

Gregory Polynomials Within Sakaguchi-Type Function Classes: Analytical Estimates and Geometric Behavior


Abstract
1. Introduction, Definitions and Motivation
- Section 3 focuses on deriving sharp upper bounds for the initial Taylor coefficients, highlighting how particular parameter choices influence these bounds.
- Section 4 establishes new Fekete–Szegö inequalities within the defined class, emphasizing their significance in extending classical results and exploring the analytic properties of the related functions.
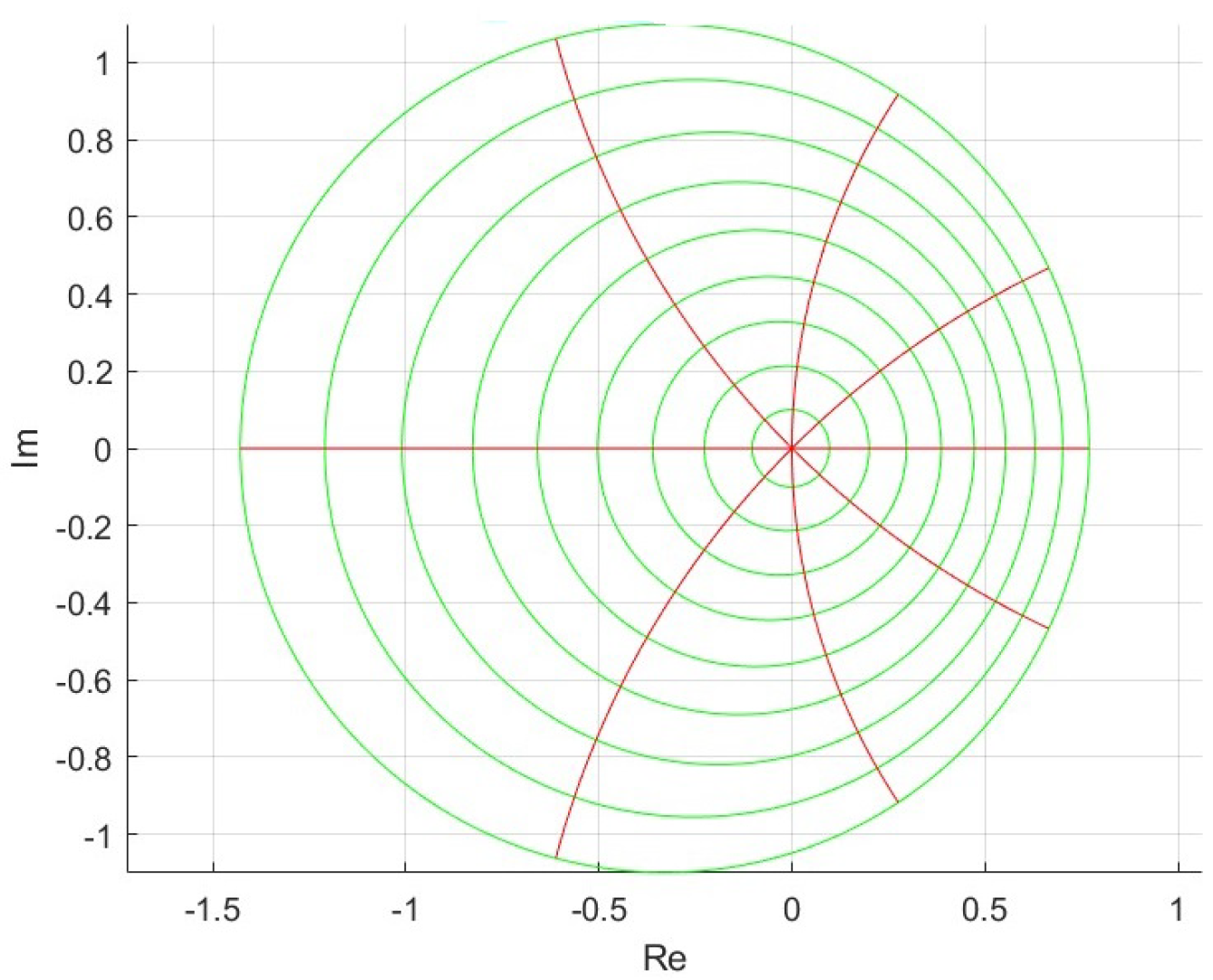
2. Definition and Visualization of the Class
- For , the subclass is defined by:
- For , the subclass simplifies to:
- For , the subclass takes the form:
- For , the subclass takes the form:
- For and , the subclass reduces to:
- For , the subclass takes the form:
- For and , the subclass reduces to
- For and , the subclass reduces to:
- For and , the subclass reduces to:
- For , , and general , the subclass also takes the same form:
3. Main Results
- (i)
- Applying in Theorems 1 and 2 yields the following results for even values of n:
- (ii)
- Similarly, applying in Theorems 1 and 2 yields the following results for odd values of n:
4. Conclusions
- Extending coefficient estimates to higher-order terms.
