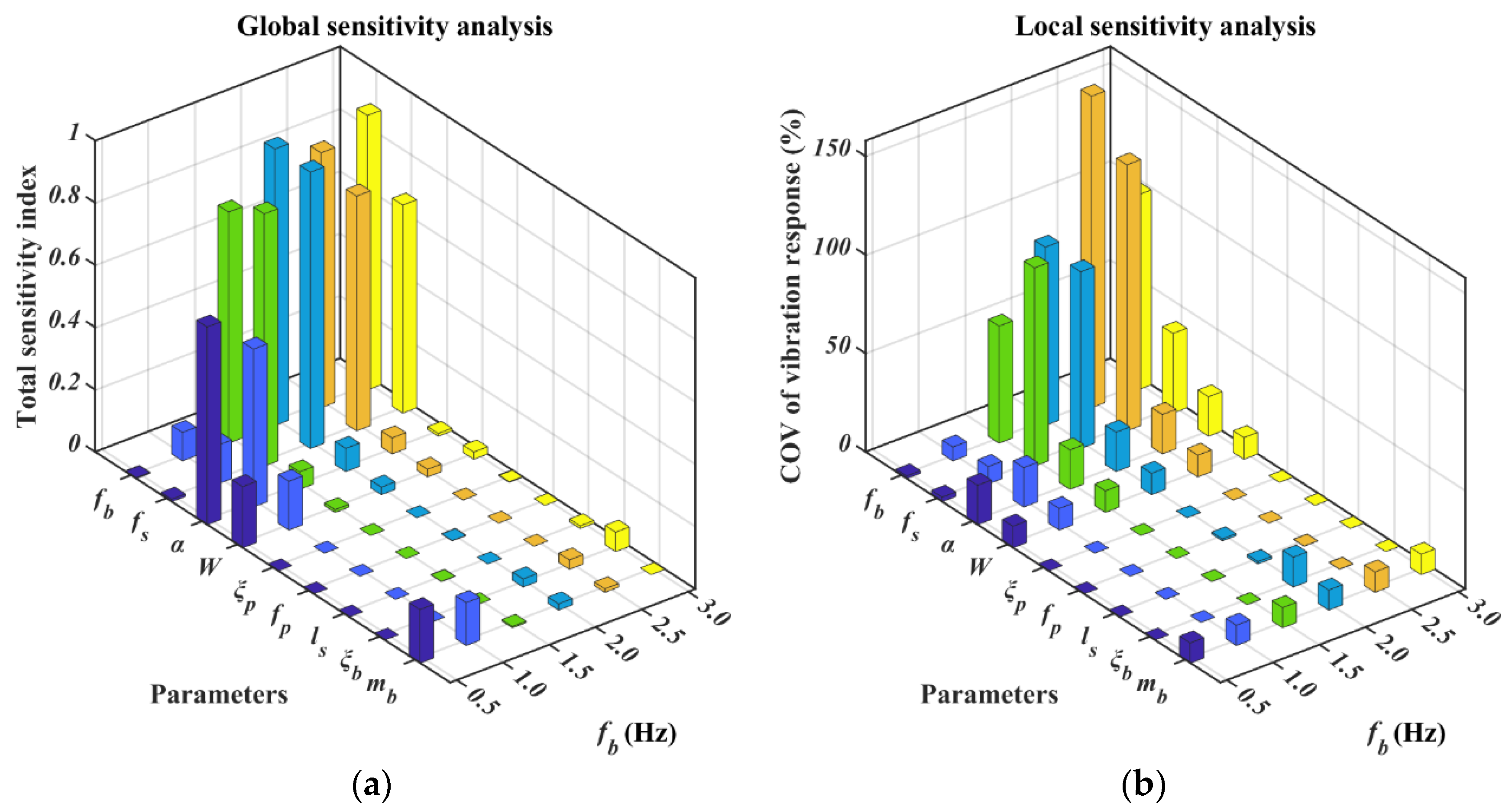
The generated TSIs for Bridge Series A are presented in Figure 3a, leading to the following observations:
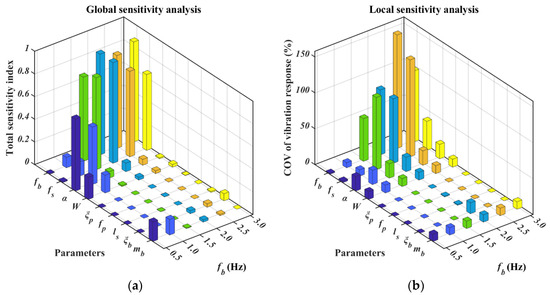
Figure 3.
The results from GSAs and LSAs of the vibration response of Bridge Series A with a single pedestrian crossing: (a) the TSIs for system and load parameters; and (b) the COV of vibration response when one of the system and load parameters varies.
- For the bridges with the mean natural frequency of 0.5 Hz, the vibration responses are most sensitive to dynamic load factor, followed by pedestrian weight and then bridge modal mass. For the bridges with the mean natural frequency of 1 Hz, there are two additional sensitive parameters step frequency and bridge natural frequency.
- For the bridges with the mean natural frequency no smaller than 1.5 Hz, the variations in step frequency and bridge natural frequency have most significant impact on the vibration response. The dynamic load factor becomes the third sensitive parameter for the bridges with the mean natural frequency of 2 Hz.
Local Sensitivity Analysis
The results of LSAs for Bridge Series A are presented in Figure 3b. The sensitivity of parameters and their ranking agree with those from GSA.
The results from GSA and LSA suggest that the parameters that influence vibration response most strongly depend on the natural frequency of the bridge, or more precisely, its closeness to the step frequency and therefore likelihood of exciting the resonance.
Note that a 95th percentile of the peak of one-second RMS acceleration of the 10,000 cases for each analysis in the GSA and LSA in Section 5.1.1 is in the range of 0.01 to 0.23 .
