
Capture in Regime of a Trapped Motion with Further Inelastic Collision for Finite-Sized Asteroid in ER3BP



Abstract
:1. Introduction
2. Convenient form of Equations of Motion for Further Solving Procedure
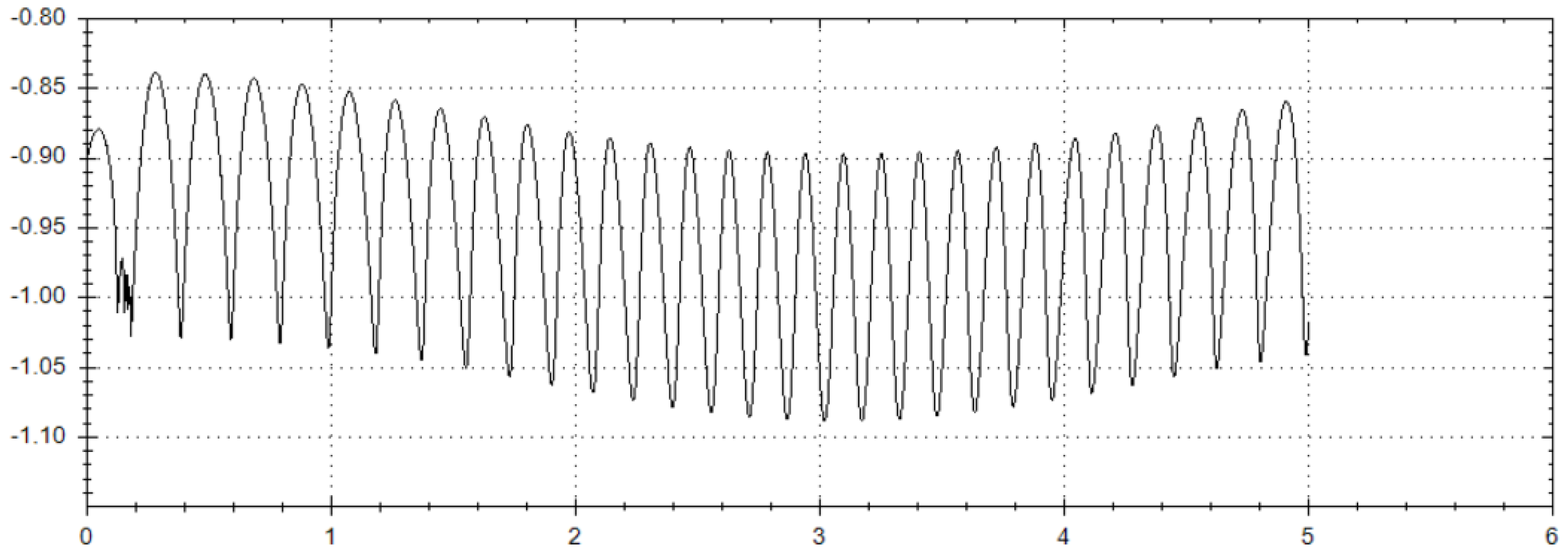
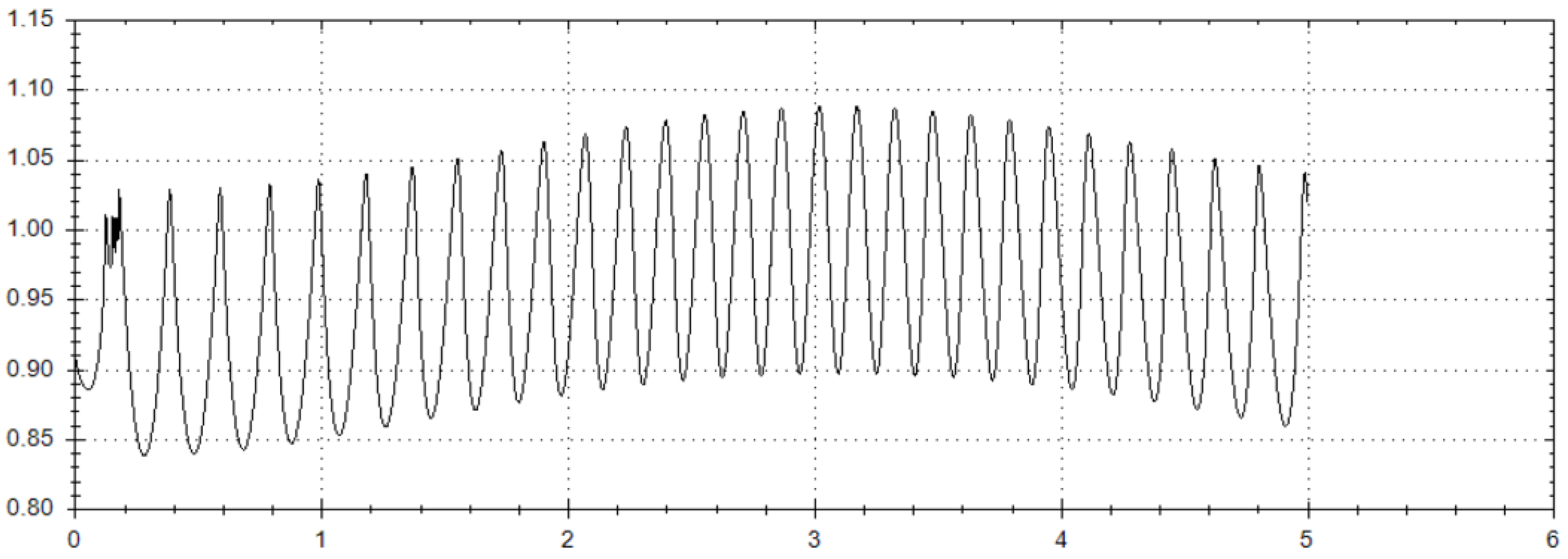
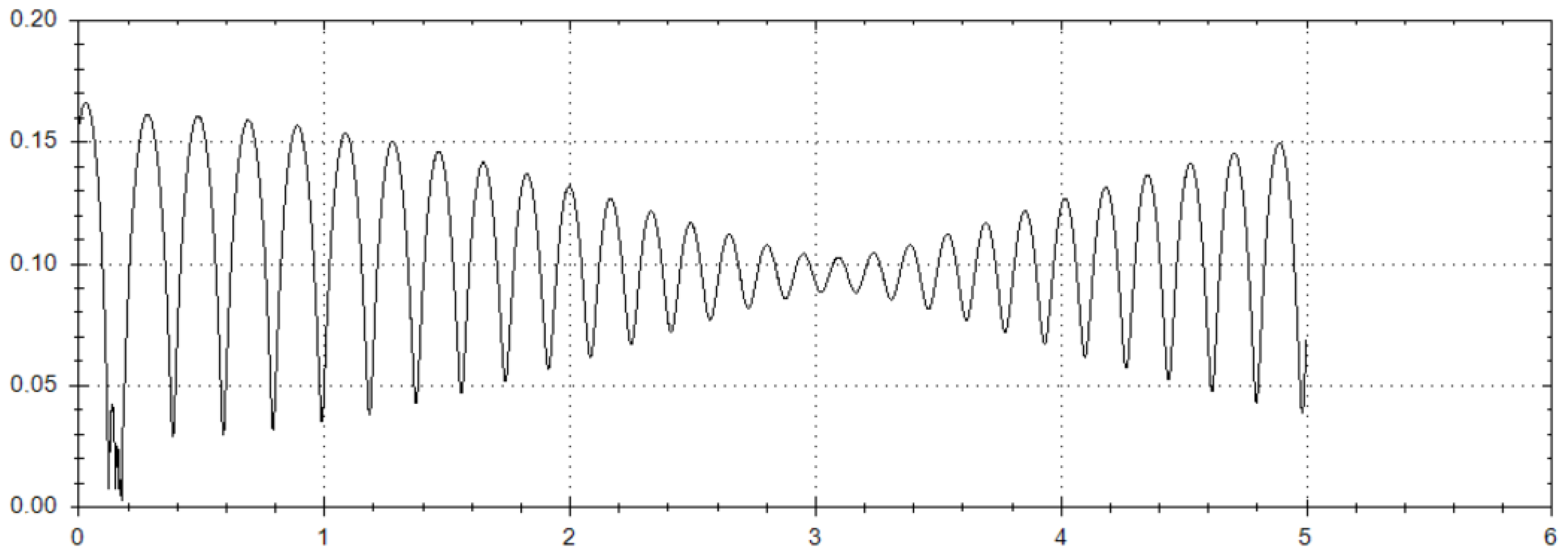
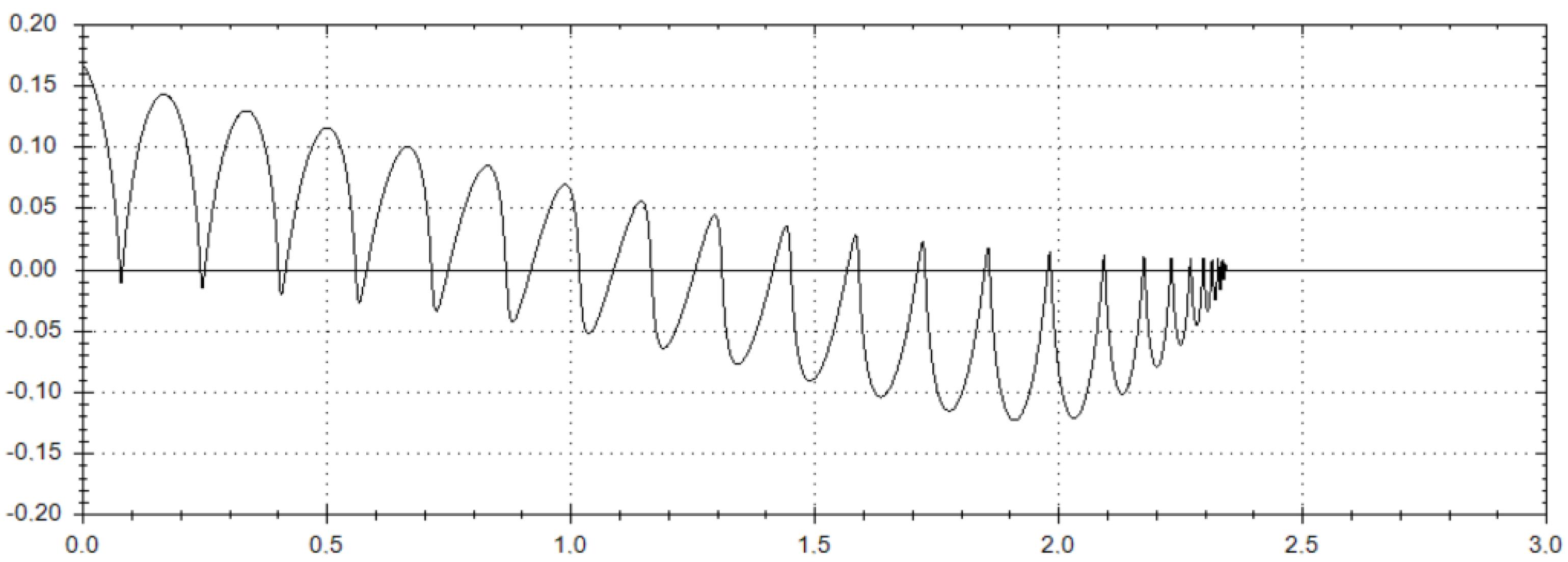
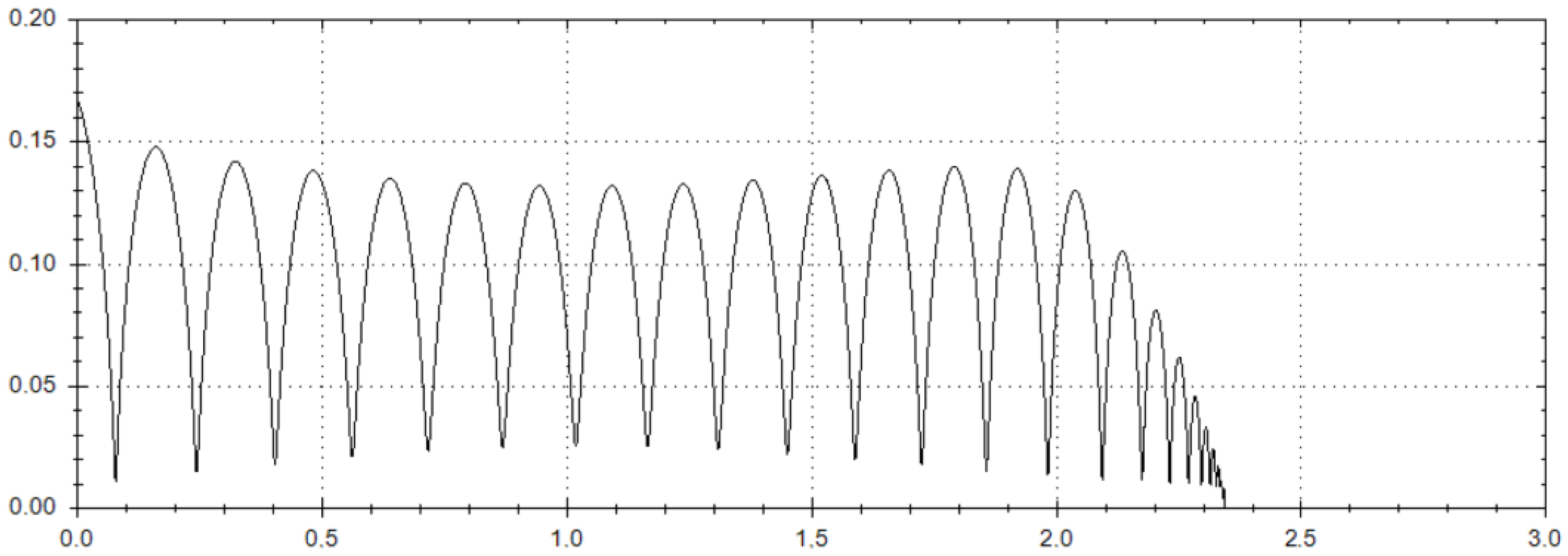
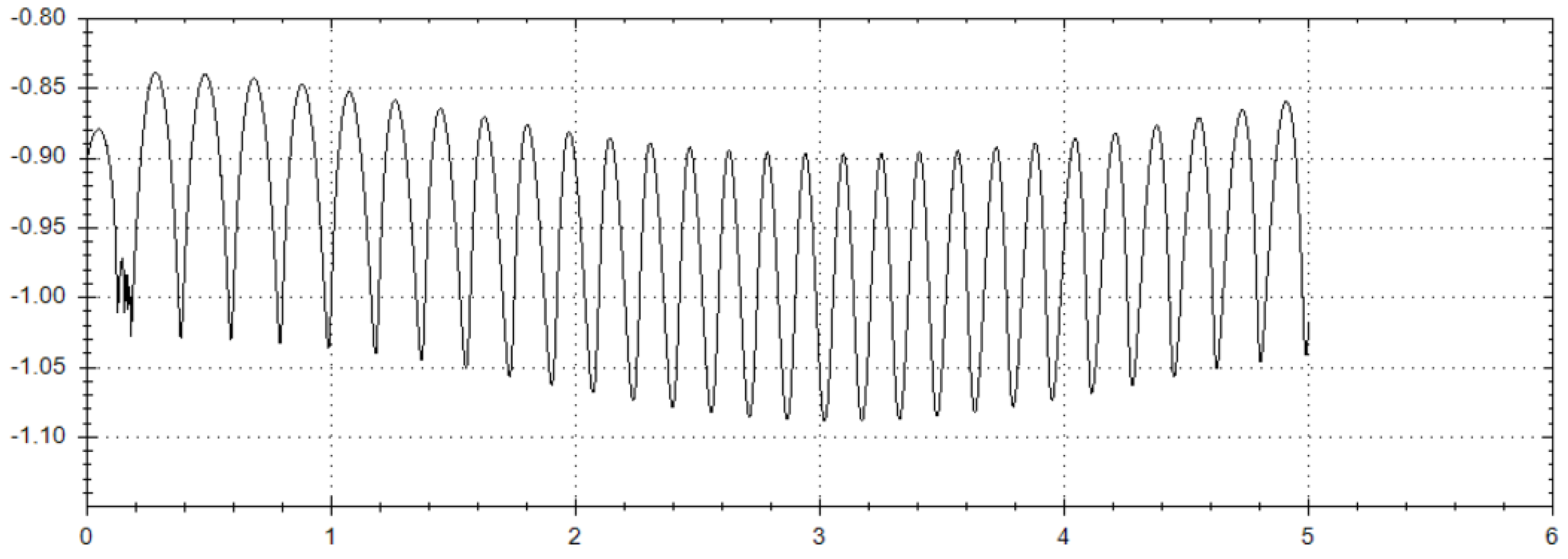
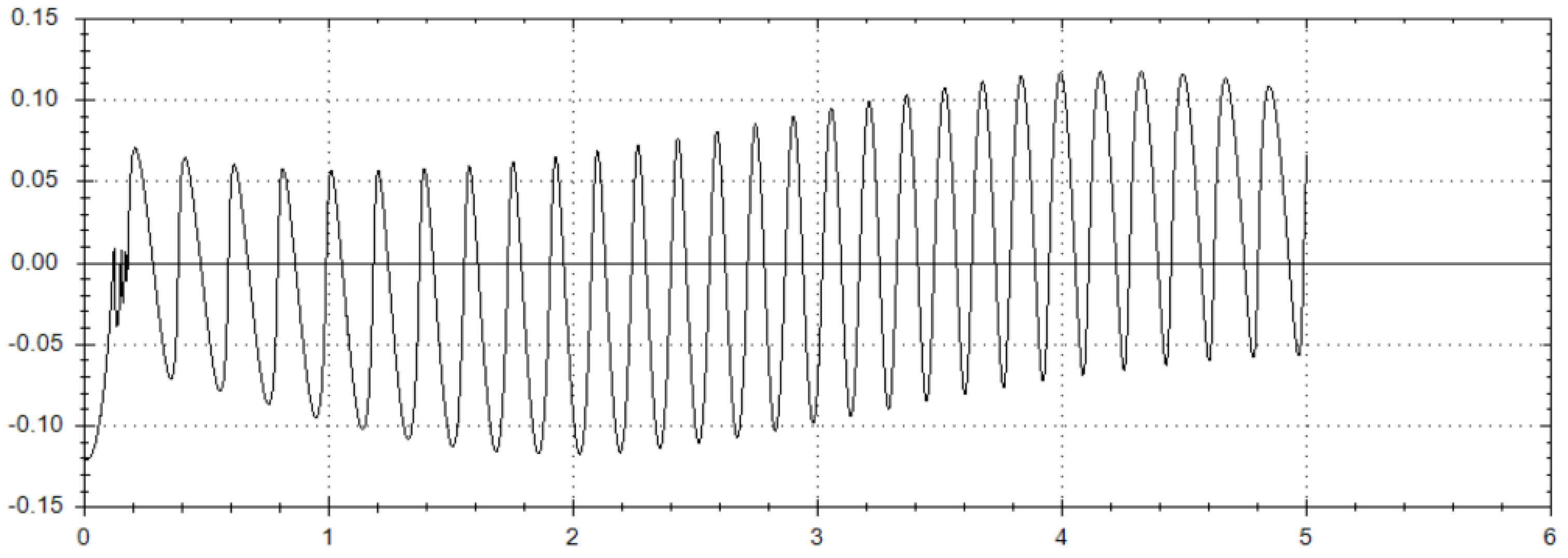
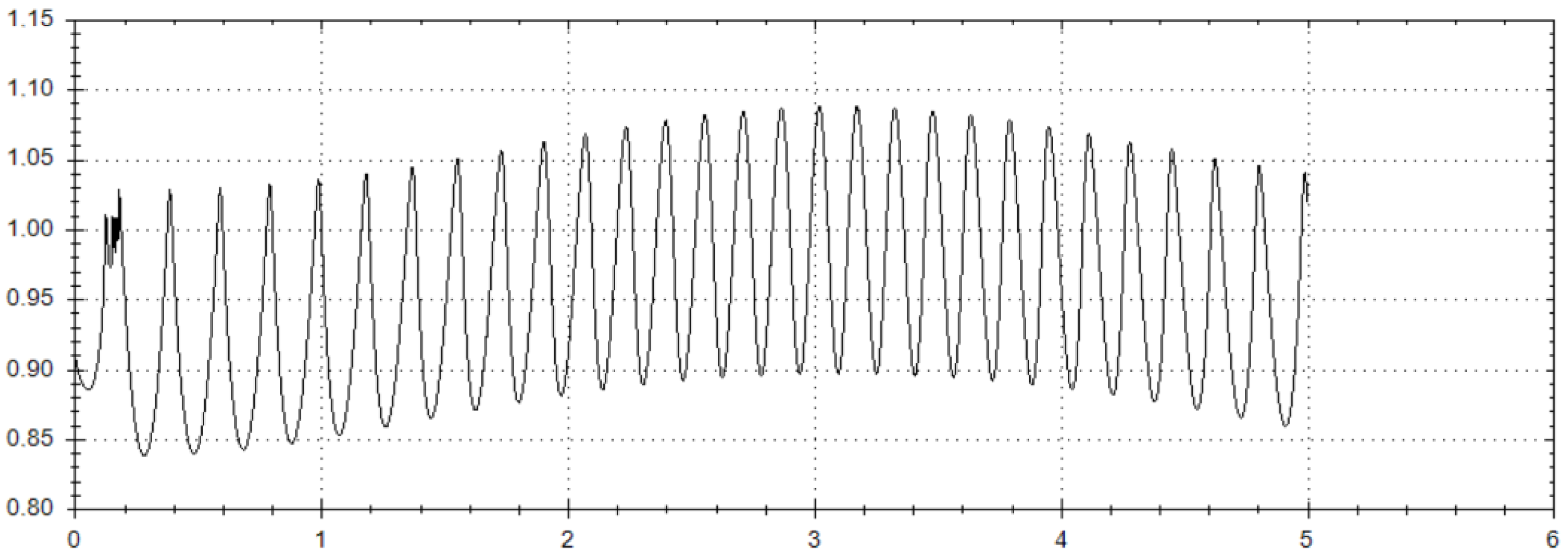
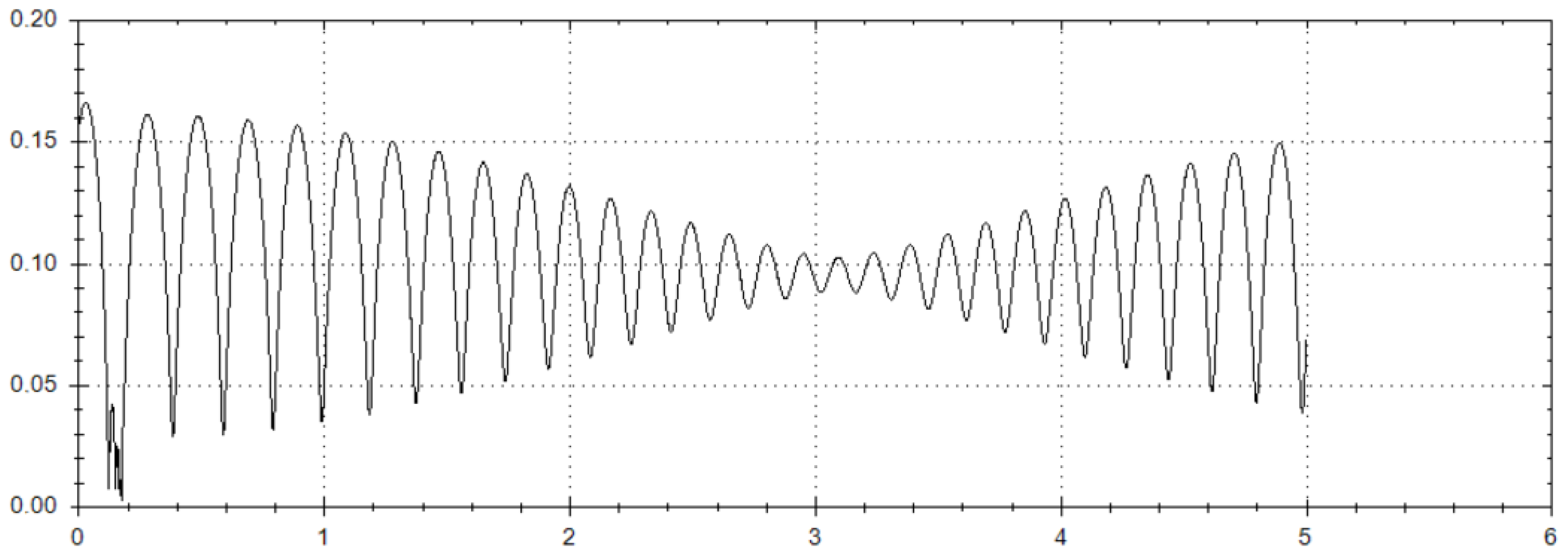
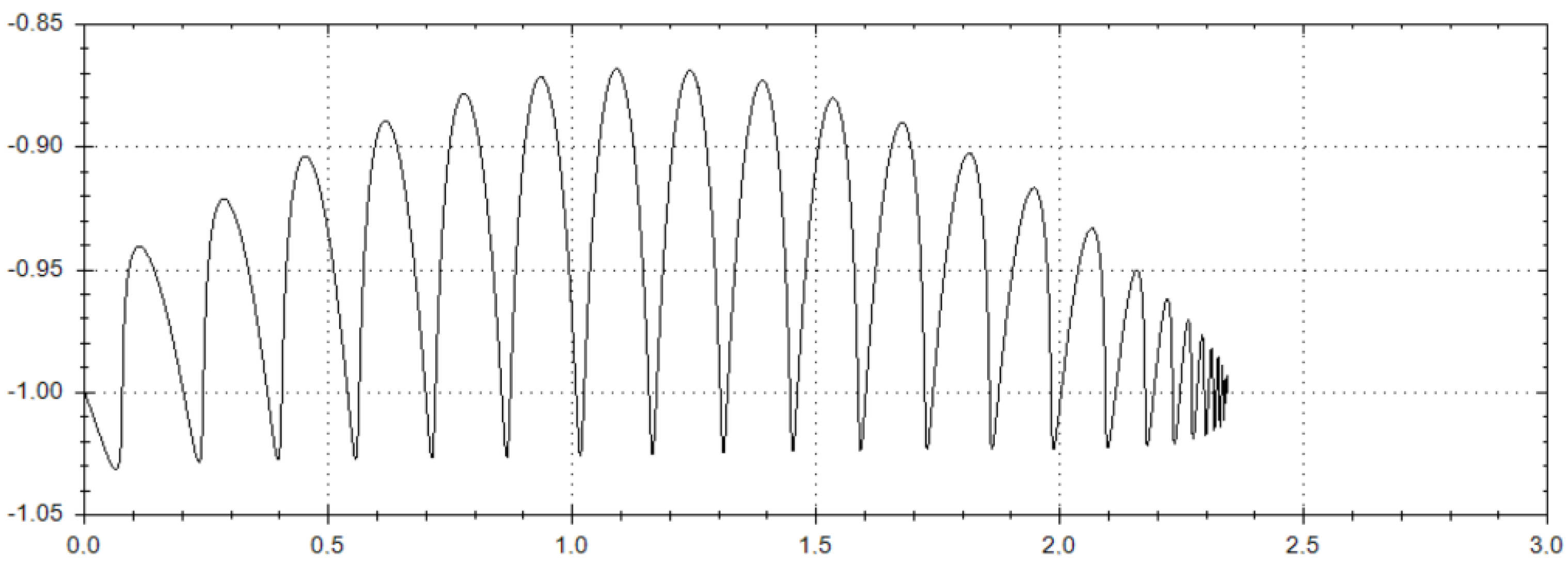
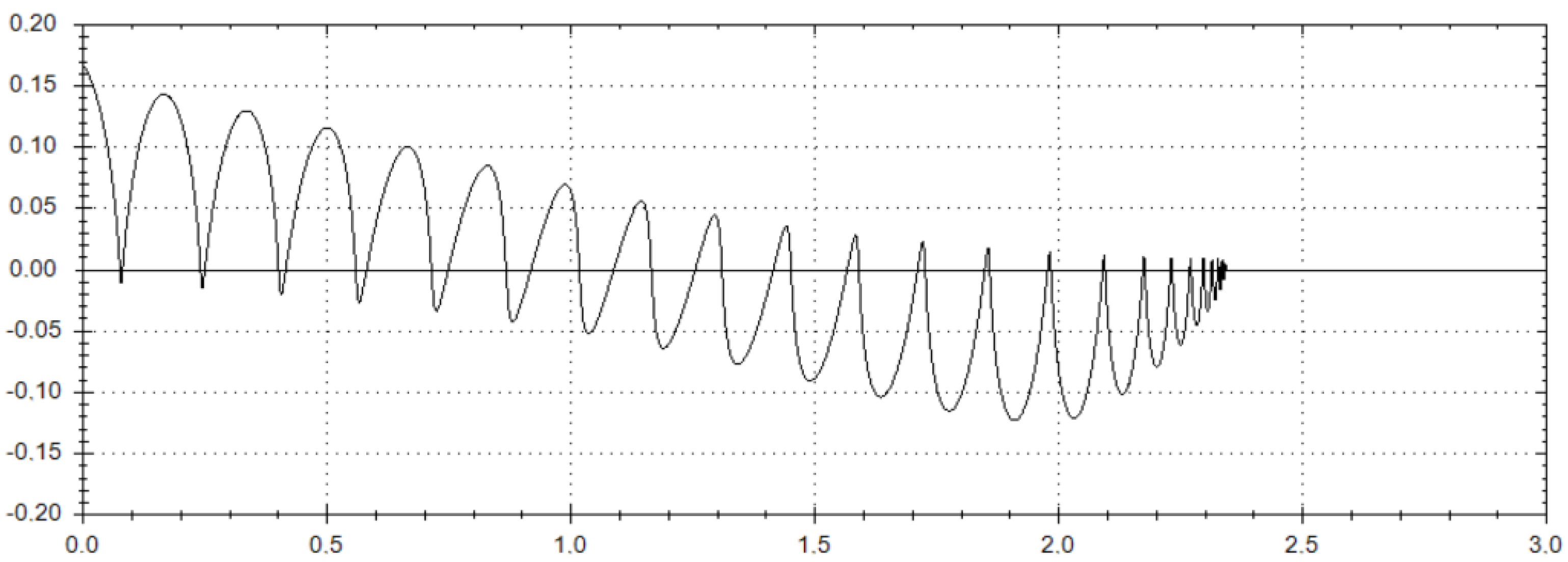
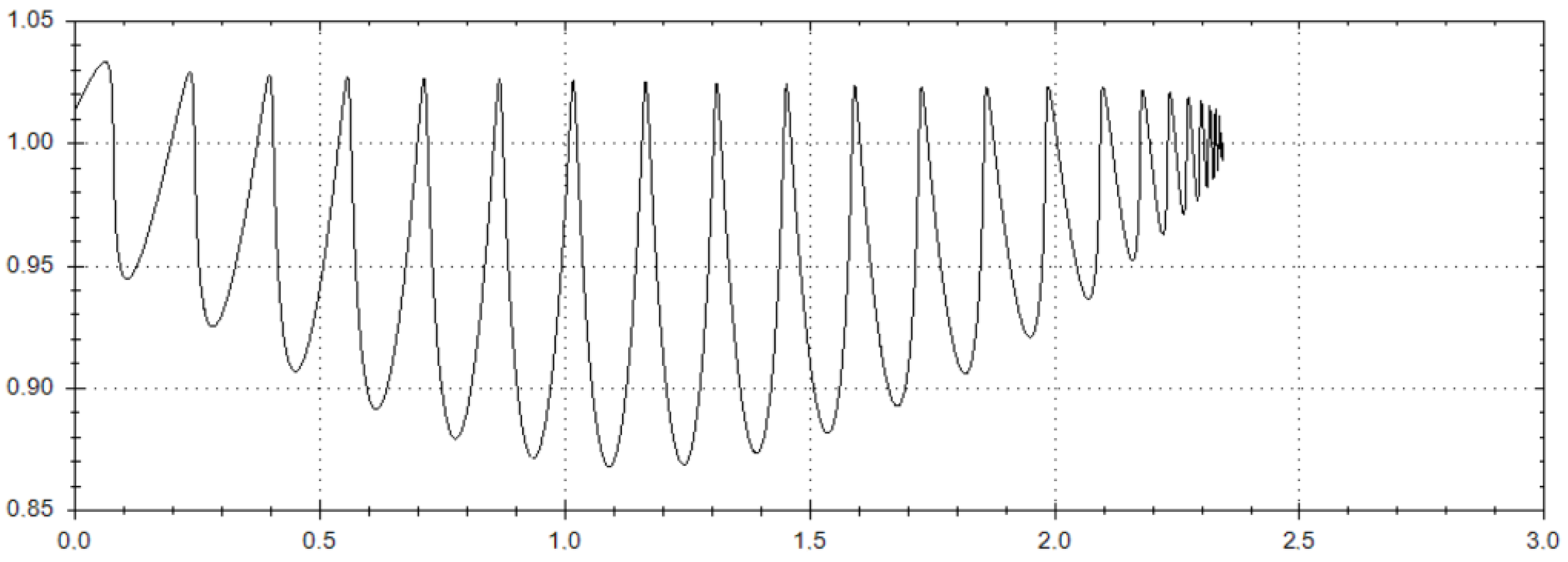
3. Graphical Plots for Numerical Solutions
