

Distributed Time Delay Models: An Alternative to Fractional Calculus-Based Models for Fractional Behavior Modeling


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Fractional Calculus and Fractional Models: A Reminder
3. Distributed Time Delay Models for Fractional Behaviors: Discrete Time Case
4. Distributed Time Delay Models for Fractional Behaviors: Continuous Time Case
4.1. A Preliminary Analysis
- -
- for , ;
- -
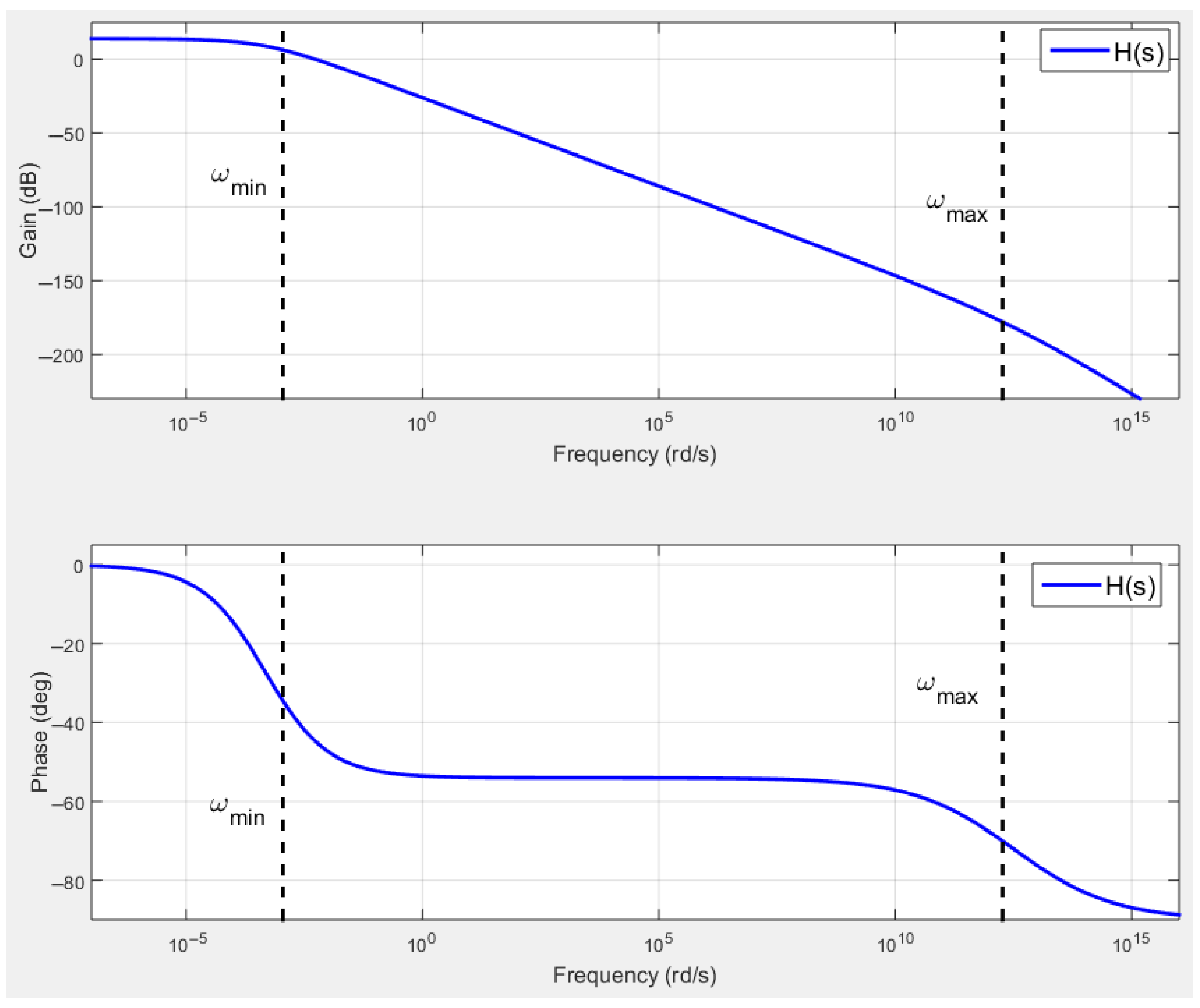
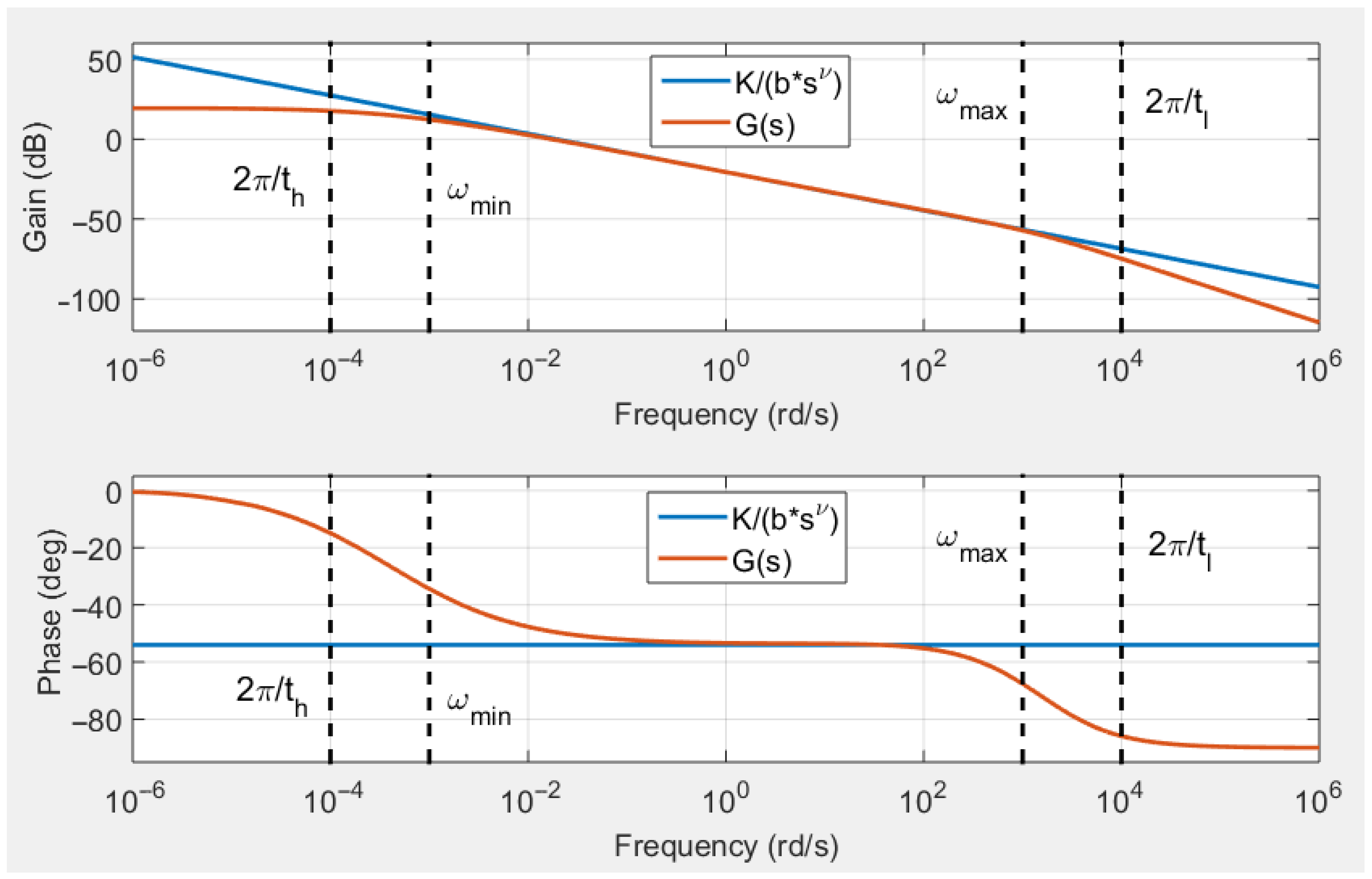
- for frequencies such as and , thenfor .
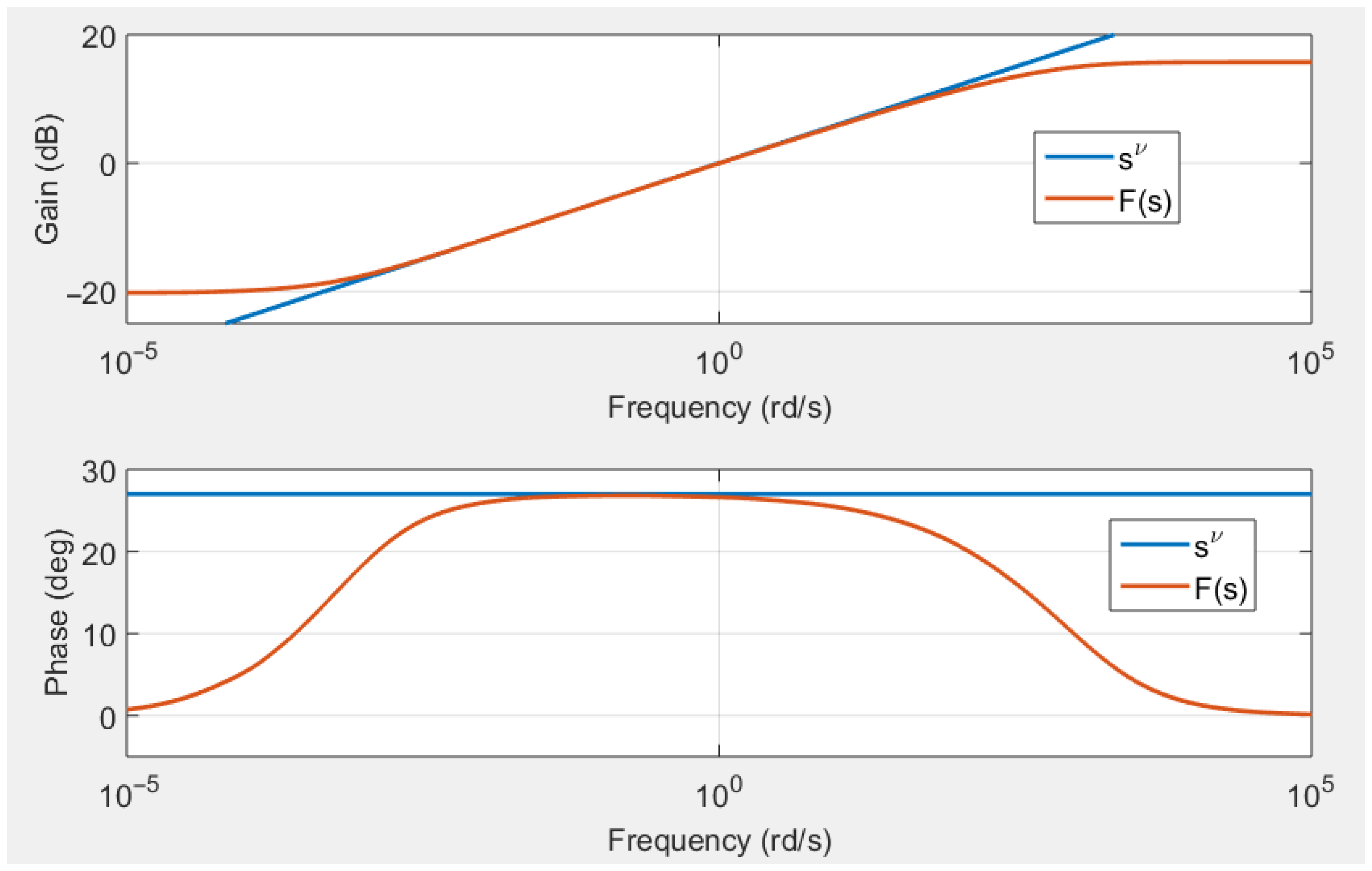
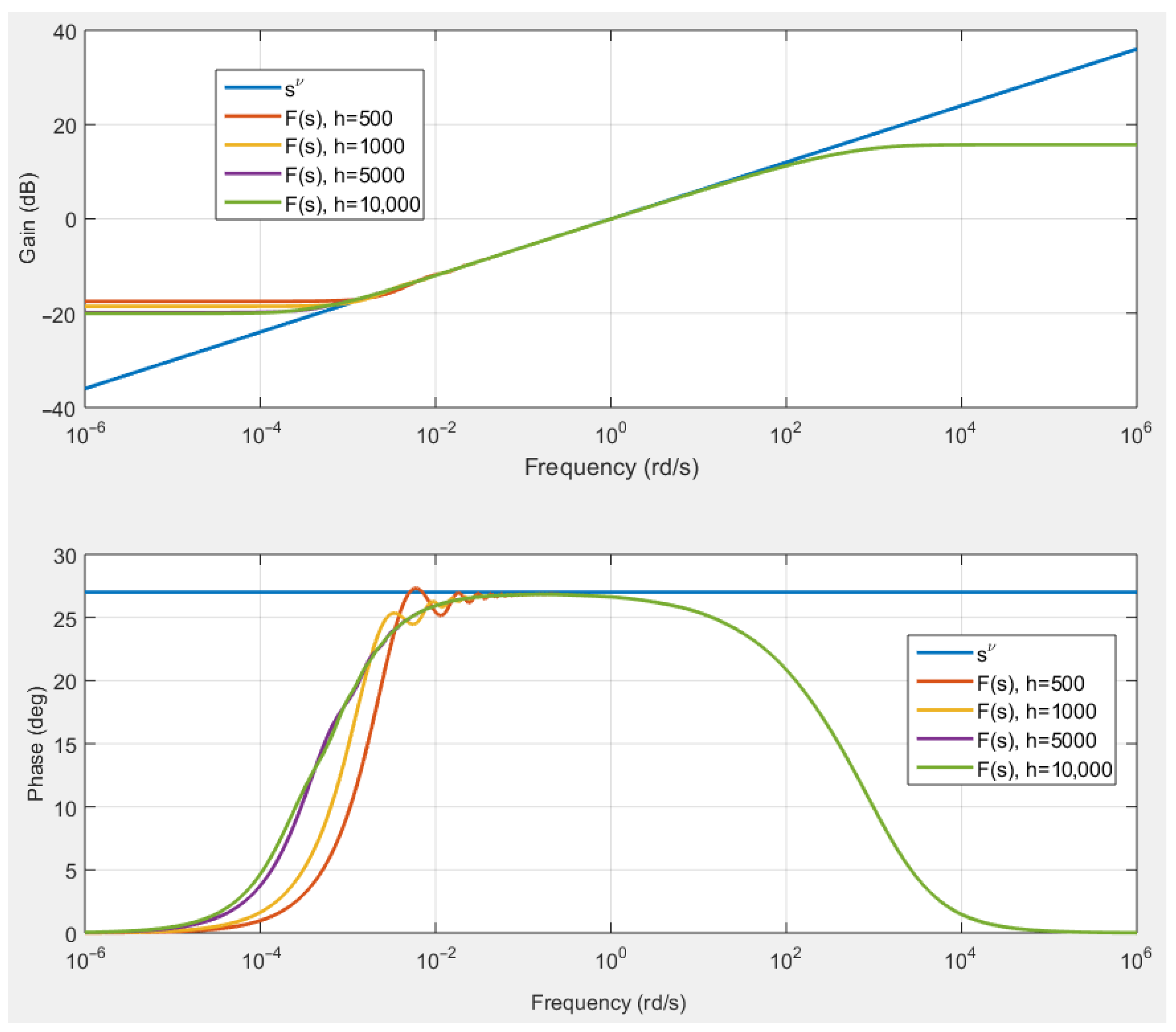
4.2. Order ν Fractional Derivative-like Behavior
| Algorithm 1 Functions synthesis [38] | |
| |
| . | (38) |
| |
4.3. Distributed Time Delay Models with Fractional Behaviors
5. Physical Interpretations and Numerical Example
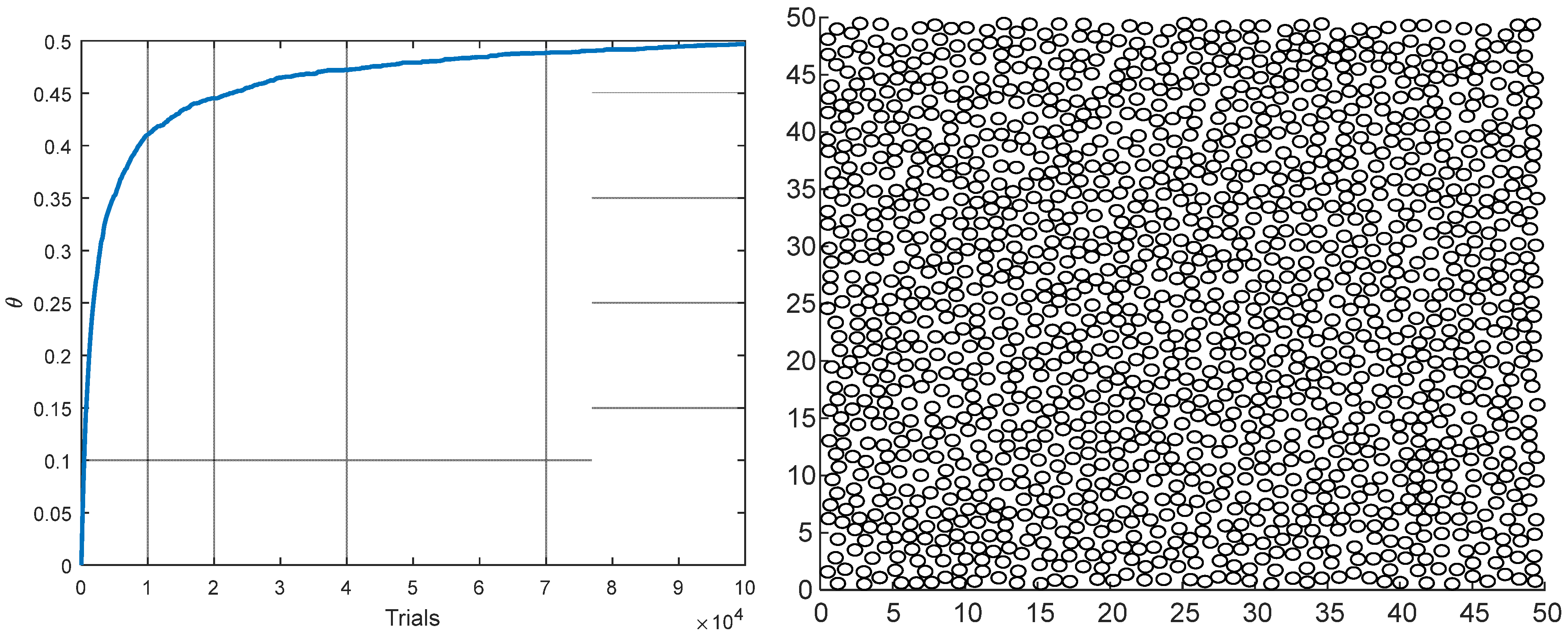
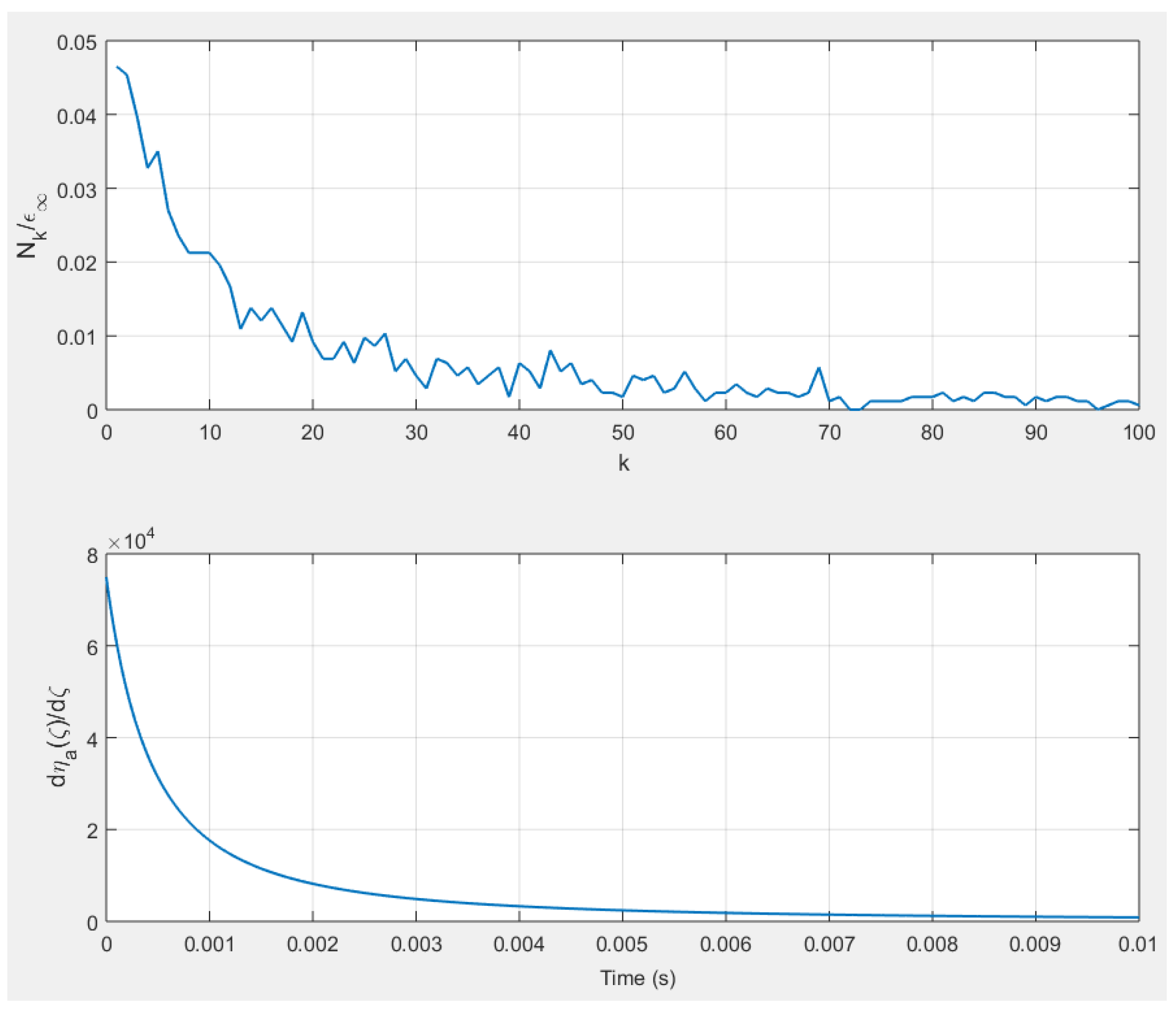
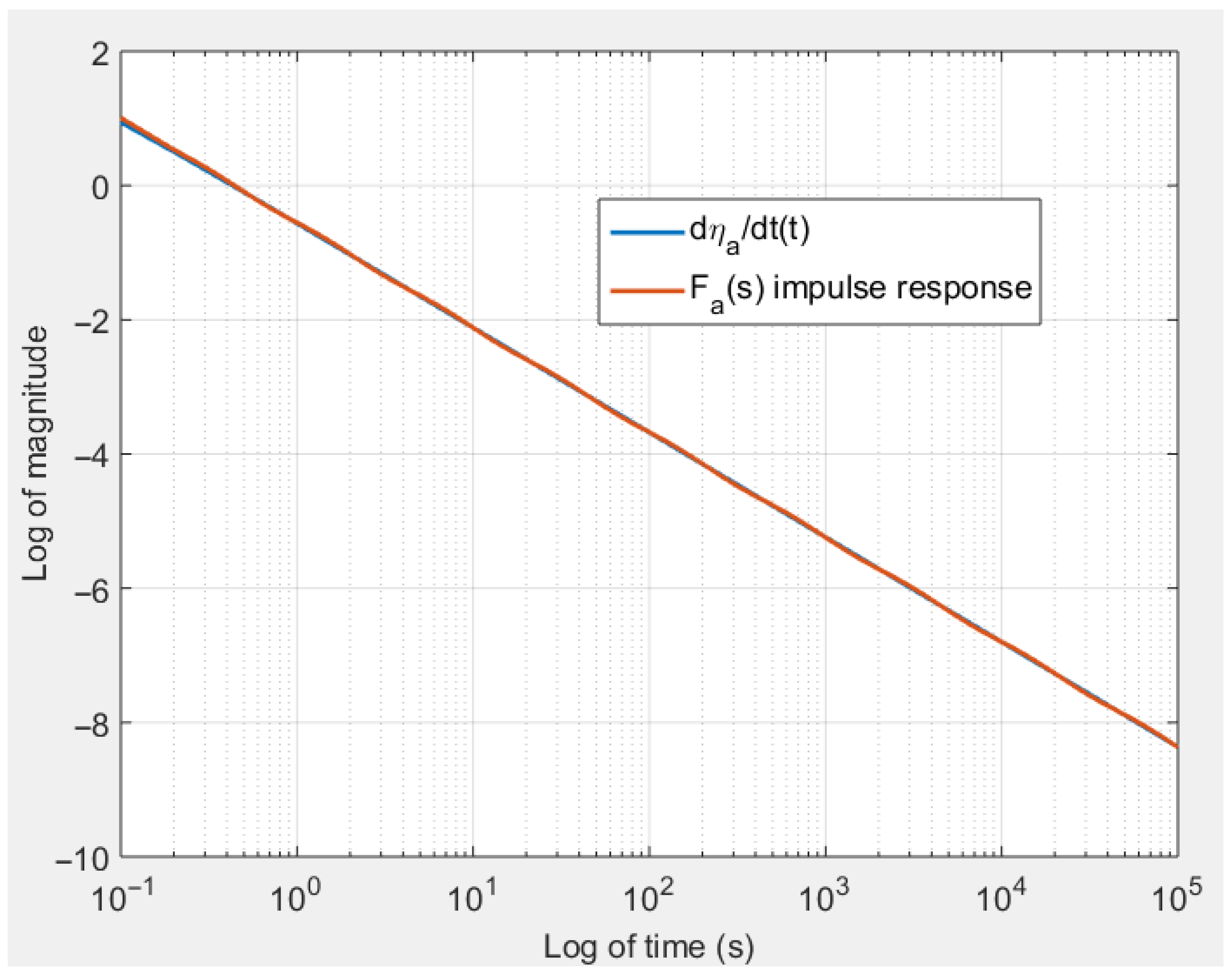
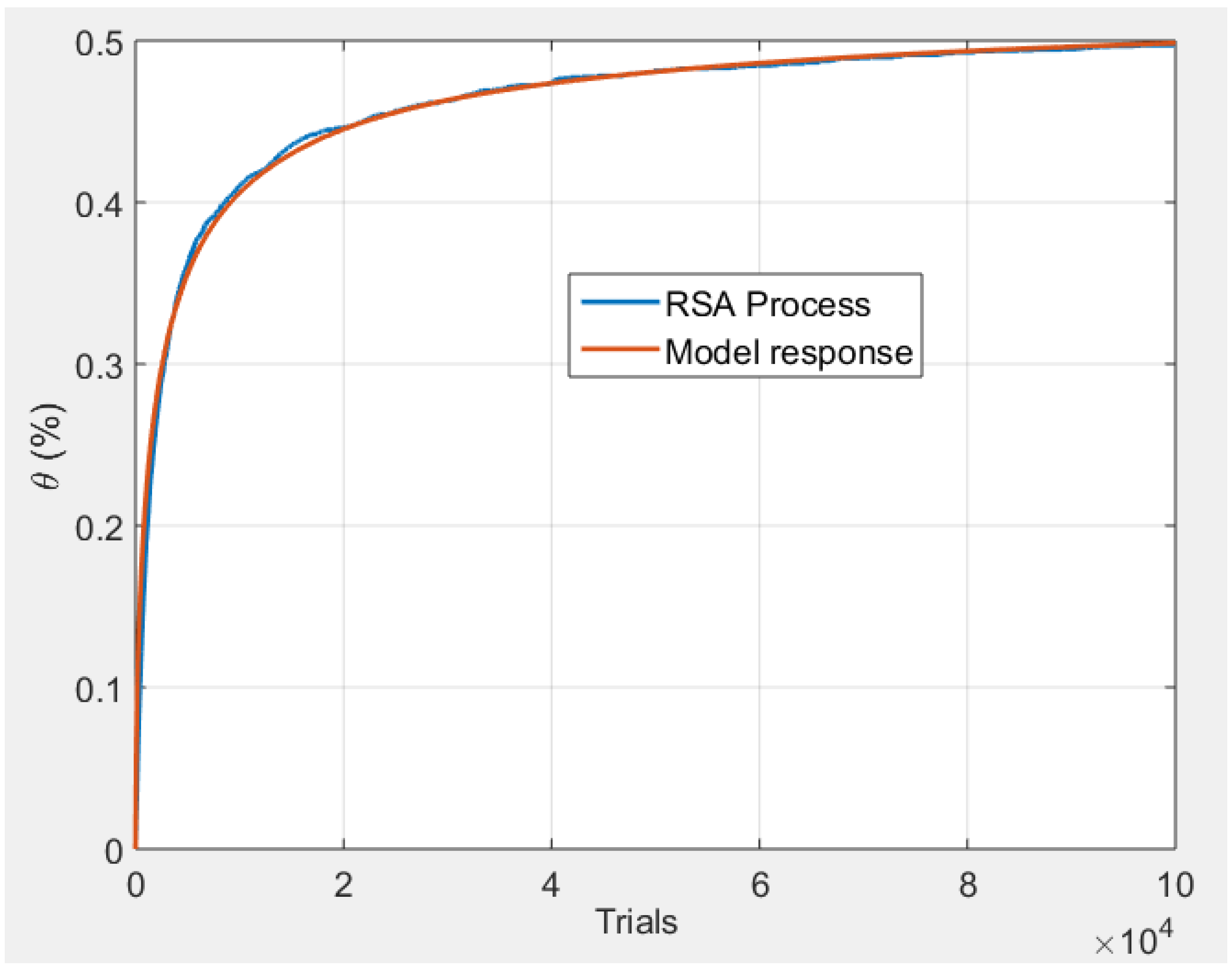
5.1. Case of Adsorption
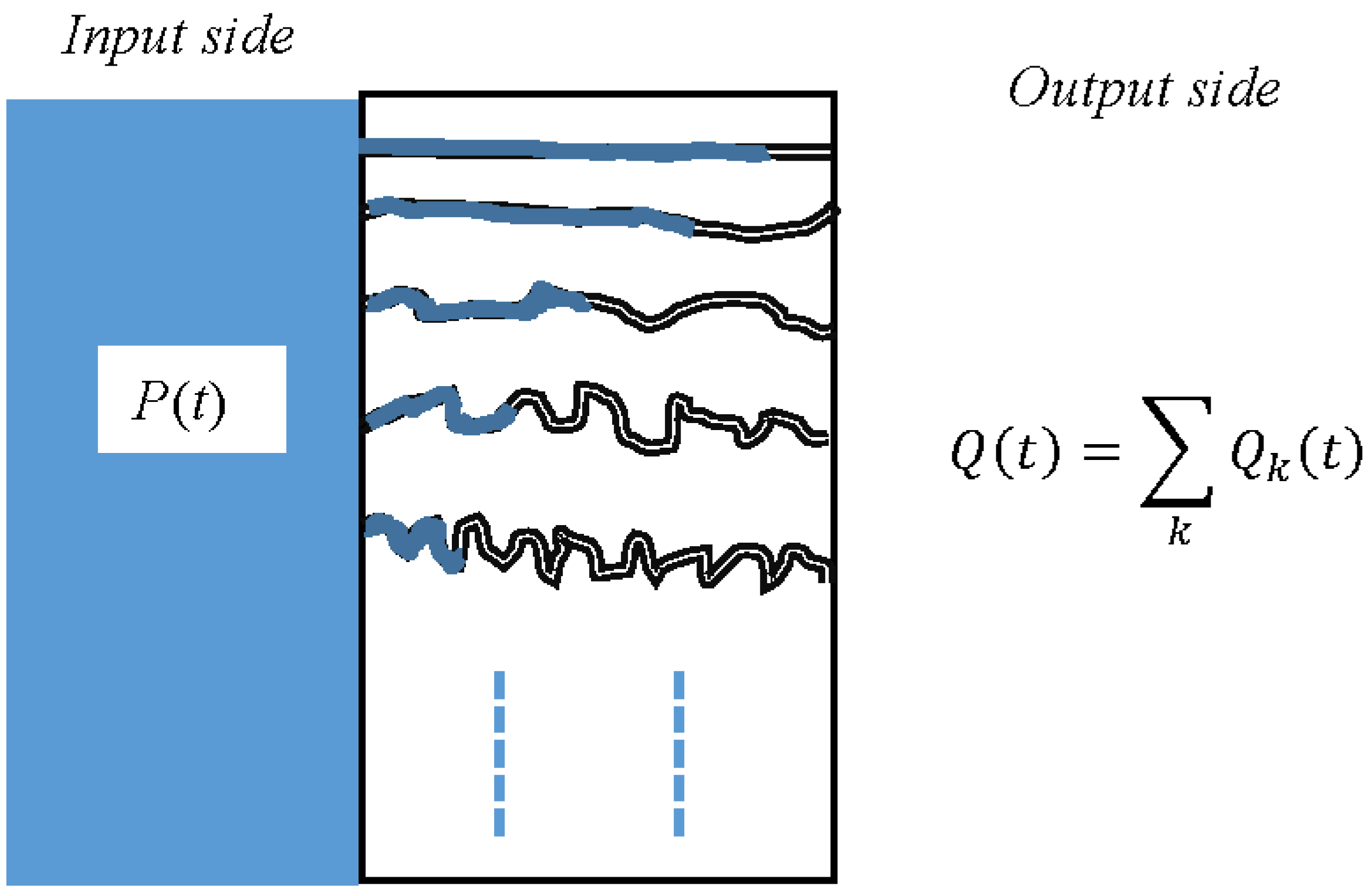
5.2. Case of Diffusion
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mandelbrot, B. The Fractal Geometry of Nature, 3rd ed.; W.H. Freeman and Comp.: New York, NY, USA, 1983. [Google Scholar]