5.1.2. Vibration Response Induced by a Crowd
Global Sensitivity Analysis
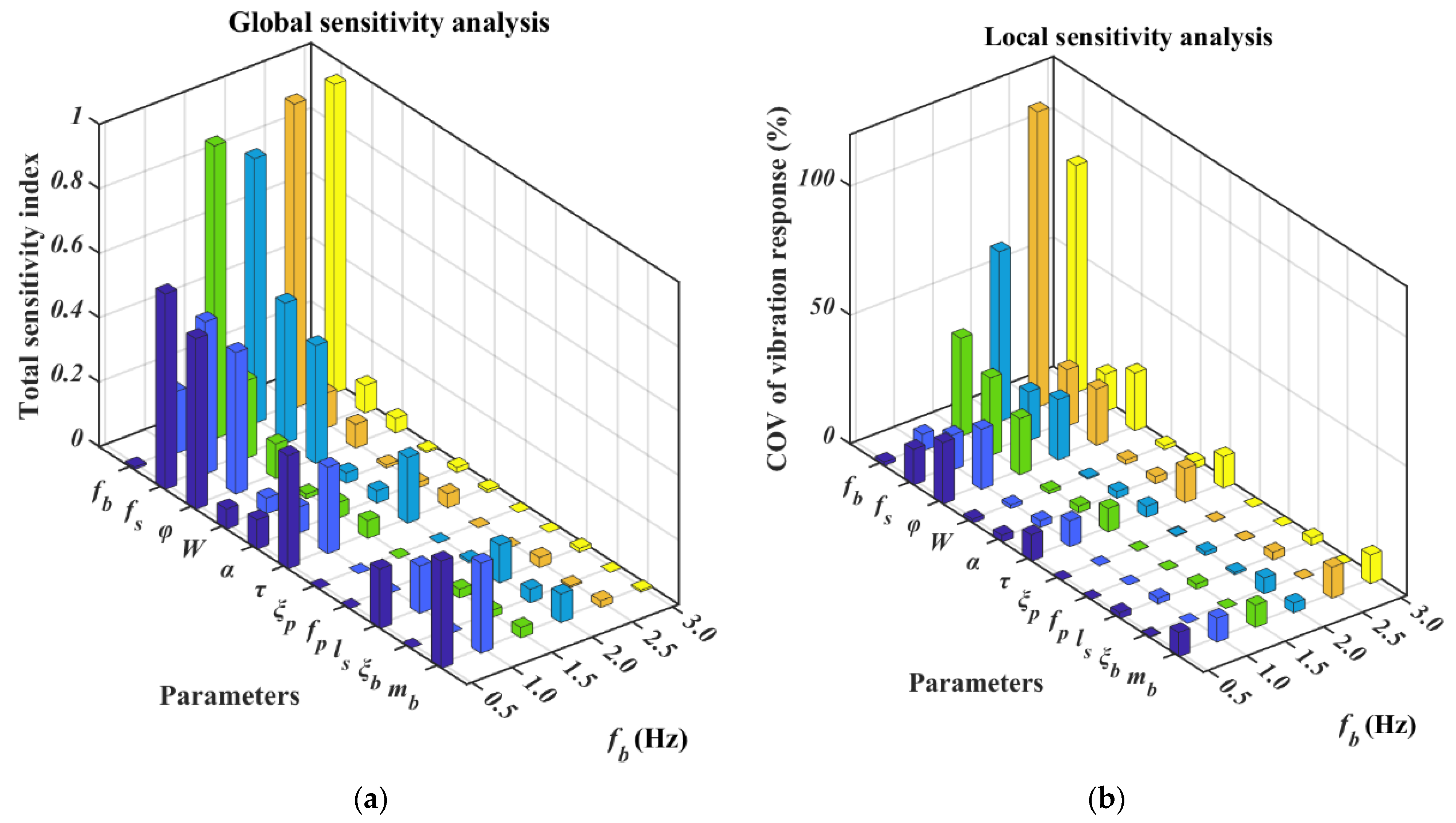
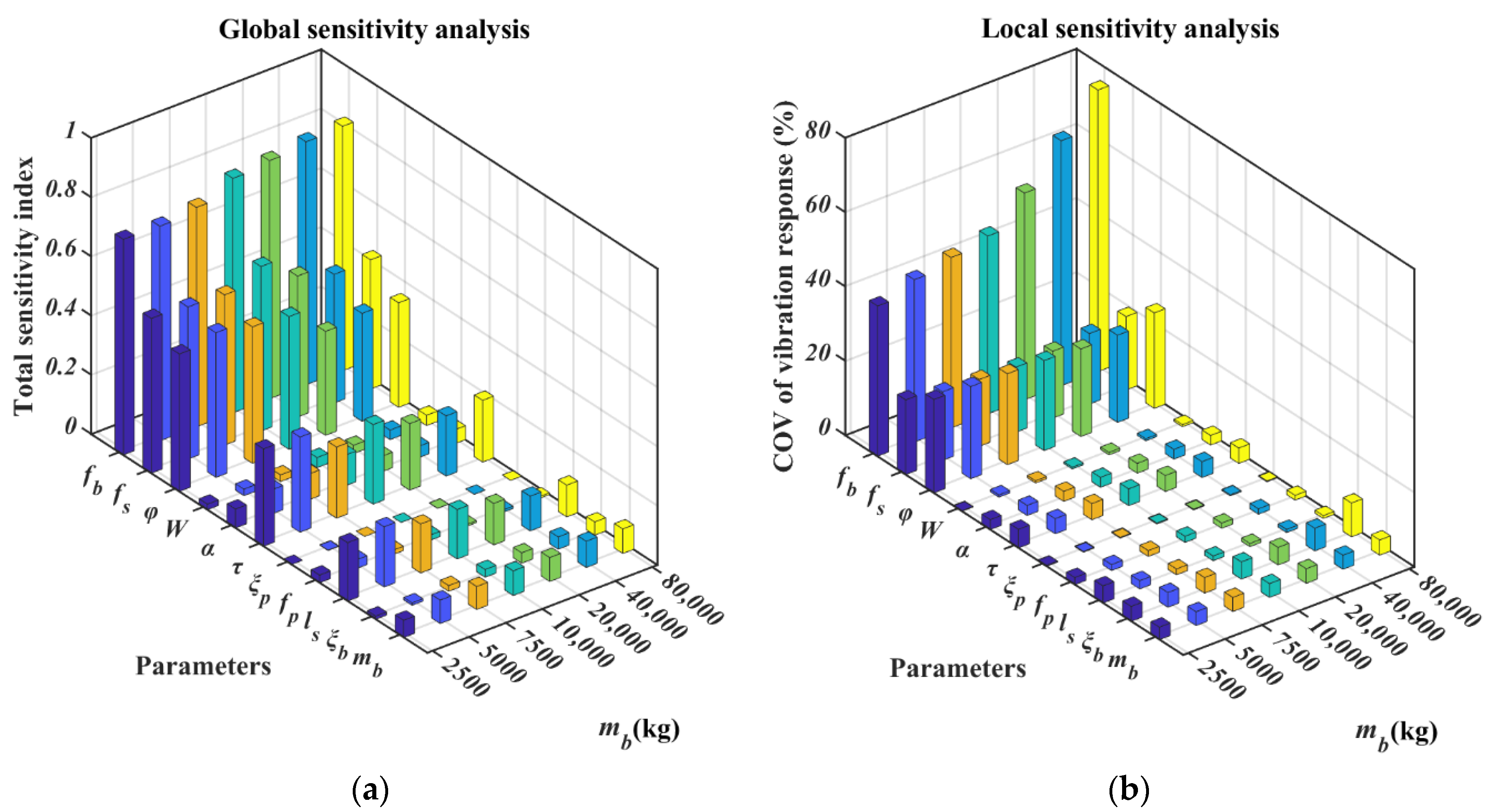
The TSIs from the GSAs for Bridge Series A are presented in Figure 4a, which suggests that:
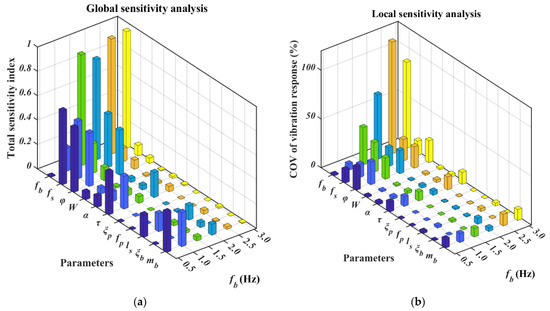
Figure 4.