- First, we choose from the very beginning the set of initial data with zero values;
- Then, we initiate the numerical solving of system (1) using the Runge–Kutta fourth-order method with step 0.001 starting from the abovementioned set of initial conditions;
- In the case where we obtain the required positive result (which is associated with recognizing the dynamical features of the projectile’s trapped motion when approaching the large asteroid during such celestial motion in ER3PB), the algorithm will be stopped;
- In the case where we obtain a negative result, initial data should be shifted by step (+/−) 0.001 with respect to the absolute magnitudes of the initial conditions. Hereafter, the algorithm should work during the next cycles of numerical calculating up to reaching the positive result.
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| H | absolute magnitude, a measure of the luminosity of asteroid on an inverse logarithmic magnitudes scale, dimensionless |
| p | geometric albedo, dimensionless |
| m | mass of finite-sized small asteroid or projectile (of ellipsoidal form), kg |
| mp | mass of large asteroid or minor planet (here, Ceres), kg |
| MSun | mass of Sun, kg |
| = {x, y} | coordinates of the scaled, pulsating, planar coordinate system, dimensionless |
| e | eccentricity, dimensionless |
| f | the true anomaly (in radians), rad |
| h | the extent of deviation of projectile from symmetrical form of ellipsoid of rotation, dimensionless |