- Kopelman, R. Fractal Reaction Kinetics. Science 1988, 241, 1620–1626. [Google Scholar] [CrossRef] [PubMed]
- Sapoval, B. Universalités et Fractales: Jeux d’enfant ou délits d’initié? Editions Flammarion: Paris, France, 1997. [Google Scholar]
- Le Mehaute, A.; Crepy, G. Introduction to transfer and motion in fractal media: The geometry of kinetics. Solid State Ion. 1983, 9–10, 17–30. [Google Scholar] [CrossRef]
- Krapivsky, P.L.; Redner, S.; Ben-Naim, E. A Kinetic View of Statistical Physics; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Freeborn, T.J.; Maundy, B.; Elwakil, A.S. Fractional-order models of supercapacitors, batteries and fuel cells: A survey. Mater. Renew. Sustain. Energy 2015, 4, 9. [Google Scholar] [CrossRef]
- Magin, R.L. Fractional calculus models of complex dynamics in biological tissues. Comput. Math. Appl. 2010, 59, 1586–1593. [Google Scholar] [CrossRef]
- Alhasan, A.S.H.; Saranya, S.; Al-Mdallal, Q.M. Fractional derivative modeling of heat transfer and fluid flow around a contracting permeable infinite cylinder, Computational study. Partial. Differ. Equ. Appl. Math. 2024, 11, 100794. [Google Scholar] [CrossRef]