The results from GSAs and LSAs of the vibration response of Bridge Series A induced by a crowd: (a) the TSIs for system and load parameters; and (b) the COV of vibration response when one of the system and load parameters varies.
- For the bridges with mean natural frequency of 0.5 Hz, the step frequency and phase angle are the first two contributors to the response’s variation, followed by the time lag and then the bridge modal mass. The step length and dynamic load factor are the remaining two sensitive parameters.
- For the bridges with the mean natural frequency of 1 Hz, an additional sensitive parameter is the bridge natural frequency.
- For the bridges with the mean natural frequencies of 1.5 Hz and 2.5 Hz, the most sensitive parameter is the bridge frequency, followed by step frequency and then phase angle. For the bridges with the mean natural frequency at 2 Hz, there are three additional sensitive parameters: time lag, step length, and bridge modal mass. For the bridges with the mean natural frequency of 3 Hz, only the first two parameters are sensitive.
Local Sensitivity Analysis
The results of LSAs for Bridge Series A induced by a crowd are presented in Figure 4b.
- For the bridges with the mean natural frequency of 0.5 Hz, there are six sensitive parameters, i.e., the phase angle, step frequency, time lag, bridge modal mass, dynamic load factor, and step length. Apart from these six parameters, an additional parameter, the bridge natural frequency, becomes sensitive for the bridges with the mean natural frequency of 1 Hz.
- For the bridges with the mean natural frequency of 1.5 Hz and 2.5 Hz, the most sensitive parameter is the bridge natural frequency, followed by step frequency and then phase angle. When the bridges have the mean natural frequency of 3 Hz, the step frequency becomes insensitive.
- For the bridges with the mean natural frequency of 2 Hz, the variation in bridge natural frequency impacts most the vibration response, followed by phase angle and then step frequency. The bridge damping ratio, time lag, and bridge modal mass are the last three sensitive parameters.
By comparing Figure 4a,b, it is found that GSA and LSA generate the same sensitive parameters and their ranking for the bridges with the mean natural frequency of 1.5 Hz and 2.5 Hz, different sensitive parameters when the mean natural frequency is taken to be 2 Hz and 3 Hz, and the same parameters but different ranking when the mean natural frequency no larger than 1 Hz. Again, both the results from GSA and LSA vary with the input space of bridge natural frequency.
Note that a 95th percentile of the peak of one-second RMS acceleration of the 10,000 cases for each analysis in the GSA and LSA in Section 5.1.2 is in the range of 0.04 to 2.64 .
5.2. Modal Mass
Similarly, parametric analysis is carried out to investigate the robustness of results of sensitivity analysis to the variation of the input space of modal mass. According to [53], the physical mass per square meter of deck area for a footbridge ranges from 52 to 1955 . The footbridge with low modal mass is prone to vibration problems. Here, seven footbridges, the mean physical mass density ranging from 50 to 1600 , are analyzed. Their mean modal mass is taken to be 2500 kg, 5000 kg, 7500 kg, 10,000 kg, 20,000 kg, 40,000 kg, and 80,000 kg, respectively. The modal mass of these seven footbridges is described by normal distribution: N (5000–80,000 kg, 10%). The statistical characteristics of the remaining parameters are taken from Table 2. These seven footbridges are designated as Bridge Series B.
5.2.1. Vibration Response Induced by a Single Pedestrian
Global Sensitivity Analysis
Figure 5a shows the TSIs from the GSAs for Bridge Series B, which indicate that the bridge frequency is always the main contributor, with its TSI slightly larger than that of step frequency. The dynamic load factor is the third sensitive parameter with a TSI of about 0.07.