| r1 | distance of projectile m from MSun, dimensionless |
| r2 | distance of projectile m from Ceres, dimensionless |
| Rp | radius of minor planet or large asteroid (here, Ceres), dimensionless |
| ap | semimajor axis of elliptic orbits of the rotating primaries around their barycenter, dimensionless (here, {ap (1 − e2)} = 1) |
| rH | radius of Hill sphere for large asteroid (here, Ceres), dimensionless |
| Greek symbols | |
| μ | the ratio of the mass (mass-parameter), dimensionless |
| Subscripts | |
| 1, 2 | components of distances of projectile from each of primaries with mass MSun and mplanet, accordingly |
Appendix A1. Estimation of Absolute Magnitudes for Parameter h
References
- Walsh, K.J. Rubble pile asteroids. Annu. Rev. Astron. Astrophys. 2018, 56, 593–624. Available online: https://arxiv.org/abs/1810.01815 (accessed on 27 February 2022). [CrossRef] [Green Version]
- Ershkov, S.V.; Leshchenko, D. On the dynamics OF NON-RIGID asteroid rotation. Acta Astronaut. 2019, 161, 40–43. [Google Scholar] [CrossRef] [Green Version]
- Llibre, J.; Conxita, P. On the elliptic restricted three-body problem. Celest. Mech. Dyn. Astron. 1990, 48, 319–345. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Rachinskaya, A. On the motion of small satellite near the planet in ER3BP. J. Astronaut. Sci. 2021, 68, 26–37. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Rachinskaya, A. Note on the trapped motion in ER3BP at the vicinity of barycenter. Ingenieur-Archiv. 2020, 91, 997–1005. [Google Scholar] [CrossRef]
- Ershkov, S.; Rachinskaya, A. Semi-analytical solution for the trapped orbits of satellite near the planet in ER3BP. Ingenieur-Archiv. 2020, 91, 1407–1422. [Google Scholar] [CrossRef]
- Marcus, M.L.; Sloane, J.B.; Ortiz, O.B.; Barbee, B.W. Planetary defense mission using guided collision of near-earth objects. J. Spacecr. Rocket. 2017, 54, 985–992. [Google Scholar] [CrossRef]
- Chesley, S.R.; Chodas, P.W.; Milani, A.; Valsecchi, G.; Yeomans, D.K. Quantifying the risk posed by potential earth impacts. Icarus 2002, 159, 423–432. [Google Scholar] [CrossRef]
- Asteroid Size Estimator. Available online: https://cneos.jpl.nasa.gov/tools/ast_size_est.html (accessed on 27 February 2022).