- Hristov, J. Response functions in linear viscoelastic constitutive equations and related fractional operators. Math. Model. Nat. Phenom. 2019, 14, 305. [Google Scholar] [CrossRef]
- Monje, C.A.; Chen, Y.; Vinagre, B.M.; Xue, D.; Feliu, V. Fractional-order Systems and Controls: Fundamentals and Applications. In Advances in Industrial Control Series; Springer: London, UK, 2010. [Google Scholar]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon and Breach Science Publishers: New York, NY, USA, 1993. [Google Scholar]
- Dokoumetzidis, A.; Magin, R.; Macheras, P. A commentary on fractionalization of multi-compartmental models. Pharm. Pharm. 2010, 37, 203–207. [Google Scholar] [CrossRef]
- Balint, A.M.; Balint, S. Mathematical Description of the Groundwater Flow and that of the Impurity Spread, Which Use Temporal Caputo or Riemann-Liouville Fractional Partial Derivatives, Is Non-objective. Fractal Fract. 2020, 4, 36. [Google Scholar] [CrossRef]
- Pantokratoras, A. Comment on the paper “Fractional order model of thermo-solutal and magnetic nanoparticles transport for drug delivery applications, Subrata Maiti, Sachin Shaw, G.C. Shit, [Colloids Surf. B Biointerfaces, 203(2021) 111754]”. Colloids Surf. B Biointerfaces 2023, 222, 113074. [Google Scholar] [CrossRef]