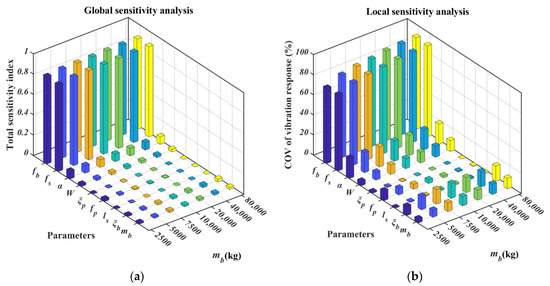
Figure 5.
The results from GSAs and LSAs of the vibration response of Bridge Series B with a single pedestrian crossing: (a) the TSIs for system and load parameters; and (b) the COV of vibration response when one of the system and load parameters varies.
Local Sensitivity Analysis
The results of LSAs are shown in Figure 5b. The influential parameters are the bridge frequency, step frequency, and dynamic load factor, and they are independent from modal mass.
The comparison between Figure 5a,b indicates that LSA and GSA produce consistent results in terms of sensitive parameters and their ranking. In addition, it can be concluded that the variation of the input space of modal mass will not affect the results of GSA and LSA under the excitation of a single pedestrian.
Note that a 95th percentile of the peak of one-second RMS acceleration of the 10,000 cases for each analysis in the GSA and LSA in Section 5.2.1 is in the range of 0.08 to 2.17 .
5.2.2. Vibration Response Induced by a Crowd
Global Sensitivity Analysis
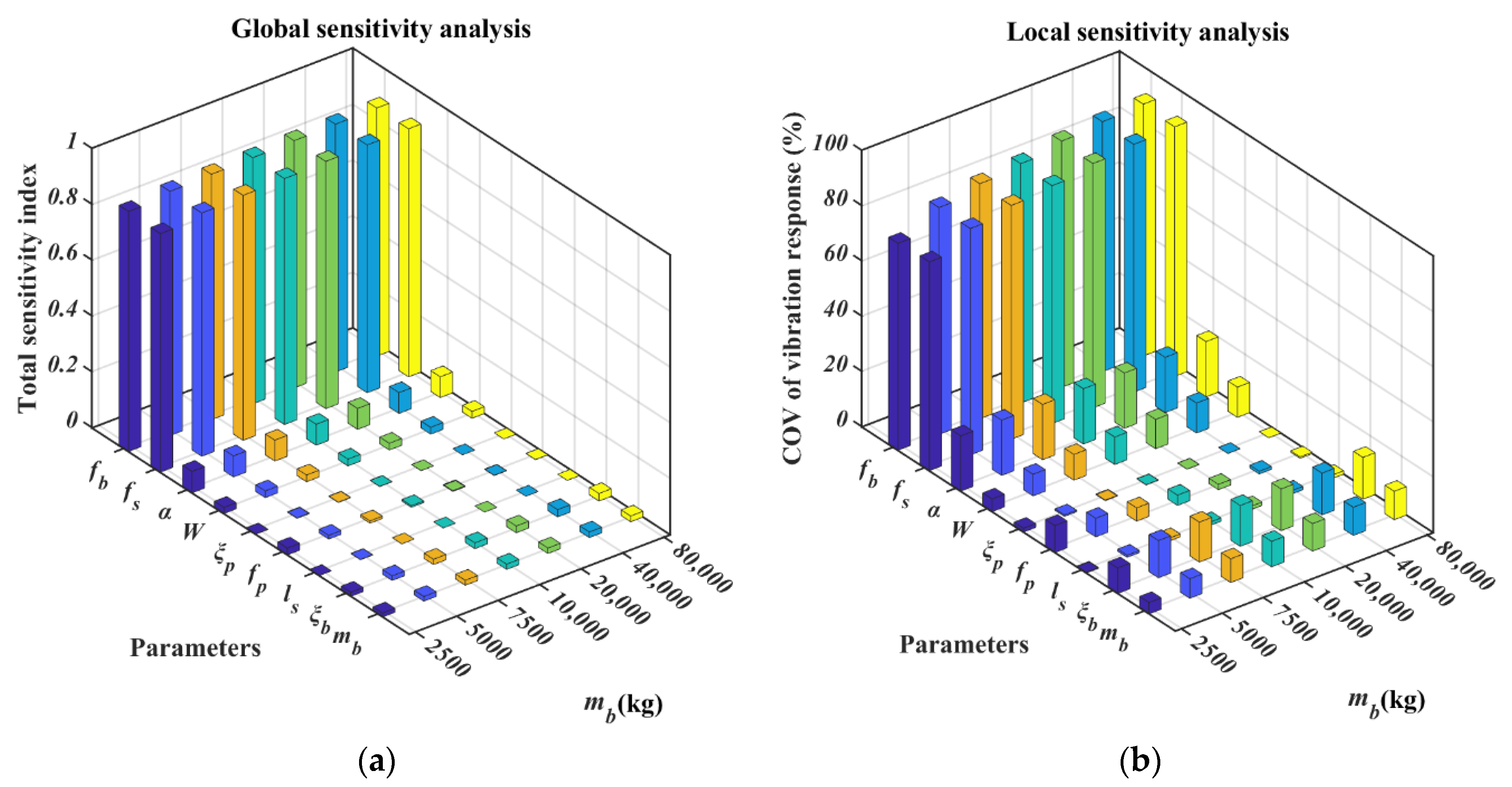
The TSIs from GSAs for Bridge Series B are obtained and presented in Figure 6a. For all seven bridges, there are six influential parameters, i.e., the bridge natural frequency, step frequency, phase angle, time lag, step length, and bridge modal mass. For the bridges with the mean modal mass no larger than 10,000 kg, there is an additional sensitive parameter, the dynamic load factor.
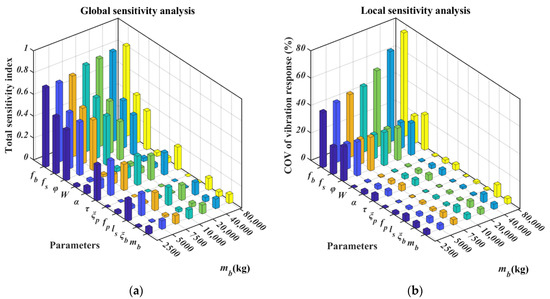
Figure 6.
The results from GSAs and LSAs of the vibration response of Bridge Series B induced by a crowd: (a) the TSIs for system and load parameters; and (b) the COV of vibration response when one of the system and load parameters varies.
Local Sensitivity Analysis
For the scenario of a crowd, the results from LSA are presented in Figure 6b. For the bridges with the mean modal mass no smaller than 20,000 kg, there are six influential parameters, which are the bridge’s natural frequency, phase angle, step frequency, bridge damping ratio, time lag, and bridge modal mass. For the bridges with the mean modal mass of 2500 kg, there is an additional sensitive parameter, the step length, and for the bridges with the mean modal mass ranging from 5000 kg to 10,000 kg, the seventh sensitive parameter is the dynamic load factor.
Compared with the results of GSA, LSA may lead to different influential parameters. Based the analysis above, it can be concluded that the results of GSA and LSA may vary with the input space of modal mass.
Note that a 95th percentile of the peak of one-second RMS acceleration of the 10,000 cases for each analysis in the GSA and LSA in Section 5.2.2 is in the range of 0.35 to 8.4 .
5.3. Damping Ratio
This section examines the influence of the variation of the input space of the damping ratio on the results of sensitivity analysis. The footbridge with a low damping ratio, usually no more than 2%, is prone to vibration problems. Here, nine footbridges are analyzed. Their mean damping ratios are taken to be 0.2%, 0.3%, 0.4%, 0.5%, 0.75%, 1%, 1.25%, 1.5%, and 2%, respectively. The damping ratio of these nine footbridges is described by normal distribution: N (0.2–2%, 20%). The statistical characteristics of the remaining parameters are taken from Table 2. These nine footbridges are denoted as Bridge Series C.
5.3.1. Vibration Response Induced by a Single Pedestrian
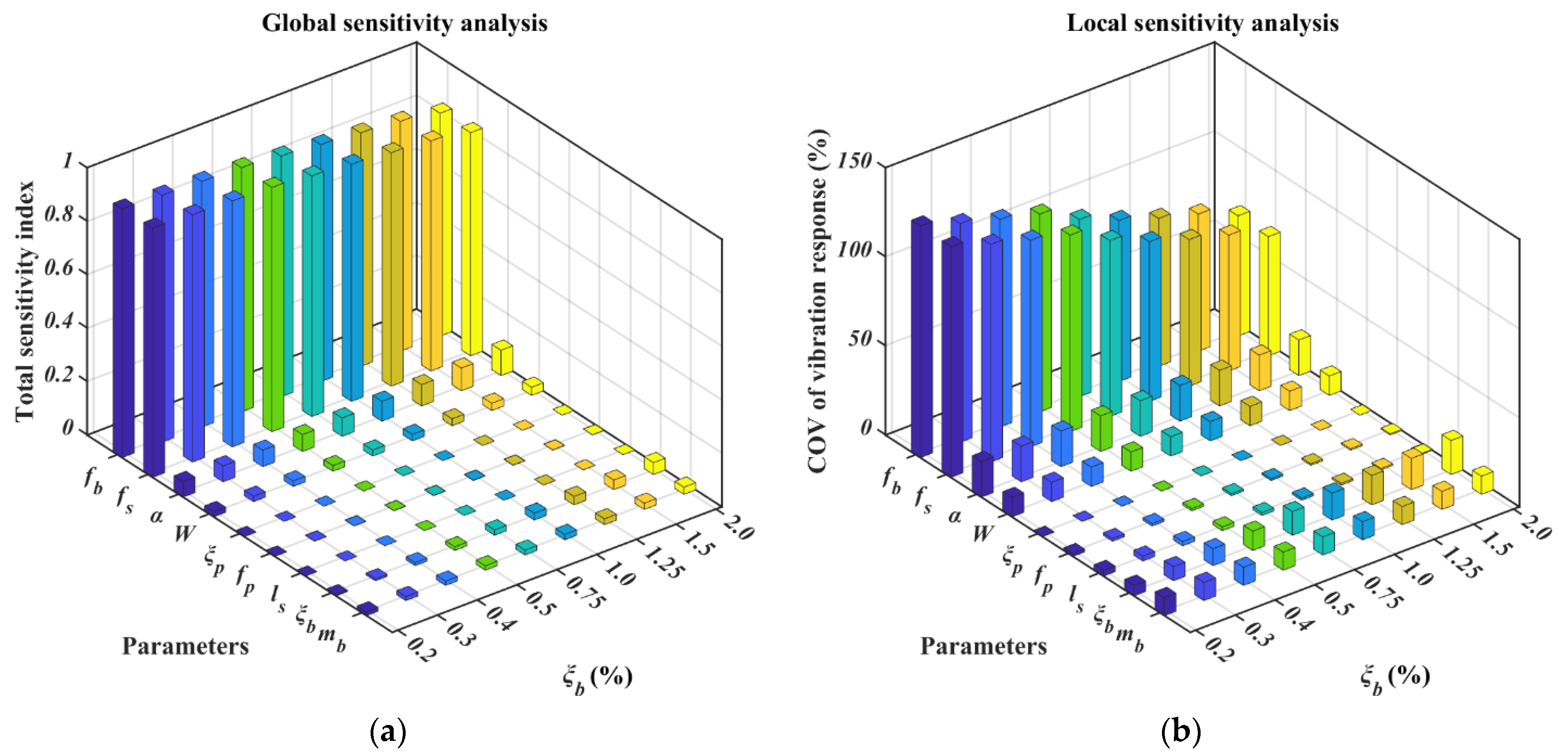
Global Sensitivity Analysis
The generated TSIs for Bridge Series C are displayed in Figure 7a. For all nine bridges, there are two sensitive parameters, among which the step frequency is the most important with the TSI slightly larger than that of the bridge’s natural frequency. The dynamic load factor becomes the third sensitive parameter for the bridges with the mean damping ratio no smaller than 1%.