- Broadening the use of subordination techniques to other subclasses of analytic functions.
- Investigating additional subclasses within the bi-univalent function framework.
- Exploring the impact of graphical and geometric representations in establishing sharp inequalities.
- Applying the introduced class to convolution operators or integral transforms to study further analytic properties.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jordan, C. The Calculus of Finite Differences; Chelsea Publishing Company: New York, NY, USA, 1947. [Google Scholar]
- Comtet, L. Advanced Combinatorics, 2nd ed.; D. Reidel Publishing Company: Boston, MA, USA, 1974. [Google Scholar]
- Davis, H.T. The approximation of logarithmic numbers. Amer. Math. Mon. 1957, 64, 11–18. [Google Scholar] [CrossRef]
- Berezin, I.S.; Zhidkov, N.P. Computing Methods; Pergamon Press: Oxford, UK, 1965. [Google Scholar]
- Phillips, G.M. Gregory’s Method for Numerical Integration. Am. Math. Mon. 1972, 79, 270–274. [Google Scholar] [CrossRef]
- Qi, F.; Zhao, J.-L. Some Properties of the Bernoulli Numbers of the Second Kind and Their Generating Function. Bull. Korean Math. Soc. 2018, 55, 1909–1920. [Google Scholar] [CrossRef]
- Blagouchine, I.V. Expansions of Generalized Euler’s Constants into the Series of Polynomials in π−2 and into the Formal Enveloping Series with Rational Coefficients Only. J. Number Theory 2016, 158, 365–396. [Google Scholar] [CrossRef]
- Blagouchine, I.V. Three Notes on Ser’s and Hasse’s Representations for the Zeta-Functions. Integers 2018, 18, A4. Available online: https://math.colgate.edu/~integers/a4/a4.pdf (accessed on 9 May 2025).
- Merlini, D.; Sprugnoli, R.; Verri, M.C. The Cauchy numbers. Discret. Math. 2006, 306, 1906–1920. [Google Scholar] [CrossRef]
- Blagouchine, I.V. Two Series Expansions for the Logarithm of the Gamma Function Involving Stirling Numbers and Containing Only Rational Coefficients for Certain Arguments Related to π−1. J. Math. Anal. Appl. 2016, 442, 404–434. [Google Scholar] [CrossRef]
- Liu, H.M.; Qi, S.H.; Ding, S.Y. Some recurrence relations for Cauchy numbers of the first kind. J. Integer Seq. 2010, 13, 10.2.3. [Google Scholar]
- Nemes, G. An asymptotic expansion for the Bernoulli numbers of the second kind. J. Integer Seq. 2011, 14, 11.4.8. [Google Scholar]
- Qi, F.; Zhang, X.-J. An integral representation, some inequalities, and complete monotonicity of Bernoulli numbers of the second kind. Bull. Korean Math. Soc. 2015, 52, 987–998. [Google Scholar] [CrossRef]
- Young, P.T. A 2-adic formula for Bernoulli numbers of the second kind and for the Nörlund numbers. J. Number Theory 2008, 128, 2951–2962. [Google Scholar] [CrossRef]
- Kowalenko, V. Properties and applications of the reciprocal logarithm numbers. Acta Appl. Math. 2010, 109, 413–437. [Google Scholar] [CrossRef]
- Alabdulmohsin, I.M. Summability Calculus: A Comprehensive Theory of Fractional Finite Sums; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Duren, P.L. Univalent Functions; Grundlehren der Mathematischen Wissenschaften; Springer: New York, NY, USA, 1983; Volume 259. [Google Scholar]
- Lewin, M. On a Coefficient Problem for Bi-univalent Functions. Proc. Am. Math. Soc. 1967, 18, 63–68. [Google Scholar] [CrossRef]
- Brannan, D.A.; Taha, T.S. On Some Classes of Bi-univalent Functions. Stud. Univ. Babeș-Bolyai Math. 1986, 31, 70–77. [Google Scholar]