- Mei, J. A Closer Look at Ion Transport; Nova Science Publishers: Hauppauge, NY, USA, 2025. [Google Scholar]
- Sabatier, J. Fractional Order Models Are Doubly Infinite Dimensional Models and thus of Infinite Memory: Consequences on Initialization and Some Solutions. Symmetry 2021, 13, 1099. [Google Scholar] [CrossRef]
- Trigeassou, J.C.; Maamri, N. Putting an End to the Physical Initial Conditions of the Caputo Derivative: The Infinite State Solution. Fractal Fract. 2025, 9, 252. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat, transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef]
- Montseny, G. Diffusive representation of pseudo-differential time-operators. ESAIM Proc. 1998, 5, 159–175. [Google Scholar] [CrossRef]
- Matignon, D. Stability properties for generalized fractional differential systems. ESAIM Proc. 1998, 5, 145–158. [Google Scholar] [CrossRef]
- Verhulst, P.F. Recherches Mathématiques sur la loi d’accroissement de la Population; Nouveaux Mémoires de L’académie Royale Des Sciences et Belles-Lettres de Bruxelles: Washington, DC, USA, 1845; Volume 18, pp. 14–54. [Google Scholar]
- Tartaglione, V.; Sabatier, J.; Farges, C. Adsorption on Fractal Surfaces: A Non Linear Modeling Approach of a Fractional Behavior. Fractal Fract. 2021, 5, 65. [Google Scholar] [CrossRef]