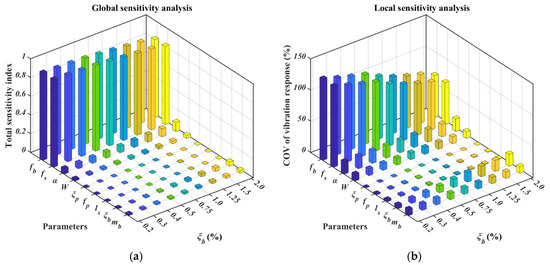
Figure 7.
The results from GSAs and LSAs of the vibration response of Bridge Series C with a single pedestrian crossing: (a) the TSIs for system and load parameters; and (b) the COV of vibration response when one of the system and load parameters varies.
Local Sensitivity Analysis
The LSAs for Bridge Series C in the single pedestrian scenario are presented in Figure 7b. For all nine bridges, the vibration responses are most sensitive to bridge natural frequency and step frequency. For the bridges with the mean damping ratio no smaller than 1%, there is an additional sensitive parameter, the dynamic load factor.
The comparison between the results in Figure 7a,b indicates that GSA and LSA produce the same sensitive parameters but different rankings for all nine bridges. It can be found that the results from GSA and LSA may change with the input space of the damping ratio.
Note that a 95th percentile of the peak of one-second RMS acceleration of the 10,000 cases for each analysis in the GSA and LSA in Section 5.3.1 is in the range of 0.1 to 0.5 .
5.3.2. Vibration Response Induced by a Crowd
Global Sensitivity Analysis
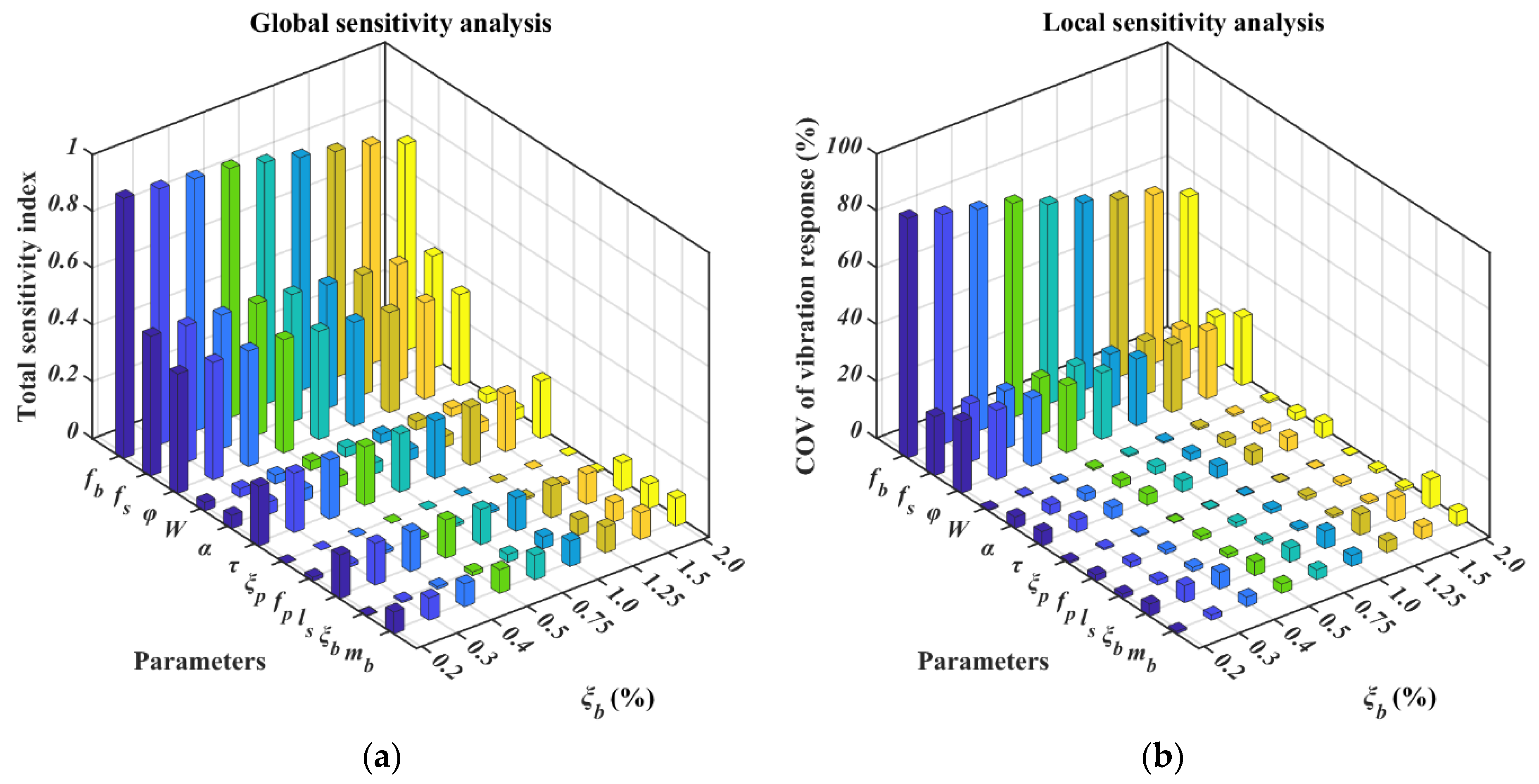
The TSIs from GSAs for Bridge Series C are shown in Figure 8a. For all nine bridges, the sensitive parameters are the bridge natural frequency, step frequency, phase angle, time lag, step length, and bridge modal mass. For the bridges with the mean damping ratio of 2%, there is an additional sensitive parameter, the bridge damping ratio.