- Netanyahu, E. The Minimal Distance of the Image Boundary from the Origin and the Second Coefficient of a Univalent Function in |z|<1. Arch. Ration. Mech. Anal. 1969, 32, 100–112. [Google Scholar]
- Tan, D.L. Coefficient Estimates for Bi-univalent Functions. Chin. Ann. Math. Ser. A 1984, 5, 559–568. [Google Scholar]
- Akgül, A. Fekete–Szegö Variations for Some New Classes of Analytic Functions Explained over Poisson and Borel Distribution Series. Math. Methods Appl. Sci. 2025, 48, 9241–9252. [Google Scholar] [CrossRef]
- Akgül, A. On a New Subclass of Bi-univalent Analytic Functions Characterized by (P, Q)-Lucas Polynomial Coefficients via Sălăgean Differential Operator. In Operators, Inequalities and Approximation: Theory and Applications; Tripathy, B.C., Paikray, S.K., Dutta, H., Jena, B.B., Eds.; Springer Nature: Singapore, 2024; pp. 159–182. [Google Scholar] [CrossRef]
- Singh, G.; Singh, G.; Singh, G. Certain Subclasses of Sakaguchi-type Bi-univalent Functions. Ganita 2019, 69, 45–55. [Google Scholar]
- Srivastava, H.M.; Mishra, A.K.; Gochhayat, P. Certain Subclasses of Analytic and Bi-univalent Functions. Appl. Math. Lett. 2010, 23, 1188–1192. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Wanas, A.K.; Güney, H.Ö. New Families of Bi-univalent Functions Associated with the Bazilevič Functions and the k-Pseudo-starlike Functions. Iran. J. Sci. Technol. Trans. A Sci. 2021, 45, 1799–1804. [Google Scholar] [CrossRef]
- Altınkaya, Ş.; Yalçın, S. On the Chebyshev Polynomial Coefficient Problem of Some Subclasses of Bi-univalent Functions. Gulf J. Math. 2017, 5, 34–40. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Altınkaya, Ş.; Yalçın, S. Certain Subclasses of Bi-univalent Functions Associated with the Horadam Polynomials. Iran. J. Sci. Technol. Trans. A Sci. 2019, 43, 1873–1879. [Google Scholar] [CrossRef]
- Lindelöf, E. Mémoire sur certaines inégalités dans la théorie des fonctions monogènes et sur quelques propriétés nouvelles de ces fonctions dans le voisinage d’un point singulier essentiel. Ann. Soc. Sci. Fenn. 1909, 35, 1–35. [Google Scholar]
- Rogosinski, W.; Szegö, G. Über die Abschätzungen von Potenzreihen, die in einem Kreise beschränkt bleiben. Math. Z. 1928, 28, 73–94. [Google Scholar] [CrossRef]
- Rogosinski, W. On the coefficients of subordinate functions. Proc. Lond. Math. Soc. 1943, 48, 48–82. [Google Scholar] [CrossRef]
- Littlewood, J.E. Lectures on the Theory of Functions; Oxford University Press: Oxford, UK, 1944. [Google Scholar]
- Robertson, M.S. Quasi-subordination and coefficient conjecture. Bull. Amer. Math. Soc. 1970, 76, 1–9. [Google Scholar] [CrossRef]
- Goodman, A.W. Univalent Functions; Mariner Publishing Company Inc.: Tampa, FL, USA, 1983; Volume 1–2. [Google Scholar]
- Pommerenke, C. Univalent Functions; Vandenhoeck & Ruprecht: Göttingen, Germany, 1975. [Google Scholar]
- Ma, W.; Minda, D. A Unified Treatment of Some Special Classes of Univalent Functions. In Proceedings of the Conference on Complex Analysis; Li, Z., Ren, F., Yang, L., Zhang, S., Eds.; International Press: Vienna, Austria, 1994; pp. 157–169. [Google Scholar]
- Nevanlinna, R.H. Über die konforme Abbildung von Sterngebieten. Översikt Vetenskaps-Soc. Förh./A 1921, 63, 1–21. [Google Scholar]
- Goluzin, G.M. Geometric Theory of Functions of a Complex Variable; American Mathematical Society: Providence, RI, USA, 1969; Volume 26. (In Russian) [Google Scholar]