- Avrami, M. Kinetics of Phase Change. I General Theory. J. Chem. Phys. 1939, 7, 1103–1112. [Google Scholar] [CrossRef]
- Fanfoni, M.; Tomellini, M. The Johnson-Mehl-Avrami-Kohnogorov Model: A Brief Review. Nuovo C. D 1998, 20, 1171–1182. [Google Scholar] [CrossRef]
- Sun, H.; Wang, Y.; Yu, L.; Yu, X. A discussion on nonlocality: From fractional derivative model to peridynamic model. Commun. Nonlinear Sci. Numer. Simul. 2022, 114, 106604. [Google Scholar] [CrossRef]
- Sabatier, J. Beyond the Particular Case of Circuits with Geometrically Distributed Components for Approximation of Fractional Order Models: Application to a New Class of Model for Power Law Type Long Memory Behaviour Modelling. J. Adv. Res. 2020, 25, 243–255. [Google Scholar] [CrossRef]
- Sabatier, J. Power Law Type Long Memory Behaviors Modeled with Distributed Time Delay Systems. Fractal Fract. 2020, 4, 1. [Google Scholar] [CrossRef]
- Capelas de Oliveira, E.; Tenreiro, M.J.A. A review of definitions for fractional derivatives and integral. Math. Probl. Eng. 2014, 2014, 1–7. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Ortigueira, M.D.; Coito, F. From differences to derivatives. Fract. Calc. Appl. Anal. 2004, 7, 459–471. [Google Scholar]