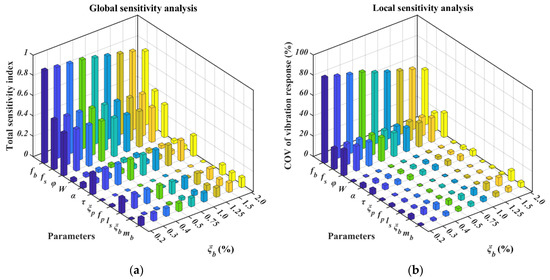
Figure 8.
The results from GSAs and LSAs of the vibration response of Bridge Series C induced by a crowd: (a) the TSIs for system and load parameters; and (b) the COV of vibration response when one of the system and load parameters varies.
Local Sensitivity Analysis
The results of LSAs for Bridge Series C caused by the excitation of a crowd are shown in Figure 8b, which shows:
- When the bridges have the mean damping ratio no bigger than 0.3%, there are six sensitive parameters, i.e., the bridge natural frequency, phase angle, step frequency, bridge damping ratio, time lag, and dynamic load factor.
- For the bridges with the mean damping ratio ranging from 0.4% to 1.5%, the first five sensitive parameters are the same as those for the bridges with the mean value of damping ratio no bigger than 0.3%, as well as the ranking, but the sixth sensitive parameter is replaced by the bridge modal mass. Apart from these six parameters, an additional parameter, the dynamic load factor, becomes sensitive for the bridges with the mean damping ratio of 2%.
In summary, the results of GSA and LSA sensitive to the input space of damping ratio. Compared with GSA, LSA produces the different sensitive parameters for each damping ratio case.
Note that a 95th percentile of the peak of one-second RMS acceleration of the 10,000 cases for each analysis in the GSA and LSA in Section 5.3.2 is in the range of 0.47 to 4.31 .
6. Discussion
The results of GSA and LSA for the vibration responses of the representative bridge, Bridge Series A, Bridge Series B, and Bridge Series C to the two load cases are summarized in Table 3. In the table, denotes the local sensitivity index of parameter and denotes the TSI obtained from the Sobol’ method. It can be concluded that:
Table 3.
The results from GSA and LSA of vibration responses of bridges.
- In the case of a single pedestrian crossing, both GSA and LSA select the same sensitive parameters and produce the same ranking for the representative bridge, Bridge Series A and Bridge Series B. However, for the bridges in Bridge Series C, the same sensitive parameters are selected but ordered differently.
- In the case of the excitation of a crowd, both GSA and LSA select the same influential parameters and their ranking for the bridges in Bridge Series A with the mean natural frequency of 1.5 Hz and 2.5 Hz. The same sensitive parameters but ordered differently are generated for bridges in Bridge Series A with the mean natural frequency no larger than 1 Hz. However, for the representative bridge, bridges in Bridge Series A with the mean natural frequency of 2 Hz and 3 Hz, Bridge Series B and Bridge Series C, GSA and LSA generate different sensitive parameters.
- The results of GSA and LSA for all kinds of bridges in the two load cases are generally sensitive to the variation of input space of modal mass, natural frequency, and damping ratio of the bridge. The exception is the results of GSA and LSA for Bridge Series B under the excitation of a single pedestrian.
- In addition, when the pedestrian step frequency is close to the bridge frequency, the TSIs of important parameters in all cases are found to be much greater than their first-order counterparts, which indicates strong interaction between important parameters. This agrees with the fact that large human-induced vibration response only occurs when these two frequencies are close to each other. It is strong interaction between these two frequencies that leads to significant discrepancies between the TSIs and FSIs.
- The damping ratio and natural frequency of a human body are found to be the only two insensitive parameters in all the cases. Additional numerical results, which are not presented in the paper, show that the human body’s frequency may become sensitive only in the case where a single pedestrian crosses a bridge with a mean modal mass no larger than 350 kg. However, there are rarely real footbridges with modal masses lower than 350 kg. Therefore, there is no need to quantify the uncertainty in these two parameters in practice.
- Sensitive parameters from both the GSA and LSA may vary with the load case. For example, for a footbridge in Bridge Series A with the mean natural frequency of 1.5 Hz, the step frequency is the most influential parameter in the case of a single pedestrian crossing, while the bridge’s natural frequency becomes the most influential parameter in the case of a crowd crossing. This is explained by the fact that the model outputs for sensitivity analysis are different between the situations of a single pedestrian and a crowd.
The analysis presented in this paper indicates why there is inconsistency in the results of sensitivity analysis for the pedestrian-induced vibrations of footbridges in existing literature. These reasons are given as follows.
- The results of sensitivity analysis may vary with the input space of parameters. In other words, for different footbridges and different load cases, different sensitive parameters may be produced by GSA or LSA. Therefore, the analysis in the paper is limited to the parameter space covered in the paper.
- The inclusion of partial uncertain parameters in sensitivity analysis may lead to a misleading conclusion. Take the representative footbridge considered in Section 4 for example: additional analysis shows that the vibration response to the two load cases is most sensitive to step frequency if uncertainties in the step frequency, step length, and pedestrian weight are considered only. However, the bridge’s natural frequency becomes most influential if all uncertain parameters are considered, as shown in Section 4.
- The results of LSA may be inconsistent with those of GSA. This is attributed to the fact that LSA evaluates the sensitivity in the vicinity of a particular point and provides only a limited view of model sensitivity, which may exclude the effects of interactions between uncertain parameters in the unexplored input space and lead to misleading results. However, GSA provides more reliable results by characterizing the sensitivity across all input spaces. Therefore, GSA is suggested for the sensitive analysis of pedestrian-induced vibration of footbridges.
7. Conclusions
This paper investigates the impact of uncertainty in system and load parameters on vibration responses induced by walking pedestrian(s) using the approaches of LSA and Sobol’-based GSA. First, the LSA and GSA are conducted for the vibration responses of a representative bridge under two load cases, i.e., a single pedestrian and a crowd. Parametric analysis is then carried out to study the sensitivity of the results of LSA and GSA to the input spaces of the modal mass, natural frequency, and damping ratio of a footbridge. It is concluded that in the two load cases, GSA and LSA may produce consistent results in terms of sensitive parameters and their ranking, different sensitive parameters, or the same sensitive parameters but ordered differently, depending upon the bridge’s modal properties. The results of GSA and LSA for all kinds of bridges in the two load cases are generally sensitive to the variation of input space of modal mass, natural frequency, and damping ratio of the bridge. The exception is the result for Bridge Series B under the excitation of a single pedestrian. The damping ratio and natural frequency of human body are found to be the only two insensitive parameters. Hence, there is no need to quantify experimentally or numerically the uncertainty in these two parameters in vibration response analysis for footbridges. Compared with the LSA, GSA provides more reliable results by characterizing the sensitivity across entire input spaces; therefore, GSA is suggested for the sensitive analysis of the pedestrian-induced vibration of footbridges. This study provides a comprehensive and conclusive insight into the sensitivity of a pedestrian-induced vibration response and explains why there are inconsistent results in existing literature. It is beneficial for selecting sensitive parameters required for analyzing uncertainty propagation in stochastic response assessment, as well as for the experimental characterization of randomness.