- Cellino, A.; Zappalà, V.; Davis, D.R.; Farinella, P.; Paolicchi, P. Asteroid collisional evolution. I. Angular momentum splash: Despinning asteroids through catastrophic collisions. Icarus 1990, 87, 391–402. [Google Scholar] [CrossRef]
- Dvorak, R.; Freistetter, F. Dynamical evolution and collisions of asteroids with the earth. Planet. Space Sci. 2001, 49, 803–809. [Google Scholar] [CrossRef]
- Harris, A. Asteroid rotation rates: II. A theory for the collisional evolution of rotation rates. Icarus 1979, 40, 145–153. [Google Scholar] [CrossRef]
- O’Keefe, J.D.; Ahrens, T.J. Impact ejecta on the moon. In Proceedings of the 7th Lunar and Planetary Science Conference, Houston, TX, USA, 15–19 March 1976; pp. 3007–3025, published by NASA by Israel Programm for Scientific Translations, John Wiley & Sons, New York-Toronto, und Keter Publishing House Ltd., Jerusalem. [Google Scholar]
- Ashenberg, J. Satellite pitch dynamics in the elliptic problem of three bodies. J. Guid. Control. Dyn. 1996, 19, 68–74. [Google Scholar] [CrossRef]
- Beletskii, V.V. Motion of an Artificial Satellite about Its Center of Mass. NASA TT F-429. 1966. (In Russian) [Google Scholar]
- Arnold, V.I. Stability of equilibriu mp osition of a Hamiltonian system of ordinary differential equations in general elliptic case. Doklady Akademii Nauk SSSR 1961, 137, 255. [Google Scholar]
- Bennett, A. Characteristic exponents of the five equilibrium solutions in the elliptically restricted problem. Icarus 1965, 4, 177–187. [Google Scholar] [CrossRef]
- Narayan, A.; Usha, T. Stability of triangular equilibriumpoints in the elliptic restricted problem of three bodies with radiating and triaxial primaries. Astrophys. Space Sci. 2014, 351, 135–142. [Google Scholar] [CrossRef]
- Danby, J.M.A. Stability of the triangular points in the elliptic restricted problem of three bodies. Astron. J. 1964, 69, 165. [Google Scholar] [CrossRef]
- Şelaru, D.; Cucu-Dumitrescu, C. Infinitesimal orbits around lagrange points in the elliptic, restricted three-body problem. Celest. Mech. Dyn. Astron. 1995, 61, 333–346. [Google Scholar] [CrossRef]
- Roberts, G.E. Linear stability of the elliptic lagrangian triangle solutions in the three-body problem. J. Differ. Equ. 2002, 182, 191–218. [Google Scholar] [CrossRef] [Green Version]
- Danby, J.M.A. Fundamentals of Celestial Mechanics; Willmann-Bell: Richmond, VA, USA, 1988; 483p. [Google Scholar]
- Ershkov, S.; Abouelmagd, E.I.; Rachinskaya, A. A novel type of ER3BP introduced for hierarchical configuration with variable angular momentum of secondary planet. Ingenieur-Archiv. 2021, 91, 4599–4607. [Google Scholar] [CrossRef]
- Abouelmagd, E.I.; Sharaf, M.A. The motion around the libration points in the restricted three-body problem with the effect of radiation and oblateness. Astrophys. Space Sci. 2012, 344, 321–332. [Google Scholar] [CrossRef]
- Ershkov, S.V. The Yarkovsky effect in generalized photogravitational 3-body problem. Planet. Space Sci. 2012, 73, 221–223. [Google Scholar] [CrossRef] [Green Version]
- Ershkov, S.; Leshchenko, D.; Abouelmagd, E.I. About influence of differential rotation in convection zone of gaseous or fluid giant planet (Uranus) onto the parameters of orbits of satellites. Eur. Phys. J. Plus 2021, 136, 387. [Google Scholar] [CrossRef]
- Ershkov, S.V. Forbidden zones for circular regular orbits of the moons in solar system, R3BP. J. Astrophys. Astron. 2017, 38, 5. [Google Scholar] [CrossRef] [Green Version]
- Beletskii, V.V. Libration of a satellite. Earth’s artificial satellites 3. In Iskusstvennye sputniki Zemli; Akademii Nauk SSSR: Moscow, Russia, 1959; Volume 3, pp. 13–31. [Google Scholar]
- Chernousko, F.L.; Akulenko, L.D.; Leshchenko, D.D. Evolution of Motions of a Rigid Body about Its Center of Mass; Springer International Publishing AG: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Markeev, A.P. Linear Hamiltonian Systems and Some Problems of Stability of Satellite’s Motion Relative to Its Center of Mass; Regular and Chaotic Dynamics: Moscow/Izhevsk, Russia, 2009. [Google Scholar]
- Wisdom, J.; Peale, S.J.; Mignard, F. The chaotic rotation of Hyperion. Icarus 1984, 58, 137–152. [Google Scholar] [CrossRef] [Green Version]
- Goldreich, P.; Peale, S. Spin-orbit coupling in the solar system. Astron. J. 1966, 71, 425. [Google Scholar] [CrossRef]
- Khan, A.; Sharma, R.; Saha, L.M. Chaotic motion of an ellipsoidal satellite. I. Astron. J. 1998, 116, 2058–2066. [Google Scholar] [CrossRef]
- Beletsky, V.V. Reguläre und Chaotische Bewegung Starrer Körper; Teubner-Verlag: Stuttgart, Germany, 1995; ISBN 978-3-519-03229-8. [Google Scholar]