- Oldham, K.; Spanier, J. The Fractional Calculus; Academic Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Masuda, N.; Porter, M.A.; Lambiotte, R. Random walks and diffusion on networks. Phys. Rep. 2017, 716–717, 1–58. [Google Scholar] [CrossRef]
- Zhang, B.; Yu, B.; Wang, H.; Yun, M. A fractal analysis of permeability for power-law fluids in porous media. Fractals 2006, 14, 171–177. [Google Scholar] [CrossRef]
- Sabatier, J. Probabilistic Interpretations of Fractional Operators and Fractional Behaviours: Extensions, Applications and Tribute to Prof. José Tenreiro Machado’s Ideas. Mathematics 2022, 10, 4184. [Google Scholar] [CrossRef]
- Sabatier, J.; Farges, C.; Tartaglione, V. Some alternative solutions to fractional models for modelling long memory behaviours. Mathematics 2020, 8, 196. [Google Scholar] [CrossRef]
- Sabatier, J. Fractional-Order Derivatives Defined by Continuous Kernels: Are They Really Too Restrictive? Fractal Fract. 2020, 4, 40. [Google Scholar] [CrossRef]
- Sabatier, J.; Frages, C. Time-Domain Fractional Behaviour Modelling with Rational Non-Singular Kernels. Axioms 2024, 13, 99. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables; National Bureau of Standards, Applied Mathematics Series, No. 55; first printing; U.S. Government Printing Office: Washington, DC, USA, 1964. [Google Scholar]