Author Contributions
Conceptualization, X.W.; methodology, X.W.; software, J.Z.; validation, X.W. and J.Z.; investigation, J.Z.; writing—original draft preparation, J.Z.; writing—review and editing, X.W., H.Z. and S.Ž.; funding acquisition, X.W. All authors have read and agreed to the published version of the manuscript.
Funding
The authors acknowledge the support of the National Natural Science Foundation of China (grant number 52178181) and the Fundamental Research Funds for the Central Universities, China (grant number 2020CX035).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article. Additional supporting data presented in this study are available upon request from the corresponding authors.
Conflicts of Interest
The authors declare no conflict of interest.
References
- García-Diéguez, M.; Zapico-Valle, J. Sensitivity of the vertical response of footbridges to the frequency variability of crossing pedestrians. Vibration 2018, 1, 290–311. [Google Scholar] [CrossRef] [Green Version]
- Hawryszków, P.; Biliszczuk, J. Vibration serviceability of footbridges made of the sustainable and eco structural material: Glued-laminated wood. Materials 2022, 15, 1529. [Google Scholar] [CrossRef] [PubMed]
- Lievens, K.; Lombaert, G.; Van Nimmen, K.; De Roeck, G.; Van den Broeck, P. Robust vibration serviceability assessment of footbridges subjected to pedestrian excitation: Strategy and applications. Eng. Struct. 2018, 171, 236–246. [Google Scholar] [CrossRef]
- Caprani, C.C.; Ahmadi, E. Formulation of human–structure interaction system models for vertical vibration. J. Sound Vib. 2016, 377, 346–367. [Google Scholar] [CrossRef]
- Tubino, F.; Pagnini, L.; Piccardo, G. Uncertainty propagation in the serviceability assessment of footbridges. Struct. Infrastruct. Eng. 2020, 16, 123–137. [Google Scholar] [CrossRef]
- Sétra. Technical Guide Footbridges: Assessment of Vibrational Behaviour of Footbridges under Pedestrian Loading; Association Franaise de Génie Civil (AFGC): Paris, France, 2006. [Google Scholar]
- BSI. UK National Annex to Eurocode 1: Actions on Structures—Part 2: Traffic Loads on Bridges; NA to BS EN 1991-2: 2003; British Standards Institution: London, UK, 2008. [Google Scholar]
- Pedersen, L.; Frier, C. Sensitivity of footbridge vibrations to stochastic walking parameters. J. Sound Vib. 2010, 329, 2683–2701. [Google Scholar] [CrossRef]
- Živanović, S.; Pavić, A.; Reynolds, P. Probability-based prediction of multi-mode vibration response to walking excitation. Eng. Struct. 2007, 29, 942–954. [Google Scholar] [CrossRef]
- Demartino, C.; Avossa, A.M.; Ricciardelli, F. Deterministic and probabilistic serviceability assessment of footbridge vibrations due to a single walker crossing. Shock Vib. 2018, 2018, 1917629. [Google Scholar] [CrossRef] [Green Version]
- Wei, X.; Liu, J.-C.; Bi, S. Uncertainty quantification and propagation of crowd behaviour effects on pedestrian-induced vibrations of footbridges. Mech. Syst. Signal Process. 2022, 167, 108557. [Google Scholar] [CrossRef]
- Avossa, A.M.; Demartino, C.; Ricciardelli, F. Probability distribution of footbridge peak acceleration to single and multiple crossing walkers. Procedia Eng. 2017, 199, 2766–2771. [Google Scholar] [CrossRef]
- Kerr, S.; Bishop, N. Human induced loading on flexible staircases. Eng. Struct. 2001, 23, 37–45. [Google Scholar] [CrossRef]
- Sahnaci, C.; Kasperski, M. Random loads induced by walking. In Proceedings of the Sixth European Conference on Structural Dynamics, Paris, France, 4–7 September 2005. [Google Scholar]
- Kasperski, M.; Sahnaci, C. Serviceability of pedestrian structures. In Proceedings of the 25th Conference and Exposition on Structural Dynamics, Orlando, FL, USA, 19–22 February 2007. [Google Scholar]
- Kramer, H.; Kebe, H. Man-induced structural vibrations. Der Bauing. 1980, 54, 195–199. [Google Scholar]
- Ricciardelli, F.; Briatico, C.; Ingólfsson, E.T.; Georgakis, C. Experimental validation and calibration of pedestrian loading models for footbridges. In Proceedings of the Experimental Vibration Analysis for Civil Engineering Structures, Porto, Portugal, 24–26 October 2007. [Google Scholar]
- Živanović, S.; Pavić, A.; Ingólfsson, E.T. Modeling spatially unrestricted pedestrian traffic on footbridges. J. Struct. 2010, 136, 1296–1308. [Google Scholar] [CrossRef] [Green Version]
- Sahnaci, C.; Kasperski, M. Simulation of random pedestrian flow. In Proceedings of the 8th International Conference on Structural Dynamics, Leuven, Belgium, 4–6 July 2011. [Google Scholar]
- Ji, T.; Pachi, A. Frequency and velocity of people walking. Struct. Eng. 2005, 84, 36–40. [Google Scholar]
- Niu, S.; Wang, C.; Gao, S. A novel crowd random loads model for pedestrians walking on footbridge. Arch. Appl. Mech. 2016, 86, 1369–1381. [Google Scholar] [CrossRef]
- Sekiya, N.; Nagasaki, H.; Ito, H.; Furuna, T. Optimal walking in terms of variability in step length. J. Orthop. Sports Phys. Ther. 1997, 26, 266–272. [Google Scholar] [CrossRef]
- Barela, A.M.; Duarte, M. Biomechanical characteristics of elderly individuals walking on land and in water. J. Electromyogr. Kinesiol. 2008, 18, 446–454. [Google Scholar] [CrossRef]
- Živanović, S. Benchmark footbridge for vibration serviceability assessment under the vertical component of pedestrian load. J. Struct. 2012, 138, 1193–1202. [Google Scholar] [CrossRef] [Green Version]
- Matsumoto, Y. Dynamic Design of Footbridges; IABSE: Zurich, Switzerland, 1978. [Google Scholar]
- Ellis, B. On the response of long-span floors to walking loads generated by individuals and crowds. Struct. Eng. 2000, 78, 17–25. [Google Scholar]
- Ahmadi, E.; Caprani, C.; Živanović, S.; Heidarpour, A. Assessment of human-structure interaction on a lively lightweight GFRP footbridge. Eng. Struct. 2019, 199, 109687. [Google Scholar] [CrossRef]
- Hawryszków, P.; Pimentel, R.; Silva, R.; Silva, F. Vertical vibrations of footbridges due to group loading: Effect of pedestrian–structure interaction. Appl. Sci. 2021, 11, 1355. [Google Scholar] [CrossRef]
- Shahabpoor, E.; Pavić, A.; Racić, V. Structural vibration serviceability: New design framework featuring human-structure interaction. Eng. Struct. 2017, 136, 295–311. [Google Scholar] [CrossRef]
- Tubino, F. Probabilistic assessment of the dynamic interaction between multiple pedestrians and vertical vibrations of footbridges. J. Sound Vib. 2018, 417, 80–96. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Lombaert, G.; De Roeck, G.; Van den Broeck, P. The impact of vertical human-structure interaction on the response of footbridges to pedestrian excitation. J. Sound Vib. 2017, 402, 104–121. [Google Scholar] [CrossRef] [Green Version]