- Idrisi, M.J.; Ullagh, M.S. Non-collinear libration points in ER3BP with albedo effect and oblateness. J. Astrophys. Astron. 2017, 39, 28. [Google Scholar] [CrossRef]
- Idrisi, M.J.; Ullagh, M.S. A study of albedo effects on libration points in the elliptic restricted three-body problem. J. Astronaut. Sci. 2020, 67, 863–879. [Google Scholar] [CrossRef]
- Taqvi, Z.A.; Saxena, M.; Saha, L.M. Chaotic motion of an ellipsoidal satellite. Proc. Natl. Acad. Sci. USA 2009, 79, 259–266. [Google Scholar]
- Ansari, A.A.; Kellil, R. Dynamical behavior of motion of small oblate body in the generalized elliptic restricted 3-body problem with variable mass. Rom. Astron. J. 2021, 31, 81–100. [Google Scholar]
- Vaishwar, A.; Mishra, D.P.; Kushvah, B.S. Radiation influence on stability of triangular points in elliptic restricted three-body problem. In AIP Conference Proceedings; AIP Publishing LLC: 1305 Walt Whitman Road, Suite, Melville, NY, USA, 2019; Volume 2061, p. 020001. [Google Scholar] [CrossRef]
- Umar, A.; Singh, J. Semi-analytic solutions for the triangular points of double white dwarfs in the ER3BP: Impact of the body’s oblateness and the orbital eccentricity. Adv. Space Res. 2015, 55, 2584–2591. [Google Scholar] [CrossRef]
- Singh, J.; Umar, A. Effect of oblateness of an artificial satellite on the orbits around the triangular points of the earth–moon system in the axisymmetric ER3BP. Differ. Equ. Dyn. Syst. 2017, 25, 11–27. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D. On the stability of laplace resonance for galilean moons (Io, Europa, Ganymede). Ann. Braz. Acad. Sci. 2021, 93, e20201016. [Google Scholar] [CrossRef] [PubMed]
- Ershkov, S.; Leshchenko, D.; Rachinskaya, A. Revisiting the dynamics of finite-sized satellite near the planet in ER3BP. Arch. Appl. Mech. 2022, 92, 2397–2407. [Google Scholar] [CrossRef]
- Markeev, A.P. Libration Points in Celestial Mechanics and Cosmodynamics; Nauka: Moscow, Russia, 1978. (In Russian) [Google Scholar]
- Anderson, B.D.; Lo, M. Dynamics of asteroid 2006 RH120: Temporary capture phase. In Proceedings of the 2018 Space Flight Mechanics Meeting, Kissimmee, FL, USA, 8–12 January 2018. AIAA 2018-1689, Session: Dynamical Systems Theory Applied to Space Flight Problems. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D. Revisiting dynamics of sun center relative to barycenter of solar system or Can we move towards stars using solar self-resulting photo-gravitational force? J. Space Saf. Eng. 2022, 9, 160–164. [Google Scholar] [CrossRef]
- Ershkov, S.V.; Leshchenko, D. Revisiting apophis 2029 approach to earth (staying on shoulders of NASA’s experts) or can we be sure in almost ricocheting fly-by of apophis on 13 of April 2029 near the earth? J. Space Saf. Eng. 2022, in press. [Google Scholar]
- Zhang, T.; Li, Y.; Chen, Y.; Feng, X.; Zhu, X.; Chen, Z.; Yao, J.; Zheng, Y.; Cai, J.; Song, H.; et al. Review on space energy. Appl. Energy 2021, 292, 116896. [Google Scholar] [CrossRef]
- Ershkov, S.; Leshchenko, D.; Rachinskaya, A. Semi-analytical findings for rotational trapped motion of satellite in the vicinity of collinear points {L1, L2} in planar ER3BP. Arch. Appl. Mech. 2022, in press. [Google Scholar] [CrossRef]
- Melnikov, A.V. Rotational dynamics of asteroids approaching planets. Sol. Syst. Res. 2022, 56, 241–251. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Approx. Mass (×1018 kg) | Approx. Proportion of All Asteroids |
|---|---|---|
| 1. Ceres | 938.4 | 31% |
| 2. Vesta | 259.1 | 8.6% |
| 3. Pallas | 204 | 6.7% |
| 4. Hygiea | 87 | 3.7% |
| 5. Interamnia | 35 | 1.3% |
| 6. Eunomia | 30 | 1.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ershkov, S.; Leshchenko, D.; Rachinskaya, A. Capture in Regime of a Trapped Motion with Further Inelastic Collision for Finite-Sized Asteroid in ER3BP. Symmetry 2022, 14, 1548. https://doi.org/10.3390/sym14081548
Ershkov S, Leshchenko D, Rachinskaya A. Capture in Regime of a Trapped Motion with Further Inelastic Collision for Finite-Sized Asteroid in ER3BP. Symmetry. 2022; 14(8):1548. https://doi.org/10.3390/sym14081548
Chicago/Turabian StyleErshkov, Sergey, Dmytro Leshchenko, and Alla Rachinskaya. 2022. "Capture in Regime of a Trapped Motion with Further Inelastic Collision for Finite-Sized Asteroid in ER3BP" Symmetry 14, no. 8: 1548. https://doi.org/10.3390/sym14081548
APA StyleErshkov, S., Leshchenko, D., & Rachinskaya, A. (2022). Capture in Regime of a Trapped Motion with Further Inelastic Collision for Finite-Sized Asteroid in ER3BP. Symmetry, 14(8), 1548. https://doi.org/10.3390/sym14081548