- Tseng, P.H.; Lee, T.C. Numerical evaluation of exponential integral: Theis well function approximation. J. Hydrol. 1998, 205, 38–51. [Google Scholar] [CrossRef]
- Ortega-Martínez, J.M.; Santos-Sánchez, O.J.; Rodríguez-Guerrero, L.; Mondié, S. On optimal control for linear distributed time-delay systems. Syst. Control. Lett. 2023, 177, 105548. [Google Scholar] [CrossRef]
- Rouquerol, F.; Rouquerol, J.; Sing, K.; Llewellyn, P.; Maurin, G. Adsorption by Powders and Porous Solids: Principles, Methodology and Applications, 2nd ed.; Academic Press: Oxford, UK, 2014. [Google Scholar]
- Hinrichsen, E.; Feder, J.; Jøssang, T. Geometry of random sequential adsorption. J. Stat. Phys. 1986, 44, 793–827. [Google Scholar] [CrossRef]
- Swendsen, R.H. Dynamics of random sequential adsorption. Phys. Rev. A 1981, 24, 504–508. [Google Scholar] [CrossRef]
- Zola, R.S.; Freire, F.C.M.; Lenzi, E.K.; Evangelista, L.R.; Barbero, G. Kinetic equation with memory effect for adsorption–desorption phenomena. Chem. Phys. Lett. 2007, 438, 144–147. [Google Scholar] [CrossRef]