- Gallegos-Calderón, C.; Naranjo-Pérez, J.; Díaz, I.M.; Goicolea, J.M. Identification of a human-structure interaction model on an ultra-lightweight FRP footbridge. Appl. Sci. 2021, 11, 6654. [Google Scholar] [CrossRef]
- Lou, J.; Zhang, M.; Chen, J. Identification of stiffness, damping and biological force of SMD model for human walking. In Dynamics of Civil Structures; Springer: Berlin/Heidelberg, Germany, 2015; Volume 2, pp. 331–337. [Google Scholar]
- Wang, H.; Chen, J.; Brownjohn, J.M. Parameter identification of pedestrian’s spring-mass-damper model by ground reaction force records through a particle filter approach. J. Sound Vib. 2017, 411, 409–421. [Google Scholar] [CrossRef]
- Shahabpoor, E.; Pavic, A.; Racic, V. Identification of mass–spring–damper model of walking humans. Structures 2016, 5, 233–246. [Google Scholar] [CrossRef] [Green Version]
- Bertos, G.A.; Childress, D.S.; Gard, S.A. The vertical mechanical impedance of the locomotor system during human walking with applications in rehabilitation. In Proceedings of the 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005. [Google Scholar]
- Shahabpoor, E.; Pavić, A.; Racić, V. Identification of walking human model using agent-based modelling. Mech. Syst. Signal Process. 2018, 103, 352–367. [Google Scholar] [CrossRef]
- Jiménez-Alonso, J.; Sáez, A. A direct pedestrian-structure interaction model to characterize the human induced vibrations on slender footbridges. Inf. Constr. 2014, 66, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Lin, B.; Zhang, Q.; Fan, F.; Shen, S. A damped bipedal inverted pendulum for human–structure interaction analysis. Appl. Math. Model. 2020, 87, 606–624. [Google Scholar] [CrossRef]
- Yang, H.; Wu, B.; Li, J.; Bao, Y.; Xu, G. A spring-loaded inverted pendulum model for analysis of human-structure interaction on vibrating surfaces. J. Sound Vib. 2022, 522, 116727. [Google Scholar] [CrossRef]
- Liang, H.; Zhang, Z.; Wei, P. Theoretical derivation and parameters analysis of a human-structure interaction system with the bipedal walking model. J. Math. 2021, 2021, 6683083. [Google Scholar] [CrossRef]
- Gao, Y.-A.; Yang, Q.-S.; Dong, Y. A three-dimensional pedestrian–structure interaction model for general applications. Int. J. Struct. Stab. Dyn. 2018, 18, 1850107. [Google Scholar] [CrossRef]
- Alampalli, S. Effects of testing, analysis, damage, and environment on modal parameters. Mech. Syst. Signal Process. 2000, 14, 63–74. [Google Scholar] [CrossRef]
- Wei, X.; Wan, H.-P.; Russell, J.; Živanović, S.; He, X. Influence of mechanical uncertainties on dynamic responses of a full-scale all-FRP footbridge. Compos. Struct. 2019, 223, 110964. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Lombaert, G.; De Roeck, G.; Van den Broeck, P. Vibration serviceability of footbridges: Evaluation of the current codes of practice. Eng. Struct. 2014, 59, 448–461. [Google Scholar] [CrossRef]
- Feldmann, M.; Heinemeyer, C.; Lukic, M.; Caetano, E.; Cunha, Á.; Goldack, A.; Keil, A.; Schlaich, M.; Hicks, S.; Smith, A.; et al. Human-Induced Vibration of Steel Structures; HIVOSS Project; European Commission: Brussels, Belgium, 2008. [Google Scholar]
- Caprani, C.C.; Keogh, J.; Archbold, P.; Fanning, P. Enhancement factors for the vertical response of footbridges subjected to stochastic crowd loading. Comput. Struct. 2012, 102–103, 87–96. [Google Scholar] [CrossRef] [Green Version]
- Haaker, M.; Verheijen, P.J. Local and global sensitivity analysis for a reactor design with parameter uncertainty. Chem. Eng. Res. Des. 2004, 82, 591–598. [Google Scholar] [CrossRef]
- Razavi, S.; Gupta, H.V. What do we mean by sensitivity analysis? The need for comprehensive characterization of “global” sensitivity in earth and environmental systems models. Water Resour. 2015, 51, 3070–3092. [Google Scholar] [CrossRef]
- Sobol, I.M. Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates. Math. Comput. Simul. 2001, 55, 271–280. [Google Scholar] [CrossRef]
- Archer, G.; Saltelli, A.; Sobol, I. Sensitivity measures, ANOVA-like techniques and the use of bootstrap. J. Stat. Comput. Simul. 1997, 58, 99–120. [Google Scholar] [CrossRef]
- Piccardo, G.; Tubino, F. Equivalent spectral model and maximum dynamic response for the serviceability analysis of footbridges. Eng. Struct. 2012, 40, 445–456. [Google Scholar] [CrossRef]
- Wei, X.; Russell, J.; Živanović, S.; Mottram, J.T. Measured dynamic properties for FRP footbridges and their critical comparison against structures made of conventional construction materials. Compos. Struct. 2019, 223, 110956. [Google Scholar] [CrossRef]
- Schlaich, M. Guidelines for the Design of Footbridges, Guide to Good Practice-Bulletin 32. In Proceedings of the Footbridge 2005 (Second International Congress), Venice, Italy, 6–8 December 2005. [Google Scholar]
- Subbaraj, K.; Dokainish, M. A survey of direct time-integration methods in computational structural dynamics—II. Implicit methods. Comput. Struct. 1989, 32, 1387–1401. [Google Scholar] [CrossRef]
- Tang, Y.; Reed, P.; Van Werkhoven, K.; Wagener, T. Advancing the identification and evaluation of distributed rainfall-runoff models using global sensitivity analysis. Water Resour. 2007, 43, W06415. [Google Scholar] [CrossRef]
- Coppitters, D.; De Paepe, W.; Contino, F. Surrogate-assisted robust design optimization and global sensitivity analysis of a directly coupled photovoltaic-electrolyzer system under techno-economic uncertainty. Appl. Energy 2019, 248, 310–320. [Google Scholar] [CrossRef]
- Hsieh, N.-H.; Reisfeld, B.; Bois, F.Y.; Chiu, W.A. Applying a global sensitivity analysis workflow to improve the computational efficiencies in physiologically-based pharmacokinetic modeling. Front. Pharmacol. 2018, 9, 588. [Google Scholar] [CrossRef]
- Zhang, X.-Y.; Trame, M.; Lesko, L.; Schmidt, S. Sobol sensitivity analysis: A tool to guide the development and evaluation of systems pharmacology models. CPT Pharmacomet. Syst. Pharmacol. 2015, 4, 69–79. [Google Scholar] [CrossRef]
- Chan, K.; Saltelli, A.; Tarantola, S. Sensitivity analysis of model output: Variance-based methods make the difference. In Proceedings of the 29th Conference on Winter Simulation, Atlanta, GA, USA, 7–10 December 1997. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).