- Sakaguchi, K. On a Certain Univalent Mapping. J. Math. Soc. Jpn. 1959, 11, 72–75. [Google Scholar] [CrossRef]
- Owa, S.; Sekine, T.; Yamakawa, R. On Sakaguchi Type Functions. Appl. Math. Comput. 2007, 187, 356–361. [Google Scholar] [CrossRef]
- Obradović, M. A Class of Univalent Functions. Hokkaido Math. J. 1998, 27, 329–335. [Google Scholar] [CrossRef]
- Sharma, P.; Raina, R.K. On a Sakaguchi Type Class of Analytic Functions Associated with Quasi-subordination. Comment. Math. Univ. St. Pauli 2015, 64, 59–70. [Google Scholar]
- Srivastava, H.M.; Hussain, S.; Raziq, A.; Raza, M. The Fekete–Szegö Functional for a Subclass of Analytic Functions Associated with Quasi-subordination. Carpathian J. Math. 2018, 34, 103–113. [Google Scholar] [CrossRef]
- Kilar, N.; Şimşek, Y. Computational formulas and identities for new classes of Hermite-based Milne–Thomson type polynomials. Math. Meth. Appl. Sci. 2021, 44, 6731–6762. [Google Scholar] [CrossRef]
- Kilar, N.; Kim, D.; Şimşek, Y. Formulae bringing to light from certain classes of numbers and polynomials. Rev. Real Acad. Cienc. Exactas Fís. Nat. Ser. A-Mat. 2023, 117, 27. [Google Scholar] [CrossRef]
- Keogh, F.R.; Merkes, E.P. A Coefficient Inequality for Certain Classes of Analytic Functions. Proc. Am. Math. Soc. 1969, 20, 8–12. [Google Scholar] [CrossRef]
- Szegő, G. Orthogonal Polynomials, 4th ed.; American Mathematical Society Colloquium Publications; American Mathematical Society: Providence, RI, USA, 1975; Volume 23. [Google Scholar]
- Fekete, M.; Szegő, G. Eine Bemerkung über ungerade schlichte Funktionen. J. Lond. Math. Soc. 1933, 8, 85–89. [Google Scholar] [CrossRef]
- Mohd, M.H.; Darus, M. Fekete–Szegö problems for quasi-subordination classes. Abstr. Appl. Anal. 2012, 2012, 192956. [Google Scholar] [CrossRef]
- Kanas, S.; Darwish, H.E. Fekete–Szegö problem for starlike and convex functions of complex order. Appl. Math. Lett. 2010, 23, 777–782. [Google Scholar] [CrossRef]
- Akgül, A.; Altınkaya, Ş. Coefficient Estimates Associated with a New Subclass of Bi-Univalent Functions. Acta Univ. Apulensis 2017, 52, 121–128. [Google Scholar] [CrossRef]
- Akgül, A.; Sakar, F.M. A New Characterization of (P,Q)-Lucas Polynomial Coefficients of the Bi-Univalent Function Class Associated with the q-Analogue of Noor Integral Operator. Afr. Mat. 2022, 33, 87. [Google Scholar] [CrossRef]
- Akgül, A.; Sakar, F.M. A Certain Subclass of Bi-univalent Analytic Functions Introduced by Means of the q-Analogue of Noor Integral Operator and Horadam Polynomials. Turk. J. Math. 2019, 43, 2275–2286. [Google Scholar] [CrossRef]
- Abirami, C.; Magesh, N.; Yamini, J.; Kargar, R. Horadam Polynomial Coefficient Estimates for the Classes of α-Bi-Pseudo-Starlike and Bi-Bazilevič Functions. J. Anal. 2020, 28, 951–960. [Google Scholar] [CrossRef]
- Patil, A.B.; Shaba, T.G. Sharp Initial Coefficient Bounds and the Fekete–Szegö Problem for Some Subclasses of Analytic and Bi-univalent Functions. Ukr. Math. J. 2023, 75, 225–234. [Google Scholar] [CrossRef]
- Karthikeyan, K.R.; Mohankumar, D.; Breaz, D. A Comprehensive Class of Starlike Functions Involving Mittag–Leffler Function. Appl. Math. Sci. Eng. 2025, 33, 2487531. [Google Scholar] [CrossRef]
- Abbas, M.; Alhefthi, R.K.; Breaz, D.; Arif, M. On Coefficient Inequalities for Functions of Symmetric Starlike Related to a Petal-Shaped Domain. Axioms 2025, 14, 165. [Google Scholar] [CrossRef]