- Kočiřík, M.; Tschirch, G.; Struve, P.; Martin Bülow, M. Application of the volterra integral equation to the mathematical modelling of adsorption kinetics under constant-volume/variable-concentration conditions. J. Chem. Soc. Faraday Trans. 1 Phys. Chem. Condens. Phases 1988, 84, 2247–2257. [Google Scholar] [CrossRef]
- Ortigueira, M.; Trujillo, J. Generalized Gruunwald-Letnikov Fractional Derivative and Its Laplace and Fourier Transforms. J. Comput. Nonlinear Dyn. 2011, 6, 034501. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sabatier, J. Distributed Time Delay Models: An Alternative to Fractional Calculus-Based Models for Fractional Behavior Modeling. Symmetry 2025, 17, 1101. https://doi.org/10.3390/sym17071101
Sabatier J. Distributed Time Delay Models: An Alternative to Fractional Calculus-Based Models for Fractional Behavior Modeling. Symmetry. 2025; 17(7):1101. https://doi.org/10.3390/sym17071101
Chicago/Turabian StyleSabatier, Jocelyn. 2025. "Distributed Time Delay Models: An Alternative to Fractional Calculus-Based Models for Fractional Behavior Modeling" Symmetry 17, no. 7: 1101. https://doi.org/10.3390/sym17071101
APA StyleSabatier, J. (2025). Distributed Time Delay Models: An Alternative to Fractional Calculus-Based Models for Fractional Behavior Modeling. Symmetry, 17(7), 1101. https://doi.org/10.3390/sym17071101