- Amourah, A.; Salleh, Z.; Frasin, B.A.; Khan, M.G.; Ahmad, B. Subclasses of Bi-univalent Functions Subordinate to Gegenbauer Polynomials. Afr. Mat. 2023, 34, 41. [Google Scholar] [CrossRef]
- Cotîrlă, L.I.; Wanas, A.K. Coefficient-Related Studies and Fekete–Szegö Type Inequalities for New Classes of Bi-starlike and Bi-convex Functions. Symmetry 2022, 14, 2263. [Google Scholar] [CrossRef]
- Murugusundaramoorthy, G.; Vijaya, K. Certain Subclasses of Analytic Functions Associated with Generalized Telephone Numbers. Symmetry 2022, 14, 1053. [Google Scholar] [CrossRef]
- Orhan, H.; Masih, V.S.; Ebadian, A. Coefficient Estimates for Power Bi–univalent Ma–Minda Starlike and Derivative Functions. J. Anal. 2025. [Google Scholar] [CrossRef]
- Oros, G.I.; Cotîrlă, L.I. Coefficient Estimates and the Fekete–Szegö Problem for New Classes of m-Fold Symmetric Bi-univalent Functions. Mathematics 2022, 10, 129. [Google Scholar] [CrossRef]
- Murugusundaramoorthy, G.; Vijaya, K.; Bulboacă, T. Initial Coefficient Bounds for Bi-univalent Functions Related to Gregory Coefficients. Mathematics 2023, 11, 2857. [Google Scholar] [CrossRef]
- Kazımoğlu, S.; Deniz, E.; Srivastava, H.M. Sharp Coefficient Bounds for Starlike Functions Associated with Gregory Coefficients. Complex Anal. Oper. Theory 2024, 18, 6. [Google Scholar] [CrossRef]
- Panigrahi, T.; Jena, S.; El-Ashwah, R.M. Certain Properties of Bazilevič-Type Univalent Class Defined Through Subordination. Afr. Mat. 2024, 35, 75. [Google Scholar] [CrossRef]
- Tang, H.; Mujahid, Z.; Khan, N.; Tchier, F.; Ghaffar Khan, M. Generalized Bounded Turning Functions Connected with Gregory Coefficients. Axioms 2024, 13, 359. [Google Scholar] [CrossRef]
- Bulut, S. Faber polynomial coefficient estimates for analytic bi-univalent functions associated with Gregory coefficients. Korean J. Math. 2024, 32, 285–295. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Cho, N.E.; Alderremy, A.A.; Lupas, A.A.; Mahmoud, E.E.; Khan, S. Sharp inequalities for a class of novel convex functions associated with Gregory polynomials. J. Inequal. Appl. 2024, 2024, 140. [Google Scholar] [CrossRef]
- Carathéodory, C. Über den Variabilitätsbereich der Koeffizienten von Potenzreihen, die Gegebene Werte Nicht Annehmen. Math. Ann. 1907, 64, 95–115. [Google Scholar] [CrossRef]
- Carathéodory, C. Über den Variabilitätsbereich der Fourier’schen Konstanten von Positiven Harmonischen Funktionen. Rend. Circ. Mat. Palermo 1911, 32, 193–217. [Google Scholar] [CrossRef]
- Zaprawa, P. Estimates of Initial Coefficients for Bi-univalent Functions. Abstr. Appl. Anal. 2014, 2014, 357480. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akgül, A.; Oros, G.I. Gregory Polynomials Within Sakaguchi-Type Function Classes: Analytical Estimates and Geometric Behavior. Symmetry 2025, 17, 884. https://doi.org/10.3390/sym17060884
Akgül A, Oros GI. Gregory Polynomials Within Sakaguchi-Type Function Classes: Analytical Estimates and Geometric Behavior. Symmetry. 2025; 17(6):884. https://doi.org/10.3390/sym17060884
Chicago/Turabian StyleAkgül, Arzu, and Georgia Irina Oros. 2025. "Gregory Polynomials Within Sakaguchi-Type Function Classes: Analytical Estimates and Geometric Behavior" Symmetry 17, no. 6: 884. https://doi.org/10.3390/sym17060884
APA StyleAkgül, A., & Oros, G. I. (2025). Gregory Polynomials Within Sakaguchi-Type Function Classes: Analytical Estimates and Geometric Behavior. Symmetry, 17(6), 884. https://doi.org/10.3390/sym17060884